modifikasi sistem navigasi otomatis pengendalian … · sistem kemudi otomatis pada traktor...
TRANSCRIPT
i
MODIFIKASI SISTEM NAVIGASI OTOMATIS
PENGENDALIAN TRAKTOR UNTUK PENGOLAHAN
LAHAN KERING
ANDREAS GONZALES LEPA RATU
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
2014
ii
iii
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul ―Modifikasi Sistem
Navigasi Otomatis Pengendalian Traktor Untuk Pengolahan Lahan Kering‖
adalah benar karya saya dengan arahan dari komisi pembimbing dan belum
diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber
informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak
diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam
Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut
Pertanian Bogor.
Bogor, Januari 2014
Andreas Gonzales Lepa Ratu
NIM F14090131
iv
ABSTRAK
ANDREAS GONZALES LEPA RATU. Modifikasi Sistem Navigasi Otomatis
Pengendalian Traktor Untuk Pengolahan Lahan Kering. Dibimbing oleh I DEWA
MADE SUBRATA.
Penelitian ini merupakan penelitian lanjutan mengenai pengembangan
sistem kemudi otomatis pada traktor pertanian menggunakan navigasi GPS
(Rahman, 2013). Tujuan dari penelitian ini adalah menyempurnakan algoritme
dari penelitian sebelumnya (Rahman, 2013) untuk navigasi otomatis mengikuti
jalur pengolahan lahan kering. Pengujian lapangan dilakukan dalam dua tahap
yaitu uji lintasan lurus tanpa menggunakan implemen dan uji kinerja pengolahan
lahan dengan menggunakan implemen bajak rotari. Hasil dari uji lintasan lurus
tanpa perubahan komponen mekanik dan tanpa menggunakan implemen
menunjukkan simpangan rata-rata 8.62 cm dan simpangan terbesar 16.77 cm,
hasil ini lebih baik dari hasil uji penelitian Rahman (2013) karena simpangan rata-
rata menurun 28.17%. Pengoperasian dengan menggunakan implemen mengikuti
jalu pengolahan lahan kering menghasilkan simpangan rata-rata pada lintasan
lurus adalah 6.9 cm dan simpangan terbesar 31.64 cm, hasil ini menunjukkan
bahwa simpangan rata-rata menurun 61.45% dari hasil penelitian Rahman (2013).
Dalam penelitian ini dikembangkan mekanisme baru yaitu mekanisme transmisi
maju mundur untuk mendukung pergerakan traktor mengikuti jalur pengolahan
lahan kering dan pemisahan mekanisme rem kanan dan kiri dengan hasil kinerja
radius putar 1.5 m.
Kata kunci: algoritme, navigasi otomatis, traktor.
ABSTRACT
ANDREAS GONZALES LEPA RATU. Modification of Automatic Navigation
System On Controlling Tractor For Dry Land Tillage. Supervised by I DEWA
MADE SUBRATA.
This is the advanced research concerning to the development of automatic
steering system on tractor with Global Positioning System navigation (Rahman,
2013). The purpose of this research is to improve algoritm from the previous
research (Rahman, 2013) for the automatic navigation following the dry land
tilling trajectory. The field test has been carried out in two steps, they are test of
straight line without using implement and dry land tilling test using rotary tiller.
Result of the straight line test without any mechanical component changes and
without using implement, shows the average error 8.62 cm and maximum error
16.77 cm, this result is much better than the previous one by Rahman (2013)
because of 28.17% average error decrease. Operation by rotary tiller following the
dry land tilling trajectory produces the average error of straight line 6.9 cm and
maximum error 31.64 cm, this result shows that the average error has 61.45%
decrease compared to Rahman’s research (2013). In this research, it has been
developed a new mechanisms of onwards and backwards transmition to support

v
the tractor movement following the new trajectory and to separate the right and
left brake mechanism which the work result of 1.5 m turning radius.
Keywords : algoritm, automatic navigation, tractor.
vi
vii
Skripsi
sebagai salah satu syarat untuk memperoleh gelar
Sarjana Teknologi Pertanian
pada
Departemen Teknik Mesin dan Biosistem
MODIFIKASI SISTEM NAVIGASI OTOMATIS
PENGENDALIAN TRAKTOR UNTUK PENGOLAHAN
LAHAN KERING
ANDREAS GONZALES LEPA RATU
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
2014
viii
ix
Judul Skripsi : Modifikasi Sistem Navigasi Otomatis Pengendalian Traktor Untuk
Pengolahan Lahan Kering
Nama : Andreas Gonzales Lepa Ratu
NIM : F14090131
Disetujui oleh
Dr. Ir. I Dewa Made Subrata, M.Agr
Pembimbing
Diketahui oleh
Dr. Ir. Desrial, M.Eng
Ketua Departemen
Tanggal Lulus:
x
PRAKATA
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala
karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih
dalam penelitian yang dilaksanakan sejak bulan Februari 2013 ini ialah
modifikasi, dengan judul ―Modifikasi Sistem Navigasi Otomatis Pengendalian
Traktor Untuk Pengolahan Lahan Kering‖.
Terima kasih penulis ucapkan kepada Bapak Dr Ir I Dewa Made Subrata
MAgr selaku pembimbing serta M. Sigit Gunawan dan Setya Permana selaku
rekan tim penelitian. Ungkapan terima kasih juga disampaikan kepada Fransiskus
Xaverius Immanuel Lepa selaku ayah, Erry Pantjawatie, bfl selaku ibu, kedua
adik: Ezra Maria Brigitta Lepa Ratu dan Grace Eve Felicia Lepa Ratu, seluruh
keluarga, Stephani Utari, Ferry Albert Gideon Rihi, Friska Vida, Anggi Maniur,
Lita Hidayati, Zarmeis Sri Mulyati, Nabillah Hafidzati, staf pekerja di
Laboratorium Lapang Siswadhi Supardjo dan Laboratorium Instrumentasi dan
Kontrol serta setiap pihak yang ikut membantu, atas segala doa dan kasih
sayangnya.
Semoga karya ilmiah ini bermanfaat.
Bogor, Januari 2014
Andreas Gonzales Lepa Ratu
xi
DAFTAR ISI
DAFTAR TABEL xii
DAFTAR GAMBAR xii
DAFTAR LAMPIRAN xii
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 1
Tujuan Penelitian 1
METODE 2
Waktu Dan Tempat 2
Alat dan Bahan 2
Tahapan Penelitian 3
Prosedur Pengujian 3
Rancangan Sistem 5
HASIL DAN PEMBAHASAN 14
Pembahasan 14
SIMPULAN DAN SARAN 22
Simpulan 22
Saran 22
DAFTAR PUSTAKA 23
LAMPIRAN 24
RIWAYAT HIDUP 26
xii
DAFTAR TABEL
1. Penentuan sudut roda traktor 7 2. Simpangan hasil uji kinerja lintasan lurus tanpa menggunakan
implemen 16 3. Simpangan hasil pengujian sistem navigasi lintasan lurus (Rahman,
2013) 16 4. Simpangan hasil pengolahan dengan bajak rotari 20 5. Simpangan hasil berdasarkan pengukuran setelah mencapai jalur acuan 21
DAFTAR GAMBAR
1. Bagan alir proses penelitian 3 2. Layout jalur pengujian 4 3. Layout jalur pengujian penelitian sebelumnya (Rahman, 2013) 5 4. Algoritme pembentukan lintasan olah 7 5. Sketsa penentuan lintasan olah 8 6. Diagram alir umum sistem kontrol navigasi otomatis 9 7. Rincian diagram alir kontrol pergerakan maju 10 8. Rincian diagram alir umum kontrol operasi balik kiri 11 9. Rincian diagram alir umum kontrol operasi balik kanan 11 10. Rincian diagram alir umum kontrol operasi mundur 12 11. Algoritme pengolahan data GPS (Rahman, 2013) 13
12. Pemrograman dengan Code Vision AVR 14 13. Pemrograman dengan Visual Basic 14 14. Tampilan ketika sistem dijalankan 15 15. Hasil uji lintasan lurus tanpa menggunakan implemen 15 16. Pengujian lintasan lurus dengan penggunaan simpangan awal 17 17. Kondisi lahan sebelum diolah dengan bajak rotari 18
18. Kondisi lahan hasil pengolahan dengan bajak rotari 18 19. Hasil uji kinerja dengan menggunakan bajak rotari 19 20. Acuan pengukuran simpangan pada setiap lintasan 20 21. Acuan pengukuran simpangan setelah mencapai jalur acuan 21
DAFTAR LAMPIRAN
1. Hasil pengukuran kadar air tanah untuk pengujian tanpa menggunakan
implemen 24 2. Hasil pengukuran kadar air tanah untuk pengujian menggunakan
implemen bajak rotari 24
1
PENDAHULUAN
Latar Belakang
Pengembangan otomasi traktor pertanian di Indonesia dalam mendukung
kegiatan pertanian presisi masih menjadi hal yang sangat baru untuk masyarakat
Indonesia. Pada penelitian ini, otomasi yang dilakukan adalah dengan menerapkan
sistem navigasi otomatis dengan bantuan GPS (Global Positioning System) pada
pengolahan tanah dengan menggunakan traktor roda empat.
Penelitian ini merupakan penelitian lanjutan mengenai rancang bangun
sistem kemudi otomatis traktor pertanian berbasis GPS (Rahman, 2013). Pada
hasil uji kinerja penelitian tersebut didapatkan radius belok yang cukup besar
karena tidak adanya pemisahan sistem kontrol pada mekanisme rem untuk
membantu pergerakan belok serta algoritme penentuan aksi traktor yang perlu
dikembangkan agar simpangan yang dihasilkan menjadi lebih kecil.
Penelitian ini menguraikan penerapan algoritme yang digunakan untuk
mendukung sistem navigasi otomatis pergerakan traktor mengikuti jalur olah
lahan dan menguji hasil pengembangan algoritme yang telah dibangun secara uji
kinerja lapangan.
Perumusan Masalah
Pada hasil uji lapangan dari penelitian Rahman (2013) radius putar traktor
masih sangat besar dan penentuan pergerakan traktor yang masih kurang akurat.
Dalam hal ini ditemukan salah satu solusi yang akan dijadikan modifikasi, yaitu
pemisahan mekanisme rem kanan dan kiri serta penambahan mekanisme transmisi
maju dan mundur untuk mendukung pergerakan traktor dalam melakukan
kegiatan pengolahan lahan. Untuk menjalankan mekanisme tersebut diperlukan
algoritme sebagai perintah agar dapat berjalan dengan baik dan dipadukan dengan
mekanisme lain yang sudah ada sehingga membuat traktor dapat beroperasi lebih
baik. Penyempurnaan algoritme dilakukan pada penentuan gerakan koreksi traktor
terhadap jalur acuan agar traktor bisa beroperasi lebih akurat. Pengembangan
algoritme dilakukan pada penentuan jalur olah yang baru, sehingga pengguna
memiliki beberapa pilihan untuk melakukan pengolahan lahan. Pengembangan
algoritme pada sistem kemudi otomatis berbasis navigasi GPS pada traktor
diharapkan mampu meningkatkan ketelitian traktor dalam proses budidaya
pertanian.
Tujuan Penelitian
Penelitian ini bertujuan untuk menyempurnakan dan mengembangkan
algoritme baru dari penelitian sebelumnya (Rahman, 2013) untuk navigasi
otomatis traktor mengikuti jalur pengolahan lahan kering baru.
2
METODE
Waktu Dan Tempat
Penelitian ini dilaksanakan di Laboratorim Instrumentasi dan Kontrol dan
Laboratorium Lapang Siswadi Supardjo, Departemen Teknik Mesin dan
Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor, pada bulan
Februari sampai Nopember 2013.
Alat dan Bahan
Alat yang digunakan pada penelitian ini adalah komputer pengendali
(laptop), RTK-DGPS Outback®
S3 GPS Guidance and Mapping System/ penentu
posisi traktor, trasktor Yanmar EF 453T, patok, meteran, penetrometer, ring
sampel, oven dan timbangan, serta perangkat lunak Microsoft Visual Basic 6.0
dan Code Vision AVR.
3
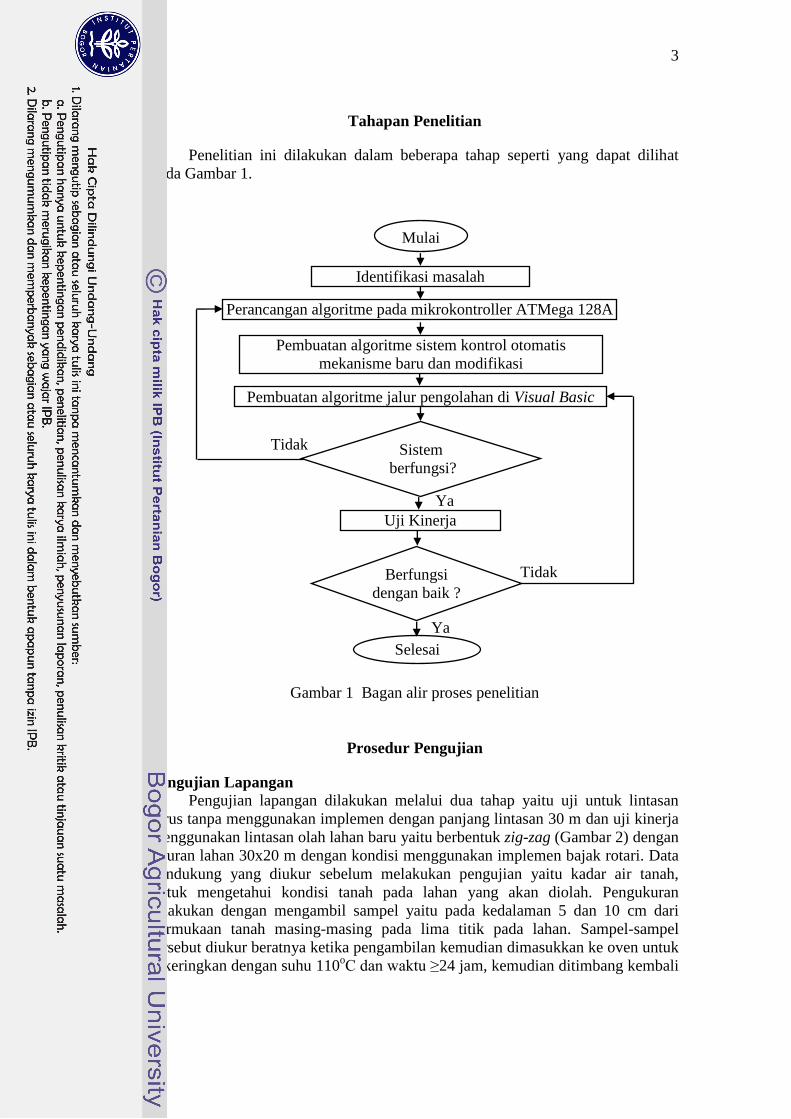
Tahapan Penelitian
Penelitian ini dilakukan dalam beberapa tahap seperti yang dapat dilihat
pada Gambar 1.
Gambar 1 Bagan alir proses penelitian
Prosedur Pengujian
Pengujian Lapangan
Pengujian lapangan dilakukan melalui dua tahap yaitu uji untuk lintasan
lurus tanpa menggunakan implemen dengan panjang lintasan 30 m dan uji kinerja
menggunakan lintasan olah lahan baru yaitu berbentuk zig-zag (Gambar 2) dengan
ukuran lahan 30x20 m dengan kondisi menggunakan implemen bajak rotari. Data
pendukung yang diukur sebelum melakukan pengujian yaitu kadar air tanah,
untuk mengetahui kondisi tanah pada lahan yang akan diolah. Pengukuran
dilakukan dengan mengambil sampel yaitu pada kedalaman 5 dan 10 cm dari
permukaan tanah masing-masing pada lima titik pada lahan. Sampel-sampel
tersebut diukur beratnya ketika pengambilan kemudian dimasukkan ke oven untuk
dikeringkan dengan suhu 110oC dan waktu ≥24 jam, kemudian ditimbang kembali
Mulai
Identifikasi masalah
Perancangan algoritme pada mikrokontroller ATMega 128A
Pembuatan algoritme sistem kontrol otomatis
mekanisme baru dan modifikasi
Sistem
berfungsi?
Uji Kinerja
Berfungsi
dengan baik ?
Selesai
Pembuatan algoritme jalur pengolahan di Visual Basic
Ya
Tidak
Tidak
Ya

4
setelah keluar dari oven. Berdasarkan data tersebut dapat dihitung kadar air tanah
dengan persamaan (1).
.................................................................. (1)
Keterangan :
Ka = kadar air (%)
mtb = berat basah (gram)
mtk = berat kering (gram)
mr = berat ring sampel (gram)
Kemudian, seluruh sistem dan perangkat GPS, yang berada di traktor
maupun di base line dipastikan sudah terpasang dengan baik. Kemudian traktor
dikendarai secara manual menuju titik awal pengujian. Langkah awal yang harus
dilakukan adalah menyalakan Base LineX kemudian S3 Console, dimana konsol
GPS akan melakukan koneksi ke Base Line hingga mencapai kondisi RTK.
Selanjutnya adalah menghidupkan rangkaian mekatronika, lalu sistem melakukan
koneksi ke mikrokontroler dan proses pengujian pun dapat dilakukan. Layout jalur
pengujian dapat dilihat pada Gambar 2 dan dapat dibandingkan dengan layout
jalur pengujian pada penelitian sebelumnya pada Gambar 3. Pengolahan
dilakukan dari selatan ke utara.
Beberapa sistem pada traktor yang harus diatur secara manual sebelum
pengujian adalah posisi gigi yaitu low (1) dengan kecepatan medium (2) serta
kondisi traktor menggunakan sistem 4WD (four wheel drive) dan tuas PTO dalam
keadaan menyambung (hanya ketika menggunakan bajak rotari). Untuk pengujian
lapangan, sistem telah diatur untuk menggunakan kecepatan 2200 rpm.
Gambar 2 Layout jalur pengujian
U
Selesai Mula
i
S

5
Gambar 3 Layout jalur pengujian penelitian sebelumnya (Rahman, 2013)
Parameter uji yang diukur adalah besar simpangan terbesar dan rata-rata
yang terjadi pada setiap lintasan terhadap jalur acuan yang telah ditentukan serta
waktu rata-rata yang ditempuh untuk lintasan lurus, belok dan mundur.
Rancangan Sistem
Sistem Pembacaan Dan Pengolahan Data GPS
Data yang didapatkan dari GPS berupa data geodetik berbentuk besaran
sudut bujur (longitude) dan lintang (latitude). Selanjutnya sistem akan membuat
setiap jalur berdasarkan input data 4 titik koordinat pojok lahan olah yang sudah
disimpan. Awal pengolahan akan dilakukan dari selatan ke utara. Dalam
pembentukan jalur, besaran latitude dan longitude tidak perlu dikonversikan ke
dalam bentuk koordinat x dan y. Parameter-parameter lintasan yang dihitung
adalah 2 titik ujung lintasan dan sudut orientasi lintasan.
Tahap selanjutnya adalah menghitung Δlatitude dan Δlongitude maksimum
dari masing-masing titik yang berhadapan, dengan persamaan berikut (Rahman,
2013):
............................................................. (2)
.................................................... (3)
............................................................. (4)
.................................................... (5)
U
S

6
Berdasarkan masing-masing delta yang ada, dihitung lebar olah lahan (l)
dengan menggunakan persamaan berikut (Rahman , 2013):
....
.............................................................................................................................. (6)
Dari persamaan (5), dipilih besaran yang terkecil sebagai lebar olah lahan.
Berdasarkan lebar lahan yang ada ditentukan jumlah jalur yang akan diolah
dengan persamaan sebagai berikut:
......................................................................................... (7)
Setelah menghitung jumlah lintasan acuan pengolahan tanah, ditentukan
titik-titik ujung tiap lintasan sebagai patokan untuk pengolahan secara berurutan
dari lintasan. Berikut persamaan untuk menentukan titik-titik ujung:
.................................... (8)
.............................. (9)
................................. (10)
........................... (11)
Dimana nilai n adalah indeks lintasan olah ke-n.
Perhitungan sudut orientasi lintasan dihitung menggunakan persamaan
berikut (Rahman, 2013):
..................................................................................... (12)
.................................................................................................... (13)
Untuk menghitung penentuan sudut koreksi yang diberikan terhadap
simpangan dapat dihitung dengan menggunakan persamaan :
................................................... (18)
dimana,
...... (14)
........................ (15)
........................................................... (16)
............................................................................................................................ (17)
7
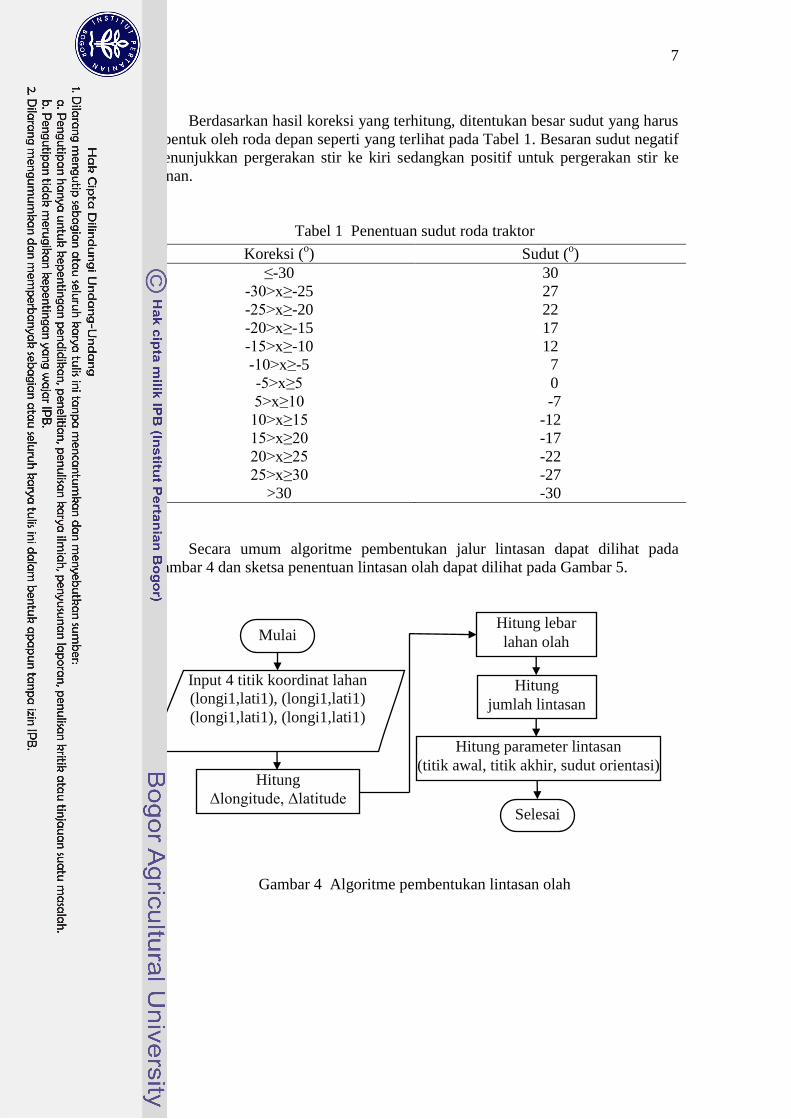
Berdasarkan hasil koreksi yang terhitung, ditentukan besar sudut yang harus
dibentuk oleh roda depan seperti yang terlihat pada Tabel 1. Besaran sudut negatif
menunjukkan pergerakan stir ke kiri sedangkan positif untuk pergerakan stir ke
kanan.
Tabel 1 Penentuan sudut roda traktor
Koreksi (o) Sudut (
o)
≤-30 30
-30>x≥-25 27
-25>x≥-20 22
-20>x≥-15 17
-15>x≥-10 12
-10>x≥-5 7
-5>x≥5 0
5>x≥10 -7
10>x≥15 -12
15>x≥20 -17
20>x≥25 -22
25>x≥30 -27
>30 -30
Secara umum algoritme pembentukan jalur lintasan dapat dilihat pada
Gambar 4 dan sketsa penentuan lintasan olah dapat dilihat pada Gambar 5.
Gambar 4 Algoritme pembentukan lintasan olah
Mulai
Input 4 titik koordinat lahan
(longi1,lati1), (longi1,lati1)
(longi1,lati1), (longi1,lati1)
Hitung
Δlongitude, Δlatitude
Hitung lebar
lahan olah
Hitung
jumlah lintasan
Hitung parameter lintasan
(titik awal, titik akhir, sudut orientasi)
Selesai
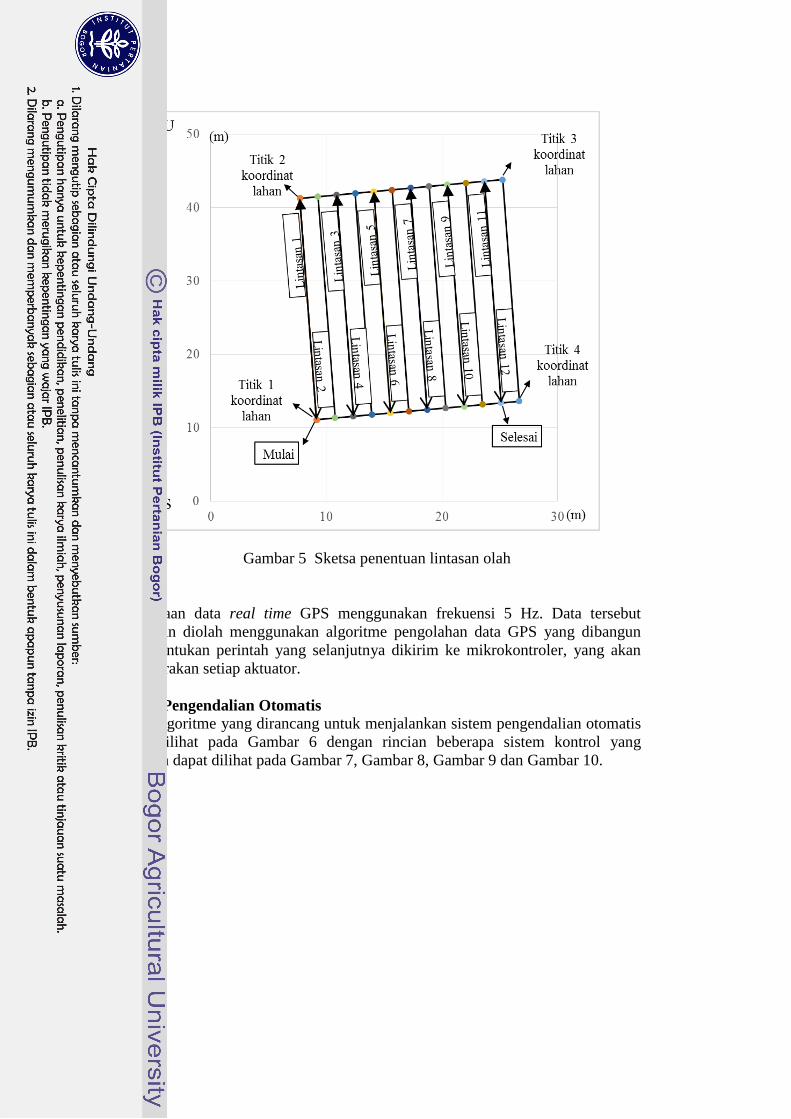
8
Gambar 5 Sketsa penentuan lintasan olah
Pembacaan data real time GPS menggunakan frekuensi 5 Hz. Data tersebut
kemudian diolah menggunakan algoritme pengolahan data GPS yang dibangun
dan ditentukan perintah yang selanjutnya dikirim ke mikrokontroler, yang akan
menggerakan setiap aktuator.
Sistem Pengendalian Otomatis
Algoritme yang dirancang untuk menjalankan sistem pengendalian otomatis
dapat dilihat pada Gambar 6 dengan rincian beberapa sistem kontrol yang
berperan dapat dilihat pada Gambar 7, Gambar 8, Gambar 9 dan Gambar 10.
9
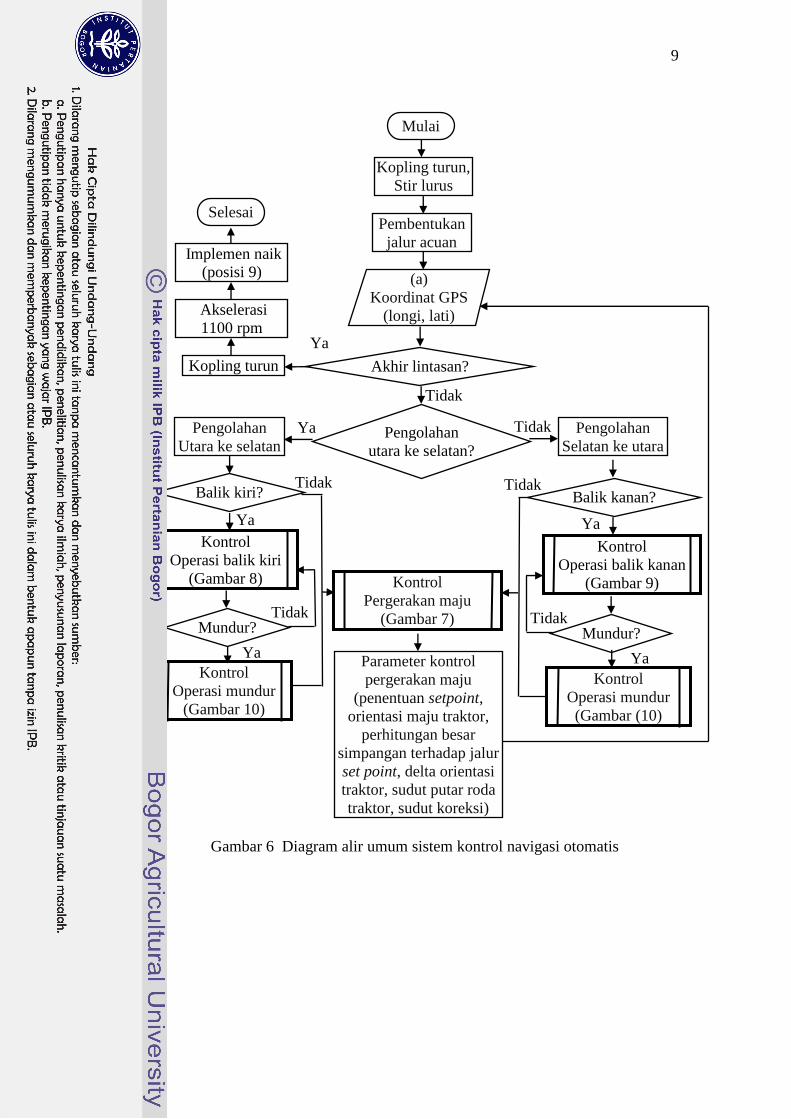
Gambar 6 Diagram alir umum sistem kontrol navigasi otomatis
Mundur?
Tidak
Pengolahan
Selatan ke utara
Balik kanan?
Kontrol
Operasi mundur
(Gambar (10)
Kontrol
Operasi balik kanan
(Gambar 9)
Pengolahan
Utara ke selatan
Balik kiri?
Kontrol
Operasi balik kiri
(Gambar 8)
Kontrol
Operasi mundur
(Gambar 10)
Mulai
(a)
Koordinat GPS
(longi, lati)
Pembentukan
jalur acuan
Akhir lintasan? Kopling turun
Selesai
Pengolahan
utara ke selatan?
Parameter kontrol
pergerakan maju
(penentuan setpoint,
orientasi maju traktor,
perhitungan besar
simpangan terhadap jalur
set point, delta orientasi
traktor, sudut putar roda
traktor, sudut koreksi)
Ya
Tidak Ya
Ya Ya
Tidak Tidak
Akselerasi
1100 rpm
Implemen naik
(posisi 9)
Mundur?
Tidak Tidak
Ya Ya
Kopling turun,
Stir lurus
Kontrol
Pergerakan maju
(Gambar 7)
10
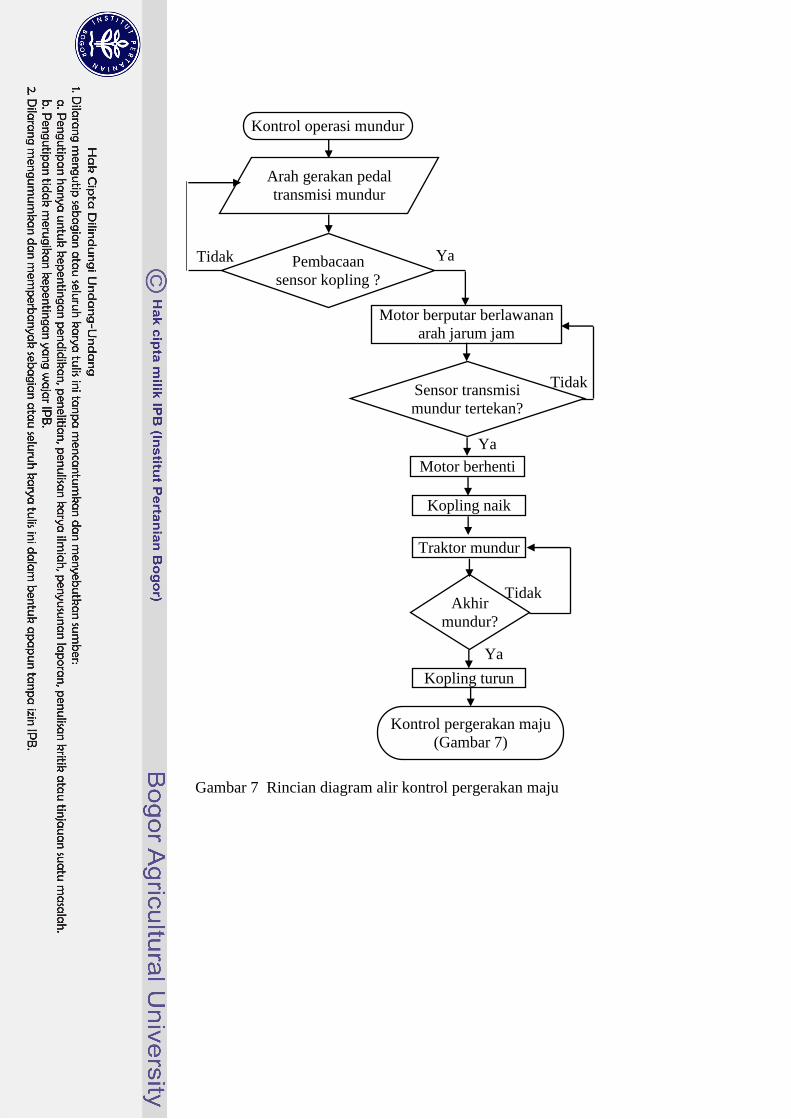
Gambar 7 Rincian diagram alir kontrol pergerakan maju
Kopling turun
Ya
Ya
Tidak
Kontrol operasi mundur
Arah gerakan pedal
transmisi mundur
Pembacaan
sensor kopling ?
Motor berputar berlawanan
arah jarum jam
Motor berhenti
Akhir
mundur?
Sensor transmisi
mundur tertekan?
Tidak Ya
Tidak
Kontrol pergerakan maju
(Gambar 7)
Kopling naik
Traktor mundur

11
Gambar 8 Rincian diagram alir
umum kontrol operasi
balik kiri
Gambar 9 Rincian diagram alir
umum kontrol operasi
balik kanan
Stir kiri 30o,
rem kiri turun
Kontrol operasi balik kiri
Akhir balik? Tidak
Ya
Kopling turun
Rem kiri naik
Kontrol operasi mundur
(Gambar 10)
Ya
Tidak
Kopling turun,
implemen naik
(posisi 9)
Stir kanan 30o
(delay 5s)
Koreksi terhadap jalur
acuan
Akhir koreksi?
Stir kanan 30o,
rem kanan turun
Kontrol operasi balik kanan
Akhir balik? Tidak
Ya
Kopling turun
Rem kanan naik
Kontrol operasi mundur
(Gambar 10)
Ya
Tidak
Kopling turun,
implemen naik
(posisi 9)
Stir kiri 30o
(delay 5s)
Koreksi terhadap jalur
acuan
Akhir koreksi?
12
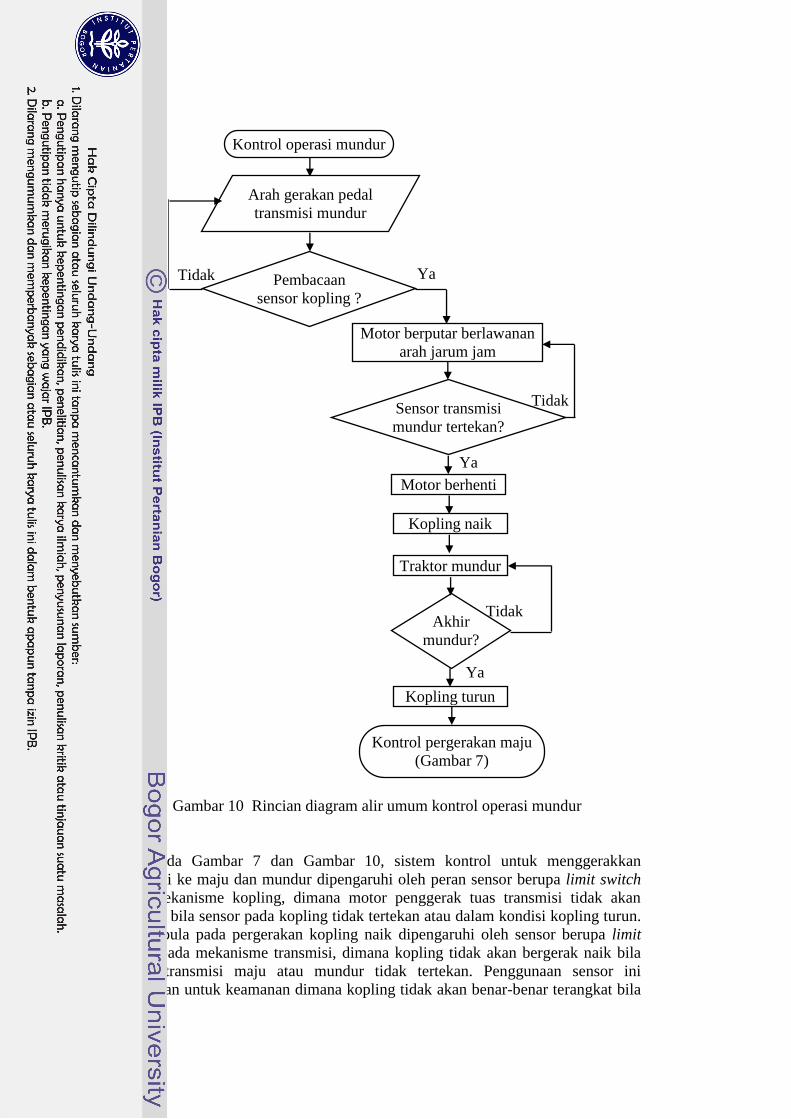
Gambar 10 Rincian diagram alir umum kontrol operasi mundur
Pada Gambar 7 dan Gambar 10, sistem kontrol untuk menggerakkan
transmisi ke maju dan mundur dipengaruhi oleh peran sensor berupa limit switch
pada mekanisme kopling, dimana motor penggerak tuas transmisi tidak akan
berputar bila sensor pada kopling tidak tertekan atau dalam kondisi kopling turun.
Begitu pula pada pergerakan kopling naik dipengaruhi oleh sensor berupa limit
switch pada mekanisme transmisi, dimana kopling tidak akan bergerak naik bila
sensor transmisi maju atau mundur tidak tertekan. Penggunaan sensor ini
digunakan untuk keamanan dimana kopling tidak akan benar-benar terangkat bila
Kopling turun
Ya
Ya
Tidak
Kontrol operasi mundur
Arah gerakan pedal
transmisi mundur
Pembacaan
sensor kopling ?
Motor berputar berlawanan
arah jarum jam
Motor berhenti
Akhir
mundur?
Sensor transmisi
mundur tertekan?
Tidak Ya
Tidak
Kontrol pergerakan maju
(Gambar 7)
Kopling naik
Traktor mundur

13
transmisi belum masuk ke posisi transmisi maju atau mundur, sehingga traktor
akan tetap dalam posisi tidak bergerak.
Algoritme sistem tersebut berbeda dengan hasil pada penelitian Rahman
(2013) yang dapat dilihat pada Gambar 11, karena adanya perbedaan penggunaan
jalur olah lahan dan penambahan mekanisme mundur serta pemisahan mekanisme
rem kanan dan kiri.
Gambar 11 Algoritme pengolahan data GPS (Rahman, 2013)
Ketika traktor berada pada lintasan lurus, sistem akan menentukan lintasan
acuan yang harus dilalui traktor, berdasarkan arah pengolahan, posisi traktor serta
urutan lintasan yang dilalui. Pada titik akhir lintasan sebelumnya sudah dilewati
maka sistem akan menggerakan traktor untuk memasuki ke lintasan berikutnya.
Ketika pergerakan belok, traktor akan belok tanpa melakukan koreksi, dan sistem
akan berhenti belok pada titik longitude tertentu kemudian menentukan kembali
lintasan acuan yang harus dilalui traktor.
14
HASIL DAN PEMBAHASAN
Pembahasan
Penyusunan algoritme pada mikrokontroler dilakukan dengan menggunakan
perangkat lunak Code Vision AVR berbasis bahasa pemrograman C dimana bahasa
C merupakan middle level language (bahasa tingkat menengah) sehingga mudah
untuk melakukan interfacing (pembuatan program antar muka) ke perangkat keras
(Joni, 2006). Runtutan program yang telah dibuat kemudian di-compile,
menerjemahkan kumpulan kode program yang ditulis dalam suatu bahasa
pemrograman tertentu ke dalam bahasa mesin, Joni (2006), lalu diunduh ke chip
mikrokontroler. Pemrograman pada Code Vision dapat dilihat pada Gambar 12.
Gambar 12 Pemrograman dengan Code Vision AVR
Sedangkan algoritme pembuatan jalur menggunakan Visual Basic seperti
yang terlihat pada Gambar 13. Kondisi tampilan di komputer pengendali ketika
sistem dijalankan dapat dilihat pada Gambar 14.
Gambar 13 Pemrograman dengan Visual Basic
15
Gambar 14 Tampilan ketika sistem dijalankan
Pengujian Kinerja di Lapangan
Hasil uji kinerja menunjukkan bahwa traktor sudah bisa bergerak sesuai
dengan algoritme jalur baru yang dikembangkan berdasarkan input empat titik
koordinat petak lahan. Pengujian lintasan lurus dilakukan pada panjang lintasan
30 m dan pada kondisi tanah memiliki kadar air 19.88% pada kedalaman 0-5 cm
dan 21.58% pada kedalaman 5-10 cm. Pengujian dilakukan dengan dua perlakuan,
yaitu tanpa diberikan simpangan awal dan menggunakan simpangan awal sejauh 4
m. Hasil pengujian tanpa simpangan awal dapat dilihat pada Gambar 15 dengan
besar simpangan terbesar 16.77 cm dan simpangan rata-rata 8.62 cm dan
pengujian menggunakan simpangan awal dapat dilihat pada Gambar 16.
(a) (b) (c)
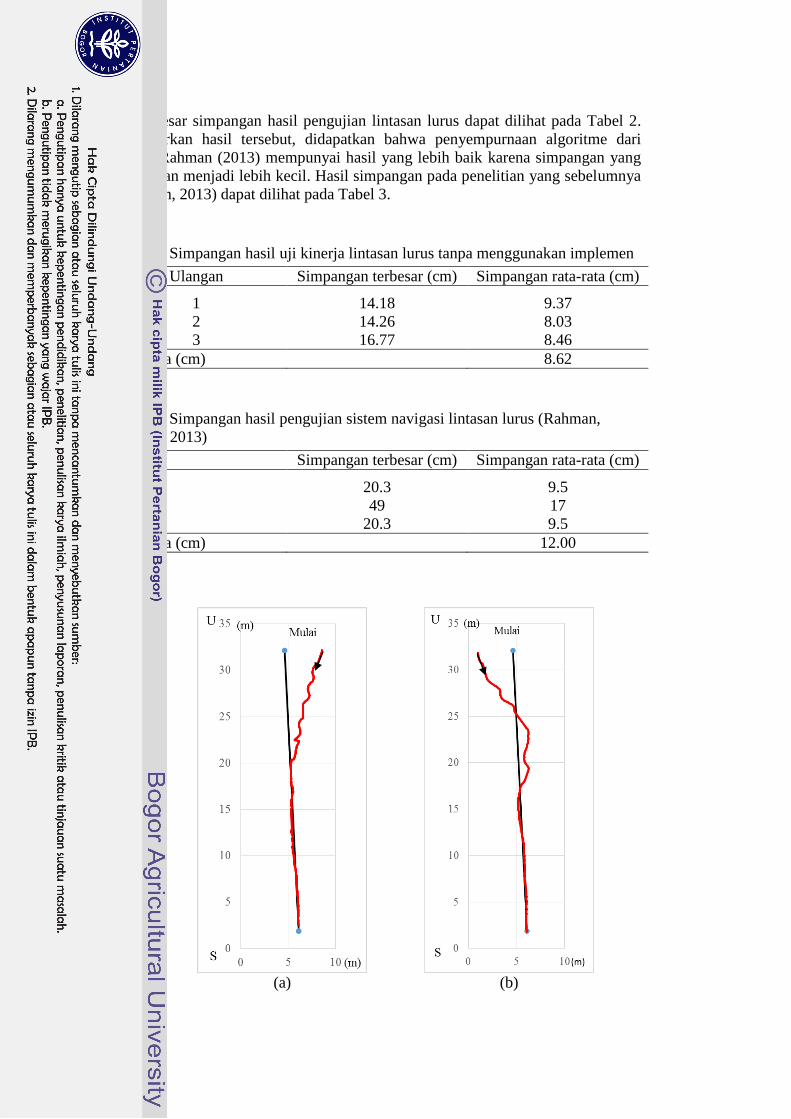
Gambar 15 Hasil uji lintasan lurus tanpa menggunakan implemen
16
Besar simpangan hasil pengujian lintasan lurus dapat dilihat pada Tabel 2.
Berdasarkan hasil tersebut, didapatkan bahwa penyempurnaan algoritme dari
desain Rahman (2013) mempunyai hasil yang lebih baik karena simpangan yang
dihasilkan menjadi lebih kecil. Hasil simpangan pada penelitian yang sebelumnya
(Rahman, 2013) dapat dilihat pada Tabel 3.
Tabel 2 Simpangan hasil uji kinerja lintasan lurus tanpa menggunakan implemen
Ulangan Simpangan terbesar (cm) Simpangan rata-rata (cm)
1 14.18 9.37
2 14.26 8.03
3 16.77 8.46
Rata-rata (cm) 8.62
Tabel 3 Simpangan hasil pengujian sistem navigasi lintasan lurus (Rahman,
2013)
Ulangan Simpangan terbesar (cm) Simpangan rata-rata (cm)
1 20.3 9.5
2 49 17
3 20.3 9.5
Rata-rata (cm) 12.00
(a) (b)
17
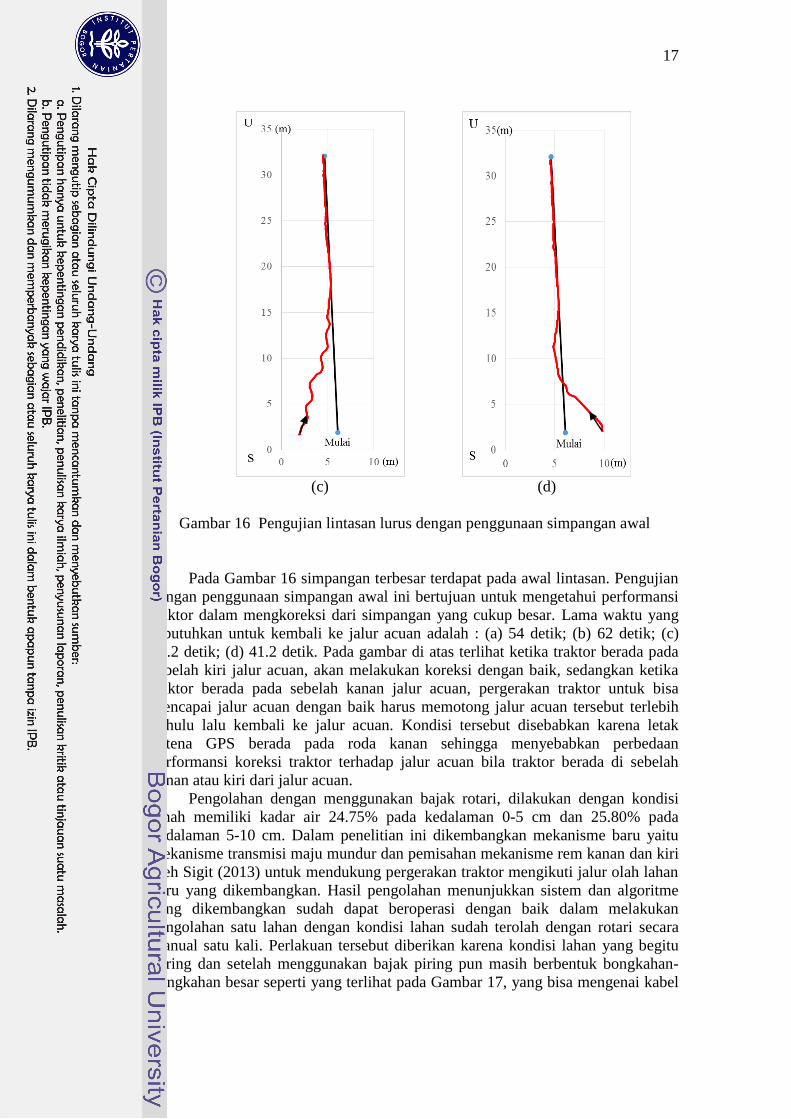
(c) (d)
Gambar 16 Pengujian lintasan lurus dengan penggunaan simpangan awal
Pada Gambar 16 simpangan terbesar terdapat pada awal lintasan. Pengujian
dengan penggunaan simpangan awal ini bertujuan untuk mengetahui performansi
traktor dalam mengkoreksi dari simpangan yang cukup besar. Lama waktu yang
dibutuhkan untuk kembali ke jalur acuan adalah : (a) 54 detik; (b) 62 detik; (c)
48.2 detik; (d) 41.2 detik. Pada gambar di atas terlihat ketika traktor berada pada
sebelah kiri jalur acuan, akan melakukan koreksi dengan baik, sedangkan ketika
traktor berada pada sebelah kanan jalur acuan, pergerakan traktor untuk bisa
mencapai jalur acuan dengan baik harus memotong jalur acuan tersebut terlebih
dahulu lalu kembali ke jalur acuan. Kondisi tersebut disebabkan karena letak
antena GPS berada pada roda kanan sehingga menyebabkan perbedaan
performansi koreksi traktor terhadap jalur acuan bila traktor berada di sebelah
kanan atau kiri dari jalur acuan.
Pengolahan dengan menggunakan bajak rotari, dilakukan dengan kondisi
tanah memiliki kadar air 24.75% pada kedalaman 0-5 cm dan 25.80% pada
kedalaman 5-10 cm. Dalam penelitian ini dikembangkan mekanisme baru yaitu
mekanisme transmisi maju mundur dan pemisahan mekanisme rem kanan dan kiri
oleh Sigit (2013) untuk mendukung pergerakan traktor mengikuti jalur olah lahan
baru yang dikembangkan. Hasil pengolahan menunjukkan sistem dan algoritme
yang dikembangkan sudah dapat beroperasi dengan baik dalam melakukan
pengolahan satu lahan dengan kondisi lahan sudah terolah dengan rotari secara
manual satu kali. Perlakuan tersebut diberikan karena kondisi lahan yang begitu
kering dan setelah menggunakan bajak piring pun masih berbentuk bongkahan-
bongkahan besar seperti yang terlihat pada Gambar 17, yang bisa mengenai kabel

18
yang berada bagian bawah traktor. Kondisi lahan hasil pengolahan dengan bajak
rotari dapat dilihat pada Gambar 18. Pergerakan traktor hasil pengujian lapangan
dapat dilihat pada Gambar 19.
Gambar 17 Kondisi lahan sebelum diolah dengan bajak rotari
Gambar 18 Kondisi lahan hasil pengolahan dengan bajak rotari
19
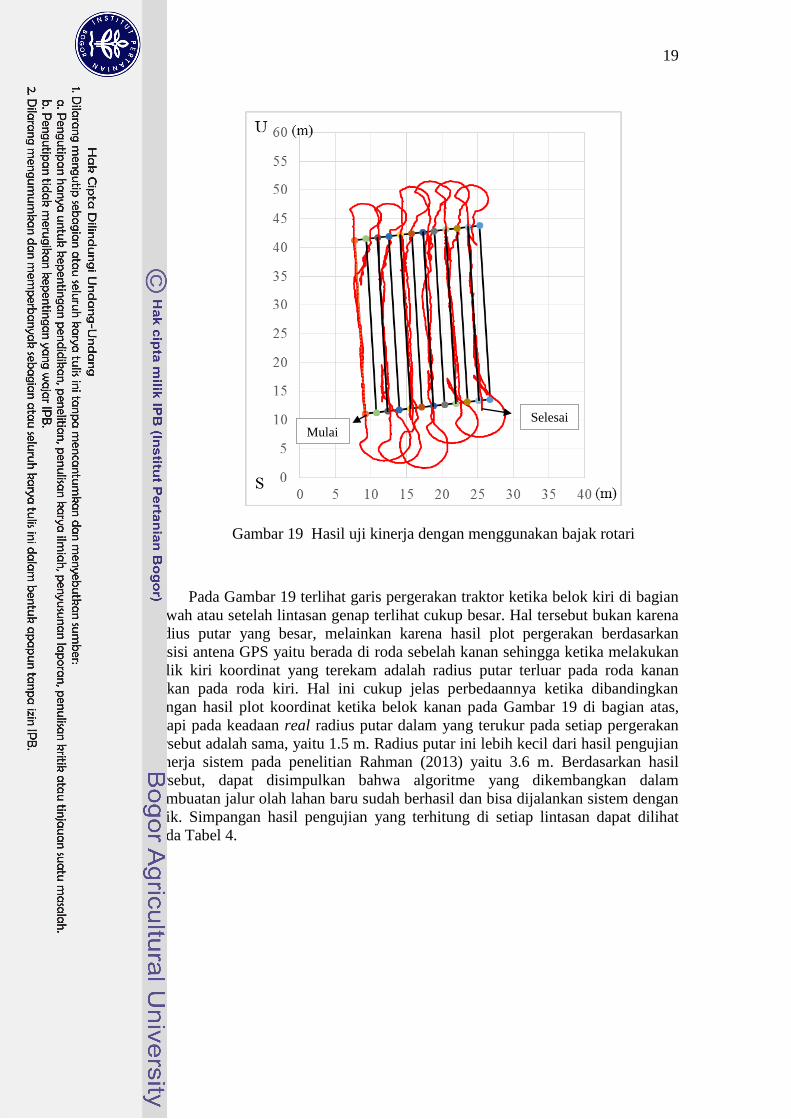
Gambar 19 Hasil uji kinerja dengan menggunakan bajak rotari
Pada Gambar 19 terlihat garis pergerakan traktor ketika belok kiri di bagian
bawah atau setelah lintasan genap terlihat cukup besar. Hal tersebut bukan karena
radius putar yang besar, melainkan karena hasil plot pergerakan berdasarkan
posisi antena GPS yaitu berada di roda sebelah kanan sehingga ketika melakukan
balik kiri koordinat yang terekam adalah radius putar terluar pada roda kanan
bukan pada roda kiri. Hal ini cukup jelas perbedaannya ketika dibandingkan
dengan hasil plot koordinat ketika belok kanan pada Gambar 19 di bagian atas,
tetapi pada keadaan real radius putar dalam yang terukur pada setiap pergerakan
tersebut adalah sama, yaitu 1.5 m. Radius putar ini lebih kecil dari hasil pengujian
kinerja sistem pada penelitian Rahman (2013) yaitu 3.6 m. Berdasarkan hasil
tersebut, dapat disimpulkan bahwa algoritme yang dikembangkan dalam
pembuatan jalur olah lahan baru sudah berhasil dan bisa dijalankan sistem dengan
baik. Simpangan hasil pengujian yang terhitung di setiap lintasan dapat dilihat
pada Tabel 4.
Mulai Selesai
20
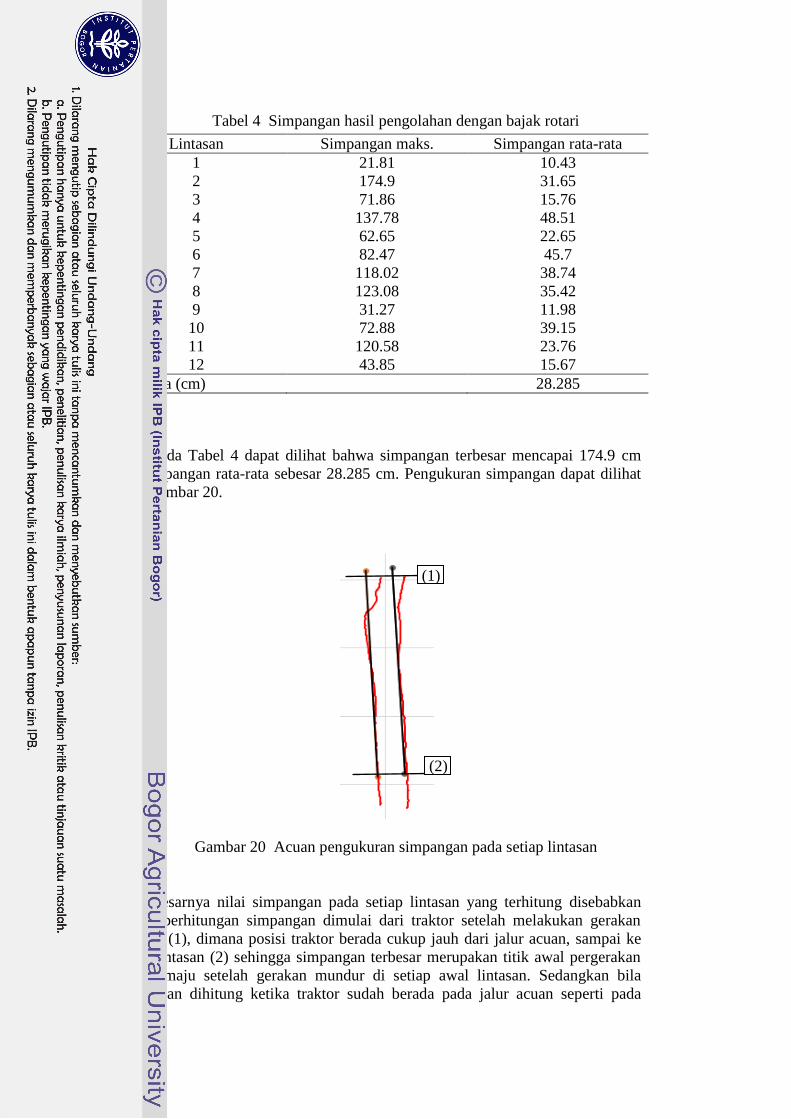
Tabel 4 Simpangan hasil pengolahan dengan bajak rotari
Lintasan Simpangan maks. Simpangan rata-rata
1 21.81 10.43
2 174.9 31.65
3 71.86 15.76
4 137.78 48.51
5 62.65 22.65
6 82.47 45.7
7 118.02 38.74
8 123.08 35.42
9 31.27 11.98
10 72.88 39.15
11 120.58 23.76
12 43.85 15.67
Rata-rata (cm) 28.285
Pada Tabel 4 dapat dilihat bahwa simpangan terbesar mencapai 174.9 cm
dan simpangan rata-rata sebesar 28.285 cm. Pengukuran simpangan dapat dilihat
pada Gambar 20.
Gambar 20 Acuan pengukuran simpangan pada setiap lintasan
Besarnya nilai simpangan pada setiap lintasan yang terhitung disebabkan
karena perhitungan simpangan dimulai dari traktor setelah melakukan gerakan
mundur (1), dimana posisi traktor berada cukup jauh dari jalur acuan, sampai ke
ujung lintasan (2) sehingga simpangan terbesar merupakan titik awal pergerakan
traktor maju setelah gerakan mundur di setiap awal lintasan. Sedangkan bila
simpangan dihitung ketika traktor sudah berada pada jalur acuan seperti pada
(1)
(2)
21
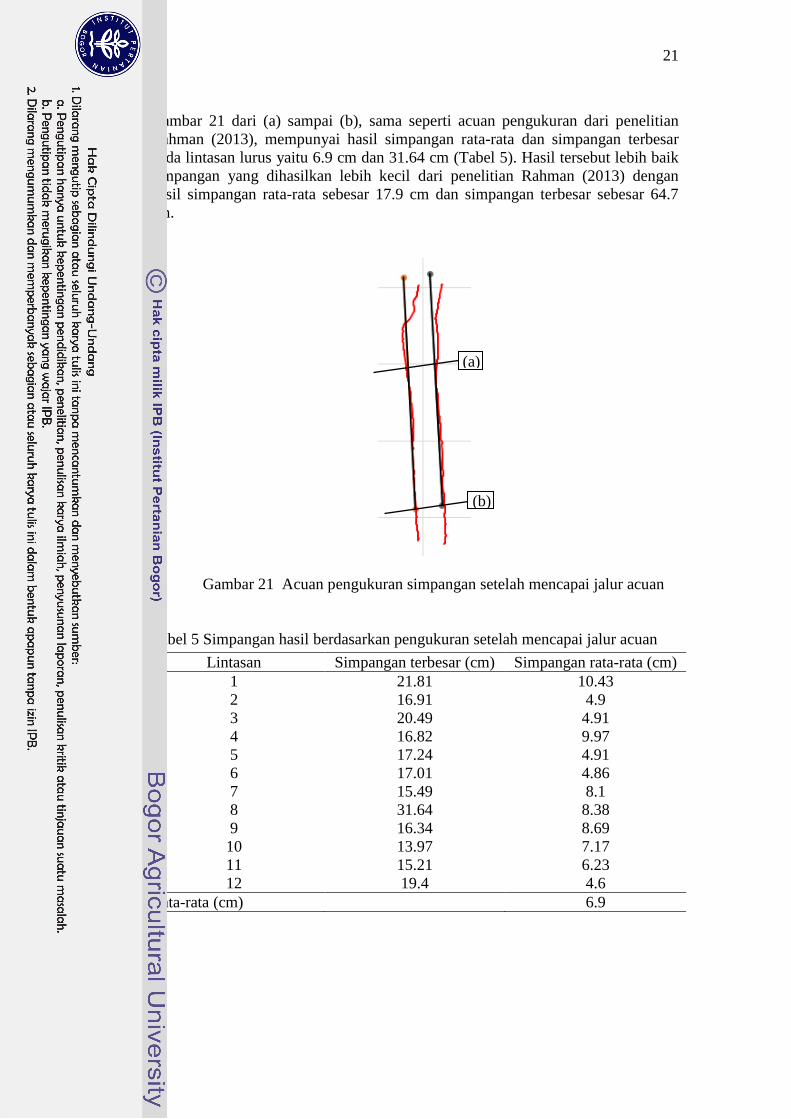
Gambar 21 dari (a) sampai (b), sama seperti acuan pengukuran dari penelitian
Rahman (2013), mempunyai hasil simpangan rata-rata dan simpangan terbesar
pada lintasan lurus yaitu 6.9 cm dan 31.64 cm (Tabel 5). Hasil tersebut lebih baik
simpangan yang dihasilkan lebih kecil dari penelitian Rahman (2013) dengan
hasil simpangan rata-rata sebesar 17.9 cm dan simpangan terbesar sebesar 64.7
cm.
Gambar 21 Acuan pengukuran simpangan setelah mencapai jalur acuan
Tabel 5 Simpangan hasil berdasarkan pengukuran setelah mencapai jalur acuan
Lintasan Simpangan terbesar (cm) Simpangan rata-rata (cm)
1 21.81 10.43
2 16.91 4.9
3 20.49 4.91
4 16.82 9.97
5 17.24 4.91
6 17.01 4.86
7 15.49 8.1
8 31.64 8.38
9 16.34 8.69
10 13.97 7.17
11 15.21 6.23
12 19.4 4.6
Rata-rata (cm) 6.9
(a)
(b)
22
Pada pengujian dengan menggunakan implemen bajak rotari, waktu tempuh
yang terukur rata-rata setiap menempuh lintasan lurus dari awal hingga akhir jalur
olahan lahan adalah 81.2 detik, waktu balik kanan rata-rata 47 detik, waktu balik
kiri rata-rata 43.4 detik dan waktu mundur rata-rata 26.4 detik.
SIMPULAN DAN SARAN
Simpulan
Penyempurnaan algoritme dari desain Rahman (2013) tanpa perubahan
komponen mekanik menghasilkan kinerja traktor pada uji lintasan lurus tanpa
menggunakan implemen berupa simpangan rata-rata adalah 8.62 cm dan
simpangan terbesar 16.77 cm dengan kondisi tanah memiliki kadar air 19.88%
pada kedalaman 0-5 cm dan 21.58% pada kedalaman 5-10 cm, hasil ini lebih baik
karena simpangan rata-rata menurun 28.17% dari hasil uji penelitian Rahman
(2013).
Pengoperasian dengan menggunakan implemen menghasilkan simpangan
rata-rata pada lintasan lurus adalah 6.9 cm dan simpangan terbesar 31.64 cm
dengan kondisi tanah memiliki kadar air 24.75% pada kedalaman 0-5 cm dan
25.80% pada kedalaman 5-10 cm, hasil ini menunjukkan bahwa simpangan rata-
rata menurun 61.45% dari hasil penelitian Rahman (2013).
Dalam penelitian ini dikembangkan mekanisme baru yaitu mekanisme
transmisi maju mundur dan pemisahan mekanisme rem kanan dan kiri oleh Sigit
(2013) untuk mendukung pergerakan traktor mengikuti jalur olah baru dengan
hasil kinerja radius putar 1.5 m.
Saran
Algoritme pemberian nilai sudut koreksi terhadap jalur acuan harus
dikembangkan agar pergerakan stir lebih akurat. Algoritme penentuan jalur
seharusnya dibuat beberapa pilihan jalur pengolahan sehingga tidak terbatas
dengan kondisi lahan. Algoritme pengiriman data dari pengolahan GPS di Visual
Basic ke mikrokontroler pun harus dikembangkan agar tidak ada lagi penumpukan
data dan misses (perintah yang tidak tereksekusi) di buffer.
23
DAFTAR PUSTAKA
Ahmad, U., dkk. 2011. Pengembangan Metoda Deteksi Rintangan Menggunakan
Kamera CCD untuk Traktor Tanpa Awak. Prosiding Seminar Nasional
PERTETA 2011. Hal 125-133. Bandung. Indonesia.
Cormen TH, Leiserson CE, Rivest RL, Stein C. 2001. Introduction to Algorithms
Second Edition. The MIT Press: Cambridge, Massachusetts – London,
England.
Desrial, dkk. 2010. Pengembangan Sistem Kemudi Otomatis Pada Traktor
Pertanian Menggunakan Navigasi GPS. Prosiding Seminar Nasional
Mekanisasi Pertanian. 2010. Hal: 95-104. Serpong. Indonesia.
Desrial, dkk. 2011. Rancang Bangun Sistem Kontrol Otomatis Untuk Kemudi,
Kopling dan Akselerator Pada Traktor Pertanian. Prosiding Seminar
Nasional PERTETA 2011. Hal : 62-69. Bandung: FTIP-UNPAD.
Gunawan, M Sigit. 2013. Modifikasi Pengendali Traktor Otomatis Dan Rancang
Bangun Unit Pengendali Otomatis Tuas Transmisi Maju - Mundur
Menggunakan Atmega 128 [skripsi]. Bogor: Program Sarjana, Institut
Pertanian Bogor.
Joni IM, Raharjo B. 2006. Pemrograman C dan Implementasinya. Informatika
Bandung: Bandung.
Rahman C S. 2013. Rancang bangun sistem kemudi otomatis traktor pertanian
berbasis GPS [Tesis]. Bogor: Program Pasca Sarjana, Institut Pertanian
Bogor.
Snyder, JP. 1987. Map Projections — A Working Manual. Geological Survey
Professional Paper 1395. Washington, DC: U. S. Government Printing
Office.
Srivastava AK, Goering CE, Rohrbach RP, Buckmaster, DR. 2006. Engineering
Principles of Agricultural Machines. Ed ke-2. Michigan: ASABE.
Sumarno, E. 2012. Modifikasi Sistem Pengendalian Kemudi Traktor, Tuas
Kopling, dan Tuas Akselerasi Traktor Roda Empat Menggunakan
Mikrokontroller DT-51 [skripsi]. Bogor: Program Sarjana, Institut Pertanian
Bogor.
24
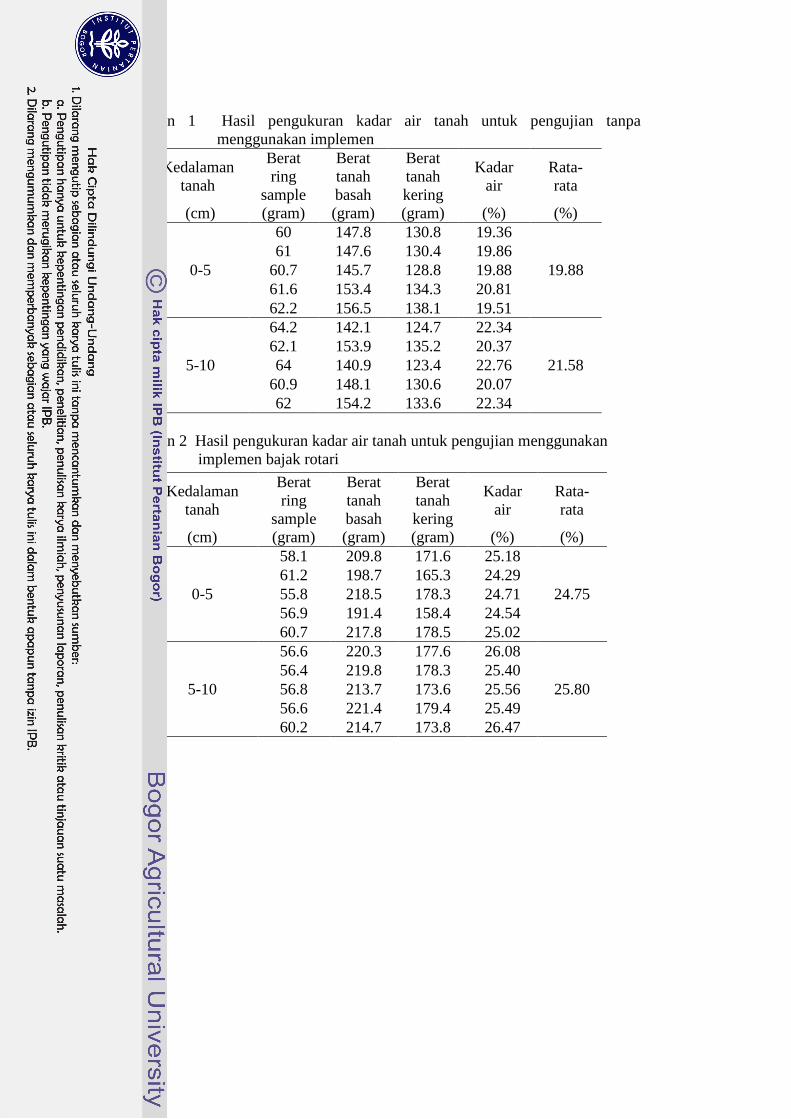
Lampiran 1 Hasil pengukuran kadar air tanah untuk pengujian tanpa
menggunakan implemen
Kedalaman
tanah
Berat
ring
sample
Berat
tanah
basah
Berat
tanah
kering
Kadar
air
Rata-
rata
(cm) (gram) (gram) (gram) (%) (%)
0-5
60 147.8 130.8 19.36
19.88
61 147.6 130.4 19.86
60.7 145.7 128.8 19.88
61.6 153.4 134.3 20.81
62.2 156.5 138.1 19.51
5-10
64.2 142.1 124.7 22.34
21.58
62.1 153.9 135.2 20.37
64 140.9 123.4 22.76
60.9 148.1 130.6 20.07
62 154.2 133.6 22.34
Lampiran 2 Hasil pengukuran kadar air tanah untuk pengujian menggunakan
implemen bajak rotari
Kedalaman
tanah
Berat
ring
sample
Berat
tanah
basah
Berat
tanah
kering
Kadar
air
Rata-
rata
(cm) (gram) (gram) (gram) (%) (%)
0-5
58.1 209.8 171.6 25.18
24.75
61.2 198.7 165.3 24.29
55.8 218.5 178.3 24.71
56.9 191.4 158.4 24.54
60.7 217.8 178.5 25.02
5-10
56.6 220.3 177.6 26.08
25.80
56.4 219.8 178.3 25.40
56.8 213.7 173.6 25.56
56.6 221.4 179.4 25.49
60.2 214.7 173.8 26.47

25
Lampiran 3 Deskripsi pesan GPS tipe ―GPGGA‖
No
Field Keterangan
1 ID tipe pesan
2 Waktu universal (UTC dengan format HHMMSS.SS
3 Sudut lintang (latitude) dengan format DDMM.MMMMM
4 Arah lintang (N = utara (north) dan S = selatan (south)
5 Sudut bujur (longitude) dengan format DDMM.MMMMM
6 Arah bujur (W= barat (west) dan E = timur (east)
7 Indikator kualitas GPS
0 = GPS belum siap 4 = RTK fix
1 = GPS fix 5 = RTK float
2 = DGPS fix
8 Jumlah satelit yang digunakan
9 Nilai HDOP (Horizontal Dilution of Precision) yang menunjukkan
presisi pembacaan GPS
10 Tinggi antena (altitude)
11 Unit tinggi altitude dalam satuan meter (M)
12 Geoidal separation merupakan perbedaan ketinggian ellipsoid Bumi
dengan tinggi permukaan laut (geoid)
13 Unit tinggi geoidal separation dalam satuan meter (M)
14 Waktu koreksi data GPS
15 ID base station

26
RIWAYAT HIDUP
Penulis dilahirkan di Cirebon tanggal 22 Oktober 1991,
putra pertama dari 3 bersaudara, dari Fransiskus Xaverius
Immanuel Lepa dan Erry Pantjawatie, bfl. Penulis
sebelumnya menempuh pendidikan di Sekolah Menengah
Pertama 1 (satu) Cirebon dan Sekolah Menengah Atas 1
(satu) Cirebon lalu kemudian meneruskan pendidikannya
ke Institut Pertanian Bogor. Selama masa perkuliahan di
Institut Pertanian Bogor, penulis menjadi anggota aktif
Himpunan Mahasiswa Teknik Pertanian (Himateta) dan
sering mengikuti kepanitiaan pada beberapa acara besar yang diselenggarakan di
IPB. Penulis pernah menjadi pengajar pada sebuah bimbingan belajar. Penulis
juga selalu berpartisipasi pada lomba-lomba yang diadakan oleh Institusi skala
besar maupun departemen, dan pernah mendapat piala perak lomba basket OMI
(Olimpiade Mahasiswa IPB) pada tingkat satu dan dua kali mendapat piala emas
lomba akustik pada dua tahun berturut pada kompetisi yang diadakan fakultas.