perancangan sistem pengendalian kecepatan putar motor thruster pesawat tanpa awak (df-uav01) dengan...
DESCRIPTION
Jurnal Online Universitas Negeri Surabaya, author : Fitri Iskandarianto, Firman ., http://ejournal.unesa.ac.idTRANSCRIPT

1
PERANCANGAN SISTEM PENGENDALIAN KECEPATAN PUTAR MOTOR THRUSTERPESAWAT TANPA AWAK (DF-UAV01) DENGAN MODE KONTROL PROPORSIONAL
Fitri Adi Iskandarianto
Jurusan Teknik Fisika, Fakultas Teknologi Industri, ITS
Firman FahriansyahJurusan Teknik Fisika, Fakultas Teknologi Industri, ITS
Abstrak
Pengendalian motor thruster pada quadrotor DF-UAV01 merupakan pengendalian yang dilakukan untuk menjagakecepatan putar motor agar dapat mengikuti set poin dengan menggunakan rangkaian IC L293D dan mikrokontrollerATMEGA8535. Masukan set poin kecepatan motor yang harus didapatkan berasal dari reference input dari atittudecontrol. Dari data didapatkan pengendali P dengan nilai Kp=0.0279 memiliki respon yang paling baik yaitu rise timesebesar 2s dan settling time sebesar 6s. Pengendali ini diuji dengan gangguan berupa kipas angin dengan kecepatanangin sebesar 3m/s, guncangan, dan perubahan arah putaran motor secara mendadak. Dari pengujian didapatkanpengendali dapat tetap bekerja dengan baik. Sistem ini kemudian diintegrasi dengan pengendalian empat motor dansistem attitude control. Dari pengujian dapat dilihat sistem dapat membaca masukan dari range 0 – 4600 rpm dan dapatmengikuti dengan baik set poin yang diberikan oleh attitude control antara range 1500-4200 rpm.
Kata Kunci : Motor Thruster, IC L293D, quadrotor
AbstractMotor control thruster on DF-UAV01 quadrotor control is being done to keep the rotational speed of the motor to beable to follow a set of points using L293D IC circuit and microcontroller ATMEGA8535. Put the motor speed set pointsthat must be obtained from the reference input of atittude control. From the data obtained with a value of P controllerKp = 0.0279 has the best response for the rise time and settling time 2s for 6s. The controller is tested in the form of faninterference with wind speed of 3m / s, shocks, and changes in direction of motor rotation suddenly. Obtained from thetest controller can still work well. The system is then integrated with control four motors and attitude control system.From the test system can be able to read input from the range 0-4600 rpm and can follow up with a good set of pointsgiven by the attitude control between 1500-4200 rpm range.Keywords: Motor Thruster, IC L293D, quadrotor
PENDAHULUAN
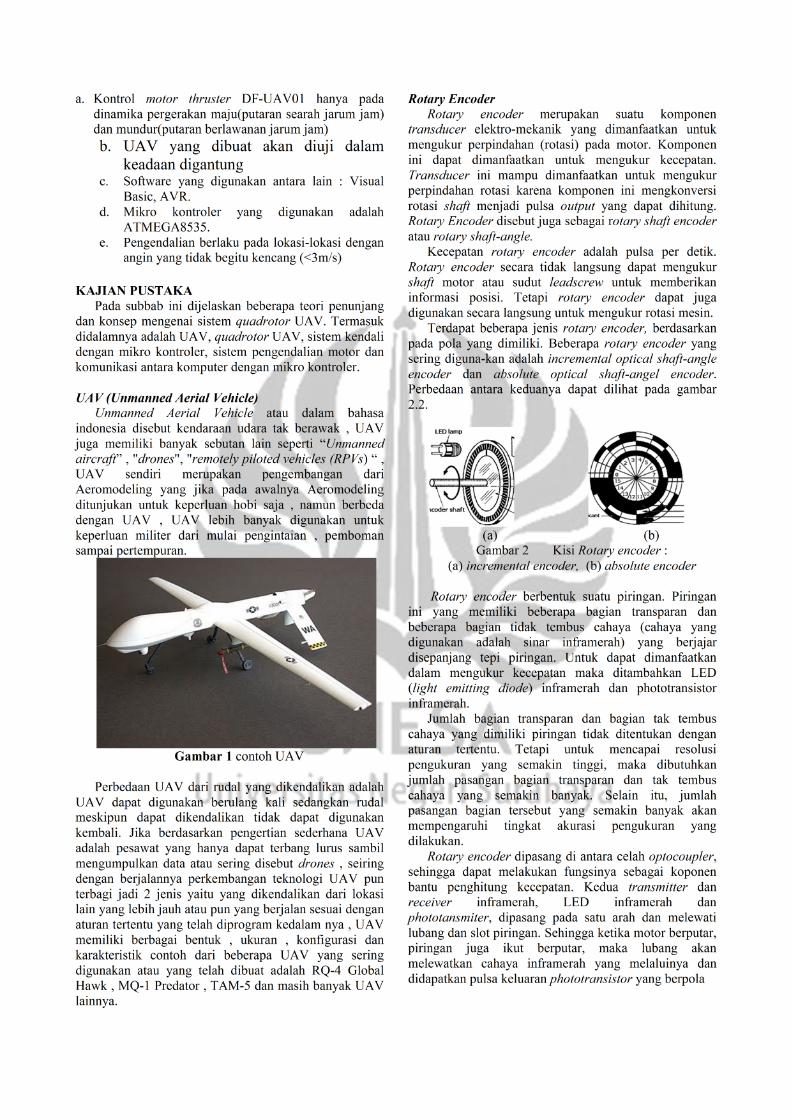
UnManned Aerial Vehicle (UAV) adalah perangkatyang memiliki kemampuan terbang tanpa awak dan pilot.Mereka dapat dikontrol secara langsung oleh operatoratau di kontrol secara otomatis melalui perangkat yang diprogram sebelumnya. Beberapa pesawat udara telah diimplementasikan pada dunia militer. Penggunaan lebihlanjut dari UAV ini pada dunia militer, secara khususdigunakan untuk mencari, operasi penyelamatan, danpengembangan UAV lainnya. Ide pembuatan quadrotorini bukanlah hal yang baru, pertama kali telahdirealisasikan pada tahun 1907 dengan nama GyroplaneNo.1 oleh Louis dan Jacques Breguet (Perancis); inimerupakan pendahulu yang sekarang digunakan untukmodel helicopter konvensional. Pengembangan lebihlanjut dari quadrotor ini pada model George de Bothezat(Dayton, Ohio) tahun 1922, oleh Etienne Oemichen(Peugeot, Perancis) tahun 1923, dan pengembanganpaling baru adalah pengembangan quadrotor dalam skalakecil dan digerakan dengan empat motor dan dapatberputar dan dikontrol secara sendiri-sendiri
kecepatannya, oleh karena itu bentuk mekanik dariquadrotor jadi semakin sederhana juga. Motor yangdigunakan adalah motor DC 5,9 volt. Pengendalian daripesawat ini berdasarkan kecepatan dari keempat motoryang saling berkaitan satu sama lain. Quadrotor secaraumum memerlukan pengendali untuk menjaga kecepatanmotor agar seimbang selama terbang.
Permasalahan yang dihadapi dalam penelitian iniadalah bagaimana membangun dan merancang sistempengendali motor thruster pada UAV DF-UAV01 denganmenggunakan mode proporsional memakai referenceinput dari attitude control. Sehingga penelitian inibertujuan untuk merancang sistem kendali pada motorthruster UAV DF-UAV01 dalam melakukan maneuver.Pada UAV tipe ini akan diberikan tambahan motor padabagian tengah quadrotor. Motor ini berfungsi untukmendorong quadrotor baik untuk maju maupun untukmundur. Dan apabila diintegrasikan dengan pengendalian4 motor dan attitude control akan dapat memperluasmaneuver yang dihasilkan.Adapun batasan masalah pada penelitian ini adalah:
transparentopaque

5
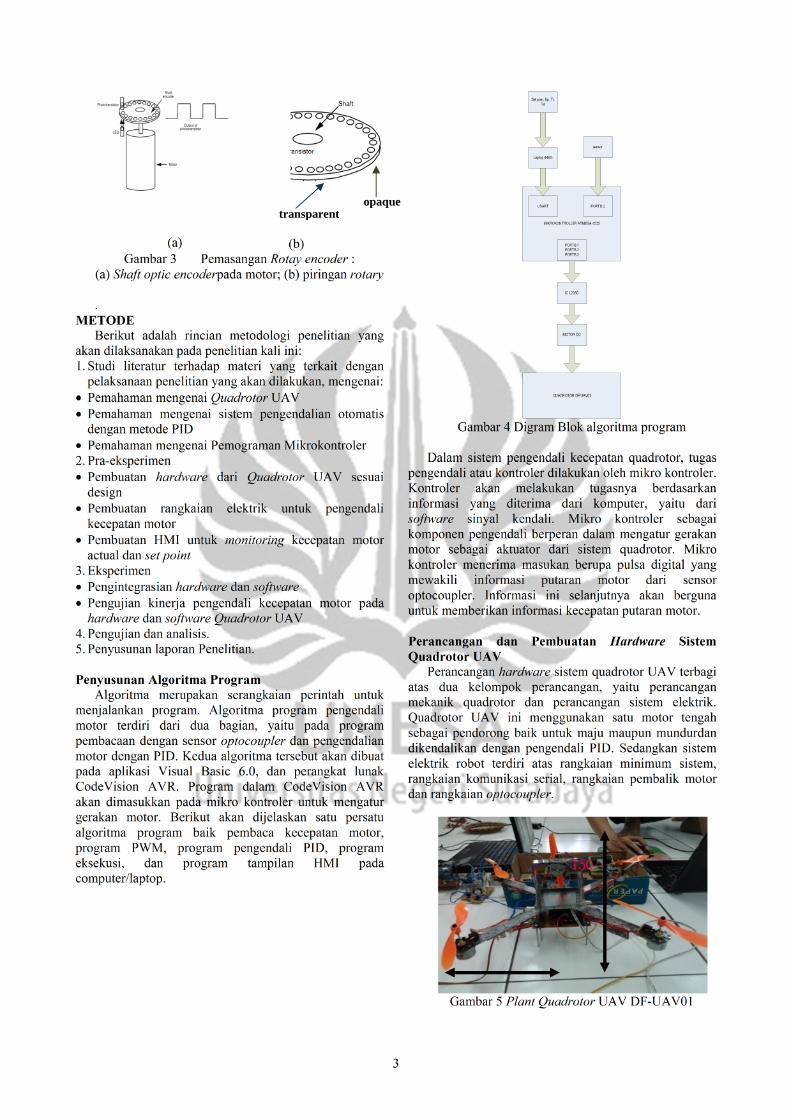
Pada gambar 3.13 diatas merupakan form HMI sistempengendali kecepatan motor pada quadrotor UAV untukmonitoring, perubahan parameter, dan respon dinamiksystem. Gambar di kanan bawah merupakan indicatorapakah pesawat dalam keadaan maju atau mundur.
HASIL DAN PEMBAHASANDari hasil penelitian didapatkan beberapa data. Data-
data ini akan dianalisa dan hasilnya sebagai berikut :Analisa Pembacaan Kecepatan Motor
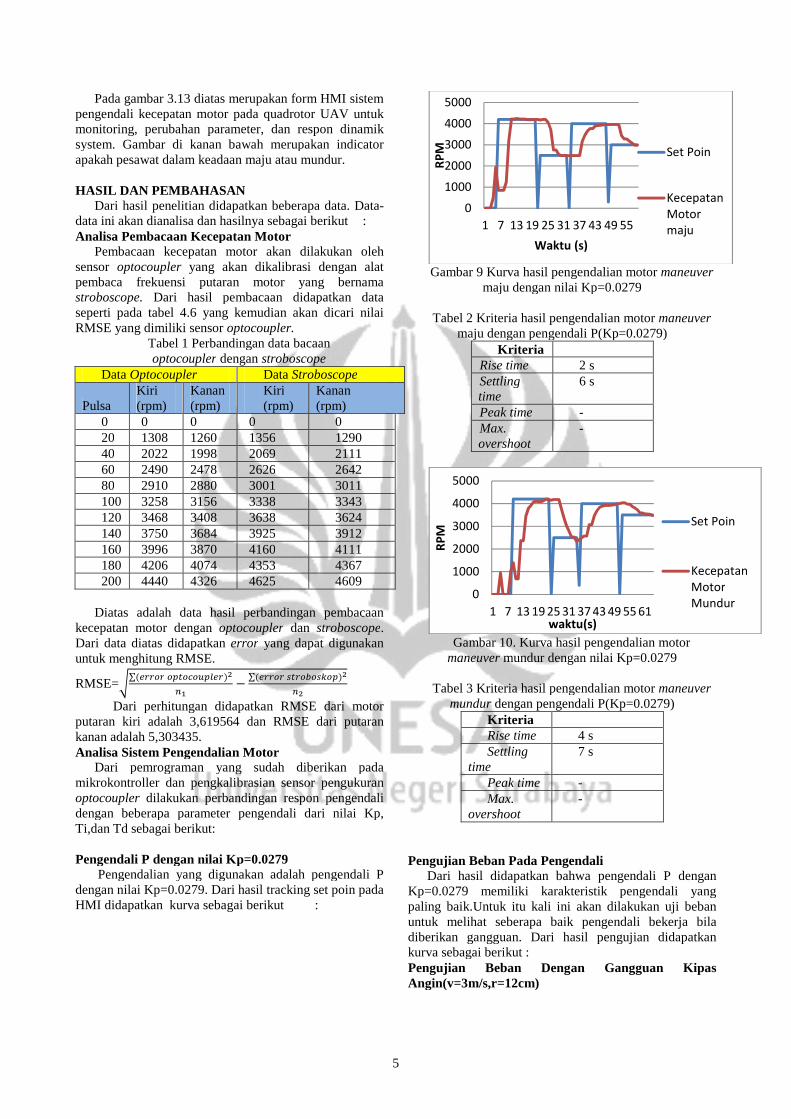
Pembacaan kecepatan motor akan dilakukan olehsensor optocoupler yang akan dikalibrasi dengan alatpembaca frekuensi putaran motor yang bernamastroboscope. Dari hasil pembacaan didapatkan dataseperti pada tabel 4.6 yang kemudian akan dicari nilaiRMSE yang dimiliki sensor optocoupler.
Tabel 1 Perbandingan data bacaanoptocoupler dengan stroboscope
Data Optocoupler Data Stroboscope
PulsaKiri(rpm)
Kanan(rpm)
Kiri(rpm)
Kanan(rpm)
0 0 0 0 020 1308 1260 1356 129040 2022 1998 2069 211160 2490 2478 2626 264280 2910 2880 3001 3011100 3258 3156 3338 3343120 3468 3408 3638 3624140 3750 3684 3925 3912160 3996 3870 4160 4111180 4206 4074 4353 4367200 4440 4326 4625 4609
Diatas adalah data hasil perbandingan pembacaankecepatan motor dengan optocoupler dan stroboscope.Dari data diatas didapatkan error yang dapat digunakanuntuk menghitung RMSE.
RMSE=ට∑(௧௨)మ
భ−
∑(௦௧௦)మ
మ
Dari perhitungan didapatkan RMSE dari motorputaran kiri adalah 3,619564 dan RMSE dari putarankanan adalah 5,303435.Analisa Sistem Pengendalian Motor
Dari pemrograman yang sudah diberikan padamikrokontroller dan pengkalibrasian sensor pengukuranoptocoupler dilakukan perbandingan respon pengendalidengan beberapa parameter pengendali dari nilai Kp,Ti,dan Td sebagai berikut:
Pengendali P dengan nilai Kp=0.0279Pengendalian yang digunakan adalah pengendali P
dengan nilai Kp=0.0279. Dari hasil tracking set poin padaHMI didapatkan kurva sebagai berikut :
Gambar 9 Kurva hasil pengendalian motor maneuvermaju dengan nilai Kp=0.0279
Tabel 2 Kriteria hasil pengendalian motor maneuvermaju dengan pengendali P(Kp=0.0279)
KriteriaRise time 2 sSettlingtime
6 s
Peak time -Max.overshoot
-
Gambar 10. Kurva hasil pengendalian motormaneuver mundur dengan nilai Kp=0.0279
Tabel 3 Kriteria hasil pengendalian motor maneuvermundur dengan pengendali P(Kp=0.0279)
KriteriaRise time 4 sSettling
time7 s
Peak time -Max.
overshoot-
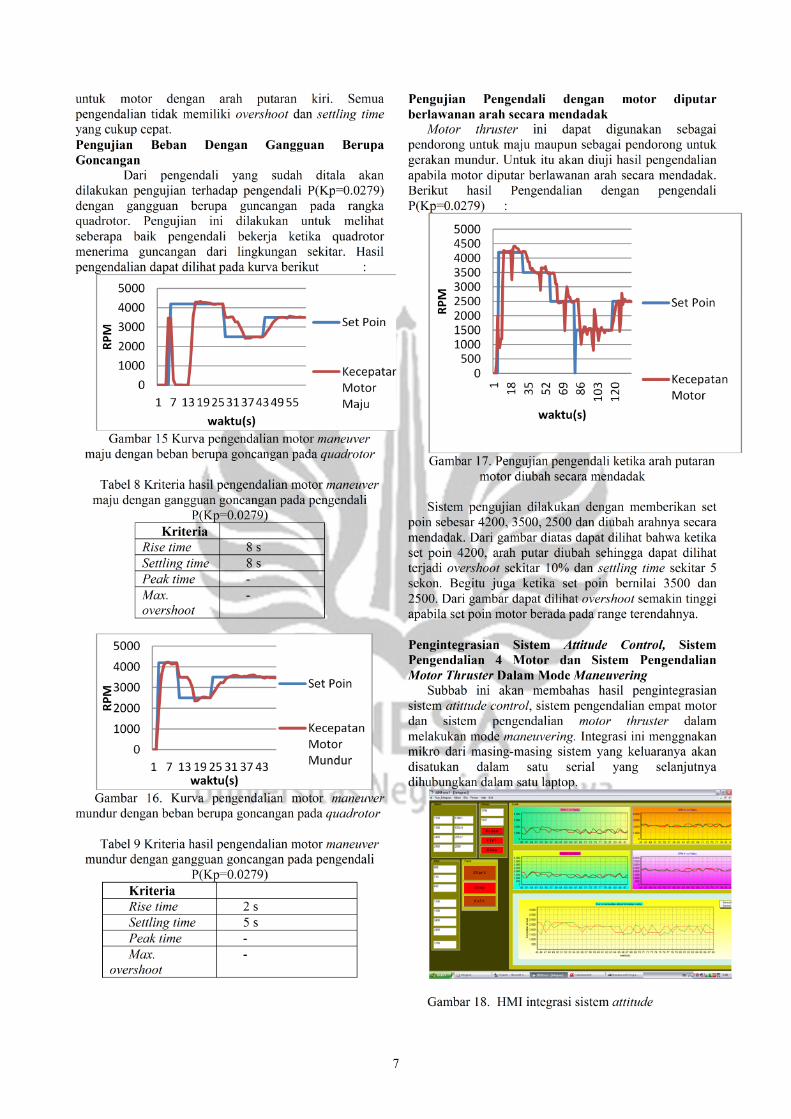
Pengujian Beban Pada PengendaliDari hasil didapatkan bahwa pengendali P dengan
Kp=0.0279 memiliki karakteristik pengendali yangpaling baik.Untuk itu kali ini akan dilakukan uji bebanuntuk melihat seberapa baik pengendali bekerja biladiberikan gangguan. Dari hasil pengujian didapatkankurva sebagai berikut :Pengujian Beban Dengan Gangguan KipasAngin(v=3m/s,r=12cm)
0
1000
2000
3000
4000
5000
1 7 13 19 25 31 37 43 49 55
RP
M
Waktu (s)
Set Poin
KecepatanMotormaju
0
1000
2000
3000
4000
5000
1 7 13 19 25 31 37 43 49 55 61
RP
M
waktu(s)
Set Poin
KecepatanMotorMundur

Gambar 11 Kurva pengendalian motor maneuvermaju dengan beban kipas angin pada bagian depan \
Tabel 4 Kriteria hasil pengendalian motor maneuvermaju dengan gangguan kipas angin depan pada
pengendali P(Kp=0.0279)KriteriaRise time 4 sSettling
time10 s
Peak time -Max.
overshoot-
Gambar 12 Kurva pengendalian motor maneuvermundur dengan beban kipas angin pada bagian depan
quadrotorTabel 5 Kriteria hasil pengendalian motor kiri dengan
gangguan kipas angin depan pada pengendaliP(Kp=0.0279)
Kriteria
Rise time 4 s
Settling time 6 s
Peak time -
Max.overshoot
-
Gambar 13 Kurva pengendalian motor maneuvermaju dengan beban kipas angin pada bagian belakang
quadrotorTabel 6 Kriteria hasil pengendalian motor maneuver
maju dengan gangguan kipas angin belakang padapengendali P(Kp=0.0279)
Kriteria
Rise time 2 s
Settlingtime
13 s
Peak time 2 s
Max.overshoot
8,14 %
Gambar 14. Kurva pengendalian motor maneuvermundur dengan beban kipas angin pada bagian belakang
quadrotorTabel 7 Kriteria hasil pengendalian motor maneuver
mundur dengan gangguan kipas angin belakag padapengendali P(Kp=0.0279)Kriteria
Rise time 5 s
Settling time 7 s
Peak time -
Max.overshoot
-
Pada gambar dapat dilihat kurva hasilpengendalian dengan pengendali P(Kp=0.0279) dapatdengan baik mengikuti set poin ketika diubah secaramendadak walaupun diberikan gangguan berupa angindari kipas angin dengan kecepatan 3m/s baik dari arahdepan maupun dari arah belakang quadrotor untukpengendalian motor untuk arah putaran kanan maupun
0
1000
2000
3000
4000
5000
1 12 23 34 45 56 67 78 89
RP
M
waktu(s)
set poin
kecepatanmotor Maju
0
1000
2000
3000
4000
5000
1 8 15 22 29 36 43 50 57 64
RP
M
waktu(s)
set poin
kecepatanmotorMundur
0
1000
2000
3000
4000
5000
1 7 131925313743495561
RP
M
waktu(s)
Set Poin
kecepatanmotorMaju
0
1000
2000
3000
4000
5000
1 8 15222936435057
RP
M
waktu(s)
Set Poin
KecepatanMotorMundur
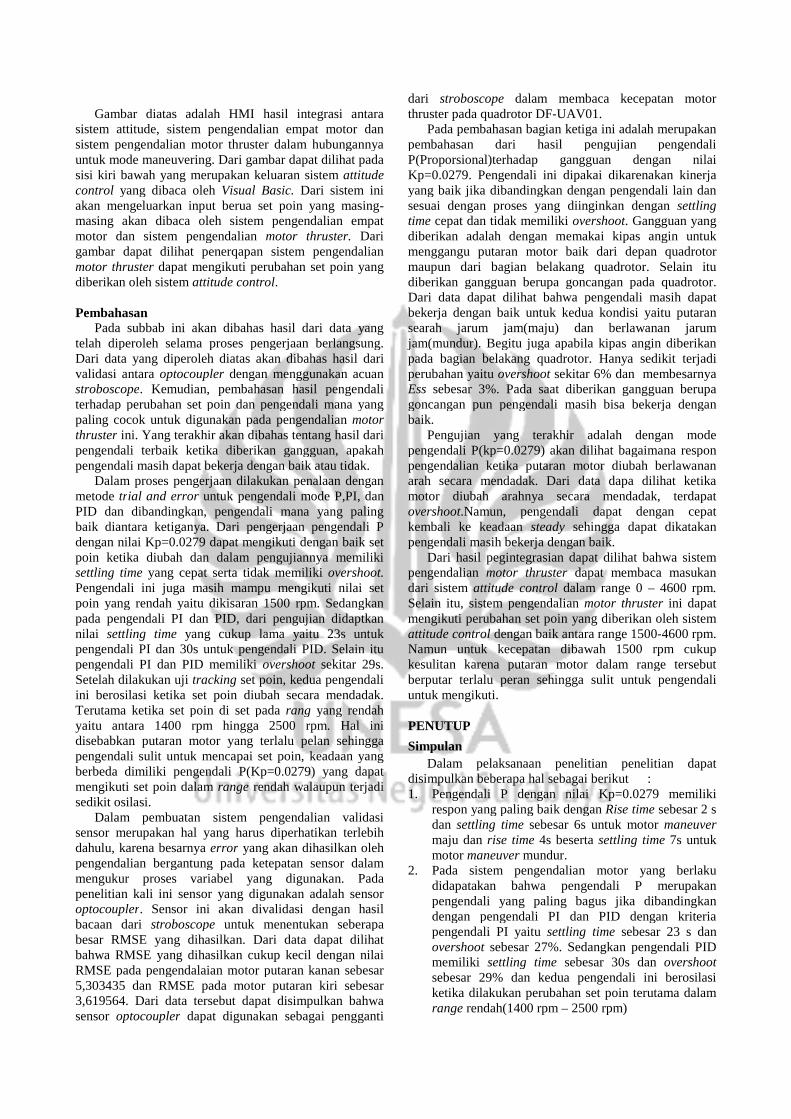
Gambar diatas adalah HMI hasil integrasi antarasistem attitude, sistem pengendalian empat motor dansistem pengendalian motor thruster dalam hubungannyauntuk mode maneuvering. Dari gambar dapat dilihat padasisi kiri bawah yang merupakan keluaran sistem attitudecontrol yang dibaca oleh Visual Basic. Dari sistem iniakan mengeluarkan input berua set poin yang masing-masing akan dibaca oleh sistem pengendalian empatmotor dan sistem pengendalian motor thruster. Darigambar dapat dilihat penerqapan sistem pengendalianmotor thruster dapat mengikuti perubahan set poin yangdiberikan oleh sistem attitude control.
PembahasanPada subbab ini akan dibahas hasil dari data yang
telah diperoleh selama proses pengerjaan berlangsung.Dari data yang diperoleh diatas akan dibahas hasil darivalidasi antara optocoupler dengan menggunakan acuanstroboscope. Kemudian, pembahasan hasil pengendaliterhadap perubahan set poin dan pengendali mana yangpaling cocok untuk digunakan pada pengendalian motorthruster ini. Yang terakhir akan dibahas tentang hasil daripengendali terbaik ketika diberikan gangguan, apakahpengendali masih dapat bekerja dengan baik atau tidak.
Dalam proses pengerjaan dilakukan penalaan denganmetode trial and error untuk pengendali mode P,PI, danPID dan dibandingkan, pengendali mana yang palingbaik diantara ketiganya. Dari pengerjaan pengendali Pdengan nilai Kp=0.0279 dapat mengikuti dengan baik setpoin ketika diubah dan dalam pengujiannya memilikisettling time yang cepat serta tidak memiliki overshoot.Pengendali ini juga masih mampu mengikuti nilai setpoin yang rendah yaitu dikisaran 1500 rpm. Sedangkanpada pengendali PI dan PID, dari pengujian didaptkannilai settling time yang cukup lama yaitu 23s untukpengendali PI dan 30s untuk pengendali PID. Selain itupengendali PI dan PID memiliki overshoot sekitar 29s.Setelah dilakukan uji tracking set poin, kedua pengendaliini berosilasi ketika set poin diubah secara mendadak.Terutama ketika set poin di set pada rang yang rendahyaitu antara 1400 rpm hingga 2500 rpm. Hal inidisebabkan putaran motor yang terlalu pelan sehinggapengendali sulit untuk mencapai set poin, keadaan yangberbeda dimiliki pengendali P(Kp=0.0279) yang dapatmengikuti set poin dalam range rendah walaupun terjadisedikit osilasi.
Dalam pembuatan sistem pengendalian validasisensor merupakan hal yang harus diperhatikan terlebihdahulu, karena besarnya error yang akan dihasilkan olehpengendalian bergantung pada ketepatan sensor dalammengukur proses variabel yang digunakan. Padapenelitian kali ini sensor yang digunakan adalah sensoroptocoupler. Sensor ini akan divalidasi dengan hasilbacaan dari stroboscope untuk menentukan seberapabesar RMSE yang dihasilkan. Dari data dapat dilihatbahwa RMSE yang dihasilkan cukup kecil dengan nilaiRMSE pada pengendalaian motor putaran kanan sebesar5,303435 dan RMSE pada motor putaran kiri sebesar3,619564. Dari data tersebut dapat disimpulkan bahwasensor optocoupler dapat digunakan sebagai pengganti
dari stroboscope dalam membaca kecepatan motorthruster pada quadrotor DF-UAV01.
Pada pembahasan bagian ketiga ini adalah merupakanpembahasan dari hasil pengujian pengendaliP(Proporsional)terhadap gangguan dengan nilaiKp=0.0279. Pengendali ini dipakai dikarenakan kinerjayang baik jika dibandingkan dengan pengendali lain dansesuai dengan proses yang diinginkan dengan settlingtime cepat dan tidak memiliki overshoot. Gangguan yangdiberikan adalah dengan memakai kipas angin untukmenggangu putaran motor baik dari depan quadrotormaupun dari bagian belakang quadrotor. Selain itudiberikan gangguan berupa goncangan pada quadrotor.Dari data dapat dilihat bahwa pengendali masih dapatbekerja dengan baik untuk kedua kondisi yaitu putaransearah jarum jam(maju) dan berlawanan jarumjam(mundur). Begitu juga apabila kipas angin diberikanpada bagian belakang quadrotor. Hanya sedikit terjadiperubahan yaitu overshoot sekitar 6% dan membesarnyaEss sebesar 3%. Pada saat diberikan gangguan berupagoncangan pun pengendali masih bisa bekerja denganbaik.
Pengujian yang terakhir adalah dengan modepengendali P(kp=0.0279) akan dilihat bagaimana responpengendalian ketika putaran motor diubah berlawananarah secara mendadak. Dari data dapa dilihat ketikamotor diubah arahnya secara mendadak, terdapatovershoot.Namun, pengendali dapat dengan cepatkembali ke keadaan steady sehingga dapat dikatakanpengendali masih bekerja dengan baik.
Dari hasil pegintegrasian dapat dilihat bahwa sistempengendalian motor thruster dapat membaca masukandari sistem attitude control dalam range 0 – 4600 rpm.Selain itu, sistem pengendalian motor thruster ini dapatmengikuti perubahan set poin yang diberikan oleh sistemattitude control dengan baik antara range 1500-4600 rpm.Namun untuk kecepatan dibawah 1500 rpm cukupkesulitan karena putaran motor dalam range tersebutberputar terlalu peran sehingga sulit untuk pengendaliuntuk mengikuti.
PENUTUP
Simpulan
Dalam pelaksanaan penelitian penelitian dapatdisimpulkan beberapa hal sebagai berikut :1. Pengendali P dengan nilai Kp=0.0279 memiliki
respon yang paling baik dengan Rise time sebesar 2 sdan settling time sebesar 6s untuk motor maneuvermaju dan rise time 4s beserta settling time 7s untukmotor maneuver mundur.
2. Pada sistem pengendalian motor yang berlakudidapatakan bahwa pengendali P merupakanpengendali yang paling bagus jika dibandingkandengan pengendali PI dan PID dengan kriteriapengendali PI yaitu settling time sebesar 23 s danovershoot sebesar 27%. Sedangkan pengendali PIDmemiliki settling time sebesar 30s dan overshootsebesar 29% dan kedua pengendali ini berosilasiketika dilakukan perubahan set poin terutama dalamrange rendah(1400 rpm – 2500 rpm)
9
3. Pengendali P dengan nilai Kp=0.0279 dapat berjalandengan baik ketika diberikan gangguan berupagoncangan dan gangguan kipas angin(v=3m/s) padabagian depan maupun belakang quadrotor.
4. Pengendali P dengan nilai Kp=0..0279 dapat bekerjadengan baik ketika arah putaran motor diubah secaramendadak dengan overshoot 8% dan settling timesebesar 4s.
5. Sistem pengendalian motor thruster terintegrasidapat membaca masukan set poin dengan range 0 –4600 rpm dan dapat mengikuti perubahan set poindengan baik ketika diintegrasikan dengan sistemattitude control dan sistem pengendalian empatmotor pada range 1500-4600 rpm.
SaranTerdapat beberapa saran yang dapat diberikan setelah
melakukan penelitian penelitian ini antara lain1. Motor dc yang sebaiknya digunakan adalah brushless
dc motor, rangkaian ESC (Electronic Speed Control)yang menggunakan ESC pada Radio Control, danmenggunakan software LabView untukmempermudah proses koneksi antara hardware dansoftware dengan menggunakan NI-DAQ (NationalInstrument- Data Acquisition)
2. baling-baling yang digunakan sesuai dengan brushlessdc motor dengan berat seringan mungkin namunmemiliki nilai rpm yang tinggi.
3. Pembuatan rangka quadrotor diharapkan dapat lebihdiringankan namun masih stabil dan kuat untukmemudahkan BDC dalam memberikan gaya angkat.
DAFTAR PUSTAKA
Ariefianto, Budi.2008.”Training MicrocontrollerATMEGA 8535 for Beginner”.Maxtron
Domingues ,Jorge Miguel Brito, “Quadrotor prototype”,Instituto Superior Tecnico
Electro Control team, “Driver Motor DC menggunakanIC L293 D”,www.electrocontrol.wordpress.com
Emanuel Stingu, frank Lewis,”Quadrotor Spesification”,Automation & Robotics Research Institute Universityof Texas at Arlington
Elliot, Grant,2005,” Development of an AutonomousQuadrotor Flying Platform”
Firdaus ,Ahmad Riyad, “SISTEM KENDALIKECEPATAN MOTOR DC”, Politeknik Batam
Haomiao Huang, Gabriel M. Hoffman, Steven L.Waslander, Claire J. Tomlin, “Aerodynamics andControl of Autonomous Quadrotor Helicopters inAggressive Maneuvering
McComb , Gordon.2001.the robot builder’s(2nd edition)bonzana.MacGraw-Hill
Ogata, Katsuhiko. 1993.”Teknik KontrolAutomatik(Sistem Pengukuran)”.Jakarta:Erlangga
Risqiawan, Awindra.2009.” Sekilas RotaryEncoder”.Penelitian Energi Listrik Elektro ITB
S. Bouabdallah, “Design and control of quadrotors withapplication to autonomous flying,” Ph.D. dissertation,EPFL, 2006
Sadin , Paul E..2003.robot mechanism and mechanicaldevice ilustrated.mc graw-hill : new york
Simanjutak , Raymond T.,2008, “Perancangan RobotPemadam Api Berbasis MIKROKONTROLLERAT89C51