jiptummpp gdl s1 2008 muhammadza 14172 i5i
TRANSCRIPT

BAB I
PENDAHULUAN
1.1. Latar Belakang
Perkembangan teknologi berjalan dengan cepat. Mesin-mesin produksi
diharapkan mampu bekerja secara efektif dan efisien. Untuk tujuan tersebut peralatan-
peralatan manual ditinggalkan diganti dengan peralatan otomatis. Mesin-mesin otomatis
tidak hanya diterapkan pada industri besar tetapi juga pada industri skala menengah
kebawah, salah satunya adalah industri batako dan paving.
Proses pencetakan batako secara manual memakan waktu yang lama dan
memerlukan tenaga yang banyak untuk produksi skala besar. Agar proses produksi
berjalan dengan cepat dan target tercapai maka peralatan manual perlu digantikan oleh
mesin-mesin otomatis.
Mengenai hal tersebut dibuat mesin cetak batako secara otomatis yang di
gerakkan oleh sistem pneumatik dan dikendalikan dengan mikrokontroler. Dengan alat
tersebut jumlah batako yang sudah dicetak juga dapat ditampilkan pada display,
sehingga orang tidak perlu menghitung batako yang sudah tercetak, cukup melihat pada
display.
1.2. Rumusan Masalah
Dari uraian penjelasan singkat di atas dapat diketahui adanya beberapa masalah
yang akan timbul, diantaranya :
a. Bagaimana.membuat sistem otomatis untuk pencetakan/pengepresan batako.

2
b. Bagaimana membuat komunikasi antara sistem dengan mekanik sedemikian rupa
sehingga tercipta suatu alat seperti yang diinginkan.
c. Bagaimana mengeset waktu untuk pencetakan batako tersebut.
1.3. Batasan Masalah
Untuk memberi gambaran yang lebih jelas dan spesifik mengenai alat ini, maka
perlu adanya pembatasan - pembatasan masalah yang akan dibahas dalam penyusunan
tugas akhir ini antara lain :
a. Motor penggerak mekanik menggunakan motor arus-searah (dc).
b. Dalam perencanaan dan pembuatan mekanis, perhitungan matematis dan
perhitungan motor dc secara fisika tidak dibahas.
c. Alat pengepres yang digunakan alat pencetak batako dengan menggunakan
pneumatik.
d. Tidak membahas proses tekanan alat tersebut.
e. Batako/paving yang dicetak seperti yang dipasang di jalan-jalan pada umumnya.
f. Satu kali pencetakan dibuat dua buah batako.
g. Sistem otomatis pada alat ini hanya pada proses getaran ( vibrasi ) dan
pengepresan.
1.4. Tujuan
Tujuan dari pembuatan alat pencetak batako ini adalah suatu alat yang dapat
mencetak/mengepres batako secara otomatis dengan menerapkan konsep pengontrolan
alat yang dirancang menggunakan mikrokontroler yang nantinya alat tersebut dapat
mengefisiensi proses pencetakan batako dan bermanfaat bagi masyarakat khususnya
usaha kecil menengah.
3
1.5 Metodologi
Untuk mendukung terselesainya penulisan tugas akhir ini, penyusun
mengunakan metode sebagai berikut :
1. Studi literature
Yaitu sebagai dasar-dasar teori yang digunakan serta data-data yang lain yang
dipakai. Pengkajian berdasarkan data-data yang didapat dari perpustakaan atau
sumber lain yang berupa buku, internet, ataupun dari buku referensi atau media-
media yang lain.
2. Perancangan, pemasangan dan perakitan Alat
Langkah-langkah yang dilakukan dalam perencanaan alat pencetak batako
otomatis ini adalah sebagai berikut :
a. Pembuatan blok diagram alat yang dirancang.
b. Perancangan pada tiap-tiap bloknya yang meliputi penentuan spesifikasi
alat, perhitungan dan penentuan komponen-komponen yang digunakan
kemudian dilanjutkan dengan pembuatan skema rangkaianya.
Pembuatan perangkat keras ( hardware ) yang dirancang meliputi :
a. Rangkaian sensor limitswitch dan rangkaian penguat operasional
( Op-Amp ).
b. Driver untuk motor DC.
c. Pembuatan prototip alat pengepres dan pencetak batako otomatis.
3. Pembuatan software
Pembuatan perangkat lunak pada perancangan dan penbuatan pengaturan ini
menggunakan program bahasa assembler dengan berpedoman pada instruksi-
instruksi keluaraga MCS51.
4. Pengujian alat
Pengujian alat apakah peralatan yang dibuat sudah sesuai dengan
perencanaan.
1.6. Sistematika Penulisan
Sistematika penulisan dan gambaran umum yang terdapat pada setiap bab adalah
sebagai berikut:

4
BAB I PENDAHULUAN, menjelaskan tentang latar belakang masalah,
rumusan masalah, ruang lingkup, tujuan, dan sistematika penulisan.
BAB II DASAR TEORI, Landasan teori terdiri dari membahas teori penunjang
dari tugas akhir yang akan dibuat.
BAB III PERENCANAAN DAN PEMBUATAN ALAT, menjelaskan tentang
perencanaan perangkat keras dan perangkat lunak untuk merealisasikan
sistem.
BAB IV PENGUJIAN DAN ANALISIS, merupakan pengujian yang dilakukan
terhadap perangkat keras dan perangkat lunak yang digunakan serta
berbagai percobaan dan analisis untuk mengetahui apakah sistem bekerja
dengan baik.
BAB V PENUTUP, berisi kesimpulan tugas akhir ini dan saran-saran yang perlu
untuk melakukan pengembangan sistem selanjutnya.

5
BAB II
DASAR TEORI
2.1. Mikrokontroler
Apabila sebuah mikroprosesor dikombinasikan dengan I/O dan memori
(RAM/ROM) maka dihasilkan sebuah mikrokomputer. Pada kenyataannya CPU,
memori dan I/0 dapat juga dilakukan dalam level chip,yang menghasilkan single chip
mikrokomputer (SCM) untuk membedakan dengan mikrokomputer untuk selanjutrya,
SCM disebut mikrokontroller.
Salah satu keuntungan pemakaian mikrokontroller dibandingkan mikroprosesor
adalah pada mikrokontroller sudah tcrdapat RAM dan peralatan l/O pendukung
sehingga tidak perlu menambahkannya.
Mikrokontroller AT89S51 termasuk dalam keluarga MCS-51, adalah produksi
dari Atmel. Mikrokontroller ini biasa digunakan dalam komputasi, industri, dan
komunikasi. Berikut ini adalah beberapa ciri-ciri yang dimiliki oleh mikrokontroller
AT89S51:
4K Bytes memori program yang dapat ditulis hingga 1000 kali.
0 kecepatan clock -33 Mhz
Operasi Secara penuh Statis: 0 Hz ke 33 MHZ.
Tiga Level Program Memori Lock.
128 x 8-bit RAM Internal.
32 jalur I/O Programmable.
Dua 16-bit Timer/Counters.
6 Sumber Interrupt.

6
Mikrokontroller AT89S51 hanya akan bekerja jika dihubungkan dengan
EPROM ( internal ). Untuk dapat mengakses EPROM internal, pena EA (eksternal
Akses) hares dihubungkan ke VCC. Sebagai sebuah piranti kontrol maka MC 89S51 ini
dapat digunakan untuk berbagai kerja pengontrolan yang diatur oleh software yang ada
dalam MC tersebut.
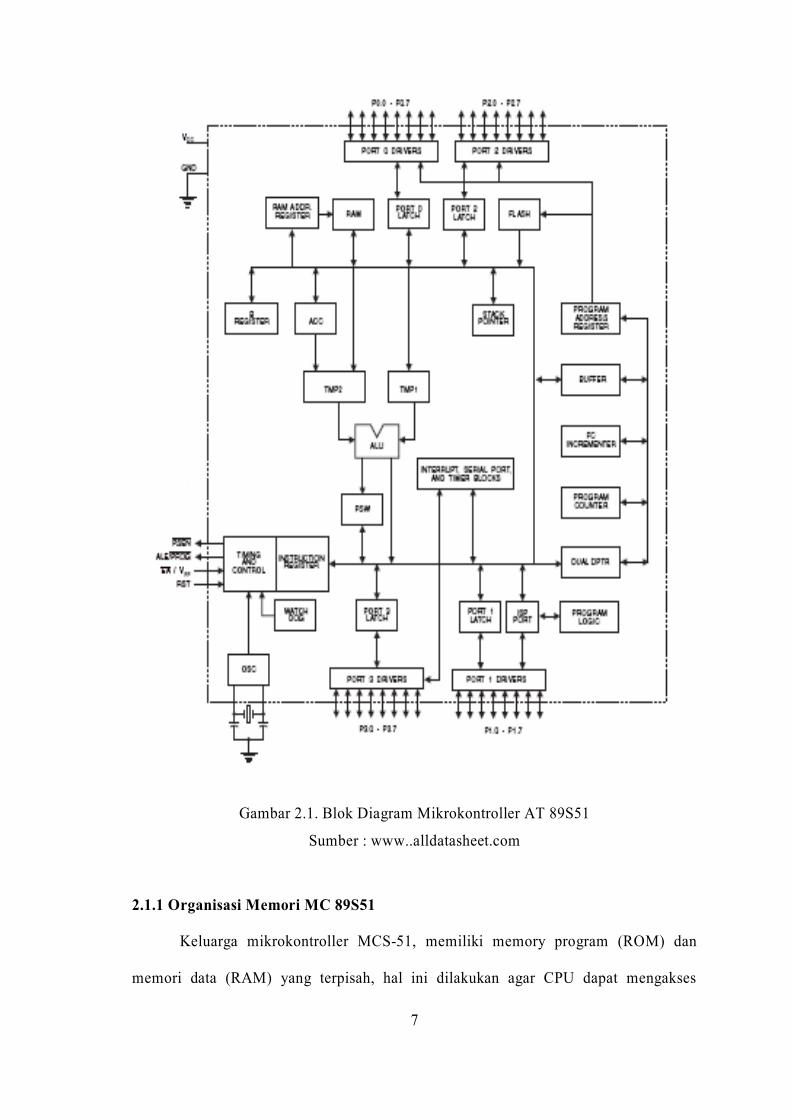
Dengan keistimewaan diatas, pembuatan alat menggunakan mikrokontroller
89S51 menjadi lebih sederhana. Boleh dikatakan mikrokontroller 89S51 ini mempunyai
keistirnewaan dari segi perangkat keras. Adapun blok diagram dari mikrokontroller
89S51 diperlihatkan pada gambar 2.1
7
Gambar 2.1. Blok Diagram Mikrokontroller AT 89S51
Sumber : www..alldatasheet.com
2.1.1 Organisasi Memori MC 89S51
Keluarga mikrokontroller MCS-51, memiliki memory program (ROM) dan
memori data (RAM) yang terpisah, hal ini dilakukan agar CPU dapat mengakses
8
memori program sampai 64 Kbyte dan memori data sampai 64 Kbyte. Lebar memori
data internal adalah 8 bit dan I6 bit (register DPTR).
2.1.2. Memori Program
Memori program menggunakan alamat sepanjang 64 Kbyte, 4 Kbyte untuk
alamat $0000 sampai $OFFF yang merupakan memori internal, dan 60 Kbyte
merupakan memori eksternal. Memori program merupakan tempat penyimpanan data
yang permanen. Memori program merupakan memori yang hanya dapat dibaca dan
dikenal dengan nama ROM (Read Only Memori). Data dalam ROM tidak akan terhapus
meskipun catu daya dimatikan karena ROM bersifat non volatile, sehingga karena
sifatnya yang demikian maka ROM hanya digunakan untuk menyimpan program.
Ada beberapa type ROM yaitu ROM murni merupakan memori yang telah
diprogram oleh pabrik, PROM merupakan memori yang diprogram oleh pemakai tetapi
tidak dapat diprogram ulang, EPROM merupakan memori program yang dapat
diprogram ulang. Jenis ROM yang terdapat didalam mikrokontroller 89S51 yaitu jenis
EPROM. Adapun EPROM pada prinsipnya sama dengan EEPROM perbedaannya
terletak pada pengisian dan penghapusan program. Pada EPROM penghapusan program
harus terlebih dahulu dengan sinar ultra violet, sedangkan pada EEPROM pengisian
dapat dilakukan secara langsung dengan menumpuki program yang lama dengan yang
baru.
2.1.3. Memori Data
Memori data lebih dikenal dengan nama RAM (Random Acces Memori) yaitu
mernori yang dapat dibaca atau ditulisi. Data dalam RAM akan terhapus bila satu daya
dimatikan karena RAM bersifat volatile. Oleh karna sifat RAM yang volatile ini maka

9
pogram mikrokontroller tidak disimpan dalam RAM. RAM hanya digunakan untuk
menyimpan data sementara yaitu data yang tidak begitu vital bila hilang akibat aliran
daya terputus.
Ada dua teknologi yang dipakai untuk membuat RAM yaitu RAM statik dan
RAM dinamik. Dalam RAM statik satu bit informasi disimpan dalam sebuah flip-flop
sehingga RAM statik tidak memerlukan penyegar dan penangannannya juga tidak
terlalu rumit, isi RAM tetap tersimpan selama daya diberikan. Sedangkan RAM
dinamik menyimpari bit informasi sebagai muatan. Sel elementer dibuat dari kapasitansi
gerbang substrat transistor MOS. Keuntungan RAM dinamic adalah sel-sel memori yang
lebih kecil sehingga memerlukan tempat yang lebih sempit dan kapasitas dinamik
menjadi lebih besar dibandingkan dengan RAM statik.
Memori data pada keluarga MCS-51 dapat memiliki pengalamatan sampai 64
Kbyte yang didapat dari memory data eksternal. Selain dari eksternal, MC 89S51
mempunyai 128 byte RAM internal ditambah sejumlah register fungsi khusus atau
Sfecial Function Rregister SFR. Pada keluarga mikrokontroller 89S51, ruang memory
data internal terbagi menjadi blok yang disebut sebagai lower 128, upper 128 dan ruang
SFR sebagaimana yang ditunjukkan pada gambar berikut:
Gambar 2.2. Memori Data Internal
Sumber : Atmel National Semiconduktor
Pada lower 128 lokasi memory terbagi menjadi 3 bagian yaitu:
1. Register Bank 0-3

10
Lokasi register bank dimulai dari alamat OOH - IFH yank terdiri dari 32 byte.
Register bank ini terdiri dari 4 buah register 8 bit yang dapat dipilih melalui
pengaturan program status word register (SWR).
2. Bit Addressable Area
Terdiri dari 16 byte dimulai dari 20H - 2FH. Masing-masing dari 128 bit lokasi ini
dapat dialamati secara langsung yaitu dari $OOH hingga S7FN.
3. Scratch Pad Area
Lokasi dari alamat $30H sampai $7F atau sebanyak 80 byte yang dapat diguakan
sebagai data bagi RAM.
Berikut ini adalah gambar dari lower 128 byte lokasi RAM
Gambar 2.3. Bagian Bawah 128 byte RAM internal
Sumber : Atmel National Semiconduktor
Sedangkan pada 128 byte atas (upper 128) ditempati oleh suatu register yang
memiliki fungsi khusus yang disebut dengan Specialisasi Function Register (SFR) yaitu
sebuah register yang berfungsi khusus, misalnya sebagai latch port, timer, kontrol
periperial dan scbagainya. Pada alamat 80H - FFH merupakan ruang dari special

11
Function register. Pada register ini terdapat alamat vektor dari register yang dimiliki
oleh mikrokontroller. Berikut ini adalah isi dari vektor alamat SFR :
Accumulator (ACC) atau register A dan register B
Kedua register tersebut digunakan untuk operasi perkalian dan pembagian.
Program Status Word (PSW)
Register ini meliputi bit-bit :
- CY carry flag digunakan pada operasi aritmatik, jump, rotate dan intruksi
boolean
- AC : Aulilliary Carry Flag digunakan untuk operasi BCD aritmatik
- FO : digunakan oleh pemprograman untuk menyimpan data I bit RS I dan RS 0
digunakan untuk pemilihan register bank
- OV : overflow flag digunakan pada operasi aritmatik
- P : Parity Flag menunjukkan parity dari register A dimana I parity ganjil dan U
parity genap.
SP (Stack Pointer)
Adalah register 8 bit digunakan untuk menunjukkan alamat dari byte terakhir
yang dimasukkan ke stack. Ketika data diletakkan di stack. SP akan naik sebelum
terjadi penyimpanan data dan pengambilan data dari lokasi stack, SP akan turun
setelah data dibaca dari stack. Register ini berguna apabila digunakan suatu otile
pada program utama.
Data Pointer High (DPH) dan Data Pointer Low (DPL)
DPTR adalah suatu register yang digunakan untuk pengalamatan tidak
langsung. Register ini digunakan untuk mengakses memori program baik internal
atau eksternal juga digunakan untuk alamat eksternal data. DPTR dikontrol 2 buah
register 8 bit yaitu DPH dan DPL.
12
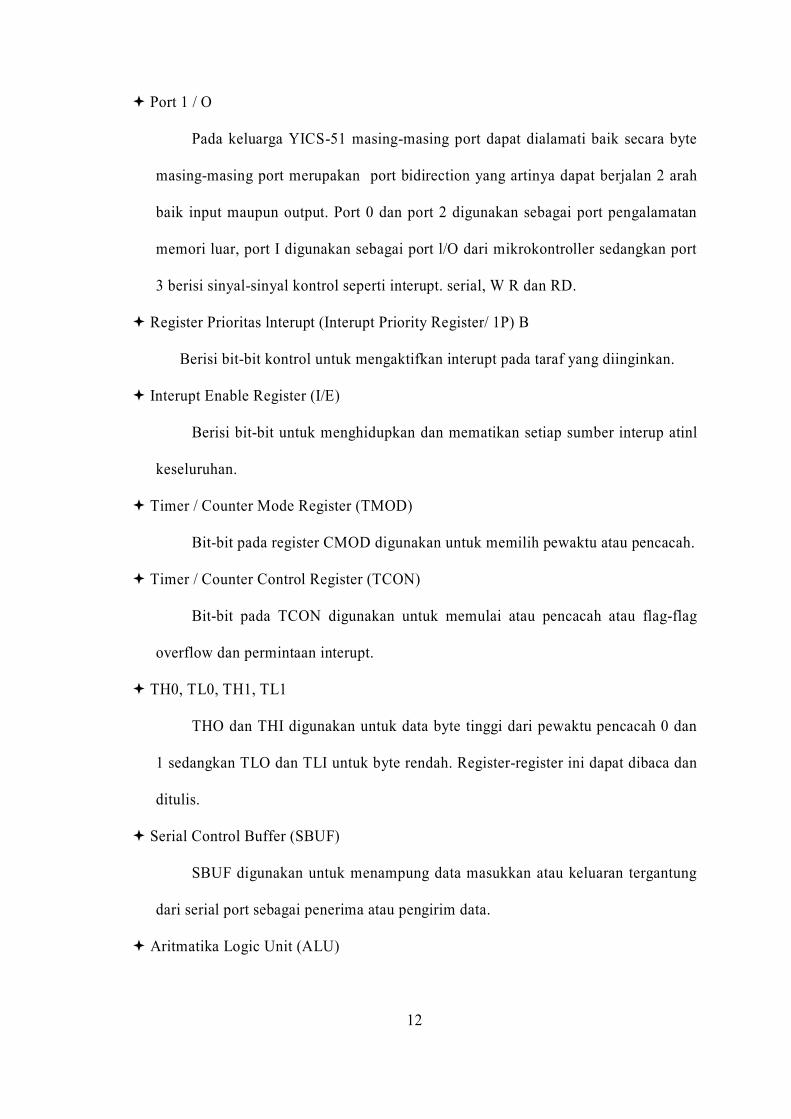
Port 1 / O
Pada keluarga YICS-51 masing-masing port dapat dialamati baik secara byte
masing-masing port merupakan port bidirection yang artinya dapat berjalan 2 arah
baik input maupun output. Port 0 dan port 2 digunakan sebagai port pengalamatan
memori luar, port I digunakan sebagai port l/O dari mikrokontroller sedangkan port
3 berisi sinyal-sinyal kontrol seperti interupt. serial, W R dan RD.
Register Prioritas lnterupt (Interupt Priority Register/ 1P) B
Berisi bit-bit kontrol untuk mengaktifkan interupt pada taraf yang diinginkan.
Interupt Enable Register (I/E)
Berisi bit-bit untuk menghidupkan dan mematikan setiap sumber interup atinl
keseluruhan.
Timer / Counter Mode Register (TMOD)
Bit-bit pada register CMOD digunakan untuk memilih pewaktu atau pencacah.
Timer / Counter Control Register (TCON)
Bit-bit pada TCON digunakan untuk memulai atau pencacah atau flag-flag
overflow dan permintaan interupt.
TH0, TL0, TH1, TL1
THO dan THI digunakan untuk data byte tinggi dari pewaktu pencacah 0 dan
1 sedangkan TLO dan TLI untuk byte rendah. Register-register ini dapat dibaca dan
ditulis.
Serial Control Buffer (SBUF)
SBUF digunakan untuk menampung data masukkan atau keluaran tergantung
dari serial port sebagai penerima atau pengirim data.
Aritmatika Logic Unit (ALU)
13
ALU dapat melakukan operasi-operasi aritmatika, fungsi lugika dan variabel 8
bit seperti penambahan, pengurangan, perkalian, pembagian dan juga operasi-
operasi logika AND, OR, serta fungsi-fungsi lain seperti rotate, clear, complement
dan lain-lain. ALU dengan kemampuan yang tinggi ini memungkinkan 89S51 dapat
melakukan operasi kontrol secara cepat dan algoritma data yang intensif. Operasi--
operasi terpisah sebanyak 51 buah memudahkan dalam memanipulasi 3 type dasar
yaitu Boolean, byte dan word. Ada 11 mode pergalamatan yaitu 7 sebagai data dan
4 sebagai kontrol urutan program. Operasi-operasi pada urnumnya rnembolehkan
beberapa mode pengalarnatan.
Rangkaian Oscilator
Mikrokontroller 89S51 memiliki osilator internal (on chip oscilator) yang
dapat digunakan sebagai sumber clock sebagai CPU. Rangkaian osilator yang
terdapat didalam adalah rangkaian paralel resonan dengan batas frekwensi mulai
dari 3 Mhz sampai dengan 12 Mhz. Berikut adalah tabel pembagian alamat pada
register fungsi-fungsi khusus.

14
Tabel 2.1. Special Function Register
SIMBOL NAMA ADDRESS
ACC
B
PSW
SP
DPTR
DPL
DPH
P0
P1
P2
P3
IP
IE
TMOD
TCON
T2CON
TH0
TL0
TH1
TL1
TH2
ACCUMULATOR
B REGISTER
PROGRAM STATUS WORD
STACK POINTER
DATA POINTER 2 BYTE
LOW BYTE
HIGH BYTE
PORT0
PORT1
PORT2
PORT3
INTERUPT PRIORITY CONTROL
INTERUPT ENABLE CONTROL
TIMER/COUNTER MODE CONTROL
TIMER/COUNTER CONTROL
TIMER/COUNTER 2 CONTROL
TIMER/COUNTER 0 HIGH CONTROL
TIMER/COUNTER 0 LOW CONTROL
TIMER/COUNTER 1 HIGH CONTROL
TIMER/COUNTER 1 LOW CONTROL
TIMER/COUNTER 2 HIGH CONTROL
0E0H
0F0H
0D0H
81H
82H
83H
80H
90H
0A0H
080H
0B8H
0ABH
89H
88H
0C0H
8CH
8DH
8BH
0CDH
0CCH
Sumber : Atmel National Semiconduktor
2.1.4. Sistem Interupsi
Pada mikrokontrollcr 89S51 terdapat beberapa saluran interupsi. Interupsi pada
89S5I dibedakan menjadi 2 jenis yaitu :
1. Interupsi yang tidak dapat dihalangi oleh perangkat lunak (non maskable interupt)
misalnya : reset.
2. Interupsi yang dapat dihalangi perangkat lunak (maskable interupt), contoh
interupsi jenis ini adalah INT 0 dan INT I (eksternal), serta Timer/counter 0,
Timer/counter 1, dan interupsi dari port serial (internal).

15
Tiap sumber interupsi mempunyai alamat yang diawali pada 0003H dan
seterusnya dengan selang 8 byte. Alamat awal dari tiap-tiap permintaan interupsi ini
terdapat pada label 2.2 dibawah ini
Tabel 2.2. Alamat Layanan Sistem Interupsi
Sumber : Atmel National Semiconduktor
Ada dua buah register yang mengontrol interupsi yaitu IE (Interupt Enable)
dan IP (Interupt Priority). Bit-bit pada register IE adalah sebagai berikut:
EA (1E.7) : melumpuhkan semua interupsi, jika EA = 0 tidak ada
interupsi yang dilayani, jika EA = I setup sumber interupsi dapat dijalankan
ES (IE.4) : untuk interupsi port serial
ET1 (IE.3) : untuk interupsi pewaktu/pencacah I
EXI (IE.2) : untuk interupsi luar I
ETO (IE:1) : untuk interupsi pewaktu/pencacah 0
EXO (IE,O): untuk interupsi luar 0
Pengaturan prioritas dari interupsi request terdapat pada register IP (interupt
priority). Bit-bit pada register IP adalah sebagai berikut :
SUMBER INTERUPSI ALAMAT AWAL
Interupsi luar 0 (INT 0) 3(0003H)
Pewaktu / Pencacah 0 (TO) 11(000BH)
Interupsi luar I (INT I) 19(0013H)
Pewaktu / pencacah I (T 1) 27(001 BH)
Port serial 35(0023H)
16
PS (IPA) : untuk prioritas serial port
PTI (IP.3) : untuk prioritas pewaktu
PX1 (IP.2) : untuk interupsi INTO
PTO (IP.1) : untuk prioritas interupsi timer 0
PXO (IP,O): untuk prioritas interupsi INTO
2.1.5. Susunan Pena-pena MC AT89S51
Penjelasan dari masing-masing pena dari mikrokontroller AT 89S51 adalah
sebagai berikut :
1. Pena I sampai dengan 8 (port I) merupakan port 1/O dua arah dengan pull up
internal yang dapat dipergunakan untuk berbagai keperluan. Port ini juga
menerima byte rendah selama pemprograman EPROM maupun ROM
didalamnya
2. Pena 9 (reset) merupakan masukkan reset (aktif tinggi). Pulsa transisi dari
rendah ketinggi akan mereset AT 89S51, apabila tegangan pada pena ini tetap
pada taraf tinggi maka vpd akan memberikan tegangan catu untuk internal
RAM.
3. Pena 10 sampai 17 (port 3) merupakan 1/O dua arah dengan pull up internal
yang memiliki fungsi khusus yaitu
- RXD (P3.0) : masukkan penerimaan data serial (asynchrnous) atau
sebagai keluaran data (synchrnous).
- TXD (P3. 1) : keluaran pengiriman data untuk anal port atau sebagai
keluaran clock.
- TNT 2 (P3.2) : masukkan interupt 2.
- INT 1 (P3.3) : masukkan interupt 1.
17
- TO (P3.4) : masukkan dari pewaktu / pencacah 0.
- T I (N).5) : masukkan dari pewaktu / pencacah 1.
- WR (P3.6) : sinyal penulisan memori data luar.
- RD (P3.7) : sinyal pemhacaan memori data luar.
4. Pena 18 (X- i al 2) merupakan pena masuk ke rangkaian osilator, sebuah osilator
kristal atau sumber osilator luar dapat digunakan.
5. Pena 19 (X-Tal 1) merupakan pena keluaran ke rangkaian osilator internal. Pena
ini dipakai bila menggunakan osilatur kristal.
6. Pena 20 (ground) dihubungkan ke VSS atau ground.
7. Pena 21 sampai 28 (port 2) merupakan port 1/0 8 byte dua arah dengan pull up
internal, port ini mengirimkan bit alamat apabila dilakukan pengaksesan memori
eksternal.
8. Pena. 29 (PSLN / Program Store lsnabie) merupakan sinyal pengontrol yang,
memperbolehkan program memori eksternal masuk kedalam bus selama proses
pengambilan intruksi.
9. Pena 30 (ALE / Address Latch Enable) digunakan untuk menahan alamat
memori eksternal selama pelaksanaan intruksi.
10. Pena 31 (EA / Eksternal Access) apabila pena ini diberi logika tinggi (H) maka
mikrokontroller akan melaksanakan intruksi dari ROM / EPROM ketika isi
program counter kurang dari 4096. Apabila diberi logika rendah (L)
mikrokontroller akan melaksanakan seluruh intruksi dari memori program luar.
11. Pena 32 sampai 39 ( port 0 ) merupakan port open drain 1/0 8 bit dua arah, port
ini digunakan sebagai multipleks (data secara bergantian) bus alamat rendah
selama pcngaksesan program cksternal dan bus data selama pengaksesan ke
18
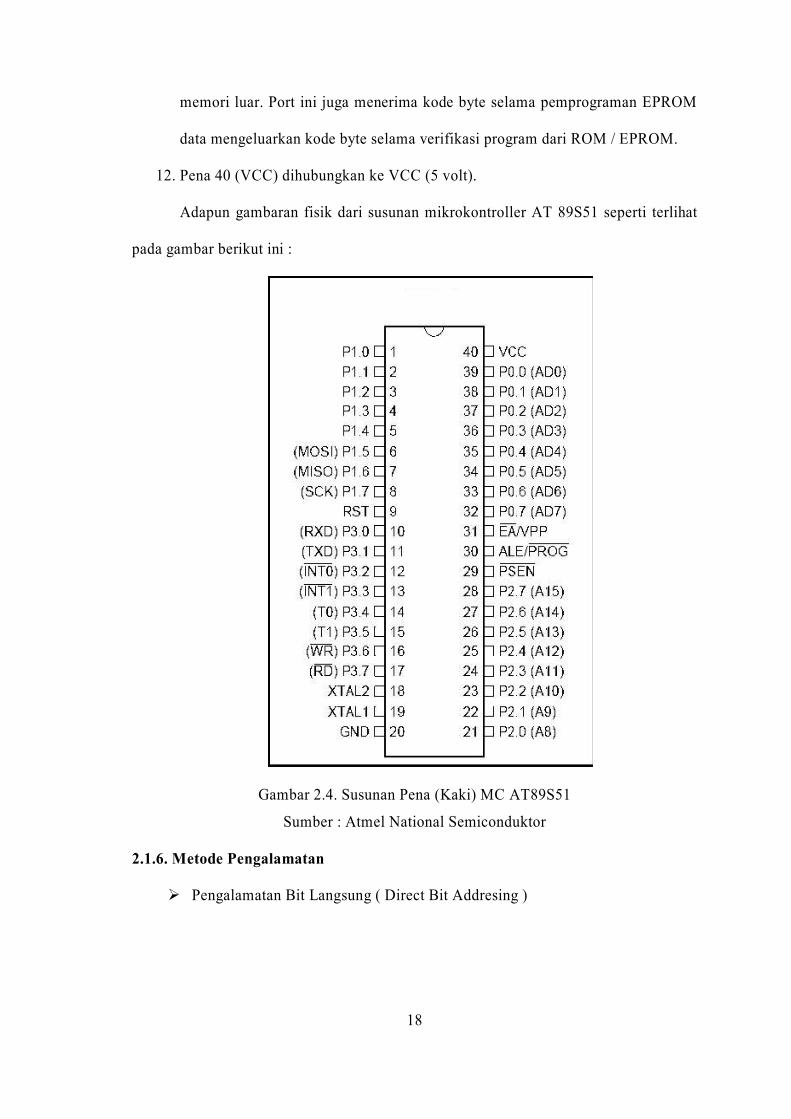
memori luar. Port ini juga menerima kode byte selama pemprograman EPROM
data mengeluarkan kode byte selama verifikasi program dari ROM / EPROM.
12. Pena 40 (VCC) dihubungkan ke VCC (5 volt).
Adapun gambaran fisik dari susunan mikrokontroller AT 89S51 seperti terlihat
pada gambar berikut ini :
Gambar 2.4. Susunan Pena (Kaki) MC AT89S51
Sumber : Atmel National Semiconduktor
2.1.6. Metode Pengalamatan
Pengalamatan Bit Langsung ( Direct Bit Addresing )

19
Pengalamatan langsung bit ini hanya pada lokasi RAM internal yaitu
20H - @FH dan sebagian SFR yaitu, port 1, port 2, port 3, TCON register,
SCON register, IE register, PSW register, ACC dan B register.
Pengalamatan Tak Langsung
Pada pengalamatan tak langsung, instruksi menunjukkan suatu register
yangn isinya adalah alamat dari operand. Eksternal dan Internal RAM dapat
dialamati secara tidak langsung. Register alamat untuk memilih bank register
atau stack pointer. Register alamat untuk data dengan lebar 16 bit digunakan
data pointer DPTR.
Pengalamatan Berindeks
Yang dapat diakses dengan pengalamatan berindeks hanya memory
program. Mode ini dimaksudkan untuk membaca loop-up table program.
Konstanta Immediate
Pengalamatan lanmgsung dilakukan dengan memberikan nilai ke suatu
register secara langsung, dilakukan dengan menggunakn tanda#.
Contoh : Mov A #100
2.2. Bahasa Assembler
Komputer hanya dapat “mengerti dan mengartikan” bahasa mesin. Bahasa mesin
berbentuk 0 dan 1 (binary), sehingga sangat sukar untuk dituliskan oleh seorang
programmer. Bahasa assembler merupakan bahasa programming symbolic yang dapat
dipakai untuk membuat kode-kode mesin dalam binary. Bahasa assembler digunakan
oleh seorang programmer jika :

20
a. Diperlukan kontrol yang ketat dari program yang dibuatnya, sampai
ketingkat byte maupun bit.
b. Diperlukan subroutine-subroutine bagi fungsi-fungsi yang tidak dapat
diberikan oleh bahasa pemrograman yang lain.
2.3. Motor DC
Motor DC adalah peralatan elektromekanis yang mengubah daya listrik menjadi
daya mekanis dengan sumber arus sebagai supply energi listriknya. Pada umumnya
motor DC terdiri dari atas bagian yang diam dan bagian yang bergerak. Bagian yang
diam biasa disebut stator dan bagian yang bergerak disebut rotor. Stator adalah
kumparan medan yang berbentuk kutub sepatu untuk menghasilkan medan magnet.
Rotor merupakan kumparan jangkar dengan belitan konduktor (kumpraran) untuk
mengimbaskan ggl (gaya gerak listrik) pada konduktor yang terletak pada alur-alur
jangkar. Celah udara memungkinkan berputarnya jangkar dalam medan magnet.
Pada stator dililitkan gulungan kawat untuk kumparan medan. Arus yang
mengalir pada kumparan ini disebut arus medan (ie) yang pada rangkaian motor DC
menghasilkan fluks magnet utama (Φe) pada stator dan rotor. Kumparan jangkar adalah
lilitan yang digulungkan secara aksial pada besi rotor dan dihubungkan ke batang-
batang komutator. Kumparan ini lewati listrik melewati sikat-sikat dan komutator
tersebut. Arus yang mengalir dalam kumparan ini dinamakan arus jangkar (ia). Arus ini
menghasilkan ggl (gaya gerak listrik) yang memiliki arah tegak lurus terhadap fluks
magnet utama yang ditimbulkan oleh arus pada kumparan stator.
Motor DC dibedakan menjadi 3 yaitu :
1. Motor Shunt
21
2. Motor Seri
3. Motor Kompon
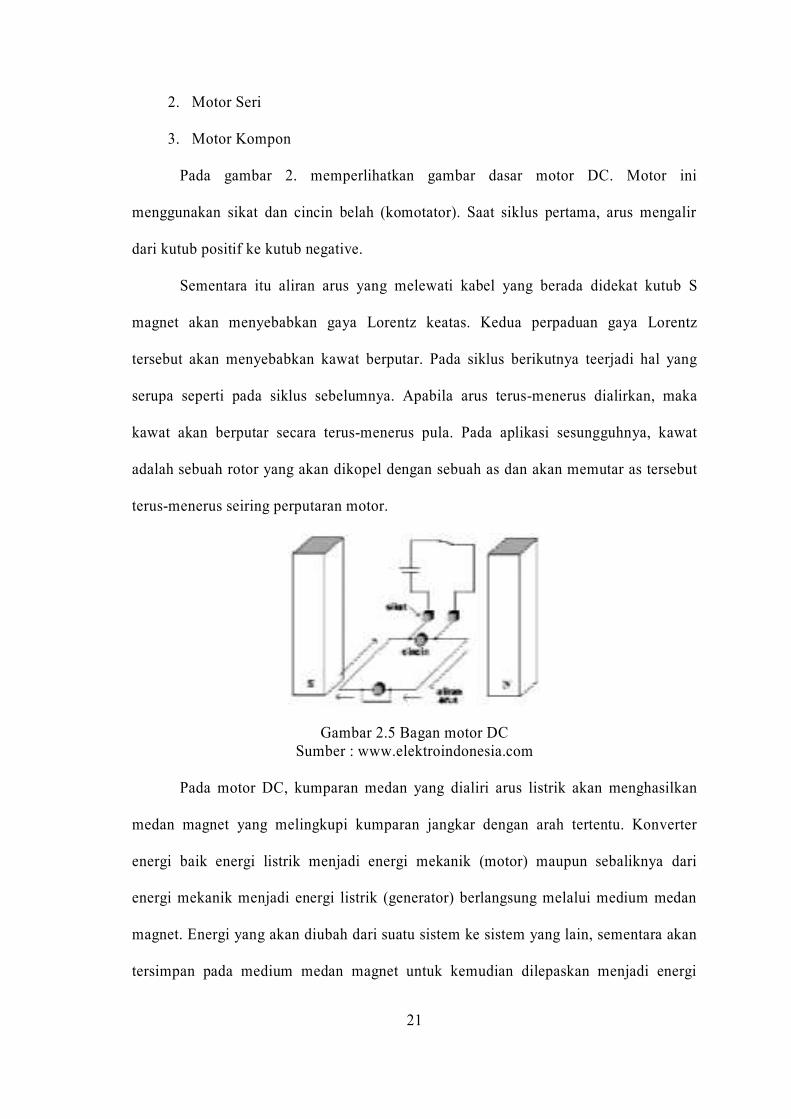
Pada gambar 2. memperlihatkan gambar dasar motor DC. Motor ini
menggunakan sikat dan cincin belah (komotator). Saat siklus pertama, arus mengalir
dari kutub positif ke kutub negative.
Sementara itu aliran arus yang melewati kabel yang berada didekat kutub S
magnet akan menyebabkan gaya Lorentz keatas. Kedua perpaduan gaya Lorentz
tersebut akan menyebabkan kawat berputar. Pada siklus berikutnya teerjadi hal yang
serupa seperti pada siklus sebelumnya. Apabila arus terus-menerus dialirkan, maka
kawat akan berputar secara terus-menerus pula. Pada aplikasi sesungguhnya, kawat
adalah sebuah rotor yang akan dikopel dengan sebuah as dan akan memutar as tersebut
terus-menerus seiring perputaran motor.
Gambar 2.5 Bagan motor DC
Sumber : www.elektroindonesia.com
Pada motor DC, kumparan medan yang dialiri arus listrik akan menghasilkan
medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konverter
energi baik energi listrik menjadi energi mekanik (motor) maupun sebaliknya dari
energi mekanik menjadi energi listrik (generator) berlangsung melalui medium medan
magnet. Energi yang akan diubah dari suatu sistem ke sistem yang lain, sementara akan
tersimpan pada medium medan magnet untuk kemudian dilepaskan menjadi energi

22
sistem lainnya. Dengan demikian, medan magnet disini selain berfungsi sebagi tempat
penyimpanan energi juga sekaligus proses perubahan energi, dimana proses perubahan
energi pada motor arus searah dapat digambarkan pada gambar 2.6.
Energi Listrik Medan Magnet Energi Mekanik
Gambar 2.6 Proses Konversi Energi Pada Motor DC`
Sumber : www.elektroindonesia.com
2.3.1. Prinsip Kerja Motor DC
Prinsip kerja motor DC berdasarkan pada penghantar yang dialiri arus
ditempatkan dalam suatu medan magnet penghantar tersebut akan mengalami suatu
gaya. Gaya tersebut akan menimbulkan torsi yang akan menimbulkan rotasi mekanik
sehingga motor akan berputar. Motor DC ini akan menerima sumber arus searah dari
jala-jala kemudian diubah menjadi energi mekanik berupa putaran yang akan digunakan
oleh peralatan yang lain. Ada tiga hal pokok dari prinsip kerja motor DC antara lain:
o Adanya garis-garis gaya magnet (fluks) antar kutub-kutub yang berada dalam
stator.
o Penghantar yang dilalui arus listrik ditempatkan pada jangkar yang berada dalam
medan magnet.
o Pada penghantar timbul gaya yang menghasilkan torsi.
Apabila kawat melingkar tersebut dialiri arus listrik dengan arah tertentu maka
disumbu pusat lingkaran akan muncul medan magnet dengan arah tertentu. Arah medan
magnet ini ditentukan dengan kaidah tangan kanan.
Dengan aturan sebagai berikut:
23
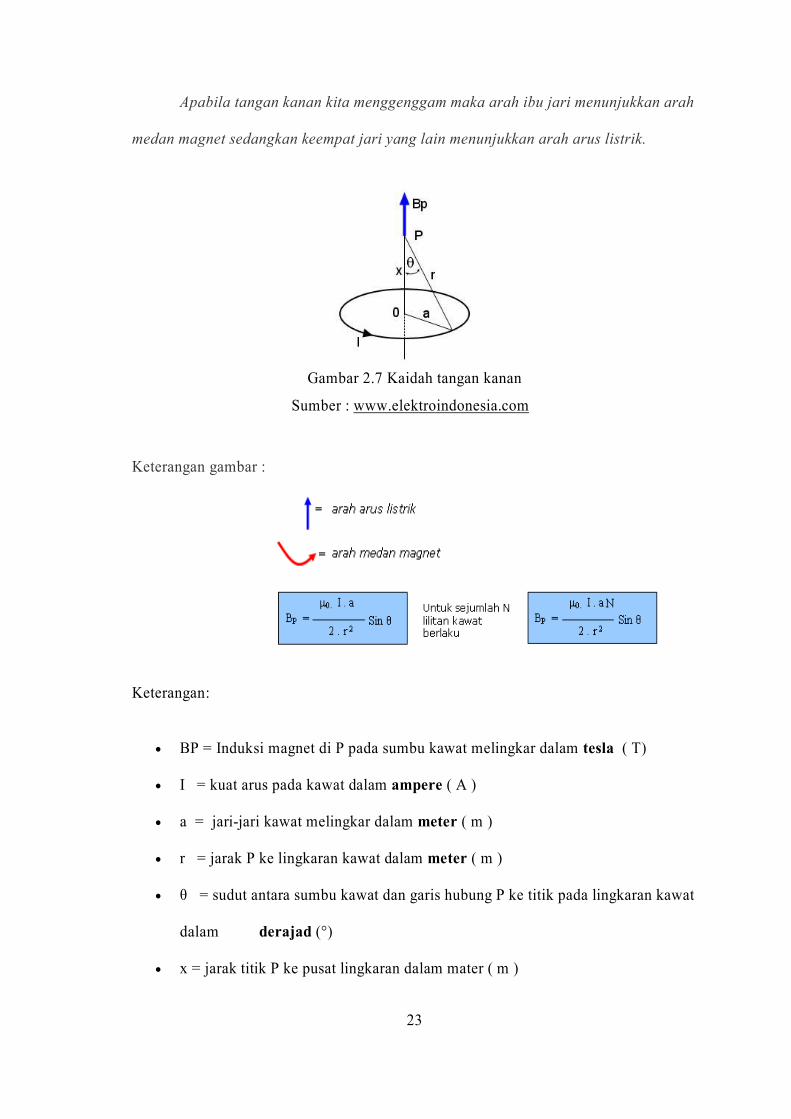
Apabila tangan kanan kita menggenggam maka arah ibu jari menunjukkan arah
medan magnet sedangkan keempat jari yang lain menunjukkan arah arus listrik.
Gambar 2.7 Kaidah tangan kanan
Sumber : www.elektroindonesia.com
Keterangan gambar :
Keterangan:
BP = Induksi magnet di P pada sumbu kawat melingkar dalam tesla ( T)
I = kuat arus pada kawat dalam ampere ( A )
a = jari-jari kawat melingkar dalam meter ( m )
r = jarak P ke lingkaran kawat dalam meter ( m )
θ = sudut antara sumbu kawat dan garis hubung P ke titik pada lingkaran kawat
dalam derajad (°)
x = jarak titik P ke pusat lingkaran dalam mater ( m )

24
dimana :
2.3.2. Rumus Dasar Motor DC
Berdasarkan teori elektromagnetik, dapat diturunkan 3 rumus dasar untuk mesin
arus searah ini adalah:
o Tegangan induksi
..nCEa volt
o Kecepatan
Rumus kecepatan ini sebenarnya diturunkan dari rumus tegangan induksi dan
merupakan kecepatan motor tanpa beban:
.C
Ean
Keterangan:
Ф = fluks/kutub
n = putaran (rpm)
C = (p/a) x (Z/60) = konstanta
P = jumlah kutub
a = jalur parallel konduktor jangkar
Z = jumlah konduktor jangkar
Ia = arus jangkar
2.4 Pneumatik (Sistem Tekanan Udara)
Pneumatik merupakan teori atau pengetahuan tentang udara yangf bergerak,
kedaan-keadaan keseimbangan udara dan syarat-syarat keseimbangan. Perkataan
pneumatic berasal dari bahasa Yunani “pneuma” yang berarti “napas” atau “udara”. Jadi
pneumatic berarti terisi udara atau digerakan oleh udara mampat. Pneumatik

25
merupakan cabang teori aliran atau mekanika fluida dan tidak hanya meliputi penelitian
aliran-aliran udara melalui suatu system saluran, yang terdiri atas pipa-pipa, selang-
selang, gawai dan sebagainya, tetapi njuga aksi dan penggunaan udara mampat.
Pneumatik menggunakan hokum-hukum aerodinamika, yang menentukan keadaan
keseimbangan gas dan uap (khususnya udara atmosfir) dengan adanya gaya-gaya luar
(aerostatika) dan teori aliran (aerodinamika).
Pneumatik dalam pelaksanaan teknik udara mampat dalam industri merupakan
ilmu pengetahuan dari semua proses mekanik dimana udara memindahkan suatu gaya
atau gerakan. Jadi pneumatic meliputi semua komponen mesin atau peralatan, dalam
mana terjadi proses-proses pneumatic. Dalam bidang kejuruan teknik pneumatic dalam
pengertian yang lebih sempit lagi adalah teknik udara mampat (udara bertekanan).
Susunan system pneumatic adalah sebagai berikut :
a. Catu daya (energi supply)
b. Elemen masukan (sensor)
c. Elemen pengolah (processor)
d. Elemen kerja (actuators)
2.4.1 Sumber Tenaga Pneumatik
Pemampat digunakan untuk membekalkan tenaga kepada sistem pneumatik.
Sistem pneumatik biasanya memerlukan aliran udara termampat dari 40 l/min sehingga
20,000 l/min hantaran udara bebas piawai pada tekanan atmosfera 1.013 bar (mutlak)
pada suhu sekitar 20oC yang telah dimampatkan oleh pemampat dan disimpan di dalam
penerima. Dua jenis pemampat yang digunakan dalam industri;
- pemampat salingan

26
- pemampat putaran
Pemampat boleh membekalkan udara termampat dengan kapasiti tekanan yang
tinggi begitu juga dengan penerima, namun sistem pneumatik hanya memerlukan
tekanan kerja yang lebih kecil oleh itu pengatur diperlukan. Pengatur tekanan akan
melaraskan tekanan udara termampat ke satu nilai tekanan yang diperlukan.
2.5 Bahan Material
Dalam pembuatan batako dibutuhkan bahan-bahan material, diantaranya :
- Pasir
- Semen
- Air
Di sini pencampuran antara pasir, semen dan air harus seimbang untuk
menghasilkan batako yang baik sesuai yang diinginkan. Adapun perbandingan antara
pasir dan semen dibuat 6:1 , yaitu pasir 6 gelas (air minum kemasan) dan semen 1 gelas
(air minum kemasan). Setelah bahan material berupa pasir dan semen diaduk rata,
kemudian pencampuran antara pasir dan semen tadi diberi air kurang lebih 150 cc
(untuk setiap takaran pasir dan semen 6:1) atau secukupnya, sehingga pada waktu
pengepresan pada alat pengepres tidak terlalu basah yang mengakibatkan air dari
campuran meluber dan hasil akan kurang baik atau terlalu kering yang mengakibatkan
bahan material tersebut tidak bisa menyati dengan baik sesuai dengan yang diharapkan.
Penggunaan pasir disini dianjurkan pasir yang bertekstur kasar (pasir kasar) agar hasil
dari pencetakan dapat maksimal. Sedangkan semen yang digunakan adalah semen hitam
pada umumnya.

27
BAB III
PERENCANAAN DAN PEMBUATAN ALAT
3.1 Diagram Blok dan Prinsip Kerja Alat
Mikrokontroller
AT89S51
Driver
Driver
Selenoid
Valve
Selenoid
Valve
DriverMotor
DC
SW 1
SW 2
SW 3
SW 4
Buffer
Display
7Segment
Air Cilinder
Cetakan
Air Cilinder
Press
Limit Sw itch Papan Cetakan
Limit Sw itch Press
Tombol Start
Tombol Stop
Gambar 3.1 Diagram Blok Sistem Pencetak Batako/Paving
Perangkat keras pada bab ini berupa rangkaian Driver, Buffer, Display dan
rangkaian minimum system mikrokontroler AT89S51. Proses pencetakan batako
dilakukan secara otomatis oleh mekanik penggerak. Secara garis besar prinsip kerja alat
yang dirancang adalah sebagai berikut :
Posisi awal alat pada saat dihidupkan, mikrokontroller akan mengangkat
penekan/press. Setelah penekan/press sudah dalam posisi diatas maka cetakan
akan diangkat juga pada posisi diatas. Jika penekan/press dan cetakan sudah
pada posisi diatas, maka alat dalam kondisi siap mencetak.
Berikutnya papan cetakan didorong kedalam mesin cetakan sehingga menyentuh
limit switch, maka limit switch akan memberikan sinyal yang berupa logic pada
mikrokontroler, setelah itu mikrokontroller akan menggerakkan cetakan turun
28
kebawah. Setelah itu baru dilakukan pengisian material yaitu pasir dan semen
yang sudah diaduk dengan takaran yang sudah ditentukan.
Setelah cetakan sudah terisi material pasir dan semen maka dilakukan proses
pencetakan, yaitu dengan menekan tombol Start. Jika tombol Start ditekan maka
mikrokontroller akan menggerakkan Motor DC untuk melakukan proses
perataan material dengan metode vibrasi atau penggetaran. Proses pemerataan
material dilakukan kurang lebih 5 detik. Setelah pemerataan material selesai
maka mikro akan menggerakkan penekan/press untuk melakukan pemadatan.
Pada saat material didalam cetakan di tekan, maka pressure switch akan
bergerak mengaktifkan switch yang menandakan tekanan yang diberikan sudah
cukup. Sehingga mikro akan menarik kembali penekan/press pada posisi diatas.
Setelah penekan sudah berada diatas maka cetakan akan ditarik juga pada posisi
atas. Maka cetakan siap diambil dengan cara menarik keluar papan cetakan.
3.2. Perencanaan Hardware
Hardware terdiri dari rangkaian-rangkaian yang tersusun dari komponen –
komponen linear. Rangkaian hardware tersebut terdiri dari :
Minimum Sistem Mikrokontoler 89S51
Rangkaian Clock
Rangkaian Reset
Rangkaian Driver Motor dan Solenoid
Rangkaian Saklar Deteksi
Rangkaian Kontrol
Rangkaian Display

29
3.2.1. Minimum Sistem Mikrokontoler 89S51
Untuk membentuk sebuah minimum system dengan basis mikrokontroler
AT89S51, dibutuhkan perangkat tambahan memori luar yaitu ROM sebagai penyimpan
program dan RAM sebagai memori tambahan. Selain itu, agar minimum sistem ini
dapat dihubungkan dengan peralatan luar maka dibutuhkan interface (antar muka)
sebagai I/O. agar mikrokontroler AT89S51 dapat mengakses perangkat tambahan
tersebut, maka diperlukan decoder sebagai pemeta memori (menentukan alamat masing
– masing perangkat).
Hubungan antar kesemua komponen tersebut untuk lebih jelasnya akan
digambarkan sebagai berikut :
Gambar 3.2. Minimun Sistem Mikrokontroler AT89S51
Sumber : Perancangan
30
3.2.2. Rangkaian Clock
Mikrokontroler AT89S51 memiliki internal clock pada pin 5 (X1) dan pin 4
(X2) yang berfungsi sebagai sumber clock, tetapi masih diperlukan rangkaian tambahan
untuk membangkitkan clock tersebut. Rangkaian clock ini merupakan jantung dari
rangkaian minimum mikrokontroler AT89S51 yang terdapat oscilator sebagai
pembangkit pulsa, mempunyai input XTAL 1 dan output XTAL 2. Dimana XTAL 1
adalah input yang dihubungkan dengan rangkaian osilasi dalam rangkaian
mikrokontroler, sedangkan XTAL 2 adalah output feedback untuk osilasi.
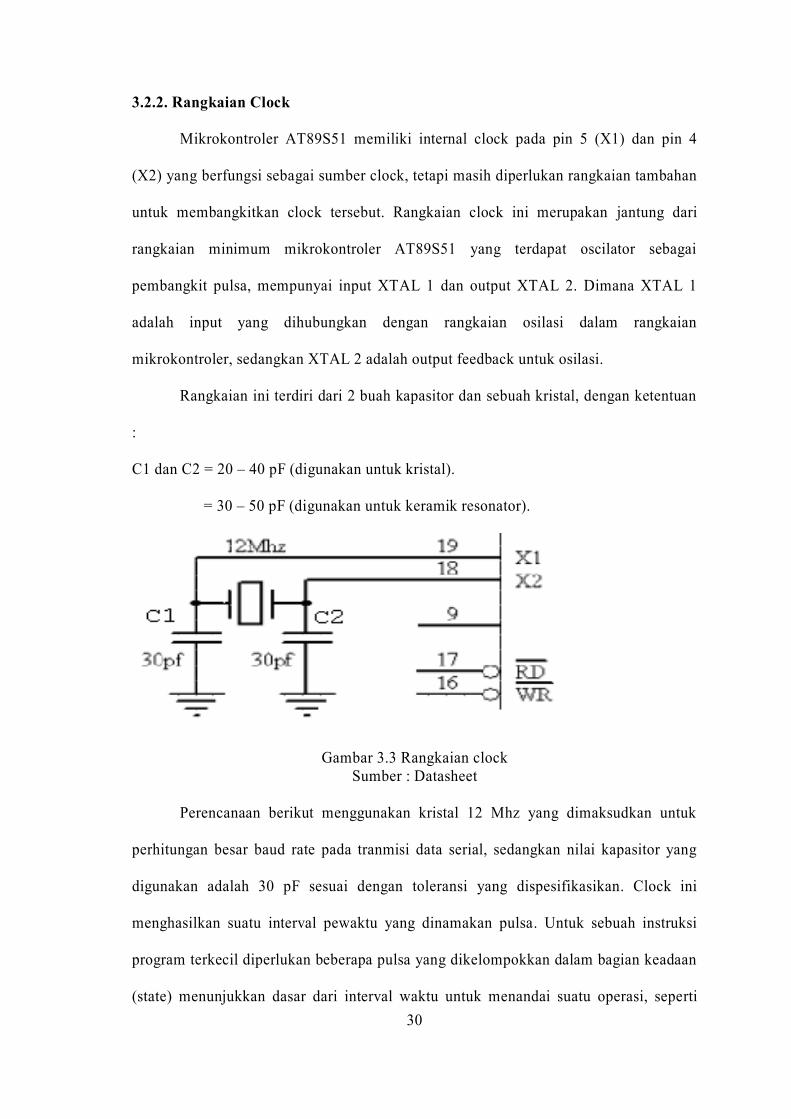
Rangkaian ini terdiri dari 2 buah kapasitor dan sebuah kristal, dengan ketentuan
:
C1 dan C2 = 20 – 40 pF (digunakan untuk kristal).
= 30 – 50 pF (digunakan untuk keramik resonator).
Gambar 3.3 Rangkaian clock
Sumber : Datasheet
Perencanaan berikut menggunakan kristal 12 Mhz yang dimaksudkan untuk
perhitungan besar baud rate pada tranmisi data serial, sedangkan nilai kapasitor yang
digunakan adalah 30 pF sesuai dengan toleransi yang dispesifikasikan. Clock ini
menghasilkan suatu interval pewaktu yang dinamakan pulsa. Untuk sebuah instruksi
program terkecil diperlukan beberapa pulsa yang dikelompokkan dalam bagian keadaan
(state) menunjukkan dasar dari interval waktu untuk menandai suatu operasi, seperti

31
penempatan opcode byte, pengerjaan opcode atau penulisan data byte. Jumlah suatu
byte opcode telah ditentukan oleh pabrik berdasarkan bentuk perintah, misalkan
penggunaan perintah, MOV A, R1, yang mempunyai 1 byte.
3.2.3. Rangkaian Reset
Rangkaian reset disini digunakan untuk mereset mikrokontroler AT89S51, yaitu
mengawali eksekusi program pada alamat paling rendah. Rangkaian ini direncanakan
agar mempunyai kemampuan power on reset, yaitu reset terjadi saat power diaktifkan.
Gambar 3.4 Rangkaian Reset
Sumber : Perancangan
Dengan mengasumsikan lama waktu starup dari oscilasi pada waktu power di on
kan adalah 10 μs dan kristal yang dipakai pada mikrokontroler adalah 12 Mhz, maka
lebar pulsa pada saat rest harus lebih besar dari :
T = sxx
x121010
1012
122 6
6
Tegangan tipikal dikaki reset adalah setengah dari Vcc yaitu 2.5 volt. Untuk
memenuhi kriteria diatas dalam perencanan dipakai nilai R=10 kΩ dan C=10 μF,
sehingga waktu pulsa pada reset adalah :
Treset = 10.103 x 10.10
-6
= 0.1s.

32
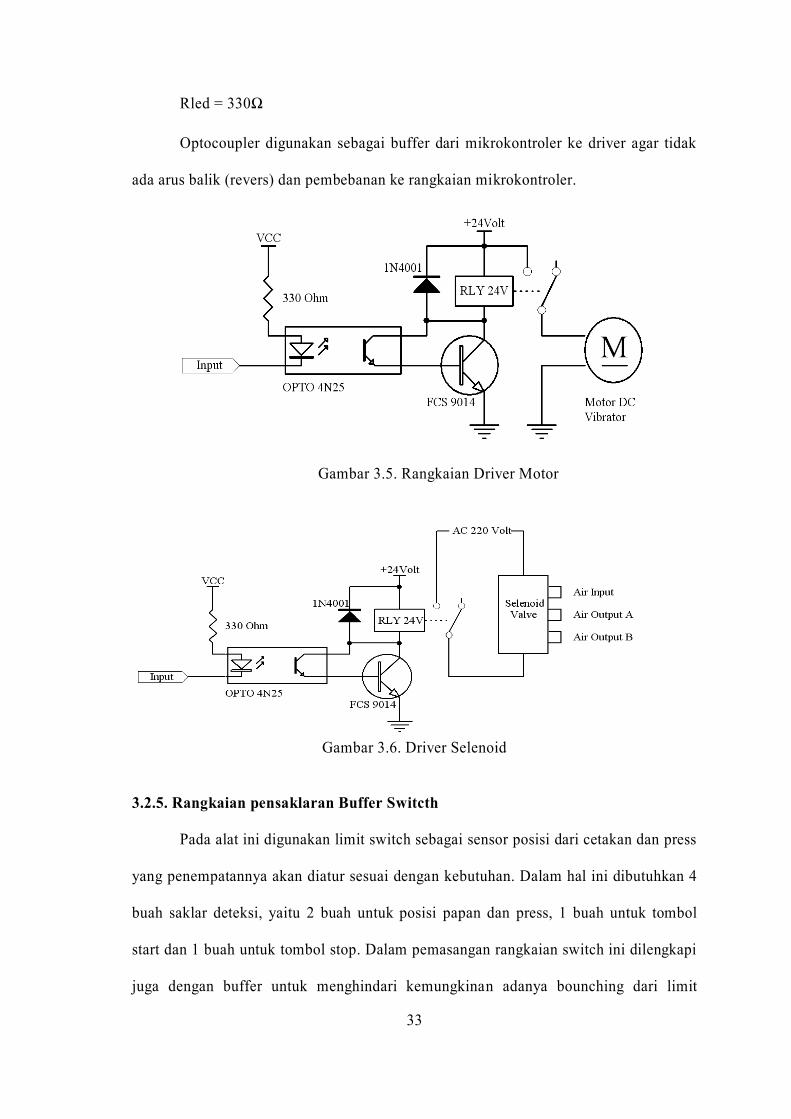
3.2.4. Driver Motor dan Solenoid Valve
Pada alat Pencetak batako terdapat Motor DC yang berputar satu arah saja untuk
menggetarkan (vibrasi) mekanik sebagai proses perataan material di dalam cetakan.
Pada perencanaan pembuatan penggerak atau driver motor DC dan solenoid ini dipilih
beberapa komponen yang mempunyai tegangan yang besar agar motor dan solenoid
dapat bergerak secara maksimal sesuai dengan spesifikasi motor yaitu 24V dan solenoid
pada tegangan AC 220V. Maka dari itu dibuatlah penggerak motor DC dan Solenoid
dengan komponen Relay yang dapat tahan dengan tegangan 24V dengan kontak poin
atau saklar pada tegangan DC 24V dan AC 220V.
Pemilihan relay untuk menggerakkan Motor DC dan Solenoid ini karena relay
merupakan saklar mekanik dan tidak dipengaruhi oleh Vce atau Ib seperti pada
transistor. Untuk mengaktifkan Motor DC pada relay agar dapat berputar diperlukan
transistor yang dapat bekerja terhadap tegangan 24V, maka dipilih transistor FCS 9014
yang terhubung dengan kumparan relay, dengan spesifikasi sebagai berikut:
Motor DC : VDC Max 30V Solenoid Valve : VAC 220V
IDC 2 A
Rpm 2800
Untuk dapat menggerakkan rangkaian ini maka mikrokontroller akan
memberikan logic Low pada Led Optocoupler. Led (Ligh Emiting Dioda) yang berada
pada Optocoupler sama halnya dengan Led-Led pada ummnya. LED mempunyai arus
bias maju (If) sebesar 10mA dan tegangan sebesar 1,5 volt. Supaya Led mampu bekerja
dan tidak putus maka harus ditambahkan tahanan yang dihubungkan secara seri ( Rled).
Rled = Iled
satVceVledVcc )(
Rled = 010.0
2.05.15
33
Rled = 330Ω
Optocoupler digunakan sebagai buffer dari mikrokontroler ke driver agar tidak
ada arus balik (revers) dan pembebanan ke rangkaian mikrokontroler.
Gambar 3.5. Rangkaian Driver Motor
Gambar 3.6. Driver Selenoid
3.2.5. Rangkaian pensaklaran Buffer Switcth
Pada alat ini digunakan limit switch sebagai sensor posisi dari cetakan dan press
yang penempatannya akan diatur sesuai dengan kebutuhan. Dalam hal ini dibutuhkan 4
buah saklar deteksi, yaitu 2 buah untuk posisi papan dan press, 1 buah untuk tombol
start dan 1 buah untuk tombol stop. Dalam pemasangan rangkaian switch ini dilengkapi
juga dengan buffer untuk menghindari kemungkinan adanya bounching dari limit

34
switch tersebut. Dalam perencanaan rangkaian buffer, komponen yang digunakan
adalah gerbang NOT atau IC 74LS04..
Untuk mencari nilai resistor yang sesuai dengan kebutuhan, maka harus
diketahui dahulu karakteristik dari masukan/input mikrokontroler.
Karakteristik Teknis Mikrokontroler :
Vin logic High = 2,0 – 5,0 volt
Iin logic High =650 μA max
(Sumber Datasheet Mikrokontroler AT89S51)
Gambar 3.7. Switching Pensaklaran
Sumber : perancangan

35
3.2.6. Rangkaian Display Seven Segment
Untuk menampilkan angka digunakan seven segmen yang berjenis command
anoda. Dalam perencanaan alat ini menggunakan 2 digit seven segmen yang
menggunakan masukan dari port paralel dengan metode multipleks.
Gambar 3.8. Display 7Segmen
Sumber : perancangan
Pada gambar rangakian di atas menunjukkan untuk menghemat penggunaan bit
port, maka digunakan penghubung IC 74LS47 sebagai pengubah dari kode biner ke
decimal, sehingga yang dibutuhkan hanya 4 bit saluran dari port yang digunakan.
Tegangan catu yang digunakan untuik mensuplay seven segmen 1,7 – 2Volt dan
arus kerja LED seven segmen 5 – 20mA.
Sedangkan dalam perencanaan ILED = 10mA. Pada data book TTL IC 74LS47 tiap
pinnya mempunyai harga-harga keadaan keluaran sebagai berikut :
IOL = 16mA(max) VOL = 0,4Volt(max)

36
Harga-harga diatas menentukan nilai resistor yang digunakan untuk
mengamankan IC 74LS47 dari arus yang mengalir dari Vcc 5 volt.
Rsegmen = VCC – VLED - LED
OL
IV
=mA10
4.07.15
=290 Ω
=330 Ω (harga standart)
Display ini digunakan sebagai tampilan jumlah inputan untuk banyaknya
pencetakan. Pada aplikasi digunakan Tahanan ( R ) beban sebesar 330 Ω karena
merupakan yang tersedia di pasaran.
3.3. Perancangan Software
Software merupakan program yang akan dilakukan oleh MCU untuk
mengendalikan proses kerja alat tersebut. Dan program tersebut akan dimasukkan ke
dalam EEPROM yang akan diakses oleh MC AT89S51 dan akan mengontrol perputaran
motor DC dan pencetakan serta penghitungan hasil proses pencetakan sampai proses
selesai. Software yang digunakan adalah bahasa assembler.
3.3.1. Struktur Dasar Bahasa Assembler
Struktur dasar bahasa assembler menganut satu baris untuk satu perintah seperti
:
Proses: MOV AX,BX ; Menyalin isi register BX kedalam register AX.
Proses adalah bagian label, MOV adalah bagian mnemonic, AX dan BX adalah
bagian operand (AX yang berada di sebelah kiri disebut operand tujuan atau Destination
operand sedangkan BX yang berada disebelah kanan disebut operand sumber atau

37
Source Operand hal ini berlaku untuk semua jenis operand yang lebih dari satu),
sedangkan kalimat yang ada dibelakang tanda ‘;’ adalah bagian komentar.
Bagian mnemonic merupakan singkatan perintah yang mudah diingat, bagian ini
adalah bagian yang menginstruksikan suatu program untuk bekerja sesuai dengan
perintah yang ditulisnya.
Bagian operand adalah bagian yang merupakan objek dari sebuah instruksi atau
bagian yang harus dieksekusi oleh program assembler sesuai dengan perintah dari
bagian mnemonic.
Bagian komentar tidak berpengaruh pada jalannya program assembler, tetapi
sangat penting untuk mempermudah seseorang mengerti maksud dari program yang
dibuatnya sehingga orang tersebut tahu akan guna dari sebuah instruksi.
3.3.2. Cara MengCompile Program Assembler
Untuk mengkompile sebuah program dengan bahasa Assembler diperlukan
sebuah compiler yang disebut TASM.EXE (Turbo Assembler), yang akan membuat
source code dengan file berektensi .ASM yang telah kita isi dengan program dengan
bahasa assembler menjadi sebuah file dengan ekstensi .OBJ. setelah itu file program
berekstensi OBJ akan dikompile lagi ke file berekstensi List, Hex dan Bin. File yang
nantinya akan di isikan kedalam mikrokontroller adalah file program yang ber ekstensi
Hex melalui program Downloader. Dalam pemrograman alat ini menggunakan
programmer Downloader ATMEL ISP seperti dibawah ini.

38
Gambar 3.9 Software Downloader ATMEL MCU ISP

39
3.4. Diagram Alir Sistem Kerja Alat
Mulai
Press Posisi di Atas
Cetakan Posisi di Atas
Counter = 0
Papan di
Masukkan
?
Cetakan di Turunkan
Pengisian Bahan/Material
Tombol
Start
Ditekan
?
Proses Perataan/Vibrator 3 detik
Proses Pemadatan/Press Turun
Pressur
Sw itch
Aktif
?
Press Dinaikkan
Cetakan Dinaikkan
Papan di
Dikeluarkan
?
Counter + 1
Selesai
Y
T
T
Y
Y
T
T
Y
Gambar 3.10. Diagram Alir Sistem Kerja Alat
Sumber : perancangan

40
BAB IV
PENGUJIAN ALAT DAN ANALISA
Pada bab ini akan dibahas mengenai pengujian dan analisis dari peralatan yang
telah dibuat. Hasil pengujian dianalisis dengan membandingkannya terhadap
perencanaan pengujian meliputi perangkat keras dan perangkat lunak dari alat yang
sudah selesai dibuat. Peralatan – peralatan yang digunakan dalam pengujian adalah
sebagai berikut :
* Power supply * Avometer Digital
* Mikrokontroler AT89S51 * Motor DC
* Seven Segment * Selenoid Valve
4.1. Pengujian Motor DC
4.1.1.Tujuan
Mengukur besarnya tegangan motor vibrator.
4.1.2.Peralatan yang digunakan
Power supply Mikrokontroler AT89S51
Avometer Motor DC ( Motor Vibrator)
Selenoid Valve
4.1.3.Langkah Pengujian
Langkah pengujian tegangan pada motor
Pengujian dilakukan dengan menghubungkan kutub positif avometer pada

41
kutub positif motor kutub negative pada kutub negative. Bersamaan dengan itu
alat dalam keadaan bekerja.
4.1.4.Hasil pengujian dan analisis
Tabel 4.1 Tegangan motor dc (motor vibrator)
Arus (A) Tegangan (V)
Motor Vibrator 2 30
Sumber : Spesifikasi motor DC
Tabel 4.2 Hasil pengukuran tegangan motor dc (motor vibrator)
Arus (A) Tegangan (V)
Motor Vibrator 0.271 24
Sumber : Hasil pengujian
Berdasarkan hasil pengukuran yang terdapat pada tabel 4.2 menunjukkan arus
motor pada tegangan kerja 24 Volt sebesar 0,271 A.
4.2. Pengujian Solenoide Valve
4.2.1. Tujuan
Mengukur besarnya tagangan yang dihasilkan solenoid pada saat bekerja.
4.2.2. Peralatan yang digunakan
Power supply Avometer
Solenoid Valve Mikrokontroler AT89S51
4.2.3. Langkah Pengujian
Pengujian dilakukan dengan menghubungkan kutub positif avometer pada
kutub positif solenoide kutub negative pada kutub negative. Bersamaan dengan itu
alat dalam keadaan bekerja.

42
4.2.4. Hasil pengujian dan analisis
Tabel 4.3 Tegangan solenoid valve
Daya (P) Resistansi (Ohm) Tegangan (V)
Solenoide Valve 6 W 2566 220 Vac
Tabel 4.4 Hasil pengukuran tegangan solenoid
Arus (A) Resistansi (Ohm) Tegangan (V)
SolenoideValve/Cetakan 0.042 mA 2566 220
SolenoideValve/Pres 0.034 mA 2816 220
Sumber : Hasil pengujian
Berdasarkan hasil pengukuran yang terdapat pada tabel 4.3 dan 4.4
menunjukkan bahwa tidak terjadi perbedaan arus pada suply selenoid valve 1 dan 2
dikarenakan adanya perbedaan resistansi.
4.3. Pengujian Penerimaan Data pada Penampil (Seven Segment)
4.3.1. Tujuan
Dalam hal ini Limit Switch bertindak sebagai pengirim sinyal data dan
mikrokontroler bertindak sebagai penerima data yang dihubungkan dengan seven
segment sebagai tampilan yang mewakili sebuah karakter bilangan biner.
Mikrokontroler disini berisi program yang berisi program yang berfungsi menerima
data dan menampilkannya pada port yang terhubung dengan seven segment.
Pengujian ini bertujuan untuk melihat apakah perintah yang dikirim sesuai
dengan data yang diterima oleh mikrokontroler dengan melihat hasil perolehan pada
seven segment yang terhubung dengan mikrokontroler.

43
4.3.2. Peralatan yang digunakan
Power supply Mikrokontroler AT89S51
Avometer 2 digit seven segment
4.3.3. Langkah Pengujian
Langkah pengujian dilakukan dengan menghidupkan alat kemudian
mengamati jumlah bilangan pada seven segment yang telah dihubungkan dengan
mikrokontroler, apakah sesuai dengan jumlah masukan atau jumlah dari hasil proses
pencetakan.
4.3.4. Hasil Pengujian dan Analisis
Tabel 4.5 Logika Penyalaan Lampu pada Seven Segment
Tombol Logika
a b c d e f g
0 1 1 1 1 1 1 0
1 0 0 0 0 1 1 0
2 1 1 0 1 1 0 1
3 1 1 1 1 0 0 1
4 0 1 1 0 0 1 1
5 1 0 1 1 0 1 1
6 1 0 1 1 1 1 1
7 1 1 1 0 0 0 1
8 1 1 1 1 1 1 0
9 1 1 1 1 0 1 1
Sumber : Hasil pengujian
44
Tabel 4.6 Hasil pengukuran tegangan Seven Segment
Tegangan (V)
Seven Segment 5.01
Sumber : Hasil pengujian
Dari hasil pengukuran pada rangkaian seven segment diketahui bahwa pada
saat logika 1 atau on, tegangannya sebesar 5.01 volt dan pada saat logika 0
tegangannya sebesar 0 volt.
4.4.Pengujian Sistem
4.4.1. Tujuan
Pengujian ini bertujuan untuk melihat apakah gerak mekanis perangkat
pencetak batako sudah sesuai dengan data dan perintah dari mikrokontroler.
4.4.2. Peralatan yang digunakan.
Avometer Perangkat mekanik pencetak batako
Power Supply Mikrokontroler AT89S51
4.4.3. Langkah Pengujian
Menghubungkan power supply, mikrokontroler dan perangkat mekanik
kemudian menghidupkan tombol power supply.
Masukan papan untuk cetakan ke dalam mekanik sampai menyentuh limit
switch.
Selenoid valve 1 akan menggerakan air cylinder untuk menurunkan cetakan dan
siap melakukan pengisian bahan material .
45
Setelah pengisian selesai, tekan tombol start untuk mengaktifkan motor dc
(vibrator) sebagai perata material selama 5 detik.
Setelah pemerataan selesai, secara otomatis solenoid valve 2 akan aktif
menggerakan air cylinder penekan/pengepres sampai menyentuh limit switch
kepadatan.
Cetakan dan penekan akan naik menandakan selesainya pencetakan, dan display
counter akan bertambah 1.
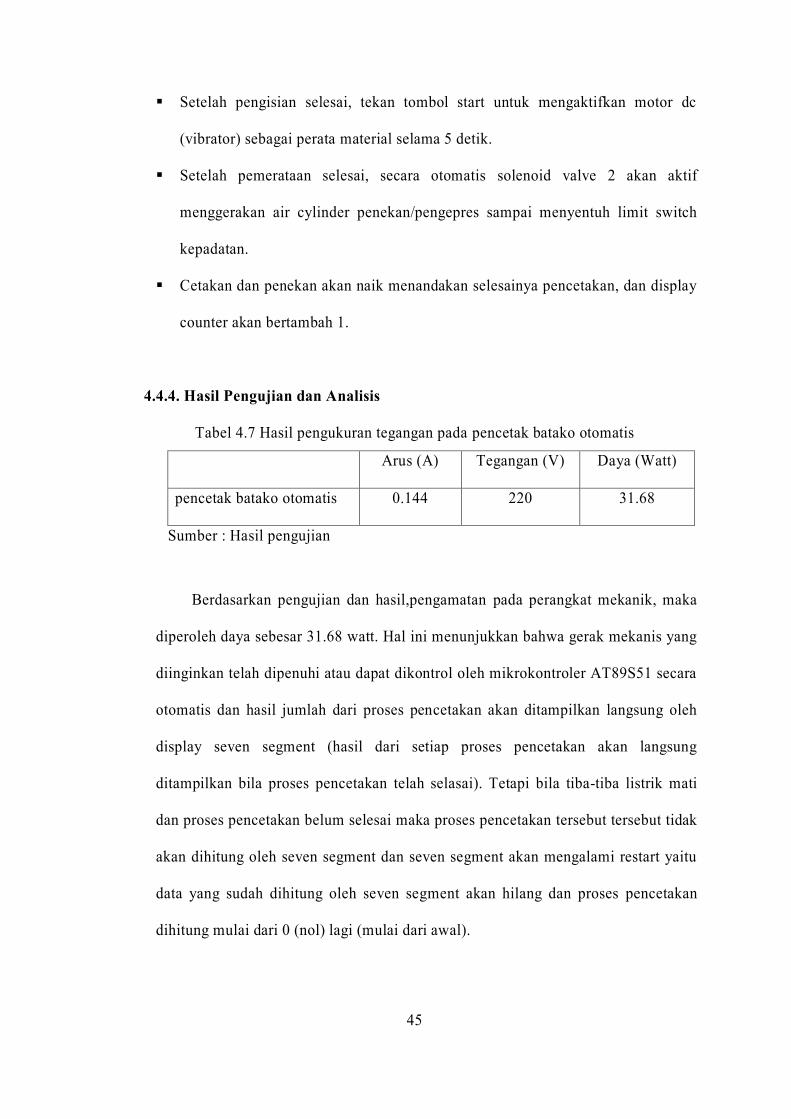
4.4.4. Hasil Pengujian dan Analisis
Tabel 4.7 Hasil pengukuran tegangan pada pencetak batako otomatis
Arus (A) Tegangan (V) Daya (Watt)
pencetak batako otomatis 0.144 220 31.68
Sumber : Hasil pengujian
Berdasarkan pengujian dan hasil,pengamatan pada perangkat mekanik, maka
diperoleh daya sebesar 31.68 watt. Hal ini menunjukkan bahwa gerak mekanis yang
diinginkan telah dipenuhi atau dapat dikontrol oleh mikrokontroler AT89S51 secara
otomatis dan hasil jumlah dari proses pencetakan akan ditampilkan langsung oleh
display seven segment (hasil dari setiap proses pencetakan akan langsung
ditampilkan bila proses pencetakan telah selasai). Tetapi bila tiba-tiba listrik mati
dan proses pencetakan belum selesai maka proses pencetakan tersebut tersebut tidak
akan dihitung oleh seven segment dan seven segment akan mengalami restart yaitu
data yang sudah dihitung oleh seven segment akan hilang dan proses pencetakan
dihitung mulai dari 0 (nol) lagi (mulai dari awal).

46
BAB V
PENUTUP
5.1. Kesimpulan
Berdasarkan hasil perencanaan dan pembuatan system otomatisasi pada skripsi
yang berjudul “PERENCANAAN DAN PEMBUATAN PENCETAK BATAKO
OTOMATIS DENGAN MIKROKONTROLER” dapat diambil kesimpulan antara lain :
1. Pada pengujian alat, motor dapat berputar menggerakan lampeng vibrator
dengan baik dan tidak mengalami gangguan hal ini dikarena penggunaan relay
sebagai driver cukuplah baik.
2. Perbedaan atau selisih dari hasil perhitungan dan pengukuran dipengaruhi oleh
kualitas komponen yang digunakan dan juga keakuratan alat ukur yang dipakai.
3. System mekanik dapat bekerja sesuai dengan yang diharapkan, antar cetakan
dan penekan tidak mengalami benturan.
4. Proses pencetakan alat ini sedikit lebih cepat bila dibandingkan dengan proses
manual dan hasil yang didapat dari proses pencetakan tergantung dari campuran
material yang digunakan.
5. Dari hasil pengukuran kerja alat didapatkan adanya alat pada saat bekerja sebesar
31,68 W.
47
5.2 Saran – saran
Untuk perkembangan peningkatan kemampuan alat ini dapat dilakukan hal-hal
sebagai berikut :
Bahwa system pemberian material dalam alat pencetak batako otomatis ini
masih dilakukan dengan cara manual maka untuk perkembangan selanjutnya
bisa dibuat otomatis.
Untuk perkembangan alat pencetak batako otomatis yang selanjutnya bisa
ditambahkan konveyer.
Untuk mendapatkan hasil yang maksimal dari proses pencetakan maka dalam
proses pencetakan perlu tekanan yang kuat pada waktu melakukan
pengepresan/penekanan.