bab ii tinjauan pustaka 2.1 2 - eprints.umm.ac.id
TRANSCRIPT

5
BAB II
TINJAUAN PUSTAKA
2.1 Image Processing
Pengolahan citra atau bisa disebut digital image processing merupakan ilmu
tentang pembelajaran teknik-teknik pengolahan citra atau gambar[7], sebuah citra
terkadang memiliki penurunan informasi seperti derau, kontras yang kurang sesuai,
kurang tajam, kabur dan sebagainya. Sehingga diperlukan adanya manipulasi
gambar agar kualitasnya lebih baik.
2.2 Capture Image
Capture image adalah cara pengambilan gambar menggunakan kamera.
Dengan cara mensetting panjang dan lebar frame, nilai kecerahan pengambilan
gambar dan nilai FPS (frame per second) pada kamera yang akan diambil secara
real time, karena fungsi pensettingan awal pada pengambilan gambar merupakan
fator utama dalam pentuan paramater pada sebuah citra.
2.3 BGR to RGB
Mengkonversi gambar dari satu ruang warna ke ruang warna lainnya, dalam
kasus tranformasi dari ruang warna RGB (Red, Green, Blue), urutan saluran harus
ditentukan secara eksplisit (RGB atau BGR), namun pada defaul opencv urutannya
bukanlah RGB tetapi di balik menjadi BGR. Jadi byte pertama dalam gambar
berwarna akan menjadi komponen Biru 8-bit ,byte yang kedua manjadi hijau, dan
byte yang ketiga menjadi merah. untuk range pada masing- masing warna tersebut
yaitu dari 0 sampai dengan 255.
2.4 Perspective Transformation
Teknik transformation eye view bird adalah metode yang menghasilkan
citra atau gambar perspektif tampilan atas yang dapat di tunjukan gambar 2.1
sebagai bentuk tampilan eye view bird. [8]

6
Gambar 2.1 Tampilan transformation eye view bird
Pada dasarnya transformasi pandangan mata burung dapat dibagi menjadi
tiga langkah, pertama kita harus mempresentasikan gambar dalam koordinat
bergeser sistem, selanjutnya melakukan rotasi gambar, dan kemudian proyek
gambar pada di tampilkan pada bidang dua dimensi. Dalam pemrosesannya dapat
di tujukan pada gambar 2.2.
Coordinate ShiftingRotation and
scalingProjection
Input Image Output Image
Gambar 2.2 Blok diagram transformation bird eye view
2.5 Treshold Operation
Tresholding merupakan operasi sederhana, dengan menggunakan nilai
ambang intensitas pada suatu citra.[9] Secara matematis, dapat dirumuskan sebagai
berikut.
𝑏(𝑦, 𝑥) = 𝑓 (𝑥) = {1,𝑢𝑛𝑡𝑢𝑘 (𝑦,𝑥) ≥𝑇
0,𝑢𝑛𝑡𝑢𝑘 (𝑦,𝑥) < 𝑇 ...(1)
Pada persamaan (1), T merupakan nilai tresholding pada nilai 1 atau 0, nilai
tresholding tersebut berguna untuk memfilter warna pada suatu citra namun operasi
ini terdapat sedikit kelamahan
1. Tidak memperlihatkan hubungan spasial antarpiksel
2. Sensitif terhadap pencahayaan yang tingkat luxnya berbeda
3. berlaku untuk keadaan yang ideal (misalnya, latarbelakang
hitam dan objek yang bewarna putih).
Gambar 2.3 merupakan contoh penggunaan tresholding:

7
Gambar 2.3 Tresholding
2.6 Canny Edge Detection
Metode canny digunkan untuk membantu dalam mendeteksi tepi pada
gambar dan memunculkan informasi tentang gambar. Metode Canny adalah salah
satu algoritma deteksi tepi moderen, dimana john canny mengusulkan tiga kriteria
yang menjadikan basis pengembangan filter untuk mengoptimalkan pendeteksian
tepi pada citra bernoise.[10] metode canny memiliki kriteria sebagai berikut :
1. Good detection, bertujuan memaksimalkan nilai signal to noise ratio
(SNR) sehingga semua tepi dapat terdeteksi dengan baik atau tidak ada
yang hilang.
2. Good localization, tepi yang terdeteksi berada pada posisi yang
sebenarnya atau dengan kata lain bahwa jarak antara posisi sebenarnya
adalah seminimum mungkin.
3. Only one response to a single, hanya satu respon untuk sebuah tepi dengan
kata lain detektor tidak memberikan tepi yang bukan tepi aslinya.
Pada gambar 2.4 merupakan hasil dari contoh operasi canny edge
detection.
Gambar 2.4 Canny edge detetction

8
2.7 Histogram
Histogram citra adalah grafik yang menggambarkan penyebaran nilai-nilai
intensitas piksel dari suatu citra.[11] Histogram juga dapat menunjukan banyak hal
tentang kontras dan kecerahan dari sebuah citra. Secara matematis histogram citra
memiliki persamaan sebagai berikut.
𝑝𝑟 (𝑟𝑘) =𝑛𝑘
𝑛; 0 ≤ 𝑟𝑘 ≤ 1 𝑘 = 0,1, … , 𝐿 − 1 … (2)
Dimana :
L = jumlah level
𝑝𝑟 (𝑟𝑘) = probalitas kemunculan level ke-k
𝑛𝑘 = jumlah kemunculan level k pada citra
𝑛 = total jumlah pixel dalam citra
2.8 Haar Cascade Classifer
Pada tahun 2001 Algoritma ini ditemukan oleh Paul viola dan Michael,
klasifikasi gambar dilakukan berdasarkan nilai dari sebuah fitur. Kelebihan
algoritma ini memiliki Komputasi yang cepat karena klasifikasi fitur lebih cepat
jika dibandingkan dengan pemrosesan citra perpiksel.[12] Dalam pendeteksian
sebuah objek dengan menggunakan metode haar cascade terdapat 4 hal dalam
pemrosesannya:
1. Feature haar
2. Integral image
3. Algoritma boosting
4. Cascade classifier
Gambar 2.5 merupakan jenis fitur pada haar cascade.

9
Gambar 2.5 Fitur haar cascade
Pada persamaan 3 merupakan rumus perhitungan setiap fitur, dengan cara
jumlah nilai pixel di putih di kurangi dengan jumlah nilai pixel di hitam. Dan
menghasilkan suatu nilai tunggal
(𝑓𝑥) = 𝑆𝑢𝑚𝑊ℎ𝑖𝑡𝑒 𝑟𝑒𝑐𝑡𝑎𝑛𝑔𝑙𝑒 − 𝑆𝑢𝑚𝐵𝑙𝑎𝑐𝑘𝑟𝑒𝑐𝑡𝑎𝑛𝑔𝑙𝑒 … (3)
2.8.1 Integral Image
Integral image digunakan untuk mempercepat proses ekstrak feature
dengan cara mengubah gambar masukan menjadi suatu representasi gambar
integral. Pada gambar integral berfungsi menghitung jumlah semua piksel di
dalam feature, dengan cara menggunakan empat nilai secara efisien. Empat Nilai
tersebut adalah piksel pada gambar integral yang bertepatan/berposisi pada sudut
persegi panjang.[13]
Gambar 2.6 Representasi gambar integral
Pada persamaan 4 merupakan rumus untuk menghitung jumlah piksel D.
𝐷 = 𝐿4 − 𝐿3 − 𝐿2 + 𝐿1 (4)

10
Gambar 2.7 Convert input image menjadi integral image
Pada gambar 2.7 merupakan proses perubahan image asli di rubah ke
integral image, dimana di ambil sampel, pada hasil integral image pada angka 12,
dimana hasil tersebut merupakan penjumlahan dari 5+1+2+4 = 12 dimana bisa
dilihat arah panah untuk melakukan proses penjumlahannya.
Gambar 2.8 Jumlah fitur daerah terang dan daerah gelap
Pada gambar 2.8 merupakan nilai yang akan digunakan untuk mencari nilai
fitur. 𝐿1 = 2, 𝐿2 = 13, 𝐿3 = 26, 𝐿4 = 97 pada daerah terang dan 𝐿1 = 13, 𝐿2 =
26, 𝐿3 = 97, 𝐿4 = 157 pada daerah gelap. Dimana pada total jumlah piksel pada
daerah terang sebesar 60 dan daerah gelap sebesar 47, maka dengan jumlah pixel
pada daerah terang di kurangi jumlah pixel pada daerah gelap maka di dapatkan
hasil fitur pada persegi panjang sebesar 13.
2.8.2 Algoritma Adaboost
Algoritma adabosst merupakan algoritma yang menghasilkan strong
classifier atau klasifikasi yang kuat, dengan mengkombinasi weak classifier atau
klasifikasi lemah secara linier.[7] pada algoritma Adaboost digunakan untuk
pemilihan fitur haar yang lebih spesifik dengan cara mengevaluasi setiap fitur
terhadap data latih. Pada klasifikasi adaboost terdapat dua kelas yaitu positif dan
negatif seperti pada gambar 2.9.

11
Gambar 2.9 klasifikasi adaboost
Pada data pertama original data set 𝐷1 terdapat 2 kelas yaitu positif dan
negatif, langkah pertama kita harus mencari weak calssifier, yang paling bagus
dalam artian memiliki nilai error paling kecil, dan saat proses weak classifier hanya
di batasi oleh satu garis saja, dimana satu classifier garis ini kita tidak akan mungkin
bisa mengklasifikasikan 2 kelas kita secara benar dan sempurna, sehingga kita sebut
classifier yang lemah atau bisa di sebut weak classifier. Jadi pada gambar 2.9 di
dapatkan proses 3 kali classifier dimana nanti akan di gabung manjadi satu
classifier yang strong atau kuat.
Gambar 2.10 penggabungan weak classifier
Pada gambar 2.10 merupakan gabungan antara 3 weak classifier dengan
menjumlahkan nilai bobot dengan perkalian hypothesis (kelas positif & negatif ).
Dimana jika warna merah kita anggap kelas 1 jika hasil penjumlahan antara
BOBOT
12
perkalian bobot dengan hypotesis pada masing-masing weak classifier hasilnya ≥ 0
maka area yang di jumlahkan akan masuk ke kelas merah atau positif. Dan jika
hasilnya < 0 maka akan masuk kelas negatif atau warna biru.
Kunci untuk adaboost bisa mendeteksi sebuah objek yaitu dengan,
hypotesisnya dibatasi menggunakan “single feature”. Pilih satu fitur yang paling
bagus dalam hal ini memiliki nilai error yang kecil. Dan mencari hypothesisnya
atau tresholdnya. Pada persmaan 5 merupakan rumus untuk mencari hypothesisnya
atau tresholdnya.[14]
ℎ(𝑥, 𝑓, 𝑝, Ɵ) = {1, 𝑖𝑓 𝑝𝑓 (𝑥) < 𝑝Ɵ
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒… (5)
Dimana :
x = sub-window image 24x24
f = nilai feature dari Haar-like feature
Ɵ = treshold
P = polarity
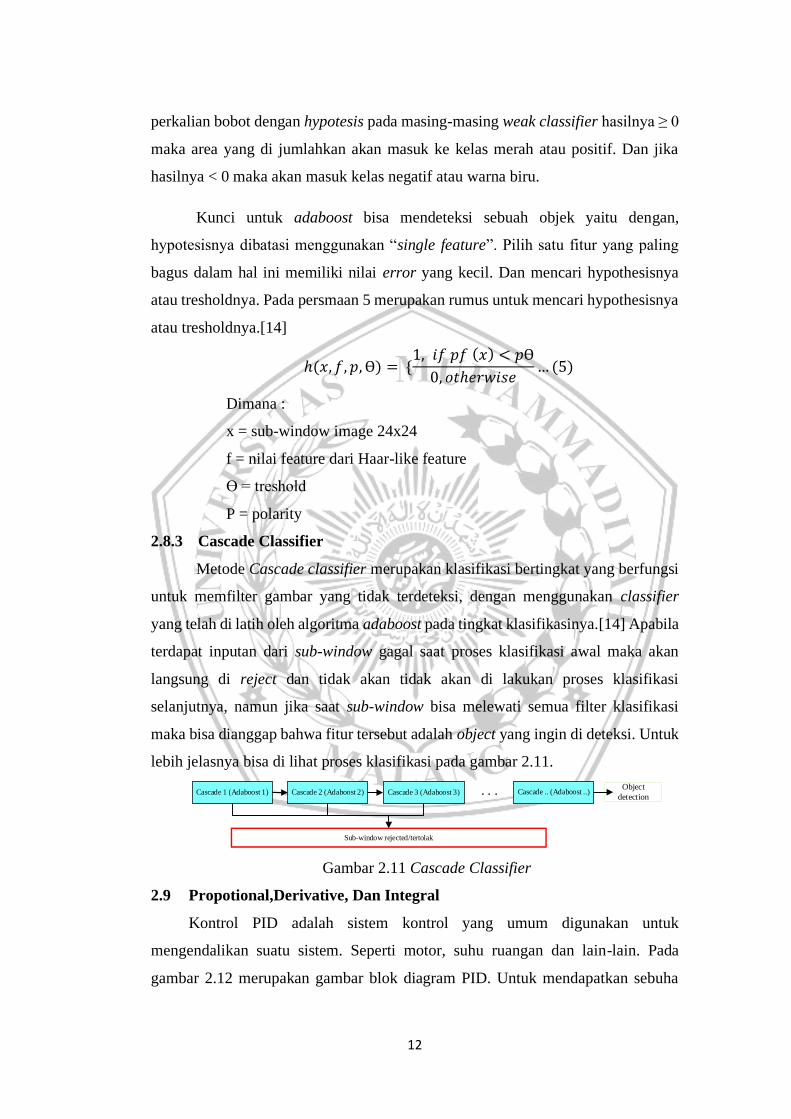
2.8.3 Cascade Classifier
Metode Cascade classifier merupakan klasifikasi bertingkat yang berfungsi
untuk memfilter gambar yang tidak terdeteksi, dengan menggunakan classifier
yang telah di latih oleh algoritma adaboost pada tingkat klasifikasinya.[14] Apabila
terdapat inputan dari sub-window gagal saat proses klasifikasi awal maka akan
langsung di reject dan tidak akan tidak akan di lakukan proses klasifikasi
selanjutnya, namun jika saat sub-window bisa melewati semua filter klasifikasi
maka bisa dianggap bahwa fitur tersebut adalah object yang ingin di deteksi. Untuk
lebih jelasnya bisa di lihat proses klasifikasi pada gambar 2.11.
Cascade 1 (Adaboost 1) Cascade 2 (Adaboost 2) Cascade 3 (Adaboost 3) Cascade .. (Adaboost ..). . . Object
detection
Sub-window rejected/tertolak
Gambar 2.11 Cascade Classifier
2.9 Propotional,Derivative, Dan Integral
Kontrol PID adalah sistem kontrol yang umum digunakan untuk
mengendalikan suatu sistem. Seperti motor, suhu ruangan dan lain-lain. Pada
gambar 2.12 merupakan gambar blok diagram PID. Untuk mendapatkan sebuha

13
respon sistem yang stabil maka dapat menggunakan ke 3 komponen PID, akan
tetapi bisa juga menggunakan komponen-komponen pada PID secara terpisah
seperti PD dan PI dengan catatan tidak menggunan hanya salah satu komponen P,I
dan D.[15]
Gambar 2.12 Desain PID
Persamaan matematis PID adalah sebagai berikut[15]:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) + 𝑘𝑖 ∫ 𝑒(𝑡)
𝑡
0
𝑑𝑡 + 𝑘𝑑
𝑑
𝑑𝑡𝑒(𝑡) … (6)
nilai keluaran u(t) merupakan hasil penjumlahan operasi dari Kp, Ki, dan
Kd dimana pada setiap sistem dipengaruhi oleh error (e) terhadap selang waktu (t).
Tabel 2.1 merupakan respon loop pada setiap komponen PID, .[16]
Tabel 2.1 Respon loop tertutup PID
Respon
loop
tertutup
Rise time Overshoot Settling time
Steady – state
error
Kp Mengurangi Meingkatkan Perubahan
Kecil
Mengurangi/
Menurunkan
Ki Mengurangi Meningkatkan Meningkatkan mengeliminasi
Kd Perubahan
kecil Mengurangi Mengurangi Perubahan kecil

14
2.9.1 Kontrol Proporsional
Kontrol proposional mempunyai output respon sistem yang sebanding
dengan besar sinyal error/kesalahan,untuk pada perubahan sinyal input
menyebabkan sistem langsung mengeluarkan sinyal outputan sebesar konstatanta
pengalinya.persamaan matematisnya yaitu[16]:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) … (7)
2.9.2 Kontrol Integral
Pengontrol integral berfungsi untuk menghilangkan steady-state error
menjadi nol, jika sebuah sistem kontrol tidak mempunyai unsur integrator , maka
sistem kontrol tersebut tidak dapat menjamin keluaran respon sistem akan tepat atau
mendekati respon sistem yang di inginkan, karena kontrol integral mempunyai
karakteristik, dimana nilai output sistem sangat di pengaruhi oleh perubahan, dari
sinyal kesalahan.[16] Jika sinyal error tidak mengalami perubahan, maka output
pada sistem akan menjaga keadaannya saat sebelum terjadinya perubahan pada
input. Dimana jika di tuliskan persamaan matematisnya sebagai berikut:
𝑢(𝑡) = 𝑘𝑖 ∫ 𝑒(𝑡)
𝑡
0
𝑑𝑡 … (8)
2.9.3 Kontrol Derivative
Pengontrol derivative memiliki karakteristik mendahului, yang artinya efek
pada sistem kontol ini dapat menghasilkan koreksi yang cepat sebelum error pada
sistem menjadi sangat besar, dan efek pada sistem ini bersifat korektif serta
meningkatkan kestabilan,[16] ciri lain dari kontrol ini adalah. tidak dapat
menghasilkan output jika tidak ada perubahan sinyal kesalahan atau error pada
input, jika sinyal error merupakan fungsi waktu maka output respon sistem yang
dihasilkan pengontrol bergantung pada nilai t dan laju perubahan sinyal error.
Dimana persamaan matematisnya adalah sebagai berikut:
𝑢(𝑡) = 𝑘𝑑
𝑑
𝑑𝑡𝑒(𝑡) … (9)

15
2.10 Kamera
Kamera adalah alat untuk pengambilan gambar secara real time, objek yang
ditangkap oleh kamera dan dapat di proses ke dapalam pengolahan citra digital
untuk mencari nilai-nilai parameter yang dibutuhkan oleh sebuah sistem. Pada
gambar 2.13 merupakan modul kamera rev 1.3, untuk mengakses kamera ini yaitu
menggunakan camera serial interface (CSI).[17]
Gambar 2.13 Kamera rev 1.3
2.11 Motor Servo
Motor servo memiliki dua araj kerja yaitu CCW (counter clock wise), dan
CW (Clock wise) untuk menggerakan rotor pada servo harus menggunakan sinyal
duty cycle. [18]
Gambar 2.14 Motor Servo
Posisi sudut servo terhadap waktu pemberian input sinyal pulsa [19]:
Gambar 2.15 Duty Cycle

16
Jika sinyal duty cycle 1 ms maka sudut servo sebesar 0○, bila motor servo
di berikan sinyal duty cycle 1,5 ms maka sudut servo sebesar 90○, namun jika duty
cycle yang diberikan sebesar 2 ms maka sudut servo menjadi 180○.
2.12 Motor Direct Current (DC)
Untuk menggerakan motor dc yaitu menggunakan sumber arus dan
tegangan Direct current atau bisa di singkat DC. Dimana arah putar pada motor ini
tergantung pada penempatan polaritas tegangan pada pin motor DC.[20]
Gambar 2.16 Motor DC
2.13 Driver motor H-Bridge
Rangkaian H-Bridge digunakan untuk mengendalikan arah putaran motor
dan kecepatan motor,[20] untuk bisa mengendalikan arah putar dan kecepatan
sebuah motor, maka harus menggunakan metode PWM (pulse width modulation)
Untuk mengatur kecepatan sebuah motor dan mengatur transistor mana yang harus
di aktif kan dalam mengendalikan arah putar motor, pada perancangan motor driver
H-bridge membutuhkan 4 buah transistor dalam mengendalikan arah putar dan
kecepatan dari sebuah motor.
Gambar 2.17 Driver motor H-Bridge