persamaan-l dan h.doc
DESCRIPTION
persamaan lagrang dan henryTRANSCRIPT
Mekanika Lagrangian
Sebuah pendekatan yang lebih efektif digunakan dalam mencari persamaan gerak sistem yang pertama dikembangkan oleh matematikawan Perancis Joseph Louis Lagrange yang disebut formalisme Lagrange.
Perbedaaan keduanya terletak pada koordinat umum yang dipakai.
Formalisme Lagrange menggunakan posisi dan kecepatan sebagai koordinat rampatan yang menghasilkan persamaan linier orde-dua.
Formalisme Hamilton posisi dan momentum digunakan untuk koordinat rampatan yang menghasilkan persamaan diferensial orde-satu.
KOORDINAT RAMPATAN (UMUM)
2
Posisi sebuah partikel dalam l ruang dapat dinyatakan dengan menggunakan tiga jenis koordinat;dapat berupa koordinat Kartesian, koordinat bola atau koordinat silinder.
Jika sistem yang ditinjau mengandung N partikel, maka diperlukan paling kurang 3N koordinat untuk menyatakan posisi semua partikel. Koordinat-koordinat tersebut dinyatakan dengan
q1, q2, …..qn (1)disebut koordinat rampatan (generalized coordinates). Istilah rampat diambil dari kata merampat dan papan.
Koordinat qk dapat saja berupa sudut atau jarak. Tiap koordinat dapat berubah secara bebas terhadap lainnya; sistem tersebut dinamakan holonomic. Jumlah koordinat n dalam hal ini disebut dengan derajat kebebasan sistem.
3
Dalam sistem yang nonholonomic, masing-masing koordinat tidak dapat berubah secara bebas satu sama lain, yang berarti bahwa banyaknya derajat kebebasan adalah lebih kecil dari jumlah minimum koordinat yang diperlukan untuk menyatakan konfigurasi sistem.
Dalam hal ini, koordinat-koordinat tersebut tidak dapat berubah semuanya secara bebas. Jika bola tersebut menggelinding, paling kurang dua koordinat mesti berubah. Dalam pembahasan selanjutnya kita akan membatasi diri pada sistem holonomic.
Untuk partikel tunggal, fungsi koordinat rampatan lebih mudah diungkapkan dengan menggunakan koordinat Kartesius:
x = x(q)
(satu derajat kebebasan - gerak pada sebuah kurva).
x = x(q1,q2)
(dua derajat kebebasan - gerak pada sebuah permukaan).
4
x = x(q1,q2,q3) y = y(q1,q2,q3)
z = z(q1,q2,q3)
(tiga derajat kebebasan - gerak dalam sebuah ruang)
Misalkan q berubah dari harga awal (q1,q2, ….) menuju harga (q1+q1,q2+q1 ..). Perubahan koordinat Kartesius yang bersesuaian adalah :
(2)
(3)
5
(4)
Turunan parsial x/q1 dan seterusnya adalah fungsi dari q. Sebagai contoh, misalkan sebuah partikel bergerak dalam bidang. Misalkan kita memilih koordinat kutub untuk menyatakan konfigurasi sistem, maka dalam hal ini :
q1 = r q2 = (5)
Selanjutnya :
x = x(r,) = r cos y = y(r,) = r sin (6)
6

dan
= cos r - r sin (7)
= sin r + r cos (8)
Sekarang perhatikan sebuah sistem yang mengandung sejumlah n partikel; dalam hal ini mengandung n derajat kebebasan serta koordinat rampatannya dinyatakan dengan :
q1, q2, …..qn (9)
Selanjutnya perubahan konfigurasi dari (q1, q2, …..qn) ke konfigurasi di dekatnya (q1+q1, q2+q2, …qn+qn), menyatakan perpindahan partikel ke i dari titik (xi,yi,zi) ke titik di dekatnya (xi+xi,yi+yi,zi+zi) dimana:
7

(10)
(11)
(12)
Persamaan (10–12) menunjukkan bahwa turunan parsialnya merupakan fungsi q. Selanjutnya kita akan mengambil indeks i untuk menyatakan koordinat rectangular, dan indeks k untuk menyatakan koordinat rampatan. Simbol xi kita pakai untuk menyatakan sembarang koordinat rectangular. Sistem yang mengandung N partikel, i dapat berharga antara 1 dan 3N.
8

GAYA RAMPATAN
Jika sebuah partikel mengalami pergeseran sejauh r dibawah pengaruh sebuah gaya aksi F, gaya yang bekerja padanya dinyatakan dengan
(13)
Dalam bentuk yang lebih sederhana dapat dinyatakan dengan
(14)
9

Tampak bahwa persamaan di atas tidak hanya berlaku untuk partikel tunggal, tetapi juga untuk sistem banyak partikel. Untuk satu partikel, harga i adalah dari 1 sampai 3. Untuk N partikel, harga i adalah dari 1 sampai 3N.
Jika pertambahan xi dinyatakan dalam koordinat rampatan, maka diperoleh
(15)
10

Persamaan di atas juga dapat ditulis
(16)
dimana :
(17)
Besaran Qk yang didefinisikan menurut persamaan di atas disebut dengan gaya rampatan. Oleh karena perkalian Qkqk memiliki dimensi kerja/usaha, maka dimensi Qk adalah gaya jika qk menyatakan jarak, dan dimensi Qk adalah torka, jika qk menyatakan sudut.
11
GAYA RAMPATAN UNTUK SISTEM KONSERVATIF
Jika sebuah gaya bekerja pada sebuah partikel dalam sebuah medan gaya konservatif, besarnya gaya tersebut dinyatakan oleh persamaan
(18)
dimana V menyatakan sebuah fungsi energi potensial. Oleh karena itu perumusan gaya rampatan dapat dinyatakan
(19)
12
Suku yang berada dalam tanda kurung tak lain adalah turunan parsial fungsi V terhadap qk. Oleh karena itu
(20)
Misalkan, kita menggunakan koordinat kutub, q1 = r ; q2 = , maka gaya rampatan dapat dinyatakan dengan Qr = -V/r ; Q = -V/. Jika V merupakan fungsi r saja (dalam kasus gaya sentral), maka Q = 0.
13
PERSAMAAN LAGRANGE
Untuk mencari persamaan diferensial gerak sebuah benda yang dinyatakan dalam koordinat rampatan, kita dapat memulai dengan persamaan berikut:
(21) dan selanjutnya kita akan mencoba menyatakan persamaan tersebut dalam q. Pendekatan pertama yang akan kita pakai adalah dari persamaan energi. Kita akan menghitung energi kinetik T dalam bentuk koordinat Kartesian dan selanjutnya kita akan nyatakan dalam koordinat rampatan dan turunannya terhadap waktu. Energi kinetik T
14

dari sebuah sistem yang mengandung N partikel dapat dinyatakan dengan
(22)
atau dalam bentuk yang lebih ringkas ditulis sebagai berikut
(23)
Mari kita mencoba menyatakan hubungan antara koordinat x dan q yang juga mengandung waktu t secara eksplisit. Kita dapat misalkan
(24)
15

dan selanjutnya
(25)
Kita dapat melihat bahwa energi kinetik sebagai fungsi koordinat rampatan, turunannya terhadap waktu, atau mungkin dalam waktu. Dalam banyak hal, waktu t tidak secara eksplisit terkait hubungan antara xi dan qk, sehingga xi/t = 0. Jelaslah bahwa energi kinetik T merupakan fungsi kuadrat yang homogen dari kecepatan rampatan .
Dari persamaan (26)
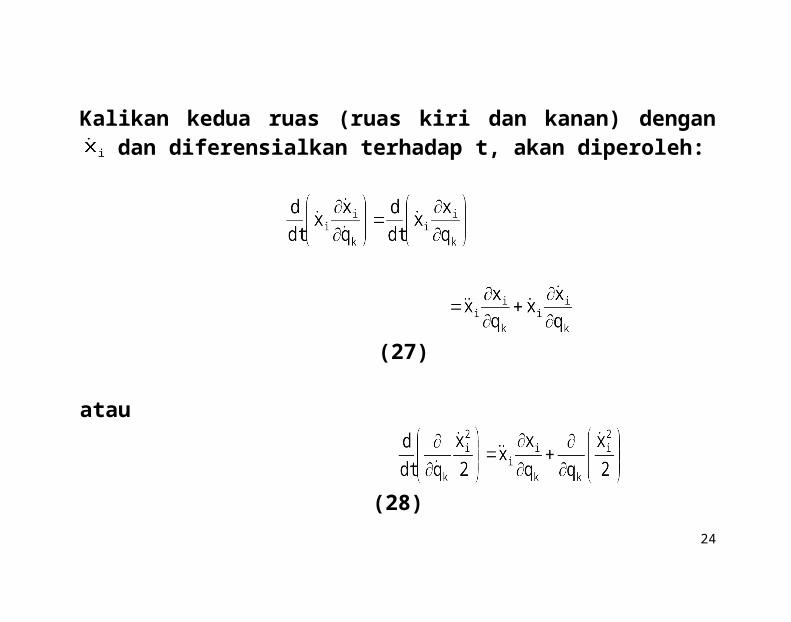
Kalikan kedua ruas (ruas kiri dan kanan) dengan dan diferensialkan terhadap t, akan diperoleh:
16

(27)
atau
(28)
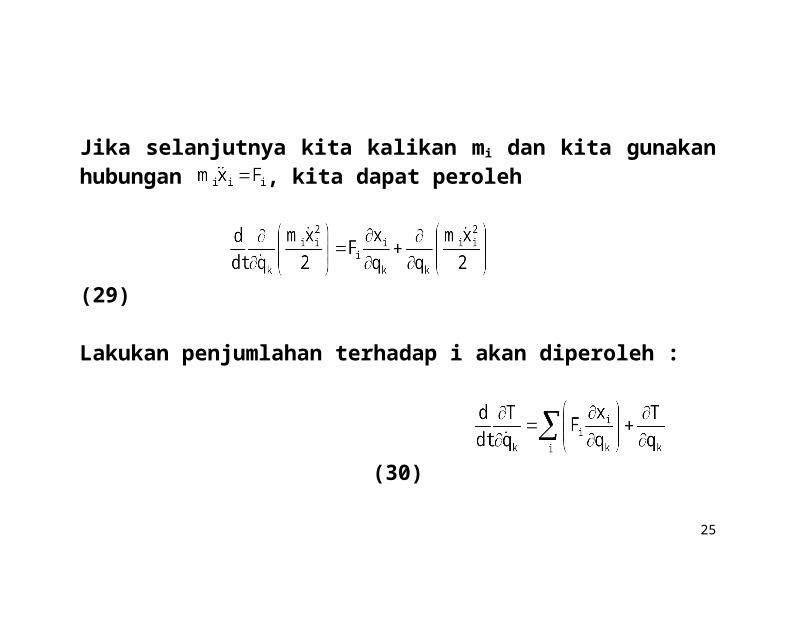
Jika selanjutnya kita kalikan mi dan kita gunakan hubungan , kita dapat peroleh
(29)
17
Lakukan penjumlahan terhadap i akan diperoleh :
(30)
Dari definisi gaya rampatan kita peroleh
(31)
Dikenal dengan persamaan Lagrange untuk gerak.Dalam kasus gerakannya adalah konservatif, persamaan Lagrange
dapat ditulis sebagai berikut:
18

(32)
Persamaan ini biasanya ditulis dalam bentuk yang lebih singkat dengan mendefinisikan fungsi Lagrangian L yakni
L = T - V (33)
Yang berarti bahwa kita dapat menyatakaan T dan V dalam koordinat rampatan. Oleh karena V = V(qk) dan , kita peroleh
dan (34)
Persamaan Lagrange dapat ditulis
19
(35)
Persamaan diferensial gerak untuk suatu sistem konservatif dapat dicari jika kita ketahui fungsi Lagrangian dalam bentuk koordinat tertentu.
Jika gaya rampatan tidak konservatif, misalkan nilainya adalah , maka kita dapat menuliskan
(36)
Dapat mendefinisikan sebuah fungsi Lagrangian L = T - V, dan menuliskan persamaan diferensial gerak dalam bentuk
(37)
20
(37)
Bentuk di atas lebih mudah dipakai jika gaya gesekan diperhitungkan.
BEBERAPA CONTOH PEMAKAIAN PERSAMAAN LAGRANGE
Prosedur umum yang dipakai untuk mencari persamaan diferensial gerak dari sebuah sistem sebagai berikut:
1. Pilih sebuah kumpulan koordinat untuk menyatakan konfigurasi sistem.
21
2. Cari energi kinetik T sebagai fungsi koordinat tersebut beserta turunannya terhadap waktu.
3. Jika sistem tersebut konservatif, cari energi potensial V sebagai fungsi koordinatnya, atau jika sistem tersebut tidak konservatif, cari koordinat rampatan Qk.
4. Persamaan deferensial gerak selanjutnya dapat dicari dengan menggunakan persamaan di atas.
Contoh :
1. Pandanglah sebuah partikel bermassa m yang bergerak akibat pengaruh gaya sentral pada sebuah bidang. Rumuskan persamaan gerak partikel tersebut.
Misalkan koordinat polar (r,) digunakan sebagai koordinat rampatan. Koordinat Cartesian (r,) dapat dihubungkan melalui :
x = r cos y = r sin
22
Energi kinetik :
Energi potensial oleh gaya sentral
Persamaan Lagrange :
Persamaan Lagrange:
23
Substitusi q1 = r dan q2 = , diperoleh:
Dari kedua persamaan di atas diperoleh:
24
Untuk partikel yang bergerak dalam medan konservatif :
Persamaan Lagrange :
25

atau :
Hal ini berarti bahwa J merupakan momentum sudut yang nilainya konstan. Integrasi persamaan di atas menghasilkan
= konstan
Berdasarkan persamaan di atas dapat dikatakan bahwa dalam medan konservatif momentum sudut J, merupakan tetapan gerak.
26