rancang bangun kursi roda hybrid dengan penggerak manual ... · yang timbul dari desain yang ada...
TRANSCRIPT

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
1
Rancang Bangun Kursi Roda Hybrid dengan Penggerak Manual dan Elektrik Menggunakan Panel Tenaga Surya , Dinamo dan Listrik AC
sebagai Sumber Pengisian Aki
Dwi Kurniawan - 2204 100 117 Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember
Kampus ITS, Surabaya – 60111 Email: [email protected]
ABSTRAK Kursi roda merupakan bagian yang sangat penting dalam kehidupan penderita cacat kaki atau lumpuh. Hampir seluruh aktifitas sehari-hari mereka bergantung pada kursi roda. Saat ini, dipasaran telah tersedia kursi roda manual dan kursi roda elektrik Tetapi harga yang relatif tinggi membuat mereka yang sebagian besar kalangan menengah ke bawah tidak mampu untuk membelinya. Dengan segala keterbatasan, mereka memodifikasi kerangka sepeda sedemikian rupa sehingga dapat digunakan menjadi alat transportasi sederhana untuk penderita kelumpuhan. Walaupun demikian, masih banyak permasalahan yang timbul dari desain yang ada antara lain, putaran rantai yang mengganggu pada saat belok kanan, kestabilan dan keseimbangan sepeda. Hal yang sangat penting adalah jarak tempuh yang relatif tidak bisa jauh karena sepeda tersebut harus dijalankan secara manual. Pada tugas akhir ini telah dikembangkan desain kursi roda sederhana yang lebih stabil dengan dilengkapi dua pilihan penggerak, manual dan elektrik. Kata kunci: Kursi roda, Tricycle, Hybrid.
1. PENDAHULUAN
Keberadaan kursi roda merupakan hal yang sangat penting dalam kehidupan seseorang yang mempunyai kekurangan dalam bergerak karena kelumpuhan. Saat ini telah banyak kursi roda yang ada dipasaran dengan segala kelengkapan dan kecanggihannya.. Kursi roda yang sederhana digerakkan oleh kedua tangan pada lingkaran yang terpasang pada kedua roda. Dengan kursi roda ini penderita cacat dapat beraktifitas walaupun dengan jarak yang terbatas. Untuk jarak yang relatif jauh maka dipasaran juga telah dijual kursi roda dengan yang dilengkapi dengan motor dengan baterei. Harga kursi roda manual sekitar 1,5 juta rupiah, sementara itu kursi roda elektris harganya lebih dari 5 juta rupiah. Hal ini tentu saja sangat memberatkan bagi para penyandang cacat yang rata-rata dari golongan menengah ke bawah.
Salah satu paguyuban penderita cacat yang berada dibawah naungan PUSDAKOTA (Pusat Pemberdayaan Masyarakat Perkotaan) Universitas Surabaya adalah CONFIDENT. Dalam kehidupan di masyarakat para peyandang cacat yang kebanyakan dari kalangan menengah ke bawah ini telah merancang sebuah kursi roda sederhana sebagai alat bantu yang digunakan untuk beraktifitas sehari-hari. Salah satu hasil kreasi mereka berupa sepeda yang dimodifikasi menjadi kursi roda dengan penggerak tangan untuk mengayuh sepeda. Perangkat ini menemani mereka beraktifitas dengan segala kelebihan dan kekurangannya. Desain yang sangat sederhana mampu menekan biaya yang dibutuhkan dalam pembuatan. Walaupun demikian masih banyak hal yang menjadi kendala dan membutuhkan rancang bangun ulang antara lain terjadinya
gesekan antara rantai sepeda dengan kerangka pada saat belok ke kanan, Hal ini menyebabkan pengendaranya mengalami kesulitan ketika berada dalam tikungan ke kanan khususnya pada jalan menanjak.
Kesulitan lain yang muncul adalah ketika mereka harus menempuh jarak yang relatif jauh mengingat sarana dan prasarana umum khususnya transportasi masih belum tersedia. Dengan demikian mereka harus tetap menggunakan dan mengayuh sepeda yang dimodifikasi sebagai kursi roda ini menjadi beberapa etape untuk melepas lelah. Adanya penambahan motor elektrik akan sangat membantu pengendara dalam menempuh jarak yang relatif jauh dengan menggunakan motor dan kayuhan manual secara bergantian. Desain kursi roda hybrid merupakan gabungan dari kursi roda manual dan elektrik sehingga pengguna tidak akan terdampar apabila energi listrik yang tersimpan dalam baterai telah habis.
2. TEORI PENUNJANG
2.1 Kursi Roda 2.1.1 Kursi Roda Manual
Kursi Roda Manual adalah kursi roda yang digerakkan dengan tangan si pemakai kursi roda, merupakan kursi roda yang biasa digunakan untuk semua kegiatan. Kursi roda seperti ini tidak dapat digunakan oleh penderita cacat yang mempunyai kecacatan ditangannya.
Gambar 2.1 Kursi Roda Manual
2.1.2 Kursi Roda Listrik
Kursi Roda Listrik adalah kursi roda yang digerakkan dengan motor listrik yang biasanya digunakan untuk perjalanan jauh bagi penderita cacat atau bagi penderita cacat ganda sehingga tidak mampu untuk menjalankan sendiri kursi roda, untuk menjalankan kursi roda mereka cukup dengan menggunakan tuas seperti joystick untuk menjalankan maju, mengubah arah kursi roda belok kiri atau belok kanan dan untuk mengerem jalannya kursi roda. Biasanya kursi roda listrik dilengkapi dengan alat untuk mengisi ulang baterainya yang dapat langsung dimasukkan dalam stop kontak di rumah atau bangunan yang dikunjungi.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
2
Gambar 2.2 Kursi Roda Listrik
2.2 Jalur Ramp
Ramp adalah jalur sirkulasi yang memiliki bidang dengan kemiringan tertentu sebagai alternatif bagi orang yang tidak dapat menggunakan tangga/peyandang cacat. Ramp dirancang supaya memberi kemudahan bagi penyandang cacat untuk dapat menuju, mencapai, memasuki, dan menggunakan secara mandiri tanpa merasa menjadi obyek belas kasihan (object of charity).
Gambar 2.3 Jalur Ramp
Persyaratan teknis aksesibilitas yang mungkin diterapkan dalam perancangan khususnya di Indonesia dapat dilihat pada Keputusan Menteri PU No.468/KPTS/1998 tentang Persyaratan Aksesibilitas Pada Bangunan Gedung dan Lingkungan. Berikut ini adalah persyaratan keberadaan ramp:
• Kemiringan suatu ramp di dalam bangunan tidak boleh melebihi 7º (sudut antara garis kemiringan ramp dengan bidang horizontal). Perhitungan kemiringan tersebut tidak termasuk awalan atau akhiran ramp (curb ramps landing). Awalan dan akhiran ramp lebih landai lagi. Sedangkan kemiringan suatu ramp yang berada di luar bangunan maksimum 6º.
• Panjang mendatar dari satu ramp (dengan kemiringan 7º) tidak boleh lebih dari 900 cm. Panjang ramp dengan kemiringan yang lebih rendah dapat lebih panjang. Jika panjang ramp melebihi ketentuan, maka setiap 9 m terdapat bordes sebagai tempat istirahat sementara.
• Bordes (jalan datar) pada awalan atau akhiran dari suatu ramp harus bebas dan datar sehingga memungkinkan untuk memutar kursi roda dengan ukuran minimum 160 cm.
• Lebar minimum dari ramp adalah 95 cm tanpa tepi pengaman dan 136 cm dengan tepi pengaman. Untuk ramp yang digunakan sekaligus untuk pejalan kaki dan pelayanan angkutan barang harus dipertimbangkan secara seksama lebarnya sehingga bisa dipakai untuk kedua fungsi tersebut atau dilakukan pemisahan ramp dengan fungsi yang berbeda-beda.
• Permukaan datar awalan atau akhiran suatu ramp harus memiliki tekstur sehingga tidak licin baik diwaktu hujan.
• Lebar tepi pengaman ramp (low curb) adalah 10 cm dirancang untuk menghalangi roda kursi roda agar tidak terperosok atau keluar dari jalur ramp. Apabila berbatasan langsung dengan lalu lintas jalan umum atau persimpangan harus dibuat sedemikian rupa agar tidak mengganggu jalan umum.
• Ramp harus diterangi dengan pencahayaan yang cukup sehingga membantu pencahayaan di waktu malam hari. Pencahayaan disediakan pada bagian bagian ramp yang memiliki ketinggian terhadap muka tanah sekitarnya dan bagian bagian yang membahayakan.
• Ramp harus dilengkapi dengan pegangan rambatan (handrail) yang dijamin kekuatannya dengan ketinggian yang sesuai sebagai pegangan sewaktu tuna daksa tidak bersama pemandu.
2.3 Pulse Width Modulation
Sinyal PWM pada umumnya memiliki amplitude dan frekuensi dasar yang tetap, namun lebar pulsanya yang bervariasi. PWM (Pulse width modulation) adalah suatu cara modulasi, dimana gelombang pembawa yang digunakan terdiri dari pulsa-pulsa segi empat yang berulang-ulang, dengan lebar pulsa yang dapat diubah-ubah oleh amplitudo dari sinyal informasi.
PWM dipergunakan dalam pengaturan tegangan, tegangan beban diatur dengan cara mengatur duty cycle dari gelombang kotak yang disupplykan ke basis dari switching transistor.
Gambar 2.4 Pulse Width Modulation
Gambar diatas menunjukkan bentuk sinyal PWM. Ton
menunjukkan waktu output sinyal PWM high dan Toff menunjukkan waktu output sinyal PWM low. Sedangkan Ttotal adalah jumlah waktu antara Ton dan Toff atau disebut juga periode sinyal PWM.
Perbandingan antara Ton dan Toff disebut dengan Duty cycle.
Nilai Duty cycle dari PWM dapat ditentukan dengan persamaan berikut :
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
3
Gambar 2.5 Duty Cycle PWM
Duty cycle 10% berarti perbandingan antara level high dan level low 1:9. Duty cycle 50% berarti perbandingan antara level high dan level low seimbang atau 1:1. Duty cycle 90% berarti perbandingan antara level high dan level low 9:1. Jika PWM diaplikasikan untuk mengatur kecepatan motor DC, semakin besar Duty Cycle maka semakin cepat perputaran motor DC. Dan sebaliknya, semakin kecil Duty cycle maka semakin pelan perputaran motor DC. 2.4 Driver Motor
Rangkaian driver motor DC ini disebut dengan h-bridge dikarenakan konfigurasi/susunan transistornya spt membentuk huruf H. Transistor-transistor pada rangkaian ini digunakan sebagai switching sehingga nantinya motor dapat berputar searah jarum jam (clockwise) dan berlawanan arah jarum jam (counterclockwise).
Gambar 2.11 H-Bridge
2.5 Sel Surya Sel surya atau sel photovoltaic adalah suatu alat
semikonduktor yang mengkonversi foton (cahaya) ke dalam listrik. Konversi ini disebut efek photovoltaic. Efek photovoltaic adalah energi potensial listrik yang terbangun antara dua material yang berbeda ketika hubungan bahan yang sejenis (common junction) disinari oleh radiasi foton.
Gambar 2.6 Simbol Sel Surya Proses pengubahan atau konversi cahaya matahari
menjadi listrik dimungkinkan karena bahan material yang menyusun sel surya berupa semikonduktor. Lebih tepatnya tersusun atas dua jenis semikonduktor; yakni jenis n dan jenis p. Semikonduktor jenis n merupakan semikonduktor yang memiliki kelebihan elektron, sehingga kelebihan muatan negatif, (n = negatif). Sedangkan semikonduktor jenis p memiliki kelebihan hole, sehingga disebut dengan p ( p = positif) karena kelebihan muatan positif. Caranya, dengan
menambahkan unsur lain ke dalam semikonduktor, maka kita dapat mengontrol jenis semikonduktor tersebut, sebagaimana diilustrasikan pada gambar di bawah ini.
Gambar 2.7 Penambahan Unsur Sel Surya
3. PERANCANGAN ALAT
3.1 Perancangan Mekanik Kursi Roda Tahap perancangan mekanik kursi roda ini dibagi menjadi
dua bagian, perancangan mekanik penggerak manual dan perancangan mekanik penggerak motor listrik.
Rancangan kursi roda secara umum dapat dilihat pada gambar berikut:
Gambar 3.1 Rancangan Kursi Roda Tampak Samping
Motor listrik berfungsi sebagai penggerak roda belakang kursi roda sehingga dapat bergerak kearah yang diinginkan dengan kecepatan yang ditentukan. Motor penggerak dapat bergerak setelah mendapat perintah dari driver motor. Motor yang digunakan sebagai bagian dari mekanik kursi roda adalah jenis motor DC 24 Volt, 7.5 Ampere.
Gambar 3.2 Motor Penggerak
Sistem penggerak motor listrik menggerakkan roda bagian
belakang. Pada bagian belakang terdapat dua roda. Karena hanya menggunakan satu motor penggerak, maka dua roda belakang
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
4
dirancang saling independent. Salah satu roda akan dihubungkan dengan motor penggerak dengan rantai dan satu roda yang lain adalah roda bebas. Hal ini dilakukan dengan tujuan agar putaran roda menjadi sinkron saat kursi roda berbelok. 3.2 Perancangan Board Kontroller
Board kontroller berfungsi untuk mengatur arah gerak kursi roda maju atau mundur. Board kontroller juga berfungsi mengatur kecepatan gerak kursi roda. Board kontroller ini terdiri atas rangkaian driver motor dan rangkaian mikrokontroller. 3.2.1 Rangkaian Driver Motor
Rangkaian driver motor akan dilalui arus yang cukup tinggi. Sesuai dengan spesifikasi motor yang digunakan, arus yang melalui driver motor mencapai 7.5 Ampere. Oleh karena itu dipilih relay sebagai driver motor yang akan mengatur arah
gerak kursi roda maju atau mundur.
Gambar 3.3 Driver Motor
3.2.2 Rangkaian Kontrol Panel Surya Rangkaian kontrol panel surya berfungsi untuk
mengatur pengisian aki yang diisi energi listrik yang berasal dari panel surya. Rangkaian kontrol mengatur pengisian aki secara bergantian. Rangkaian terdiri dari rangkaian timer menggunakan LM555, decade shifter menggunakan LM4017. Rangkaian timer memicu decade shifter untuk mengatur agar aki dapat diisi secara bergantian. Rancangan rangkaian kontrol dapat dilihat pada gambar 3.16 berikut:
Gambar 3.17 Rancangan Kontrol Panel Surya
Panel surya yang digunakan adalah panel surya
buatan AEG-TELEFUNKEN dengan tipe TSG MQ-36. Panel surya tipe ini telah diproduksi sejak tahun 1976. Data karakteristik panel surya dapat dilihat pada tabel berikut:
Tabel 3.1 Photovoltaik Modul AEG-Telefunken TSG MQ 36 (temperature 25°C)
year 1976 2011
rated power 10,3 W 9,9 W open circuit voltage 21,0 V 20,3 V
short circuit current 685 mA 664 mA
MPP-voltage 16,6 V 16,6 V
MPP-current 630 mA 607 mA efficiency 8,55 % 8,2 %
Gambar 3.16 Panel Surya
3.2.3 Perancangan Perangkat Lunak (Software) Pada tahap ini akan dilakukan perencanaan perangkat lunak.
Perangkat lunak ini akan membaca sinyal analog dari potensiometer kemudian menterjemahkannya menjadi 8-bit sinyal digital. 8-bit data digital itu kemudian di gunakan sebagai sinyal kontrol driver motor penggerak kursi roda. Sinyal tersebut berfungsi untuk menentukan arah putaran dan kecepatan putaran motor yang akan menentukan arah dan kecepatan gerak kursi roda.
Pada motor dc terdapat encoder dengan jumlah 240 celah piringan. Dengan perhitungan berikut didapatkan persamaan untuk mencari rpm motor: Jumlah lubang encoder = 240 Waktu sampling = 500ms = 1/120 menit
1201
240counter
rpm =
240120×
=counterrpm
2counterrpm =
Data rpm juga dapat dikonversi ke kecepatan kursi roda. Kecepatan kursi roda didapat dari perhitungan berikut: Diameter roda = 20 inch = 0.508 meter = 5.08 x 10-4
Rasio motor : gearbox = 25 : 1 Rasio gear motor : gear roda = 18 : 22
60××××= VdrasiogearV π (km/jam)
601008.5722
2218
251 4 ××××××= − rpmV (km/jam)

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
5
725601008.518 4
×××××
=− rpmV (km/jam)
175104.5486 4 rpmV ××
=−
(km/jam)
rpmV ××= −41035.31 (km/jam)
rpmV ×= 003135.0 (km/jam)
4. PENGUJIAN ALAT
Pengujian alat dilakukan untuk mengetahui fungsional setiap sistem serta sistem secara keseluruhan. Pengujian yang dilakukan meliputi : 1. Pengujian mekanik penggerak manual yaitu pengujian
sudut belok. 2. Pengujian perangkat keras meliputi pengujian motor, driver
motor, rangkaian mikrokontroller, generator PWM. 3. Pengujian keseluruhan sistem
4.1 Pengujian Mekanik Penggerak Manual
Pengujian ini dilakukan untuk mengetahui sudut belok kemudi pada kursi roda. Sudut belok yang ingin dicapai adalah minimal 90º ke arah kanan dan 90º ke arah kiri. Sebelum ditambahkan railer gear sudut belok ke arah kanan terbatas hingga 15º. Setelah kemudi ditambahkan railer gear sudut belok mencapai 90º. Sudut belok hasil modifikasi kemudi kursi roda dapat dilihat pada gambar 4.1 berikut:
Gambar 4.1 Sudut belok kemudi
4.2 Pengujian Perangkat Keras Pengujian perangkat keras meliputi pengujian motor
dc, driver motor, rangkaian mikrokontroller dan generator PWM. Bagian-bagian tersebut merupakan komponen dari sistem penggerak motor listrik. 4.2.1 Pengujian Motor DC
Pengujian motor bertujuan untuk mengetahui karakteristik motor yang digunakan sebagai penggerak kursi roda. Pada motor terdapat name plate yang mencantumkan spesifikasi dari motor yaitu 24 volt dan 7.5 ampere. Hasil pengujian motor ditunjukkan pada tabel 4.1.
Tabel 4.1 Pengujian Kecepatan Motor Tegangan
Supply (Volt) PWM
Duty Cycle PWM
Dalam bit Kecepatan
(rpm) 24 100% 0 5213 24 90 % 12 5179 24 80 % 25 5149 24 70 % 38 5105 24 60 % 51 5059 24 50 % 63 4999 24 40 % 76 4898 24 30 % 89 4735 24 20 % 102 4356 24 10 % 115 3194 24 0 % 128 0 24 10% 141 3252 24 20 % 153 4446 24 30 % 166 4872 24 40 % 179 5075 24 50 % 191 5203 24 60 % 204 5291 24 70 % 217 5354 24 80 % 230 5403 24 90 % 242 5431 24 100 % 255 5472
Berdasarkan data pengujian kecepatan motor, dapat dibuat kurva karakteristik dari motor sebagaimana ditunjukkan pada gambar berikut:
0
1000
2000
3000
4000
5000
6000
0 10 20 30 40 50 60 70 80 90 100
d u t y c y c l e
rpm
maju mundur Gambar 4.2 Karakteristik Motor
Selain arus dan kecepatan, parameter penting yang
seharusnya diukur yaitu torsi motor yang menentukan kekuatan motor dalam menggerakkan beban, hal ini dipengaruhi oleh rasio gearbox pada poros keluaran motor. Akan tetapi karena pengukurannya memerlukan peralatan khusus (torquemeter), pengujian parameter ini tidak dilakukan. Pengujian kekuatan motor dilakukan dengan uji coba langsung pada beban, sehingga dapat diketahui seberapa besar kekuatan motor dalam menggerakkan beban.
4.2.2 Pengujian Driver Motor
Pengujian Driver motor bertujuan untuk mengetahui fungsi serta keandalan driver motor. Parameter yang diuji meliputi polaritas yang dihasilkan serta besarnya tegangan jatuh (droped voltage) pada MOSFET. Pengujian dilakukan dengan memberikan tegangan masukan sebesar 25 Volt.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
6
Tabel 4.2 Pengujian Driver Motor
NO Sinyal Kontrol (Volt)
PWM Duty Cycle
Output (Volt)
1 0 100% -24 2 5 100% 24
Dari data di atas diketahui bahwa driver motor dapat berfungsi dengan baik untuk mengatur arah putaran motor. Dapat diindikasikan dengan polaritas output yang terbalik ketika sinyal kontrol dibalik. Drop tegangan pada driver relatif kecil yaitu sekitar 0.4Volt.
4.2.3 Pengujian Generator PWM
Pengujian generator PWM dilakukan pada rangkaian mikrokontroller pada pin OC1A sebagai penghasil sinyal PWM. Hasil pengujian generator PWM berdasarkan duty cyclenya diperlihatkan oleh gambar 4.3. Dari data percobaan didapatkan informasi bahwa generator PWM dapat menghasilkan sinyal PWM dengan duty cycle 0-100%.
10 % 20 %
30 % 40 %
50 % 60 %
70 % 80 %
90 % 100 %
Gambar 4.3 Sinyal Output Generator PWM Berdasarkan Duty
Cycle 4.2.4 Pengujian Rangkaian Kontrol Panel Surya
Pengujian rangkaian kontrol panel surya ini dilakukan pada keluaran rangkaian rangkaian timer dan keluaran rangkaian kontrol panel surya. Keluaran pada rangkaian timer menunjukkan sinyal dengan frekuensi 1.56 kHz seperti yang dapat dilihat pada gambar berikut :
Gambar 4.4 Sinyal Output Timer
Frekuensi sinyal keluaran dari rangkaian kontrol panel surya adalah 1/10 dari sinyal timer. Sehingga frekuensi sinyal kontrol menjadi 156 Hz dengan duty cycle 30% seperti yang terlihat pada gambar berikut:
Gambar 4.5 Sinyal Output Kontrol Panel Surya
4.3 Pengukuran Tegangan dan Arus Panel Surya Pengujian panel surya ini bertujuan untuk mengetahui
kondisi tegangan dan arus keluaran panel surya pada waktu dan cuaca yang berbeda. Pengukuran dilakukan pagi antara jam 09.00 sampai jam 10.00, siang antara jam 12.00 sampai jam 13.00. dan sore antara jam 15.30 sampai jam 16.30. Hasil pengukuran tegangan dan arus dapat dilihat pada tabel berikut:
Tabel 4.3 Pengukuran Panel Surya
Waktu Cuaca Cerah Cuaca Mendung
Tegangan (Volt)
Arus (mA)
Tegangan (Volt)
Arus (mA)
Pagi 18.7 582 15.8 627 Siang 19.2 543 16.4 620 Sore 18.4 593 15.3 638
4.4 Pengujian Keseluruhan Sistem
Pengujian keseluruhan sistem kursi roda meliputi pengujian kursi roda melaju di jalan datar karamik, jalan datar paving, jalan datar aspal serta pada jalan tanjakan khusus kursi roda yang sesuai dengan standar bangunan.
4.4.1 Pengujian Pada Jalan Datar Lantai
Pengujian kecepatan kursi roda di jalan datar yang terbuat dari lantai keramik yang rata dilakukan di lobby Pusat Robotika ITS. Jarak tempuh untuk uji kecepatan terbatas 30 meter. Arus rata-rata yang melalui motor terbaca 5.1 hingga 5.4 Ampere. Hasil pengujian kecepatan kursi roda di jalan datar lantai dapat dilihat pada tabel berikut ini:
Tabel 4.4 Pengujian Kecepatan Kursi Roda di Jalan Datar Lantai PWM
Duty Cycle PWM
Dalam bit Kecepatan
(rpm) Kecepatan (km/jam)
100% 0 4278 13.41 90 % 12 3974 12.45 80 % 25 3877 12.15 70 % 38 3751 11.75 60 % 51 3572 11.19 50 % 63 3350 10.51 40 % 76 2864 8.97 30 % 89 2356 7.38 20 % 102 614 1.92 10 % 115 75 0.24 0 % 128 0 0
4.4.2 Pengujian Pada Jalan Datar Paving Pengujian kecepatan kursi roda di jalan paving dilakukan di
lapangan parkir Pusat Robotika ITS. Jalan paving mewakili jalan yang
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
7
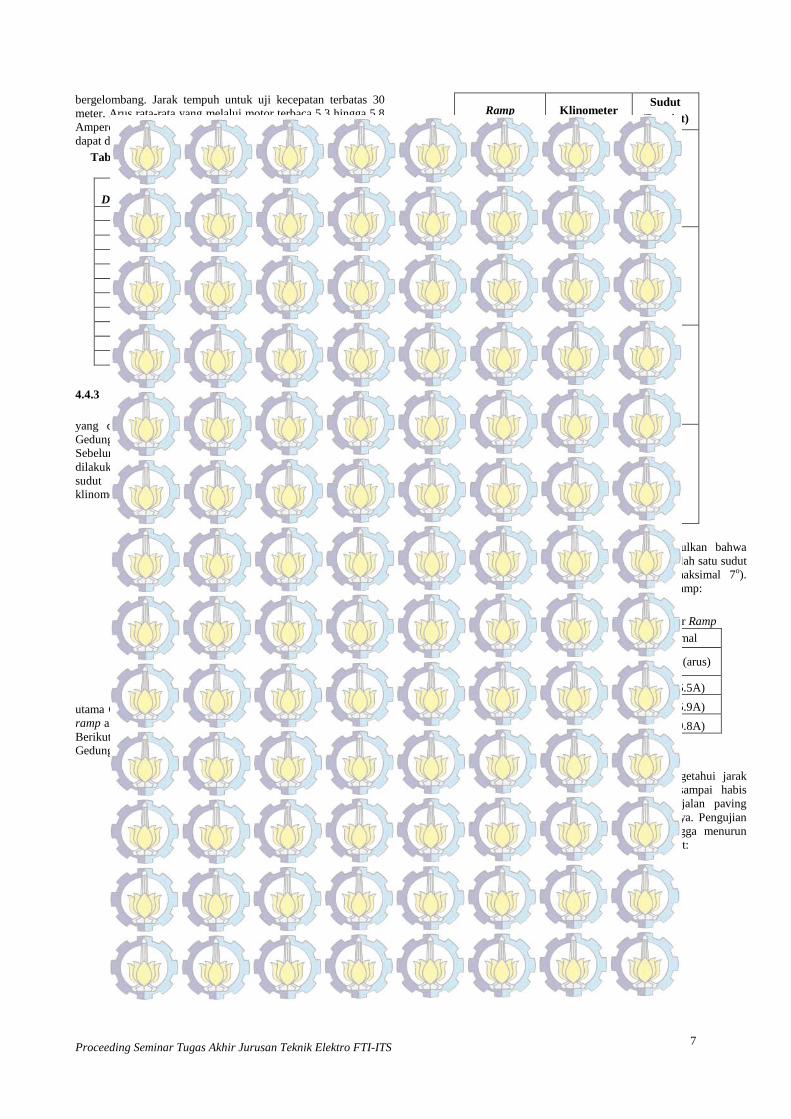
bergelombang. Jarak tempuh untuk uji kecepatan terbatas 30 meter. Arus rata-rata yang melalui motor terbaca 5.3 hingga 5.8 Ampere Hasil pengujian kecepatan kursi roda di jalan paving dapat dilihat pada tabel berikut ini:
Tabel 4.5 Pengujian Kecepatan Kursi Roda di Jalan Datar Paving
PWM Duty Cycle
PWM Dalam bit
Kecepatan (rpm)
Kecepatan (km/jam)
100% 0 4149 13.01 90 % 12 3977 12.46 80 % 25 3753 11.76 70 % 38 3547 11.12 60 % 51 3067 9.61 50 % 63 2734 8.57 40 % 76 2343 7.34 30 % 89 2054 6.43 20 % 102 144 0.45 10 % 115 57 0.17 0 % 128 0 0
4.4.3 Pengujian Pada Jalan Tanjakan
Jalan tanjakan pada bangunan atau biasa disebut ramp yang digunakan untuk pengujian adalah fasilitas ramp di Gedung Robotika ITS. Gedung ini memiliki 4 buah ramp. Sebelum melakukan pengujian sistem, terlebih dahulu dilakukan pengukuran sudut kemiringan ramp. Pengukuran sudut kemiringan ramp dilakukan dengan menggunaan klinometer sederhana seperti yang terlihat pada gambar 4.4.
Gambar 4.6 Klinometer Sederhana
Jalur ramp yang diukur adalah ramp lobby bangunan
utama Gedung robot ITS, ramp akses menuju ruang workshop, ramp akses menuju ruang lab dan ramp akses menuju lapangan. Berikut adalah hasil pengukuran sudut kemiringan ramp di Gedung Robotika ITS:
Ramp Klinometer Sudut
(Derajat)
Ramp lobby
gedung
10
Ramp akses ke
workshop
6
Ramp akses ke
lab
5
Ramp akses ke
lapangan
6
Gambar 4.7 Pengukuran Ramp Dari hasil pengukuran ramp dapat disimpulkan bahwa
terdapat tiga variasi sudut yaitu 5o, 6o dan 10o dengan salah satu sudut tidak memenuhi standar kemiringan jalur ramp (maksimal 7o). Berikut ini adalah hasil pengujian sistem mendaki jalur ramp:
Tabel 4.6 Pengujian Kecepatan Kursi Roda di Jalur Ramp
Sudut Ramp
Tertahan Diam Kecepatan Maksimal Bit
ADC Duty Cycle rpm km/jam (arus)
5 43 66% 1443 3.05 (6.5A) 6 36 72% 1104 2.32 (6.9A) 10 14 87% 621 1.24 (9.8A)
4.4.4 Pengujian Daya Tahan Sistem
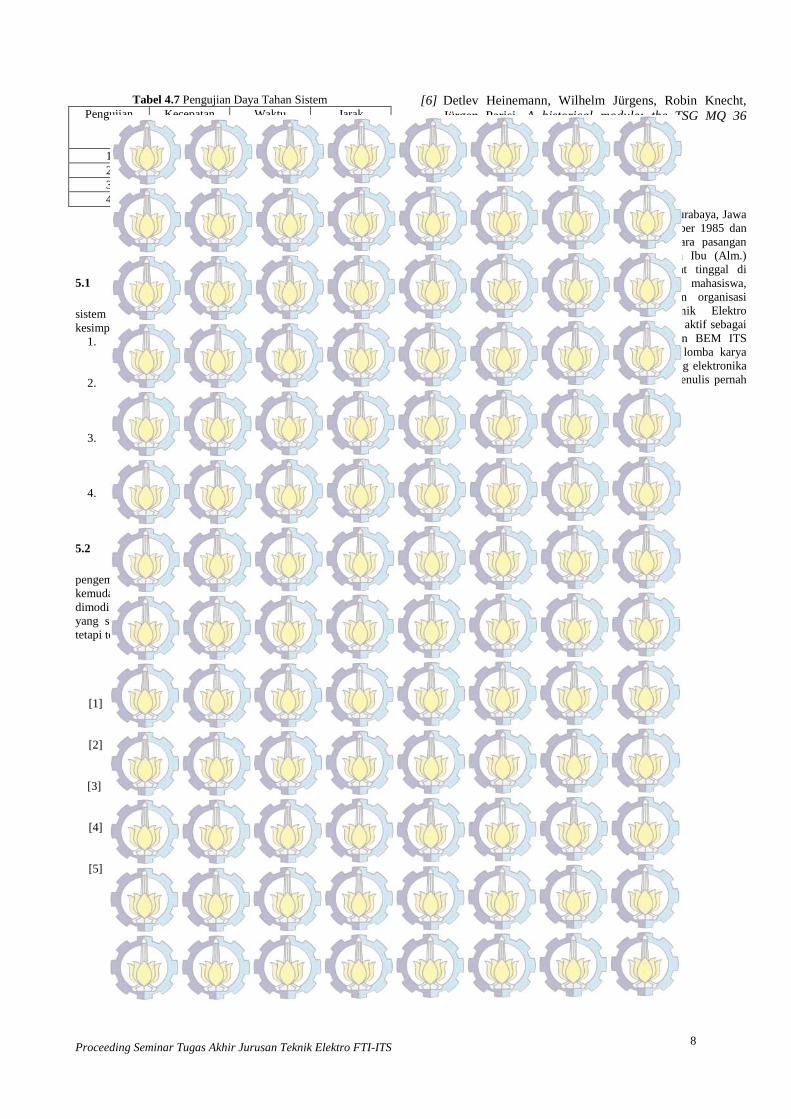
Pengujian daya tahan bertujuan untuk mengetahui jarak tempuh kursi roda dari kondisi aki terisi penuh sampai habis digunakan. Pengujian daya tahan dilakukan pada jalan paving disekitar Institut Teknologi Sepuluh Nupember Surabaya. Pengujian dibatasi saat tegangan aki menunjuakkan 25.4V hingga menurun menjadi 23.9V. Hasil pengujian terlihat pada tabel berikut:
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
8
Tabel 4.7 Pengujian Daya Tahan Sistem Pengujian Kecepatan
rata-rata (km/jam)
Waktu tempuh (menit)
Jarak Tempuh (km)
1 12.6 43 9.03 2 12.8 40 8.53 3 12.9 41 8.81 4 12.7 38 8.05
5. PENUTUP 5.1 Kesimpulan
Berdasarkan hasil pengujian dan pengukuran seluruh sistem dalam Tugas Akhir ini dapat diambil beberapa kesimpulan yaitu:
1. Sistem secara keseluruhan mampu melaju di jalan datar dengan kecepatan maksimal 13.41 km/jam di jalan lantai dan 13.1 km/jam di jalan paving.
2. Sistem secara keseluruhan mampu melaju jalan tanjakan 5o dengan kecepatan maksimal 3.05km/jam, 6o dengan kecepatan maksimal 2.32 km/jam dan 10o dengan kecepatan maksimal 1.24 km/jam.
3. Pada tanjakan 10o arus yang melalui motor 9.8 ampere melebihi kapasitas motor 7.5 ampere sehingga menyebabkan motor menjadi panas dan berpotensi rusak.
4. Sistem kemudi masih harus dimodifikasi ulang karena saat kursi roda mundur diajalankan oleh motor, tuas pengayuh juga ikut berputar.
5.2 Saran Adapun saran untuk penerapan maupun
pengembangan lebih lanjut jika alat ini akan digunakan untuk kemudahan pengguna kursi roda maka sistem kemudi harus dimodifikasi ulang agar lebih stabil serta pemilihan jenis motor yang sesuai sehingga dapat lebih menghemat tenaga baterei tetapi tetap harus dapat melaju di jalur tanjakan.
DAFTAR PUSTAKA
[1] Achmad Solichin. Pemrograman Bahasa C dengan Turbo C. IlmuKomputer.Com. Tanggal akses: 5 Desember 2008.
[2] Richard Barnett, Larry O’cull, dan Sarah Cox. Embedded C Programming and The Atmel AVR. Canada: Delmar Learning. 2003.
[3] Slamet, M., Pengembangan Perangkat Sepeda Kursi Roda, Januari 2009. <URL: http://www.lib.ui.ac.id/>. Tanggal akses: 18 September 2011
[4] Robert Boylstead dan Louis Nashelsky. Electronic Devices and Circuit Theory ,Fifth Edition. USA: Prentice-Hall International Inc. 1992.
[5] ______,Sejarah Kursi Roda. Berbagai Hal Tentang Kursi Roda. <URL: http://www.berbagaihal.com/2011/04/berbagai-hal-tentang-kursi-roda.html >. Tanggal akses: 28 Oktober 2011
[6] Detlev Heinemann, Wilhelm Jürgens, Robin Knecht, Jürgen Parisi. A historical module: the TSG MQ 36 solar panel. 2011
[7] ______,Datasheet ATMega8, ATMEL.
RIWAYAT HIDUP PENULIS
Dwi Kurniawan dilahirkan di Surabaya, Jawa Timur, pada tanggal 9 September 1985 dan anak kedua dari dua bersaudara pasangan Bapak Bambang Sutrisno dan Ibu (Alm.) Iding Sismiati yang bertempat tinggal di Surabaya. Selama menjadi mahasiswa, penulis berperan aktif dalam organisasi Himpunan Mahasiswa Teknik Elektro 2005/2006 dan 2006/2007 serta aktif sebagai panitia dalam kegiatan-kegiatan BEM ITS aktif mengikuti lomba seperti lomba karya tulis, inovasi teknologi di bidang elektronika
dan lainnya. Selama masuk bidang studi elektronika, penulis pernah menjadi asisten lab.