laporan akhir praktikum getaran mekanis.docx
TRANSCRIPT
BAB I
PENDAHULUAN
1. 1. Latar Belakang
Perkembangan teknologi dan kemajuannya sedang berkembang pesat. Terutama pada
bidang otomotive dan instrument-instrumen yang digunakan dalam pengukuran untuk
mendapatkan suatu besaran yang kemudian dapat direpresentasikan menjadi hasil yang ingin
diketahui pada suatu sistem yang dikaji. Berkaitan dengan hal tersebut maka diiperlukan
untuk mengetahui besaran-besaran yang terkait instrumen tersebut, salah satunya yang paling
pokok adalah berupa getaran yang terjadi pada instrumen.
Getaran merupakan gerakan periodic dari sebuah benda atau sistem benda yang
berhubungan yang dipindahkan dari posisi kesetimbangan. Sistem teknik mengandung massa
dan elastisitas yang mampu bergerak secara relative. Apabila gerakan sistem berulang sendiri
dalam interval waktu maka gerakan itu dapat dikatakan sebagai getaran. Getaran merupakan
bentuk energi sisa dan dalam berbagai khasus tidak diinginkan. Getaran dibagi menjadi dua
yaitu:
a) Getaran Bebas
Getaran bebas adalah gerakan periodik yang diamati sebagai sistem yang
berpindah dari kedudukan kesetimbangan statis dan terjadi bila gerakan dipertahankan
oleh gaya gravitasi atau gaya pemulih elastik.
b) Getaran Paksa
Getaran paksa adalah getaran yang disebabkan gaya periodik eksternal atau
gaya intermiten yang diberikan pada sistem. Bila gaya Luar F(t)= Fo sin ωt, bekerja
pada sistem selama getarannya maka disebut getaran paksa (forced vibration). Pada
getaran paksa sistem cenderung bergetar pada frekuensi sendiri di samping mengikuti
frekuensi eksitasi. Dengan adanya gaya gesekan, bagian gerakan yang ditahan oleh
gaya eksitasi sinusoidal secara perlahan akan hilang. Dengan demikian sistem akan
bergertar dengan pada frekuensi gaya eksitasi dan mengabaikan frekuensi pribadi
sistem. Berbagai getaran yang berlanjut terus disebut getaran steady (keadaan tunak).
2.1.2. Tujuan Praktikum
Ada 3 modul praktikum yang akan dilakukan praktikan diantaranya adalah whirling
shaft, redaman coulumb, dan balancing. Dari ketiga praktikum tersebut maka diharapak
praktikan mampu :
- Mengetahui mengenai konsep getaran yang terjadi pada mesin khusunya pada mesin-
mesin industri
- Mampu mengoperasikan testing yang kaitannya pada getaran mekanis jika sewaktu-
waktu diperlukan
- Mampu mendefinisikan sebab-akibat yang terjadi pada percobaan baik
emndefinisikan rangkaian percobaan maupun dengan menganalisa error yang didapat.

(Modul 1)
BAB II
PEMBAHASAN
2. 1 Whirling Shaft
2.1.1 Dasar Teori
Whirl pada poros adalah fenomena getaran self-excited yang terjadi sering pada
poros. Untuk setiapmelemen mesin perlu dialakukan balancing secara dimamik.. Tidak
tertutup kemungkinan untuk mencapai kondisi balance dinamik sempurna. Massa unbalance
akan menyebabkan eksitasi pada putaran poros yang akan menyebabkan gaya sentrifugal
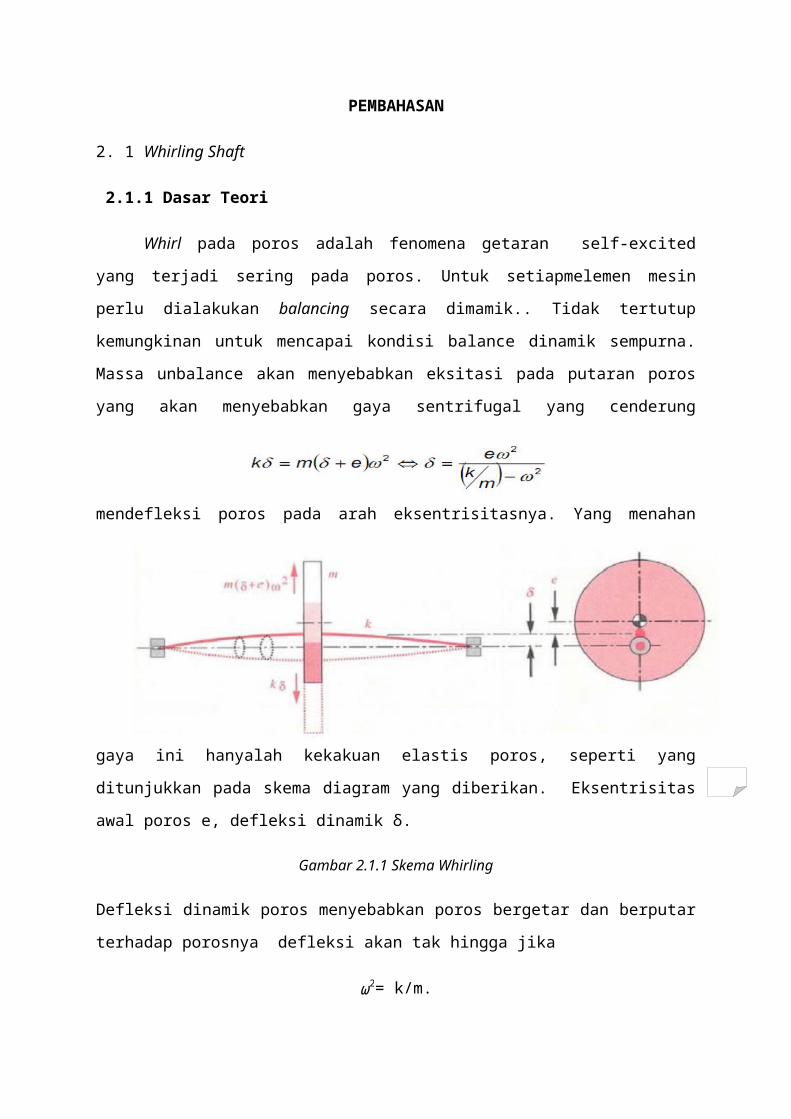
yang cenderung mendefleksi poros pada arah eksentrisitasnya. Yang menahan gaya ini
hanyalah kekakuan elastis poros, seperti yang ditunjukkan pada skema diagram yang
diberikan. Eksentrisitas awal poros e, defleksi dinamik δ.
Gambar 2.1.1 Skema Whirling
Defleksi dinamik poros menyebabkan poros bergetar dan berputar terhadap porosnya
defleksi akan tak hingga jika
ω2= k/m.
Hal ini akan terjadi ketika kecepatan putar poros sama dengan frekuensi pribadi getaran
lateral.
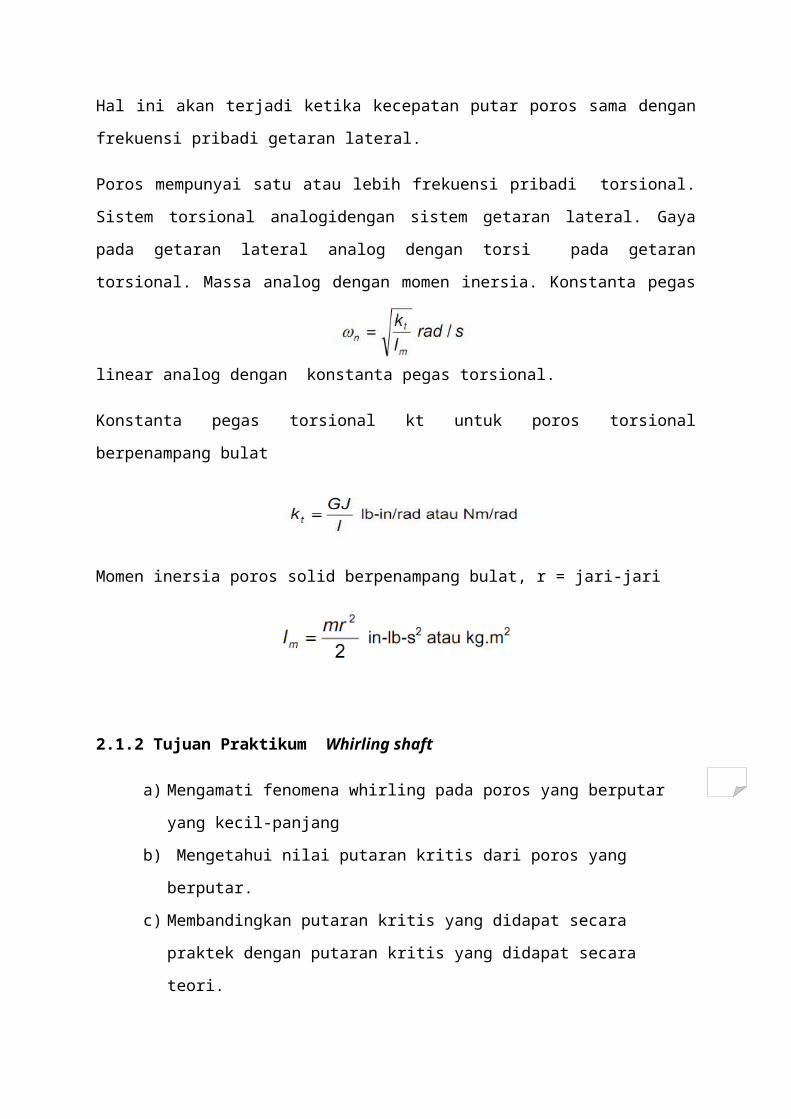
Poros mempunyai satu atau lebih frekuensi pribadi torsional. Sistem torsional analogidengan
sistem getaran lateral. Gaya pada getaran lateral analog dengan torsi pada getaran torsional.
Massa analog dengan momen inersia. Konstanta pegas linear analog dengan konstanta pegas
torsional.
Konstanta pegas torsional kt untuk poros torsional berpenampang bulat
Momen inersia poros solid berpenampang bulat, r = jari-jari
2.1.2 Tujuan Praktikum Whirling shaft
a) Mengamati fenomena whirling pada poros yang berputar yang kecil-panjang
b) Mengetahui nilai putaran kritis dari poros yang berputar.
c) Membandingkan putaran kritis yang didapat secara praktek dengan putaran kritis
yang didapat secara teori.
2.1.3 Peralatan
Untuk melakukan praktikum mengenai whirling shaft ini diperlukan alat sebagai
berikut: (a) (b)
a) Beban silinder alimunium ( 1 buah )
b) Penggaris 50 cm ( 1 buah )
c) Satu set whirling shaft apparatus
d) Power supply
e) Tachometer
f) Kunci L
Gambar 2.1.2 Rangkaian Whirling Shaft
2.1.4 Prosedur Percobaan
Untuk melakukan pratikum whirling shaft langkah kerja yang harus dilakukan adalah
sebagai berikut:
a) Merangkai Power supply, whirling shaft apparatus,beban, dan tachometer sesuai
dengan petunjuk rangkaian
b) Mengatur posisi tumpuan shaft sesuai dengan variabel yang diingkinkan. Jarak a
tumpuan shaft yang konstan terhadap beban adalah 25.5 cm (jarak a).
c) Mengatur posisi tumpuan b sesuai dengan data yang akan diambil. Data yang
diambil untuk jarak b terhadap beban 35 cm, 40 cm, 45 cm, 50 cm, dan 55 cm.
d) Menyalakan motor untuk memutar shaft.
e) Melakukan pengamatan terhadap getaran shaft.
f) Mencatat kecepatan putar shaft yang menghasilkan getaran paling besar .
g) Mematikan motor dan mengubah posisi b untuk pengamatan selanjutnya.
(c)
Gambar 2.1.1 a,b,c,peralatan-peralatan yang digunakan

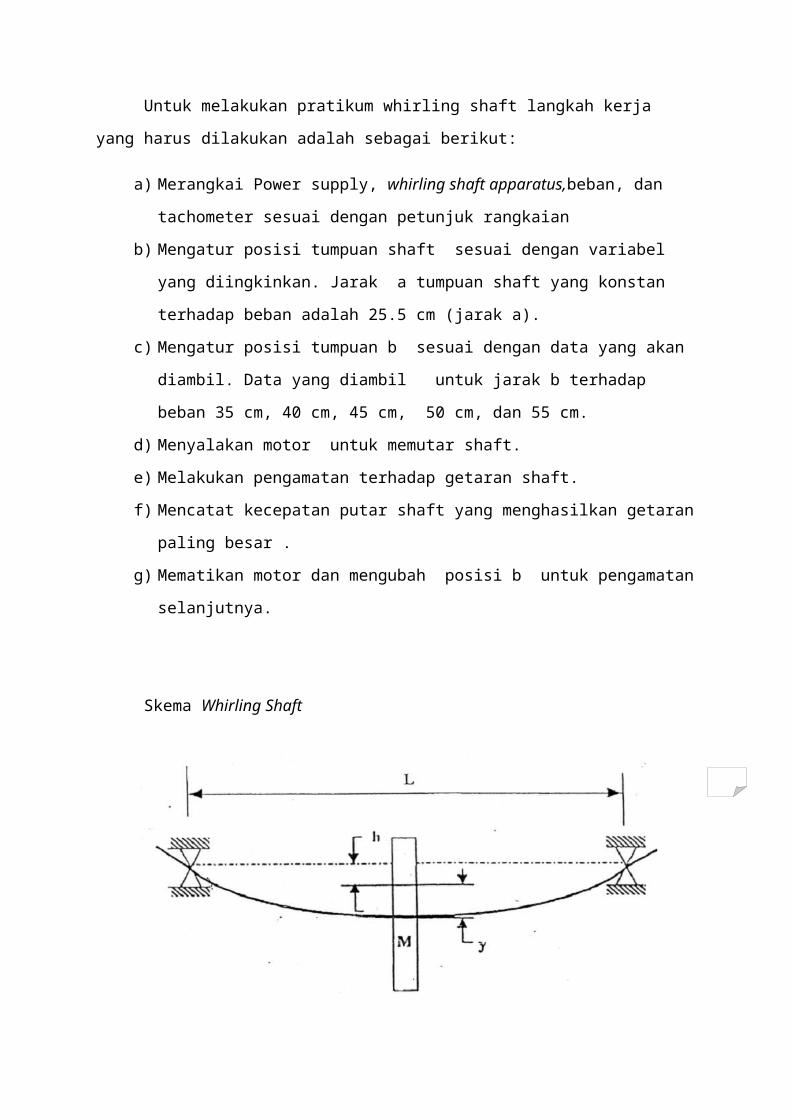
Skema Whirling Shaft
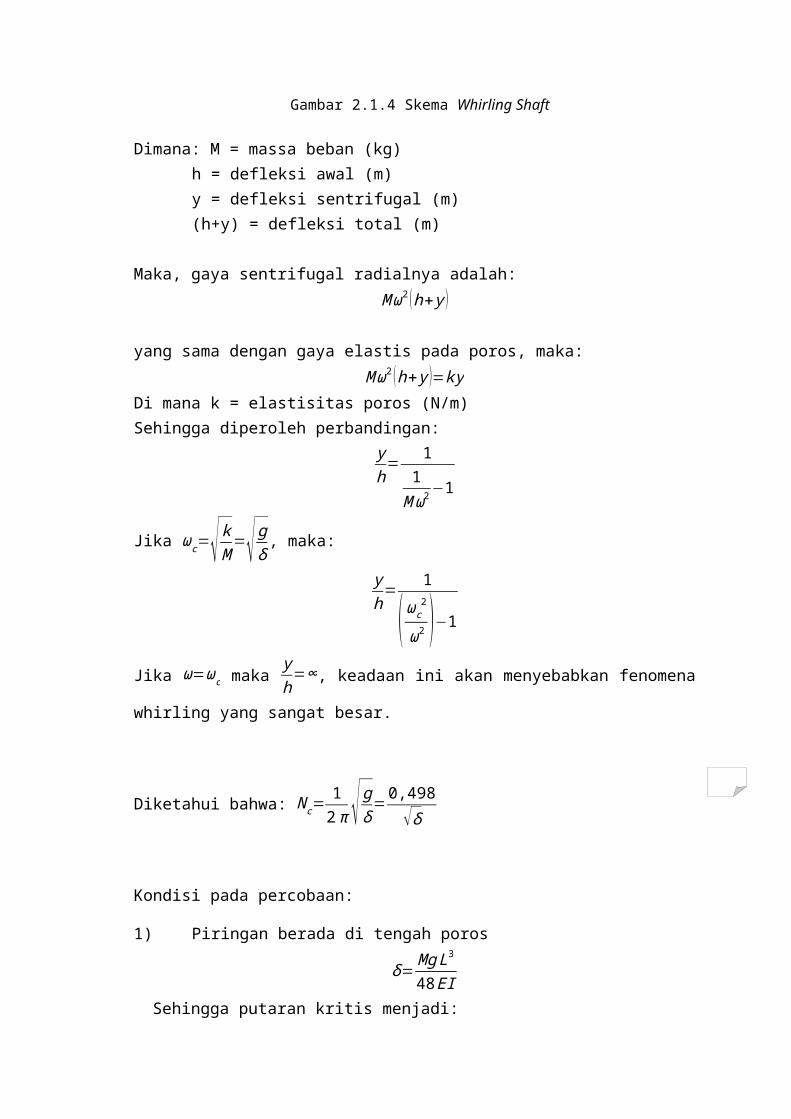
Gambar 2.1.4 Skema Whirling Shaft
Dimana: M = massa beban (kg)h = defleksi awal (m)y = defleksi sentrifugal (m)(h+y) = defleksi total (m)
Maka, gaya sentrifugal radialnya adalah:
M ω2 (h+ y )
yang sama dengan gaya elastis pada poros, maka:
M ω2 (h+ y )=kyDi mana k = elastisitas poros (N/m)Sehingga diperoleh perbandingan:
yh= 1
1
M ω2 −1
Jika ωc=√ kM
=√ gδ
, maka:
yh= 1
(ωc2
ω2 )−1
Jika ω=ωc maka yh=∞, keadaan ini akan menyebabkan fenomena whirling yang
sangat besar.
Diketahui bahwa: N c=1
2 π √ gδ=0,498
√δ
Kondisi pada percobaan:
1) Piringan berada di tengah poros
δ= Mg L3
48 EISehingga putaran kritis menjadi:
N c=1,103√ EIM L3
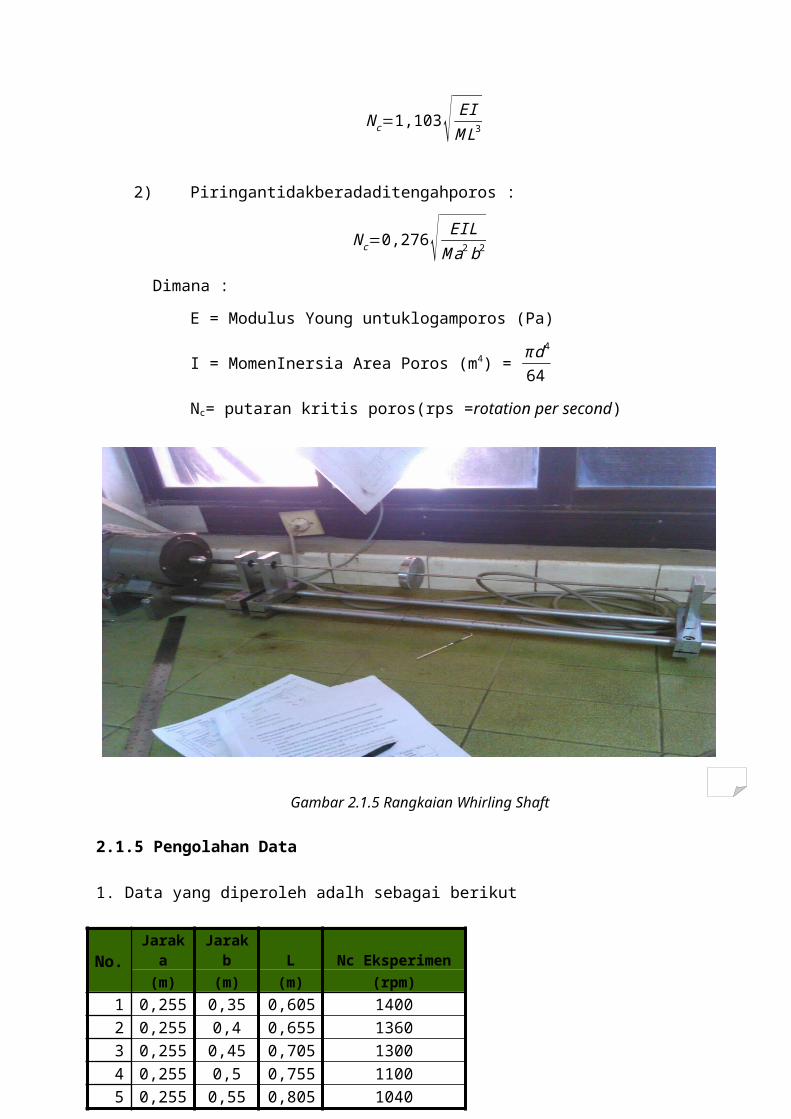
2) Piringantidakberadaditengahporos :
N c=0,276 √ EILM a2b2
Dimana :
E = Modulus Young untuklogamporos (Pa)
I = MomenInersia Area Poros (m4) = π d 4
64
Nc= putaran kritis poros(rps =rotation per second)
Gambar 2.1.5 Rangkaian Whirling Shaft
2.1.5 Pengolahan Data
1. Data yang diperoleh adalh sebagai berikut
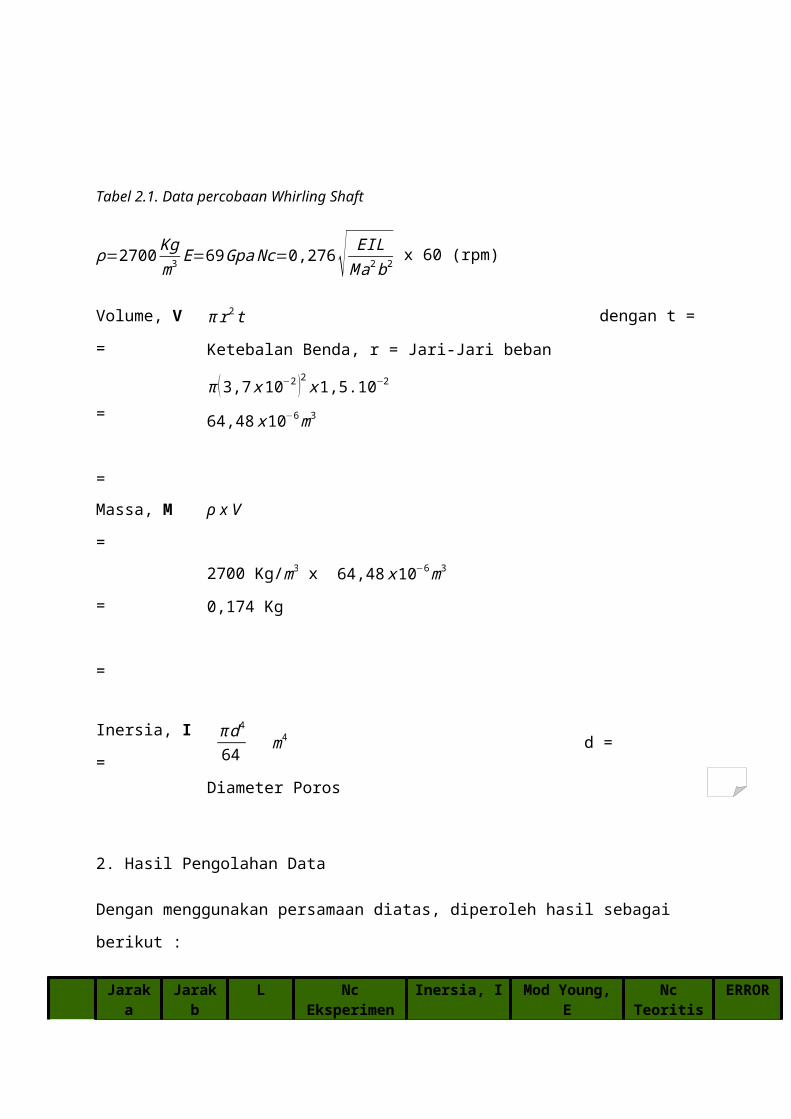
Tabel 2.1. Data percobaan Whirling Shaft
ρ=2700Kgm3 E=69 Gpa Nc=0,276√ EIL
M a2 b2 x 60 (rpm)
Volume, V =
=
=
π r2t dengan t = Ketebalan Benda, r = Jari-Jari beban
π (3,7 x10−2)2x1,5.10−2
64,48 x10−6 m3
Massa, M = x V ρ
=
=
2700 Kg/m3 x 64,48 x10−6 m3
0,174 Kg
Inersia, I = π d 4
64 m4 d = Diameter Poros
2. Hasil Pengolahan Data
Dengan menggunakan persamaan diatas, diperoleh hasil sebagai berikut :
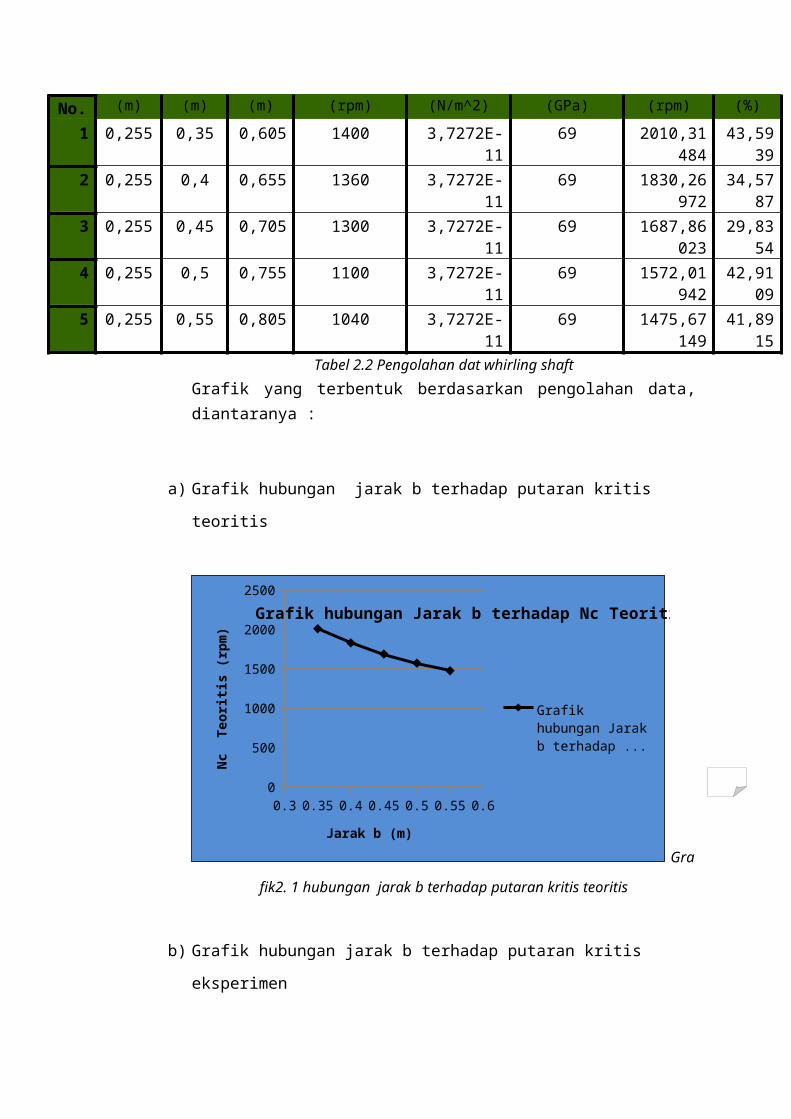
No.Jarak a Jarak b L Nc Eksperimen Inersia, I Mod Young, E Nc Teoritis ERROR
(m) (m) (m) (rpm) (N/m^2) (GPa) (rpm) (%)
1 0,255 0,35 0,605 1400 3,7272E-11 69 2010,31484
43,5939
2 0,255 0,4 0,655 1360 3,7272E-11 69 1830,26972
34,5787
3 0,255 0,45 0,705 1300 3,7272E-11 69 1687,86023
29,8354
4 0,255 0,5 0,755 1100 3,7272E-11 69 1572,01942
42,9109
No.Jarak a Jarak b L Nc Eksperimen
(m) (m) (m) (rpm)
1 0,255 0,35 0,605 14002 0,255 0,4 0,655 13603 0,255 0,45 0,705 13004 0,255 0,5 0,755 11005 0,255 0,55 0,805 1040
5 0,255 0,55 0,805 1040 3,7272E-11 69 1475,67149
41,8915
Tabel 2.2 Pengolahan dat whirling shaft
Grafik yang terbentuk berdasarkan pengolahan data, diantaranya :
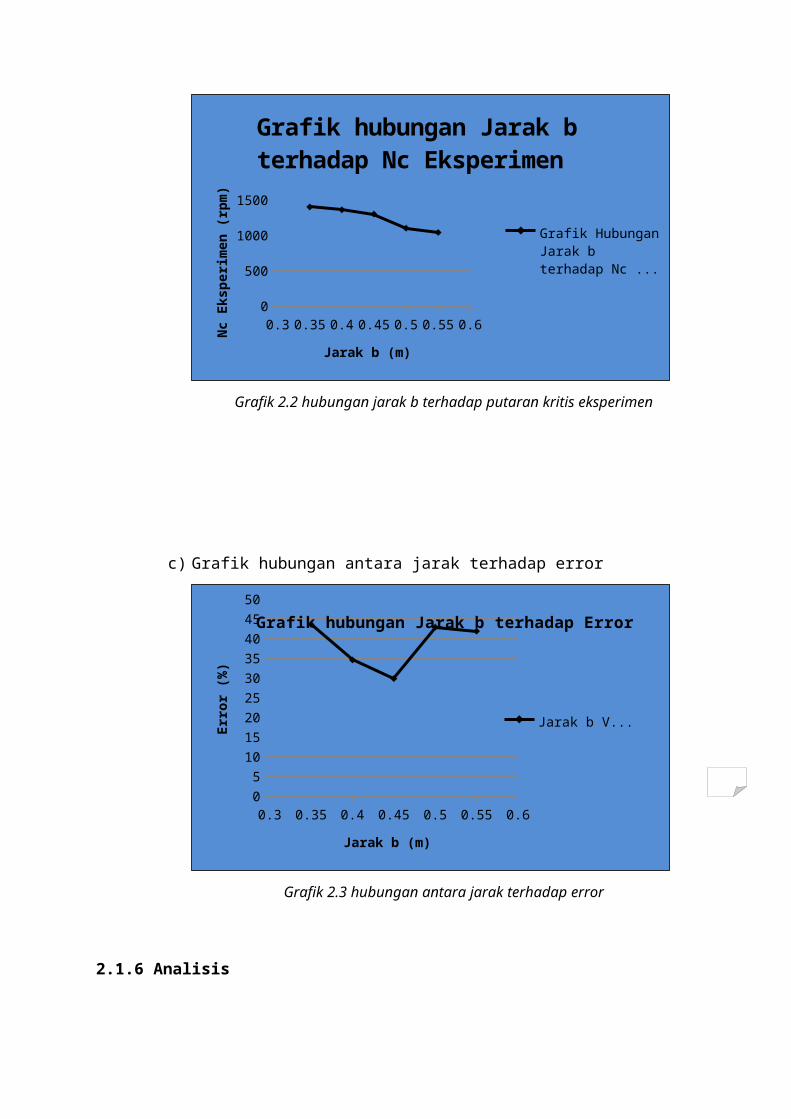
a) Grafik hubungan jarak b terhadap putaran kritis teoritis
0.3 0.35 0.4 0.45 0.5 0.55 0.60
500
1000
1500
2000
2500
Grafik hubungan Jarak b terhadap Nc Teoritis
Jarak b (m)
Nc
Teo
riti
s (r
pm
)
Grafik hubungan Jarak b terhadap Nc Teoritis
Grafik2. 1 hubungan jarak b terhadap putaran kritis teoritis
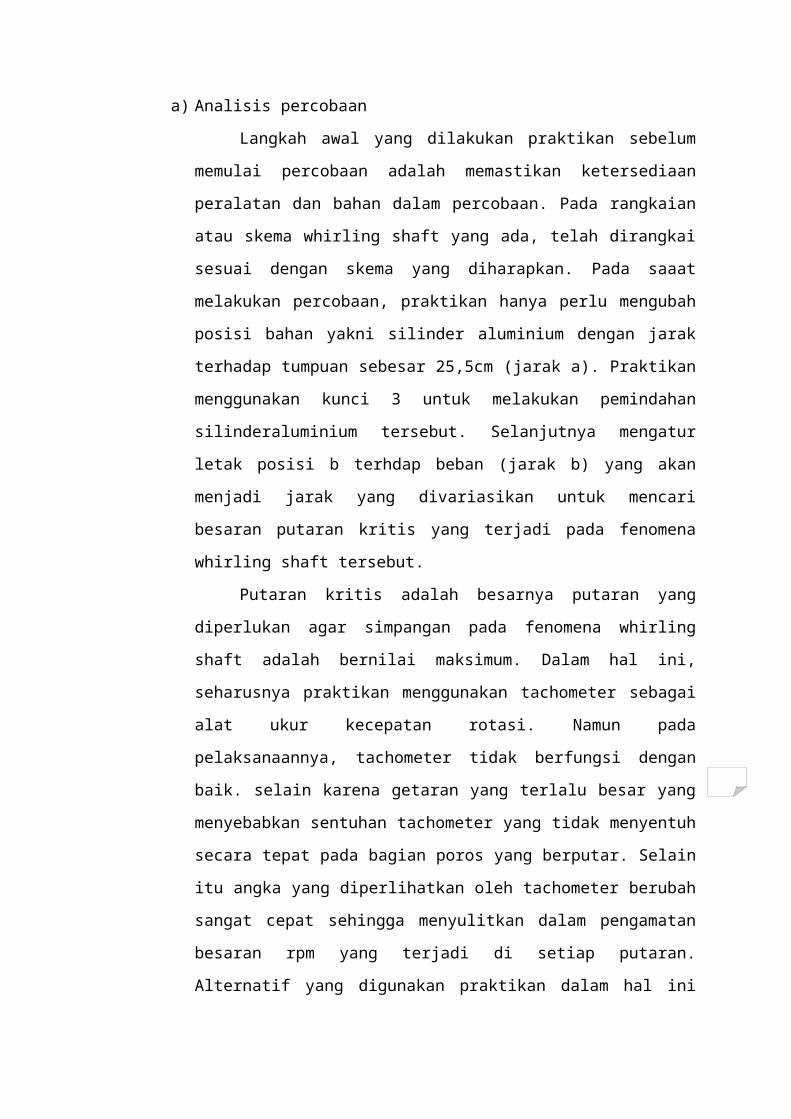
b) Grafik hubungan jarak b terhadap putaran kritis eksperimen
0.3 0.35 0.4 0.45 0.5 0.55 0.60
500
1000
1500
Grafik hubungan Jarak b terhadap Nc Eksperimen
Grafik Hubungan Jarak b terhadap Nc Eksperimen
Jarak b (m)
Nc
Ek
sper
imen
(rp
m)
Grafik 2.2 hubungan jarak b terhadap putaran kritis eksperimen
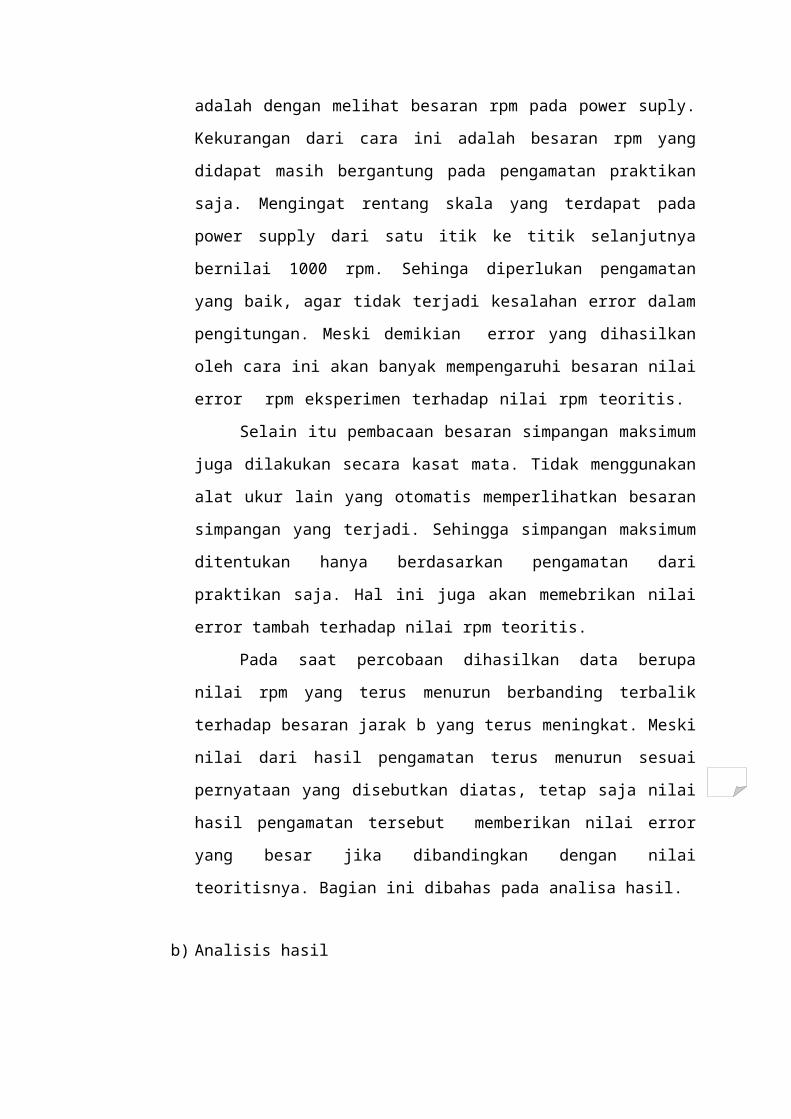
c) Grafik hubungan antara jarak terhadap error
0.3 0.35 0.4 0.45 0.5 0.55 0.60
5
10
15
20
25
30
35
40
45
50
Jarak b VS Error
Jarak b (m)
Err
or (
%)
Grafik hubungan Jarak b terhadap Error
Grafik 2.3 hubungan antara jarak terhadap error
2.1.6 Analisis
a) Analisis percobaan
Langkah awal yang dilakukan praktikan sebelum memulai percobaan
adalah memastikan ketersediaan peralatan dan bahan dalam percobaan. Pada
rangkaian atau skema whirling shaft yang ada, telah dirangkai sesuai dengan
skema yang diharapkan. Pada saaat melakukan percobaan, praktikan hanya
perlu mengubah posisi bahan yakni silinder aluminium dengan jarak terhadap
tumpuan sebesar 25,5cm (jarak a). Praktikan menggunakan kunci 3 untuk
melakukan pemindahan silinderaluminium tersebut. Selanjutnya mengatur
letak posisi b terhdap beban (jarak b) yang akan menjadi jarak yang
divariasikan untuk mencari besaran putaran kritis yang terjadi pada fenomena
whirling shaft tersebut.
Putaran kritis adalah besarnya putaran yang diperlukan agar simpangan
pada fenomena whirling shaft adalah bernilai maksimum. Dalam hal ini,
seharusnya praktikan menggunakan tachometer sebagai alat ukur kecepatan
rotasi. Namun pada pelaksanaannya, tachometer tidak berfungsi dengan baik.
selain karena getaran yang terlalu besar yang menyebabkan sentuhan
tachometer yang tidak menyentuh secara tepat pada bagian poros yang
berputar. Selain itu angka yang diperlihatkan oleh tachometer berubah sangat
cepat sehingga menyulitkan dalam pengamatan besaran rpm yang terjadi di
setiap putaran. Alternatif yang digunakan praktikan dalam hal ini adalah
dengan melihat besaran rpm pada power suply. Kekurangan dari cara ini
adalah besaran rpm yang didapat masih bergantung pada pengamatan
praktikan saja. Mengingat rentang skala yang terdapat pada power supply dari
satu itik ke titik selanjutnya bernilai 1000 rpm. Sehinga diperlukan
pengamatan yang baik, agar tidak terjadi kesalahan error dalam pengitungan.
Meski demikian error yang dihasilkan oleh cara ini akan banyak
mempengaruhi besaran nilai error rpm eksperimen terhadap nilai rpm teoritis.
Selain itu pembacaan besaran simpangan maksimum juga dilakukan
secara kasat mata. Tidak menggunakan alat ukur lain yang otomatis
memperlihatkan besaran simpangan yang terjadi. Sehingga simpangan
maksimum ditentukan hanya berdasarkan pengamatan dari praktikan saja. Hal
ini juga akan memebrikan nilai error tambah terhadap nilai rpm teoritis.
Pada saat percobaan dihasilkan data berupa nilai rpm yang terus
menurun berbanding terbalik terhadap besaran jarak b yang terus meningkat.
Meski nilai dari hasil pengamatan terus menurun sesuai pernyataan yang
disebutkan diatas, tetap saja nilai hasil pengamatan tersebut memberikan nilai
error yang besar jika dibandingkan dengan nilai teoritisnya. Bagian ini
dibahas pada analisa hasil.
b) Analisis hasil
Berdasarkan hasil pengolahan data diketahui besaran dari kecepatan
putaran kritikal (rpm) yang dilakukan jika ditinjau dari segi teoritis. Besarnya
nilai rpm menunjukkan karakteristik yang semakin menurun terhadap
penambahan jarak b terhadap beban. Karakteristik yang didapat
menunjukkan hasil yang sebanding dengan nilai rpm yang dihasilkan secara
eksperimen. Namun dalam hal ini, perlu diperhaikan bahwa nilai keceatan
putar kritikal eksperimen dan nilai kecepatan putar kritikal teoritis terpaut
rentang yang cukup besar. Bahkan berdasarkan data error yang dihasilkan
pada percobaan pertama besaran error mencapai 45%. Hal ini menyatakan
bahwa meski nilai kecepatan putaran sebanding namun besaran nilai yang
dihasilkan jauh melampaui nilai kecepatan putar eksperimen.
Hipotsis awal adalah kesalahan atau error yang akan didapat hanya
berkisar pada 10-15%. Hal ini dikarenakan anggapan praktikan, kesalahan
hanya terjadi pada saat pengukuran rpm. Karena skala yang diberikan cukup
besar yakni berkisar pada rentang 1000 rpm setiap kenaikan level. Namun
harusnya jika memang demikian, maka nilai error eksperimen tidak akan
mendekati setengah nilai dari kecepatan putar teoritis.
Gambar 2.2.6 Power suply
Selain itu meski pembacaan nilai kecepatan putaran eksperimen
dilakukan pada bagian power suply, praktikan juga mencoba melakukan
pembacaan kecepatan lewat tachometer, meski nilai yang muncul tidak selalu
konstan akibat besarnya getaran yang menyulitkan pada saat penempelan
tachometer pada poros beban. Nilai yang muncul pada tachometer justru
memiliki nilai yang lebih rendah dibanding nilai keepatan putar eksperimen
jika dilihat melalui pembacaan pada power supply. Yang artinya jika tetap
menggunakan hasil yang tertera pada tachometer akan otomatismemberikan
nilai error yang lebih besar bahkan bisa melebihi 50% dari nilai kecepatan
putar teoritis yang dihasilkan.
Untuk itu perlu ditinjau kembali pada bagian mana yang benar-benar
memberikan kesalah atau error yang besar pada saat eksperimen. Hal yang
perlu diperhatikan juga adalah material dari beban yang digunakan. Beban
yang digunakan sebelumnya tidak dilakukan pengukuran kembali terhadap
nilai propertiesnya. Padahal beban ini seringkali digunakan untuk percobaan
praktikum. Hal ini akan mempengaruhi nilai praoperties dari beban, yang
nantinya akan berpengaruh pada nilai kekauan serta berpengaruh pula pada
nilai Modulus Young dari benda.
Selain itu error yang terjadi bisa juga dakibatkan oleh adanya
ketidakakuratan pada saat pengukuran jarak maupun pengukuran tebal dan
diameter baik diameter beban maupun poros. Karena dalam hal ini praktikan
hanya menggunaklan penggaris yang tingkat ketelitiannya hanya sebesar 1
mm. Pengukuran dari bagian tengah beban terhadap bagian tengah tumpuna
hanya didasarkan pada perkiraan praktikan, karena tidak ada ukuran pasti
terhadap nilai tengah aik pada beban maupun pada bagian tumpuan.
Kesalahan atau error juga bisa terjadi pada saat pengukuran kecepatan
kritikal, dmana simpangan terbesar yang erjadi tidak dapat diketahui secara
pasti. Simpangan yang dianggap sebagai simpangan terbesar hanya
berdasarkan pengamatan praktikan, bukan berdasarkan grafik vibration yang
teerbentuk. Pada kasus ini, dimungkinkan turut menyumbang nilai error yang
paling besar diantara kemungkinan analisa –analisa lainnya.
c) Analisis grafik
Dari hasil pengolahan data, dihasilkan tiga grafik yang menunjukkan
hubungan antara jarak b yang divariasikan terhadap nilai Kecepatan putar
kritikal baik untuk kecepatan kritikal dari hasil eksperimental maupun
kecepatan putar kritikal yang dihasilkan pada perhitungan secara teoriti.
Grafik yang menunjukkan hubungan variasi jarak b terhadap kecepatan putar
eksperimental memiliki karkteristik yang sama terhadap kecepatan putar
teoritis. Hal ini menunjukkan bahwa semakin panjang jarak beban terhadap
tumpuan maka nilai kecepatan putaran kritikal akan semakin rendah. Hal ini
dipengaruhi oleh inersia yang dialami oleh poros yang digunakan.
Pada kedua grafik tersebut meski mennjukkan karakteristik yang sama
diaman tejadi penurunan keepatan putar kritikal, namun pada bagian grafik
kecepatan putar eksperimental gradien yang terbentuk dari hasil kecepatan
tersebut memiliki bentuk yang tidak selinear dibanding grafik yang terbentuk
pada kecepatan putar teoritis. Pada beberapa bagian (eksperimental) hasil
plotting memiliki kecenderungan yang tidak stabil. Hal ini dikarenaan
ketidaktelitian pembacaan terhadap nilai rpm yang tertera pada power suply.
Sedangkan jika dilihat dari hasil teoritis, gradien garis yang terbentuk terlihat
lebih lurus dibanding hasil eksperimental.
Bagian-bagian nilai kecepatan putar eksperimental yang cenderung
tidak stabil tersebut yang kemudian akan memberikan nilai error yang
semakin besar jika dibanding ada percobaan-percobaan lainnya. Pada grafik
error yang terbentuk, menunjukkan pada percobaan ke tiga dari pengambilan
data tersebut nilai error turun menjadi paling kecil diantara percobaan lainnya.
Hal ini menunjukkan pembacaan yang sedikit lebih teliti dibanding
pembacaan rpm pada percobaan yang lain. Meskipun demikian nilai kesalahn
atau error yang tertera pada grafik masih dibawah angka 50% .
2.1.7. Kesimpulan
a) Terjadi whirling pada poros kecil – panjang akibat gaya sentrifugal dari beban.
b)Getaran Poros maksimum ketika nilai putaran rpm putar senilai dengan
putaran kritisnya.
c) Putaran kritis poros dapat ditentukan melalui perhitungan teoritis untuk
mencegah pengoperasian poros pada putaran kritisnya.
d)Putaran kritis akan semakin menurun dengan penambahan jarak dari tumpuan
terhadap beban
(Modul 2)
BAB II
PEMBAHASAN
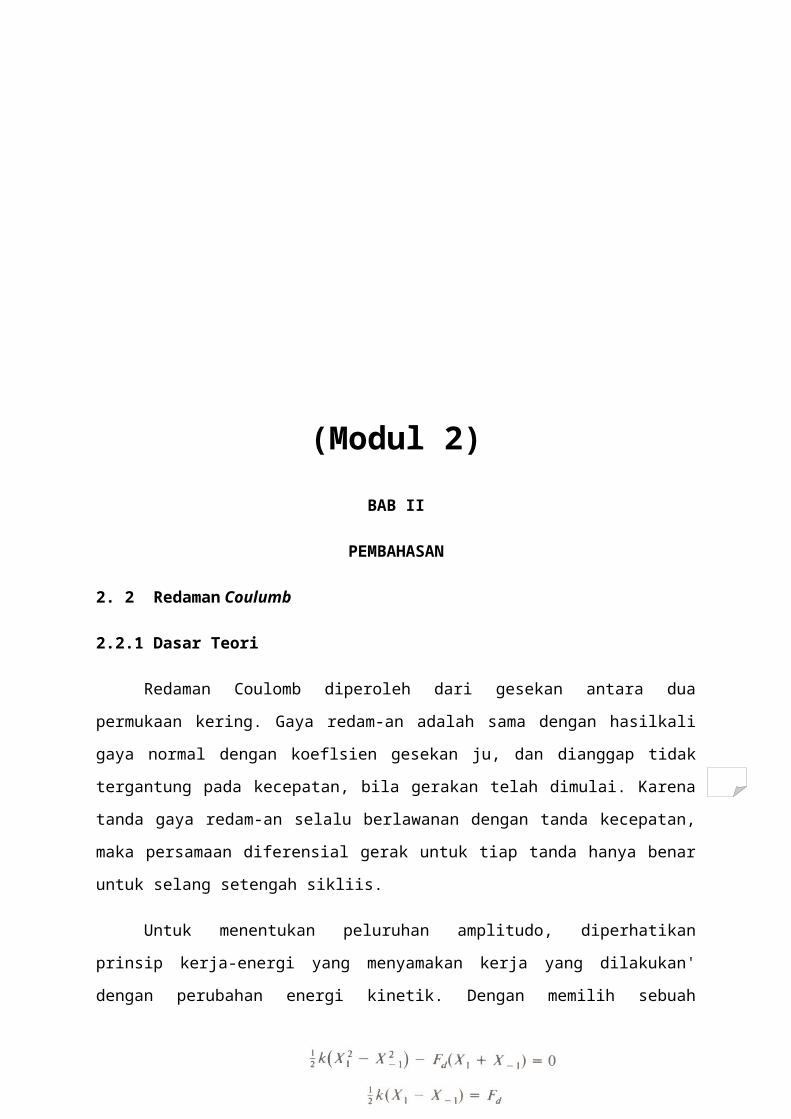
2. 2 Redaman Coulumb
2.2.1 Dasar Teori
Redaman Coulomb diperoleh dari gesekan antara dua permukaan kering. Gaya
redam-an adalah sama dengan hasilkali gaya normal dengan koeflsien gesekan ju, dan
dianggap tidak tergantung pada kecepatan, bila gerakan telah dimulai. Karena tanda gaya
redam-an selalu berlawanan dengan tanda kecepatan, maka persamaan diferensial gerak
untuk tiap tanda hanya benar untuk selang setengah sikliis.
Untuk menentukan peluruhan amplitudo, diperhatikan prinsip kerja-energi yang
menyamakan kerja yang dilakukan' dengan perubahan energi kinetik. Dengan memilih
sebuah setengah siklus yang dimulai dari posisi ekstrim dengan kecepatan yang sama dengan
nol dan amplitudo sama dengan Xi , maka perubahan energi kinetik adalah nol dan kerja yang
dilakukan pada m adalah juga nol.
dengan X-1 adalah amplitudo setelah setengah siklus seperti yang ditunjukkan dalarn gambar
berikut.

Bila prosedur ini diulang untuk setengah siklus berikutnya, maka diperoleh
pengurangan amplitude lagi sebesar 2Fd /k, sehingga peluruhan amplitude per siklus adalah
konstan dan sama dengan
X1−X 2=
4 Fd
k
Gerak akan berhenti, bila ampb'tudonya adalah lebih kecil dari A. Pada posisi itu gaya
pegas tidak cukup untuk mengatasi gaya gesekan statik, yang biasanya lebih besar dari gaya
gesekan kinetik. Dapat ditunjukkan juga bahwa frekuensi osilasi adalah
ωμ=√k /m
yang adalah sama dengan frekuensi sistem yang tak teredam. Perlu dicatat bahwa amplitude
meluruh secara linier terhadap waktu, '
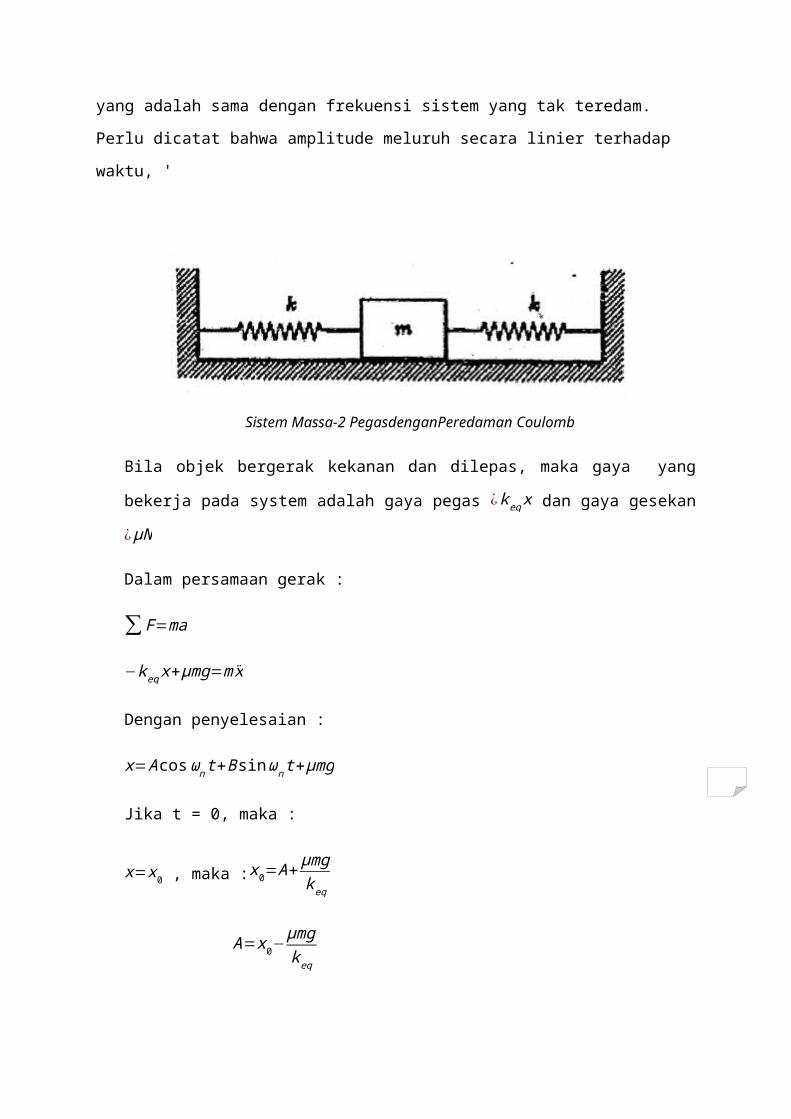
Sistem Massa-2 PegasdenganPeredaman Coulomb
Bila objek bergerak kekanan dan dilepas, maka gaya yang bekerja pada system adalah
gaya pegas ¿k eq x dan gaya gesekan ¿ μN
Dalam persamaan gerak :
∑ F=ma
−k eq x+μmg=m x
Dengan penyelesaian :
x=A cos ωn t+B sin ωnt+μmg
Jika t = 0, maka :
x=x0 , maka :x0=A+ μmgkeq
A=x0−μmgkeq
x=0, maka :ωn B=0
Karenaωn tidak selalu 0, maka B = 0
Maka penyelesaiannya berbentuk :
x=(x0−μmgk eq
)cos ωn t+μmgkeq
Dari persamaan diatas dapat diketahui bahwa peredaman dalam system terjadi karena
amplitude gerakan berkurang secara kontinu. Setiap setengah siklus, amplitude getaran
berkurang sebesar2( μmgkeq
).Mencari frekuensi natural :
Dari persamaan gerak :
m x+keq(x−μmgkeq
)=0
Dengan :
x '=x−μmgk eq
x '= x
x '= x
Maka :
m x'+k eq x'=0
x '+k eq
mx '=0
Sehingga :
ωn=√ keq
m
Dengan frekuensi :
f n=1
2 π √ keq
m
Dan perioda :
τ n=2π √ mkeq
Dalam percobaan, akan dilakukan perbandingan antara massa objek yang diukur dengan
timbangan dengan massa objek yang didapat dengan menggunakan rumus :
m=τn
2 keq
4 π2
Setelah itu, persentase kesalahan akan dihitung dengan menggunakan rumus :
error=|m−mtimbang|
mtimbang
.100%
2.2.2 Tujuan Praktikum Redaman Coulumb
a) Mengukur massa dari suatu objek melalui periode naturalnya
b) Membandingkan massa objek yang didapat melalui periode natural
dengan massa yang dengan menggunakan timbangan.

2.2.3 Peralatan
Untuk melakukan praktikum mengenai getaran bebas dengan peredaman coulomb
ini diperlukan alat sebagai berikut:
a) Rangkaian pegas
b) Beban
c) Penggaris
d) Stopwatch
2.2.4 Prosedur Percobaan
Untuk melakukan pratikum getaran bebas dengan peredaman coulomb langkah kerja
yang harus dilakukan adalah sebagai berikut:
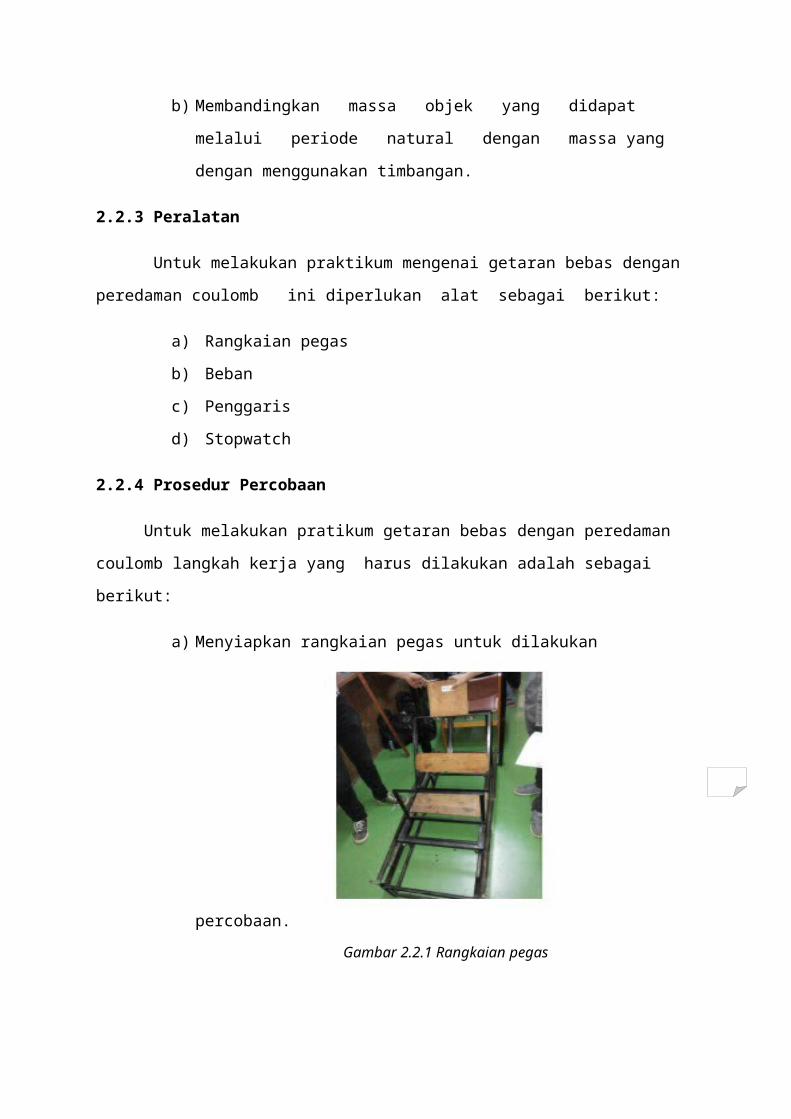
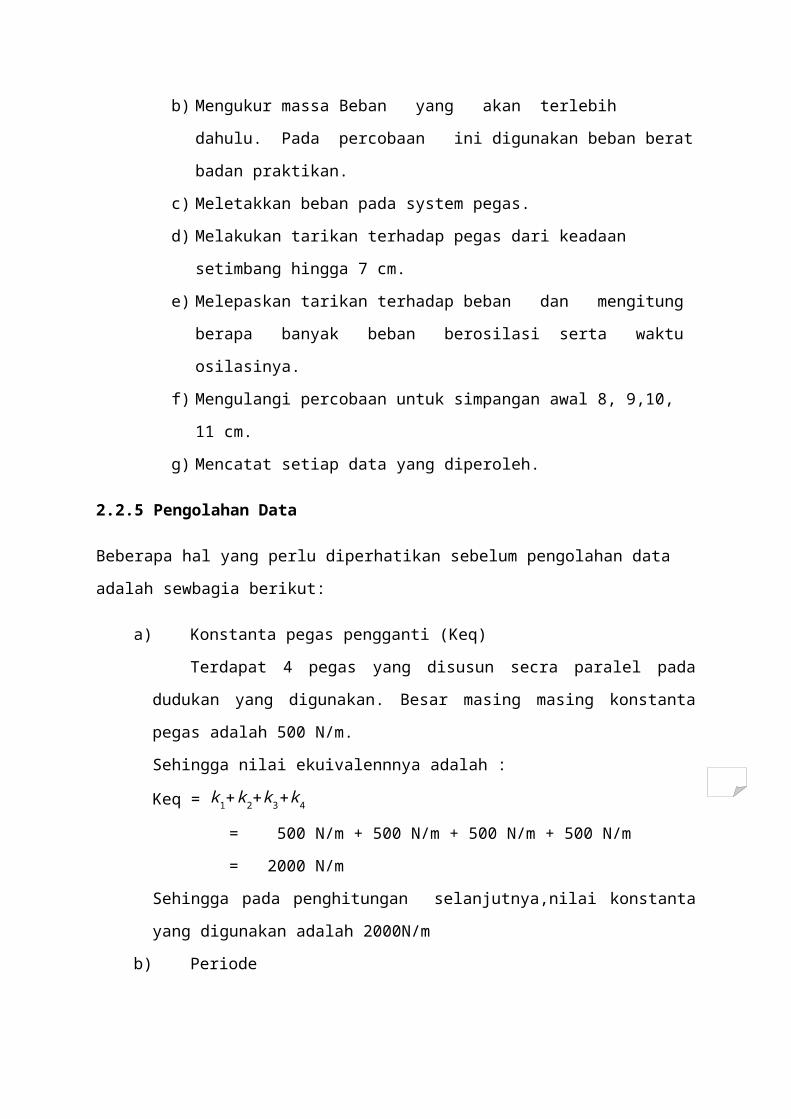
a) Menyiapkan rangkaian pegas untuk dilakukan percobaan.
Gambar 2.2.1 Rangkaian pegas
b) Mengukur massa Beban yang akan terlebih dahulu. Pada percobaan ini
digunakan beban berat badan praktikan.
c) Meletakkan beban pada system pegas.
d) Melakukan tarikan terhadap pegas dari keadaan setimbang hingga 7 cm.
e) Melepaskan tarikan terhadap beban dan mengitung berapa banyak
beban berosilasi serta waktu osilasinya.
f) Mengulangi percobaan untuk simpangan awal 8, 9,10, 11 cm.
g) Mencatat setiap data yang diperoleh.
2.2.5 Pengolahan Data
Beberapa hal yang perlu diperhatikan sebelum pengolahan data adalah sewbagia berikut:
a) Konstanta pegas pengganti (Keq)
Terdapat 4 pegas yang disusun secra paralel pada dudukan yang digunakan.
Besar masing masing konstanta pegas adalah 500 N/m.
Sehingga nilai ekuivalennnya adalah :
Keq = k 1+k2+k3+k 4
= 500 N/m + 500 N/m + 500 N/m + 500 N/m
= 2000 N/m
Sehingga pada penghitungan selanjutnya,nilai konstanta yang digunakan adalah
2000N/m
b) Periode
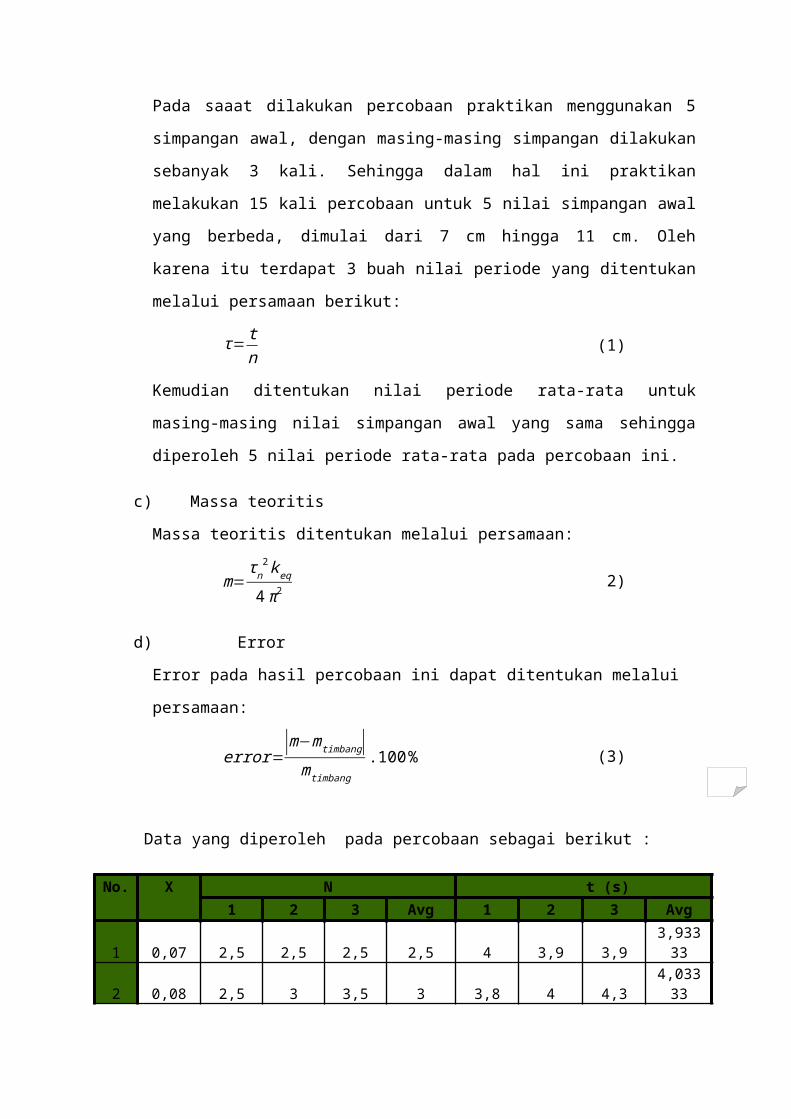
Pada saaat dilakukan percobaan praktikan menggunakan 5 simpangan awal, dengan
masing-masing simpangan dilakukan sebanyak 3 kali. Sehingga dalam hal ini
praktikan melakukan 15 kali percobaan untuk 5 nilai simpangan awal yang berbeda,
dimulai dari 7 cm hingga 11 cm. Oleh karena itu terdapat 3 buah nilai periode yang
ditentukan melalui persamaan berikut:
τ= tn
(1)
Kemudian ditentukan nilai periode rata-rata untuk masing-masing nilai simpangan
awal yang sama sehingga diperoleh 5 nilai periode rata-rata pada percobaan ini.
c) Massa teoritis
Massa teoritis ditentukan melalui persamaan:
m=τn
2 keq
4 π2 2)
d) Error
Error pada hasil percobaan ini dapat ditentukan melalui persamaan:
error=|m−mtimbang|
mtimbang
.100% (3)
Data yang diperoleh pada percobaan sebagai berikut :
No. X N t (s)1 2 3 Avg 1 2 3 Avg

1 0,07 2,5 2,5 2,5 2,5 4 3,9 3,93,9333
3
2 0,08 2,5 3 3,5 3 3,8 4 4,34,0333
33 0,09 3 3 3 3 4,5 4,4 4,6 4,5
4 0,1 3,5 3,5 3,5 3,5 4,8 5,2 4,54,8333
3
5 0,11 3,5 3,5 3,5 3,5 5,4 5,6 5,65,5333
3Tabel 2.2.1 Data Redaman Coulumb
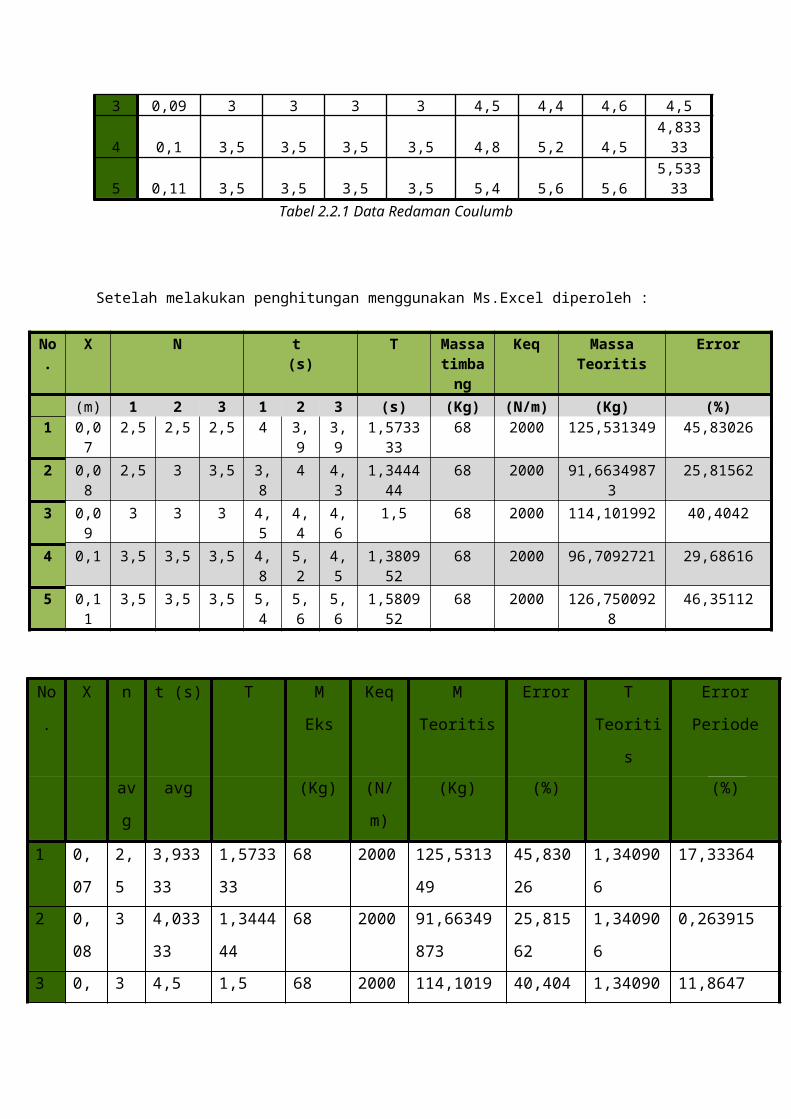
Setelah melakukan penghitungan menggunakan Ms.Excel diperoleh :
No.
X N t (s)
T Massa timban
g
Keq Massa Teoritis Error
(m) 1 2 3 1 2 3 (s) (Kg) (N/m) (Kg) (%)1 0,07 2,5 2,5 2,5 4 3,9 3,9 1,57333
368 2000 125,531349 45,83026
2 0,08 2,5 3 3,5 3,8 4 4,3 1,344444
68 2000 91,66349873 25,81562
3 0,09 3 3 3 4,5 4,4 4,6 1,5 68 2000 114,101992 40,4042
4 0,1 3,5 3,5 3,5 4,8 5,2 4,5 1,380952
68 2000 96,7092721 29,68616
5 0,11 3,5 3,5 3,5 5,4 5,6 5,6 1,580952
68 2000 126,7500928 46,35112
No
.
X n t (s) T M Eks Keq M Teoritis Error T Teoritis Error Periode
avg avg (Kg) (N/m) (Kg) (%) (%)
1 0,07 2,5 3,93333 1,573333 68 2000 125,531349 45,83026 1,340906 17,33364
2 0,08 3 4,03333 1,344444 68 2000 91,66349873 25,81562 1,340906 0,263915
3 0,09 3 4,5 1,5 68 2000 114,101992 40,4042 1,340906 11,8647
4 0,1 3,5 4,83333 1,380952 68 2000 96,7092721 29,68616 1,340906 2,986547
5 0,11 3,5 5,53333 1,580952 68 2000 126,7500928 46,35112 1,340906 17,90184
a. Grafik hubungan antara periode terhadap simpangan
1.3 1.35 1.4 1.45 1.5 1.55 1.60
0.5
1
1.5
2
2.5
3
3.5
4
Periode (t) vs Sim-pangan (n)
Periode (T)
Sim
pan
gan
(n
)
Grafik hubungan Periode terhadap Simpangan
2.2.1 Grafik hubungan antara periode terhadap simpangan
b. Grafik hubungan antara massa eksperimen terhadap simpangan
60 70 80 90 100 110 120 130 1400
0.5
1
1.5
2
2.5
3
3.5
4
Massa Vs Simpangan
Massa (M)
Sim
pan
gan
, n
Grafik hubungan Massa terhadap Simpangan
2.2.2 Grafik hubungan antara massa terhadap simpangan
c. Grafik hubungan antara error periode terhadap simpangan
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
Error Periode vs Simpangan (n)
Periode (T)
Sim
pan
gan
(n
)
Grafik hubungan Error Periode (Kg) terhadap Simpangan
2.2.3 Grafik hubungan antara Error Periode terhadap simpangan
d. Grafik hubungan antara error massa terhadap simpangan
20 25 30 35 40 45 500
0.5
1
1.5
2
2.5
3
3.5
4
Error Massa (Kg) vs Simpangan (n)
Periode (T)
Sim
pan
gan
(n
)
Grafik hubungan Error massa (Kg) terhadap Simpangan
2.2.3 Grafik hubungan antara error massa terhadap simpangan
2.2.6 Analisis

a) Analisis percobaan
Rangkaian pegas yang diperlukan pada redaman coulumb untuk
keperluan praktikum telah tersedia. Sehingga praktikan tidak perlu untuk
merangkai system terlebih dahulu. System pegas yang telah tersedia adalah
berupa system pegas paralel, dimana terdapat 4 pegas masing-masing 2 pegas
pada bagian depan dan belakang dari dudukan yang dipakai. Pada dudukan
tersebut kemudian diberikan beban praktikan sendiri. Percobaan dilakukan
sesuai prosedur yang ditentukan. Pada saat tersebut juga praktikan melakukan
perhitungan waktu osilasi memnggunakan stopwatch. Tarikan pada beban
akan mengakibatkan terjadinya osilasi. Meski demikian osilasi yang terjadi
tidak terlalu besa. Hanya berkisar pada 2 hingga 4 kali osilasi.
Pada percobaan praktikan tidak melakukan perhitungan terlebih dahulu
terhadap jarak pegas dari setiap sisi yang terhubung pada dudukan. Hal ini
menyebabkan kurangnya informasi yang diperlukan untuk pengolahan data.
Praktikan hanya melakukan pengukuran pada saat penarikan beban pegas dari
kondisi setimbang. Kondisi setimbang inilah yang tidak begitu diperhatikan
oleh praktikan, apakah kondisi setimbang kembali pada posisi semula atau
terdapat pergeseran meskipun nilai nya tidak terlalu signifikan. Pangukuran
juga hanya dilakukan menggunakan penggaris dan pengamatan pun juga
hanya dilakukan sesuai yang dilihat oleh praktikan. System pegas tidak
terhubung pada system komputer sehinggga besarnya osilasi hanya sebatas
perkiraan praktikan sesuai pengamatan, mengingat disetiap pengambilan data
terlihat osilasi yang tidak penuh, dan praktikan hanya memperkirakan nilai
osilasi tersebut dalam setengah osilasi.
Selain itu letak system pegas tidak ditempatkan pada lokasi yang datar,
sehingga hipotesis sementara terhadap hal tersebut adalah bahwa
ketidakrataan system pegas akan mempengaruhi besarnya osilasi yang terjadi.
Hal lain yang juga berpengaruh terhadap nilai osilasi adalah pada saat
melepaskan tarikan, karena secara tida langsung ada sedikit gaya dorongan
yang terjadi meskipun niali dari besaranya gaya dorong tersebut sangat
sedikit.
b) Analisis hasil
Berdasarkan hasil pengolahan data pada bagian diatas, dihasilkan data
nilai simpangan rata-rata dan waktu rata-rata pada setiap percobaan. Hasil
menunjukkan variasi yang sangat berbeda satu sama lain. Pada bagian waktu,
nilai yang ditunjukkan semakin besar terhadap panjang simpangan yang
semakin bertambah. Nilai rata-rata yang dihasilkan pada simpangan juga
menunjukan kenaikan, namun besaran periode yang dihasilkan dari percobaan
ini tidak mengikuti kenaikan seperti halnya pada bagian simpangan dan
waktu. Periode yang dihasilkan menunjukkan kenaikan dan penurunan pada
saat perhitungan. Nilai periode yang didaptkan mengikuti persamaan umum
yakni
T= tn
( s−1)\
Namun hal diatas dapat dijelaskan secara teori. Periode getaran hanya
bergantung pada massa beban dan kekakuan pegas, tidak bergantung pada
simpangan awal yang diberikan. Oleh karena itu nilai periode getaran yang
dihasilkan meski tidak menunjukkan karakteristik satu sama lain, hal tersebut
dianggap bukanlah suatu kesalahan.
Selain itu kesalahan/error pada massa dihasilkan nilai yang cukup
besar,berkisar pada nilai 25%-46%. Berdasarkan pembagian jenis error, error
dikategorikan menjadi error random dan error sistematik. Kesalahan acak
(random error) adalah kesalahan yang bersumber dari variasi yang bersifat
acak dan dapat terjadi diluar kendali praktikan yang melakukan pengukuran.
Faktor kesalahan acak ini sebenarnya dapat dikurangi dengan melakukan
banyak pengulangan pengukuran. Namun karena keterbatasan waktu,
pengulangan percobaan menjad tidak mungkin untuk dilakukan.
Kesalahan selanjutnya adalah kesalah atau error Sistematik (systematic
error) atau ‘bias’ sifatnya konstan atau dapat bervariasi yang dapat
diramalkan. Kesalahan ini tidak dapat dikurangi dengan cara pengulangan
pengukuran. Walau dapat dikoreksi, tetapi tidak bisa tepat atau eksak. Pada
prinsipnya praktikan tidak dapat menghindari dari adanya ketidakpastian pada
kesalahan sistematis ini. Kesalahan sistematik terjadi akibat dari alat yang
digunakan baik alat percobaan maupun alat pengukuran. Alat pengukuran
yang digunakan dalam percobaan ini adalah penggaris kayu dan stopwatch.
Pengukuran simpangan awal dilakukan menggunakan penggaris yang
memiliki ketelitian hanya pada 0,5 mm. Selain itu ketelitian praktikan dalam
pembacaan jarak juga sangat berpengaruh dalam hal ini, mengingat untuk
menghasilkan jarak yang tepat akan sangat sulit dilakukan, karena harus
melakukan pembacaan sedang ujung penggaris lainnya berada di tumpuan
ujung yang lain. Pada saat pengukuran simpangan dilakukan salah satu
praktikan harus menahan beban agar tetap diam selama pengukuran hingga
dipastikan bahwa simpangan awal tepat seperti yang diinginkan. [enahanan
beban agar tetap berada di posisinya juga menyulitkan praktikan karena bisa
saja terjadi pergeseran yang tidak disadari oleh praktikan yang melakukan
pengukuran simpangan menggunakan penggalah orang yang berbeda,
sehingga memungkinkan adanya nilai error yang besar dalam hal ini.
Tidak hanya itu, kesalahan atau error bisa juga dihasilkan pada
pembacaan dan penyalaan stopwatch dinyalakan tidak benar-benar bersamaan
dengan dimulainya getaran, begitu juga saat stopwatch dimatikan ada
kemungkinan tidak benar-benar bersamaan dengan berhentinya getaran. Hal
ini dapat mengurangi akurasi pengukuran waktu getaran. Rangkaian pegas
yang digunakan pun tidak berfungsi sempurna karena bearing tidak ikut
berputar bersamaan dengan massa yang bergerak. Kesalahan acak terjadi
akibat keterbatasan praktikan baik dalam melakukan percobaan maupun
pengukuran.
Dalam percobaan ini ada 5 hal yang dilakukan oleh praktikan yang
berbeda, yaitu mengukur simpangan, menahan massa tetap diam, menghitung
Gambar 2.2.4 Rangkaian Pegas dan dudukan yang digunakan
getaran, mengukur waktu getaran dan mencatat data percobaan. Selama
pengukuran simpangan praktikan mengalami kesulitan dalam membaca skala
penggaris karena penggaris yang digunakan adalah penggaris kayu yang agak
sulit dilihat skalanya. Terlebih lagi jika terjadi pergeseran akibat praktikan
yang menahan massa tidak kuat menahannya, maka pengamatan saat
pengukuran simpangan pun bisa saja terjadi kesalahan. Kemudian kesalahan
lain yang mungkin terjadi adalah bahwa praktikan yang menjadi massa dalam
praktikum ini tidak benar-benar mengingat massa badannya atau massa
badannya telah berubah sejak terakhir praktikan menimbangnya. Hal ini dapat
terjadi karena praktikan yang menjadi massa tidak mengukur berat badannya
terlebih dahulu sebelum melakukan percobaan. Selain itu, kesalahan lainnya
yang mungkin terjadi adalah bahwa praktikan tidak memperhitungkan massa
dudukan/tumpuan massa pada rangkaian pegas.
Menurut analisis praktikan bahwa massa yang terhitung menggunakan
persamaan massa teoritis bukan hanya massa praktikan yang menjadi beban
pada rangkaian pegas tersebut melainkan massa dudukan massa pun termasuk
di dalamnya. Hal ini karena dudukan massa juga ikut bergetar bersama massa
(praktikan) sehingga massanya tidak dapat diabaikan. Oleh karena dalam
praktikum kali ini massa tersebut tidak diperhitungkan maka kesalahan yang
terjadi pun sangat besar.
c) Analisis grafik
Dari hasil pengolahan data yang dilakukan dihasilakn grafik periode
rata-rata terhadap simpangan, grafik massa teoritis terhadap simpangan dan
grafik error terhadap simpangan. Dari grafik periode rata-rata terhadap
simpangan terlihat bahwa periode rata-rata memiliki kecenderungan bernilai
sama meskipun simpangan awal yang diberikan berbeda. Kemudian dari
grafik massa teoritis terhadap simpangan terlihat menunjukkan pola yang
sama dengan grafik periode rata-rata terhadap simpangan. Oleh karena itu
terlihat bahwa massa teoritis cenderung memiliki nilai yang sama atau
mendekati rata-rata.
2.2.7 Kesimpulan
a) Lama waktu saat terjadi simpangan akan bertambah sebanding dengan
penambahan jarak simpangan.
b) Massa dapat dihitung melalui periode natural.
c) Massa yang diperoleh berdasarkan perhitungan teoritis dari hasil percobaan
sebanding dengan massa yang diperoleh melalui timbangan.
(Modul 3)
BAB II
PEMBAHASAN
2. 3 Balancing
2.3.1 Dasar Teori
Suatu poros dapat mengalami unbalance, yang disebabkan oleh sifat bahan poros
yang tidak homogen (lubang/void yang terjadi pada saat pembuatan poros), eksentrisitas
poros, penambahan alur dan pasak pada poros, serta distorsi yang dapat berupa retakan
(crack), bekas pengelasan, atau perubahan bentuk pada poros. Unbalance ini menyebabkan
distribusi massa yang tidak seragam di sepanjang poros atau lebih dikenal sebagai massa
unbalance (Jabir, 2003).
Prosedur perawatan untuk mengurangi unbalance pada mesin disebut balancing.
Balancing terdiri dari prosedur pengukuran getaran dan menambahkan atau mengurangi
beban untuk mengatur (adjust) distribusi massa. Tujuan balancing adalah menyeimbangkan
mesin putar, yang pada akhirnya akan mengurangi getaran (Tim Getaran Mekanis, 2002).
Gambar. 2.3.1 Rangkaian disk, dan Labview
Ada beberapa hal yang perlu diperhatikan dalam melakukan alancing terhadap suatu
sistem diantaranya sebagai berikut :
a. Frekuensi Getaran (Vibration Frequency)
Frekuensi adalah jumlah siklus pada tiap satuan waktu. Besarnya dapat dinyatakan
dengan siklus per detik (cycles per second/cps) atau siklus per menit(cycles per minute/cpm).
Frekuensi getaran penting diketahui dalam analisis getaran mesin untuk menunjukkan
masalah yang terjadi pada mesin tersebut. Dengan mengetahui frekuensi getaran, akan
memungkinkan untuk dapat mengidentifikasikan bagian mesin yang salah (fault) dan masalah
yang terjadi.
Gaya yang menyebabkan getaran dihasilkan dari gerak berputar elemen mesin. Gaya
tersebut berubah dalam besar dan arahnya sebagaimana elemen putar berubah posisinya
terhadap titik netral. Akibatnya, getaran yang dihasilkan akan mempunyai frekuensi yang
bergantung pada putaran elemen yang telah mengalami trouble. Oleh karena itu, dengan
mengetahui frekuensi getaran akan dapat diidentifikasikan bagian dari mesin yang
bermasalah.
b. Perpindahan, Kecepatan, dan Percepatan
Perpindahan (displacement), kecepatan (velocity), dan percepatan (acceleration)
diukur untuk menentukan besar dan kerasnya suatu getaran. Biasanya diwakili dengan
pengukuran amplitudo getaran. Perpindahan (displacement) adalah gerakan suatu titik dari
suatu tempat ke tempat lain yang mengacu pada suatu titik tertentu yang tidak bergerak
(tetap).
Dalam pengukuran getaran mesin, sebagai standar digunakan jarak perpindahan
puncak ke puncak (peak to peak displacement). Contohnya adalah perpindahan poros karena
gerak putarnya. Jika perpindahan poros terlalu besar sampai melebihi batas “clearance”
bantalan akan mengakibatkan rusaknya bantalan. Kecepatan (velocity) merupakan perubahan
jarak per satuan waktu. Kecepatan gerak mesin selalu dinyatakan dalam kecepatan puncak
(peak velocity). Kecepatan puncak gerakan terjadi pada simpul gelombang.
Dalam getaran, kecepatan merupakan parameter penting dan efektif, karena dari data
kecepatan akan dapat diketahui tingkat getaran yang terjadi. Sedangkan percepatan
(acceleration) adalah perubahan kecepatan per satuan waktu. Percepatan berhubungan erat
dengan gaya. Gaya yang menyebabkan getaran pada bantalan mesin atau bagian-bagian lain
dapat ditentukan dari besarnya getaran.
c. Fasa (Phase)
Fasa didefinisikan sebagai posisi elemen getaran terhadap titik tertentu atau elemen
getaran lainnya. Fasa menunjukkan perbedaan awal siklus terjadi.
Gambar 2.3.1. Beda fasa antara perpindahan, kecepatan, dan percepatan
Komponen-komponen diatas biasanya sangat mempengaruhi bagaiman peletakkan high spot
pada saat melakukan balancing. Kesalahan yang terjadi pada komponen diatas akan
mempengaruhi sistem balancing yang dibuat.
2.3.2 Tujuan Praktikum Balancing
a) Mengetahui ciri-ciri benda tidak balance
b) Melakukan balancing dengan memberikan massa counter balance
2.3.3 Peralatan
a) Mesin multiplane balancing
b) Power supply
c) Stroboskop
d) Komputer dengan program LabView
e) NI-DAQ
f) Timbangan digital
2.3.4 Prosedur Percobaan
Langkah Persiapan Balancing
a) Menghubungkan kabel USB dari NI DAQ ke computer
b) Memastikan modul NI 9234 terpasang pada NI DAQ
c) Menyambungkan kabel power NI DAQ
d) Membuka Labview dengan nama praktikum balancing
e) Mengatur /Setting physical channel, dengan minimum value -5 dan maximum
value 5
f) Mengatur waktu / setting timing parameter dengan rate= 180 Hz dan samples to
read 2000
g) Membuat file dengan nama praktikum balancing pada TDMS file path
h) Menyiapkan balancing machine tetapi jangan dahulu kabel powernya dicolok
i) Menyiapkankan belt, rotor 5 disc, kunci L 3/32” dan 5/32”, penggaris, massa-
massa, busur dan kertas kosong
j) Mengolesi bearing dengan grease
Langkah persiapan pemasangan massa
a) Memasang massa pada disk 2,3,4 pada jari-jari bebas dan putar masing-masing
disk dengan melonggarkan sekrup dengan kunci L 3/32”
b) Mencatat masing-masing massa dan sudut-sudutnya (tidak digunakan selama
percobaan ini dan digunakan sebagai pembanding dengan hasil balancing)
c) Memastikan disk 1 dan 5 posisi 0 nya berada pada posisi 0 yang ter-emboss
Langkah set up alat
a) Meletakkan rotor 5 disk pada atas bearing-bearing mesin balancing, catat disk 1
di ujung yang mana dan disk 5 diujung yang mana
b) Memasang belt
c) Mengencangkan ujung-ujung ball cradle dengan menggunakan kuncil L 5/32”
sehingga mencegah terjadinya pergerakan terhadap arah aksial rotor
d) Menyalakan mesin balancing
e) Mengatur stroboskop pada kondisi internal 12 Hz
f) Menyalakan motor
g) Mancari dimana kecepatan motor sama dengan kecepatan stroboskop menyala
sehingga rotor seakan-akan terlihat berhenti terhadapap nyala stroboskop
h) Mematikan motor dengan tidak mengubah-ubah kontrol kecepatannya, sehingga
jika motor dihidupkan motor akan bergerak pada 12 Hz
Langkah Balancing
1) Melakukan Run labview
2) Menyalakan motor pada posisi yang sudah ditetapkan
3) Menunggu hingga konsisten dan stabil . Terlihat pada grafik power spectrum
frekuensi rotor yang berputar di 12 Hz
4) Setelah stabil stop running, lalu catat rms yang terbaca
5) Memindahkan switch stroboskop ke eksternal
6) Sedikit demi sedikit swicth (knob) yang terletak dekat transduser diputar hingga
menyentuh plat (maksimum displacement dari cradle) yang dapat menyebabkan
stroboskop berkedip.
7) Melihat angka yang terletak sejajar dengan transducer (di atas switch sekrup putar)
dan catat (sebagai sudut fase dari titik referensi 0)
8) Memutar balik switch knob putar lalu matikan motor tanpa merubah kontrol
kecepatan
9) Memutar disk 5 sehingga titik 0 pada disk berada pada titik yang terbaca pada
langkah no.8 dengan longgarkan skrup 3 buah yang ada di disk dengan kunci L
3/32”
10) Dari rms yang didapat dari labview, kalibrasikan dengan grafik kalibrasi amplitudo
yang diberikan
11) Mencatat besaran U dengan memperhatikan slot yang ada pada disk koreksi (disk 5)
berjari-jari antara 45-65 mm
12) Menentukan m dan r yang cocok, berdasarkan nilai U yang didapat U = m . r
13) Menimbang massa pada timbangan digital yang ada
14) Memasang massa counterbalance pada r yang ditentukan pada langkah no.15 pada
lokasi slot yang sesuai dengan langkah no.10
15) Menyalakan kembali motor
16) Melakukan Run labview kembali
17) Mencatat rms yang terbaca setelah dalam kecepatan yang stabil
18) Mengatur stroboskop ke eksternal lalu lihat angka yang muncul pada langkah no.8
19) Mematikan motor
20) Mengulangi langkah no. 11 dan 12
21) Menjumlahkan dengan menggunakan vektor sehingga didapat U yang menggantikan
U awal
22) Memutar disk sesuai sudut yang ditunjukkan dari hasil penjumlahan vektor
23) Memasang U pengganti ini pada disk koreksi dengan set terlebeih dahulu m dan r
yang cukup pada slot tersebut
24) Mengulangi langkah-langkah balancing ini sehingga didapat amplitudo rms dibawah
2,5 sehingga bisa dianggap balance
25) Memutar posisi rotor, ujung ke ujung, sehingga disk 1 berada pada posisi disk
koreksi, dan disk 5 berada di atas penumpu
26) Gunakan langkah-langkah koreksi seperti pada disk 5
27) Mematikan mesin balancing jika suda selesai membalans
28) Melepaskan belt dari motor dan puli tanpa merubah posisi rotor
29) Mengamati pergerakan rotor setelah belt dicopot
30) Memutar setiap 90⁰dan biarkan serta amati apakah rotor berputar sendiri

31) Jika dalam setiap posisi rotor tidak berputar maka dapat dikatakan rotor dalam
keadaan balans
32) Data dari eksperimen ini bandingkan dengan cara analitikal pada slide balancing
mata kuliah getaran mekanis dari data yang didapat pada langkah persiapan
pemasangan massa no.2
2.3.5 Pengolahan Data
Data yang diperoleh dari hasil pem-balans –an adalah sebagai berikuit :
RMS AWAL UNBALANCE MASSA BAUT R BAUT RMS AKHIR
PIRINGAN 1 3,6 440 8,97 45 0,9PIRINGAN 2 3,27 380 8,44 45 2,3
Gambar 2.3.2 Rangkaian
disk yang digunakan
2.3.6 Analisis
Analisis percobaan
Dalam melaksanakan percobaan ada beberapa hal penting yang harus
diperhatikan praktikan sebelum melakukan pengambilan data. Diantaranya
peralatan uji yang hendak digunakan, ketersediaan bahan dan peralatan yang
dibutuhkan, dan standar pengkuran dimana dengan standar pengukuran tersebut
dapat diketahui berapa nilai maksimal simpangan yang diperbolehkan.
Pengerjaan praktikum balancing adalah yang paling rumit diantara
yang lain. Karena pengerjaan bagian ini membutuhkan ketelitian lebih dari
praktikan. Banyak kendala yang terjadi saat pengerjaan paktikum, hal itulah
yang kemudian harus dicarikan alternatif oleh praktikan agar balancing dapat
benar-benar dilakukan. Kendala yang terjadi adalah pada saat mencari letak
heavy spot. Dalam hal ini, kesalahan praktikan dalam memeperhatikan intensitas
angka yang muncul dapat menjadi kesalahan fatal dimana keadaan tersebut akan
mengakibatkan titik high spot yang nantinya digunakan sebagai pembalans justru
akan menjadi bagian unbalans tambahan. Untuk itu praktikan harus benar-benar
mampu melihat detail intensitas angka yang paling sering terlihat ketika bagian
angka pada disk saat diberikan cahaya dari lampu yang terhubung pada
rangkaian sistem.
Pada saat melakukan percobaan, praktikan pada awalnya mencari titik
unbalans yang terjadi pada rangkaian sistem dengan menggunakan bantuan
sofware labview yang terhubung pada sistem dan terhubung pula pada power
suplyyang digunakan. Praktikan dapat mengatur nilai frekuensi yang dibutuhkan
dimana dalam praktikum kali ini menggunakan frekuensi sebesar
12Hz.bagian...juga telah terhubung pada software labview, dimana dengan
menggunakan software labview tersebut praktikan dapat melihat berapa besaran
rms yang dicapai ketika nilai frekuensi adalah 12 Hz.
Dengan menghidupkan power suply dengan posisi stroboskop pada
posisi berada pada bagian eksternal, maka kita dapat mengetahui berapa
unbalans yang terjadi pada frekuensi 12Hz dalam satuan rms. Praktikan
melakukan run pada software labview sehinggga nilai rms dapat diketahui.
Berdasarkan standar ISO 1940 yang dipakai, unbalans terjadi pada besaran nilai
rms diatas 2,5. Nilai dibawah angka tersebut telah dianggap balans. Terdapat
beberapa kriteria lainnya pada standar ISO 1940, hal ini menunjukkan bahwa
rangkaian disk tersebut dapat digunakan dalam pengujian untuk semua jenis...
Pada bagian run, akan terlihat grafik yang menunjukkan bagian
unbalans, yang ditunjukkan dengan bagian kurva yang secara sig ifikan terus
mengalami peningkatan. Pada frekuensi 12 Hz, akan didapat nilai rms. Nilai rms
ini kemudian di plot pada grafik yang telah tersedia, untuk kemudian kita
mencari titik massa unbalans yang terjadi. Pada bagian ini diperlukan ketelitian
bagi praktikan untuk menentukan letak titik rms yang didapat. Mengingat skala
grafik yang sangat kecil, juga nilai yang diberikan pada grafik merupakan ...,
tidak diberikan nilai yang lebih spesifik. Untuk bagian ini bisa jadi memberikan

pengaruh besar terhadap eror yang dihasilkan, akibat ketidaktelitian dari
praktikan.
Setelah dilakukan plotting nilai rms, maka akan didapat nilai unbalans
yang terjadi. Dengan nilai unbalans tersebut maka praktikan dapat mencari
massa yang diperlukan untuk membalancing disk tersebut. Massa didapat dengan
membagi niai unbalans terhadap jari-jari yang dipakai.
M = Unbalance
R
Besarnya massa yang diberikan kemudian dijadikan acuan dalam
melakukan pemilihan baut dan mur. Dimana harus dilakukan pemilihan baut dan
mur hingga nilai (massa) yang dihasilkan mendekati massa yang dibutuhkan
untuk proses balancing.
Pada proses pemilihan baut dan mur untuk mencari massa yang
dibutuhkan juga akan memberikan nilai error terhadap proses balancing,
mengingat..timbangan... tidak dalam keadaan baik. ketidakakut=ratan
pada...tersebut sering kali mengakibatkan kesalahan dalam pemilhan baut dan
mur, dimana hasil yang didapat dari penimbangan tersebut berubah-ubah,
termasuk saat praktikan mencoba meindahkan masing masing posisi baut dan
mur di sudut-sudut timbangan. Sehingga sudah dapat dipastkan bahwa salah-satu
sebab kesalahan yang terus menerus terjadi pada proses balancing adalah akibat
ketidakpresisian alat timbang yang digunakan.
Mur dan baut yang didapat kemudian dipasang pada bagian high spot
yang sebelumnya telah dicari. Pemasangan baut dan mur dilakukan dengan
menggunakan kunci agar pemasangan yang dilakukan benar-benar baik,
sehingga ketika ...dalam keadaan berputar tidak akan menyebabkan lepasnya
baut dan mur tersebut. Kemudian diberikan power kembali untuk melihat hasil
dari balancin yang dilakukan.
Pada bagian software labview dilakukan running hingga nilai
frekuensi berada pada 12 Hz. Dengan prosedur yang sama, maka akan didapat
nilai rms. Jika nilai rms dibawah 2,5 maka balancing yang diberikan berhasil.
Perangkat elektronik yang digunakan dalam praktikum ini adalah NI DAQ dan
Labview untuk memperoleh data percobaan.

Setelah itu posisi disk dibalik, disk 1 dipindah ke posisi disk 5.
Kemudian dilakukan kembali prosedur yang sama sehingga disk 1 menjadi
seimbang juga. Saat balancing disk 1 high spot berada di angka 1 disk. Hasil dari
percobaan ini dapat dilihat pada sub-bab data praktikum di atas.
Tambahan :
a) Jelaskan pengertian Unbalance !
Unbalance adalah suatu keadaan dimana sistem beraa dalam kondisi tidak seimbang,
atau tidak stabil. Hal ini disebabkan adanya satu titik atau lebih yang memiliki
karakteristik yang berbeda dengan bagian lainnya.
b) Jelaskan pengertian High spot dan Heavy spot, serta aplikasinya dalam percobaan !
High spot adalah titik dimana massa counterbalance diletakkan sebagai penyeimbang
Heavy spot adalah titik yang menyebabkan terjadinya unbalence.
Aplikasinya dalam percobaan yakni, pada salah satu disk dari 5 disk yang
digunakan terjadi ketidakseimbangan, maka dilakukanlah penyeimbangan terhadap
sistem tersebut. Mulanya dicari terlebih dahulu letak heavy spot dengan prosedur-
prosedur standar yang menjadi acuan, baru kemudian dapat diletakkan beban
penyeimbang di bagian lain, yang berlawanan terhadap titik spot, atau biasa dikenal
dengan high spot.
2.3.6 Kesimpulan
a. Nilai RMS maksimal yang dipakai pada pengujian adalah sebesar 2,5, pada
frekuensi 12 Hz, jika melebihi nilai tersebut maka terjadi unbalans
b. Unbalans dapat dihilangkan dengan menmbahkan beban lain pada posisi yang
berlawanan 1800 (massa counter balance)
c. Benda unbalans (biasanya pada poros) akan berputar tanpa adnya gaya
eksternal yang diberikan.
d. Akan terjadi whirling pada saat pengoperasian jika suatu benda dalam kondisi
unbalans.
DAFTAR PUSTAKA
Farida Asriani. 2009. Instrumentasi slides. “Sensor Mekanik”. Jakarta.
J. L. Meriam, L. G. Kraige, 1997. “Engineering Mechanics, Dynamics”, 2nd Edition, John Wiley & Sons, Inc.
Kristos Macros ([email protected]). 30 Juni 2009. Artikel untuk “The definition of speed, velocity, and acceleration”. Email kepada ([email protected])
Mitsutaka Kanihera. 31 May 2005. Kyowa slides, Miniature Damped Accelerometer Series offers wide range of applications, kyowa electronic instruments Co.Ltd.
R.C.Hibbeler. 1998. Mekanika Teknik 2 “Dinamika”. Prenhallindo, Jakarta.
William W. Seto. 1997. Getaran Mekanis “Mechanical Vibrations” seri Schaum. Erlangga, Jakarta.
Susan Kristoff. 23 Mei 2008. “An introduction to accelerometers”, (online), (http://engineering.suite101.com/article.cfm/an_introduction_to_accelerometers, diakses 29 Juli 2009)

Thomson, William. Theory of Vibration with AppliCation 5th Edition. 1998. Prentice-Hall International
Meriam, J.L, Kraige, L.G. Engineering Mechanics Dynamics Fifth Edition SI Version. 2004. John Wiley and Sons