robot pemetaan menggunakan jaringan nirkabel...
TRANSCRIPT

ROBOT PEMETAAN MENGGUNAKAN JARINGAN NIRKABEL DAN
ANTARMUKA DELPHI 7
RIZKI FADILLAH
Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas Gunadarma, Margonda Raya
100 Depok 16424 telp (021) 78881112, 7863788
Abstraksi: Robot pemetaan merupakan robot yang dapat memetakan jalan yang telah
dilaluinya kedalam peangkat lunak secara nirkabel. Robot tersebut dapat dikendalikan secara
manual dan dikendalikan secara otomatis jika pengguna hanya ingin memetakan sebuah garis
yang berwarna hitam. Robot pemetan ini dapat digunakan dalam dunia industri dan dunia
otomotif, dimana robot ini akan membuatkan peta jalan yang telah dilaluinya. Robot ini
menggunakan 2 buah motor DC sebagai penggerak robot, 2 buah pemancar/penerima
nirkabel dengan frekuensi yang berbeda untuk proses pemetaan dan kendali manual dari
komputer, 3 buah sensor untuk menjejak garis, dan 1 buah kamera nirkabel sebagai alat
pencitraan bagi pengguna untuk melihat jalan yang akan dilalui oleh robot. Perangkat lunak
yang digunakan sebagai pengantarmukaan adalah Borland Delphi 7 dan port yang digunakan
adalah port serial.
Kata kunci: Antarmuka, Pemetaan, Robot, Nirkabel.
Tanggal pembuatan: 23 Agustus 2011
PENDAHULUAN
Teknologi yang semakin
berkembang membuat orang berpikir
bagaimana membuat sebuah alat yang
dapat membantu kegiatan manusia
dalam menggambar peta jalan dengan
skala yang dapat dipertanggung
jawabkan.
Robot ini juga memudahkan
manusia dalam pekerjaannya dimana
mereka tidak perlu lagi mengendarai
kendaraan untuk membuat peta sebauh
jalan, melainkan hanya tinggal
mengaktifkan robot tersebut dan
mengendalikan robot tersebut melalui
komputer.
Maka dibuatlah suatu alat yaitu
Robot Pemetaan Menggunakan
Jaringan Nirkabel dan Antarmuka
Delphi 7 yang dapat membuat peta
jalan yang telah dilaluinya dengan
menggunakan jaringan nirkabel sebagai
penghubung dengan komputer. Fungsi
komputer pada alat ini adalah sebagai
pengendali robot dan menampilkan peta
perjalanan robot pada layar monitor.
TINJAUAN PUSTAKA
Dioda Infra Merah
Dioda infra merah memiliki semua
dari sifat cahaya yang tampak, namun
tidak dapat melihatnya secara normal.
Cahaya infra merah mempunyai
beberapa keuntungan dimana cocok
digunakan sebagai sensor. Bentuk serta
ukurannya pun hampir tidak jauh
berbeda dengan LED. Dioda infra
merah dapat memancarkan cahaya infra
merah biasa. Dan ini biasanya
digunakan untuk mengontrol VCR atau
TV, Encoder, sistem keamanan dan lain
sebagainya.
Photodioda
Komponen yang dapat menerima
infra merah ini merupakan komponen
yang peka cahaya. Komponen ini akan
merubah energi cahaya, dalam hal ini
energi cahaya infra merah, menjadi
pulsa-pulsa sinyal listrik. Komponen ini
harus mampu mengumpulkan sinyal
infra merah sebanyak mungkin sehingga
pulsa-pulsa sinyal listrik yang
dihasilkan kualitasnya cukup baik.
Semakin besar intensitas infra merah
yang diterima maka sinyal pulsa listrik
yang dihasilkan akan baik jika sinyal
infra merah yang diterima intensitasnya
lemah maka infra merah tersebut harus
mempunyai pengumpul cahaya (light
collector) yang cukup baik dan sinyal
pulsa yang dihasilkan oleh sensor infra
merah ini harus dikuatkan. Pada
prakteknya sinyal infra merah yang
diterima intensitasnya sangat kecil
sehingga perlu dikuatkan.
Selain itu agar tidak terganggu
oleh sinyal cahaya lain maka sinyal
listrik yang dihasilkan oleh sensor infra
merah harus difilter pada frekeunsi
sinyal carrier yaitu pada 30KHz sampai
40KHz. Selanjutnya baik photodioda
maupun phototransistor disebut sebagai
photodetector. Dalam penerimaan infra
merah, sinyal ini merupakan sinyal infra
merah yang termodulasi. Pemodulasian
sinyal data dengan sinyal carrier dengan
frekuensi tertentu akan dapat
memperjauh trasnmisi data sinyal infra.
Gambar 1. dan Kurva Photodioda
Motor DC
Satu dari motor putar
elektromagnetik ditemukan oleh
Michael Faraday ditahun 1821 dan
terdiri dari kawat yang bebas
tergantung yang dimasukkan ke dalam
mercury. Sebuah magnet permanen
diletakkan ditengah-tengah mercury.
Ketika arus listrik mengalir ke kawat.
Kawat tersebut berputar mengelilingi
magnet. Itu menunjukkan arus yang
diberikan bangkit mengedarkan medan
magnet di sekitar kawat. Ini adalah
bentuk termudah dari motor listrik yang
disebut motor homopolar .
.
Gambar 2. Rotasi 1 Motor DC
Motor listrik sederhana, ketika
koil diberi daya, medan magnet
dibangkitkan disekitar sisi kiri dari
armature menekan keluar dari kiri
magnet dan menekan ke arah kanan
yang disebabkan oleh rotasi. Kecepatan
putaran dari motor DC sebanding
dengan tegangan yang diberikan dan
juga sebanding dengan arus listrik yang
diberikan. Pengendali kecepatan dapat
mencapai beberapa tingkat kecepatan
tergantung dari tipe batere yang
diberikan, tegangan yang diberikan,
resistor dan komponen elektronika
lainnya. Di sirkuitnya terbuat dari
tembaga, dan rata-rata tegangan yang
diberikan ke motor bervariasi dengan
pensaklaran, pemberian tegangan sangat
cepat. Variasi “ON” dan “OFF” dapat
mengubah tegangan yang diberikan.
Transistor
Transistor merupakan suatu piranti
semikonduktor yang memiliki sifat
khusus. Secara ekivalen transistor dapat
dibandingkan dengan dua dioda dengan
satu konfigurasi. Transistor memiliki
dua jenis yaitu :
Transistor Unipolar
Transistor Unipolar adalah
transistor yang hanya memiliki
satu buah persambungan kutub,
contohnya : FET
Transistor Bipolar
Transistor Bipolar adalah
transistor yang memiliki dua
persambungan kutub,

contohnya adalah PNP dan
NPN.
Pada dasarnya transistor bekerja
berdasarkan prinsip pengendalian arus
collector dengan menggunakan arus
basis. Dengan kata lain arus basis
mengalami penguatan hingga menjadi
sebesar arus kolector. Penguatan ini
bergantung pada faktor penguatan
masing-masing transistor ( Alpha dan
Beta).
Konfigurasi dasar dari rangkaian
transistor sebagai penguat adalah
common base, common collector, dan
common emitor. Sifat transistor sebagai
penguat akan saturasi pada nilai
tegangan tertentu antara basis dan
emitor menjadikan transistor dapat
berfungsi sebagai saklar elektronik.
Mikrokontroler AT89S51
Mikrokontroler, jika
diterjemahkan secara harfiah, berarti
pengendali yang berukuran mikro.
Sekilas mikrokontroler hampir sama
dengan mikroprosesor. Namun
mikrokontroler memiliki banyak
komponen yang terintegrasi di
dalamnya, misalnya timer/counter.
AT89S51 adalah sebuah
mikrokontroler 8 bit bertenaga rendah
dengan teknologi CMOS berkinerja
tinggi yang dilengkapi memori flash
yang dapat diprogram sebesar 8 Kbyte.
Komponen ini dibuat dengan teknologi
memori atmel yang nonvolatile dan
berkapasitas tinggi serta kompatibel
dengan set instruksi dan pin out standar
industri 80CSI. Flash on-chip
memungkinkan memori program
diprogram ulang dalam sistem atau oleh
pemrograman memori nonvolatile yang
konvensional. Dengan menggunakan
CPU 8 bit dengan flash yang diprogram
dari sistem dalam sebuah monolithic
ship, Atmel AT89S51 adalah sebuah
mikrokontroler yang sangat baik untuk
menyediakan solusi yang sangat
fleksibel dan efektif dalam biaya, untuk
banyak dalam masalah aplikasi, serta
untuk mengontrol modul tambahan.
Gambar 3. Pin Mikrokontroller
AT89S51
Oscillator disingkat dengan OSC.
Rangkaian elektronika yang berfungsi
sebagai pembangkit frekuensi tinggi.
Koneksi dengan on-chip oscillator pada
Mikrokontroler AT89S51 terdiri dari
dua pin yaitu XTAL1 dan XTAL2.
Oscillator yang disediakan pada
chip dikemudikan dengan XTAL yang
dihubungkan pada pin 18 dan pin 19.
Diperlukan kapasitor penstabil sebesar
10 pF. Besar nilai XTAL sekitar 3 MHz
sampai 33 MHz. XTAL1 adalah input
ke pembalikan penguat oscillator
(inverting oscillator amplifier) dan
input ke clock internal pengoperasian
rangkaian. Sedangkan XTAL2 adalah
output dari pembalikan penguat
oscillator.
Gambar 4. Rangkaian Crystal
XTAL/CRYSTAL adalah
komponen yang menghasilkan clock
yang bisa mengatur frekuensi dengan
tepat dan tak akan berubah - ubah.
Penguat Operasional (OP-AMP)
Op-amp adalah suatu komponen
elektronik terintegrasi (IC) yang
memiliki fungsi umum maupun fungsi
khusus, tergantung jenis Op-amp yang
digunakan. Dalam karya tulis ini
dibutuhkan suatu komparator. Op-amp
yang lazim digunakan untuk operasi
komparator adalah jenis OP-amp
LM324.
IC LM 324 merupakan salah satu
IC Op-Amp dimana IC ini memiliki Op-
Amp sebanyak 4 buah. IC ini berfungsi
sebagai pembanding dua buah tegangan
yang masuk sebagai input. Seperti yang
ditunjukkan pada gambar 7, IC LM324
digunakan untuk menerima masukan
dari sensor penerima yaitu Photodioda.
Prinsip dasar dari rangkaian diatas
adalah validasi tegangan seperti yang
ditunjukkan pada gambar 2.9, dimana
validasi tegangan disini
membandingkan inputan yang masuk di
kaki inverting dan kaki non-inverting
apabila perbandingan bernilai positif
maka tegangan output akan bernilai
90% dari +Vcc dan apabila perbadingan
bernilai negative maka bernilai 90 %
dari – Vcc.
Vb=Va=0 Vout=0
Vb-Va>0 Vout= saturasi positif
Vb-Va<0 Vout= saturasi negatif
Persamaannya komparator adalah
sebagai berikut:
Interface Pengendali (Driver)
Suatu driver adalah system
penghubung antara mikrokontroler
dengan system yang akan dikendalikan.
Dalam hal ini system yang dimaksud
adalah motor penggerak conveyor.
Dewasa ini sudah dikenal berbagai
driver dengan fungsi khusus. Untuk
kebutuhan perancangan sistem, dipilih
driver motor tipe IC L293D.
IC L293D ini adalah suatu bentuk
rangkaian daya tinggi terintegrasi yang
mampu melayani 4 buah beban dengan
arus nominal 600mA hingga maksimum
1.2 A. Keempat channel inputnya
didesain untuk dapat menerima
masukan level logika TTL. Biasa
dipakai sebagai driver relay, motor DC,
motor steper maupun pengganti
transistor sebagai saklar dengan
kecepatan switching mencapai 5kHz.
Driver tersebut berupa dua pasang
rangkaian h-bridge yang masing-masing
dikendalikan oleh enable 1 dan enable
2.
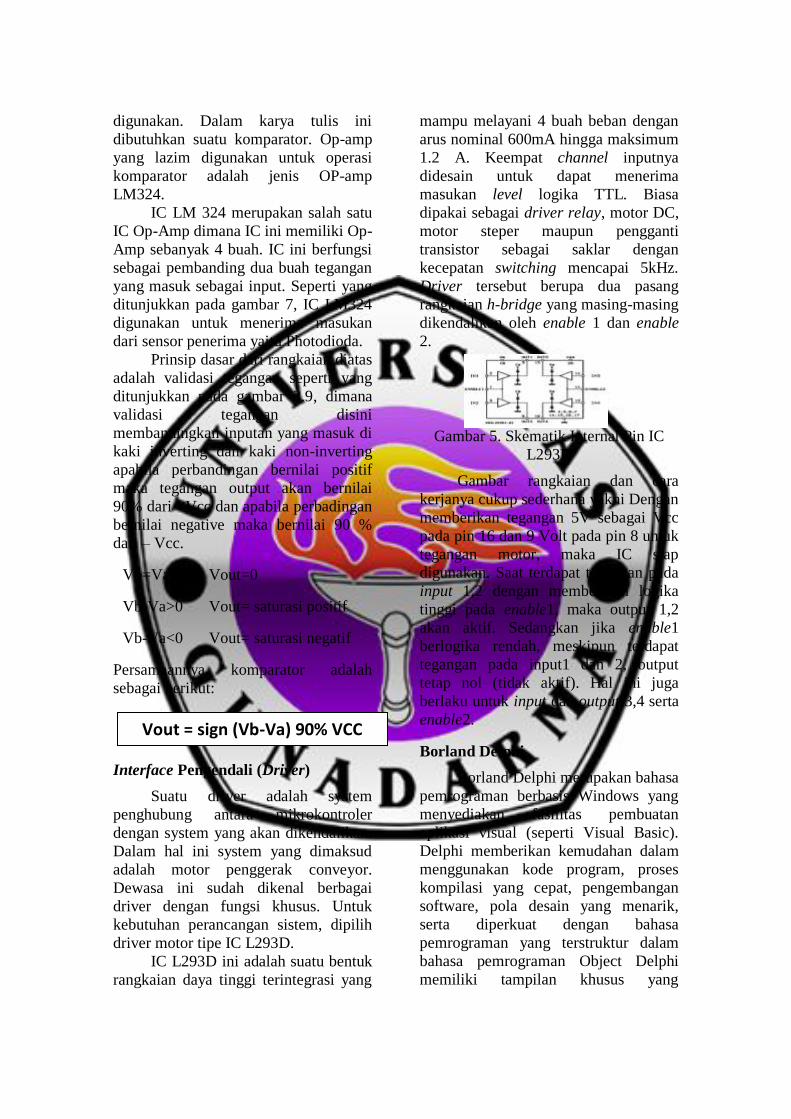
Gambar 5. Skematik Internal Pin IC
L293D
Gambar rangkaian dan cara
kerjanya cukup sederhana yakni Dengan
memberikan tegangan 5V sebagai Vcc
pada pin 16 dan 9 Volt pada pin 8 untuk
tegangan motor, maka IC siap
digunakan. Saat terdapat tegangan pada
input 1,2 dengan memberikan logika
tinggi pada enable1, maka output 1,2
akan aktif. Sedangkan jika enable1
berlogika rendah, meskipun terdapat
tegangan pada input1 dan 2, output
tetap nol (tidak aktif). Hal ini juga
berlaku untuk input dan output 3,4 serta
enable2.
Borland Delphi
Borland Delphi merupakan bahasa
pemrograman berbasis Windows yang
menyediakan fasilitas pembuatan
aplikasi visual (seperti Visual Basic).
Delphi memberikan kemudahan dalam
menggunakan kode program, proses
kompilasi yang cepat, pengembangan
software, pola desain yang menarik,
serta diperkuat dengan bahasa
pemrograman yang terstruktur dalam
bahasa pemrograman Object Delphi
memiliki tampilan khusus yang
Vout = sign (Vb-Va) 90% VCC

didukung suatu lingkup kerja komponen
Delphi untuk membangun suatu aplikasi
dengan menggunakan Visual
Component Library (VCL).
Kode ASCII
Kode Standar Amerika untuk
Pertukaran Informasi atau ASCII
(American Standard Code for
Information Interchange) merupakan
suatu standar internasional dalam kode
huruf dan simbol seperti Hex dan
Unicode tetapi ASCII lebih bersifat
universal, contohnya 124 adalah untuk
karakter "|". Ia selalu digunakan oleh
komputer dan alat komunikasi lain
untuk menunjukkan teks. Kode ASCII
sebenarnya memiliki komposisi
bilangan biner sebanyak 8 bit. Dimulai
dari 0000 0000 hingga 1111 1111. Total
kombinasi yang dihasilkan sebanyak
256, dimulai dari kode 0 hingga 255
dalam sistem bilangan.
Modulasi
Modulasi adalah proses perubahan
(varying) suatu gelombang periodik
sehingga menjadikan suatu sinyal
mampu membawa suatu informasi.
Dengan proses modulasi, suatu
informasi (biasanya berfrekeunsi
rendah) bisa dimasukkan ke dalam
suatu gelombang pembawa, biasanya
berupa gelombang sinus berfrekuensi
tinggi. Terdapat tiga parameter kunci
pada suatu gelombang sinusiuodal
yaitu : amplitudo, fase dan frekuensi.
Ketiga parameter tersebut dapat
dimodifikasi sesuai dengan sinyal
informasi (berfrekuensi rendah) untuk
membentuk sinyal yang termodulasi.
Peralatan untuk melaksanakan
proses modulasi disebut modulator,
sedangkan peralatan untuk memperoleh
informasi informasi awal (kebalikan
dari dari proses modulasi) disebut
demodulator dan peralatan yang
melaksanakan kedua proses tersebut
disebut modem. Informasi yang dikirim
bisa berupa data analog maupun digital
sehingga terdapat dua jenis modulasi
yaitu :
modulasi analaog
modulasi digital
PERANCANGAN DAN
IMPLEMENTASI
Gambaran Umum Robot Pemetaan
Menggunakan Jaringan Nirkabel dan
Antarmuka Delphi 7
Robot Pemetaan Menggunakan
Jaringan Nirkabel dan Antarmuka
Delphi 7 ini merupakan suatu robot
yang dapat memetakan jalan yang
dilaluinya ke perangkat komputer
melalui perangkat nirkabel. Jaringan
nirkabel berfungsi sebagai pengendali
manual dan untuk memetakan posisi
robot.
Robot dapat dikendalikan secara
otomatis maupun dikendalikan secara
manual oleh pengguna. Kendali
otomatis pada robot menggunakan
sensor infra merah dan photo dioda.
Sedangkan kendali manual dengan cara
mengklik tombol pada
pengantarmukaan Delphi 7 atau dengan
menekan tombol pada keyboard. Pada
pengantarmukaan Delphi 7, terdapat
tampilan dari kamera wireless yang di
tempatkan pada bagian atas robot
pemetaan.
Ketika robot pemetaan
dikendalikan secara manual, robot akan
menerima data yang dikirimkan oleh
pemancar yang terhubung ke komputer
melalui jaringan nirkabel. Ketika
kendali di rubah menjadi otomatis,
maka robot pemetaan akan kembali
mengikuti garis hitam.
Perancangan Robot Pemetaan
Robot Pemetaan Menggunakan
Jaringan Nirkabel dan Antarmuka
Delphi 7 ini terdiri atas dua rangkaian
utama Penerima/Pemancar yang
terhubung dengan komputer dan robot
pemetaan itu sendiri. Secara umum
kedua rangkaian tersebut digambarkan
seperti pada gambar 6.
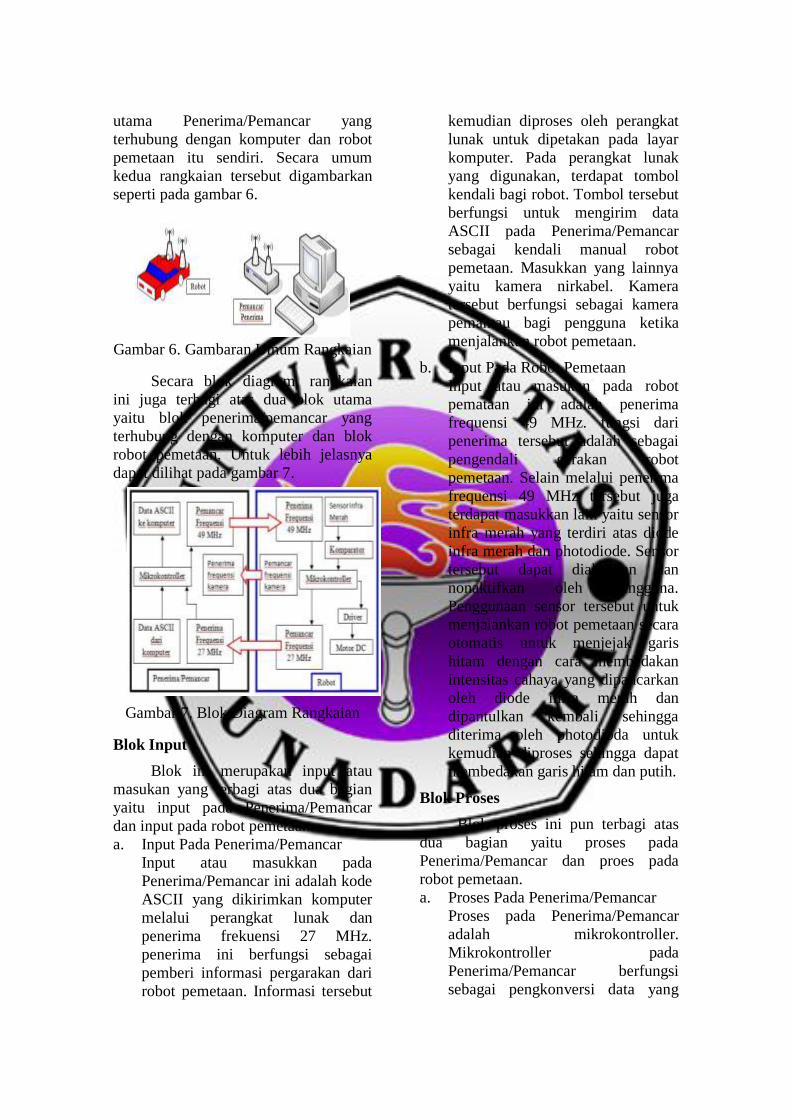
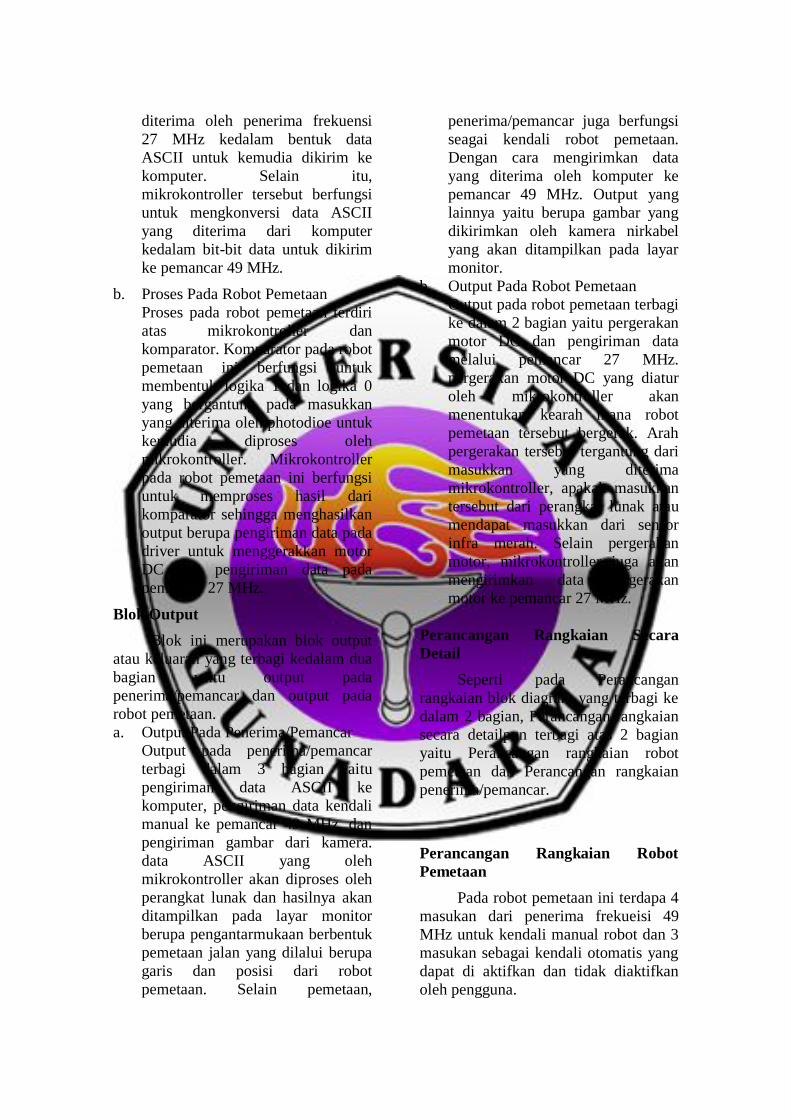
Gambar 6. Gambaran Umum Rangkaian
Secara blok diagram, rangkaian
ini juga terbagi atas dua blok utama
yaitu blok penerima/pemancar yang
terhubung dengan komputer dan blok
robot pemetaan. Untuk lebih jelasnya
dapat dilihat pada gambar 7.
Gambar 7. Blok Diagram Rangkaian
Blok Input
Blok ini merupakan input atau
masukan yang terbagi atas dua bagian
yaitu input pada Penerima/Pemancar
dan input pada robot pemetaan.
a. Input Pada Penerima/Pemancar
Input atau masukkan pada
Penerima/Pemancar ini adalah kode
ASCII yang dikirimkan komputer
melalui perangkat lunak dan
penerima frekuensi 27 MHz.
penerima ini berfungsi sebagai
pemberi informasi pergarakan dari
robot pemetaan. Informasi tersebut
kemudian diproses oleh perangkat
lunak untuk dipetakan pada layar
komputer. Pada perangkat lunak
yang digunakan, terdapat tombol
kendali bagi robot. Tombol tersebut
berfungsi untuk mengirim data
ASCII pada Penerima/Pemancar
sebagai kendali manual robot
pemetaan. Masukkan yang lainnya
yaitu kamera nirkabel. Kamera
tersebut berfungsi sebagai kamera
pemantau bagi pengguna ketika
menjalankan robot pemetaan.
b. Input Pada Robot Pemetaan
Input atau masukan pada robot
pemataan ini adalah penerima
frequensi 49 MHz. fungsi dari
penerima tersebut adalah sebagai
pengendali gerakan robot
pemetaan. Selain melalui penerima
frequensi 49 MHz tersebut juga
terdapat masukkan lain yaitu sensor
infra merah yang terdiri atas diode
infra merah dan photodiode. Sensor
tersebut dapat diaktifkan dan
nonaktifkan oleh pengguna.
Penggunaan sensor tersebut untuk
menjalankan robot pemetaan secara
otomatis untuk menjejak garis
hitam dengan cara membedakan
intensitas cahaya yang dipancarkan
oleh diode infra merah dan
dipantulkan kembali sehingga
diterima oleh photodioda untuk
kemudian diproses sehingga dapat
membedakan garis hitam dan putih.
Blok Proses
Blok proses ini pun terbagi atas
dua bagian yaitu proses pada
Penerima/Pemancar dan proes pada
robot pemetaan.
a. Proses Pada Penerima/Pemancar
Proses pada Penerima/Pemancar
adalah mikrokontroller.
Mikrokontroller pada
Penerima/Pemancar berfungsi
sebagai pengkonversi data yang
diterima oleh penerima frekuensi
27 MHz kedalam bentuk data
ASCII untuk kemudia dikirim ke
komputer. Selain itu,
mikrokontroller tersebut berfungsi
untuk mengkonversi data ASCII
yang diterima dari komputer
kedalam bit-bit data untuk dikirim
ke pemancar 49 MHz.
b. Proses Pada Robot Pemetaan
Proses pada robot pemetaan terdiri
atas mikrokontroller dan
komparator. Komparator pada robot
pemetaan ini berfungsi untuk
membentuk logika 1 dan logika 0
yang bergantung pada masukkan
yang diterima oleh photodioe untuk
kemudia diproses oleh
mikrokontroller. Mikrokontroller
pada robot pemetaan ini berfungsi
untuk memproses hasil dari
komparator sehingga menghasilkan
output berupa pengiriman data pada
driver untuk menggerakkan motor
DC dan pengiriman data pada
pemancar 27 MHz.
Blok Output
Blok ini merupakan blok output
atau keluaran yang terbagi kedalam dua
bagian yaitu output pada
penerima/pemancar dan output pada
robot pemetaan.
a. Output Pada Penerima/Pemancar
Output pada penerima/pemancar
terbagi dalam 3 bagian yaitu
pengiriman data ASCII ke
komputer, pengiriman data kendali
manual ke pemancar 49 MHz, dan
pengiriman gambar dari kamera.
data ASCII yang oleh
mikrokontroller akan diproses oleh
perangkat lunak dan hasilnya akan
ditampilkan pada layar monitor
berupa pengantarmukaan berbentuk
pemetaan jalan yang dilalui berupa
garis dan posisi dari robot
pemetaan. Selain pemetaan,
penerima/pemancar juga berfungsi
seagai kendali robot pemetaan.
Dengan cara mengirimkan data
yang diterima oleh komputer ke
pemancar 49 MHz. Output yang
lainnya yaitu berupa gambar yang
dikirimkan oleh kamera nirkabel
yang akan ditampilkan pada layar
monitor.
b. Output Pada Robot Pemetaan
Output pada robot pemetaan terbagi
ke dalam 2 bagian yaitu pergerakan
motor DC dan pengiriman data
melalui pemancar 27 MHz.
pergerakan motor DC yang diatur
oleh mikrokontroller akan
menentukan kearah mana robot
pemetaan tersebut bergerak. Arah
pergerakan tersebut tergantung dari
masukkan yang diterima
mikrokontroller, apakah masukkan
tersebut dari perangkat lunak atau
mendapat masukkan dari sensor
infra merah. Selain pergerakan
motor, mikrokontroller juga akan
mengirimkan data pergerakan
motor ke pemancar 27 MHz.
Perancangan Rangkaian Secara
Detail
Seperti pada Perancangan
rangkaian blok diagram yang terbagi ke
dalam 2 bagian, Perancangan rangkaian
secara detailpun terbagi atas 2 bagian
yaitu Perancangan rangkaian robot
pemetaan dan Perancangan rangkaian
penerima/pemancar.
Perancangan Rangkaian Robot
Pemetaan
Pada robot pemetaan ini terdapa 4
masukan dari penerima frekueisi 49
MHz untuk kendali manual robot dan 3
masukan sebagai kendali otomatis yang
dapat di aktifkan dan tidak diaktifkan
oleh pengguna.

Pada bagian proses, IC yang
digunakan adlah IC komparator LM 324
dan IC mikrokontroller AT89S51.
Mikrokontroller tersebut telah
diprogram menggunakan bahasa
assembler. Untuk outputnya
menggunakan dua bua motor DC untuk
menggerakkan robot dan 1 buah
pemancar 27 MHz untuk mengirim data
pergerakan motor ke emancar/penerima.
Skematik dari rangkaian dapat dilihat
pada gambar 8.
Gambar 8. Skematik Robot Pemetaan
Pada rangkaian, seluruh
masukkannya terhubung ke port 0. Port
0.0, port 0.1, dan port 0.2 merupakan
masukkan dari sensor infra merah.
Masukkan ini merupakan masukkan
untuk proses penjejakan garis hitam
pada robot pemetaan.
Penerima frekuensi 49 MHz
terhubung pada port 0.3 sampai dengan
port 0.7. penerima ini juga berfugsi
sebagai masukan yang diterima dari
pemancar 49 MHz sebagai kendali
manual. Pada mikrokontroller, port 0.7
digunakan sebagai interupsi dari
pergerakan otomatis robot untuk
dikendalikan secara manual. Ketika
komputer mengirim data untuk
memberikan logika 0 pada port 0.7,
secara otomatis robot pemetaan akan
berhenti dan dapat dikendalikan secara
manual. Berikut tabel pergerakan robot
pemetaan dan data yang dikirim
berdasarkan masukkan yang diterima:
Tabel 1.
Pergerakan Robot dan Data yang
Dikirimkan Masukan
Pada
Port 0
(Hex)
Keluaran
Pada Port
1 (hex)
Arah
Gerak
Robot
Data
Yang
Dikirim
(biner)
FF 00 Diam -
FE 89 Maju 1000
FC 48 Kanan 0100
FD 48 Kanan 0100
FA 21 Kiri 0010
FB 21 Kiri 0010
7X* 1F Diam 0001
BX* 89 Maju 1000
DX* 4A Kanan 0100
EX* 25 Kiri 0100
3X# 1F Diam 0001
Sumber : Ardhian(2010)
Ket: * = Robot dalam kendali manual
# = Robot dalam titik percabangan
Pada saat komputer mengirim
data untuk mengendalikan robot secara
manual, pergerakan robot akan berhenti
pada saat itu juga dan dapat
dikendalikan saat itu juga karena pada
program assembler yang dimasukkan
kedalam mikrokontroller menempatkan
interupsi dari port 0.7 diposisi utama.
Gambar 9. Skematik Sensor Infra
Merah
Pada gambar 9, ketika diode infra
merah memancarkan cahaya infra
merah kearah lantai berwarna putih,
maka cahaya infra merah tersebut
dipantulkan kearah photodiode.
Sedangkan ketika diode infra merah
memancar cahaya infra merah ke lantai
berwarna hitam, maka cahaya infra
merah tersebut akan diserap oleh warna
hitam tesebut dan hanya sedikit
dipantulkan ke arah photodiode. Hal ini
menyebabkan perubahan tegangan pada
kaki inverting dari komparator.

Perubahan tegangan pada kaki
non inverting tersebut akan di proses
oleh komparator untuk menghasilkan
logika 1 dan logika 0 tergantung dari
masukan yang diterima kaki inverting
dengan pengkalibrasian terlebih dahulu
tegangan yang diberikan pada kaki non
inverting. Dalam perancangan alai ini,
ketika cahaya yang dipancarkan oleh
diode infra mengenai warna hitam,
logika yang dihasilkan oleh komparator
bernilai 0 dan sebaliknya, ketika
mengenai warna putih, komparator akan
menghasilkan logika 1.
Perancangan Rangkaian
Penerima/Pemancar
Pada penerima/pemancar
masukkan berasal dari data ASCII yang
dikirimkan computer dan diterimakan
oleh mikrokontroller melalui port serial.
Proses pada penerima dalah
mikrokontroller. Mikrokontroller pada
alat ini berfungsi sebagai saluran
masukkan dan keluaran dimana
pengiriman data ke pemancar frekuensi
49 MHz dan penerimaan data ASCII
dari computer dapat dilakukan dalam
waktu yang hampur bersamaan.
Pengiriman data dari computer ke
mikrokontroller digunakan untuk
pengendalian manual robot, sedangkan
pengiriman data dari mikrokontroller ke
computer digunakan untuk memetakan
posisi robot. Data yang dikirim oleh
pemancar frekuensi 27 MHz pada robot
dan diterima oleh penerima/pemancar
berupa bit-bit data. Oleh
mikrokontroller bit-bit data tersebut
diubah ke dalam kode ASCII dan
dikirimkan melalui port serial ke
computer. Kode ASCII tersebut akan
diproses oleh perangkat lunak di
computer sehingga computer tersebut
akan memetakan pergerakan dari robot
tersebut kedalam sebuah tampilan pada
layar computer.
Gambar 10. Skematik Rangkaian
Pemancar/Penerima
Data yang diterima oleh penerima
frekuensi 27 MHz adalah 4 bit data dan
dihubungkan ke port 2.0 sampai port
2.3. Port 2 tersebut pada awal
pendeklarasian program di berikan nilai
4Fh. Pada MSB (Most Significant Bit)
diberikan nilai 4 dan LSB (Least
Significant Bit) diberikan nilai F. hal ini
dikarenakan nilai dari port 2 akan
dikirim ke port serial. Karena komputer
akan menerima kode ASCII, maka
pemberian nilai 4 pada MSB
dimaksudkan untuk mengirimkan huruf
kapital ke komputer. Pada LSB
diberikan nilai F karena inputan
terdapat pada LSB tersebut.
Mikrokontroller diprogram untuk
mengirim data port 2 ke port serial
setiap kali perubahan data. Berikut tabel
pergerakan robot, data dan kode ASCII
yang dikirimkan ke komputer.
Tabel 2.
Pergerakan Robot, Data dan Kode
ASCII Yang Dikirimkan Ke
Komputer Arah
Gerak
Robot
Data
Yang
Diterima
Nilai Pada
Port 2
(bin)
Nilai
Pada
Port 2
(Hex)
Kod
e
AS
CII
Maju 1110 01001110 4E N
Kanan 1011 01001011 4B K
Kiri 1101 01001101 4D M
Diam* 0111 01000111 47 G
Diam# 0110 01000110 46 F
Sumber : Ardhian (2010)
Ket: * = Robot dalam kendali manual
# = Robot dalam titik percabangan

Data yang diterima oleh komputer
tersebut selanjutnya akan diproses oleh
perangkat lunak untuk menghasilkan
pemetaan posisi robot pada layar
komputer. Perbandingan peta yang
berada di dalam perangkat lunak dengan
peta perjalanan dari komputer berskala
1:2. Perancangan awal perangkat lunak
dapat dilihat pada gambar 11.
Gambar 11. Perancangan Perangkat
Lunak Pada Komputer
Ketika pertama kali perangkat
lunak di jalankan, terdapat 5 buah
tombol dan 1 buah main menu. Tombol
pertama ialah tombol kendali manual,
yang berfungsi untuk menampilkan
tombol kendali manal seperti untuk
tombol maju agar robot bergerak maju
dan gambar pada perangkat lunak pun
bergerak maju sesuai dengan
pergerakan robot. Tombo kedua ialah
tombol informasi, yang berfungsi untuk
menampilkan informasi tentang
pergerakan robot. Tombol ketiga ialah
tombol exit, yang berfungsi untuk
mengeluarkan jendela perangkat lunak.
Tombol keempat ialah tombol rubah
warna, yang berfungsi untuk merubah
warna garis yang menjadi tanda
pergerakan robot, namun warna garis
tidak akan berubah, karena garis
tercetak secara otomatis. Tombol
kelima ialah tombol snapshot, yang
berfungsi seperti tombol pada kamera
digital, yaitu untuk mengambil gambar
dari kamera wireless. Mainmenu pada
pojok kiri atas berfungsi untuk
menampilkan hasil pencitraan pada
kamera wirelees yang menenpel pada
robot ke dalam perangkat lunak.
Tampilan ketika perangkat lunak
pertama kali di jalankan dapat dilihat
pada gambar 12.
Gambar 12. Pertama Kali Perangkat
Lunak di Jalankan
Untuk menampilkan hasil
pencitraan dari kamera wireless, yaitu
dengan cara mengklik mainmenu
Device yang berada di pojok kiri atas.
Setelah mengklik mainmenu, kemudian
akan tampil pilihan dengan nama
konektor antara komputer dengan
penerima kamera wireless. Setelah
nama konektor diklik, maka akan
muncul pencitraan dari kamera wireless
pada perangkat lunak. Hasil pencitraan
yang telah terdapat di dalam perangkat
lunak dapat dilihat pada gambar 13.
Gambar 13. Hasil Pencitraan yang
Tampil pada Perangkat Lunak
Ketika perangkat lunak pertama
kali dijalankan, pada gambar 13 tombol
kendali manual telah dipilih yang
berarti pergerakan robot dapat
dikendalikan secara manual oleh
pengguna. Ketika pergerakan robot
dikendalikan secara otomatis, maka
timer 1 akan menunggu masukkan dari
Penerima/Pemancar. Jika data yang
diterima sesuai dengan data pada tabel
2, maka gambar tanda panah pada robot
akan bergerak sesuai dengan pergerakan
robot. Gambar tanda panah tersebut
mengindikasikan bagian depan dan
posisi robot pemtaan. Jika robot
berotasi, maka tanda panah pada
perangkat lunak pun akan berotasi
sesuai dengan arah rotasi robot
pemetaan. Pergerakan robot dapat
dilihat pada gambar 14.
Gambar 14. Pergerakan Robot dan Hasil
Pemetaan dari Pergerakan Robot
Diagram Alur (Flow Chart)
Diagram alur atau flowchart
pada alat ini terdiri atas 3 bagian yaitu,
diagram alur dari robot pemetaan,
diagram alur dari dari
penerima/pemancar, dan diagram alur
dari perangkat lunak. Berikut
penjelasan dari masing-masing
diagram alur tersebut:
Diagram Alur Robot Pemetaan
Pada diagram alur robot
pemetaan, masukkan yang utama adalah
dari penerima frekuensi 49 MHz. Hal
ini dikarenakan masukkan tersebut
berfungsi untuk kendali manual. Dari
diagram alur juga bisa kita lihat bahwa
setiap kali robot bergerak baik dalam
kendali manual maupun kendali
otomatis robot akan mengirimkan data
ke pemancar 27 MHz. Data yang
dikirim itu akan diterima oleh penerima,
dan data inilah yang akan menjadi data
dalam pemetaan pergerakkan robot pada
computer. Pada diagram alur, terdapat 2
masukkan penerima frekuensi 49 MHz.
Hal ini dikarenakan ketika robot dalam
kendali manual robot tersebut tidak
akan menerima masukkan selain
masukkan dari penerima frekuensi 49
MHz.
Gambar 15. Diagram Alur Robot
Pemetaan
Diagram Alur Penerima/Pemancar
Diagram alur untuk
Penerima/Pemancar tidak serumit
diagram alur robot pemetaan. Diagram
alur Penerima/Pemancar dapat
dikatakan sangat sederhana. Setelah
inisialisasi alat untuk komunikasi serial,
masukan utama adalah masukan dari
komputer melalui port com.
Nilai pada port 1 tidak tetap,
melaikan selalu berubah-ubah sesuai
masukkan pada port 1. Port 1 sendri
terhubung dengan pemancar 49 MHz.
Selanjutnya, mikrokontroller akan
menerima masukkan dari penerima 27
MHz yang terhubung dengan port 2.
Data pada port 2 akan diproses oleh
komputer yang dikirm melalui port
com. Untuk lebih jelasnya dapat dilihat
pada gambar 16.
Gambar 16. Diagram Alur
Penerima/Pemancar
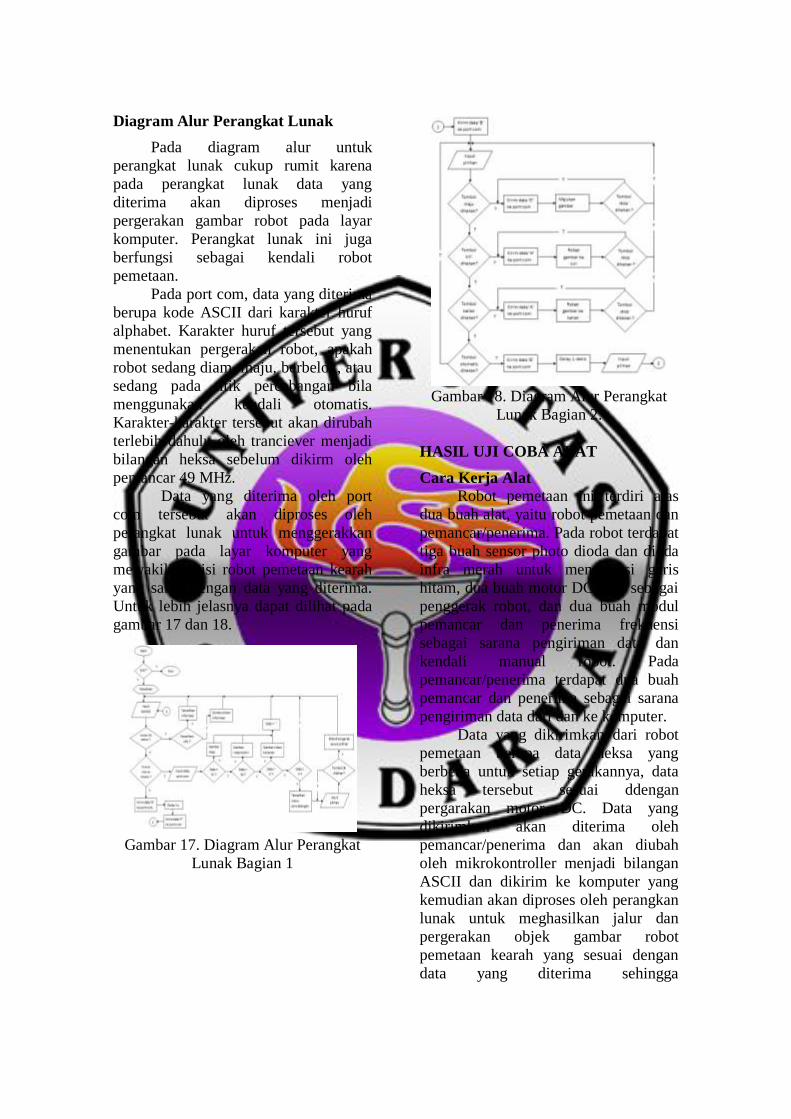
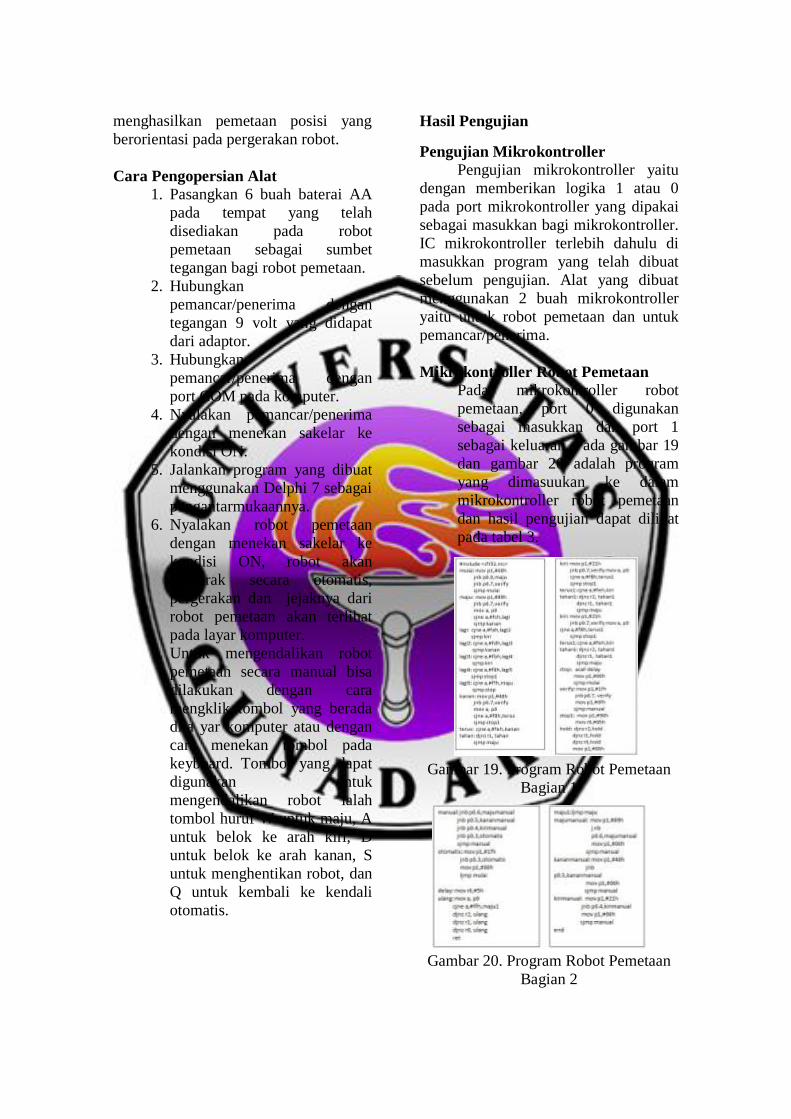
Diagram Alur Perangkat Lunak
Pada diagram alur untuk
perangkat lunak cukup rumit karena
pada perangkat lunak data yang
diterima akan diproses menjadi
pergerakan gambar robot pada layar
komputer. Perangkat lunak ini juga
berfungsi sebagai kendali robot
pemetaan.
Pada port com, data yang diterima
berupa kode ASCII dari karakter huruf
alphabet. Karakter huruf tersebut yang
menentukan pergerakan robot, apakah
robot sedang diam, maju, berbelok, atau
sedang pada titik percabangan bila
menggunakan kendali otomatis.
Karakter-karakter tersebut akan dirubah
terlebih dahulu oleh tranciever menjadi
bilangan heksa sebelum dikirm oleh
pemancar 49 MHz.
Data yang diterima oleh port
com tersebut akan diproses oleh
perangkat lunak untuk menggerakkan
gambar pada layar komputer yang
mewakili posisi robot pemetaan kearah
yang sama dengan data yang diterima.
Untuk lebih jelasnya dapat dilihat pada
gambar 17 dan 18.
Gambar 17. Diagram Alur Perangkat
Lunak Bagian 1
Gambar 18. Diagram Alur Perangkat
Lunak Bagian 2.
HASIL UJI COBA ALAT
Cara Kerja Alat
Robot pemetaan ini terdiri atas
dua buah alat, yaitu robot pemetaan dan
pemancar/penerima. Pada robot terdapat
tiga buah sensor photo dioda dan dioda
infra merah untuk menditeksi garis
hitam, dua buah motor DC 12V sebagai
penggerak robot, dan dua buah modul
pemancar dan penerima frekuensi
sebagai sarana pengiriman data dan
kendali manual robot. Pada
pemancar/penerima terdapat dua buah
pemancar dan penerima sebagai sarana
pengiriman data dari dan ke komputer.
Data yang dikirimkan dari robot
pemetaan berupa data heksa yang
berbeda untuk setiap gerakannya, data
heksa tersebut sesuai ddengan
pergarakan motor DC. Data yang
dikirimkan akan diterima oleh
pemancar/penerima dan akan diubah
oleh mikrokontroller menjadi bilangan
ASCII dan dikirim ke komputer yang
kemudian akan diproses oleh perangkan
lunak untuk meghasilkan jalur dan
pergerakan objek gambar robot
pemetaan kearah yang sesuai dengan
data yang diterima sehingga
menghasilkan pemetaan posisi yang
berorientasi pada pergerakan robot.
Cara Pengopersian Alat
1. Pasangkan 6 buah baterai AA
pada tempat yang telah
disediakan pada robot
pemetaan sebagai sumbet
tegangan bagi robot pemetaan.
2. Hubungkan
pemancar/penerima dengan
tegangan 9 volt yang didapat
dari adaptor.
3. Hubungkan
pemancar/penerima dengan
port COM pada komputer.
4. Nyalakan pemancar/penerima
dengan menekan sakelar ke
kondisi ON.
5. Jalankan program yang dibuat
menggunakan Delphi 7 sebagai
pengantarmukaannya.
6. Nyalakan robot pemetaan
dengan menekan sakelar ke
kondisi ON, robot akan
bergerak secara otomatis,
pergerakan dan jejaknya dari
robot pemetaan akan terlihat
pada layar komputer.
7. Untuk mengendalikan robot
pemetaan secara manual bisa
dilakukan dengan cara
mengklik tombol yang berada
dila yar komputer atau dengan
cara menekan tombol pada
keyboard. Tombol yang dapat
digunakan untuk
mengendalikan robot ialah
tombol huruf W untuk maju, A
untuk belok ke arah kiri, D
untuk belok ke arah kanan, S
untuk menghentikan robot, dan
Q untuk kembali ke kendali
otomatis.
Hasil Pengujian
Pengujian Mikrokontroller
Pengujian mikrokontroller yaitu
dengan memberikan logika 1 atau 0
pada port mikrokontroller yang dipakai
sebagai masukkan bagi mikrokontroller.
IC mikrokontroller terlebih dahulu di
masukkan program yang telah dibuat
sebelum pengujian. Alat yang dibuat
menggunakan 2 buah mikrokontroller
yaitu untuk robot pemetaan dan untuk
pemancar/penerima.
Mikrokontroller Robot Pemetaan
Pada mikrokontroller robot
pemetaan, port 0 digunakan
sebagai masukkan dan port 1
sebagai keluaran. Pada gambar 19
dan gambar 20 adalah program
yang dimasuukan ke dalam
mikrokontroller robot pemetaan
dan hasil pengujian dapat dilihat
pada tabel 3.
Gambar 19. Program Robot Pemetaan
Bagian 1
Gambar 20. Program Robot Pemetaan
Bagian 2
Tabel 3.
Hasil Pengujian Mikrokontroller Robot
Pemetaan
Dari tabel 3 dapat dilihat bahwa nilai
keluaran pada port 1 sudah sesuai
dengan program yang di masukkan ke
dalam mikrokontroller robot pemetaan.
Hasl ini mengindikasikan bahwa
mikrokontroller bekerja dengan baik.
a. Mikrokontroller
Pemancar/penerima
Pada pemancar/penerima, port 2
menjadi masukkan dan port 1
digunakan sebagai keluaran.
Program yang di masukkan ke
dalam mikrokontroller
pemancar/penerima dapat dilihat
pada gambar 21. Hasil
pengamatan untuk
mikrokontroller
pemancar/penerima dapat dilihat
pada tabel 3.
Gambar 21. Program Mikrokontroller
Pemancar/Penerima
Tabel 3.
Hasil Pengujian Mikrokontroller
Pemancar/Penerima
Dari tabel 3 dapat dilihat bahwa data
ASCII yang diterima maupun yang
dikirimkan sesuai dengan program yang
telah di masukkan ke dalam
mikrokontroller pemancar/penerima.
Hal tersebut menunjukkan bahwa
mikrokontroller bekerja dengan baik.
Pengujian Comparator
Pengujian comparator dilakukan
dengan cara mengukur tegangan
keluaran yang dihasilkan oleh
comparator ketika sensor memberikan
perubahan tegangan.
Pin non inverting comparator
terhubung dengan sensor dan pin
inverting comparator terhubung dengan
trimpot. Untuk membentuk logika 1
pada comparator, nilai tegangan pada
pin non inverting harus lebih besar dari
nilai tegangan pada pin inverting.
Sebaliknya, jika ingin membentuk
logika 0 pada comparator, nilai
tegangan pada pin non inverting harus
lebih kecil dari nilai tegangan pada pin
inverting comparator.
Karena nilai tegangan pada yang
dihasilkan oleh sensor rata-rata adalah
0,167 Volt dan 1,033 Volt, maka agar
comparator dapat membentuk logika 1
dan 0, nilai pada pin non inverting

MHzS
f
Tf
45,45022,0
1
1
1
2
1
MHzS
f
Tf
2504,0
1
1
2
2
2
diatur sedemikian rupa agar berada di
tengah-tengah nilai tegangan rata-rata
sensor. Pada alat ini, nilai tegangan
pada pin non inverting ialah 0,5 Volt.
Hasil pengukuran tegangan
menggunakan voltmeter dapat dilihat
pada tabel 4.
Tabel 4.
Nilai Tegangan Dari Comparator
Sensor
Nilai
Tegangan
(Sensor)
Nilai Tegangan
Output
(Comparator)
Depan 1 Volt 4,5 Volt
0,2 Volt 0 Volt
Kanan 1,2 Volt 4,2 Volt
0 Volt 0 Volt
Kiri
0,9 Volt 4,2 Volt
0,3 Volt 0 Volt
Dari tabel 4 dapat dilihat, bahwa
perbedaan nilai tegangan keluaran
comparator dengan perhitungan secara
perhitungan langsung, namun nilai yang
dihasilkan comparator sudah dapat
membentuk logika yang diharapkan,
yaitu logika 1 atau logika 0.
Pengujian Jaringan Nirkabel
Pengujian jaringan nirkabel
dilakukan dengan melakukan
pengamatan pada oscilloscope frekuensi
yang dipancarkan oleh modul frekuensi.
Pengujian dilakukan dengan
memberikan 4 bit biner pada modul
tersebut dengan 2 data yang berbeda.
a. Pengujian Frekuensi 49 MHz
Pengujian dilakukan dengan
memberikan 2 data berbeda
pada modul frekuensi 49
MHz data tersebut yaitu
0001b dan 0010b,. Time/div
yang digunakan adalah 0,05
µs dan volt/div nya 2 V.
Gambar 22. Frekuensi Yang Dihasilkan
Untuk Data 0001b
Gambar 23. Penggambaran Data Biner
0001b Dengan Frekuensi Yang
Dihasilka.
Gambar 24. Frekuensi Yang Dihasilkan
Untuk Data 0010b
Gambar 25. Penggambaran Data Biner
0010b Dengan Frekuensi Yang
Dihasilkan
Dari hasil pengujian didapat periode
gelombang rapat (T1) adalah sekitar
0,022 µs dan periode gelombang
renggang (T2) adalah 0,04 µs seingga
frekuensi yang dihasilkan adalah :
Untuk gelombang rapat
Untuk gelombang renggang
b. Pengujian Frekuensi 27 MHz
Pengujian dilakukan seperti
pada pengujian frekuensi 49
MHz yaitu dengan
memberikan 2 data berbeda
pada modul frekuensi 27
MHz data tersebut yaitu
0001b dan 0010b. Time/div
yang digunakan adalah 0,05
µs dan volt/div nya 2 V.
MHzS
f
Tf
57,28035,0
1
1
1
1
Gambar 25. Frekuensi Yang Dihasilkan
Untuk Data 0001b
Gambar 26. Penggambaran Data Biner
0001b Dengan Frekuensi Yang
Dihasilkan
Gambar 27. Frekuensi Yang Dihasilkan
Untuk Data 0010b
Gambar 28. Penggambaran Data Biner
0010b Dengan Frekuensi Yang
Dihasilkan
Dari hasil pengujian didapat periode
gelombang rapat (T1) adalah sekitar
0,035 µs dan periode gelombang
renggang (T2) adalah 0,08 µs. Sehingga,
frekuensi yang dihasilkan adalah :
Untuk gelombang rapat
MHzS
f
Tf
5,1208,0
1
1
2
2
Untuk gelombang renggang
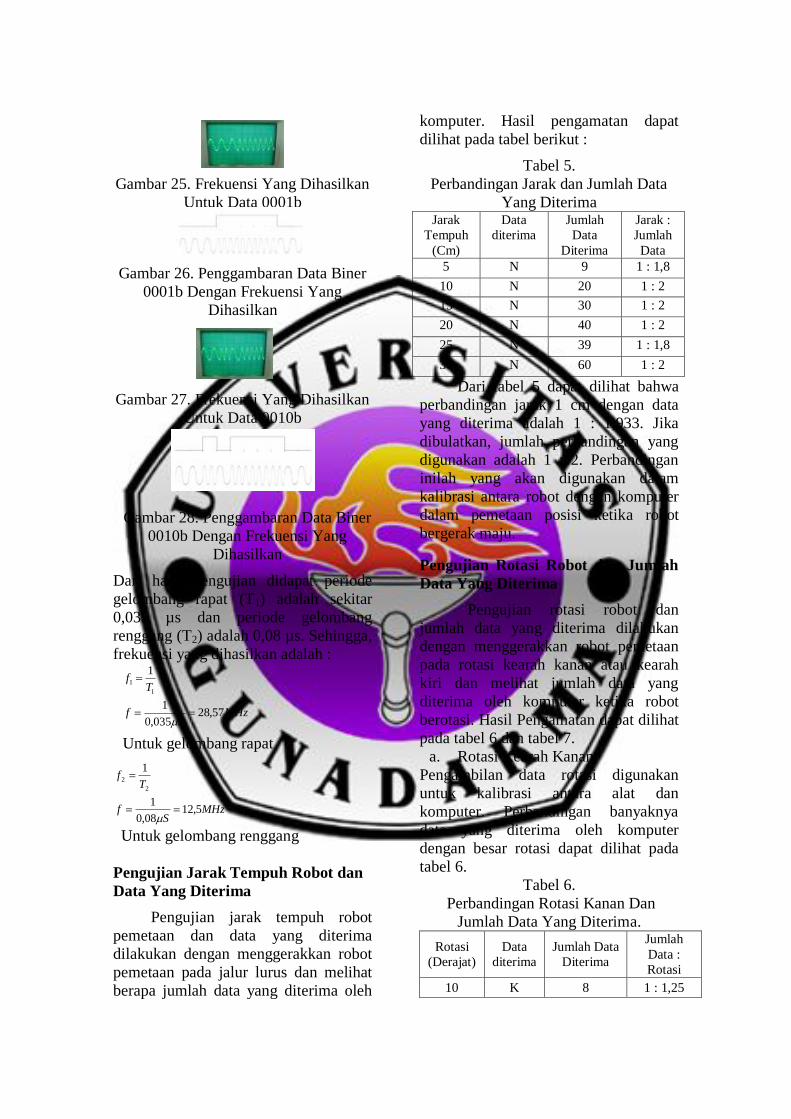
Pengujian Jarak Tempuh Robot dan
Data Yang Diterima
Pengujian jarak tempuh robot
pemetaan dan data yang diterima
dilakukan dengan menggerakkan robot
pemetaan pada jalur lurus dan melihat
berapa jumlah data yang diterima oleh
komputer. Hasil pengamatan dapat
dilihat pada tabel berikut :
Tabel 5.
Perbandingan Jarak dan Jumlah Data
Yang Diterima Jarak
Tempuh
(Cm)
Data
diterima
Jumlah
Data
Diterima
Jarak :
Jumlah
Data
5 N 9 1 : 1,8
10 N 20 1 : 2
15 N 30 1 : 2
20 N 40 1 : 2
25 N 39 1 : 1,8
30 N 60 1 : 2
Dari tabel 5 dapat dilihat bahwa
perbandingan jarak 1 cm dengan data
yang diterima adalah 1 : 1,933. Jika
dibulatkan, jumlah perbandingan yang
digunakan adalah 1 : 2. Perbandingan
inilah yang akan digunakan dalam
kalibrasi antara robot dengan komputer
dalam pemetaan posisi ketika robot
bergerak maju.
Pengujian Rotasi Robot dan Jumlah
Data Yang Diterima
Pengujian rotasi robot dan
jumlah data yang diterima dilakukan
dengan menggerakkan robot pemetaan
pada rotasi kearah kanan atau kearah
kiri dan melihat jumlah data yang
diterima oleh komputer ketika robot
berotasi. Hasil Pengamatan dapat dilihat
pada tabel 6 dan tabel 7.
a. Rotasi Kearah Kanan
Pengambilan data rotasi digunakan
untuk kalibrasi antara alat dan
komputer. Perbandingan banyaknya
data yang diterima oleh komputer
dengan besar rotasi dapat dilihat pada
tabel 6.
Tabel 6.
Perbandingan Rotasi Kanan Dan
Jumlah Data Yang Diterima.
Rotasi
(Derajat)
Data
diterima
Jumlah Data
Diterima
Jumlah
Data :
Rotasi
10 K 8 1 : 1,25

20 K 15 1 : 1,33
30 K 24 1 : 1,25
40 K 32 1 : 1,25
50 K 39 1 : 1,33
60 K 48 1 : 1,25
70 K 56 1 : 1,25
Sumber : Ardhian (2010)
Ketika robot pemetaan berotasi sejauh
10 derajat, data yang diterima pada port
komunikasi komputer berupa huruf „K‟,
jumlah data yang diterima sebanyak 8
huruf „K‟. Ketika robot pemetaan
berotasi sejauh 20 derajat, data yang
diterima masih sama karena berotasi ke
arah kanan. Namun jumlah data yang
diterima sebanyak 15 data. Dari tabel 6
dapat dilihat bahwa perbandingan rotasi
10 derajat dengan data yang diterima
adalah 1 : 1,27 dan perbandingan rotasi
20 derajat dengan data yang diterima
adalah 1 : 1,33.
Jika diperhatikan lebih detail,
perbandingan yang sering muncul
adalah 1 : 1,25. Perbandingan inilah
yang dipakai dalam kalibrasi antara
robot dengan komputer dalam pemetaan
posisi ketika robot pemetaan berotasi ke
arah kanan.
Jumlah data yang diterima dapat
diketahui melalui pengujian alat, yaitu
dengan cara meghubungkan
pengirim/penerima dan merotasi robot
pemetaan. Maka data yang diterima
dapat terlihat dengan cara
memperhatikan jumlah data yang
diterima pada port komunikasi pada
komputer.
b. Rotasi Kearah Kiri
Pengambilan data rotasi
digunakan untuk kalibrasi antara
alat dan komputer. Perbandingan
banyaknya data yang diterima
oleh komputer dengan besar rotasi
dapat dilihat pada tabel 7.
Tabel 7.
Perbandingan Rotasi Kiri dan Jumlah
Data Yang Diterima.
Rotasi
(Derajat)
Data
diterima
Jumlah
Data
Diterima
Jumlah
Data :
Rotasi
10 M 8 1 : 1,25
20 M 16 1 : 1,25
30 M 25 1 : 1,33
40 M 32 1 : 1,25
50 M 39 1 : 1,33
60 M 48 1 : 1,25
70 M 56 1 : 1,25
Sumber : ardhian (2010)
Ketika robot pemetaan berotasi ke
arah kiri, data yang diterima pada
port komunikasi komputer adalah
berupa huruf „M‟. Pada saat robot
pemetaan berotasi ke arah kiri
sejauh 10 derajat, jumlah data
yang diterima adalah sebanyak 8
data. Ketika robot pemetaan
berotasi sejauh 20 deajat, jumlah
data yang diterima adalah
sebanyak 16 data. Perbandingan
inilah yang digunakan dalam
kalibrasi antara robot pemetaan
dengan komputer dalam pemetaan
posisi ketika robot pemetaan
berotasi kearah kiri.
Pengujian Sensor
Pengujian sensor dilakukan
dengan mengukur nilai tegangan yang
dihasilkan oleh sensor jika sensor
tersebut terkena warna. Pada
pengukuran tegangan ini yang
digunakan adalah warna hitam dan
putih karena jalur yang dipakai
berwarna hitam dengan alas lantai putih.
Pengukuran dilakukan seperti pada
gambar 46.
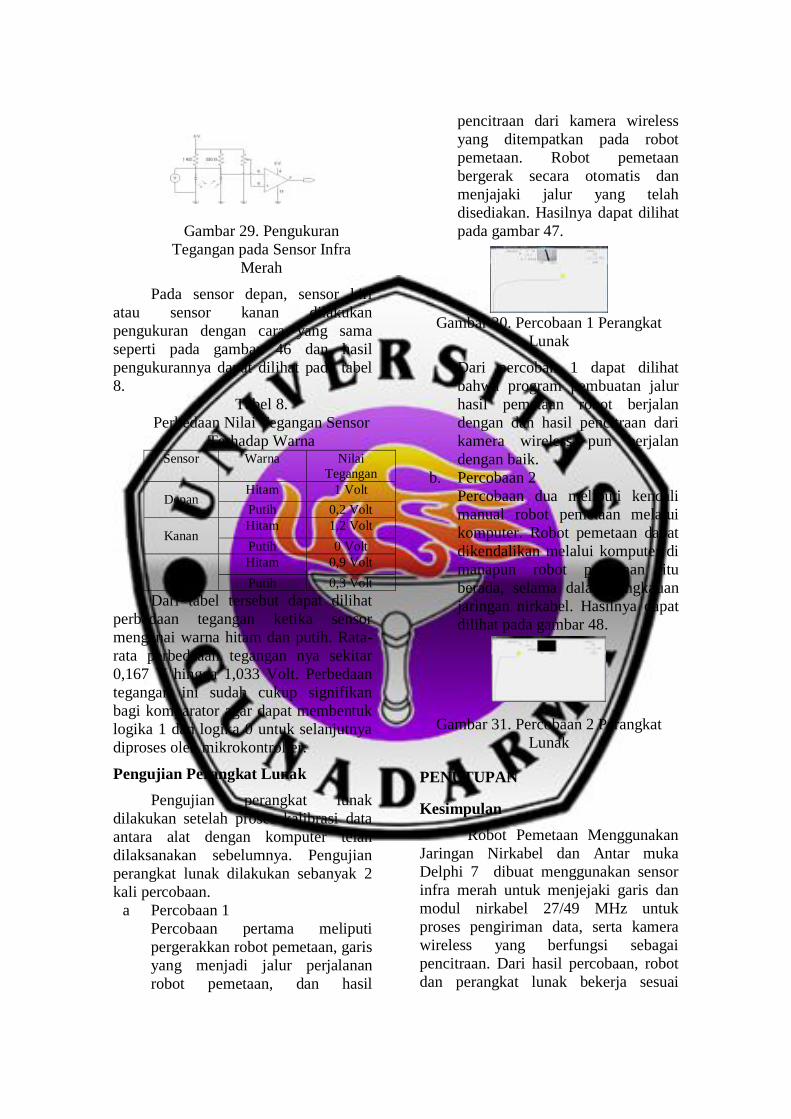
Gambar 29. Pengukuran
Tegangan pada Sensor Infra
Merah
Pada sensor depan, sensor kiri
atau sensor kanan dilakukan
pengukuran dengan cara yang sama
seperti pada gambar 46 dan hasil
pengukurannya dapat dilihat pada tabel
8.
Tabel 8.
Perbedaan Nilai Tegangan Sensor
Terhadap Warna Sensor Warna Nilai
Tegangan
Depan Hitam 1 Volt
Putih 0,2 Volt
Kanan Hitam 1,2 Volt
Putih 0 Volt
Kiri Hitam 0,9 Volt
Putih 0,3 Volt
Dari tabel tersebut dapat dilihat
perbedaan tegangan ketika sensor
mengenai warna hitam dan putih. Rata-
rata perbedaaan tegangan nya sekitar
0,167 V hingga 1,033 Volt. Perbedaan
tegangan ini sudah cukup signifikan
bagi komparator agar dapat membentuk
logika 1 dan logika 0 untuk selanjutnya
diproses oleh mikrokontroller.
Pengujian Perangkat Lunak
Pengujian perangkat lunak
dilakukan setelah proses kalibrasi data
antara alat dengan komputer telah
dilaksanakan sebelumnya. Pengujian
perangkat lunak dilakukan sebanyak 2
kali percobaan.
a Percobaan 1
Percobaan pertama meliputi
pergerakkan robot pemetaan, garis
yang menjadi jalur perjalanan
robot pemetaan, dan hasil
pencitraan dari kamera wireless
yang ditempatkan pada robot
pemetaan. Robot pemetaan
bergerak secara otomatis dan
menjajaki jalur yang telah
disediakan. Hasilnya dapat dilihat
pada gambar 47.
Gambar 30. Percobaan 1 Perangkat
Lunak
Dari percoban 1 dapat dilihat
bahwa program pembuatan jalur
hasil pemetaan robot berjalan
dengan dan hasil pencitraan dari
kamera wireless pun berjalan
dengan baik.
b. Percobaan 2
Percobaan dua meliputi kendali
manual robot pemetaan melalui
komputer. Robot pemetaan dapat
dikendalikan melalui komputer di
manapun robot pemetaan itu
berada, selama dalam jangkauan
jaringan nirkabel. Hasilnya dapat
dilihat pada gambar 48.
Gambar 31. Percobaan 2 Perangkat
Lunak
PENUTUPAN
Kesimpulan
Robot Pemetaan Menggunakan
Jaringan Nirkabel dan Antar muka
Delphi 7 dibuat menggunakan sensor
infra merah untuk menjejaki garis dan
modul nirkabel 27/49 MHz untuk
proses pengiriman data, serta kamera
wireless yang berfungsi sebagai
pencitraan. Dari hasil percobaan, robot
dan perangkat lunak bekerja sesuai

dengan yang diharapkan, yaitu dapat
memetakan hasil perjalanan robot.
Rasio perbandingan pergerakan
robot ketika maju dengan data yang
diterima adalah 1:2 atau setiap
pergerakan robot sejauh 1 cm, data yang
diterima sebanyak 2 data. Rasio
perbandingan data yang diterima
dengan rotasi kanan dan rotasi kiri robot
pemetaan tidak jauh berbeda yaitu 1 :
1,25 atau setiap 1 data yang diterima
mewakili 1,25 derajat rotasi robot
pemetaan.
Pada modul nirkabel, teknik
modulasi yang digunakan adalah
Frequency Shift Keying (FSK). Data
yang dikirim berupa bit-bit biner
dengan bit 1 direpresentasikan dengan
rapat gelombang dan bit 0
direpresentasikan dengan renggang
gelombang. Pada modul frekuensi 27
MHz, frekuensi rapat gelombang (f1)
adalah 28,57 MHz dan frekuensi
renggang gelombang (f2)adalah 12,5
MHz. Pada modul frekuensi 49 MHz,
frekuensi rapat gelombang (f1) adalah
45,45 MHz dan frekuensi renggang
gelombang (f2) adalah 25 MHz.
Saran
Penempatan sensor dioda infra
merah dan photodioda harap
ditempatkan setepat mungkin dengan
garis yang akan dijejaki, terutama untuk
sensor yang berada disamping kanan
dan samping kiri agar tidak terkena jalur
berwarna hitam. Pada perancangan
software, gunakan algoritma seefisien
mungkin untuk mengurangi beban kerja
komputer. Pastikan juga kalibrasi yang
tepat antara pergerakan pada peta dan
pergerakan sebenarnya dengan
melakukan pengambilan data terlebih
dahulu sebelum program dirampungkan.
Gunakan skala yang tepat agar
tidak menyulitkan dalam proses
pembuatan jalur pada layar monitor dan
sesuai dengan jalur yang telah dilalui
oleh robot pemetaan.
DAFTAR PUSTAKA
[1] Anonim, Modul Panduan
Elektronika Dasar, Laboratorium
Elektronika Dasar dan Komputer
Universitas Gunadarma, Depok,
2008.
[2] Anonim, Modul Panduan
Mikroprosesor, Laboratorium
Elektronika dan Komputer
Universitas Gunadarma, Depok,
2009.
[3] Deny Prihady & Dedy Rusmady,
Belajar Rangkian Elektronika
Tanpa Guru, Del Fajar Utama,
Jakarta, 2007.
[4] Mustafa Ardhian, Robot Penjejak
garis Dengan Pemetaan Posisi
Menggunakan Jaringan Nirkabel
dan Antarmuka Delphi 7,
Universitas Gunadarma, Depok,
2010.
[5] URL:
http://backt.blogspot.com/2008/05
/modulasi-digital.html, Mei 2008.
[6] URL:
http://id.wikipedia.org/wiki/ASCI
I, 27 Juli 2010.
[7] URL:
http://id.wikipedia.org/wiki/Modu
lasi, 24 Agustus 2011.