dasar sistem kontrol_2.docx
TRANSCRIPT
Dasar Sistem Kontrol
NASA flight simulator robot arm with electromechanical control system components
The space shuttle consists of multiple subsystemsTerminologi pada Sistem Kontrol
Sistem Sebuah susunan komponen – komponen fisik yang
saling terhubung dan membentuk satu kesatuan untuk melakukan aksi tertentu
Contoh : tubuh, pemerintahan, motor Kontrol mengatur, mengarahkan, memerintahkan Input (Set Point, Reference) Respon sistem yang diinginkan Output Respon sistem sebenarnya Plant Obyek yang dikontrol Contoh Sistem Kontrol - Elevator
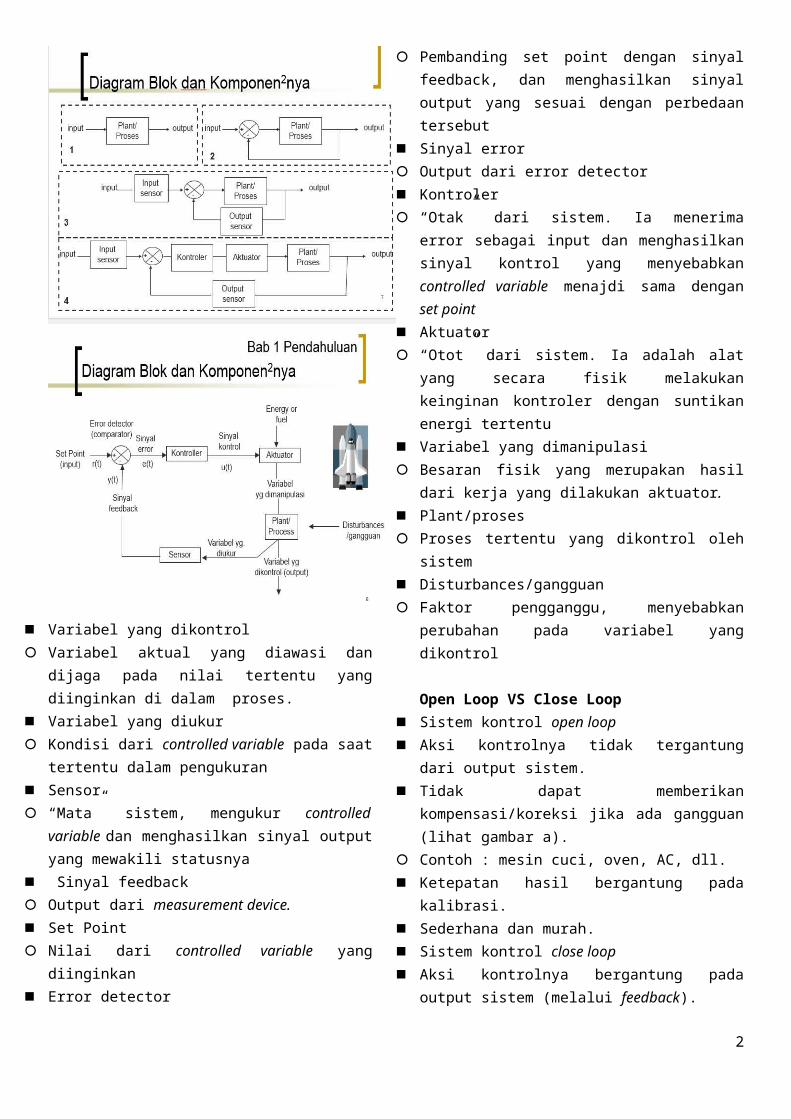
a. Early elevators were controlled by hand ropes or an elevator operator. Here, a rope is cut to demonstrate the safety brake, an innovation in earlyelevators;b. Modern Duo-lift elevators make their way up the Grande Arche in Paris, driven by one motor, with each car counterbalancing the other. Today, elevators are
fully automatic, using control systems to regulate position and velocity.
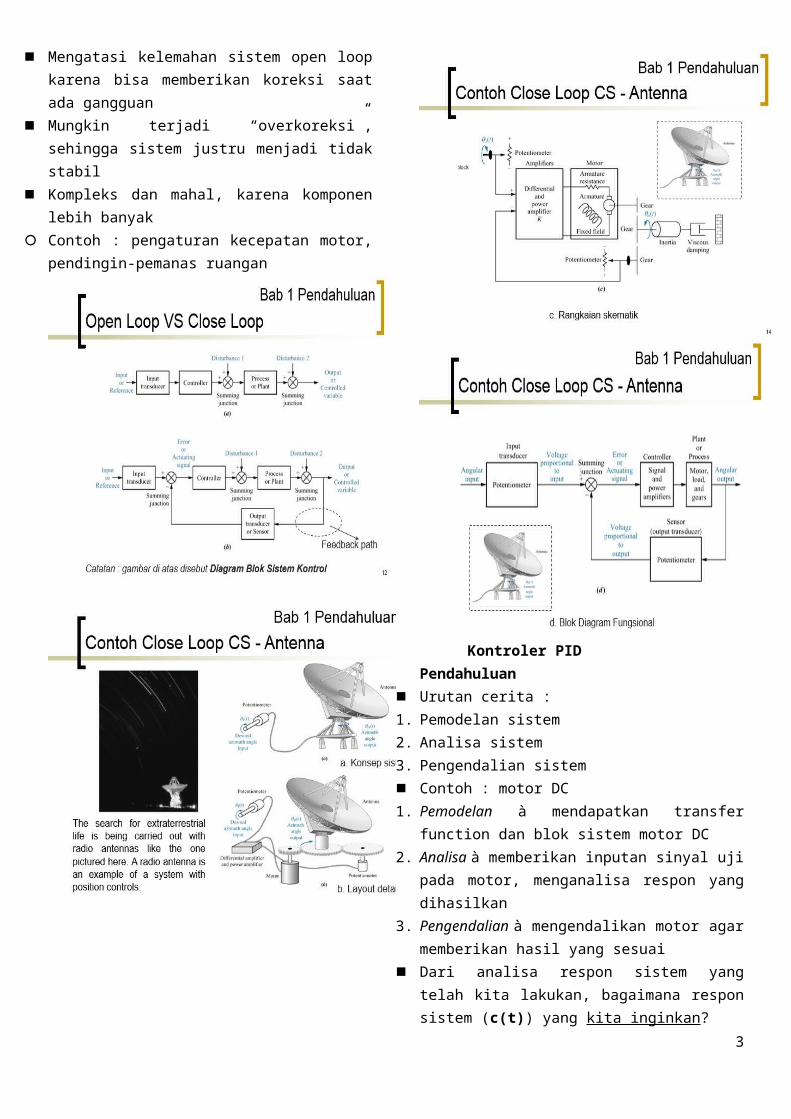
Contoh Sistem Kontrol - Elevator
Input : lantai 4 Output (elevator response) : lantai – lantai yang
dilewati elevator Transient response Steady state response steady state error
1
Variabel yang dikontrol Variabel aktual yang diawasi dan dijaga pada nilai
tertentu yang diinginkan di dalam proses. Variabel yang diukur Kondisi dari controlled variable pada saat tertentu
dalam pengukuran Sensor “Mata” sistem, mengukur controlled variable dan
menghasilkan sinyal output yang mewakili statusnya Sinyal feedback Output dari measurement device. Set Point Nilai dari controlled variable yang diinginkan Error detector Pembanding set point dengan sinyal feedback, dan
menghasilkan sinyal output yang sesuai dengan perbedaan tersebut
Sinyal error Output dari error detector Kontroler “Otak” dari sistem. Ia menerima error sebagai input
dan menghasilkan sinyal kontrol yang menyebabkan controlled variable menajdi sama dengan set point
Aktuator “Otot” dari sistem. Ia adalah alat yang secara fisik
melakukan keinginan kontroler dengan suntikan energi tertentu
Variabel yang dimanipulasi Besaran fisik yang merupakan hasil dari kerja yang
dilakukan aktuator. Plant/proses Proses tertentu yang dikontrol oleh sistem Disturbances/gangguan Faktor pengganggu, menyebabkan perubahan pada
variabel yang dikontrol
Open Loop VS Close Loop Sistem kontrol open loop Aksi kontrolnya tidak tergantung dari output sistem. Tidak dapat memberikan kompensasi/koreksi jika ada
gangguan (lihat gambar a). Contoh : mesin cuci, oven, AC, dll. Ketepatan hasil bergantung pada kalibrasi. Sederhana dan murah. Sistem kontrol close loop Aksi kontrolnya bergantung pada output sistem
(melalui feedback). Mengatasi kelemahan sistem open loop karena bisa
memberikan koreksi saat ada gangguan Mungkin terjadi “overkoreksi”, sehingga sistem justru
menjadi tidak stabil Kompleks dan mahal, karena komponen lebih banyak Contoh : pengaturan kecepatan motor, pendingin-
pemanas ruangan
2
Kontroler PIDPendahuluan
Urutan cerita :1. Pemodelan sistem2. Analisa sistem3. Pengendalian sistem Contoh : motor DC1. Pemodelan à mendapatkan transfer function dan blok
sistem motor DC2. Analisa à memberikan inputan sinyal uji pada motor,
menganalisa respon yang dihasilkan3. Pengendalian à mengendalikan motor agar
memberikan hasil yang sesuai Dari analisa respon sistem yang telah kita lakukan,
bagaimana respon sistem (c(t)) yang kita inginkan?1. Sesuai dengan input/r(t) (misal : unit step) Jika tidak sesuai?1. Salah satu caranya dengan menambahkan kontroler Fungsi kontroler :
1. Mengendalikan sistem dengan memanipulasi sinyal error, sehingga respon sistem (output) sama dengan yang kita inginkan (input)
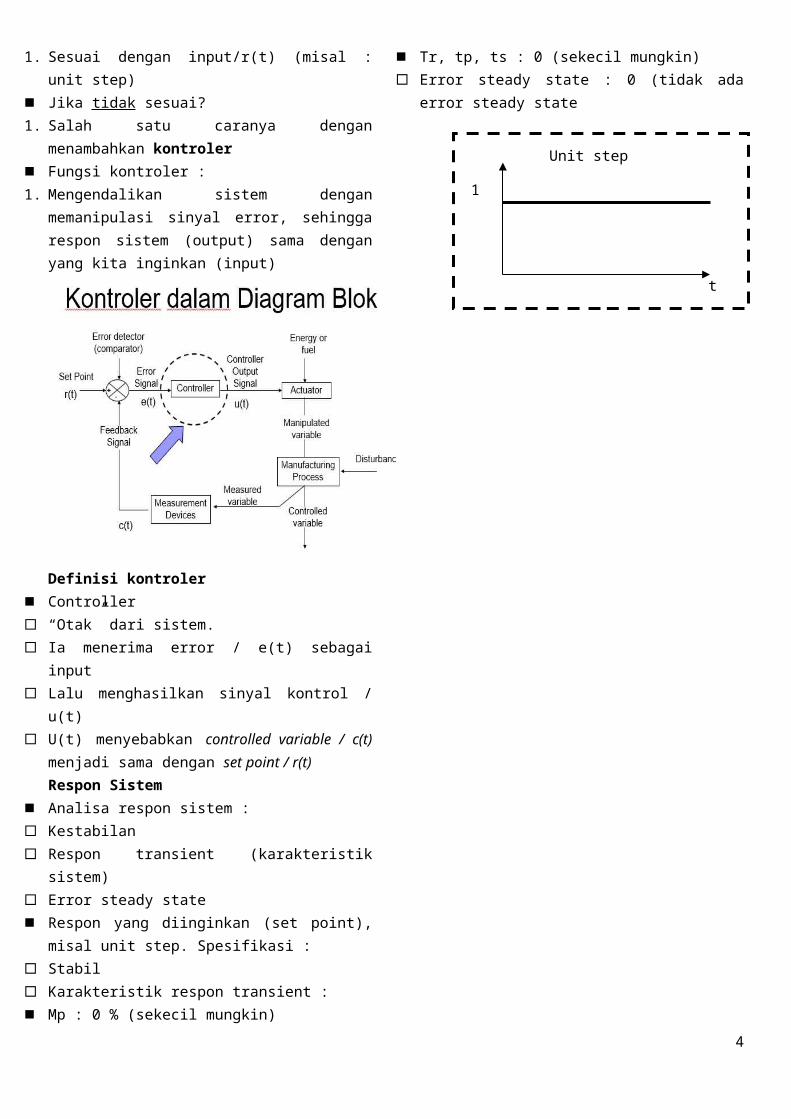
Definisi kontroler Controller “Otak” dari sistem. Ia menerima error / e(t) sebagai input Lalu menghasilkan sinyal kontrol / u(t) U(t) menyebabkan controlled variable / c(t) menjadi
sama dengan set point / r(t)Respon Sistem
Analisa respon sistem : Kestabilan Respon transient (karakteristik sistem) Error steady state Respon yang diinginkan (set point), misal unit step.
Spesifikasi : Stabil Karakteristik respon transient : Mp : 0 % (sekecil mungkin) Tr, tp, ts : 0 (sekecil mungkin) Error steady state : 0 (tidak ada error steady state
3
Unit step
t
1
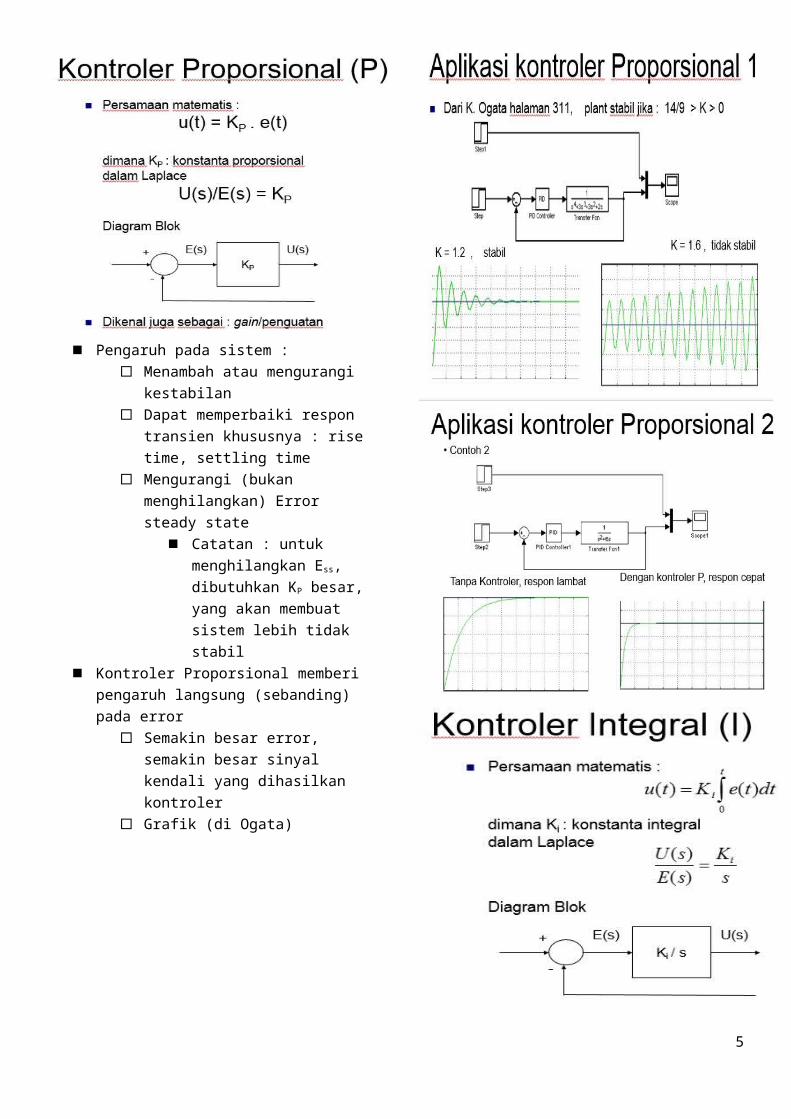
Pengaruh pada sistem : Menambah atau mengurangi
kestabilan Dapat memperbaiki respon transien
khususnya : rise time, settling time Mengurangi (bukan menghilangkan)
Error steady state Catatan : untuk
menghilangkan Ess, dibutuhkan KP besar, yang akan membuat sistem lebih tidak stabil
Kontroler Proporsional memberi pengaruh langsung (sebanding) pada error
Semakin besar error, semakin besar sinyal kendali yang dihasilkan kontroler
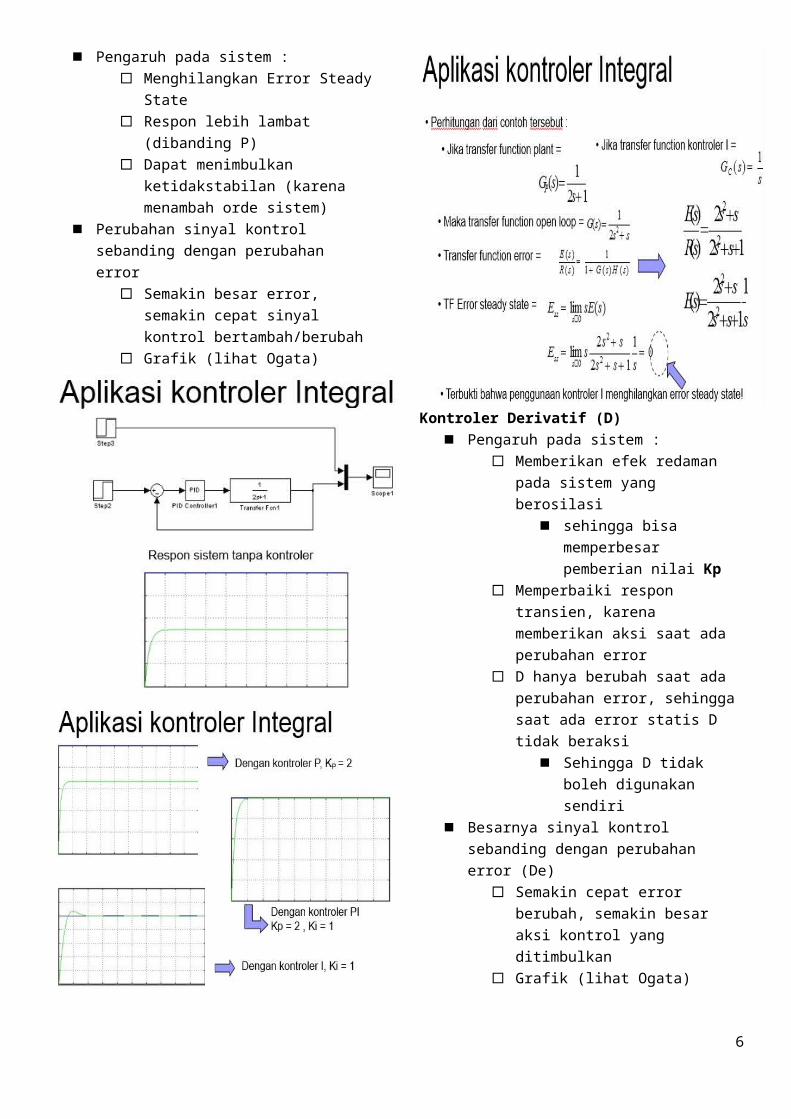
Grafik (di Ogata) Pengaruh pada sistem :
Menghilangkan Error Steady State Respon lebih lambat (dibanding P) Dapat menimbulkan ketidakstabilan
(karena menambah orde sistem) Perubahan sinyal kontrol sebanding dengan
perubahan error Semakin besar error, semakin cepat
sinyal kontrol bertambah/berubah Grafik (lihat Ogata)
4
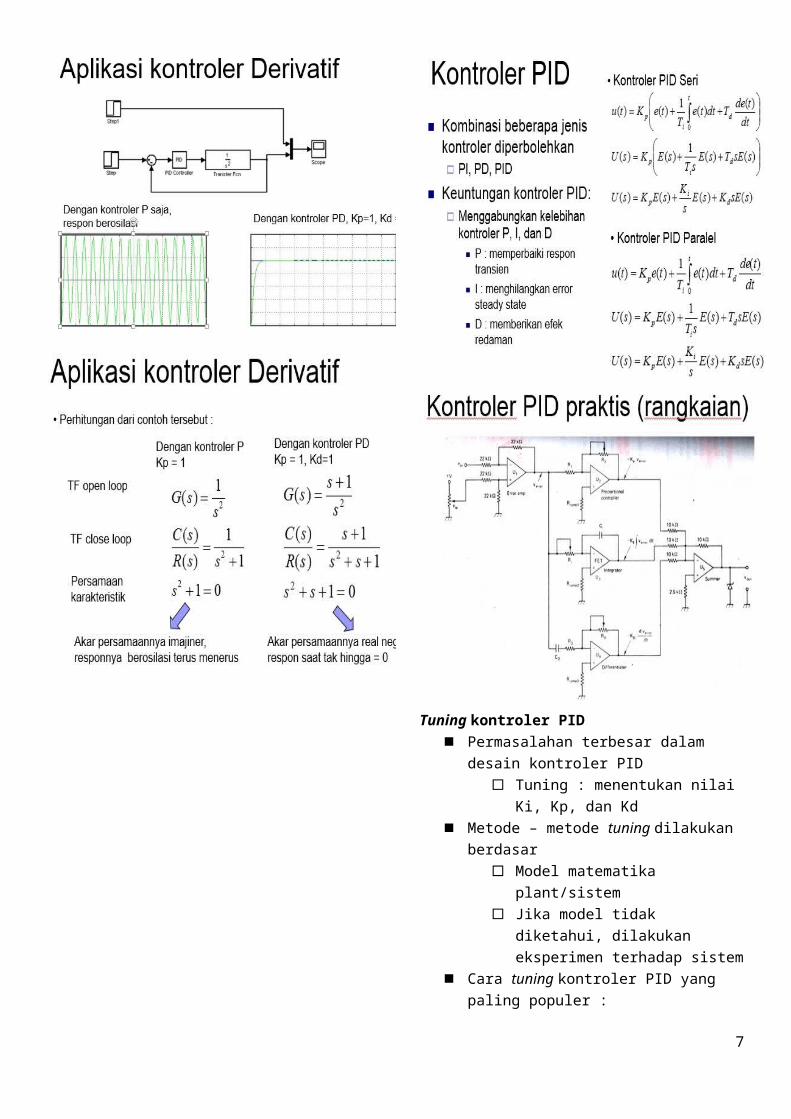
Kontroler Derivatif (D) Pengaruh pada sistem :
Memberikan efek redaman pada sistem yang berosilasi
sehingga bisa memperbesar pemberian nilai Kp
Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error
D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi
Sehingga D tidak boleh digunakan sendiri
Besarnya sinyal kontrol sebanding dengan perubahan error (De)
Semakin cepat error berubah, semakin besar aksi kontrol yang ditimbulkan
Grafik (lihat Ogata)
5
Tuning kontroler PID Permasalahan terbesar dalam desain kontroler
PID Tuning : menentukan nilai Ki, Kp, dan
Kd Metode – metode tuning dilakukan berdasar
Model matematika plant/sistem Jika model tidak diketahui, dilakukan
eksperimen terhadap sistem Cara tuning kontroler PID yang paling populer
: Ziegler-Nichols metode 1 dan 2 Metode tuning Ziegler-Nichols
dilakukan dengan eksperimen (asumsi model belum diketahui)
Metode ini bertujuan untuk pencapaian maximum overshoot (MO) : 25 % terhadap masukan step
Metode tuning Ziegler-Nichols 1 Dilakukan berdasar eksperimen, dengan
memberikan input step pada sistem, dan mengamati hasilnya
Sistem harus mempunyai step response (respons terhadap step) berbentuk kurva S
Sistem tidak mempunyai integrator (1/s)
Sistem tidak mempunyai pasangan pole kompleks dominan (misal : j dan –j, 2j dan -2j)
Muncul dari persamaan karakteristik à s2+1, s2+4
Respon sistem berosilasi
Prosedur praktis1. Berikan input step pada sistem2. Dapatkan kurva respons berbentuk S3. Tentukan nilai L dan T4. Masukkan ke tabel berikut untuk
mendapatkan nilai Kp, Ti, dan Td
Metode tuning Ziegler-Nichols 2 Metode ini berguna untuk sistem yang
mungkin mempunyai step response berosilasi terus menerus dengan teratur
Sistem dengan integrator (1/s) Metode dilakukan dengan eksperimen
Dengan meberikan kontroler P pada suatu sistem close loop dengan plant terpasang
6
Gambar … Lalu nilai Kp ditambahkan sampai sistem
berosilasi terus menerus dengan teratur Nilai Kp saat itu disebut penguatan
kritis (Kcr) Periode saat itu disebut periode kritis
(Pcr)
7