laporan_pengendalian_tekanan.docx
TRANSCRIPT
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 1/11
PENGENDALIAN TEKANAN
1. PENDAHULUAN
1.1 Latar Belakang
Satu besaran penting pada proses yang melibatkan gas adalah tekanan. Pengendalian
tekanan menjadi faktor sangat penting pada proses.(1) Aliran gas ke alat berikutnya diharapkan pada tekanan konstan. Untuk menjaga nilai
tekanan perlu ditambahkan sebuah tangki tekan sebagai peredam.
(2) Banyak fungsi unit proses berjalan baik jika bekerja pada tekanan tetap. Sebagai contoh
adalah tekanan atas dan bawah kolom distilasi, reaktor fase gas, dan kolom separator gas-
cair.
1.2 Tujuan
Praktikum ini memberi kompetensi dasar pada mahasiswa yaitu kemampuan untuk dapat
mengendalikan sistem tekanan. Adapun tujuan praktikum adalah mempelajari pengaruh
nilai parameter pengendali pada respons tekanan.
2. PERALATAN PERCOBAAN
(Gambar)
3. PROSEDUR PERCOBAAN
3.2.1 Persiapan
1) Pastikan penampung tekanan gas sudah ada.
2) Sistem peralatan aliran telah terhubung secara benar dengan komputer.
3) Pastikan komputer bekerja normal.
3.2.2 Pengoperasian Perangkat Keras
1) Pastikan udara instrumen telah mengalir pada tekanan masuk 200 200 kPa (2 bar). Jika
perlu atur regulator tekanan udara instrumen agar memenuhi tekanan tersebut.
2) Nyalakan peralatan peralatan konsul PCT-10 dan unit konversi tegangan ke arus
3.2.3 Pengoperasian Perangkat Lunak
1) Nyalakan komputer/laptop dan jalankan program pressure control
2) Pastikan posisi tombol AUTO/MANUAL pada posisi MANUAL
3) Pastikan posisi tombol REVERSE/DIRECT pada posisi DIRECT
4) Tekan tombol RUN (berupa panah) sehingga pengendalian mulai berjalan5) TUTUP katup V3, V5, dan V6
6) BUKA katup V4
7) Atur manipulated variable yang merepresentasikan bukaan katup kendali dengan
menggeser horizontal scroll ke kanan hingga 100%
8) Atur katup regulator V2 sehingga tekanan yang ditunjukkan P4 atau tampilan pada
komputer (PV) sebesar 8 psi
9) TUTUP katup V4
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 2/11
10) BUKA KATUP V3
11) Atur katup V5 sehingga tekanan yang ditunjukkan P4 atau tampilan pada komputer
(PV) sebesar 8 psi. Karena respon lambat, tunggu beberapa saat sampai tekanan stabil.
3.2.4 Pengendalian Automatik
1) Geser vertical scroll SP (setpoint ) ke posisi 4 psi atau dengan cara mengetikkan nilai 4kemudian tekan ENTER.
2) Pastikan parameter pengendali dengan nilai PB = 100, waktu integral = 1, dan waktu
derivatif = 03) Ubah posisi tombol AUTO/MANUAL ke posisi AUTO
4) Amati tekanan gas (warna hijau) terhadap nilai setpoint (warna merah). Tekanan gas
akan bergerak ke arah setpoint sehingga konstan disitu.
3.2.5 Pengaruh Parameter Pengendali Tanpa Tangki Peredam
Pengendali Proporsional (P)
1) Pastikan nilai PB = 100% dan waktu derivatif, Td = 0.2) Ubah waktu integral (Ti) ke nilai yang sangat besar (misal 100000) dengan demikian
maka pengaruh integral hampir tidak ada.
3) Ubah setpoint (SP) ke 60% dengan mengetikkan angka 60 dan diikuti menekan ENTER.
4) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai
tekanan (PV).
5) Ubah setpoint (SP) kembali ke 50%, dan tunggu sampai nilai PV stabil dan konstan.
6) Ubah gain PB ke 50, 30, 10, 5, dan 2. Setiap perubahan lakukan langkah (3)-
(5). Amati nilai tekanan (PV).
7) Pilih nilai proportional band (PB) yang menghasilkan pengendalian cepat, tepat, dan
stabil.
Pengendali Proporsional-Integral (PI)
1) Gunakan nilai PB terbaik dari pengendalian proporsional di atas.
2) Pastikan SP = 50% dan tunggu hingga nilai PV konstan.
3) Ubah waktu integral bernilai 60 detik (1 menit) dan tunggu hingga nilai PV konstan.
4) Ubah setpoint (SP) ke 60%
5) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai
PV.
6) Ubah setpoint (SP) kembali ke 50%, dan tunggu sampai nilai PV stabil dan konstan.
7) Ubah waktu integral ke nilai 30, 10, 5, 2, 1 dan 0.5. Setiap perubahan lakukan langkah
(4)-(6). Amati nilai PV.
8) Pilih nilai waktu integral yang menghasilkan pengendalian cepat, tepat, dan stabil.
Pengendali Proporsional-Integral-Derivatif (PID)
1) Gunakan nilai PB dan Ti terbaik dari pengendalian PI sebelumnya.
2) Pastikan SP = 50% dan tunggu hingga nilai PV konstan.
3) Ubah waktu derivatif menjadi 1 detik.
4) Ubah setpoint (SP) ke 60%
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 3/11
5) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai
PV.
6) Ubah setpoint (SP) kembali ke 50%, dan tunggu sampai nilai PV stabil dan konstan.
7) Ubah waktu derivatif ke nilai 2, 5, 10, 20, dan 30. Setiap perubahan lakukan langkah (4)-
(6). Amati nilai PV.
8) Pilih nilai waktu derivatif yang menghasilkan pengendalian cepat, tepat, dan stabil.
3.2.7 Penyelesaian Percobaan
1) Jika sudah selesai, tekan tombol OPERASI STOP maka akan muncul tampilan untuk
mengisi nama file data, isikan dengan ekstensi XLS kemudian tekan OK.
2) Matikan peralatan seluruhnya dari sumber listrik.
3) Buka katup buang tangki sehingga kosong.
4) Bersihkan tempat kerja sehingga tidak ada sampah, kertas atau barang lain berserakan
di sekitar peralatan.
Data Pengamatan
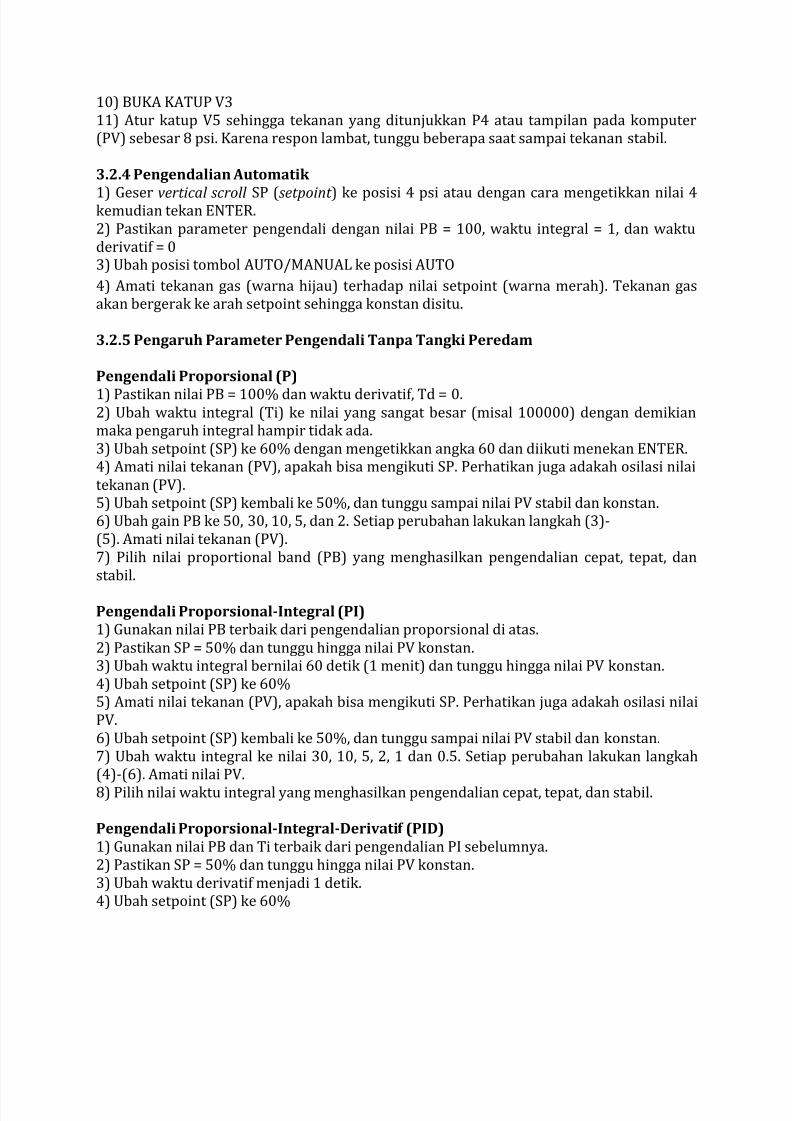
Pengendali Proporsional (P)
y = -0.459x + 36.367
R² = 0.4773
4.5
4.74.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
65.5 66 66.5 67 67.5 68 68.5
y
X
Grafik Pb2
Standar
Pb2
Linear (Pb2)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 4/11
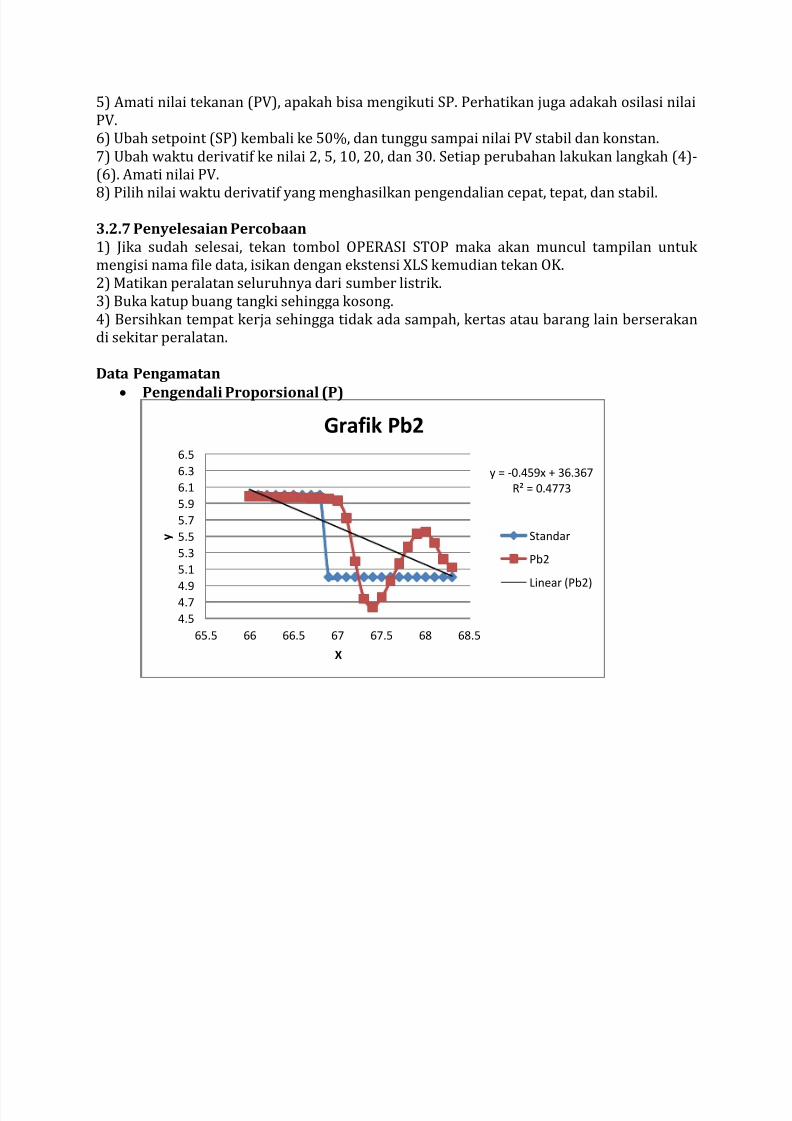
y = -0.4188x + 53.324
R² = 0.5933
4.5
5
5.5
6
6.5
112 113 114 115 116
Y
X
Grafik Pb 5
Standar
Pb5
Linear (Pb5)
y = -0.607x + 61.498
R² = 0.8056
4.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
90.5 91 91.5 92 92.5 93 93.5
A x i s T i t l e
Axis Title
Grafik Pb10
Standar
Pb10
Linear (Pb10)
y = -0.2655x + 49.277
R² = 0.931
4.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
161 162 163 164 165 166
Y
X
Grafik Pb30
Standar
Pb30
Linear (Pb30)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 5/11
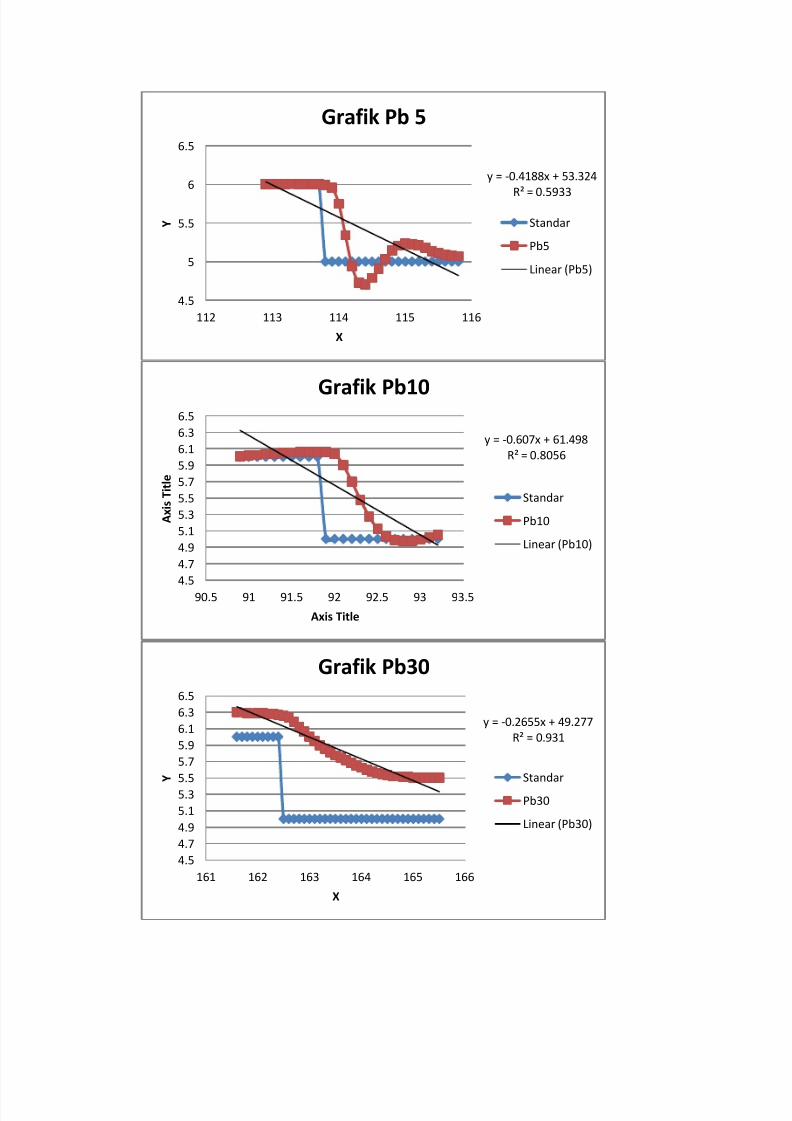
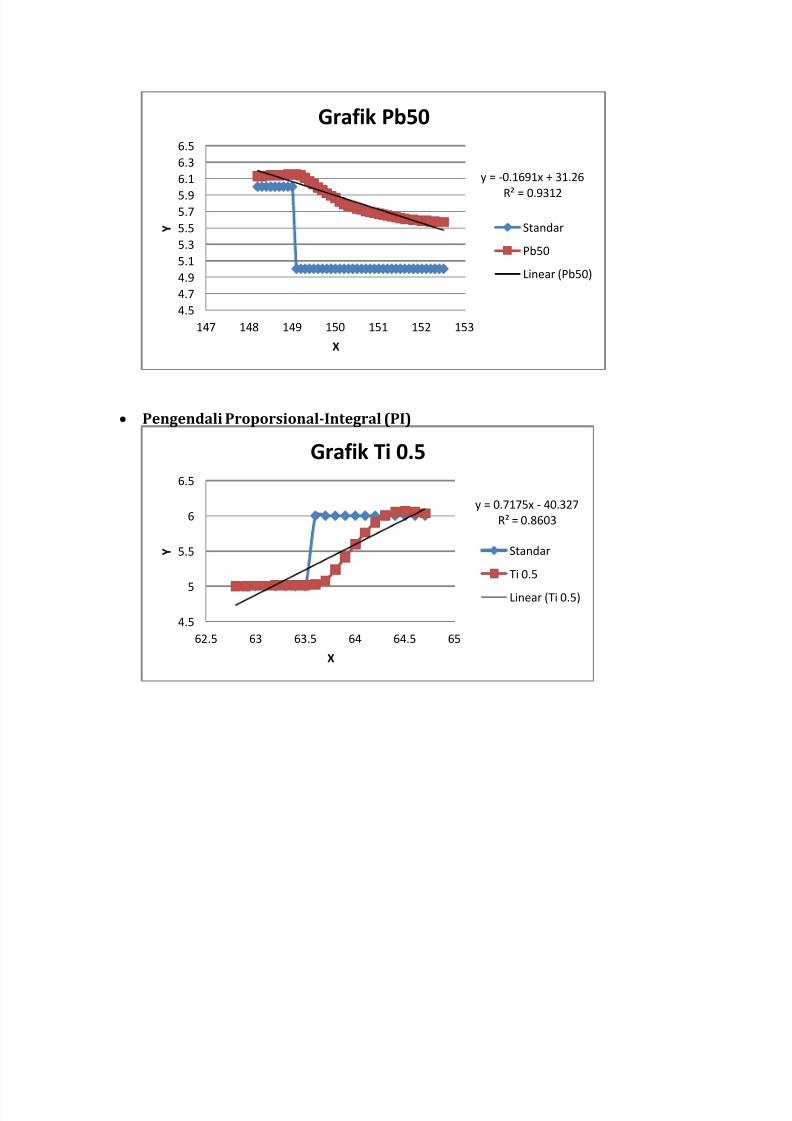
Pengendali Proporsional-Integral (PI)
y = -0.1691x + 31.26
R² = 0.9312
4.5
4.7
4.9
5.1
5.3
5.5
5.75.9
6.1
6.3
6.5
147 148 149 150 151 152 153
Y
X
Grafik Pb50
Standar
Pb50
Linear (Pb50)
y = 0.7175x - 40.327
R² = 0.8603
4.5
5
5.5
6
6.5
62.5 63 63.5 64 64.5 65
Y
X
Grafik Ti 0.5
Standar
Ti 0.5
Linear (Ti 0.5)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 6/11
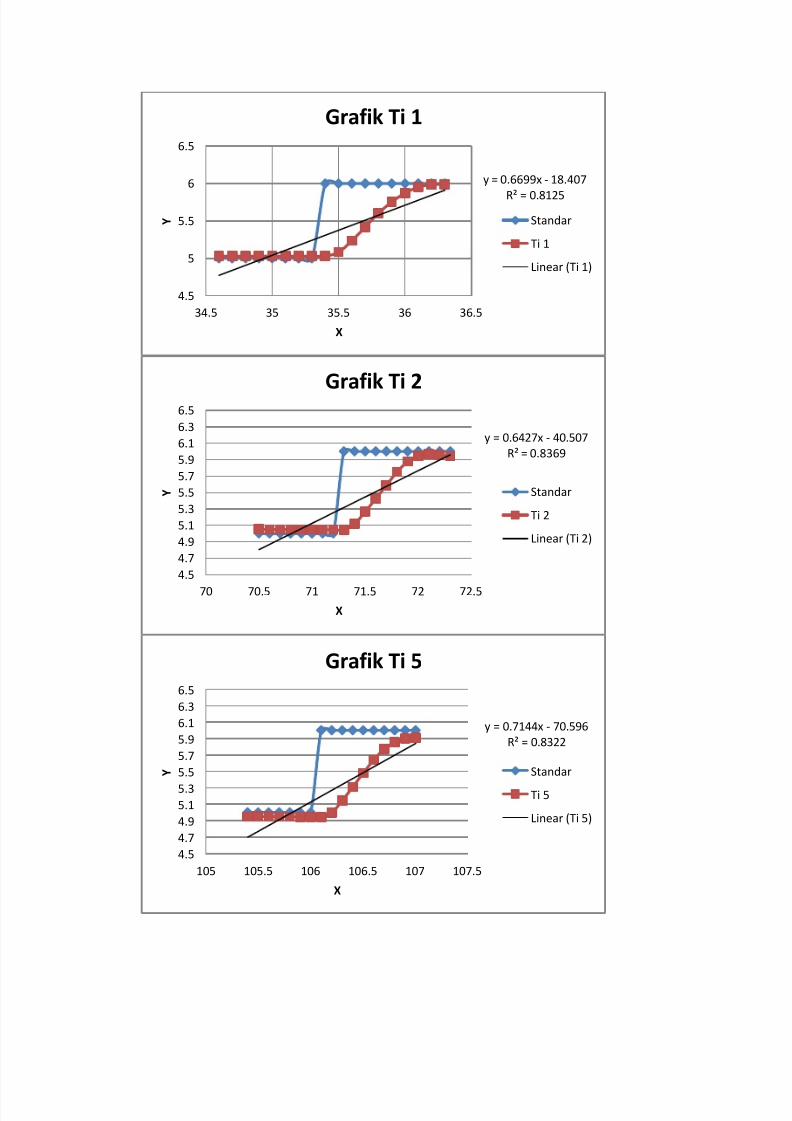
y = 0.6699x - 18.407
R² = 0.8125
4.5
5
5.5
6
6.5
34.5 35 35.5 36 36.5
Y
X
Grafik Ti 1
Standar
Ti 1
Linear (Ti 1)
y = 0.6427x - 40.507
R² = 0.8369
4.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
70 70.5 71 71.5 72 72.5
Y
X
Grafik Ti 2
Standar
Ti 2
Linear (Ti 2)
y = 0.7144x - 70.596
R² = 0.8322
4.5
4.7
4.9
5.15.3
5.5
5.7
5.9
6.1
6.3
6.5
105 105.5 106 106.5 107 107.5
Y
X
Grafik Ti 5
Standar
Ti 5
Linear (Ti 5)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 7/11
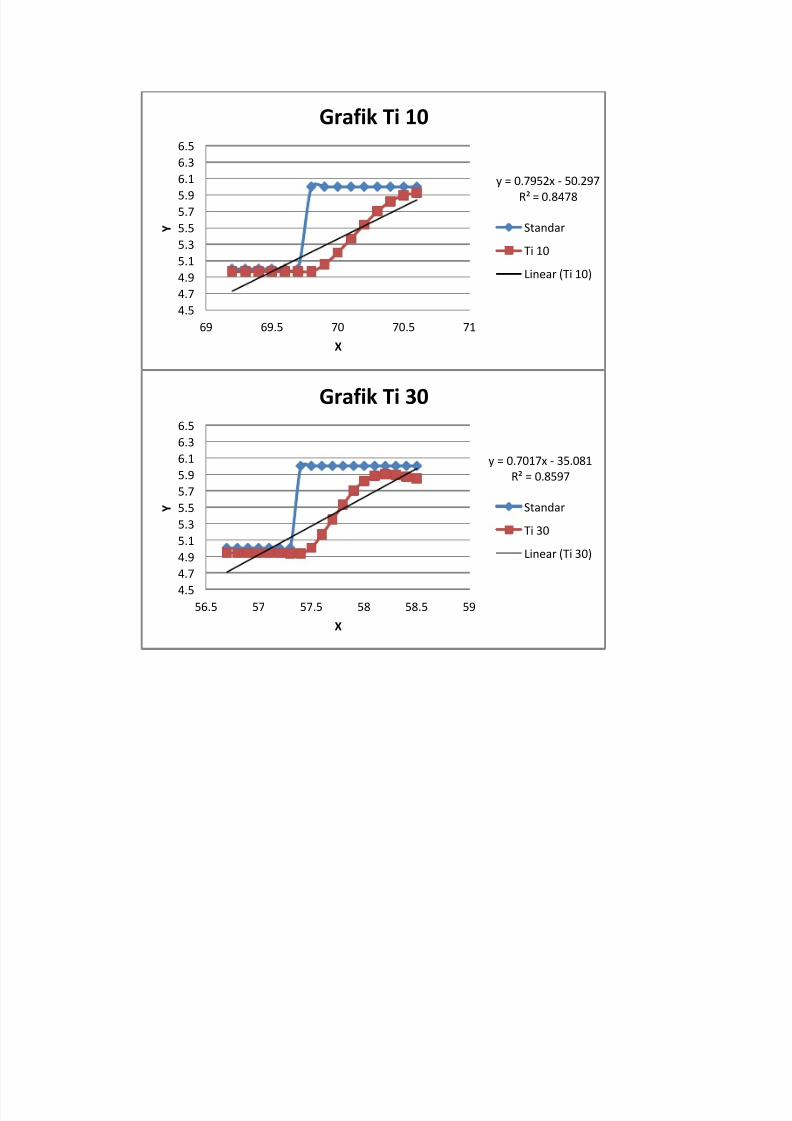
y = 0.7952x - 50.297
R² = 0.8478
4.5
4.7
4.9
5.1
5.3
5.5
5.75.9
6.1
6.3
6.5
69 69.5 70 70.5 71
Y
X
Grafik Ti 10
Standar
Ti 10
Linear (Ti 10)
y = 0.7017x - 35.081
R² = 0.8597
4.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
56.5 57 57.5 58 58.5 59
Y
X
Grafik Ti 30
Standar
Ti 30
Linear (Ti 30)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 8/11
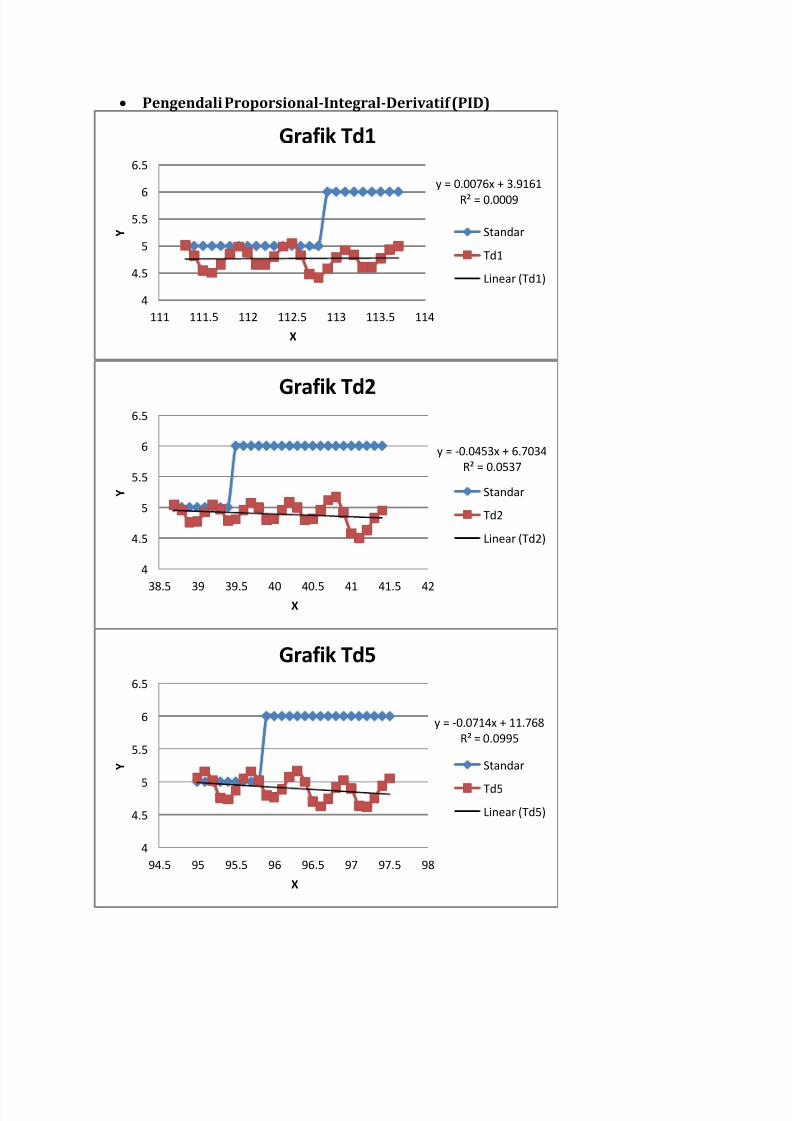
Pengendali Proporsional-Integral-Derivatif (PID)
y = 0.0076x + 3.9161
R² = 0.0009
4
4.5
5
5.5
6
6.5
111 111.5 112 112.5 113 113.5 114
Y
X
Grafik Td1
Standar
Td1
Linear (Td1)
y = -0.0453x + 6.7034
R² = 0.0537
4
4.5
5
5.5
6
6.5
38.5 39 39.5 40 40.5 41 41.5 42
Y
X
Grafik Td2
Standar
Td2
Linear (Td2)
y = -0.0714x + 11.768
R² = 0.0995
4
4.5
5
5.5
6
6.5
94.5 95 95.5 96 96.5 97 97.5 98
Y
X
Grafik Td5
Standar
Td5
Linear (Td5)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 9/11
y = -0.0158x + 6.3095
R² = 0.0055
0
1
2
3
4
5
6
7
88.5 89 89.5 90 90.5 91 91.5 92
Y
X
Grafik Td10
Standar
Td10
Linear (Td10)
y = 0.0012x + 4.6788
R² = 4E-05
0
1
2
3
4
5
6
7
53 53.5 54 54.5 55 55.5 56
Y
X
Grafik Td20
Standar
Td20
Linear (Td20)
y = 0.0022x + 5.0089
R² = 7E-05
4.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
6.5
35.5 36 36.5 37 37.5 38
Y
X
Grafik Td30
Standar
Td30
Linear (Td30)
7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 10/11
PEMBAHASANPada praktikum pengendalian tekanan ini bertujuan untuk mengetahui pengaruh nilai
parameter pengendali pada respons tekanan, sehingga nantinya praktikan dapat
mengoperasikan suatu alat dengan biaya produksi yang rendah dan nilai produk yang
maksimum. Adapun parameter pengendali yang digunakan ada 3, yaitu Proportional,
Proportional Integral dan Proportional Integral Derivatif . Tekanan yang akan dikendalikan
adalah tekanan yang berada dalam pipa yang dianggap sebagai sistem yang akan dikendalikan.
Pada pengujian pertama, praktikan menggunakan parameter pengendali Proportional
dengan cara memvariasikan nilai PB menjadi 50%, 30%, 10%, 5% dan 2% dengan waktu
integral 100000 sehingga nilai waktu integral nya nanti akan mendekati nol dan waktu
derivatif-nya pun di set pada angka nol. Hal ini dilakukan untuk mencari nilai PB yang dapat
menghasilkan pengendalian yang baik. Adapun nilai PB yang praktikan pilih ialah 10%, karena pada saat PB 10%, respon yang dihasilkan cukup cepat, settling time nya pun kecil dan osilasi
nya pun rendah. Akan tetapi, kelemahannya, pengendalian dengan system proportional ini
cenderung tidak stabil.
Menurut teori tentang sistem pengendalian proportional , semakin kecil nilai PB, maka
offset yang dihasilkan pun akan semakin kecil. Tetapi, pada kenyataannya, ketika nilai PB 2%
dan 5%, offset yang dihasilkan justru semakin besar dan settling time nya pun lebih besar
dibandingkan dengan nilai PB 10%.
Pada pengujian kedua, praktikan, praktikan menggunakan parameter pengendali
Proportional Integral (PI). Pada sistem pengendalian ini, praktikan memasukkan nilai PB 10%
yang merupakan hasil uji yang paling baik pada pengujian sistem Proportional dengan
memvariasikan nilai integrasinya menjadi 30s, 10s, 5s,2s, 1s, 0,5s dan waktu derifatif nol. Dari
variasi waktu integrasi diharapkan dapat diketahui nilai waktu integrasi yang paling baik untuk
pengendalian.
Dalam pengujian kedua ini, praktikan memperoleh waktu integral yang sesuai. Adapun
waktu integral yang digunakan sebesar 1 (satu), karena respon yang dihasilkan cenderung lebih
cepat, dan menghilangkan offset. Tetapi respon yang dihasilkannya lebih tidak stabil
dibandingkan dengan pengujian pertama (Pengujian Proportional).
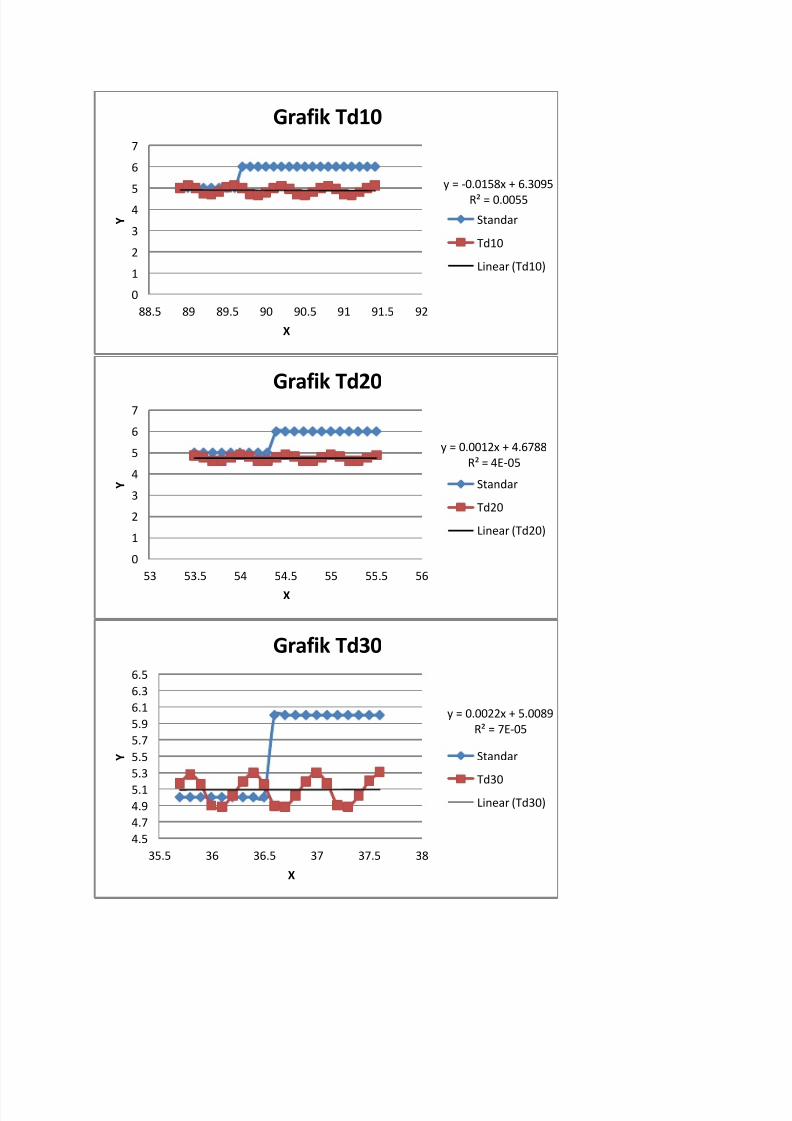
Pengujian ketiga, praktikan menggunakan parameter pengendali Proportional Integral
Derifatif. Sistem pengendalian dengan menggunakan parameter derifatif ini sangat peka

7/27/2019 LAPORAN_PENGENDALIAN_TEKANAN.docx
http://slidepdf.com/reader/full/laporanpengendaliantekanandocx 11/11
terhadap gangguan, sehingga menyebabkan proses menjadi tidak stabil. Pada sistem
pengendalian ini, praktikan memasukkan nilai waktu derifatif 20 yang merupakan hasil uji
yang paling baik pada pengujian sistem Proportional Integral Derivatif .
Adapun kendala dalam praktikum ini adalah tidak konstannya nilai tegangan yang terukur
pada voltmeter sehingga nilai tegangan yang dihasilkan tidak akurat. Nilai tekanan yang
terukur pun kurang akurat karena manometer yang digunakan tidak stabil.
KESIMPULAN
Pengendalian tekanan pada suatu sistem pengendalian bertujuan untuk mengendalikan
tekanan pada nilai yang diinginkan sebagai variabel proses dengan menggunakan
pengendalian PID.
Nilai PB yang stabil adalah 10 %.
Nilai waktu integral = 1s
Waktu derivative = 20 s
DAFTAR PUSTAKA
Jobsheet praktikum modul: Pengendalian Tekanan. Bandung: Teknik Kimia POLBAN.