praktikum getaran mekanis 2015
TRANSCRIPT

MODUL 1
WHIRLING SHAFT
1. TUJUAN PRAKTIKUM
Mengamati fenomena whirling pada poros yang berputar yang kecil-panjang.
Mengetahui nilai putaran kritis dari poros yang berputar.
Membandingkan putaran kritis yang didapat secara praktek dengan putaran kritis yang
didapat secara teori.
2. PERALATAN
Beban silinder alimunium ( 1 buah )
Penggaris 50 cm ( 1 buah )
Satu set whirling shaft apparatus
Power supply
Tachometer
Kunci L
Alat-alat yang digunakan
3. LANDASAN TEORI
Ketika suatu poros berputar, maka akan terjadi fenomena whirling , yaitu fenomena
dimana poros berputar akan mengalami defleksi yang diakibatkan oleh gaya sentrifugal
yang dihasilkan oleh eksentrisitas massa poros. Fenomena ini terlihat sebagai poros yang
berputar pada sumbunya dan pada saat yang sama poros yang berdefleksi juga berputar
relatif mengelilingi sumbu poros.
Fenomena whirling terjadi pada setiap sistem poros, baik yang seimbang maupun tidak.
Pada sistem yang seimbang, fenomena ini dapat disebabkan oleh defleksi statis atau gaya
magnetik yang tidak merata pada mesin – mesin elektrik.
Defleksi awal ini membuat poros berputar dalam keadaan bengkok . Gaya sentrifugal
yang terjadi akan terus membuat defleksi terjadi sampai keadaan seimbang yang berkaitan
dengan kekakuan poros tercapai. Poros yang berputar melewati putaran kritisnya lalu akan
mencapai keadaan setimbang.
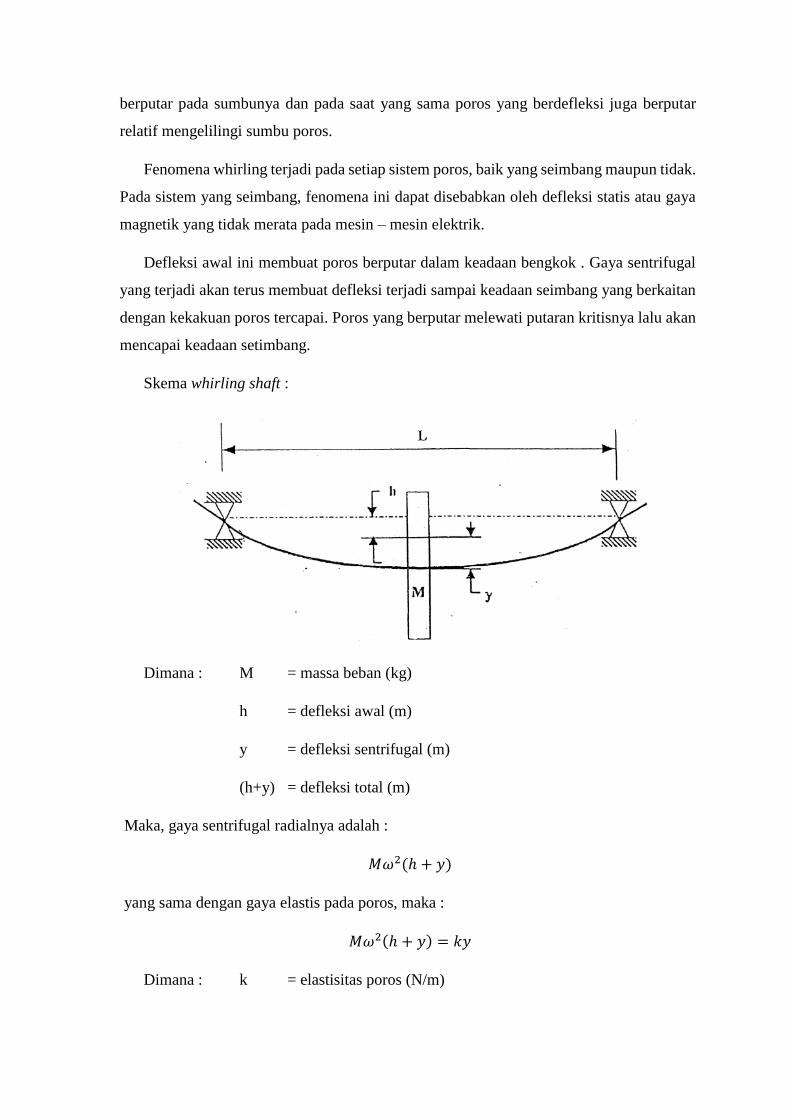
Skema whirling shaft :
Dimana : M = massa beban (kg)
h = defleksi awal (m)
y = defleksi sentrifugal (m)
(h+y) = defleksi total (m)
Maka, gaya sentrifugal radialnya adalah :
𝑀𝜔2(ℎ + 𝑦)
yang sama dengan gaya elastis pada poros, maka :
𝑀𝜔2(ℎ + 𝑦) = 𝑘𝑦
Dimana : k = elastisitas poros (N/m)

Sehingga didapat perbandingan :
𝑦
ℎ=
1
𝑘𝑀𝜔2 − 1
Jika 𝑓𝑛 = √𝑘
𝑀= √
𝑔
𝛿 adalah frekuensi alami getaran poros, maka :
𝜔𝑐 =1
2𝜋√
𝑘
𝑀
Dimana : 𝛿 = defleksi statis dari poros yang mengalami pembebanan W =
Mg pada titik tengahnya (m)
𝜔𝑐 = kecapatan kritis angular dari sistem
Lalu didapat :
𝑦
ℎ=
1
(𝜔𝑐
𝜔 )2
− 1
Jika = 𝜔𝑐 , maka 𝑦
ℎ= ∞, ini merupakan kondisi untuk terjadinya whirling yang besar.
Maka :
𝑁𝑐 =1
2𝜋√
𝑔
𝛿=
0,498
√𝛿
Kondisi pada percobaan :
1) Piringan berada ditengah poros :
𝛿 =𝑀𝑔𝐿3
48𝐸𝐼
Dimana : E = Modulus Young untuk logam poros (Pa)
I = Momen Inersia Area Poros (m4) = 𝜋𝑑4
64
Sehingga didapat persamaan untuk putaran kritis :
𝑁𝑐 = 1,103√𝐸𝐼
𝑀𝐿3
Catatan : Nc dalam rps (rotation per second)
2) Piringan tidak berada ditengah poros :

𝑁𝑐 = 0,276√𝐸𝐼𝐿
𝑀𝑎2𝑏2
Catatan : Nc dalam rps (rotation per second)
4. PROSEDUR PERCOBAAN
Untuk melakukan pratikum whirling shaft langkah kerja yang harus dilakukan adalah
sebagai berikut:
1) Power supply, whirling shaft apparatus,beban, dan tachometer dirangkai
sesuaipetunjuk.
2) Posisi tumpuan shaft diatur sesuai dengan variabel yang diingkinkan. Jarak
tumpuanshaft yang konstan terhadap beban adalah 25.5 cm (jarak a).
3) Posisi tumpuan b diatur sesuai dengan data yang akan diambil. Data yang diambil
untukjarak b terhadap beban 35 cm, 40 cm, 45 cm, 50 cm, dan 55 cm.
4) Motor dinyalakan untuk memutar shaft.
5) Dilakukan pengamatan terhadap getaran shaft.
6) Kecepatan putar shaft yang menghasilkan getaran paling besar dicatat.
7) Motor dimatikan dan posisi b dirubah untuk pengamatan selanjutnya.
5. HASIL DAN EVALUASI
Data Praktikum
Massa jenis alumunium(teoritis) : 2700 kg/m3
Diameter beban (d) : 70 mm = 0.07 m
Ketebalan (t) : 15 mm = 0,015 m
Diameter shaft : 6.1 mm = 0.0061 m
Modulus Young (E) : 9300 MPa
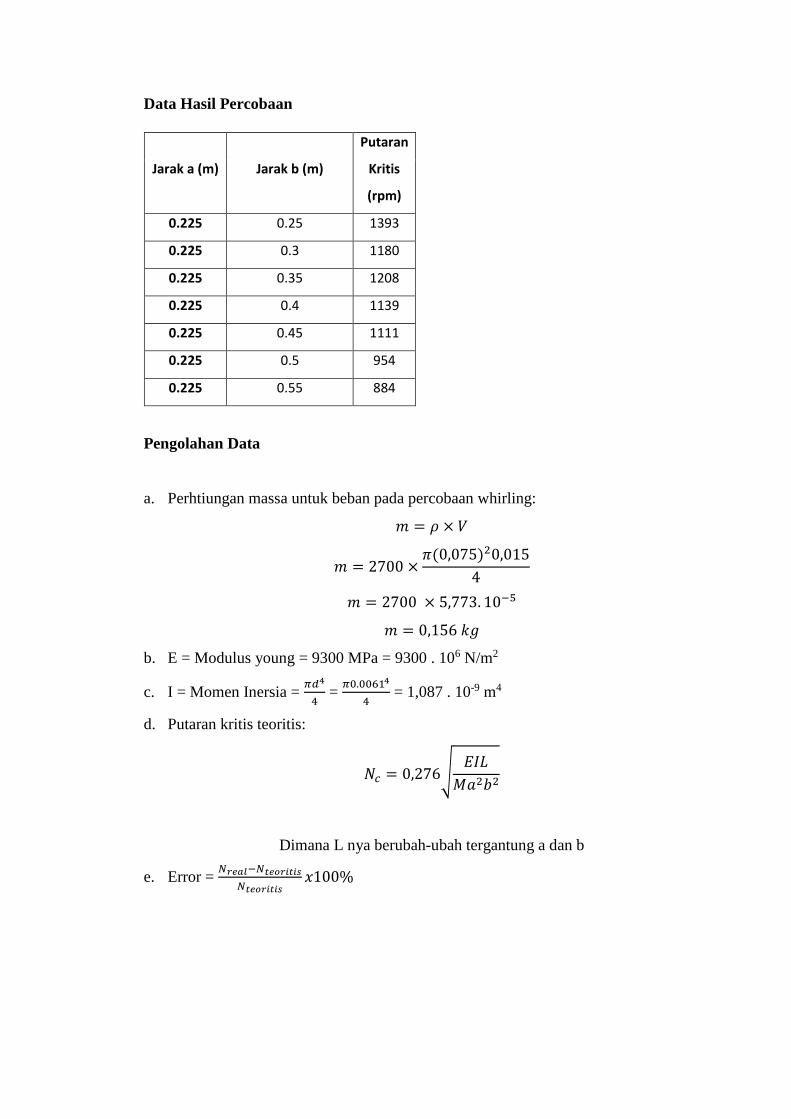
Data Hasil Percobaan
Jarak a (m) Jarak b (m)
Putaran
Kritis
(rpm)
0.225 0.25 1393
0.225 0.3 1180
0.225 0.35 1208
0.225 0.4 1139
0.225 0.45 1111
0.225 0.5 954
0.225 0.55 884
Pengolahan Data
a. Perhtiungan massa untuk beban pada percobaan whirling:
𝑚 = 𝜌 × 𝑉
𝑚 = 2700 ×𝜋(0,075)20,015
4
𝑚 = 2700 × 5,773. 10−5
𝑚 = 0,156 𝑘𝑔
b. E = Modulus young = 9300 MPa = 9300 . 106 N/m2
c. I = Momen Inersia = 𝜋𝑑4
4 =
𝜋0.00614
4 = 1,087 . 10-9 m4
d. Putaran kritis teoritis:
𝑁𝑐 = 0,276√𝐸𝐼𝐿
𝑀𝑎2𝑏2
Dimana L nya berubah-ubah tergantung a dan b
e. Error = 𝑁𝑟𝑒𝑎𝑙−𝑁𝑡𝑒𝑜𝑟𝑖𝑡𝑖𝑠
𝑁𝑡𝑒𝑜𝑟𝑖𝑡𝑖𝑠𝑥100%

Tabel Pengolahan Data
Jarak a (m) Jarak b (m) Putaran Kritis (rpm) Putaran Kritis teoritis(rpm) error (%)
0.225 0.25 139.3 27.22 411.7560617
0.225 0.3 118 23.85 394.7589099
0.225 0.35 120.8 21.39 464.7498831
0.225 0.4 113.9 19.52 483.5040984
0.225 0.45 111.1 18.03 516.1952302
0.225 0.5 95.4 16.82 467.1819263
0.225 0.55 88.4 15.8 459.4936709
Grafik Putaran Kritis vs Jarak B

Grafik Error RPM vs Jarak B
6. ANALISIS
a. Percobaan
Pada modul praktium pertama yang dilakukan oleh praktikan pada rangkaian praktikum
getaran mekanis yakni modul whirling shaft ini, praktikan mengamati fenomena whirling
yang terjadi pada poros dan beban, dimana adanya defleksi yang dirasakan oleh poros
alumunium. Praktikan menggunakan alat whirling shaft apparatus yang terhubung dengan
power supply yang berguna untuk memutar poros yang bersangkutan.
Data umum untuk praktikum modul whirling shaft sudah disediakan oleh senior
assistant praktikan. Data tersebut termasuk massa jenus alumunium, yakni 2700 kg/m3, lalu
tersedia pula ketebalan dari beban, diameter beban yang memang berbentuk seperti silinder,
lalu diameter shaft. Data lengkapnya sudah praktikan letakan di bagian atas laporan ini.
Teknisnya, praktikan akan mengamati pengeruh dari tumpuan terhadap fenomena whirling
yang terjadi, sehingga tumpuan yang ada di modul ini terbagi menjadi dua jenis tumpuan,
yakni tumpuan tetap (fixed, yang selanjutnya disebut sebagai tumpuan A) dan tumpuan
bebas (tumpuan B). Jarak A dimaksudkan untuk 25.5 cm, namun setelah dilakukan
pengukuran langsung, ternyata untuk kelompok kami jaraknya telah berubah menjadi 22.5
cm. Sedangkan tumpuan B yang bertugas menjadi modifier memiliki variasi untuk 25 cm,
30 cm, 35 cm, 40 cm, 45 cm, 50 cm, dan 55 cm.
0
100
200
300
400
500
600
0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 6
ERR
OR
(%
)
JARAK B (M)
ERROR VS JARAK B

Praktikum dimulai dengan mengatur jarak A (yang tidak akan berubah-ubah lagi) yatu
pada jarak 22.5 cm, lalu tumpuan B diatur dimulai pada jarak 25 cm. Masing-masing
tumpuan terkunci dengan bolt bermata L, sehingga dibutuhkan kunci L untuk membongkar
dan memasang kembali rangkaian. Lalu, power supply diaktifkan dan poros alumunium
akan mulai berputar.
Proses pengaturan jarak tumpuan
Praktikan kemudian harus mencari vibrasi terbesar yang terjadi di system tersebut.
Bagian ini seharusnya dilakukan dengan menggunakan vibratometer, namun karena
ketidaktersediaan alat, praktikan diharuskan untuk mengira-ngira vibrasi terbesar yang
terjadi sambil mengatur putaran poros tersebut. Setelah dirasa mendapatkan vibrasi
terbesar, praktikan kemudian mengukur rpm yang dirasakan oleh poros tersebut
menggunakan tachometer, dan mencatat angka yang terbaca pada alat tachometer. Setelah
itu, power supply dinonaktifkan, dan praktikan harus membongkar rangkaian tersebut
sehingga tumpuan B dapat diubah ke jarak-jarak yang bervariasi.
b. Hasil
Setelah rangkaian praktikum tersebut selesai dilakukan, berbekal dengan data rpm yang
sudah praktikan dapatkan, praktikan dapat melakukan pengolahan data. Setalah
mendapatkan juga beberapa data literature, dengan meenggunakan hubungan antara E

(modulus young), I (inersia), praktikan kemudian dapat mendapatkan rpm teoritis. Hasilnya
ternayata terdapat peryimpangan yang cukup besar mencapat 500%.
Tachometer yang digunakan
Analisis yang praktikan coba kemukakan dimulai dari faktor ketelitian dalam mengukur
posisi baik A maupun B, karena penggunan penggaris yang praktikan gunakan, baik
kesalahan dari manusia maupun dari faktor ketelitian dari penggaris tersebut.
Ketidaktersediaan vibratometer juga membuat praktikan sulit untuk menentukan vibrasi
tersebesar yang dialami oleh system, karena saat praktikum dilakukan, kondisi dimana
power supply diaktifkan selalu system sudah berguncang sangat hebat, bahkan osilasinya
dapat membuat rangkaian tersebut berjalan tidak terkendali. Kondisi ini membuat praktikan
menjadi ragu untuk menambah power ke shaft, karena untuk menghindari kerusakan pada
alat-alat di Lab. DTM FTUI. Hal ini selalu terjadi disetiap variasi tumpuan B, sehingga
praktikan tidak memodifikasi lagi power yang masuk ke shaft.
Faktor selanjutnya adalah faktor pengukuran dari tachometer yang digunakan, walaupun
praktikan sudah menggunakan tachometer tersebut dengan benar (yakni dengan satu poros
dengan arah putar shaft) namun praktikan sebelumnya sudah mencoba alat tersebut ke
poros yang sedang diam dan tachometer tersebut malah membaca adanya rotasi yang
terjadi. Mungkin hal ini juga dipengaruhi oleh umur alat tachometer tersebut yang sudah

tua, sehingga tidak terkalibrasi dengan baik. Praktikan juga menghadapi perdebatan dengan
praktikan lainnya untuk masalah pembacaan tachometer yang terus berubah (yang mana
hal ini sebenarnya normal karena tegangan dari PLN yang tidak stabil) sehingga praktikan
tidak dapat menenetukan angka mana yang seharusnya dimasukkan ke dalam pencatatan
data.
c. Grafik
Hasil pengolahan data tersebut juga dapat praktikan olah dalam bentuk grafik sehingga
dapat ditemukan adanya fenomena-fenomena lainnya yang terjadi pada system. Contohnya
pada grafik yang merupakan hubungan antara kecepatan putar dengan jarak b, dapat dlihat
bahwa ssemkain besar jarak B yang diberikan, maka kecepatan putar kritisnya akan
semakin turun. Dapat disimpulkan bahwa hubungan keduanya adalah hubungan
berbanding terbalik. Dapat terlihat juga seharusnya yang terjadi adalah trendnya seharunsya
semakin menurun, namun beberapa kali hasil dari percobaan menunujukan adanya
kenaikan.
7. KESIMPULAN
a. Fenomenda whirling dapat terjadi di poros yang memilii beban tambahan dan berputar
b. Panjang shaft hubungannya berbanding terbalik dengan putaran kritis
c. Semakin panjang shaft maka putaran kritis akan semakin lambat
d. Putaran kritis dapat diketahui dengan hubungan antara putaran kritis dengan panjang
sahft
e. Penempatan titik beban pada shaft menentukan titik putaran kritis pada shaft tersebut.
8. REFERENSI
Thomson, William. Theory of Vibration with Application 5th Edition. 1998. Prentice-
Hall International
Meriam, J.L, Kraige, L.G. Engineering Mechanics Dynamics Fifth Edition SI Version.
2004. John Wiley and Sons

MODUL 2
GETARAN BEBAS DENGAN PEREDAMAN COULOMB
1. TUJUAN PRAKTIKUM
Mengukur massa dari suatu objek melalui periode naturalnya.
Membandingkan massa objek yang didapat melalui periode natural dengan massa yang
dengan menggunakan timbangan.
2. PERALATAN
Untuk melakukan praktikum mengenai getaran bebas dengan peredaman coulomb
inidiperlukan alat sebagai berikut:
Rangkaian pegas
Beban
Penggaris
Stopwatch
3. LANDASAN TEORI
Bila objek bergerak ke kanan dan dilepas, maka gaya yang bekerja pada sistem adalah
gaya pegas = 𝑘𝑒𝑞𝑥 dan gaya gesekan = 𝜇𝑁
Dalam persamaan gerak :
∑ 𝐹 = 𝑚𝑎
−𝑘𝑒𝑞𝑥 + 𝜇𝑚𝑔 = 𝑚�̈�
Dengan penyelesaian :
𝑥 = 𝐴 cos 𝜔𝑛𝑡 + 𝐵 sin 𝜔𝑛𝑡 + 𝜇𝑚𝑔

Jika t = 0, maka :
𝑥 = 𝑥0 , maka : 𝑥0 = 𝐴 +𝜇𝑚𝑔
𝑘𝑒𝑞
𝐴 = 𝑥0 −𝜇𝑚𝑔
𝑘𝑒𝑞
�̇� = 0, maka : 𝜔𝑛𝐵 = 0
Karena 𝜔𝑛 tidak selalu 0, maka B = 0
Maka penyelesaiannya berbentuk :
𝑥 = (𝑥0 −𝜇𝑚𝑔
𝑘𝑒𝑞) cos 𝜔𝑛𝑡 +
𝜇𝑚𝑔
𝑘𝑒𝑞
Dari persamaan diatas dapat diketahui bahwa peredaman dalam sistem terjadi karena
amplitudo gerakan berkurang secara kontinu. Setiap setengah siklus, amplitudo getaran
berkurang sebesar 2 (𝜇𝑚𝑔
𝑘𝑒𝑞).
Mencari frekuensi natural :
Dari persamaan gerak :
𝑚�̈� + 𝑘𝑒𝑞 (𝑥 −𝜇𝑚𝑔
𝑘𝑒𝑞) = 0
Dengan :
𝑥′ = 𝑥 −𝜇𝑚𝑔
𝑘𝑒𝑞
�̇�′ = �̇�
�̈�′ = �̈�
Maka :
𝑚�̈�′ + 𝑘𝑒𝑞𝑥′ = 0
�̈�′ +𝑘𝑒𝑞
𝑚𝑥′ = 0
Sehingga :

𝜔𝑛 = √𝑘𝑒𝑞
𝑚
Dalam frekuensi :
𝑓𝑛 =1
2𝜋√
𝑘𝑒𝑞
𝑚
Dalam perioda :
𝜏𝑛 = 2𝜋√𝑚
𝑘𝑒𝑞
Dalam percobaan, akan dilakukan perbandingan antara massa objek yang diukur dengan
timbangan dengan massa objek yang didapat dengan menggunakan rumus :
𝑚 =𝜏𝑛
2𝑘𝑒𝑞
4𝜋2
Setelah itu, persentase kesalahan akan dihitung dengan menggunakan rumus :
𝑒𝑟𝑟𝑜𝑟 =|𝑚 − 𝑚𝑡𝑖𝑚𝑏𝑎𝑛𝑔|
𝑚𝑡𝑖𝑚𝑏𝑎𝑛𝑔. 100%
4. PROSEDUR PERCOBAAN
Untuk melakukan pratikum getaran bebas dengan peredaman coulomb langkah kerja
yang harus dilakukan adalah sebagai berikut:
1) Rangkaian pegas disiapkan untuk dilakukan percobaan.
2) Beban yang akan diujikan diukur massanya terlebih dahulu. Pada percobaan ini
digunakan beban berat badan praktikan.
3) Beban diletakkan pada system pegas.
4) Pegas ditarik dari keadaan setimbang hingga 7 cm.
5) Beban dilepaskan dan dihitung berapa banyak beban berosilasi dan dihitung
waktu osilasinya.
6) Percobaan diulangi untuk simpangan awal 8, 9,10, 11 cm.
7) Data yang diperoleh dicatat.

5. HASIL DAN EVALUASI
Pada percobaan kedua dari rangkaian praktikum praktikan kemudian mendapatakan
data yang berkaitan dengan n osilasi dan waktu dari osilasi tersebut. Dan sesuai dengan
data juga diketahui bahwa setiap pegas memiliki konstanta kekakuan 500 N/m, sehingga
ekuivalensi nya adalah 2000 N/m.
Bangku untuk percobaan coulomb
Gambar system yang disederhanakan
Massa dari salah satu kolega praktikan adalah 51 kg kemudian massa tersebut
menentukan osilasi yang terjadi pada system. Dengan jumlah dan waktu dari osilasi pada
system, maka dapat diketahui periode dari getaran system. Percobannya dilakukan

sebanyak tiga kali untuk setiap variasi simpangan. Sehingga praktikan masing-masing
memiliki tiga data periode untuk simpangan yang berbeda pula.
Untuk mencari massa teoritis dan data-data pendukung lainnya menggunakan
persamaan berikut:
𝜏𝑛 =𝑡
𝑛 (1)
𝑚 =𝜏𝑛
2𝑘𝑒𝑞
4𝜋2 (2)
𝑒𝑟𝑟𝑜𝑟 =|𝑚 − 𝑚𝑡𝑖𝑚𝑏𝑎𝑛𝑔|
𝑚𝑡𝑖𝑚𝑏𝑎𝑛𝑔𝑥100% (3)
τn = Periode Getaran
n = Jumlah Getaran
t = Waktu Getaran
k = Kekakuan Getaran
m = Massa Teoritis
mtimbang = Massa Beban Aktual
Dapat disimpulkan dari persamaan-persamaan diatas, maka jumlah getaran dan waktu
getaran (periode) dapat diperoleh menggunakan persamaan 1. Sedangkan nilai kekakuan
system pegas dan periode reratanya dapat diperoleh juga massa teoritis menggunakan
persamaan 2. Sedangkan kesalahan (error) dapat diperoleh menggunakan selisih massa
aktual dan massa teoritis dalam bentuk persen.
Data Praktikum
Keq = 2000 N/m
Massa aktual = 51 kg
Xo (m) n t (s)
1 2 3 1 2 3
0.07 2.5 2.25 2.25 2.8 2.9 3.6
0.08 2.25 2.25 2.25 3.6 3.3 3.2
0.09 2.25 2.25 2.25 3.7 3.6 3.7
0.1 2.75 2.75 2.75 3.3 3.7 4.1
0.11 2.75 2.75 2.75 4 3.9 4.1

Kemudian dilakukan perhitungan yang digunaan untuk verifikasi antara periode dan
massa (aktual dan teoritis). Digunakan persamaan (1) dan (2), maka table data menjadi
seperti berikut:
Xo (m)
n t (s) tn tn m error
1 2 3 1 2 3 1 2 3 rata-
rata teoritis massa (%)
0.07 2.5 2.25 2.25 2.8 2.9 3.6 1.12 1.29 1.6 1.3363 90.46358 77.3795632
0.08 2.25 2.25 2.25 3.6 3.3 3.2 1.6 1.47 1.42 1.4963 113.4236 122.399217
0.09 2.25 2.25 2.25 3.7 3.6 3.7 1.644 1.6 1.64 1.62963 134.5383 163.800659
0.1 2.75 2.75 2.75 3.3 3.7 4.1 1.2 1.35 1.49 1.34545 91.7078 79.8192211
0.11 2.75 2.75 2.75 4 3.9 4.1 1.455 1.42 1.49 1.45455 107.1822 110.161252
Grafik Error Massa vs Simpangan
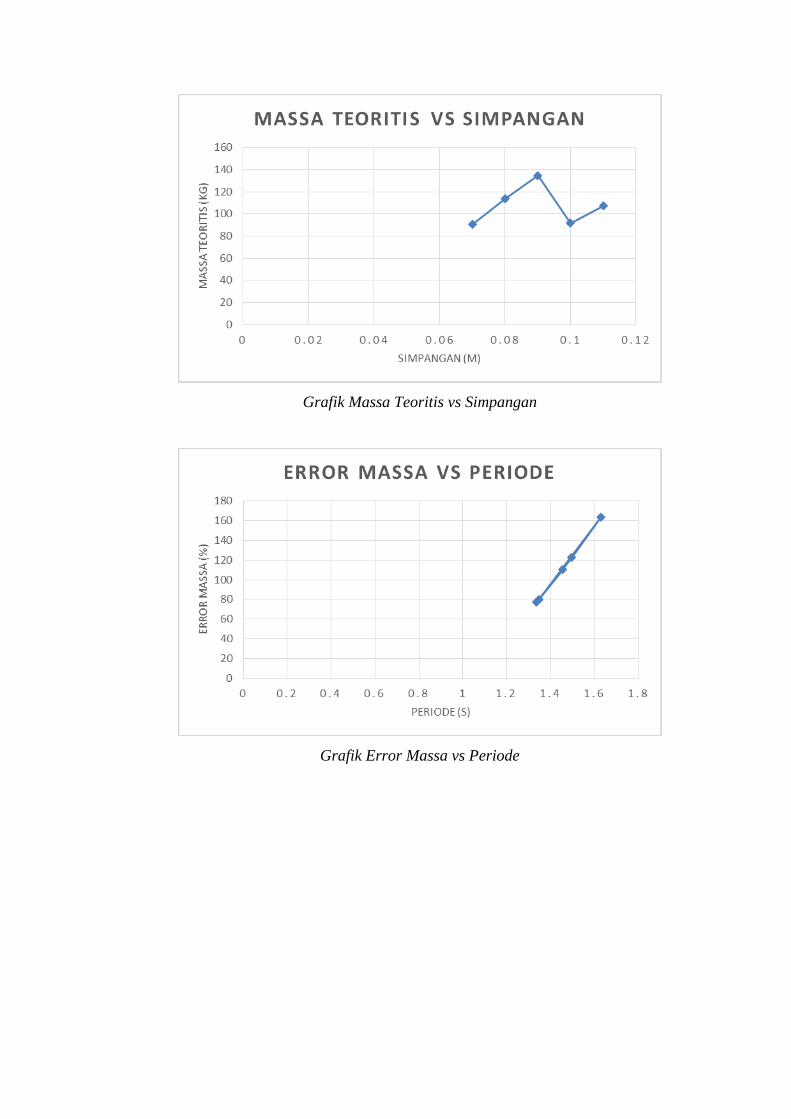
Grafik Massa Teoritis vs Simpangan
Grafik Error Massa vs Periode

Grafik Periode vs Simpangan
6. ANALISIS
a. Perobaan
Pada modul kedua yakni modul getaran mekanis dengan peredam coulomb, yang mana
merupakan praktikum yang melibatkan alat di Lab. DTM FTUI yang berupa bangku buatan
yang memiliki 4 buah pegas, yang terhubung dengan bearing di slide bangku tersebut, jadi
dengan mengandalkan berat badan salah satu kolega praktikan, praktikan dapat mengamati
fenomena peredaman coulomb yang terjadi pada system.
Test Subject di atas alat

Teknis pengerjaan yakni, test subject (M. Priyo) yang memiliki berat badan 51 kg, duduk
di bangku tersebut, lalu praktikan lainnya berada di posisi masing-masing. Dibutuhkan
praktikan untuk memegang penggaris guna mengukur simpangan awal yang diberikan pada
system. Perlu juga praktikan untuk menarik bangku tersebut ke posisi simpangan awalnya,
sekaligus timer untuk mengukur lamanya system tersebut untuk kembali ke posisi awalnya.
Percobaan dilakukan tiga kali untuk setiap simpangan yang berbeda, yaitu untuk 7 cm, 8
cm, 9 cm, 10 cm, dan 11 cm.
b. Hasil
Dari hasil perobaan yang terlihat, dapat diperhatikan bahwa terdapat perbedaan yang cukup
signifikan antara massa aktual dari M. Priyo (51 kg) yang dibandingkan dengan massa yang
diperoleh dengan massa teoritis. Error yang dihasilkan bahkan mencapai angka lebih dari
100%. Analisis praktikan adalah, bahwa system yang terukur pada hasil hitung massa
teoritis adalah massa total, termasuk massa priyo + massa dari platform bangku tersebut.
Yang mana berat dari platform tersebut tidak praktikan ketahui secara pasti, karena tidak
dilakukan penimbangan massanya terlebih dahulu.
Disamping itu praktikan dan kolega sekelompok sempat berdebat mengenai definisi satu
siklus getaran yang terjadi pada system, karena cukup sulit untuk diperhatikan secara
langsung, karena adanya damper yang semakin memperkecil siklus setiap satuan waktunya.
Alhasil, nilai n yang tertera pada data hasil percobaan praktikan merupakan hasil yang
belum pasti. Dan praktikan juga menemukan adanya faktor pegas dan lubricants yang
memengaruhi hasil data. Pegas-pegas tersebut dirasa sudah tidak bisa bekerja secara
optimal, dan lubricant yang dalam hal ini oli/gemuk sudah sedikit ditemukan, sehingga
system bangku tidak dapat kembali ke posisi netral (titik 0) yang tertera pada penggaris
praktikan, jadi lagi-lagi posisi 0 selalu berubah setiap kali percobaan yang berbeda.
Tingkat ketelitian dari penggaris juga dirasa memiliki faktor yang berpengaruh, namun
tidak seberapa dibanding kesalahan yang lainnya, namun praktikan mengalami kesulitan
untuk menjaga agar penggaris tersebut juga tetap selevel (lurus) dengan arah gerak
platform, demi memperakurat hasil pengukuran. Tingkat ketilitian dari stopwatch juga
memiliki sedikir pengaruh kepada hasil, dimana stopwatch yang praktikan menggunakan
memiliki ketilitan 0.1.
Kesalahan yang mungkin terjadi adalah faktor kesalahan manusia yang tidak dapat
terelakkan dengan masalah koordinasi antar sesama anggota. Dimana dibutuhkan kordinasi
yang cermat antara pengamat osilasi dengan timer, serta ketilitian pencatat data. Postur
duduk dari M. Priyo juga turut ambil bagian, karena dibutuhkan posisi yang terus sama dari
percobaan I sampai percobaan terakhir. Tanpa adanya konsitensi dari hal ini juga dapat
mempengaruhi pengukuran osilasi yang teramati serta otomatis mempengaruhi hasil akhir
massa teoritis yang praktikan hitung.
c. Grafik
Dapat diamati dari hasil keempat tracing grafik yang praktikan lakukan, yakni Error massa
vs Simpangan, Massa teoritis vs Simpangan, Error massa vs Periode, dan Periode vs
Simpangan. Pada grafik pertama, hubungan antara persen kesalahan massa dengan
simpangan dapat dilihat trendnya secara garis besar adalah naik seiring bertambahnya
simpangan, hanya menurun di titik 10 cm. Hal ini dapat terjadi karena posisi titik 10 cm
yang lebih bisa dilihat secara akurat pada penggaris praktikan, namun lagi-lagi ini semua
bisa terjadi karena analisis hasil yang sudah praktikan sebutkan sebelumnya.
Pada grafik kedua, hubungan anatara massa teoritis dengan simpangan trendnya kurang
lebih bisa dikatakan sama dengan trend grafik pertama. Karena memang terlihat bahwa
hubungan antara massa teoritis dengan error massa berbanding lurus.
Pada grafik ketiga, hubungan antara persen kesalahan massa dengan periode terlihat lebih
linier dibanding grafik-grafik lainnya. Sedangkan grafik keempat yakni hubungan antara
periode dengan simpangan trendnya kurang lebih sama dengan grafik pertama dan kedua.
7. KESIMPULAN
a. Hubungan antara simpangan, dan periode dapat digunakan untuk mengukur massa.
b. Adanya kesalahan pengukuran yang besar untuk massa teoritis dengan massa
aktualnya.
c. Hubungan simpangan dengan frekuensi natural dari system adalah berbanding lurus.
8. REFERENSI
Thomson, William. Theory of Vibration with Application 5th Edition. 1998. Prentice-
Hall International
Meriam, J.L, Kraige, L.G. Engineering Mechanics Dynamics Fifth Edition SI Version.
2004. John Wiley and Sons.
Modul Praktikum Mesin Balancing Multiplane, Mata Kuliah Getaran Mekanis.
Departemen Teknik Mesin, Fakultas Teknik, Universitas Indonesia.

MODUL 3
BALANCING
1. TUJUAN PRAKTIKUM
Mengetahui ciri-ciri benda tidak balance.
Melakukan balancing dengan memberikan massa counter balance.
2. DASAR TEORI
Sebuah benda unbalance merupakan benda yang memiliki komposisi gaya-gaya inersia
dan momen-momen yang tidak seimbang. Balancing merupakan sebuah teknik untuk
menemukan dan mengkoreksi gaya-gaya yang tidak seimbang diimbangi dengan suatu
gaya inersia atau momen yang melawan gaya unbalance.
Unbalance pada suatu shaft merupakan situasi dimana titik tengah gravitasi putaran
shaft tidak sama dengan titiktengah geometris dari shaft. Besar unbalance tergantung dari
gaya sentrifugal yang terjadi saat operasi.
𝐹 = 𝐼 . 𝜔2
Dimana; F = Gaya Reaksi (N)
I = Unbalance (kg,m)
ω = Kecepatan Putar Angular (rad/s)
Unbalance dapat dibayangkan sebagai berat yang dipasang secara eksentrik di badan
yang berputar. Jenis-jenis unbalance yaitu static unbalance, couple unbalance, quasistatic
unbalance, dan dynamic unbalance.

Jenis-jenis unbalance pada sistem
Teknik balancing dapat dibagi dalam 2 jenis yaitu berdasarkan posisi dan besar
unbalance. Pada balancing berdasarkan posisi, unbalance didapatkan dari beda sudut fase
pada sudut referensi. Sedangkan untuk besar unbalance, dideteksi dari amplitude getaran
yang terbaca dan dikonversikan langsung menjadi (m.r). Pembacaan besar unbalance dapat
berdasarkan perpindahan getaran, kecepatan getaran, dan percepatan getaran. Namun pada
mesin balancing yang digunakan pada praktikum kali ini, digunakan mesin pembacaan
berdasarkan kecepatan getaran.
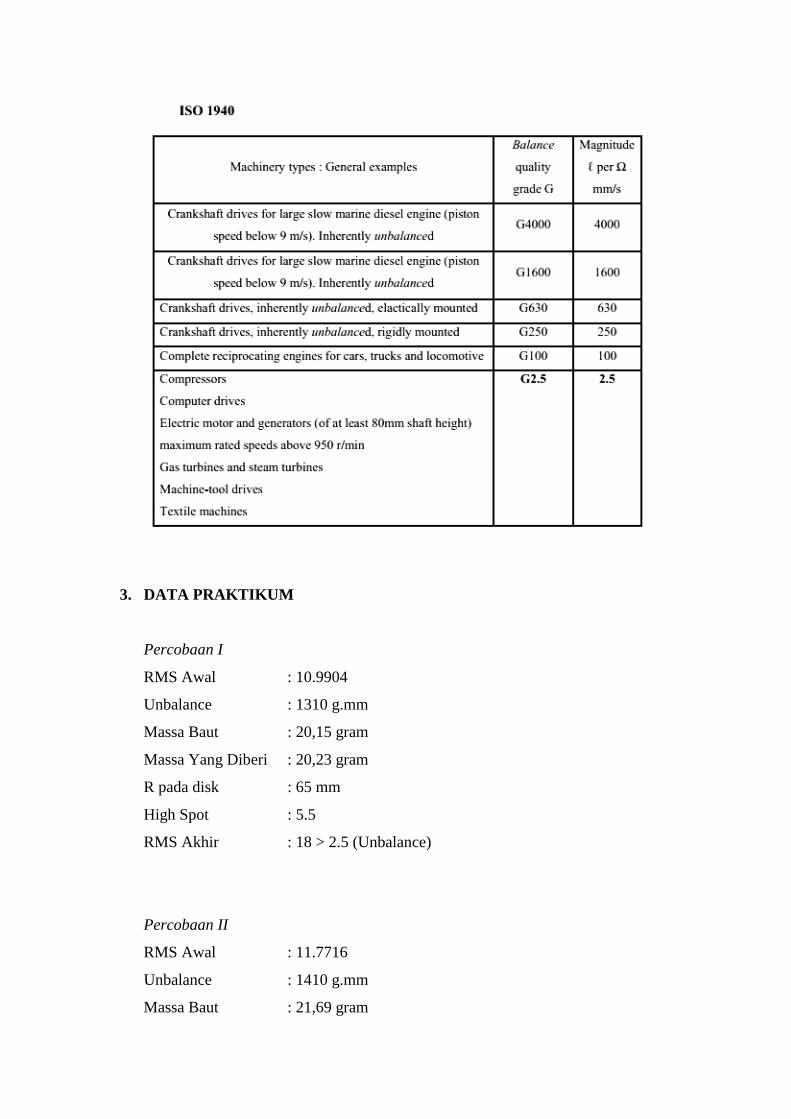
3. DATA PRAKTIKUM
Percobaan I
RMS Awal : 10.9904
Unbalance : 1310 g.mm
Massa Baut : 20,15 gram
Massa Yang Diberi : 20,23 gram
R pada disk : 65 mm
High Spot : 5.5
RMS Akhir : 18 > 2.5 (Unbalance)
Percobaan II
RMS Awal : 11.7716
Unbalance : 1410 g.mm
Massa Baut : 21,69 gram
Massa Yang Diberi : 21,71 gram
R pada disk : 65 mm
High Spot : 8
RMS Akhir : 38 > 2.5 (Unbalance)
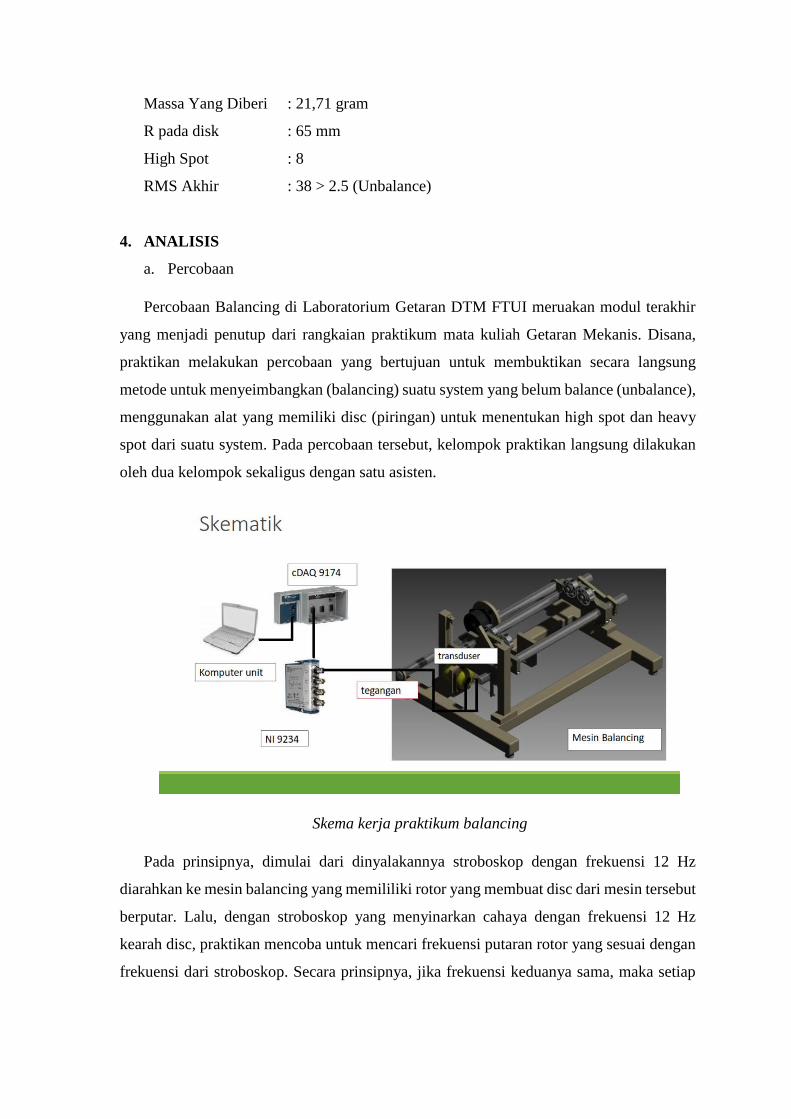
4. ANALISIS
a. Percobaan
Percobaan Balancing di Laboratorium Getaran DTM FTUI meruakan modul terakhir
yang menjadi penutup dari rangkaian praktikum mata kuliah Getaran Mekanis. Disana,
praktikan melakukan percobaan yang bertujuan untuk membuktikan secara langsung
metode untuk menyeimbangkan (balancing) suatu system yang belum balance (unbalance),
menggunakan alat yang memiliki disc (piringan) untuk menentukan high spot dan heavy
spot dari suatu system. Pada percobaan tersebut, kelompok praktikan langsung dilakukan
oleh dua kelompok sekaligus dengan satu asisten.
Skema kerja praktikum balancing
Pada prinsipnya, dimulai dari dinyalakannya stroboskop dengan frekuensi 12 Hz
diarahkan ke mesin balancing yang memililiki rotor yang membuat disc dari mesin tersebut
berputar. Lalu, dengan stroboskop yang menyinarkan cahaya dengan frekuensi 12 Hz
kearah disc, praktikan mencoba untuk mencari frekuensi putaran rotor yang sesuai dengan
frekuensi dari stroboskop. Secara prinsipnya, jika frekuensi keduanya sama, maka setiap

angka di disc akan terlihat “diam”. Oleh karena itu, praktikan mencoba untuk
menyesuaikan frekuensi dari rotor agar RMS dari dari system dapat terbaca.
Skema pembacaan oleh LABVIEW
Setelah dirasa cocok, mode internal pada mesin balancing diubah ke mode eksternal
sehingga dengan menggunakan sambungan alat NI cDAQ 9174, RMS dari system dapat
terbaca langusung di layar komputer. Hasil dari pembacaan ini adalah langsung dalam
bentuk (m.e) sehingga RMS yang terbaca harus disesuaikan menggunakan grafik
unbalance.

Alat NI cDAQ
Mesin Balancing

Mesin motor dan stroboskop
LABVIEW untuk mengamati RMS

Grafik balancing (Amplitude vs Unbalance)
Setelah dicocokkan ke grafik tersebut, praktikan langsung dapat mengetahui massa
counter-balance yang harus diaplikasikan ke system. Dengan kisaran angka r dari 45 mm
– 65 mm, praktikan memilih untuk menggunakan r = 65 mm.
Namun, setelah massa counter balance diaplikasikan ke system lalu rms dari system
diukur kembali, praktikan tidak mendapatkan rms yang sesuai standard untuk yang
dikatakan sebagai rms yang balance, yakni <2.5. Yang terjadi bahkan massa yang
dimaksudkan sebagai counter balance malah membuat system semakin tidak balance,
bahkan lebih besar dari sebelumnya.
b. Hasil
Analisis yang coba praktikan pecahkan adalah bermula dari alat-alat yang berada di
laboraturium diharuskan tersambung ke tegangan oleh PLN. Tegangan yang tidak konstan
selalu sama membuat kecepatan putaran sudut dari rotor dan frekuensi dari stroboskop pun
tidak selalu sama. Yang mana, jika sama akan sangat memudahkan praktikan untuk

menemukan kecepatan sudut untuk rotor yang tepat untuk menyesuaikan dengan frekuensi
stroboskopnya. Pada kenyatannya, praktikan harus melihat dengan cermat fenomena
tersebut dengan putarannya yang selalu berubah-ubah, dan tidak bisa lebih lama dari 10s.
Lalu titik high-heavy spot yang terbaca juga tidak dapat ditentukan dengan cermat, karena
tingkat ketilitiannya yang 1 digit. Jadi praktikan melakukan perkiraan secara kasar
mengenai titik tersebut. Selanjutnya, jika titik tersebut sudah ditemukan, praktikan harus
mematikan system (rotor dan stroboskop) untuk mengubah mode mesin dari internal ke
eksternal, agar dapat terbaca oleh komputer. Lagi-lagi akibat tegangan listrik PLN,
praktikan tidak dapat memastikan apakah hasil temuan sebelumnya akan sama setelah di
restart. Di LABVIEW pada layar komputer juga RMS yang terlihat tidak selalu sama
melainkan terus beranjak naik, sehingga praktikan tidak dapat menentukan RMS yang
cocok untuk dijadikan patokan secara pasti, melainkan hanya dalam bentuk interval.
Lalu faktor kesalahan berikutnya adalah saat melakukan tracing di grafik balancing.
Angka pasti di grafik tidak mutlak karena hasil print yang praktikan lakukan tidak sebangun
(rasio-nya tidak sama). Sehingga praktikan tidak yakin apakah massa hasil hitung juga
merupakan massa yang sesungguhnya dibutuhkan. Lalu, setelah nominal massa
didapatkan, pratikan harus mencari massa tersebut dengan menggunakan bolt, ring, dan
nut. Praktikan juga tidak dapat menemukan angka yang benar-benar precise karena
metodenya yang menggunakan trial dan error. Hasil yang kami dapatkan adalah system
semakin tidak balance, meski percobaan sudah kami lakukan sebanyak dua kali.
5. KESIMPULAN
a. Standard 2.5 diciptakan karena unbalance tidak dapat dilakukan secara sempurna,
disamping itu juga sudah sulit dirasakan oleh manusia.
b. Terdapat rangkaian kesalahan yang menyebabkan tidak terjadinya posisi balance
pada system (<2.5) walau sudah dilakukan 2 kali percobaan.
c. Counter balance pada prinsipnya adalah memberikan massa yang sesuai dengan
posisi yang berlawanan pada system.
6. REFERENSI
Thomson, William. Theory of Vibration with Application 5th Edition. 1998. Prentice-
Hall International

Meriam, J.L, Kraige, L.G. Engineering Mechanics Dynamics Fifth Edition SI Version.
2004. John Wiley and Sons.
Modul Praktikum Mesin Balancing Multiplane, Mata Kuliah Getaran Mekanis.
Departemen Teknik Mesin, Fakultas Teknik, Universitas Indonesia.

LAPORAN PRAKTIKUM GETARAN MEKANIS
DISUSUN OLEH
RIZA FARRASH KARIM (1306368806)
KELOMPOK 3
DOSEN : DR. IR. WAHYU NIRBITO, MSME
ASISTEN : AHMAD SYIHAN
LINA SYARAVINA
ANGGITA DWI LIESTYOSIWI
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS INDONESIA
DEPOK
2015