algorttmo de integracion para materiales no … · ma disipación plástica) yno en artificios...
TRANSCRIPT
Revista EIA, ISSN 1794-1237 Número 3 p. 35-50. Junio 2005
Escuela de Ingeniería de Antioquia, Medellín (Colombia)
ALGORTTMO DE INTEGRACION PARA MATERIALESNO LINEATE§ CONSIDERANDO LO§ EFECTO§ DE
u§copI*asrIcIDAD, ENDURECIMIENTOCINEIVIATICO NO LINEAL Y DANO
JueN Dev¡o Gótr¿Ez.
R§§UMEN
En el Método de Elementos Finitos (MEF) la respuesta de materiales no lineales se considera por mediode formulaciones incrementales introduciendo una variable de tiempo. En el caso de materiales cuya respues-ta es independiente de la velocidad de deformación, dicha variable se considera como un seudotiempo; encaso contrario, dicha variable tiene significado fisico. Debido a su formulación incremental, el modelo consti-tutivo debe ser integrado en el tiempo a nivel local. En este artículo se discute un algoritmo de uso común enla literatura, pero incorporando adicionalmente los efectos acoplados de leyes de endurecimiento cinemáticono lineal, viscoplasticidad y daño. El algoritmo se implementa en una plataforma de elementos finitos. Comoprocedimiento de validación del algoritmo, el modelo se particulariza para una ley de flujo viscoplásticodisponible en la literatura para soldaduras eléctricas. Los resultados de las simulaciones se comparan conrespuestas experimentales existentes.
PALABMS CL,AVE: elementos finitos; modelos constitutivos; algoritmos de integración; plasticidad.
ABSTRACT
In the Finite Element Method (FEM) material non-linearities are considered through incrementalformulations in terms of a pseudo-time variable for the case of rate independent models and a real time variablein the case of rate-dependent models. The incremental statement of the problem implies that the constitutivemodels need to be time-integrated at the local level. In this article we discuss a standard algorithm available inthe literature where additionally we have incorporated the effects of non-linear kinematic hardening, üsco-plasticity, and damage. The algorithm is incorporated into a FEM code. In order to verifl/ the correctness of ourimplementation we have particularized the model to the case of a creep law available from literature for solderalloys. Numerical simulation results are compared with experiments taken from the literature.
KEYWORDS: finite element analysis; constitutive modeling; integration algortihms; plasticity.
* Ingeniero CiüI, Universidad de Medellín. PhD Candidate, Mecánica computacional. MSc Structural Engineering.University at Buffalo, The State University of New York. Asistente de Investigación. Laboratorio de EmpaquetamientoElectrónico, Universidad de Buffalo. [email protected] [email protected]
Artículo recibido 3-Xll-2oo4. Aprobado con reüsión 23-V-2oo5
Discusión abierta hasta enero 2006
Arconlruo DE TNTEGRACTóN pane MATERTALES No LTNEALES...
§ - §}ü?&ffiK}§Jtrffi§üN
La mecánica computacional ha sido amplia-mente utilizada durante los últimos 40 años comoherramienta de solución de diversos problemas enciencia e ingeniería. Dichos problemas, ya sea por lacomplejidad de sus modelos matemáticos, condicio-nes de frontera o geometría misma son prácticamen-
te insolubles por otros medios. Más aún, diferentesmétodos computacionales se han implementado ydistribuido en forma de códigos de uso comercial depropósito general.
Entre los métodos computacionales se desta-
ca el método de los elementos finitos (MEF), que hapasado por intensas etapas de desarrollo tecnológi-co y puede considerarse como la herramientacomputacional por excelencia entre la comunidadcientífica e ingenieril. Algunos de los códigos demultiuso más conocidos son ANSYS, ABAQUS y COS-
MOS, los cuales tienen la capacidad de resolver pro-
blemas de distribución de esfuerzos, transferencia decalor, propagación de ondas, electromagnetismo yotros, utilizando diversos modelos de respuesta para
los materiales considerados.
En particular, en el caso del análisis de esfrrer-
zos en un medio continuo con materiales elásticos
lineales, el problema puede considerarse agotado ylas contribuciones actuales se reducen más bien amodelaciones con complejidades desde el punto de
vista geométrico (métodos de mallado) y de las con-diciones de frontera (por ejemplo, el problema de
contacto).
En el caso del MEF en aplicaciones elásticas, elproblema se reduce a la solución de un sistema linealde ecuaciones algebraicas. Sin embargo, esto no oflr-rre si se consideran respuestas no lineales represen-tadas por medio de diversos modelos constitutivos.En ese caso, aún se emprenden grandes esfuezos de
la comunidad cientíñca, tanto en planteamientos de
los modelos mismos como de los algoritmos para su
tratamiento computacional. En este artículo se tratael segundo problema y, en particular, se hace referen-
cia al caso del algoritmo de integración de modelosconstitutivos incorporando los efectos combinadosde üscoplasticidad, endurecimiento cinemático nolineal y variables de daño para el caso de pequeñasdeformaciones y pequeños desplazamientos. Dichacombinación no se encuentra disponible o incorpo-rada de manera directa en los programas de softwarecomercial, lo cual limita la consideración de mode-los constitutivos más realistas.
El modelo presentado es general en el sentidode que no hay restricción sobre la ley de flujo üsco-plástico que se considera, ni en la variable de estadoque describe el daño en el sistema. Tratándose del MEFy considerando el punto de üsta netamente computa-cional, las soluciones globales para el modelo discreti-zado por elementosfinitos generalmente se obtienenpor medio de un proceso incremental-iterativo (por
ejemplo, un esquema de Newton-Raphson). En esteproceso un punto clave lo representa la integracióntemporal del modelo constitutivo.
En el caso de las formulaciones clásicas dedesplazamientos controlados mediante una secuen-cia de intervalos discretos de tiempo, las ecuacio-nes de evolución para los modelos constitutivos sonsistemas de ecuaciones diferenciales ordinarias deprimer orden, las cuales son altamente no lineales,acopladas y pueden ser matemáticamente rígidas.Las ecuaciones globales se plantean en términos deuna variable de tiempo y la totalidad T del análisis se
diüde en una serie de incrementos de tamaño I t.
Durante cada intervalo la respuesta se determinamediante un proceso iterativo hasta encontrar unestado de equilibrio. Una vez se encuentra una so-lución de equilibrio, la respuesta se actualiza al ins-tante f+l t.
En el planteamiento estándar basado en defor-maciones, el campo de desplazamientos se impone demanera proporcional al tamaño del intervalo y com-patible con las condiciones de frontera del modelo enconsideración. Posteriormente, el estado de esfuerzos
resultante de las deformaciones impuestas se determi-na mediante un proceso de integración temporal de
i!
Jwi tr{.rvista *I,4
las funciones de evolución del modelo constitutivo.Este proceso o algoritmo de integración es de impor-tancia capital, ya que puede afectar tanto la precisiónde la solución como su rata de convergencia. por ejem-plo, considerando la precisión es importante señalarque losvectores de fuerzas residuales (fuerzas residua-les excedentes que no satisfacen la condición de equi-librio) se obtienen directamente del estado de esfuer-zos actualizado. Por otro lado, la linealizacrón de esteestado de esfuerzos actualizado da lugar a la matriz derigidez tangencial (o matriz jacobiana de la iteración),que es necesaria para el zubsecuente ensamblaje delas matrices de rigidez de los elementos controlandoasíla rata de convergencia de la solución. Este proce-so de integración temporal o actualización del estadode esfuerzos y variables de estado, así como del jaco-biano del material se realiza a nivel local. Es decir, anivel de los puntos de integración numérica.
En las primeras etapas de desarrollo de algorit-mos para tratamiento de problemas elastoplásticosera común la utilización de métodos de integraciónexplícitos o semiexplícitos. Más adelante, se populari-zaron métodos implícitos debidos principalmente asu mayor estabilidad y más amplio rango de aplica-ción en comparación con las formulaciones explíci-tas. Algunas de las contribuciones importantes a esterespecto pueden encontrarse en el trabajo de Oweny Hinton (1980), que propuso un esquema iterativoglobal para la consideración de materiales elastoplás-ticos y üscoplásticos. Más rarde, Szabo (1985, I 9Sg)propuso un algoritmo altemo que eüta costosas ope-raciones de inversión matricial típicas de las formula-ciones del tipo de Owen y Hinton (1980). Aunqueeste tipo de formulaciones fueron importantes con-tribuciones en su momento, tienen la limitación deque son altamente dependientes del esquema iterati-vo global adoptado, lo que dificulta su implementa-ción en diferentes arquitecturas de elementos finitos.
Por otro lado, se encuentra el grupo de algo-ritmos de retorno radial de Wilkins (1960 y Krieg yKey (tgZ6) que realizan el proceso de integración denivel local haciéndolos muyversátiles para su aplica-
ción en diferentes plataformas. Actualmente este tipode estrategias son las utilizadas por las arquitecturasmás modernas de solución de problemas no 1inealespor elementos finitos. Utilizan como algoritmo de so-lución global el método de Newton-Raphson o mo-dificaciones de este. Sin embargo, Simo y Taylor(1985), basados en las contribuciones de Hughes yTaylor (1978) yNagtegaal (1982), notaron que parapoder preservar las excelentes características de con-vergencia cuadrática del método de Newton era ne-cesario utilizar en el proceso de integración un jaco-biano correspondiente con el algoritmo de integra-ción y no el obtenido de la formulación continua delproblema. Por lo general este jacobiano se denominaen la literatura módulo tangencial consistente. Des-pués Simo y Hughes (1998) presentaron el problemade integración del modelo constitutivo como unode optimización convexa y dieron lugar a los algorit-mos de retorno por transformación. Este punto deüsta tiene la gran ventaja de tener un signiñcado to-talmente fisico (ver, por ejemplo, el principio de máxi-ma disipación plástica) yno en artificios matemáticosque usualmente oscurecen la naturaleza del proble-ma. En la actualidad este tipo de algoritmos es consi-derado como la herramienta óptima para integrarlos modelos constitutivos.
En este artículo se trata el algoritmo de retor-no por transformación, pero a diferencia del modeloconsiderado en Simo y Hughes (1998), se tiene encuenta también la introducción de una variable dedaño y el caso de endurecimiento cinemático no li-neal. Adicionalmente y siguiendo la estrategia deAlfano et al. (2001), se incorporan también efectosviscoplásticos en el esquema. El algoritmo que se pre-senta es general en el sentido de que se puedenimplementar diferentes formas de la ley de flujo quedescribe la evolución de la deformación üscoplástica.
Con el fin de validar el esquema de integra-ción, se particulariza la ley de flujo implantando unmodelo üscoplástico disponible en la literatura y de-sarrollado originalmente para soldaduras eléctricasde aleaciones estaño-cobre.
Escuelo de Ingenierío de Antioquio i
137
AICON¡TIT,TO DE INTEGRACIÓN PEN.E MATERIALES NO LINEALES ...
^^t-'l
En la sección 2 se describe el modelo constitu-
tivo ysu respectivo algoritmo de integración. La sec-
ción 3 presenta algunas simulaciones numéricas ycomparaciones con resultados experimentales reco-
lectados en la literatura. La sección 4 presenta las
conclusiones y propuestas para mejoramiento del
modelo.
$§. §,§sn§§,ffi {:üN$Y}TUTMY ALSORIT&{$ §ffiINT§GRACTOW
En lo que sigue se describe un modelo consti-
tutivo de plasticidad clásica de Hill (1950) para el caso
de pequeñas deformaciones y pequeños desplaza-
mientos. Las ecuaciones evolutivas del modelo están
descritas de manera análoga a como se plantean en
Simo y Hughes (t sg8), pero con la característica adi-
cional de que consideran endurecimiento cinemáti-co no lineal, efectos viscoplásticos y daño. El algorit-
mo de integración es el conocido algoritmo de retor-
no por transformación (retum mapping). Los efectos
üscoplásticos se incorporan siguiendo la estrategia
de Alfano et al. (2001). El modelo de üscoplasticidadque se plantea es generalyhaceuso del concepto de
esfuerzo adicional üscoso. Se incorporan los efectos
de endurecimiento cinemático siguiendo la estrate-
gia de Lubarda y Benson Qooz). La variable de daño
se introduce en el modelo utilizando el concepto de
esfuerzo efectivo de Kachanov (1986), Rabotnov(1968) y el denominado principio de deformación
equivalente. A continuación se presentan las ecua-
ciones en términos de su formulación por teoría de
flujo mediante una función de cedencia que separa
el dominio elástico del dominio üscoplástico, una ley
de flujo que especifica la evolución de la deforma-
ción üscoplástica, un conjunto de leyes de endure-
cimiento que especifican la evolución de los paráme-
tros de endurecimiento yla evolución del parámetro
de daño que se introduce como una variable de es-
tado adicional.
Con el fin de introducir el modelo de manera
más general, es conveniente presentar primero las
ecuaciones para un material cuya respuesta es inde-pendiente del tiempo y sin considerar los efectos de
daño, es deci¡ para un material con respuesta plásti-
ca. En este caso la variable temporal se introduce por
conveniencia matemática y no tiene ningún signiñ-
cado fisico.
Consideremos el siguiente modelo de plastici-
dad clásico de von Mises para un material isotrópicosuponiendo una teoría de pequeñas deformacionesy pequeños desplazamientos.
Ley de Hooke
Para un material clásico de von Mises con res-
puesta independiente del tiempo y con comporta-miento isotrópico la ley de Hooke, que relaciona los
esfuerzos con las deformaciones, se escribe como
ó=C:(e -É'-io) (1)
donde é,ép y já son rata de deformación total,
deformación plástica y deformación térmica respec-
tivamente, C es el tensor constitutivo elástico y : re-
presenta la contracción entre dos tensores.
§uperficie de cedencia
El dominio elastoplástico se define por mediode la siguiente función de cedencia
aF (o,a)= lls-xll - l1.t"l=lls-xll - R(a) (2)
donde F(o,a)=0 representa una superhcie de
cedencia que separa los dominios elásticos e
inelásticos, Xes el componente desüador del tensor
de esfuerzos calculado como ,S= t -l or, p es laJ
presión hidrostática, 1es un tensor unitario de segun-
do orden, ll4ll= J ,l A representa la norma del tensor6
A ! R(a) =^llrOl es el radio de la superficie de!J
cedencia en el espacio de esfuerzos.
Ídcv".ista §IA

1l[11w6§m de* ih,§ujo
La evolución de la deformación plástica se re-presenta por medio de una ley de flujo general,
i' = yñ (3)
-¡rdonde ñ =
u' representa el vector normal a la su-a.oo
perficie de cedencia.
Endurecimiento isotrópieo
El endurecimiento isotrópico o tamaño de lasuperficie de cedencia se describe especificando la
evolución de su radio. Un modelo común en la lite-
ratura es el debido a Chaboche (1989) en el cual
t;«(o)=
11r,. R,(t-e-'" ) y donae el parámerro
de endurecimiento a evoluciona de acuerdo con
Ia ecuación (4, Yo representa el esfuerzo de ceden-
cia inicial, R- representa un valor de saturación de
endurecimiento isotrópico y c representa la veloci-
dad de endurecimiento isotrópico.
@)
§ndurecimlento cinemático no lineal
La leyde endurecimiento cinemático no lineal
se toma de Chaboche (1989). Fue originalmente pro-puesta por Armstrong y Frederick(I 996) y se describe
en la Ec. (S)
* =créo -crXa (5)
donde X es un tensor de esfuerzos de retomo que
representa el centro de la superficie de cedencia en
el espacio de esfuerzos y c r czson constantes de en-
durecimiento cinemático no lineal. En la expresión(5) el primer término en el lado derecho representa
el modelo clásico de endurecimiento cinemático li-neal de Prager (1 956), mientras el segundo represen-
ta el término no lineal introducido por Armstrong yFrederick (1996).
En las ecuaciones (3) y @) y es un parámetrode consistencia no negativo que representa el carác-ter irreversible del flujo plástico y cumple las siguien-
tes propiedades:
l. Para un material independiente del tiempo /atiende las denominadas condiciones de cargddescarga y de consistencia.
y>-0 y F(o,a)<O (6)
YF(o,a) = g O)
2. Para un material dependiente del tiempo(üscoplástico) las condiciones (6) y (7) se reem-plazan por una ecuación constitutiva de la forma
r- (orr¡)rl
donde ? representa un parámetro del material que
describe losefectosüscoplásticos. En ellímite ry -+ 0el modelo constitutivo es análogo al de un material
independiente, Simo y Hughes (1 998).
En el caso de un material independiente del
tiempo, F satisface las condiciones (6) y (7) y,
adicionalmente, los estados de esfuerzo F (o, a) > 0
son inadmisibles. Por otro lado, en el caso de un ma-
terial dependiente del tiempo,la magnitud del flujoüscoplástico es proporcional a la distancia del esta-
do de esfuerzos a la superficie definida porF (o , a) = 0 . Basados en este argumento se tiene que
para un intervalo de tiempo A/ y usando la ecua-
ción (8) puede establecerse la siguiente relación
(8)
'=,(#)donde ofA¿t) = ó ,( !,"\\
^r / t ff] Y LY = Tn*tLt (10)
que a su vez se basa en un esquema de diferencias de
Euler.
(e)
i
lqs*t"'-Escuelo de lngenierío de Antioquio

Alconlruo DE TNTEGRACIóN pena MATERTALÉs No LINEALES
A.*mplami*ntn de [a wwrimhle de daño
La variable de daño se puede acoplar al modelo por medio del principio de deformación equivalente.(Tang,2002),
o=(t-D)c:(e -é''p -éo¡ (11)
r = lls - x" ll - 1r - o)
rEr 1, ¡ = lls - x' ll - (r - D) R(d)
Q -I'DdeuP. = ¡, -,.on+l IL n+l .*"n+t -'
llt .' - x?.,11
La sustitución de la ecuación (t6) en la ecuación (15) implica
ül*r=',,Or(ffi ?,.r)donde , - c,(t-o)
"htt l+c,(l-DXl -e)ty
La regla de flujo (3) permite expresar la ecuación (14) como
I
401
(12)
donde D es una medida del daño y
*o =(r-D)(c,á'P -crxa) (13)
representa la evolución del esfuerzo de retomo incluyendo los efectos de daño.
Algoritmo de rütorno por transformación
Considere el siguiente estado de esfuerzos denominado usualmente estado de prueba, el cual se obtie-ne tras suponer que durante el incremento de tiempo el flujo plástico es nulo.
Sji, = ,S, + (1 - D)2¡rA,e,*, (14)
donde Ae,*, es el incremento en la componente desüadora de la deformación total.
El incremento del esfuerzo de retomo puede obtenerse a partir de la ecuación (13)
ü?*,=(t-»)1c,ae",,.,-c',tylex! +(-e)xfl,]] ,"r" 0<0<1 (1s)
t;donde O, = lít, y se ha utilizado una regla generalizada de punto medio para el término no lineal con los
valoresextremos d =0y 0 -l correspondientesaunesquemadediferenciasdeEuler.Delasecuaciones(3)y (lz) se puede obtener el equivalente algoítmico del incremento üscoplástico,
(16)
(17)
H evista Ell{

S,,*l = Sí;, - Ly(l- rrrlffffiTras deñnir el esfuerzo relativo 6?., = S ,u - X lu se tiene de la ecuación (18)
FD - q - Yl-,: s;:, - ^y(t- o¡z¡,flt !fo- xl -dxl,',,an+t * u,+t ,, n_t _ u n.l a/ \r u .rL tt
ilrr,, _ ,i ll
/\
(tz) en (tg) implica
ü*r - X?., + Lrll - D)2t, * r,*r]Su!fu = B,' lls,., - xi, ¡¡ n
donde B,=S'lu-X? *b,uA,yX! y bn*t=2r,ucl
(18)
(1e)
(zo¡
QL)
De la ecuación (20) es claro que el vector normal a la superficie de cedencia puede ser expresado en
términos de la información al comienzo del incremento, por lo tanto, se tiene
S ,_XD, Bn+t n+t n"n+t -
ll+., -xí.,11 llr,ll
Calculando el producto escalar de la expresión (tq) por ella misma se obtiene
llt .,- xi-,ll* ^yl!-
D)2p+a,*t}=
{ttt - x?ll' *ll$- o)zpte,*,+b,*,Lvx:ll' *2(s,- x?),1(r- »)zpte,*,+bn*,t,v*:)\ ez)
Utilizando la ecuación (tz) para el caso independiente del tiempo o la ecuación (9) para el caso
dependiente del tiempo se puede obtener la siguiente ecuación escalar no lineal para el parámetro de consis-
tencia, que puede resolverse por un método de Newton local u otro método numérico,
s(^y)={llq-r,'ll'.ll(, -D)2¡tLe,*,+b,*,a,yx!ll'+2(s, -xi):l(t-»)zpten*,+bn*,Lyr:]\
5 ( 6 ) -. -r ^( tyn) rz¡t-(r - D) l1rl",. li^r)- ^/[(r
- D)zp + a.,,f- r(#)
El esquema de actualización de las variables dependientes resulta una vez la ecuación (23) se resuelve
y el valor de L,y se encuentra:
a,,-t=a,,+lz/ttf
Escuelo de lngenierío de Antioquio
(24)
l*,
Alconlruo DE INTEGRACIóN pax¡, MATERTAT-ES No LTNEAT-Es ...
IXl*, = X! + a,*,A,y[ :,,,:!i\"n+t "n ' -'n+t-t
Illt'. -xi.'ll
á?., = (t- D)K(a,.r)ffi
ü*r = 6l.r+ XX.,
on+t = rc (t - o)tr (€,*t)r + 2¡t(t - q( - e'f - r,.,ffi- rr,)
Linealiracion {ia*mb*am«l csrx}sistente}
f a¡, -r
don*r =(1- D)l c -2pt us+L-ZpLy sgPll, dr,*,L OE,*t OErt )
oLrenlaque
-AE*t
resulta deQZ) como:
)Lf =n:,0€,*t K3
En lo anterior se ha hecho uso de
K, = Kr+ K,
K'K.=l*^ * o'+t
' 3tt 2p(l- D)
x== *J^^9-¡-!-É".L[4,., (t -l)ty-t):xi.=-L * *q' 2P(l- D) 2P(l- D)' '*'\ ,, ' ) " 2P(l- D) 1LY
oL*,y a€*, resulta de (21)
aú," _ar,," ?8, =_1_11 _1.,,,@u,,_¡, j4-Oe,,*t OB, Oe,-, ll4.,llt^
::4't - o*"'O€,,*,
I
dzl't
Gza)
ft.evista EIA
€'Í*t= 4'+ nf ffi (2s)
(zo¡
(27)
(28)
Qe)
?.,)
Tras diferenciar la ecuaci ón Qg) con respecto a la deformación total al final del incremento, se obtiene
(30)
(:t)

AB,
donde
= 2p (t - q( r-1, * ll *(a,-,47 *á,,*, ) r,,* U\ J )
l "-' ' tt+tl tt ÓC,*t
Haciendo Ko = b,uA,y +bn*, Vsustituyendo *, "r(32a) resulta:
o€ r*t
*,= H *='ffi[' - u' *''.' - Ii' t) .
m(, - &,*, @ fr,*,),(}u"r "í )
Usando las ecuaciones (3t) y (32b) en (go) resulta:
c :{lo =( r - ¿) *i o i + z p (t - D) 6,*,(" - i t t,) - z t, (t - D) 0.*,ñ,u @ ñ,u -
Gab)
G3)
donde
5r*, =l-Ly2p(1- D)
llB.ll
Lyzp(I- D)
ll¿ll
3, §TM{"}§-ACXON§§ NUMÉRICAS
Para validar el modelo numérico presentado es conveniente particularizar la ecuación (8). Para este fin
se selecciona la ley de flujo de Kashyap y Murty (1981) propuesta en su origen para describir la respuesta de
aleaciones de plomo-estaño utilizadas comúnmente en soldaduras eléctricas para empaquetamiento electró-
nico. Kashyap y Murty (1988) describen el comportamiento üscoplástico de este material por medio de la
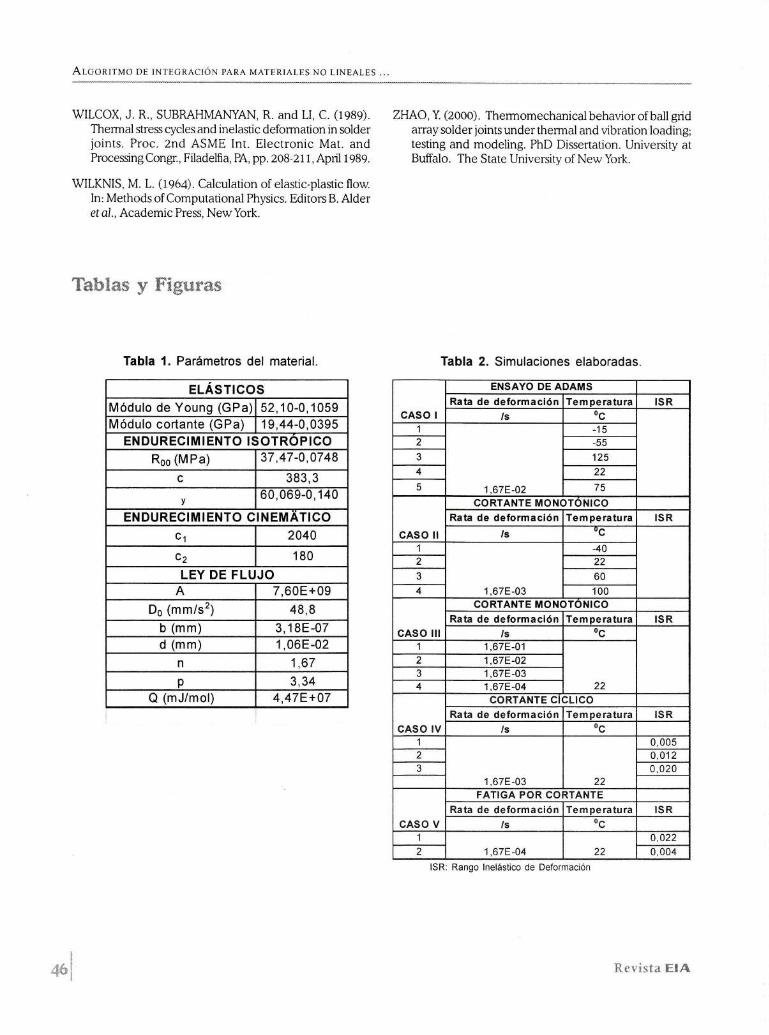
siguiente relación fenomenológica y con las propiedades presentadas en la tabla 1.
6,.r=l
Escuelo de lngenierío de Antioquio lo*

Alcor.rruo DE INTEGRACTóN paRe MATERTALES No LtNEALES...
G4)
Adicionalmente, se utiliza la siguiente funciónde tipo Perzyna que permite definir de manera com-pleta el modelo constitutivo indicado en la Ec. (8)
(3s)
Utilizando este modelo se simulanuméricamen-te la respuesta de una capa delgada de soldadura eléc-
trica y sometida a ensayos de cortante monotónicos,cíclicos y de fatiga reportados en Tang (2002). Tam-
bién se modela el ensayo de tensión uniaxial realizadopor Adams (1986). Pueden encontrarse detalles de
ambos estudios experimentales en dichas referencias.
La tabla 2 presenta las simulaciones elaboradas. La fi-
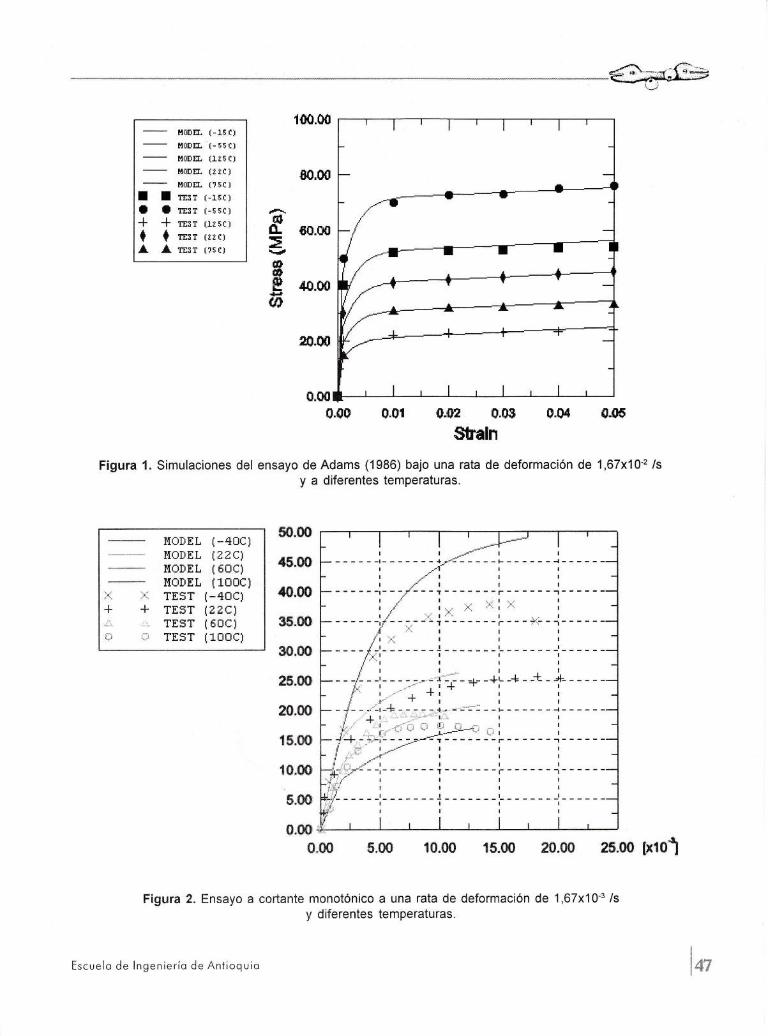
gura 1 muestra los resultados de las simulaciones com-parados con los ensayos en tensión uniaxial de Adams(1986) a diferentes temperaturas. La figura 2 muestra
comparaciones con ensayos de cortante monotónicoa diferentes temperaturas y para una rata de deforma-
ción constante. Se observa que el modelo efectiva-
mente muestra la variación de las respuestas a dife-
rentes temperaturas. Las diferencias con los resulta-
dos experimentales son esperables, pues en la realidady como consecuencia de su proceso de fabricación,
las soldaduras tienen imperfecciones yvacíos que nose consideran en el modelo computacional. La figura
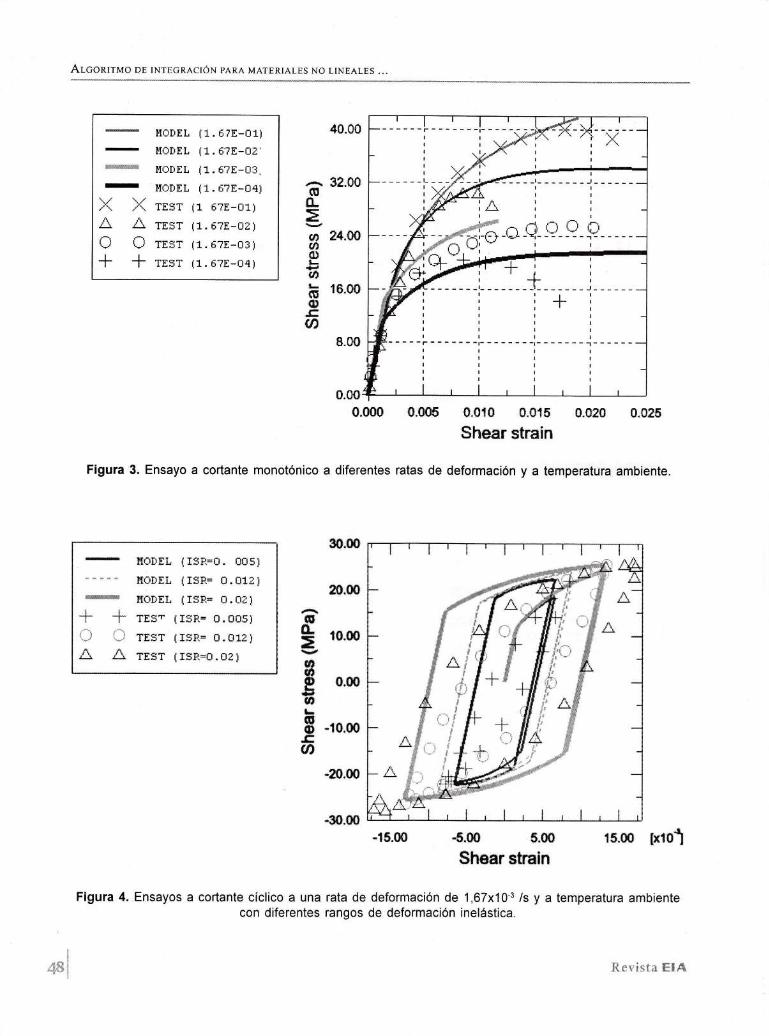
3 muestra el mismo ensayo anterior, pero a temperatu-
ra ambiente y para distintas ratas de deformación. Se
observa que el modelo efectivamente refleja la varia-
ción de la respuesta de la velocidad de aplicación de
los desplazamientos. En la figura 4 se comparan las
simulaciones con los resultados de ensayos en condi-
ciones de cortante cíclico a rata de deformación cons-
tante, temperatura ambiente y diferentes rangos de
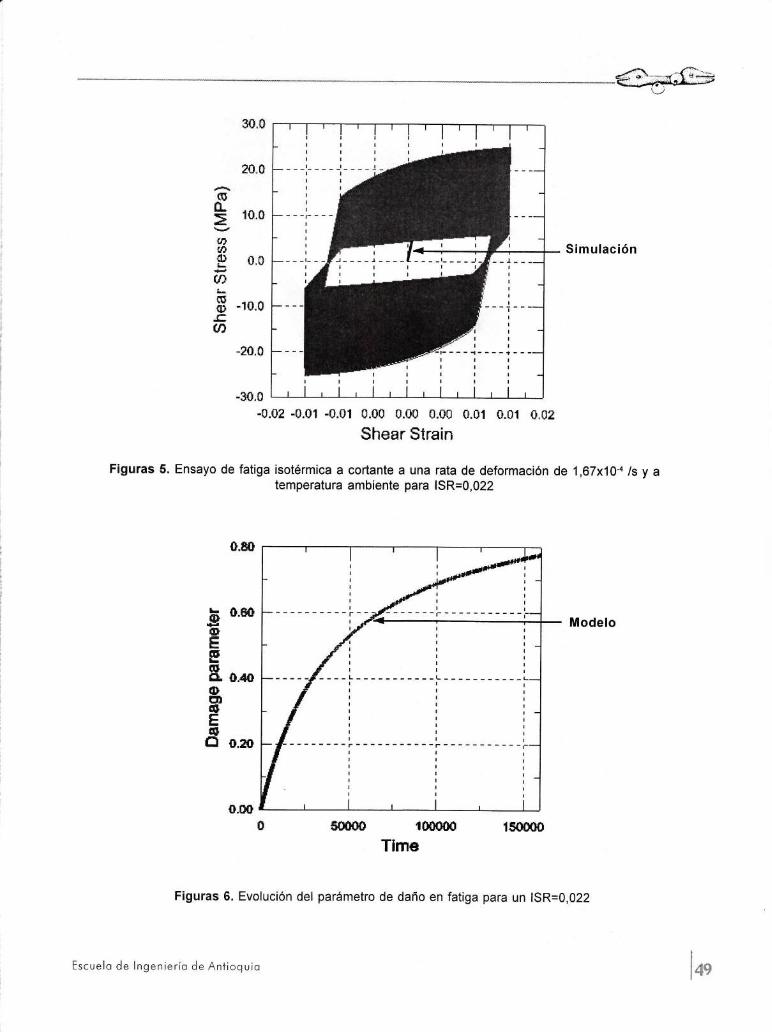
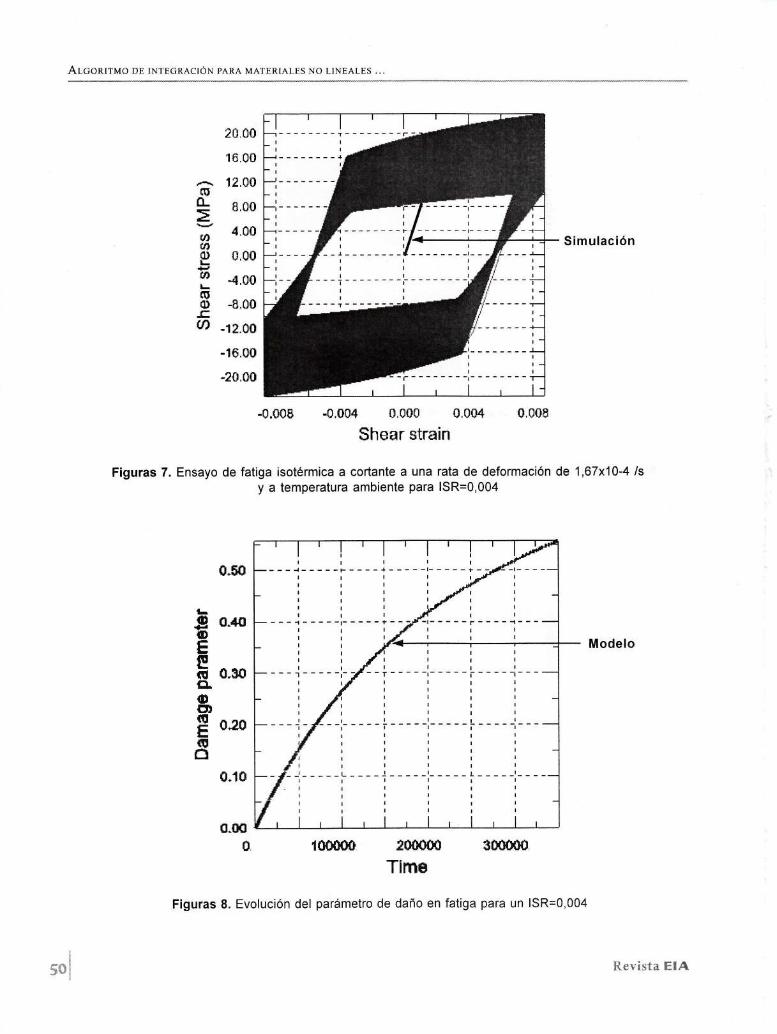
deformación inelástica. Las figuras 5-8 ilustran simula-
ciones durante varios ciclos de fatiga y diferentes ran-gos de deformación inelástica así como también laevolución de la variable de daño correspondiente a
dichas simulaciones. El marco computacional efecti-
vamente describe la degradación por ciclos de fatiga.
4-$l
s. trffiFdffi§,ti§Iffi§{§s YsLxsm§{mpüfr§As ffi&§h&§'§^&ffiA.$ffi § ffi {Jry-&.}Rffi S
En este artículo se presenta la implementaciónde un modelo constitutivo que satisface requisitostermodinámicos así como su algoritmo de integra-ción. El algoritmo utilizado es el clásico esquema pro-puesto por Simo y Hughes (I998), pero extendidopara considerar leyes de endurecimiento cinemáticono lineales, efectos dependientes del tiempo ydaño.El algoritmo puede adaptarse con facilidad para tra-tar problemas axisimétricos y en 3D. El carácter localdel esquema permite su implementación en diferen-tes plataformas con elementos finitos. Las ecuacionesse presentan de manera general de forna que se pue-
den adaptar a diferentes modelos constitutivos comoel introducido.
Para problemas idealizados como de esfuerzosplanos se debe desarrollar un algoritmo altemo. Di-cho esquema que incorpora simultáneamente efec-
tos de daño, endurecimiento cinemático no lineal yefectos üscoplásticos no está disponible en la litera-
tura actual.
Es deseable también utilizar este modelo para
estudiar la respuesta de materiales en nuestro medioparticularizando las ecuaciones presentadas e incor-porando diferentes medidas de daño que se podríanadaptar fácilmente al algoritmo.
§. RffiP§RHNTTA§
ADAMS, P. J. (1986). Thermal fatigue of solder joints inmicro-electronic devices, M. S. Thesis, Department ofMechanical Engineering, MII Cambridge, MA, 1986.
ALFANO, G., DeANGELIS, F. and ROSATI, L. (2001). Ge-neral solution procedures in elasto/viscoplasticityComput. Meth. Appl. Mech. Eng. 190, pp. 5t23-5147.
ARMSTRONG, P. J. and FREDERICK, C. O. (1996) Amathematical representation of the multiaxialBauschinger effect, CEGB Report RD/B/N73 1.
BASAMN, C. and TANG , H. (2ooz) . lmplementation of athermodynamic framework for damage mechanics of
ke (aYn=¡fi,-ul;) "'*
(o(r))= (¡')'
Itrvista §.IA
solder interconnect in microelectronic packaging.Proceedings of IMECE, 2002 ASME InternationalMechanical Engineering Congress & Exposition. NewOrleans, Louisiana.
BASARAN, C. and YAN, C. (1998). A thermodynamicframework for damage mechanics of solder joints.Joumal of Electronic Packaing, Trans. ASME, 12o,pp.379-384.
BASARAN, C., CHANDAROY R. and ZHAO, Y. (1998).Influence of grain size and microstructure on dynamicresponse of solder joints, 98-WA/EEP-12, ASMEfublications.
BASAMN, C., ZHAO, Y., TANG, H. and GÓMFZ, J., Qoo4).A damage mechanics based unified constitutive modelfor Pb/Sn solder alloys. Accepted. ASME Joumal ofElectronic Packaging.
CHABOCHE, J. L. (1989) Constitutive equationsfor cyclicplasticity and üscoplasticity. Intemational Joumal ofPlasticity, Vol.3, pp. 247 302.
DARVEAUX, R. and BANERJI, K. (1992). Constitutiverelations for tin-based solder joints, IEEE Trans. Comp.Hybrids Manuf. Technol., vol.l5 No. 6,pp. tol3-1o24,Dec.t992.
HILL, R. (1950). The mathematical theory of plasticity.Oxford University Press, Oxford, Reino Unido.
HONG, B. Z. and BURRELL, L. G. (1995). Nonlinearfiniteelement simulation of thermoüscoplastic deformationof C4 solder joints in high density packaging underthermal cycling, IEEE Trans. Components, Packaging,and Manufacturing Technology-Part A, vol.18, No. 3,
PP.585-590, SeP. 1995.
HUGHES, T. and Taylor, R. (1978). Unconditionally stablealgorithms for quasi-static elasto/viscoplastic finiteelement analysis. Computers and Structures. 8, pp. t69-173.
KACHANOV, L. M. (1986). Introduction to continuumdamage mechanics. Martinus Nijhotr, Países Bajos.
KASHYAP, B. and MURTY, G. (1981). Experimentalconstitutive relations for the high temperaturedeformation of a Pb-Sn eutectic alloy. Material Scienceand Engineering. 50, pp. 205-213.
KITANO, B. P., KAWAI, S. and SHIMIZU, L. (1988). Thermalfatigue strength estimation of solder joints of surfacemount IC packages, Proc. 8th Annual Int. Elec.Packaging Conf., IEPS, Dallas, Texas, pp.4-8, Nov. 1988.
KNOCHT, S. and FOX L. R. (1990). Constitutive relationand creep-fatigue life model for eutectic tiniead solder,
Escuelo de lngenierío de Antioquio
IEEE Trans Comp. Hybrids Manuf. Technol., vol. t3,pp.424-433,1990.
KRIEG, R. D. and Key, S. (1976). Implementation of a timedependent plasticity theory into structural computerprograms. Constitutive equations in viscoplasticity:Computational and engineering aspects, Editors J. A.Stricklin and K. J. Saczalski, AMD-20, ASME, NewYork.In: Methods of Computational Physics. Editors B. Aldere¿o1., Academic Press, NewYork.
LAU, J. and RICE, J. R. (1990). Thermal stresy strainanalyses of ceramic quad flat pack packages andinterconnects, Elect. Components and Technology,40th Conf., vol.t, LasVegas, Nevada, pp.824-934,May,r990.
LUBARDA, V and BENSON, D. (2002). On the numericalalgorithm for isotropic-kinematic hardening with theArmstrong-Frederick evolution of the back stress.Comput. Methods Appl. Mech. Engrg. t9t, pp. 3583-3596.
McDOWELL, D. L., MILLER, M. P. and BROOKS , D. C.(1994). A unified creep-plasticity theoryfor solder alloys,Fatigue Testing of Electronic Materials, pp. 42-59, ASTMsTP I 153, 1994.
NAGTEGAAL, J. C. (1982). On the implementation ofinelastic constitutive equations with special referenceto large deformation problems. Computer Methods inApplied Mechanics and Engineering 33.
OWEN, D. R. J. and HINTON, E. (1980). Finite element inplasticity, Pineridge Press Limited, Swansea, ReinoUnido.59¿p.
PMGER, W: (1956). A new method of analyzing stressesand strains in work-hardening plastic solids. J. Appl.Mech., 23 @), pp. 493- 496.
MBOTNOV, Y. N. (1968). Creep rupture.ln Proceedingsof the XII Intemational Congress onApplied Mechanics,Standford-Springet pp. 342-349.
SIMO, J. and HUGHES, T. (I998). Computaüonal inelasticity.Interdisciplinary applied mathematics. Springer.
SIMO, J. and TAYLOR, R., (1985). Consistent tangent ope-rators for rate dependent elasto-plasticity. ComputerMethods in Applied Mechanics and Engineering48, pp.I0t-r 18.
TANG, H. Qoo2). A thermodynamic damage mechanicstheory and experimental verification for thermomecha-nical fatigue life prediction of microelectronics solderioints. PhD Dissertation. University at Buffalo. The Sta-te University of New York.
lot
At-coRtrlr¿o DE INTEGRACTóN pene MATERTALES No LINEALEs ...
WILCOX, J. R., SUBMHMANYAN, R. and LI, C. (1989). ZHAO,Y. (2000). Thermomechanical behaviorof ball gridThermal stress cycles and inelastic deformation in solder array solder joints under thermal and r¡rbration loading;ioints. Proc. znd ASME Int. Electronic Mat. and testing and modeling. PhD Dissertation. University atProcessingCongr.,Filadelfia,PA,pp.208-211,ApriI 1989. Buffalo. TheStateUniversityofNewYork.
WILKNIS, M. L. (1964). Calculation of elastic-plastic flow.In; Methods of Computational Physics. Editors B. Aldereúa1., Academic Press, NewYork.
Tablas y S.i6ura*
Tabla 1. Parámetros del material. Tabla 2. Simulaciones elaboradas
ELÁSTICOSMódulo de Young (GPa) 52,1 0-0,1 059Módulo cortante (GPa) 19,44-0,0395
ENDURECIMIENTO ISOTROPICOR6e (MPa) 37,47-0,0748
c 383,3
v6U,Utrg-U,14U
ENDURECIMIENTO C NEMATICO
C1 2040
C2 180
LEY DE FLUJOA 7,60E+09
Ds (mm/s') 48,8
b (mm) 3,18E-07d (mm) 1,06E-02
n 1,67
p 3,34Q (mJ/mol) 4,47E+07
cAso I
ENSAYO DE ADAMSRata de deformación Tem Deratura tsR
/s oc
1
1.67E-02
15
2 -55
3 1254 22
5 75
cAso I
CORTANTE MONOTONICO
Rata de deformación Tem peratu ra ISR
/s ,c1
1,67E-03
-402 22
3 604 100
CASO lil
CORTANTE MONOTONICO
Rata de deformación Tem oe ratu ra tsR/s oc
1 I,67E-0'l
22
2 1,678-023 1,67E-034 1.67E-04
cAso lv
CORTANTE CICLICORata de deformación Tem peratura ISR
/s oc
1
1,67E-03 22
0,0052 o.o123 0,020
CASO V
FATIGA POR CO RTANTE
Rata de deformación Tem pe ratu ra lsR/s oc
1
1,67E-04 22
0,0222 0,004
ISR: Rango lnelást¡co de Deformac¡ón
I
sei Rr:vista §IA
-
Hm¡EL t-19 (l
-
HI'EEL f-5tfl
-
H¡:|DEL f.¡-ttC)
-
r{o[EL (t tc I
-
Hr:rtrEL {15t}I I rrsr r-rsclI I rr¡r (-ssr)+ * rr¡r urstlf f resr ttrcrt l. rrsr {rsc)
80.00
20.00
0.00 0.0r 0.02 o.flt¡ 0.04 0.0§
Süaln
Figura l. Simulaciones del ensayo deAdams (1986) bajo una rata de deformación de 1,67x10¿ /sy a diferentes temperaturas.
f,¡O- 60.00:EIDüÉ ¡+0.00
t¡t
§+
ü
+
ü
r{oDEL (-+EC}rroDEL {2ZC}UoDEL f 6OCJ
IfoDEL (1E0ClTE5T (-4OClTEST {22C}TEST (6EC}TE5T {1úOC}
§§,00
¡ffi.n0
{0.{x}
35.0ü
s0.00
¿§.00
20.00
f§.ü8
1fi.$ü
s.(§
ü.0üü.00 1ü.00
Figura 2. Ensayo a cortante monotónico a una rata de deformación de 1,67x10-s /sy diferentes temperaturas.
Escuelo de lngenierío de Antioquio
0,00 f §.00 2t.00 tx101e0.m
lor
Alconrruo DE INTEGRACIóN pane MATERIALES No LTNEALES
r,toDEL (1. É78-E1l
HODEL {1.6?E-r12',M HODEL (1.6?E-83,r IIODEL {1. 6?E-ü4¡
X X resr (1 6?E-o1r
A A resr {1.6?E-ozlü ü rrsr (1.6?E-03]
+ * rrsr {1.6?E-ü4t
ltttil (i
}IüSEí {rsP" ü. 0ü.5}
§üúEt {IsP: fi.frl?}I{O§f,L {ISF;= fi.OZiTE5'r { Isp.§ 0. §05}
TEST { I§F"= ü.01ü }
TEST (I§P"=ú,ú21
(EfLEútlfjo,LfifEou,
32.üO
24.$0
1S.ffi
8.00
0.000 0.005 0.010 0.015
Shear strain0.020 0.025
Figura 3. Ensayo a cortante monotónico a diferentes ratas de deformación y a temperatura ambiente.
20.00
r0t00
0.00
-f0.00
-?0.00
-§0.§s1§.üo t$01
§o-§tl,ráptñ*§o-c§r,
¿.ü8 S.00
§hffir rffiln
Figura 4. Ensayos a cortante cíclico a una rata de deformación de 1,67x103 /s y a temperatura ambientecon diferentes rangos de deformación inelástica.
Irll i Ke vista §lA
sCI.0
20.0
I0.0
CI,0
.IÜ.0
-20.0
Simulación
-30.0
-0.02 -0.01 -s.01 0.00 0.00 0.00 0.01 0.01 0,02
Shear Strain
Figuras 5. Ensayo de fatiga isotérmica a cortante a una rata de deformación de 1,67x10-a ts y atemperatura ambiente para ISR=0,022
Modelo
50000 100000
Tlme
Figuras 6. Evolución del parámetro de daño en fatiga para un ISR=0,022
§fL
=ft,tr]{,1
U)
(§q)
o
#ase
r-o(D
EEiltELoEDqtEllE
iiill'ilI
rrrr'',a--
FH: ::tttlrrl,l,t,t
Escuelo de lngenierío de Antioquiolon
Alconrruo DE TNTEGRACTóN pene MATERTALES No LTNEALES ...
QfLEr¡)io0t
tñ
ñ0]
!
w
20.00
1€,00
12.00
8,00
4.00
s.ü0
4,00
-8.0ü
-12.00
-16,00
-20.üo
Simulación
-0.s08 -0.ü04 0,000 0,004 0,0üE
Shear strain
Figuras 7. Ensayo de fatiga isotérmica a cortante a una rata de deformación de 1,67x10-4y a temperatura ambiente para ISR=0,004
0.50
o-40
Modelo
0-go
0¿o
0"10
0-0{I0 1000fi1 200000
Tlme30üffi0
l-goEEfiCLoEDfiÉLrEü
i
s0l
I 't'ltlll
-----F----+tltlt¡
I
-----t-----I
III
IIt-II
I
¡
I¡-¡
I
_t_ _ _ __I
II
t-I
I
i .f-----i--------t lf I I I
_.{--L ----!----tJrrrlt¡,,lll
Í:::fi iiLfl¡ll
li:i:rllltlll¡ll¡
- - - - -L - - - - -I - - - - r - - -tllltllltlllrllltlll,t,t,l,l
Figuras 8. Evolución del parámetro de daño en fatiga para un ISR=0,004
Revista EIA