perpustakaan.fmipa.unpak.ac.idperpustakaan.fmipa.unpak.ac.id/file/bab i - vi.docx · web viewuart...
TRANSCRIPT

BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan dunia elektronika sedang berkembang, terutama di bidang
robotika. Terbukti dengan diadakannya Kontes Robot Cerdas Indonesia (KRCI)
yang dimulai pada tahun 2004 hingga sekarang dan diikuti oleh perguruan-
perguruan tinggi di seluruh Indonesia.
Robot cerdas dibedakan ke dalam beberapa jenis, yang terdiri dari robot
non mobile, mobile, dan humanoid. Robot non mobile merupakan tipe robot yang
tidak dapat bergerak, robot jenis ini sering digunakan oleh pihak industri untuk
proses yang sifatnya tidak bisa dilakukan oleh manusia. Robot mobile memiliki
fungsi dapat bergerak dan berpindah tempat dengan menggunakan roda maupun
kaki-kaki. Robot humanoid merupakan robot yang menyerupai manusia baik dari
gerakan maupun sifatnya, robot jenis ini dapat menggantikan peran kerja manusia.
Robot Pengikut Cahaya (Light Follower) termasuk kedalam jenis robot
mobile, robot ini menggunakan sensor cahaya sehingga dapat bergerak sesuai
dengan intensitas cahaya yang diterima sensor. Untuk mengendalikan gerakan
dari sebuah robot harus menggunakan sistem yang kompleks, karena memiliki
instruksi-instruksi yang sangat berkaitan dan berkesinambungan, misalnya kapan
robot harus berjalan, belok atau berhenti. Hal tersebut memberikan inspirasi
dalam pembuatan Robot Light Follower dengan menggunakan mikrokontroller
Arduino sebagai mikrokontroler yang dapat mengendalikan seluruh komponen
robot dan Light Dependent Resistor (LDR) sebagai sensor yang dapat menangkap
sinar cahaya sehingga dapat memberikan inputan kepada arduino sebagai
mikrokontroler.
1
1.2 Tujuan
Tujuan penelitian ini adalah merancang dan mengimplementasikan “Robot
Light Follower menggunakan Mikrokontroler Arduino dan Sensor Cahaya (Light
Dependent Resistor).
1.3 Ruang Lingkup
Ruang lingkup penelitian ini meliputi proses perancangan dan
pembangunan robot. Robot yang digunakan menggunakan mikrokontroler
arduino uno sebagai pengendali dan menggunakan tiga sensor cahaya Light
Dependent Resistor (LDR) yang ditempatkan di bagian depan robot. Cahaya yang
dapat diterima oleh sensor meliputi cahaya senter, lilin, dan infra merah. Output
yang dihasilkan yaitu bergeraknya robot mengikuti cahaya yang diterima oleh
sensor.
1.4 Manfaat
Manfaat penelitian ini adalah mengembangkan prototype seebagai bahan
pembelajaran pada bidang elektronika dan robotika. Selain itu sebagai robot
cerdas yang dapat diaplikasikan untuk membantu manusia dalam menentukan
jalan keluar di area yang tidak dapat dijangkau oleh manusia.
2

BAB II
TINJAUAN PUSTAKA
2.1 Pengertian Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik
menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program
yang telah didefinisikan terlebih dulu (kecerdasan buatan). Robot biasanya
digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor.
Biasanya kebanyakan robot industri digunakan dalam bidang produksi.
Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun,
penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan
tolong" (search and rescue), dan untuk pencarian tambang. Belakangan ini robot
mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah
tangga, seperti penyedot debu, dan pemotong rumput.
(http://imammarzuki.wordpress.com/2007/12/13/pengertian-robot/)
2.2 Pengertian Mikrokontroler
Mikrokontroler adalah suatu keping IC dimana terdapat mikroprosesor dan
memori program (ROM) serta memori serbaguna (RAM), bahkan ada beberapa
jenis mikrokontroler yang memiliki fasilitas ADC, PLL, EEPROM dalam satu
kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan
populer. Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel,
Microchip, Winbond, Atmel, Philips, Xemics dan lain - lain. Dari beberapa
vendor tersebut, yang paling populer digunakan adalah mikrokontroler buatan
Atmel (Heryanto, 2008).
2.2.1 Mikrokontroller Arduino dengan Mikrokontroller ATMega 328
Arduino Duemelanove adalah board mikrokontroler berbasis ATmega328.
Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat
3

digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal,
koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung
mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board
Arduino ke komputer dengan menggunakan kabel USB atau listrik dengan AC
yang-ke adaptor-DC atau baterai untuk menjalankannya. Berbeda dengan semua
board sebelumnya dalam hal koneksi USB-to-serial yaitu menggunakan fitur
Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan
board sebelumnya yang menggunakan chip FTDI driver USB-to-serial. Untuk
lebih jelasnya dapat digambarkan oleh pingmap Arduino dan ATMega pada
gambar 1. (http://agfi.staff.ugm.ac.id/blog)
Berikut fitur-fitur Mikrokontroler ATMega 328
1. Microcontroller ATmega328
2. Operasi dengan daya 5V Voltage
3. Input Tegangan (disarankan) 7-12V
4. Input Tegangan (batas) 6-20V
5. Digital I / O Pins 14 (dimana 6 memberikan output PWM)
6. Analog Input Pin 6
4
Gambar 1. Pingmap Arduino dan ATMega 328

7. DC Lancar per I / O Pin 40 mA
8. Saat 3.3V Pin 50 mA DC
9. Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh
bootloader
10. SRAM 2 KB (ATmega328)
11. EEPROM 1 KB (ATmega328)
12. Clock Speed 16 MHz
2.2.1.1 Daya
Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya
eksternal (otomatis). Eksternal (non-USB) daya dapat berasal baik dari AC-ke
adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan
plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari
baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor
POWER.
Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai
dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat
beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator
tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
1. VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan
sumber daya eksternal (sebagai pengganti dari 5 volt koneksi USB atau
sumber daya lainnya).
2. 5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya.
3. 3v3. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board.
4. GND. Ground pin.
2.2.1.2 Memori
ATmega328 memiliki 32 KB (dengan 0,5 KB digunakan untuk
bootloader), 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis
dengan EEPROM liberary).
5

2.2.1.3 Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input
atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan
digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau
menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default
terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan
(TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip
Serial ATmega8U2 USB-to-TTL.
2. Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt
pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan
nilai.
3. PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi
analogWrite ().
4. SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi
SPI menggunakan SPI library.
5. LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai
nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Selain itu memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang
masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang
berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
1. I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan
perpustakaan Wire.
2. Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan
dengan fungsi analogReference ().
3. Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
2.1.1.4. Komunikasi
6

Arduino memiliki sejumlah fasilitas untuk berkomunikasi dengan
komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan
UART TTL (5V) untuk komunikasi serial, yang tersedia di pin digital 0 (RX) dan
1 (TX). Sebuah ATmega8U2 sebagai saluran komunikasi serial melalui USB dan
sebagai port virtual com untuk perangkat lunak pada komputer. Firmware ’8 U2
menggunakan driver USB standar COM, dan tidak ada driver eksternal yang
diperlukan. Namun, pada Windows diperlukan, sebuah file inf. Perangkat lunak
Arduino terdapat monitor serial yang memungkinkan digunakan memonitor data
tekstual sederhana yang akan dikirim ke atau dari board Arduino. LED RX dan
TX di papan tulis akan berkedip ketika data sedang dikirim melalui chip USB-to-
serial dengan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial
pada pin 0 dan 1).
Sebuah SoftwareSerial library memungkinkan untuk berkomunikasi
secara serial pada salah satu pin digital pada board. ATmega328 juga mendukung
I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan
Kawat untuk menyederhanakan penggunaan bus I2C. Untuk komunikasi SPI,
menggunakan perpustakaan SPI.
2.3 Pengertian Sensor
Sensor adalah jenis tranduser yang digunakan untuk mengubah besaran
mekanis, magnetis, panas, sinar, dan kimia menjadi tegangan dan arus listrik.
Sensor sering digunakan untuk pendeteksian pada saat melakukan pengukuran
atau pengendalian.
Beberapa jenis sensor yang banyak digunakan dalam rangkaian elektronik
antara lain sensor cahaya, sensor suhu, dan sensor tekanan.
(http://www.musbikhin.com/pengertian-sensor-dan-macam-macam-sensor)
2.4 Sensor Light Dependent Resistor (LDR)
Sensor cahaya adalah sensor yang berfungsi mengubah besaran cahaya
menjadi intensitas listrik. Dengan kata lain besarnya cahaya yang masuk kedalam
area sensor tersebut akan diubah menjadi listrik dan nilainya dapat dihitung.
7

LDR adalah sebuah sensor cahaya dimana jika cahaya yang masuk
kedalam sensor tersebut semakin sedikit, maka resistansinya akan semakin besar
demikian juga sebaliknya jika intensitas cahaya yang masuk semakin banyak
maka resistansinya (hambatan) akan semakin sedikit, LDR dihitung dalam satuan
ohm.
Karakteristik LDR terdiri dari dua macam, yaitu Laju Recovery dan
Respon Spektral.
1. Laju Recovery
Bila sebuah LDR dibawa dari suatu ruangan dengan level kekuatan cahaya
tertentu kedalam suatu ruangan yang gelap, maka bisa kita amati bahwa nilai
resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan ruangan
gelap tersebut. Namun LDR tersebut hanya akan bisa mencapai harga di
kegelapan setelah mengalami selang waktu tertentu. Laju recovery merupakan
suatu ukuaran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu.
Harga ini ditulis dalam K/detik, untuk LDR type arus harganya lebih besar dari
200 K/detik (selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan
tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke
tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai
resistansi yang sesuai dengan level cahaya 400 lux.
2. Respon Spektral
LDR tidak mempunyai sensitivitas yang sama untuk setiap panjang
gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan
sebagai penghantar arus listrik yaitu tembaga, alumunium, baja, emas, dan
perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling
banyak digunakan karena mempunyai daya hantar yang baik.
Resistansi LDR akan berubah seiring dengan perubahan intensitas cahaya
yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi
LDR sekitar 10MΩ dan dalam keadaan terang sebesar 1KΩ atau kurang. LDR
terbuat dari bahan semikonduktor seperti kadmium sulfida. Dengan bahan ini
energi dari cahaya yang jatuh menyebabkan lebih banyak muatan yang dilepas
atau arus listrik meningkat. Artinya resistansi bahan telah mengalami penurunan.
8

Bagian-bagian dari LDR dapat dilihat pada gambar 2.
(http://xsensor232.blogspot.com/2011/05/sensor-cahaya.html)
2.5 Resistor
Resistor adalah komponen pasif elektronika yang digunakan untuk
membatasi jumlah arus yang mengalir dalam satu rangkaian. Satuan resistansi
(hambatan) dari suatu resistor disebut Ohm atau dilambangkan dengan simbol Ω.
Resistansi dari sebuah resistor dapat dijelaskan pada gambar 3 dan tabel 1.
9
Cincin 1 : angka pertama
Cincin 2 : angka kedua
Cincin 3 : faktor pengali
Cincin 4 : toleransi (%)
Gambar 3. Resistor
Gambar 2. Bagian-bagian LDR

2.6 Kapasitor
Kondensator (Capasitor) adalah suatu alat yang dapat menyimpan
energi di dalam medan listrik, dengan cara mengumpulkan ketidakseimbangan
internal dari muatan listrik. Kondensator memiliki satuan yang disebut Farad.
Satuan dalam kondensator disebut Farad. Satu Farad = 9 x 1011 cm² yang artinya
luas permukaan kepingan tersebut menjadi 1 Farad sama dengan 106 mikroFarad
(µF), jadi 1 µF = 9 x 105cm². Bentuk Kapasitor dapat dilihat pada gambar 4
dibawah ini.
Seperti halnya resistor, kapasitor mempunyai kode warna untuk
menentukan besarnya kapasitansi. Pada Tabel berikut merupakan kode warna dari
Kapasitor seperti pada tabel 2.
10
Tabel 1. Tabel nilai warna cincin resistor
Gambar 4. Kapasitor

Tabel 2. Tabel nilai toleransi voltase kapasitor
2.7 Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk,
misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor,
mengangkat bahan. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan
angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri
sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik
total di industri.
Motor DC memerlukan suplai tegangan yang searah pada kumparan
medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc
disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor
(bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada
medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada
setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja
dari arus searah adalah membalik phasa tegangan dari gelombang yang
mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus
yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet.
11
Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar
bebas di antara kutub-kutub magnet permanen.
2.8 IC Driver Motor L298D
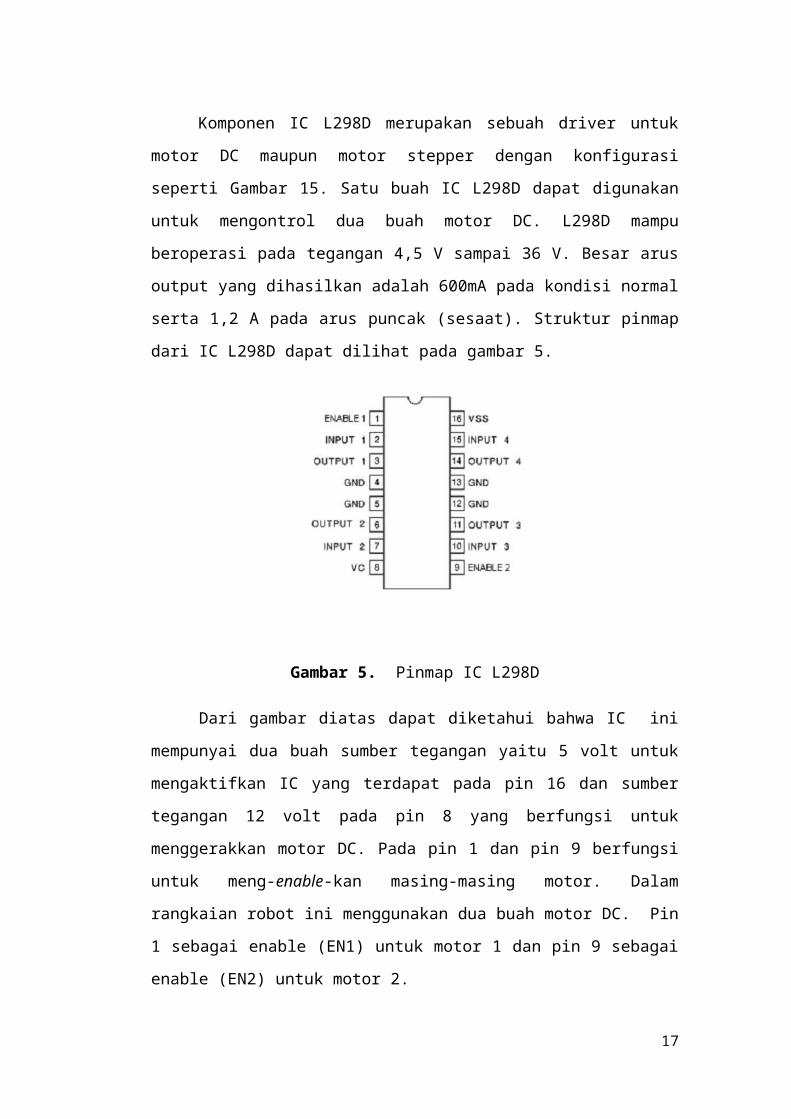
Komponen IC L298D merupakan sebuah driver untuk motor DC maupun
motor stepper dengan konfigurasi seperti Gambar 15. Satu buah IC L298D dapat
digunakan untuk mengontrol dua buah motor DC. L298D mampu beroperasi pada
tegangan 4,5 V sampai 36 V. Besar arus output yang dihasilkan adalah 600mA
pada kondisi normal serta 1,2 A pada arus puncak (sesaat). Struktur pinmap dari
IC L298D dapat dilihat pada gambar 5.
Gambar 5. Pinmap IC L298D
Dari gambar diatas dapat diketahui bahwa IC ini mempunyai dua buah
sumber tegangan yaitu 5 volt untuk mengaktifkan IC yang terdapat pada pin 16
dan sumber tegangan 12 volt pada pin 8 yang berfungsi untuk menggerakkan
motor DC. Pada pin 1 dan pin 9 berfungsi untuk meng-enable-kan masing-masing
motor. Dalam rangkaian robot ini menggunakan dua buah motor DC. Pin 1
sebagai enable (EN1) untuk motor 1 dan pin 9 sebagai enable (EN2) untuk motor
2.
2.9 Penelitian Sebelumnya
“Sistem Gerak Robot Pengikut Cahaya (Light Follower) Menggunakan
Motor DC Berbasis Mikrokontroler ATMEGA8535 dengan Sensor Cahaya
12

(LDR)”. Disusun oleh Setiadi sebagai tugas akhir pada tahun 2010 di Universitas
Dipenogoro, Semarang.
Abstract
Telah dilakukan perancangan dan realisasi sistem gerak robot light
follower menggunakan motor DC berbasis mikrokontroler Atmega8535. Sistem
ini merupakan suatu sistem robot bergerak dengan mengikuti cahaya yang
diterima.
Sistem terdiri atas perangkat keras dan perangkat lunak. Perangkat keras
terdiri atas mikrokontroler Atmega8535, motor DC dan driver motor DC IC
L293D. Perangkat lunak mikrokontroler dalam penelitian ini dibuat dengan
menggunakan bahasa C. Sistem ini bekerja setelah ditekannya tombol pengatur
pada mikrokontroler kemudian mikrokontroler menerima data dari pengatur
tersebut, dari mikrokontroler akan mengirim data ke driver motor DC L293D.
Setelah mengirim data ke driver motor DC, mikrokontroler mengontrol sistem
gerak dari motor DC.
Sistem ini telah terealisasi dan dapat menggerakan motor DC sesuai
dengan intensitas cahaya yang diterima.
13

BAB III
METODOLOGI PENELITIAN
3.1 Metode Penelitian
Metode penelitian yang digunakan adalah menggunakan Metode
Penelitian bidang Hardware Programming yang disajikan pada gambar 6.
14

Gambar 6 . Metode Penelitian Hardware Programming
1. Perencanaan Proyek Penelitian (Project Planning)
Dalam perencanaan proyek penelitian, terdapat beberapa hal penting yang
harus ditentukan dan dipertimbangkan, antara lain:
a. Penentuan topik Penelitian
b. Estimasi kebutuhan alat dan bahan
c. Estimasi anggaran
2. Penelitian (Research)
Penelitian awal dari aplikasi yang akan dibuat, mulai dari pemilihan dan
pengetesan komponen (alat dan bahan) yang akan digunakan, kemungkinan
rancangan awal dan akhir.
3. Pengetesan Komponen (Parts Testing)
Dalam pengetesan komponen dilakukan pengetesan alat terhadap fungsi kerja
komponen berdasarkan kebutuhan dari aplikasi yang akan didesain.
4. Desain Sistem Mekanik (Mechanical Design)
Dalam perancangan perangkat keras, desain mekanik merupakan hal penting
yang harus dipertimbangkan. Pada umumnya kebutuhan aplikasi terhadap desain
mekanik antara lain:
a. Bentuk dan ukuran protoboard
b. Ketahanan dan fleksibilitas terhadap lingkungan
c. Penempatan modul-modul elektronik
5. Desain Sistem Listrik (Electrical Design)
15

Bootloader & Library
Mikrokontroler ATMega 328
Sensor Cahaya
Blok Rangkaian Motor DC
Motor DC LM298
Bootloader & Library
Dalam desain sistem listrik dan mekanis terdapat beberapa hal yang harus
diperhatikan, antara lain:
a. Sumber catu daya
b. Kontroler yang akan digunakan
c. Desain driver untuk pendukung aplikasi
Dalam desain driver pendukung yang akan digunakan, diantaranya:
1. Menggunakan Arduino IDE 022
2. Menggunakan Fritzing
d. Desain sistem kontrol yang akan diterapkan
e. Skematik sistem robot.
f. Flowchart perancangan sistem Robot.
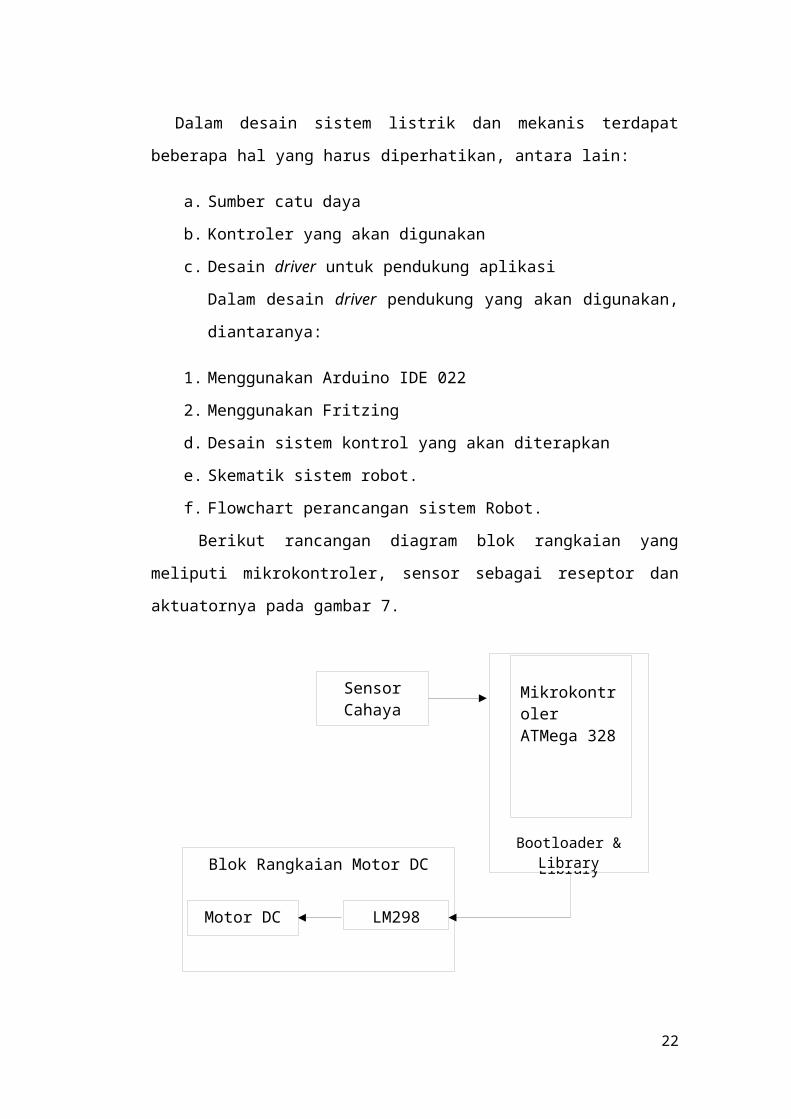
Berikut rancangan diagram blok rangkaian yang meliputi mikrokontroler,
sensor sebagai reseptor dan aktuatornya pada gambar 7.
Gambar 7 . Diagram blok sistem
16
6. Desain Software (Software Design)
Perangkat lunak yang pada umumnya dibutuhkan perancangan perangkat
keras antara lain, software untuk sistem kontrol alat (aplikasi) dan software
interface pada komputer PC. Pada proses ini digambarkan diagram alir dari
rancangan software yang disajikan pada gambar 8 berikut ini.
Gambar 8 . Flowchart Sistem
17

7. Tes Fungsional (Functional Test)
Tes fungsional dilakukan terhadap integrasi sistem listrik, mekanis dan
software yang telah didesain. Tes fungsional dilakukan integrasi sistem listrik dan
software yang telah di desain. Tes ini dilakukan untuk meningkatkan performa
dari perangkat lunak untuk pengontrolan desain listrik dan mengeliminasi error
(Bug) dari software tersebut.
8. Integrasi atau Perakitan (Integration)
Modul listrik yang diintegrasi dengan software di dalam kontrollernya,
diintegrasikan dalam struktur mekanik yang telah dirancang. Lalu dilakukan tes
fungsional keseluruhan sistem.
9. Tes Fungsional Keseluruhan sistem (Overall Testing)
Pada tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem.
Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang
tidak dapat bekerja dengan baik maka harus dilakukan proses perakitan ulang
pada setiap desain sistemnya.
10. Optimasi Sistem (Optimization)
Optimasi untuk meningkatkan performa dari aplikasi yang telah dirancang.
Optimasi ditekankan pada desain mekanik agar penggunaan lebih maksimal.
18
BAB IV
PERANCANGAN DAN IMPLEMENTASI
Dalam bab ini akan membahas perancangan dan implementasi Robot Light
Follower dengan menggunakan Arduino dan Sensor Cahaya Light Dependent
Resistor (LDR) berdasarkan metode penelitian yang digunakan, mulai dari
perencanaan proyek penelitian sampai dengan integrasi sistem.
4.1 Perancangan
4.1.1 Perencanaan Proyek Penelitian (Project Planning)
Dalam perencanaan proyek penelitian, terdapat beberapa hal penting yang
harus ditentukan dan dipertimbangkan, antara lain:
1. Penentuan topik Penelitian
Dalam penelitian ini topik yang diambil adalah ”Robot Light Follower
Menggunakan Arduino Dan Sensor Light Dependent Resistor (LDR)”.
2. Estimasi kebutuhan alat dan bahan.
Pada tahap ini dilakukan etsimasi kebutuhan alat dan bahan yang akan
digunakan dalam penelitian. Spesifikasi kebutuhan dan alat yang gunakan
antara lain :
a. Komputer
Processor AMD E350 1,6 GHz, Ram 1Gb, hardisk 320 Gb.
b. Komponen yang dibutuhkan
1. Arduino Uno dengan ATMega 328
2. Sensor Cahaya (Light Dependent Resistor)
3. ProtoBoard
4. GearBox
5. Motor DC
6. Acrylic
7. Kabel Jumper
8. Clip Baterai
9. Driver Motor IC
19

10. Battery 9v
11. Roda
12. BallCluster
13. Switch
14. Spacer
3. Perangkat lain
Sistem operasi yang diperlukan Windows 7, bahasa pemograman dan
software yang digunakan bahasa C, Aduino Alpa Sofware 0023, dan
fritzing.
4. Estimasi Anggaran
Dalam merancang robot light follower memerlukan estimasi anggaran,
berikut estimasi anggaran yang disajikan pada table 2.
Tabel 3. Estimasi Anggaran
Komponen Harga
Arduino Uno Rp.275.000,-
Sensor cahaya LDR Rp.20.000,-
Gearbox Rp.130.000,-
Jumper Rp.60.000,-
Ballcluster Rp.60.000,-
Acrylic Rp.40.000,-
Driver motor Rp.90.000,-
Resistor, switch, spacer Rp.20.000,-
Baterai, clip baterai, protoboard Rp.60.000,-
Jumlah Rp.755.000,-
4.1.2 Penelitian (Research)
Setelah perencanaan yang matang, dilanjutkan dengan penelitian awal dari
aplikasi yang akan dibuat. Pada tahap penelitian dilakukan perancangan awal
rangkaian robot light follower. Hal ini dilakukan untuk mengetahui bagaimana
sistem ini bekerja.
20

Mikrokontroler sebagai pengendali robot mendapat input dari sensor
cahaya (LDR) yang dijadikan input di dalam proses kontrol atau kendali arah
gerak.
Bila salah satu LDR mendapat cahaya, maka akan diteruskan ke aduino
sebagai mikrokontroler dan mengirimkan sinyal kepada driver motor sehingga
dapat menggerakan motor DC dan robot akan bergerak sesuai dengan cahaya yang
diterima.
4.1.3 Gambaran Umum Sistem
Alat yang akan dirancang dan diimplementasikan ini dapat mengikuti
cahaya. Dalam membangun aplikasi ini terdapat Sensor Light Dependent Resistor
sebagai sensor penerima cahaya yang mempunyai fungsi sebagai input untuk
memerintahkan motor dc untuk maju dan berbelok. Pada dasarnya aplikasi ini
terdiri dari beberapa bagian, diantaranya :
1. Catu daya yaitu untuk memberi tegangan atau masukkan arus yang
akan disalurkan pada rangkaian tersebut.
2. Modul AVR yaitu rangkaian yang berfungsi sebagai pengontrol utama
sistem elektoronika.
3. Downloader yaitu berfungsi untuk mendonwloader program kedalam
modul AVR.
4. Rangkaian sensor LDR yang dapat menerima cahaya sebagai inputan
5. Rangkaian Motor DC sebagai penggerak.
4.1.4 Prinsip Kerja Sistem
Rangkaian robot light follower ini mempunyai prinsip kerja sebagai
berikut, sistem robot light follower akan bergerak mengikuti arah cahaya ketika
sensor Light Dependent Resistor mendapatkan input dari cahaya yang telah
ditentukan ke mikrokontroler yang akan menjalankan salah satu ataupun kedua
motor DC sehingga robot dapat bergerak lurus dan berbelok.
21
Sensor Cahaya
protoboard
Driver motor IC L928
Arduino Uno
Motor DC
4.1.5 Desain Miniatur
Desain miniatur ini diperlukan sebagai acuan dalam pembuatan miniatur
robot beroda. Desain robot ini membantu seberapa besar dimensi miniatur akan
dibuat dan sebagai denah penyimpanan modul-modul yang akan diterapkan.
Adapaun tampilan denah miniatur dapat di lihat pada gambar 9.
Gambar 9. Miniatur Robot
4.1.6 Pengetesan Komponen (Parts Testing)
Pada tahap ini dilakukan pengetesan komponen-komponen yang akan
digunakan berfungsi atau tidak. Pengetesan komponen dilakukan menggunakan
multimeter serta menggunakan program yang digunakan.
a. Pengetesan menggunakan program
1. Arduino Uno
Pengetesan awal dilakukan dengan menyambungkan arduino dengan
komputer melalui downloader. Setelah dihubungkan, maka lampu led
yang ada pada arduino akan menyala. Hasil dari pengetesan dapat
dilihat pada gambar 10.
Gambar 10. Led pada Arduino Uno menyala
22

2. Modul Downloader
Pengetesan komponen ini dengan cara menghubungkan port serial
kepada usb komputer. Setelah itu dibaca pada Aduino Alpha Sofware
0023. Tes ini berhasil ketika versi Arduino Uno ATMega 328 dibaca
oleh Aduino Alpha Sofware 0023.
Gambar 11 . Proses pembacaan Arduino Uno
dibaca oleh Aduino Alpa Sofware 0023
b. Pengetesan menggunakan multimeter
1. Resistor
2. Kabel
3. Sensor LDR
4. Motor DC
4.1.7 Desain Sistem Mekanik (Mechanical Design)
Dalam perancangan perangkat keras, desain mekanik merupakan hal
penting yang harus dipertimbangkan. Pada umumnya kebutuhan aplikasi terhadap
desain mekanik antara lain:
23

a. Bentuk dan ukuran Protoboard
Untuk rangkaian robot light follower ukuran Protoboard yang digunakan
disesuaikan dengan jumlah rangkaian yang dibutuhkan dan ukuran rangka
robot. Bentuk dan ukuran protoboard dapat dilihat pada gambar 12.
Gambar 12 . Bentuk dan ukuran Protoboard
b. Dimensi dan massa keseluruhan sistem
Untuk dimensi dan massa keseluruhan sistem dibuat seminimal mungkin,
agar dapat mengefisienkan dan meminimalisasi dana yang digunakan serta
memberikan kenyamanan pada pengguna. Dalam desain sistem mekanik
pada penelitian ini, dibuat suatu miniatur robot sebagai percobaan alat.
c. Ketahanan dan fleksibilitas terhadap lingkungan
Robot ini hanya digunakan sebagai prototype, sehingga hanya bisa
digunakan pada area yang datar dan tidak bergelombang.
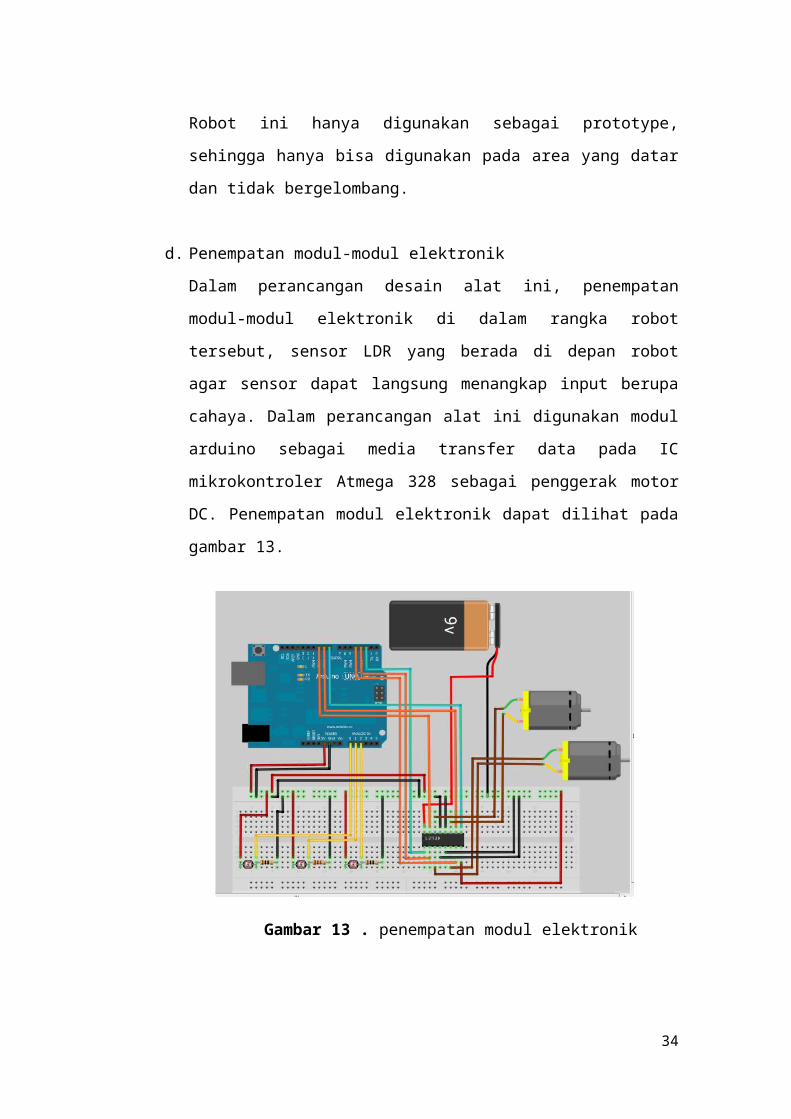
d. Penempatan modul-modul elektronik
Dalam perancangan desain alat ini, penempatan modul-modul elektronik di
dalam rangka robot tersebut, sensor LDR yang berada di depan robot agar
sensor dapat langsung menangkap input berupa cahaya. Dalam perancangan
alat ini digunakan modul arduino sebagai media transfer data pada IC
24

mikrokontroler Atmega 328 sebagai penggerak motor DC. Penempatan
modul elektronik dapat dilihat pada gambar 13.
Gambar 13 . penempatan modul elektronik
Gambar 13 adalah penempatan modul-modul yang digunakan untuk robot
light follower diantaranya adalah mikrokontroler arduino uno, 2 motor DC,
3 sensor cahaya light dependent resistor, IC L298, dan batereai 9 volt
sebagai catu daya.
Sensor LDR dihubungkan dengan pin A0, A1, dan A2 pada arduino sebagai
input analog. Pin 2,3,4,8,9, dan 10 dihubungkan dengan IC L298 sebagai
output dan akan dihubungkan kembali dengan motor DC. pin 2 dan 8 pada
arduino dihubugkan dengan enable 1 dan enable 2 pada IC motor yang
berfungsi untuk mengaktifkan motor kanan dan motor kiri sementara pin 3,
4, 9 dan 10 dihubungkan dengan input IC dan akan dihubungkan dengan
kedua motor yang berfungsi menggerakan kedua motor.
4.1.8 Rancangan Hardware (Alat)
25

Bootloader & Library
Mikrokontroler ATMega 328
Sensor Cahaya
Blok Rangkaian Motor DC
Motor DC LM298
Bootloader & Library
Rancangan hardware secara umum digambarkan pada blok diagram pada
gambar 14.
4.1.9 Rangkaian Catu Daya
Rangkaian catu daya memberikan supply tegangan pada rangkaian robot.
Rangkaian catu daya mendapatkan sumber tegangan sebesar 9 volt DC, tegangan
ini kemudian menjadi masuk ke rangkaian arduino ( atmega 328 ).
Gambar 15 . Rangkaian Skematik Baterai
Gambar 16 adalah sebuah baterai DC yang memiliki tegangan 9 volt yang
cukup untuk memberikan energi kedalam mikrokontroler. Terdiri dari vcc yang
mengalirkan 9 volt dan ground sebagai penyeimbang.
4.1.10 Rangkaian Modul AVR Pada Arduino
26
Gambar 14 . Diagram blok robot

Rangkaian modul avr adalah rangkaian untuk memasukkan program ke
dalam IC mikrokontroler dengan bantuan program aplikasi Aduino Alpa Sofware
0023 untuk mendownload serta berfungsi sebagai modul untuk menjalankan
robot. Rangkaian ini menggunakan sumber tegangan 9V, yang keluar dari
rangkaian catu daya.
Gambar 16. Skematik Rangkaian Modul AVR 328
Gambar 16 merupakan gambaran rangkaian modul AVR Arduino UNO
yang terdiri dari 13 pin inputan digital dan 5 pin nputan analog, dan terdiri vcc
yang dapat menghasilkan daya sampai 5 volt.
4.1.11 Desain Sistem Listrik (Electrical Design)
Dalam desain sistem listrik terdapat beberapa hal yang harus diperhatikan,
antara lain:
a. Sumber catu daya (seperti baterai atau rectifier)
Catu daya yang akan digunakan pada rangkaian ini sebesar 9 volt. Dimana
pemakaian Arduino UNO ATMega 328 bekerja pada 5 volt untuk
menggerakan motor DC.
b. Kontroler yang akan digunakan
Kontroler yang digunakan dalam penelitian ini, menggunakan salah satu
produk keluaran dari atmel yaitu ATMega 328.
c. Desain driver untuk pendukung aplikasi
27

Desain driver untuk pendukung aplikasi ini menggunakan beberapa
software, diantaranya :
1. Menggunakan Aduino Alpa Sofware 0023 untuk mengkonversi listing
program dalam bentuk bahasa pemograman C/C++ kedalam bentuk
hex. Hasil konversi bahasa pemograman C/C++ kemudian ditransfer
kedalam IC mikrokontroler
2. Menggunakan fritzing sebagai simulator rangkaian minimum sebelum
dilakukan perakitan rangkaian untuk mengurangi kemungkinan error.
d. Desain sistem kontrol yang akan diterapkan
Sistem kontrol menggunakan bahasa pemograman C/C++ untuk
mengontrol nyala dan mati motor dc. Sehingga robo dapat berbelok.
e. Flowchart Perancangan Sistem Robot Light Follower
28

Gambar 17 . Flowchart Sistem Robot light follower
4.1.12 Tes Fungsional (Functional Test)
Tes fungsional dilakukan terhadap integrasi sistem listrik dan software
yang telah didesain. Tes ini dilakukan untuk meningkatkan performa dari
perangkat lunak untuk pengontrollan desain listrik dan mengeliminasi error (Bug)
dari software tersebut.
4.2 Implementasi
29

4.2.1 Integrasi atau Perakitan (Integration)
Modul listrik yang telah diintegrasi dengan software di dalam
kontrolernya, diintegrasi dalam struktur mekanik yang telah dirancang. Lalu
dilakukan tes fungsional keseluruhan sistem. Sistem antar muka yang dirancang
untuk memonitor daya dihubungkan dengan modul dan mikrokontroler melalui
komunikasi port serial.
4.2.2 Material Collecting
Pada tahap ini dilakukan pengumpulan alat dan bahan yang akan
digunakan untuk pembuatan sistem robot pemadam api berupa hardware yang
meliputi prototipe, modul AVR 328, LDR, Motor DC, Catu daya dan lain-lain.
4.2.3 Material Collecting Hardware
Terdiri dari :
a. Pengumpulan alat dan bahan pembuatan prototipe
Alat yang dibutuhkan untuk membuat prototipe diantaranya : Gergaji besi,
solder, lem, gunting, bor, dll. Sedangkan bahan yang dibutuhkan meliputi :
Acrylic, Timah solder, dll.
b. Pengumpulan komponen dasar
1. Mikrokontroler ATMega328
Sebagai kontrol utama sistem dan dapat berfungsi sebagai penyimpan
program yang telah diupload kedalam arduino.
Gambar 18. ATMega328
2. Sensor Cahaya (Light Dependent Resistor)
30

Sebagai sensor yang dapat menerima cahaya dan dapat dilihat pada
gambar 19.
Gambar 19. Sensor Cahaya Light Dependent Resistor
c. Pengumpulan alat dan bahan pembuatan rangkaian
Alat yang digunakan meliputi : solder, solder pump, catu daya 9 volt,
bor pcb dan mata bor, obeng, tang, dll. Sedangkan bahan yang
digunakan antara lain : papan pcb, socket, resistor , jumper, kabel,
timah, dll.
4.2.4 Material Collecting Software
Pada tahap ini dilakukan pengumpulan software-software penunjang yang
akan digunakan untuk mengimplementasikan kontrol pada Sitem Robot light
follower. Software-software tersebut adalah Aduino Alpa Sofware 0023 sebagai
compiler listing program bahas C/C++ berfungsi sebagai software downloader
4.2.5 Assembling
Tahap assembling (pembuatan) merupakan tahap dimana seluruh obyek
dibuat, baik secara hardware (miniatur dan rangkaian driver) serta secara software
yang merupakan compiler.
4.2.6 Assembling Hardware
Dalam tahap assembling hardware dilakukan dengan beberapa tahapan.
Tahapan yang dilakukan yaitu :
31

a. Pembuatan Miniatur Robot:
1. Alat dan bahan yang akan digunakan pada pembuatan miniatur
dikumpulkan, yaitu Acrylic serta alat yang lain. Selajutnya Acrylic
diukur dan dipotong dengan cutter sesuai dengan perancangan.
2. Rangkai modul cahaya, modul dinamo dan modul daya kedalam
Arduino Uno.
3. Setelah miniatur terbentuk sesuai dengan perancangan maka miniatur
dapat digunakan. Hasil pembuatan miniatur dapat dilihat pada gambar
20.
Gambar 20. Hasil Rakitan Miniatur
b. Pemasangan Rangkaian ke dalam Miniatur Robot
Pemasangan modul-modul ditempatkan pada miniatur untuk beberapa
modul diantaranya modul AVR, modul cahaya, motor dc dan Catu daya.
Tampilan modul dapat di lihat pada gambar 21.
32

Gambar 21 . Pemasangan modul-modul
4.2.7 Assembling Software
Compiler listing sistem robot light follower digunakan Arduino Alpha
Sofware 0023 untuk membuat file yang akan didownload ke mikrokontroler.
Langkah-langkah pada program ini secara garis besar dapat dilihat sebagai berikut
:
a. Jalankan Program Arduino Alpha Software 0023 sehingga muncul
tampilan seperti gambar 22 :
Gambar 22. Tampilan Arduino Alpha Sofware 0023
b. Pilih create a new file dengan File Type berupa Project dan setelah itu
akan menuju CodeWizardAVR untuk pembuatan listing program.
Kemudian dipilih pada menu Chip ATMega328. Selanjutnya dikonfigurasi
juga port-port mana saja yang akan digunakan sebagai input output.
33
(1) (2)
Gambar 23 . Tampilan Konfigurasi Arduino Alpha Sofware 0023
(1) Pemilihan tipe Chip ATMega328
Arduino Alpha Software 0023 memiliki jenis-jenis chip yang bisa
digunakan untuk berbagai board arduino. Robot light follower
menggunakan chip Arduino Uno.
(2) Konfigurasi Port yang dipakai
Sebelum bisa terhubung dengan board Arduino, harus melakukan
konfigurasi port yang digunakan. Dalam hal ini, port yang digunakan
yaitu port COM3.
c. Setelah konfigurasi Aduino Alpa Sofware 0023 selesai maka diklik File
kemudian pada menu pilih New, sehingga muncul tampilan seperti pada
gambar 24:
Gambar 24. Tampilan Arduino Alpha Sofware 0023
untuk pembuatan listing program
Setelah proses penulisan listing program telah selesai maka listing
program dicompile menggunakan CVAVR. Jika sudah tidak ada lagi error
pada listing program maka hasil compile kemudian dibuat (make)
projectnya.
34
Penulisan Program Utama robot Light
Follower

Gambar 25. Tampilan Arduino Alpha Sofware 0023
Saat mengupload program
35

BAB V
HASIL DAN PEMBAHASAN
5.1 Hasil
Setelah melalui tahap implementasi, yaitu proses rancangan dan proses
mengimplementasi sistem yang telah dibuat. Pada tahap ini sistem yang telah
dirancang akan di implementasikan ke dalam robot light follower.
4.1.1 Deskripsi dan Dimensi Alat
Alat yang dibuat untuk sistem robot light follower berbasis Atmega328
secara keseluruhan memiliki dimensi dengan ukuran untuk dasar 15,5 x 8 x 6 cm.
Untuk tempat / box bisa disesuaikan dari ukuran dan bentuk dari semua modul
yang dibuat.
Gambar 26. Gabungan dari beberapa modul
Pada gambar 26 inputan dihasilkan dari sensor LDR sehingga dapat
bergerak dan mengikuti cahaya, rangkaian modul Mikrokotroller diberi tegangan
input sebesar 9v dengan menggunakan adaptor atau baterai.
Robot light follower ini merupakan robot prototype dan hanya dapat
berjalan pada area yang datar dan tidak bergelombang.
36

4.2 Pembahasan
Pada tahap pembahasan ini akan dibahas mengenai bagaimana sistem
bekerja mulai dari tahap awal pemberian inputan yang berupa cahaya. Pada tahap
awal sistem diberikan catu daya yang berasal dari baterai. Baterai yang digunakan
sebanyak 3 buah baterai 9 volt, 1 baterai digunakan untuk inputan arduino dan
akan digunakan kembali oleh 3 buah sensor dan IC motor L928 sebesar 5 volt.
Motor DC menggunakan 2 baterai 9 volt ang dirangkai seri sehingga
menghasilkan daya sebesar 18 volt.
Gambar 27. Tampilan Robot
Sensor Light Dependent Resistor akan menentukan tingkat cahaya yang
dipancarkan kepada sensor sehingga nilai resistansinya dapat diketahui. Setelah
resistansi diketahui, maka sensor akan memberikan nilai digital ke dalam
mikrokontroler Arduino Uno, apabila salah satu sensor atau lebih memberikan
nilai digital yang bernilai lebih dari batas yang telah ditentukan, maka
mikrokontroler akan memberikan sinyal kepada driver motor IC L298 dan akan
menentukan motor mana yang akan bergerak sehingga motor akan bergerak ke
arah cahaya yang dipancarkan.
4.2.1 Tes Fungsional Keseluruhan Sistem (Overall Testing)
Pada tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem.
Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang
tidak dapat bekerja dengan baik maka harus dilakukan proses perakitan ulang
37

setiap bagian sistemnya. Uji coba ini meliputi uji coba struktural, fungsional dan
uji coba validasi.
4.2.1.1 Pengujian Struktural
Tahapan ini dilakukan dengan tujuan untuk mengetahui apakah sistem
yang sudah dibuat sesuai dengan rancangan yang sudah ada. Pada pengujian ini
alat yang digunakan adalah multitester.
4.2.1.1.1 Blok Rangkaian Robot Light Follower
Pengujian pada blok rangkaian robot light follower apakah pin dari
mikrokontroler terhubung dengan modul-modul yang dibuat sehingga dapat
berfungsi sebagaimana mestinya.
Pin-pin yang digunakan adalah pin A0, pinA1, dan pinA3 untuk input
analog dan pin 2, 3, 4, 8, 9 , dan 10 untuk output yang terhubung dengan modul
sensor dan modul lainya. Pengujian dilakukan dengan cara :
1. Pin 0, 1 dan 2 analog dengan sensor cahaya LDR.
2. Pin 2, 3, 4, 8, 9 , dan 10 dengan driver motor IC L298 dan akan
diteruskan kepada motor DC.
Pada pengujian diatas jika pada setiap kaki sudah terhubung maka
alat akan menunjukkan Hasil pengujian diatas dapat dilihat pada
tabel 4.
Pin Mikrokontroler Pin yang dihubungkan keterangan
Pin 0, 1 dan 3 analog LDR terhubung
Pin 2, 3, 4, 8, 9 , dan 10 Driver motor IC L298 terhubung
4.2.1.2 Uji Coba Fungsional
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui
apakah uji coba yang dilakukan sudah berjalan dengan baik dan sesuai dengan
sistem yang ada. Untuk pengujian perangkat keras alat yang digunakan adalah
multitester dengan satuan daya DC Volt, dimana pena positif pada multitester
harus diletakkan pada Vcc dan pena negatif diletakkan pada ground.
38
Tabel 4. Hasil pengujian struktural Robot light follower

4.2.1.2.1 Pengujian Blok Catu Daya
Pengujian ini bertujuan untuk mengetahui tegangan yang dihasilkan oleh
rangkaian catu daya. Dengan begitu dapat dipastikan apakah terjadi kesalahan
terhadap rangkaian catu daya atau tidak. Pengukuran ini dilakukan dengan cara
meletakkan pena positif multitester pada keluaran positif pada catu daya
sedangkan pena negatif diletakkan pada ground catu daya. Hasil dari pengukuran
tersebut dapat dilihat pada tabel 5 :
Tabel 5. Hasil Pengujian Fungsional Blok Catu Daya
Tegangan Tidak Murni
(Volt)Tegangan Hasil Pengukuran (Volt)
+8 4,91
+9 4,91
+12 4,91
Tabel 4 juga menjelaskan bahwa berapapun tegangan yang masuk kedalam
arduino maka keluarannya didalam vcc tetap yaitu 5 volt. Sehingga bila igin
menggunakan alat yang membutuhkan bertegangan lebih dari 5 volt perlu adanya
riley yang berfungsi sebangai swicth ke tegangan yang lebih besar.
4.2.1.2.2 Pengujian Blok Rangkaian Modul AVR
Pengujian rangkaian modul AVR dilakukan dengan cara melakukan
pengukuran tegangan yang dipakai oleh mikrokontroler. Cara pengukuran
dilakukan dengan multitester, pena positif diletakkan di pin 5 volt pada
mikrokontroler dan pena negatif diletakkan pada pin ground pada mikrokontroler.
Hasil pengujian dapat dilihat pada tabel 6.
Tabel 6. Hasil Pengujian Fungsional Blok Modul AVR
Tegangan Tidak Murni
(Volt)Tegangan hasil pengukuran (Volt)
+5 5
39

4.2.1.3 Pengujian Validasi
Tahap ini dilakukan dengan tujuan untuk mengetahui sistem yang dibuat
sudah bekerja dengan benar atau tidak. Dimana pengujiannya dilakukan dengan
cara melihat apakah robot dapat bergerak mengikuti cahaya yang diberikan
kepada sensor di tiga titik pada robot.
Gambar 28. Sistem Robot light follower
Pada gambar 31 sudah terlihat modul-modul yang ada telah berhubungan
dengan arduino. Dengan melakukan uji coba maka dapat dikatakan bahwa
miniatur robot light follower telah siap.
Tahap selanjutnya jika robot menerima cahaya dari sebelah kiri atau kanan
maka dia akan berbelok sesuai dengan cahaya yang diterima.
Gambar 29. Sistem robot berbelok mengikuti cahaya
Pada gambar 29 terlihat ketika robot menerima cahaya dari kiri, maka
motor kanan akan berfungsi dan motor kiri tidak berfungsi sehingga robot akan
berbelok ke arah kiri dan mengikuti cahaya. Begitupun sebaliknya, jika robot
menerima cahaa dari kanan, maka motor motor kiri akan berfungsi dan motor
kanan tidak berfungsi sehingga robot akan berbelok ke kanan. Untuk lebih
jelasnya dapat digambarkan pada table 7.
Tabel 7. Uji coba validasi pergerakan robot
Motor
Sorot Cahaya Pada
Motor
Kanan
Motor
KiriPergerakan Robot
Sensor Tengah Maju
Sensor Kanan X Belok Kanan 900
Sensor Kiri X Belok Kiri 900
Sensor Kanan dan Tengah Belok Kanan 450
40

Sensor Kiri dan Tengah Belok Kiri 450
Sensor Tengah, Kiri, dan Kanan Maju
Pada tabel 7 dapat menjelaskan pergerakan robot apabila cahaya
dipancarkan kebagian sensor. Apabila cahaya dipancarkan ke sensor bagian
tengah, maka robot akan bergerak maju, sedangkan apabila sensor kanan atau kiri
menerima cahaya, maka robot akan bergerak ke arah kanan atau kiri sebesar 900
sampai sensor kanan menerima cahaya kembali.
Robot dapat bergerak sebesar 450 ke arah kanan apabila sensor tengah dan
kanan menerima cahaya. Motor kiri akan berputar penuh sedangkan motor kanan
akan berputar lambat sehingga robot akan bergerak serong ke kanan. Begitu pula
sebaliknya apabila sensor tengah dan kiri yang menerima cahaya.
Tahap selanjutnya yaitu menentukan jarak dari cahaya yang berupa cahaya
senter dan lilin yang dipancarkan kepada sensor robot. Jarak dari cahaya yang
dipancarkan dapat dilihat pada table 8.
Tabel 8. Hasil pengujian jarak cahaya yang dipancarkan
Jarak (cm) Senter Lilin
10
20
30 X
40 X
50 X
60 X
70 X X
4.2.2 Optimasi (Optimization)
41

Pada sistem ini sudah tidak ditemukannya kendala dalam perakitan dan
keseluruhan sistem maka dapat dilakukan optimasi untuk meningkatkan performa
dari aplikasi yang telah dirancang diantaranya :
1. Robot ini dapat digunakan sebagai robot prototype yang dapat membantu
atau mempermudah pekerjaan yang tidak dapat dilakukan oleh manusia.
2. Menentukan arah dan jarak cahaya yang dipancarkan sehingga robot dapat
lebih akurat dalam mengikuti cahaya.
BAB VI
KESIMPULAN DAN SARAN
6.1 Kesimpulan
Rancang bangun robot light follower menggunakan mikrokontroler
arduino dan sensor cahaya light dependent resistor memiliki prinsip kerja yaitu
mendeteksi cahaya yang dipancarkan kepada sensor yang ditanamkan pada bagian
robot dan menghasilkan output berupa angka yang dan akan di kirim ke
mikrokontroler untuk diproses. Ketika angka mencapai batas yang ditetapkan,
42

maka mikrokontroler akan mengirimkan sinyal ke driver motor sehingga motor
akan berfungsi dan robot akan bergerak mengikuti cahaya yang dipancarkan.
Daya yang digunakan oleh robot light follower menggunakan 3 buah
baterai 9 volt. Sebuah baterai digunakan untuk konsumsi daya arduino, 3 buah
sensor LDR dan driver motor IC L298. Sementara motor DC menggunakan daya
dari 2 buah baterai yang dirangkai serial sehingga menghasilkan daya sebesar 18
volt.
Berdasarkan hasil uji validasi, cahaya yang dapat diterima oleh sensor
diantaranya cahaya matahari, lampu atau senter, api, dan infra merah. Sensor
cahaya light dependent resistor lebih peka terhadap cahaya matahari, senter dan
infra merah dibandingkan dengan cahaya api sehingga robot akan lebih cepat
bergerak apabila sensor terkena cahaya tersebut.
Robot light follower ini bisa digunakan oleh mahasiswa sebagai prototype
robot cerdas dalam pembelajaran mata kuliah robotika dan dapat dikembangkan
sehingga dapat membantu pekerjaan manusia.
6.2 Saran
Alat yang dibuat penyusun sesungguhnya masih terdapat banyak
kelemahan, baik secara fisik maupun sistem kerjanya. Oleh karena itu masih perlu
kajian – kajian dan serangkaian uji coba lagi agar diperoleh alat yang lebih
sempurna. Saran yang bisa penyusun sampaikan diantaranya Sensor LDR yang
digunakan harus lebih dari tiga dan ditempatkan di berbagai sisi robot sehingga
dapat mengikuti cahaya dari berbagai sisi.
43