mc-11i monocopter design (college final assignment)
TRANSCRIPT
PRESENTASI TUGAS AKHIR
PERANCANGAN ULANG DAN PENGEMBANGAN SISTEM KENDALI WAHANA TERBANG TANPA AWAK MONOCOPTER MC-11i
Oleh:
Imron Anshori Shodiq
(136 09 044)
Pembimbing:
Dr. Taufiq Mulyanto
Outline
1. Pendahuluan Latar Belakang
Ulasan Desain MC-11
Tujuan Penelitian & DRO
2. Penentuan konfigurasi dan ukuran awal Penentuan titik pusat massa
dan kecepatan putar
Keseimbangan gaya
Perhitungan ukuran sayap
3. Konsep kendali terbang & Algoritma Kendali
4. Spesifikasi komponen elektronika yang digunakan
5. Proses produksi, assembly, dan uji terbang
2

Monocopter merupakan suatu istilah untuk wahana
terbang yang hanya terdiri dari satu sayap dan sebuah
mesin pendorong, serta keseluruhan bagian badannya
(termasuk sayap dan badan atau pod) berputar dengan
kecepatan tertentu hingga menghasilkan gaya angkat
yang cukup untuk membuat wahana tersebut terbang.
Monocopter
3
Pratama, Hendi Aji. 2012. “Studi Konsep dan Rancang Bangun Wahana
Monocopter Tanpa Awak MC-11”. Institut Teknologi Bandung.
Perbandingan kelebihan Rotary Wing dengan fixed wing
Eksplorasi konsep baru
Konsep baru Monocopter VTOL, Hovering, endurance, simple, robust
4
Latar Belakang
Fixed Wing Rotary wing
endurance VTOL
speed Hovering
Video uji terbang MC-11 oleh Hendi Aji P.
5
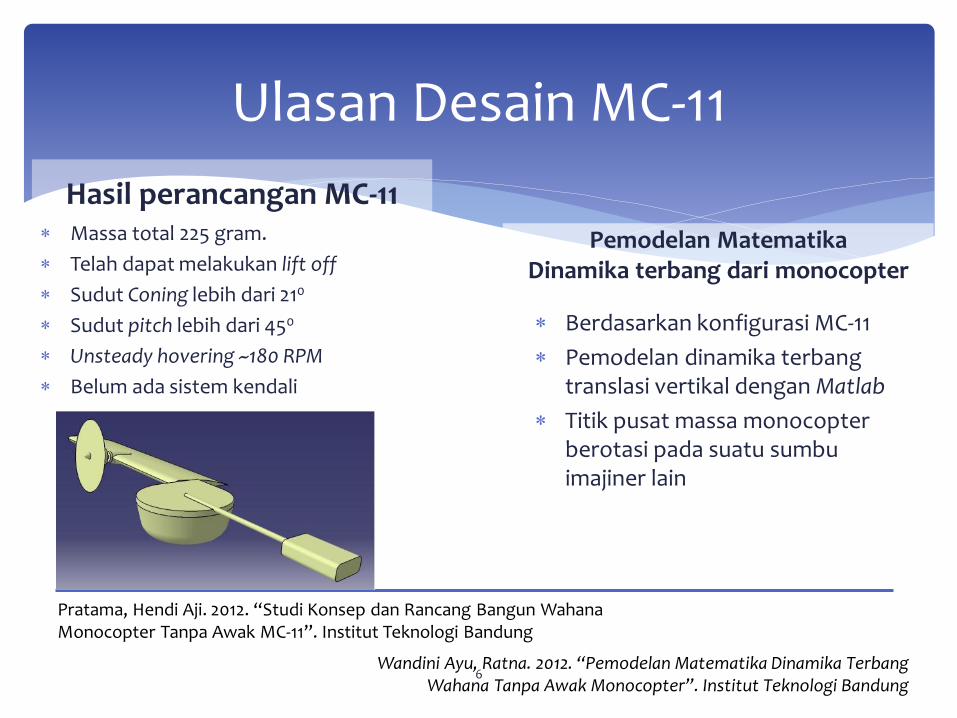
Ulasan Desain MC-11
Hasil perancangan MC-11 Massa total 225 gram.
Telah dapat melakukan lift off
Sudut Coning lebih dari 210
Sudut pitch lebih dari 450
Unsteady hovering ~180 RPM
Belum ada sistem kendali
Pratama, Hendi Aji. 2012. “Studi Konsep dan Rancang Bangun Wahana Monocopter Tanpa Awak MC-11”. Institut Teknologi Bandung
Pemodelan Matematika Dinamika terbang dari monocopter
Berdasarkan konfigurasi MC-11
Pemodelan dinamika terbang translasi vertikal dengan Matlab
Titik pusat massa monocopter berotasi pada suatu sumbu imajiner lain
Wandini Ayu, Ratna. 2012. “Pemodelan Matematika Dinamika Terbang Wahana Tanpa Awak Monocopter”. Institut Teknologi Bandung
6
Tujuan
Perbaikan desain MC-11
Sistem pengendali terbang
Sikap terbang yang sesuai dengan rancangan yaitu kemampuan hovering dengan sudut coning & pitch kecil
Gerak translasi arah horizontal dan vertikal
7
mampu terbang dan hovering dengan sudut coning & pitch kecil,
yaitu kurang dari 120.
Kecepatan rotasinya kurang dari 5Hz atau 300 RPM
Massa totalnya tidak lebih dari 150 gram.
Mampu terbang dan bergerak translasi horizontal dan vertikal
sesuai perintah dari pengendali.
Mampu terbang dalam durasi minimal 5 menit.
Persyaratan dan Tujuan Desain
8
Penentuan Konfigurasi dan Ukuran Awal
9
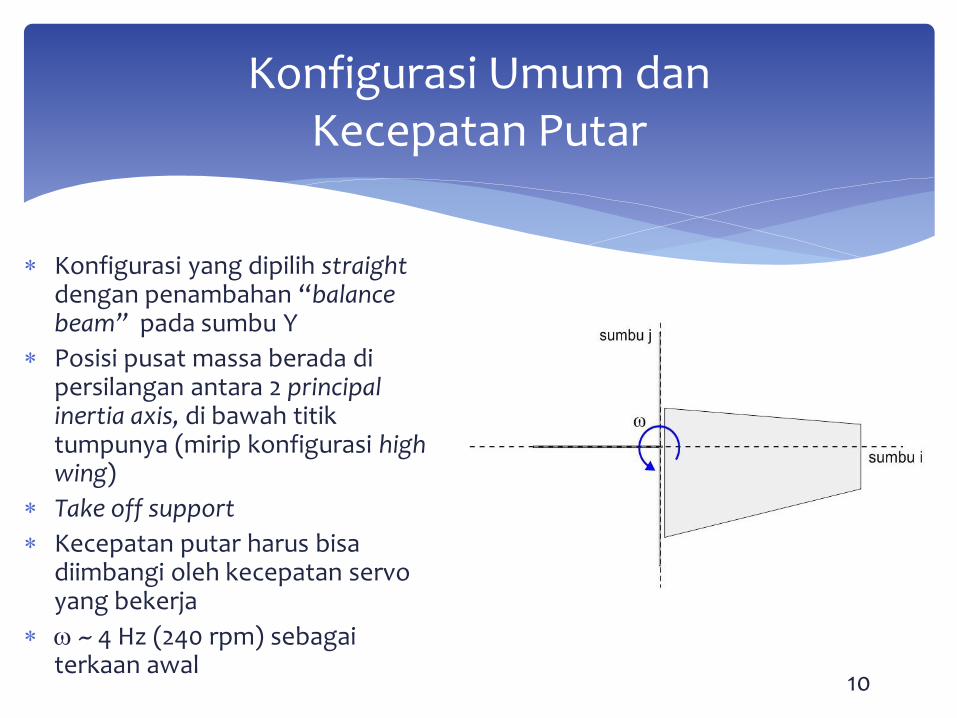
Konfigurasi Umum dan Kecepatan Putar
Konfigurasi yang dipilih straight dengan penambahan “balance beam” pada sumbu Y
Posisi pusat massa berada di persilangan antara 2 principal inertia axis, di bawah titik tumpunya (mirip konfigurasi high wing)
Take off support
Kecepatan putar harus bisa diimbangi oleh kecepatan servo yang bekerja
~ 4 Hz (240 rpm) sebagai terkaan awal
10
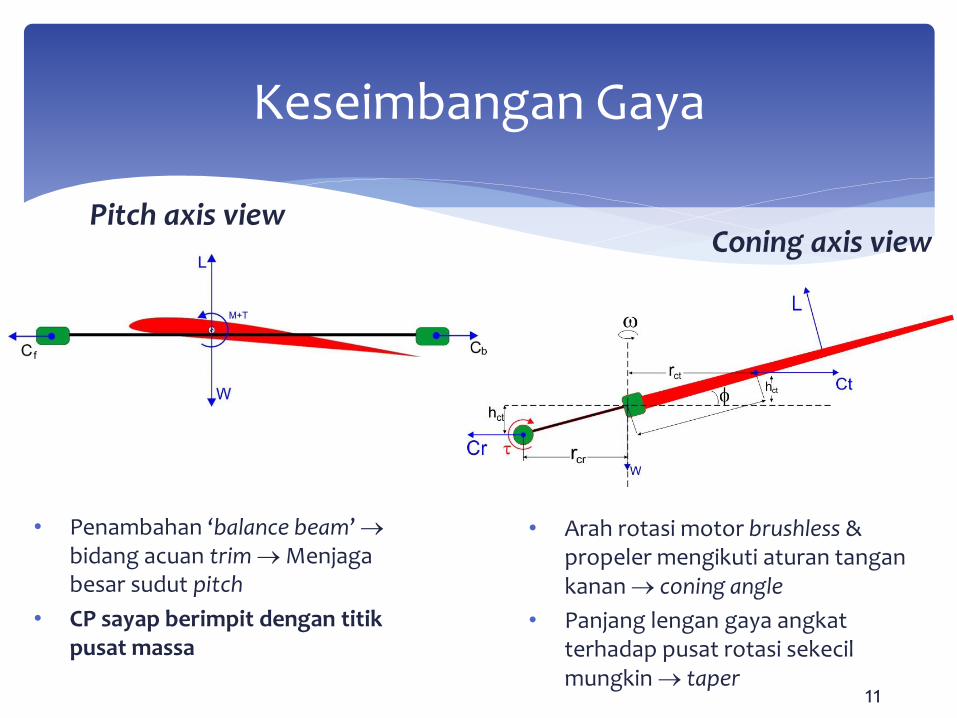
Keseimbangan Gaya
Pitch axis view Coning axis view
• Penambahan ‘balance beam’ bidang acuan trim Menjaga besar sudut pitch
• CP sayap berimpit dengan titik pusat massa
• Arah rotasi motor brushless & propeler mengikuti aturan tangan kanan coning angle
• Panjang lengan gaya angkat terhadap pusat rotasi sekecil mungkin taper
11

Total Massa take off:
146 gram
Belum termasuk data logger & take off support
Massa Komponen Penyusun Monocopter
Pie chart kontribusi massa penyusun monocopter
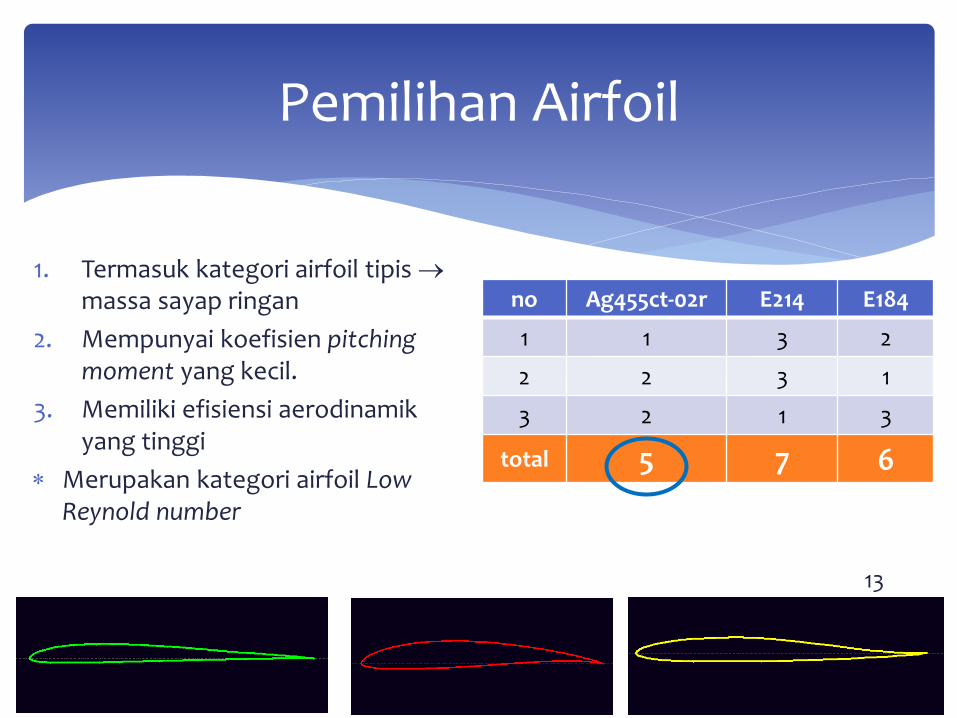
1. Termasuk kategori airfoil tipis massa sayap ringan
2. Mempunyai koefisien pitching moment yang kecil.
3. Memiliki efisiensi aerodinamik yang tinggi
Merupakan kategori airfoil Low Reynold number
Pemilihan Airfoil
13
no Ag455ct-02r E214 E184
1 1 3 2
2 2 3 1
3 2 1 3
total 5 7 6
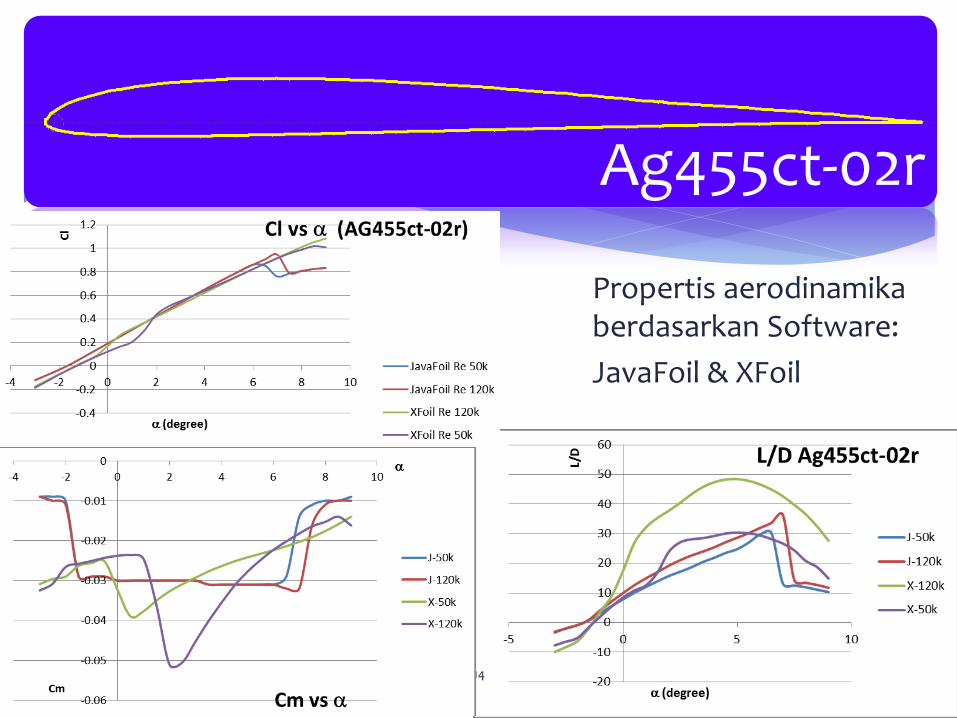
Propertis aerodinamika berdasarkan Software:
JavaFoil & XFoil
Ag455ct-02r
14
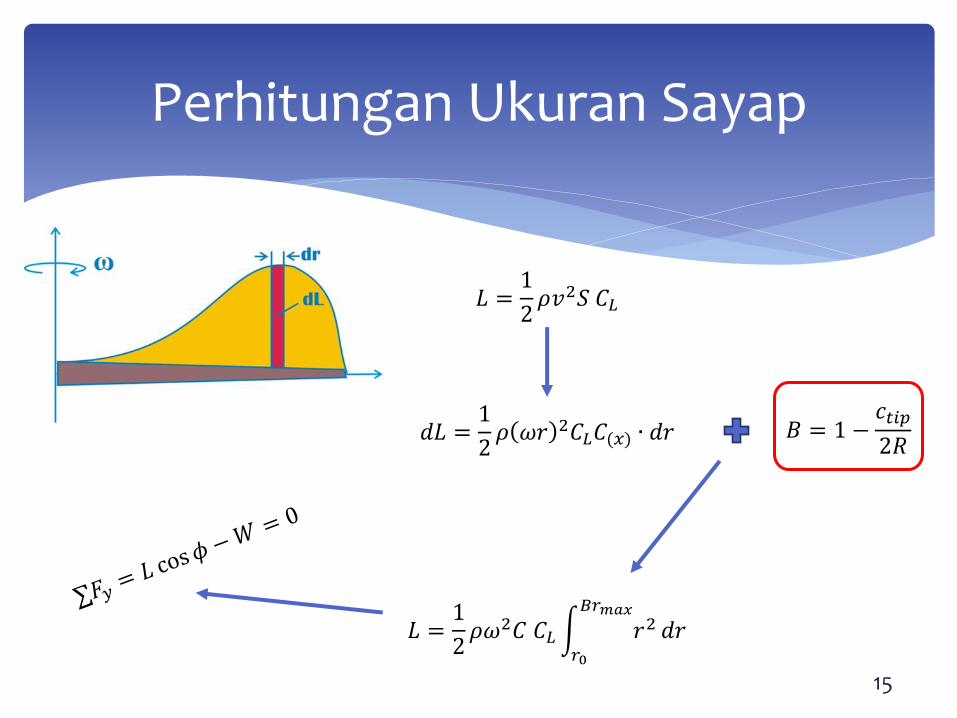
Perhitungan Ukuran Sayap
𝐿 =1
2𝜌𝑣2𝑆 𝐶𝐿
𝑑𝐿 =1
2𝜌 𝜔𝑟 2𝐶𝐿𝐶(𝑥) ∙ 𝑑𝑟 𝐵 = 1 −
𝑐𝑡𝑖𝑝
2𝑅
𝐿 =1
2𝜌𝜔2𝐶 𝐶𝐿 𝑟2
𝐵𝑟𝑚𝑎𝑥
𝑟0
𝑑𝑟
15
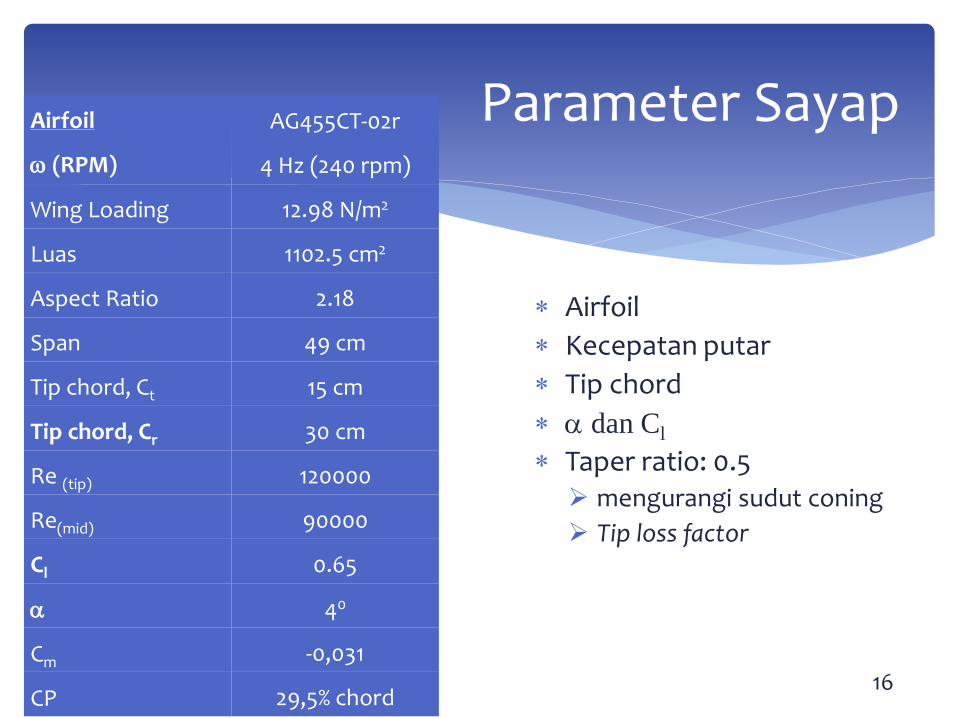
Parameter Sayap
Airfoil
Kecepatan putar
Tip chord
dan Cl
Taper ratio: 0.5 mengurangi sudut coning
Tip loss factor
16
Airfoil AG455CT-02r
(RPM) 4 Hz (240 rpm)
Wing Loading 12.98 N/m2
Luas 1102.5 cm2
Aspect Ratio 2.18
Span 49 cm
Tip chord, Ct 15 cm
Tip chord, Cr 30 cm
Re (tip) 120000
Re(mid) 90000
Cl 0.65
40
Cm -0,031
CP 29,5% chord
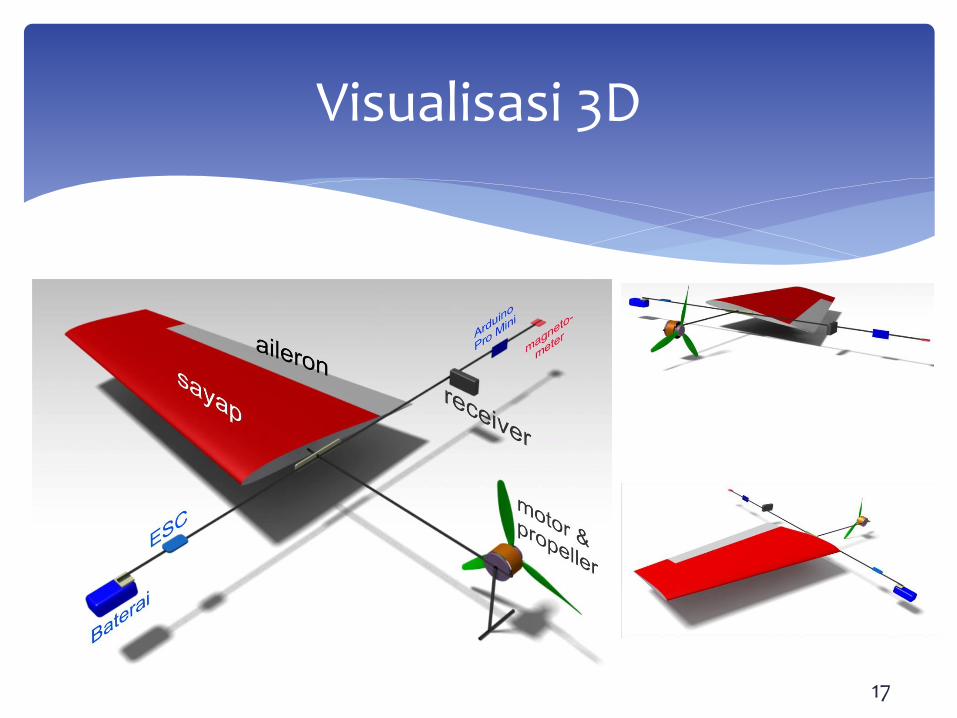
Visualisasi 3D
17

Pengembangan Sistem Pengendali Terbang
Monocopter MC-11i
18
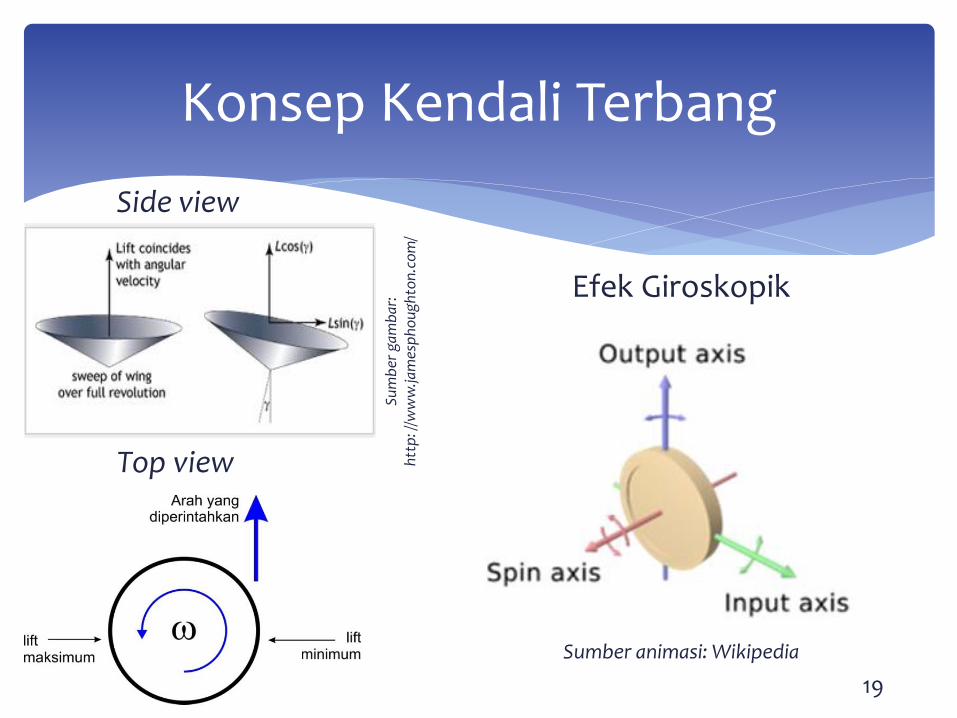
Konsep Kendali Terbang
Side view
Top view
Efek Giroskopik
Sumber animasi: Wikipedia
19
Sum
ber
gam
bar
: h
ttp
: //w
ww
.jam
esp
ho
ugh
ton
.co
m/
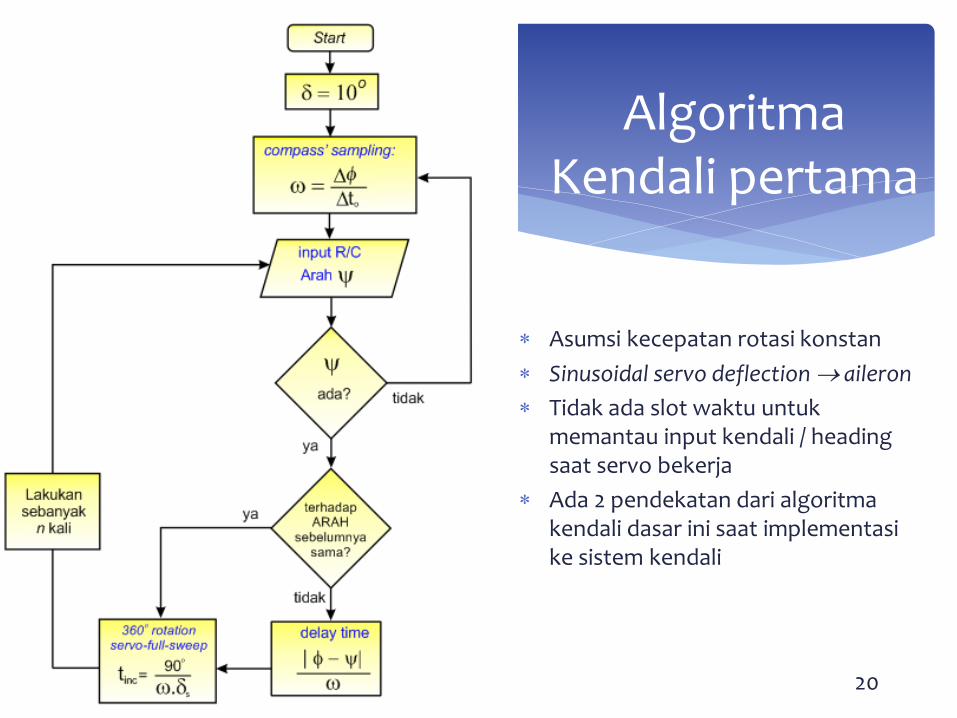
Algoritma Kendali pertama
Asumsi kecepatan rotasi konstan
Sinusoidal servo deflection aileron
Tidak ada slot waktu untuk memantau input kendali / heading saat servo bekerja
Ada 2 pendekatan dari algoritma kendali dasar ini saat implementasi ke sistem kendali
20
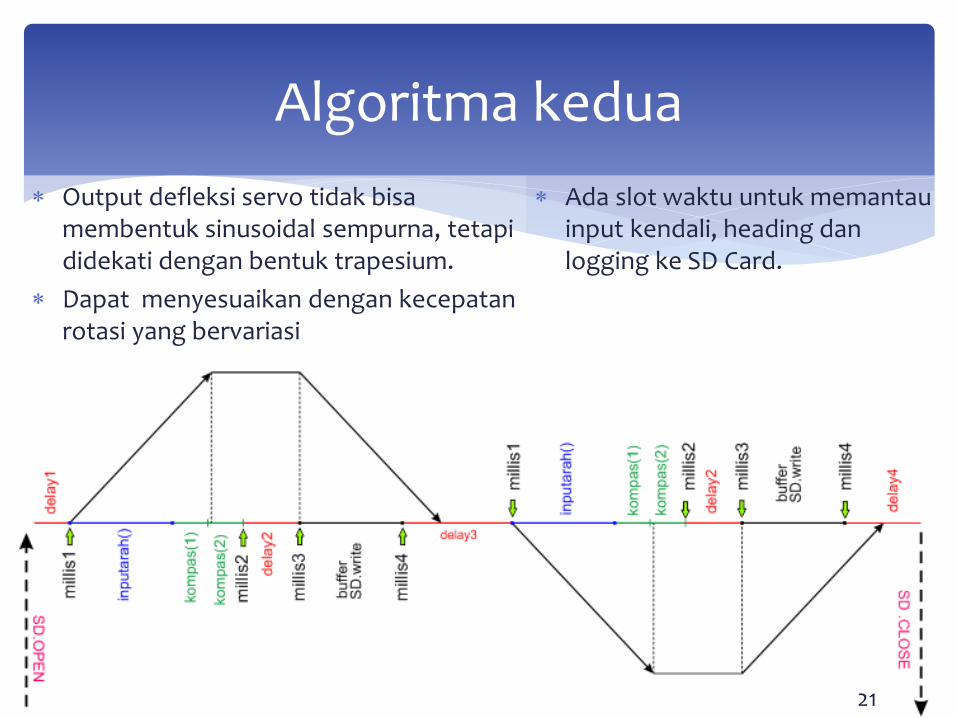
Algoritma kedua
21
Ada slot waktu untuk memantau input kendali, heading dan logging ke SD Card.
Output defleksi servo tidak bisa membentuk sinusoidal sempurna, tetapi didekati dengan bentuk trapesium.
Dapat menyesuaikan dengan kecepatan rotasi yang bervariasi
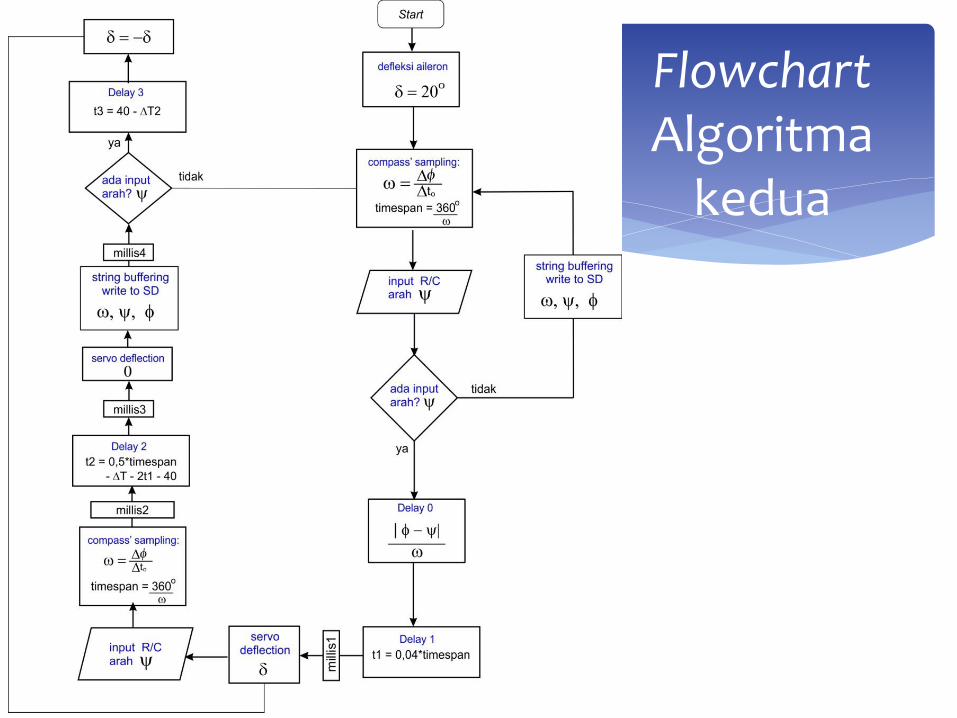
Flowchart Algoritma
kedua
22
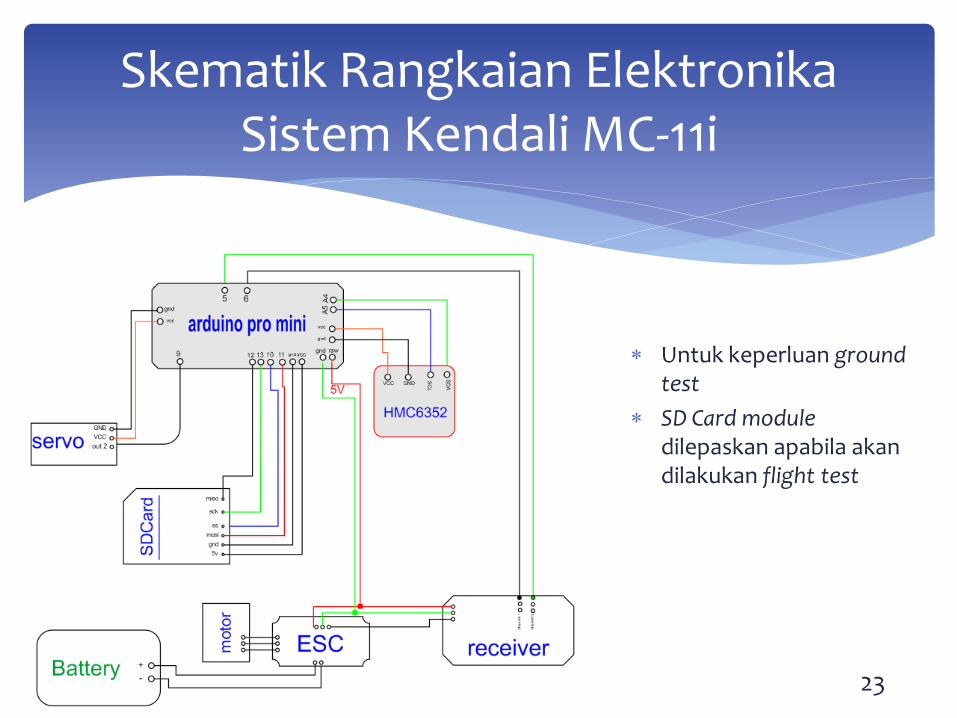
Untuk keperluan ground test
SD Card module dilepaskan apabila akan dilakukan flight test
Skematik Rangkaian Elektronika Sistem Kendali MC-11i
23

Mikrokontroler & Aktuator
Arduino Pro Mini 5V / 16 MHz
Massa 3 gram dan berdimensi 34mm x 18mm x 2mm.
14 pin digital I/O dan 8 pin analog, 3 pin Ground, 3 pin suplai daya
24
sum
be
r g
am
ba
r: s
pa
rkfu
n
HobbyKing mini servo
Massa 4 gram
kecepatan aktuasi yang bisa dicapai ialah 600 per 0.12 detik atau 10 per 2 milidetik.
Tegangan kerja 3.7V ~ 12V
sum
be
r g
amb
ar: H
ob
byK
ing
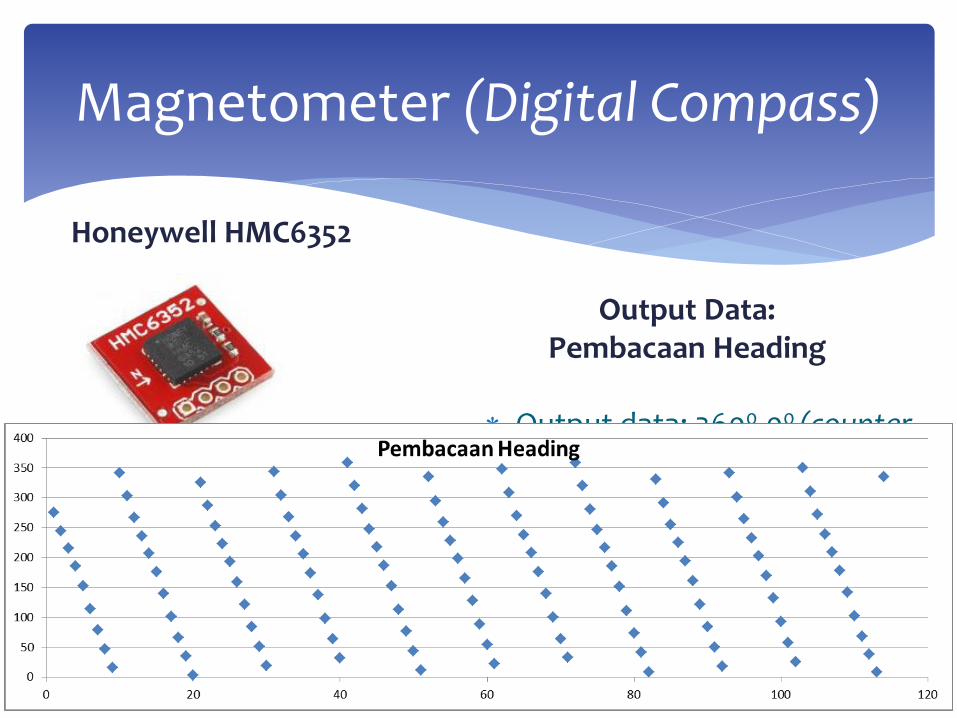
Output data: 3600-00 (counter clockwise)
Magnetometer (Digital Compass)
Honeywell HMC6352
25 sumber gambar: sparkfun
Pembacaan langsung dalam derajat
6 ms heading calculation time
Mini, compact, low power consumption
Wide range magnetic field sensor
I2C interface
Minus fitur tilt compensated
Output Data: Pembacaan Heading
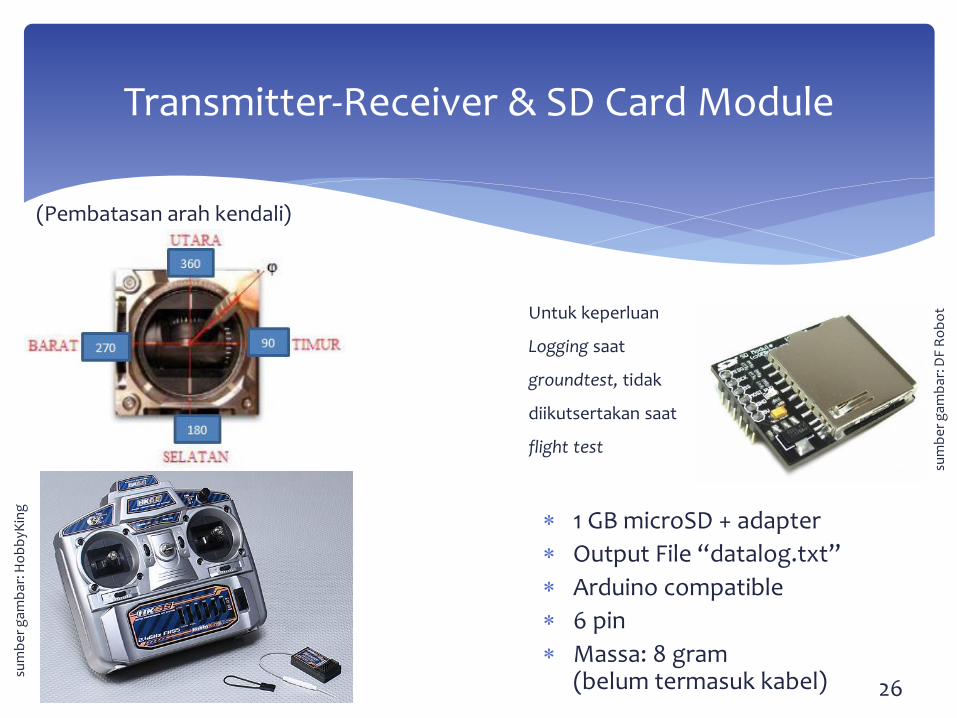
Transmitter-Receiver & SD Card Module
(Pembatasan arah kendali)
26
sum
be
r g
amb
ar: H
ob
byK
ing
Untuk keperluan
Logging saat
groundtest, tidak
diikutsertakan saat
flight test
1 GB microSD + adapter
Output File “datalog.txt”
Arduino compatible
6 pin
Massa: 8 gram (belum termasuk kabel)
sum
be
r g
amb
ar: D
F R
ob
ot

Proses Manufaktur, Assembly dan Uji Terbang
27

Manufaktur Sayap
Partisi sayap
Pelapisan sayap
• Taper, swept • Airfoil tipis • Laser cutting pada balsa
untuk airfoil
• Kertas dodol Warna
merah 28
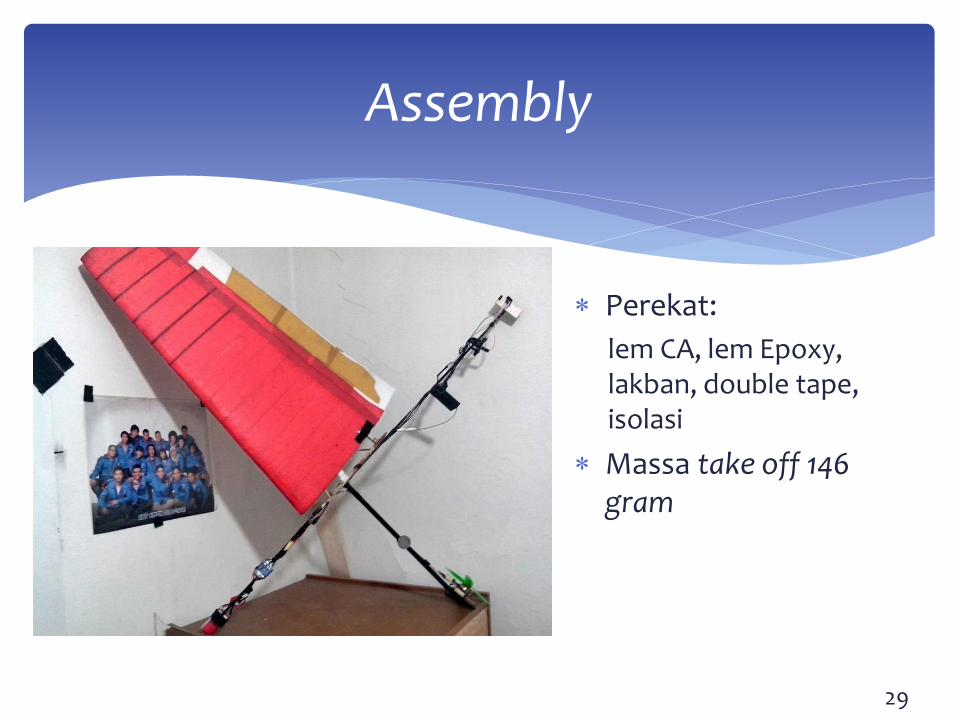
Assembly
Perekat:
lem CA, lem Epoxy, lakban, double tape, isolasi
Massa take off 146 gram
29

Take-Off support
Terbuat dari balsa
Konfigurasi monocopter tidak memungkinkan peluncuran dari tanah
Massa take off bisa lebih ringan
30

Uji Terbang #1 Dilaksanakan di gedung BSCA ITB lantai 4 pada tanggal 22 Februari 2014
31
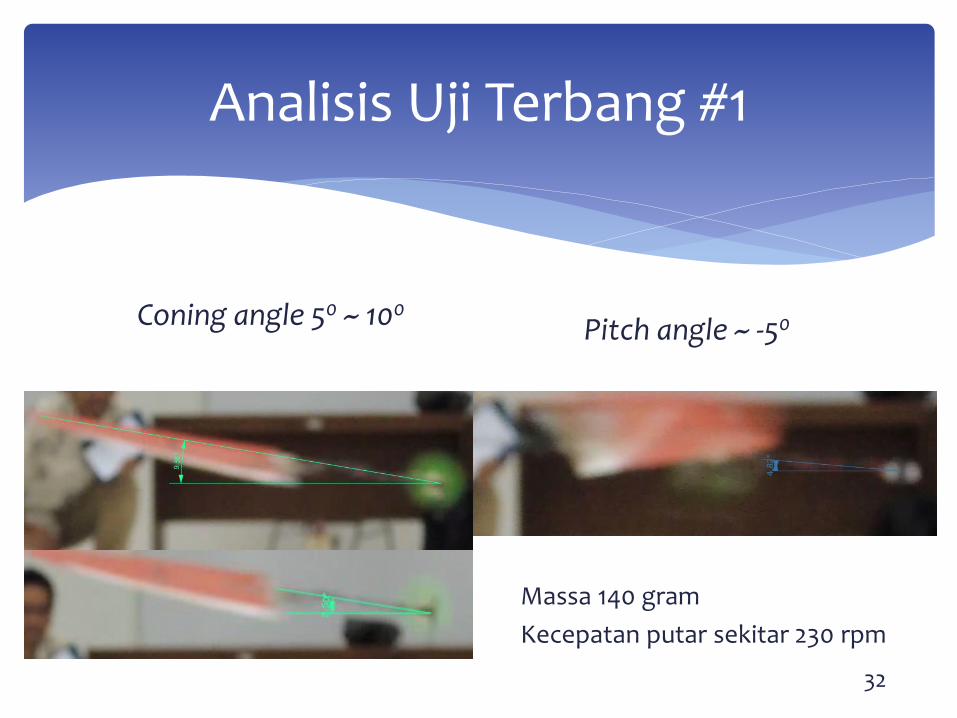
Analisis Uji Terbang #1
Coning angle 50 ~ 100 Pitch angle ~ -50
32
Massa 140 gram
Kecepatan putar sekitar 230 rpm

Uji Terbang #2 di Aula ITB Jatinangor
33
Pada tanggal 9 mei 2014
Analisis Respon Sistem Kendali
34
Massa take off: 146 gram
Kecepatan putar sekitar 240 rpm
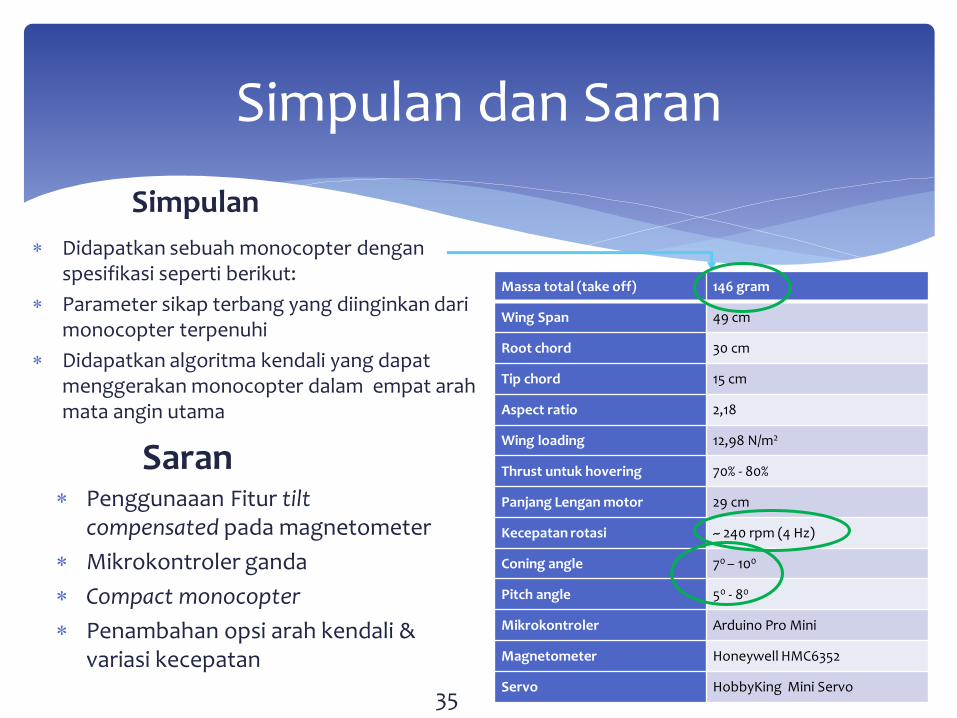
Massa total (take off) 146 gram
Wing Span 49 cm
Root chord 30 cm
Tip chord 15 cm
Aspect ratio 2,18
Wing loading 12,98 N/m2
Thrust untuk hovering 70% - 80%
Panjang Lengan motor 29 cm
Kecepatan rotasi ~ 240 rpm (4 Hz)
Coning angle 70 – 100
Pitch angle 50 - 80
Mikrokontroler Arduino Pro Mini
Magnetometer Honeywell HMC6352
Servo HobbyKing Mini Servo
Simpulan dan Saran
Simpulan
Penggunaaan Fitur tilt compensated pada magnetometer
Mikrokontroler ganda
Compact monocopter
Penambahan opsi arah kendali & variasi kecepatan
Saran
Didapatkan sebuah monocopter dengan spesifikasi seperti berikut:
Parameter sikap terbang yang diinginkan dari monocopter terpenuhi
Didapatkan algoritma kendali yang dapat menggerakan monocopter dalam empat arah mata angin utama
35
Sekian
Terima Kasih
36