tesis - biblioteca.itson.mxbiblioteca.itson.mx/dac_new/tesis/418_navarro_jesus.pdf · tesis que...
TRANSCRIPT
CONTROL DIGITAL PI DE UN CONVERTIDOR
PUSH-PULL UTILIZADO COMO FUENTE DE
ALIMENTACION CONMUTADA PARA
APLICACIONES FOTOVOLTAICAS.
INSTITUTO TECNOLÓGICO DE SONORA
TESIS
QUE PARA OBTENER EL TÍTULO DE
CD. OBREGÓN, SONORA NOVIEMBRE DE 2009
JESÚS IVÁN NAVARRO FIGUEROA
INGENIERO EN ELECTRÓNICA
PRESENTA:

iii
A Dios,
a mis padres Jesús Navarro y Lidia Figueroa,
a mi hermana Annie Navarro,
y a mi novia Elizabeth Beltrán.
iv
AGRADECIMIENTOS
A mis padres Jesús Navarro y Lidia Figueroa por su confianza y apoyo incondicional que
he recibido durante toda mi vida. Sin ustedes me sería muy difícil ser la persona que
ahora soy.
A mi Hermana Annie Navarro por brindarme su amistad y confianza durante la
realización de esta tesis.
A mis amigos Ricardo Valenzuela, Aurelio Rodríguez, Emmanuel Amarrillas, Omar Baca,
por su sincera amistad y compartir todos sus conocimientos y experiencias conmigo
siendo cada uno de ellos pieza fundamental para el desarrollo de esta tesis.
A mi novia Elizabeth Beltrán por creer en mí, y estar a mi lado en todo momento. Por tu
amor y paciencia te estaré eternamente agradecido.
Un especial agradecimiento al Dr. José Antonio Beristáin Jiménez por guiarme y
compartir su conocimiento durante el desarrollo de esta tesis. Por su paciencia y
consejos, ¡gracias!
Al Dr. Armando Ambrosio, al zzzal MC. Adolfo Espinoza por sus comentarios y
colaboración en este trabajo. ¡Gracias!
Jesús Iván Navarro Figueroa
v
RESUMEN
En este documento se presenta el desarrollo de un controlador digital PI para un
convertidor push-pull utilizado como fuente de alimentación para aplicaciones
fotovoltaicas. En primer lugar se expone la importancia de las energías renovables
enfatizando la energía solar como una de las principales fuente de energía y la
necesidad de crear estrategias eficientes de trasformación de energía con la finalidad
de un mejor aprovechamiento. Se realiza el análisis y diseño de un convertidor push-
pull exponiendo cada una de las partes que lo integran. Se describe cada etapa
como lo son; el filtrado, sensado del voltaje y adecuación de la señal. Después se
analiza detalladamente y se diseña el algoritmo de control PI implementado en un
controlador digital de señales (DSC). Se examina cada una de las funciones que
integra al algoritmo como lo son; el muestreo de la señal, el filtrado digital, despliegue
de la señal sensada y el control. Se presenta el código fuente en lenguaje C y el
diagrama esquemático de cada parte del sistema implementado con la finalidad de
que se pueda reproducir este proyecto.
Para comprobar el correcto funcionamiento de cada una de las partes que integra al
sistema se realizaron una serie de pruebas en lazo abierto y en lazo cerrado con el
objetivo de obtener su comportamiento.
vi
El trabajo se divide en 4 capítulos:
En capítulo I plantea la necesidad de utilizar nuevas fuentes de energía enfatizando
la energía solar como una de las principales fuentes de energía renovables. Se
presenta la problemática del proyecto, los objetivos que se requieren alcanzar con la
culminación de este proyecto, así como la justificación del mismo.
En el capítulo II se fundamenta teóricamente los métodos relacionados para el
desarrollo de esta tesis, la investigación bibliográfica referente a los convertidores de
potencia, la clasificación entre convertidores conmutados aislados y no aislados. Se
describe la técnica de control digital, se realiza un análisis del funcionamiento de un
algoritmo PI enfatizando ventajas y desventajas. También se hace una descripción
de las características principales del microcontrolador todo con el objetivo de aclarar
todos los términos empleado durante el desarrollo de esta tesis.
En el capítulo III se describen los procedimientos seguidos para el desarrollo de esta
tesis. Se detalla cómo fueron diseñadas cada una de las partes que integran al
convertidor push-pull, se da una descripción detallada acerca de la implementación
de un lazo cerrado en el convertidor push-pull utilizando como plataforma un
microcontrolador y se describe el algoritmo de control PI implementado.
En el capítulo IV se presentan las pruebas realizadas en lazo abierto al convertidor
push-pull y las pruebas en lazo cerrado del controlador PI exhibiendo la respuesta
del control a variaciones de carga.
Por último, se presentan las conclusiones sobre el desarrollo de esta tesis y
recomendaciones para posibles mejoras en trabajos relacionados a sistemas de
control en fuentes de alimentación conmutada.
vii
ÍNDICE
Página
LISTA DE FIGURAS………………………………………………………. xi
LISTA DE TABLAS………………………………………………………… xv
LISTA DE ACRÓNIMOS Y ABREVIATURAS………………………………… xvi
CAPÍTULO I. Introducción
1.1 Marco de referencia………………………………………………….… 3
1.2 Planteamiento del problema……………………...………………….. 4
1.3 Objetivo…………………………………...……………………………... 5
1.4 Justificación…………………………………...………………………… 5
1.5 Delimitaciones…………………………...……………………………… 5
Referencias………………………………………………………………….. 7
CAPÍTULO II. Marco teórico
2.1 Fuentes de alimentación………………….……..…………..………… 9
2.1.1 Fuentes de alimentación de corriente alterna……………. 9
2.1.2 Fuentes de alimentación de corriente directa…………… 10
2.2 Fuentes de alimentación de corriente directa en modo conmutado 10
2.2.1 Fuentes de alimentación de corriente directa en
modo conmutado no aislado……………………………..…
12
2.2.2 Fuentes de alimentación de corriente directa en modo
conmutado aislado…………………………………………..
13
2.2.2.1 Convertidor push-pull………………………….. 14
2.3 Ventajas del convertidor CD-CD topología push-pull ó contrafase 19
2.4 Maquina eléctrica...……………………………………………………. 20
2.4.1 Campo magnético…………………………………………… 21
2.4.2 Circuito magnético…………………………………………… 22
2.4.3 Pérdidas de energía en un núcleo ferromagnético………. 24
viii
2.5 Transformador…………………………………………………………. 26
2.5.1 Clasificación………………………………………………….. 26
2.5.2 Relación de transformación………...………………...…... 28
2.6 Filtro LC………………………………………………...…………….... 29
2.7 Filtro FIR……………………………………………………………….. 30
2.8 Control digital………………………………………………………….. 32
2.8.1 Control proporcional-integral (PI)……………………….. 35
2.9 Controlador digital de señales……………………………………… 39
2.9.1 dsPIC30f2020………………………………………………… 40
2.9.2 MPLAB IDE………………………………………………….. 41
2.9.3 Lenguaje C……………………………………………………. 41
Referencias……………………………………………...…………………... 42
CAPÍTULO III. Desarrollo
3.1 Requerimientos…………..…………………………………………….. 46
3.2 Descripción del sistema…………………….………………………… 46
3.3 Implementación………………………………………………………… 48
3.4 Etapa de potencia……………………………………………………… 48
3.4.1 Convertidor CD-CD topología push-pull………………… 48
3.4.1.1 Diseño del convertidor CD-CD topología push-
pull………………………………………………….
49
3.4.1.2 Implementación del convertidor CD-CD
topología push-pull………………………………..
51
3.4.2 Transformador……………….………….............................. 52
3.4.2.1 Diseño del transformador……………………… 53
3.4.3 Reducción del ruido en el convertidor push-pull……….. 56
3.4.3.1 Reducción de las inductancias dispersas……. 57
3.4.3.2 Implementación snubber RC en el convertidor. 57
3.4.4 Protección del convertidor a través del microcontrolador 59
3.4.5 Diseño del filtro LC………………………………………… 60
3.4.6 Sensado y adecuación en la señal de retroalimentación. 61
ix
3.4.6.1 Divisor resistivo………………………………….. 61
3.4.6.2 Acoplador de impedancias……………..………… 62
3.5 Etapa digital……………………………………..……………………. 63
3.5.1 Elección del dispositivo a utilizar…………………………... 63
3.5.2 Elección del lenguaje de programación a utilizar………... 64
3.5.3 Elección del software y el compilador elegido……………. 64
3.5.4 Desarrollo del programa……………………………............ 64
3.5.4.1 Nomenclatura de funciones, variables y
constantes………………………………………...
65
3.5.4.2 Ejecución del programa en general…………….. 66
3.5.4.3 Declaración de constantes y variables…………. 67
3.5.4.4 Funciones prototipo………………………………. 67
3.5.4.5 Programa principal………………………………... 68
3.5.4.6 Configuración de puertos………………………… 69
3.5.4.7 Inicialización del LCD…………………………….. 70
3.5.4.8 Configuración del módulo ADC………………..... 72
3.5.4.9 Configuración de temporizadores………………. 73
3.5.4.10 Configuración de interrupciones…………….… 74
3.5.4.11 Configuración del módulo PWM……………… 74
3.5.4.12 Inicialización soft-start………………………… 75
3.5.4.13 Habilitación de interrupciones, ADC,
temporizador 2 y 3……………………….............
76
3.5.4.14 Espera actualización LCD………………………. 76
3.5.4.15 Rutina de servicio a la interrupción
ISR_TIMER2………………………………………
77
3.5.4.16 Función FILTROFIR………………………...…… 78
3.5.4.17 Rutina de servicio a la interrupción TIMER 3…. 79
3.5.4.18 Método de sintonización PI……………………... 83
3.5.4.19 Eliminación sobreimpulso en el encendido……. 84
3.5.4.14 Implementación del circuito del DSC…………. 84
Referencias………………………………………………………………….. 86
x
CAPÍTULO IV. Pruebas y resultados
4.1 Pruebas del sistema en lazo abierto……………………...……........ 90
4.1.1 Pruebas de señalización……………………………..…… 90
4.1.2 Análisis del convertidor………………................................ 91
4.1.3 Pruebas a los circuitos de protección…………………..…. 98
4.1.4 Pruebas de protección a través del microcontrolador…. 101
4.1.5 Prueba eficiencia a diferentes frecuencias de
conmutación…………………………………………….....
102
4.2 Prueba del sistema en lazo cerrado………………………………... 103
4.2.1 Pruebas eliminación sobreimpulso…………..…................ 105
4.2.2 Pruebas del sistema con cambios de carga…………….... 108
Conclusiones y recomendaciones……………………………………………... 112
BIBLIOGRAFÍA……………………………...…………………………………………. 115
APÉNDICES
Apéndice A: Código fuente del programa para la implementación del
algoritmo de control filtrado y despliegue de la señal…………………………...
119
Apéndice B: Diagrama esquemático del sistema implementado (PCB)……… 123
Apéndice A: Coeficientes filtro FIR……………………………………………….. 125
ANEXO
Anexo 1: Hoja de especificaciones del controlador digital de señales……….. 128
Anexo 2: Hoja de especificaciones del transistor IRFP150N…………..……… 132
xi
LISTA DE FIGURAS
Página
Figura 2.1 Arreglo básico de un sistema interconectado a la red……………. 12
Figura 2.2 Topologías básicas de convertidores CD-CD no aislados……….. 13
Figura 2.3 Convertidor push-pull…………………………………...………........ 15
Figura 2.4 Circuito equivalente cuando no conduce 1Q y 2Q ………………… 18
Figura 2.5 Circuito equivalente cuando conduce 1Q o 2Q ……………………. 19
Figura 2.6 Circuito eléctrico………………………………………………………. 23
Figura 2.7 Circuito magnético análogo al núcleo de un transformador……… 23
Figura 2.8 Curva o lazo de histéresis trazado por el flujo en un núcleo
cuando se aplica una corriente …………………………………......
25
Figura 2.9 Transformador monofásico con el secundario en circuito abierto. 27
Figura 2.10 Diagrama general de convertidor con el filtro LC………….………. 30
Figura 2.11 Estructura básica de un filtro FIR……………………………………. 32
Figura 2.12 Diagrama a bloques de un sistema de control digital…………….. 33
Figura 2.13 Diagrama de un controlador PI ………………..……………………. 35
Figura 2.14 Características de un controlador proporcional…………….…....... 36
Figura 2.15 Área bajo la curva controlador integral……………………………… 38
Figura 2.16 Diagrama de pines del dsPIC30F2020 empaquetado SPDIP……. 40
Figura 3.1 Diagrama general del sistema……………………………………….. 47
Figura 3.2 Diagrama de la fuente push-pull........,............................................ 49
Figura 3.3 Implementación de la parte de potencia en la placa del circuito
Impreso………………………………………………………………….
52
Figura 3.4 Diagrama de conexión capacitores 1C y 2C ……………………….. 57
Figura 3.5 Implementación snubbers RC en el convertidor push-pull……….. 58
Figura 3.6 Diagrama de conexión entre el PIN RE6 y el driver………………. 59
Figura 3.7 Implementación del filtro LC…………………………………………. 60
Figura 3.8 Diagrama del divisor resistivo………………………………………... 62
Figura 3.9 Configuración seguidor de voltaje…………………………………… 62
xii
Figura 3.10 Nomenclatura de variables y constantes…………………………… 65
Figura 3.11 Ejemplo de nomenclatura de variables y constantes……………... 65
Figura 3.12 Nomenclatura de funciones………………………………………….. 66
Figura 3.13 Ejemplo de nomenclatura de funciones…………………………….. 66
Figura 3.14 Código de declaración de constantes y variables…………………. 67
Figura 3.15 Código de declaración de funciones………………………………… 68
Figura 3.16 Diagrama de flujo programa principal………………………………. 69
Figura 3.17 Diagrama de flujo de inicialización del LCD………………………... 71
Figura 3.18 Diagrama de flujo de la función LCD_SendDato…………………... 71
Figura 3.19 Diagrama de flujo de la función LCD_SendNibble………………… 71
Figura 3.20 Código de configuración del modo de disparo del ADC………….. 72
Figura 3.21 Esquema de suministro de datos……………………………………. 73
Figura 3.22 Diagrama de flujo de la función SOFTSTAR_Int…………………... 75
Figura 3.23 Código de habitación de módulos ADC, TIMER 2 y 3………......... 76
Figura 3.24 Diagrama de flujo de la rutina de servicio en la interrupción timer
2………………………………………………………………………….
77
Figura 3.25 Diagrama de flujo de la función FILTROFIR…………………….… 79
Figura 3.26 Diagrama de flujo de la rutina de servicio en la interrupción timer
3………………………………………………………………………….
80
Figura 3.27 Cálculo del error en la rutina control………………………………… 81
Figura 3.28 Cálculo del valor proporcional en la rutina control………………… 81
Figura 3.29 Cálculo del valor integral en la rutina de control…………………… 82
Figura 3.30 Cálculo de la suma del valor proporcional e integral……………… 83
Figura 3.31 Implementación física del microcontrolador y LCD………………... 84
Figura 3.32 Implementación de la parte digital del proyecto en la placa del
circuito impreso………………………………………………………...
85
Figura 4.1 Puntos dsV y gsV del convertidor push-pull…………………………. 90
Figura 4.2 Formas de onda presentes en gsV ………………………………….. 91
Figura 4.3 Forma de ondas presentes en dsV y gsV de los transistores 1Q y
xiii
2Q ……………………………………………………………………….. 92
Figura 4.4 Forma de ondas presentes en dsV y gsV de los transistores 1Q y
2Q con una menor escala de tiempo………………………………...
93
Figura 4.5 Formas de onda presentes en gsV e dI
del transistor 1Q ……… 94
Figura 4.6 Formas de onda de voltaje presente en el secundario del
transformador y señales dsV de los transistores 1Q y 2Q ………….
96
Figura 4.7 Voltaje en el devanado secundario del transformador……………. 97
Figura 4.8 Formas de onda del voltaje en la salida del rectificador………….. 97
Figura 4.9 Voltaje de salida del filtro LC………………………………………… 98
Figura 4.10 Picos de voltaje presentes en dsV sin circuitos de protección……. 99
Figura 4.11 Oscilaciones presentes en dsV sin circuitos de protección……….. 100
Figura 4.12 Formas de onda presente en dsV de los transistores 1Q y 2Q
circuitos de protección………………………………………………... 100
Figura 4.13 Señal de habitación de bloqueo para el driver y disparos de los
transistores…………………………………………………………….. 101
Figura 4.14 Voltaje de salida del convertidor en lazo cerrado………………….. 104
Figura 4.15 Tiempo de estabilización del control PI…………………………….. 104
Figura 4.16 Amplitud del sobreimpulso en la estabilización del control PI……. 105
Figura 4.17 Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=0… 106
Figura 4.18 Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo =
1200…………………………………………………………………….. 106
Figura 4.19 Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo =
1800…………………………………………………………………….. 107
Figura 4.20 Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo =
2000…………………………………………………………………….. 107
Figura 4.21 Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo =
2200…………………………………………………………………….. 107
Figura 4.22 Tiempo de estabilización cambio de carga 300 a 130 Ω…………. 108
xiv
Figura 4.23 Sobreimpulso cambio de carga 300 a 130Ω……………………….. 108
Figura 4.24 Sobreimpulso cambio de carga 130 a 300 Ω………………………. 109
Figura 4.25 Tiempo de estabilización cambio de carga 130 a 300 Ω…………. 109
Figura 4.26 Sobreimpulso cambio de carga 550 a 130 Ω………………………. 110
Figura 4.27 Tiempo de estabilización cambio de carga 550 a 130 Ω…………. 110
Figura 4.28 Sobreimpulso cambio de carga 130 a 550 Ω………………………. 110
Figura 4.29 Tiempo de estabilización cambio de carga 130 a 550 Ω…………. 110
xv
LISTA DE TABLAS
Página
Tabla 4.1 Eficiencia del convertidor con diferentes frecuencias…………. 103
Tabla 4.1 Pruebas de sobreimpulso…………………………………………. 105
xvi
LISTA DE ACRÓNIMOS Y ABREVIATURAS
CD Corriente directa
CA Corriente alterna
DSC Controlador Digital de Señales (Digital Signal Controller)
ADC Convertidor análogo a digital (Analog to Digital Converter)
PLL Ciclo de amarre de fase (Phase Locked Loop)
PWM Modulación por ancho de pulso (Pulse Width Modulation)
SPWM Modulación por ancho de pulso senoidal (Sinusoidal Pulse Width
Modulation)
MSPS Millones de muestras por segundo (Millions of Samples Per
Second)
MIPS Millones de instrucciones por segundo (Millions of Instructions Per
Second)
PV Fotovoltaico (Photovoltaic)
MOSFET Transistor de efecto de campo de semiconductor Metal-Óxido
(Metal-Oxid semiconductor field effect transistor)
CAPÍTULO I
Introducción
En la actualidad hablar de fuentes de energía conlleva a pensar en dos caminos
diferentes. Fuentes de energías renovables y fuentes de energías no renovables. Las
energías no renovables son todas aquellas que se encuentran en la naturaleza en
una cantidad limitada y que una vez consumidas no pueden sustituirse teniendo
como principal desventaja la contaminación y el agotamiento de sus reservas a corto
o mediano plazo. En cambio las energía renovables son aquellas que se obtienen de
fuentes naturales virtualmente inagotables por tal motivo las energías renovables
surgen como una de las fuentes mas factibles en los últimos años debido a la
inmensa cantidad de energía que contienen y ser capaces de regenerarse por
medios naturales.
Las principales fuentes de energías renovables se pueden dividir en energía solar,
energía eólica, energía geotérmica, energía hidráulica. La energía solar que es la
CAPÍTULO I. Introducción. 2
plataforma del objetivo de esta tesis se define como la energía obtenida mediante la
captación de la luz y el calor emitidos por el sol.
Los sistemas fotovoltaicos son una de las principales maneras de producción de
energía solar debido al efecto fotoeléctrico que consiste en la emisión de electrones
por un material cuando se le ilumina con radiación electromagnética.
Con el objetivo de manipular la energía proveniente de los paneles solares se hace
uso de la electrónica de potencia a través de convertidores de potencia que su
principal función es convertir una forma de energía en otra.
En los sistemas fotovoltaicos es necesario adecuar las características de la energía
generada a los requerimientos deseados en voltaje y corriente. Para ello se usan
convertidores de potencia los cuales pueden ser clasificados de la siguiente manera:
1. Rectificadores de diodos.
2. Convertidores CA-CD.
3. Convertidores CA-CA.
4. Convertidores CD-CA.
5. Convertidores CD-CD.
Al implementar sistemas fotovoltaicos se requiere convertir una fuente de corriente
directa de voltaje fijo, a una fuente de corriente directa de voltaje variable, usando
convertidores CD-CD para lograr manipular las características deseadas de salida.
Los principales convertidores aislados CD-CD pueden ser clasificados de la siguiente
manera:
1. Convertidor CD-CD flyback.
2. Convertidor CD-CD forward.
3. Convertidor CD-CD push-pull.
4. Convertidor medio puente y puente completo.
Para manejar las características deseadas como lo son la potencia de salida, la
carga máxima y mínima del convertidor es necesario utilizar un control eficiente con
una respuesta apta al sistema a controlar.
CAPÍTULO I. Introducción. 3
Uno de los principales controles usados en convertidores de potencia son los
controladores PID (proporcional, intergrativo, derivativo) que son un mecanismo de
control por retroalimentación de la señal. Corrigiendo el error entre un valor medido y
el valor que se quiere obtener calculándolo y luego sacando una acción de ajuste al
proceso.
Es necesaria la implementación de este tipo de control en convertidores CD-CD para
lograr un sistema eficiente y con una respuesta rápida con relación a la velocidad del
convertidor en estado dinámico.
1.1 Marco de referencia
La sociedad requiere de satisfactores de necesidades en las cuales se ha de invertir
cierta cantidad de energía para su elaboración. Por tal motivo se tiene la necesidad
de generar un desarrollo energético adecuado convirtiéndose en uno de los
principales problemas para los países desarrollados y subdesarrollados.
Es por esto que algunos países como Japón, Alemania, España y Estados unidos
tienen la necesidad de invertir y general nuevas fuentes de producción de energía.
En México el desarrollo de energía solar es un área de investigación relativamente
nueva donde algunas instituciones y organismos privados incursionan en este ámbito
debido principalmente a la necesidad de mejorar la calidad de vida de la sociedad.
Una de las principales empresas gubernamentales que tiene como objetivo
salvaguardar el patrimonio cultural de los mexicanos es la comisión federal de
electricidad (CFE) la cual cuenta con un área de investigación de energías
renovables promoviendo el aprovechamiento de fuentes de energía a través de la
puesta en marcha de proyectos eólicos, geotérmicos y solares en el país [1].
Una de las más importantes instituciones en México que impulsan al desarrollo de
energías renovables es la asociación nacional de energía solar (ANES) que tiene
como principal objetivo promover el uso de energía solar, cuidar la calidad del
desarrollo científico en energías renovables en México. Pertenece a la sociedad
internacional de energías renovables (ISES) por sus siglas en ingles, presente en
más de 50 países [2].
CAPÍTULO I. Introducción. 4
De los principales centros investigación en México, el centro de investigación de
estudios avanzados del IPN (CINVESTAV-IPN) en la sección de electrónica del
estado sólido tiene como objetivo desarrollar proyectos para la investigación de
generación de energías renovables mediante sistemas fotovoltaicos. Cuenta con una
planta de generación de energía solar capaz de producir 24,000 W anuales [3].
El instituto tecnológico de sonora (ITSON) cuenta con 5 paneles solares con
capacidad de 100 W cada uno. Instalados con el objetivo de desarrollar proyectos
relacionados a la generación de energías renovables. Se han desarrollado proyectos
de seguimiento del máximo punto de potencia en paneles solares así como
aportaciones al desarrollo de sistemas fotovoltaicos interconectados [4] y [5].
1.2 Planteamiento del problema
México siendo un país dependiente de tecnología tiene la necesidad de generar su
propia tecnología para poder aprovechar al máximo los recursos naturales que se
encuentran en el país.
En ciudad Obregón, Sonora se recibe una insolación anual de 6.5 kWh/m 2
convirtiéndola en la región con mayor insolación del estado [4].
Es por esto que la necesidad de generación de nuevas tecnologías resulta factible
para la sociedad debido a los recursos naturales que se tienen.
Así mismos es necesario aprovechar los conocimiento obtenidos para la realización
de proyectos con el objetivo de impulsar el desarrollo de tecnología en México.
Uno de las principales formas de generar energía es por medio de paneles solares a
través del efecto fotoeléctrico surgiendo como una prioridad desarrollar dispositivos
con el objetivo de manipular las características de salida de los paneles fotovoltaicos
para poder darles una aplicación especifica dependiendo de las necesidades que se
presenten.
CAPÍTULO I. Introducción. 5
1.3 Objetivos
1. Implementar un convertidor para aplicaciones fotovoltaicas obteniendo su
máxima eficiencia posible y diseñar un controlador consiguiendo la mejor respuesta
posible en estado dinámico.
1.1 Investigar los diferentes tipos de convertidores CD-CD para decidir cual
se implementará de acuerdo a las características y necesidades del
sistema.
1.2 Investigar métodos de control y seleccionar el que mejor se adapte al
sistema a controlar.
2. Implementar el convertidor CD-CD elegido obteniendo su máxima eficiencia
posible a lazo abierto.
3. Implementar la técnica de control seleccionada diseñada para obtener la mejor
respuesta posible en estado dinámico.
4. Realizar pruebas a lazo cerrado verificando su eficiencia y respuesta del
control.
1.4 Justificación
En los paneles fotovoltaicos se encuentra una eficiencia máxima entre el 15 y 20%
,es por esto que la importancia de general sistemas eficientes para la obtención y
manipulación de las características de la energía generada es fundamental, así
mismo es importante incursionar en sistemas de convertidores CD-CD que aporten a
la investigación de convertidores controlados para hacer un mejor uso de las
tecnologías presentes y de los sistemas diseñados para la obtención de energía.
1.5 Delimitaciones
CAPÍTULO I. Introducción. 6
Para este proyecto solo se realizará la implementación de un convertidor CD-CD y el
diseño de un controlador. La potencia máxima de salida del convertidor se estableció
en 222 W a una carga máxima. El convertidor está diseñado para una carga
máxima 130 Ω manteniendo el voltaje deseado de 170 volts.
El voltaje de entrada del convertidor se estableció a 24 volts de CD utilizando dos
baterías de 12 volts en serie.
El convertidor CD-CD está basado en la topología push-pull y el controlador se basa
en un algoritmo PI diseñado en un microcontrolador que genera la señal de control
para el convertidor CD-CD.
Es sistema será probado en lazo abierto con el fin de obtener una comparación entre
los dispositivos a usar con el objetivo de mejorar su eficiencia.
El sistema final será probado a lazo cerrado con el fin de observar su respuesta en
estado dinámico y obtener los tiempos de estabilización del sistema, así como su
máximo sobre impulso y observar las señales de control.
La implementación final del sistema se realizará en una placa de circuito impreso,
donde se añadirán las diversas partes del sistema final, tanto la etapa de potencia
del convertidor CD-CD, así como las etapas digitales, las etapas de aislamiento y de
acoplamiento.
CAPÍTULO I. Introducción. 7
Referencias
[1] CFE, Comisión federal de electricidad, (página Web) http://www.cfe.gob.mx,
consultada en junio de 2009.
[2] ISES, the International solar energy society, (página Web)
http://www.ises.org, consultada en junio de 2009 [2]
[3] CINVESTAV, Especialidad de Electrónica del Estado Sólido, (Página Web),
http://www.sees.cinvestav.mx/, Consultada en junio de 2009.
[4] PEÑUELAS Machado José Ángel, “Algoritmo de Seguimiento del Máximo
Punto de Potencia para Sistemas Fotovoltaicos en Cd. Obregón, Sonora”,
Tesis de Ingeniero en Electrónica, Instituto Tecnológico de Sonora, Cd.
Obregón, Sonora, Octubre de 2008.
[5] ANGULO Guzmán Sara Yael, “Aportación al desarrollo de un inversor
monofásico para sistemas fotovoltaicos interconectados con énfasis en una
técnica de control lineal”, Tesis de Ingeniero en Electrónica, Instituto
Tecnológico de Sonora, Cd. Obregón, Sonora, Mayo de 2009.
CAPÍTULO II
Marco teórico
En este capítulo se fundamenta teóricamente los métodos utilizados para el
desarrollo de esta tesis. Inicialmente se definen y clasifican las fuentes de
alimentación, particularmente las fuentes de alimentación de corriente directa en
modo conmutado. Se hace una clasificación de las fuentes en modo conmutado
enfatizando en el convertidor push-pull exponiendo su funcionamiento y ventajas
contra los diversos tipos de convertidores.
Posteriormente se da una breve explicación de las diferencias que existen entre un
circuito magnético y un circuito eléctrico todo esto con el objetivo de aclarar el
funcionamiento de un transformador ya que forma parte importante en la fuente
push–pull. Proporcionando una descripción breve del tipo de pérdidas que se pueden
presentar en un transformador y explicando la relación de transformación necesaria
para implementarlo.
A continuación se expone el análisis de un filtro FIR y un filtro LC utilizado en el
presente proyecto. En seguida se define lo que es un control digital y los tipos de
controles que existen. Enfatizando en el control proporcional integral PI exponiendo
su funcionamiento, ventajas y desventajas en contra de los diversos tipos de
controles mencionados.
Finalmente se hace referencia al tipo de microcontrolador utilizado y al tipo de
lenguaje elegido para programar el microcontrolador.
CAPÍTULO II. Marco teórico 9
2.1 Fuentes de alimentación.
Se entiende por fuente de alimentación un sistema electrónico que suministra las
tensiones y corrientes necesarias para el funcionamiento de circuitos electrónicos.
Por lo tanto las fuentes de alimentación son sistemas suministradores de energía
eléctrica.
Los sistemas electrónicos modernos requieren de eficientes fuentes de alimentación,
que sean pequeños, confiables, de peso ligero, y que proporcionen una alta calidad
en la señal [1].
Las fuentes de alimentación deben satisfacer con frecuencia todas o la mayor parte
de las especificaciones siguientes [2]:
Aislamiento entre la fuente y la carga.
Alta densidad de potencia para reducción del tamaño y peso.
Dirección controlada del flujo de potencia.
Alta eficiencia de conversión.
Forma de onda entre la entrada y la salida con poca distorsión armónica total,
para que los filtros sean pequeños.
Factor de potencia (FP) controlado, si la fuente es un voltaje de CA.
A partir del voltaje de salida las fuentes de alimentación se pueden clasificar en dos
tipos [2]:
1. Fuente de alimentación de corriente alterna.
2. Fuente de alimentación de corriente directa.
2.1.1 Fuente de alimentación de corriente alterna.
Las fuentes de alimentación de corriente alterna son de uso común como fuentes
para cargas críticas y en aplicaciones donde no está disponible el suministro normal
de corriente alterna [1]. Las fuentes de alimentación de corriente alterna se pueden
clasificar en tres tipos:
1. Fuente de alimentación de CA en modo conmutado.
2. Fuente de alimentación de CA resonantes.
CAPÍTULO II. Marco teórico 10
3. Fuente de alimentación de CA bidireccionales.
2.1.2 Fuente de alimentación de corriente directa.
Las fuentes de alimentación de corriente directa CD emplean procesos de
rectificación y filtrado como medios para obtener un voltaje continúo de CD. La fuente
de alimentación de CD convierte un voltaje que varia en el tiempo (como podría ser
el voltaje de entrada de un transformador) a otro de magnitud fija.
En otras palabras una fuente de voltaje de CD idealmente proporcionará un voltaje
terminal fijo, incluso cuando la demanda de corriente de un sistema
eléctrico/electrónico pueda variar [19].
En la práctica las fuentes de alimentación usan conversiones de dos etapas, CD -CA
y CA-CD. En el caso que la entrada sea CA se usan conversiones de tres etapas,
CA-CD, CD-CA y CA-CD. El aislamiento se obtiene con un trasformador entre
etapas.
Las fuentes de alimentación de acuerdo con el tipo de técnicas de conversión y la
dirección del control de potencia se pueden subdividir en 3 tipos al igual que las
fuentes de CA. [2]:
1. Fuente de alimentación en modo conmutado.
2. Fuente de alimentaciones resonantes.
3. Fuente de alimentaciones bidireccionales.
2.2 Fuentes de alimentación de corriente directa en modo
conmutado.
Las fuentes de alimentación en modo conmutado que son la base del objetivo de
este proyecto se usan frecuentemente en sistemas cuyo propósito es generar niveles
de tensión en base a las características deseadas de salida en un sistema.
Los convertidores conmutados han sido muy populares en las últimas tres décadas y
son ampliamente usados en todos los niveles de potencia.
Las ventajas de los convertidores conmutados incluyen: bajo número de
componentes, alta eficiencia, una constante frecuencia de operación, un control
CAPÍTULO II. Marco teórico 11
relativamente simple, capacidad de alcanzar altos índices de conversión, entre otras
[1].
Dentro de las principales desventajas en los convertidores conmutados se
encuentran las pérdidas de conmutación causadas por el cambio de estados de los
dispositivos semiconductores.
Las principales funciones de los convertidores CD-CD en modo conmutado son las
siguientes [1]:
El convertir un voltaje de corriente directa iV a un voltaje de corriente
directa de salida OV .
Regular el voltaje de salida de corriente directa contra variaciones de
carga o variaciones de línea.
Reducir el rizo de voltaje de corriente alterna en la salida de corriente
directa a niveles por debajo del requerido.
Proveer el aislamiento entre la fuente de entrada y la carga (aislamiento
no es siempre necesario).
Proteger al sistema de alimentación y a la fuente de entrada de
interferencia electromagnética.
Los sistemas de alimentación de CD en modo conmutado tienen una amplia
aplicación en técnicas donde se necesita modificar la potencia de salida como lo son:
sistemas de seguimiento de máximo punto de potencia [3], inversores monofásicos
para sistemas interconectados [4], entre otros. Es decir son sistemas que se usan
con el objetivo de controlar las características de salida en métodos de obtención de
energía a partir de generadores eléctricos como lo son: paneles solares, generadores
eólicos, generadores hidráulicos, etc.
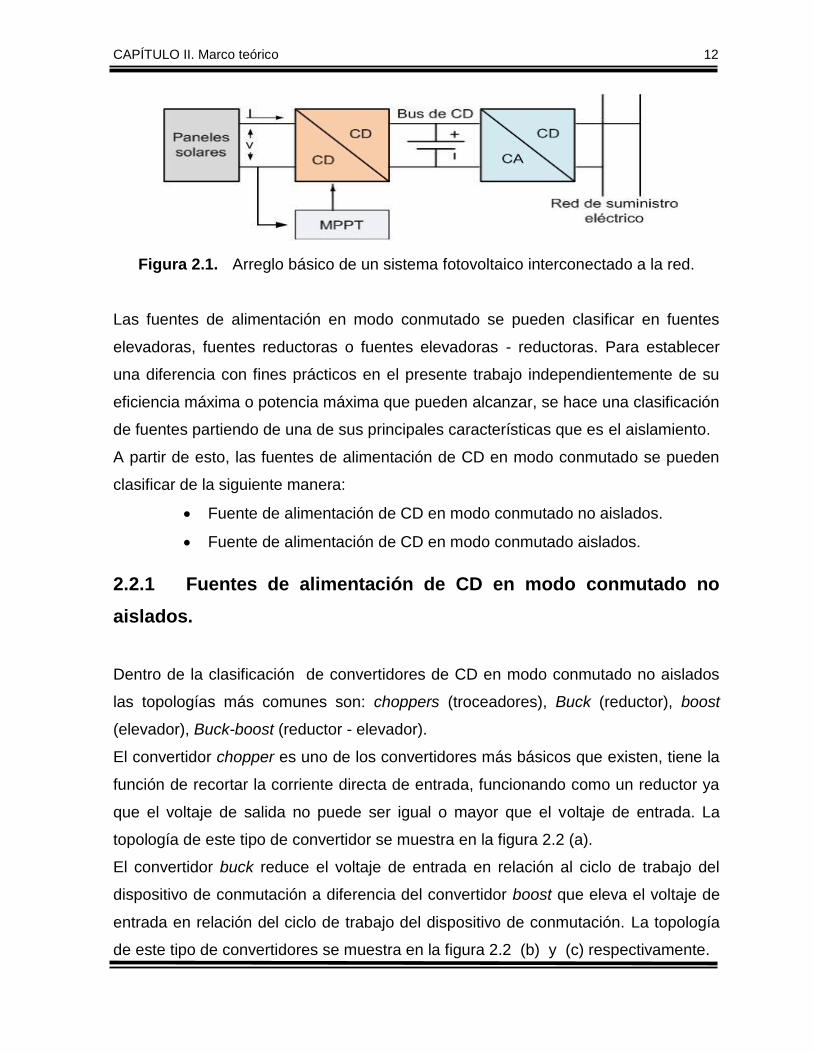
La figura 2.1 muestra un arreglo básico de un sistema fotovoltaico interconectado a la
red.
En el sistema de la figura 2.1 es común encontrar convertidores CD-CD alimentados
por medio de paneles solares. Los convertidores CD-CD tiene la función de adecuar
las características de tensión deseadas de salida para la alimentación de inversores
que son los encargados de convertir un voltaje de CD a CA.
CAPÍTULO II. Marco teórico 12
Figura 2.1. Arreglo básico de un sistema fotovoltaico interconectado a la red.
Las fuentes de alimentación en modo conmutado se pueden clasificar en fuentes
elevadoras, fuentes reductoras o fuentes elevadoras - reductoras. Para establecer
una diferencia con fines prácticos en el presente trabajo independientemente de su
eficiencia máxima o potencia máxima que pueden alcanzar, se hace una clasificación
de fuentes partiendo de una de sus principales características que es el aislamiento.
A partir de esto, las fuentes de alimentación de CD en modo conmutado se pueden
clasificar de la siguiente manera:
Fuente de alimentación de CD en modo conmutado no aislados.
Fuente de alimentación de CD en modo conmutado aislados.
2.2.1 Fuentes de alimentación de CD en modo conmutado no
aislados.
Dentro de la clasificación de convertidores de CD en modo conmutado no aislados
las topologías más comunes son: choppers (troceadores), Buck (reductor), boost
(elevador), Buck-boost (reductor - elevador).
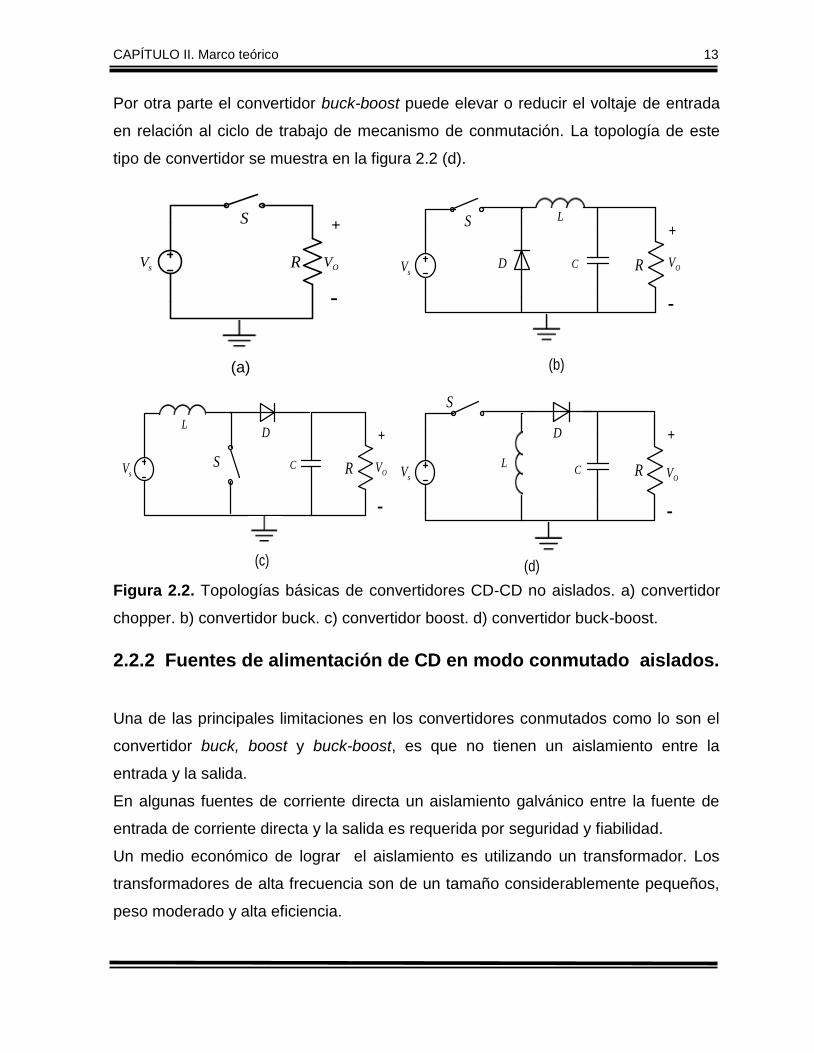
El convertidor chopper es uno de los convertidores más básicos que existen, tiene la
función de recortar la corriente directa de entrada, funcionando como un reductor ya
que el voltaje de salida no puede ser igual o mayor que el voltaje de entrada. La
topología de este tipo de convertidor se muestra en la figura 2.2 (a).
El convertidor buck reduce el voltaje de entrada en relación al ciclo de trabajo del
dispositivo de conmutación a diferencia del convertidor boost que eleva el voltaje de
entrada en relación del ciclo de trabajo del dispositivo de conmutación. La topología
de este tipo de convertidores se muestra en la figura 2.2 (b) y (c) respectivamente.
CAPÍTULO II. Marco teórico 13
Por otra parte el convertidor buck-boost puede elevar o reducir el voltaje de entrada
en relación al ciclo de trabajo de mecanismo de conmutación. La topología de este
tipo de convertidor se muestra en la figura 2.2 (d).
Figura 2.2. Topologías básicas de convertidores CD-CD no aislados. a) convertidor
chopper. b) convertidor buck. c) convertidor boost. d) convertidor buck-boost.
2.2.2 Fuentes de alimentación de CD en modo conmutado aislados.
Una de las principales limitaciones en los convertidores conmutados como lo son el
convertidor buck, boost y buck-boost, es que no tienen un aislamiento entre la
entrada y la salida.
En algunas fuentes de corriente directa un aislamiento galvánico entre la fuente de
entrada de corriente directa y la salida es requerida por seguridad y fiabilidad.
Un medio económico de lograr el aislamiento es utilizando un transformador. Los
transformadores de alta frecuencia son de un tamaño considerablemente pequeños,
peso moderado y alta eficiencia.
OVsV
+
-
R
S
(a)
L
+
-
D C
(b)
OVR
S
sV
+
-
sV S R OV
DL
C
(c)
+
-
(d)
sV
S
D
LC R
OV
CAPÍTULO II. Marco teórico 14
Además la relación del transformador respecto al número de vuelta de sus
devanados primarios y secundarios se pueden usar para ajustar el nivel de voltaje de
salida.
Los transformadores se utilizan comúnmente para proveer [5]:
El aislamiento entre las terminales de entrada y salida, según los
requisitos de seguridad.
Múltiples salidas de tensión distintas utilizando el transformador con
múltiples devanados secundarios.
La minimización del estrés de corriente y tensión cuando se utilizan
rangos de conversión grandes gracias a la relación de los devanados
primarios y secundarios.
Los más populares convertidores conmutados aislados son los siguientes [2]:
Convertidor flyback.
Convertidor forward.
Convertidor push-pull.
Convertidor puente completo.
Convertidor medio puente.
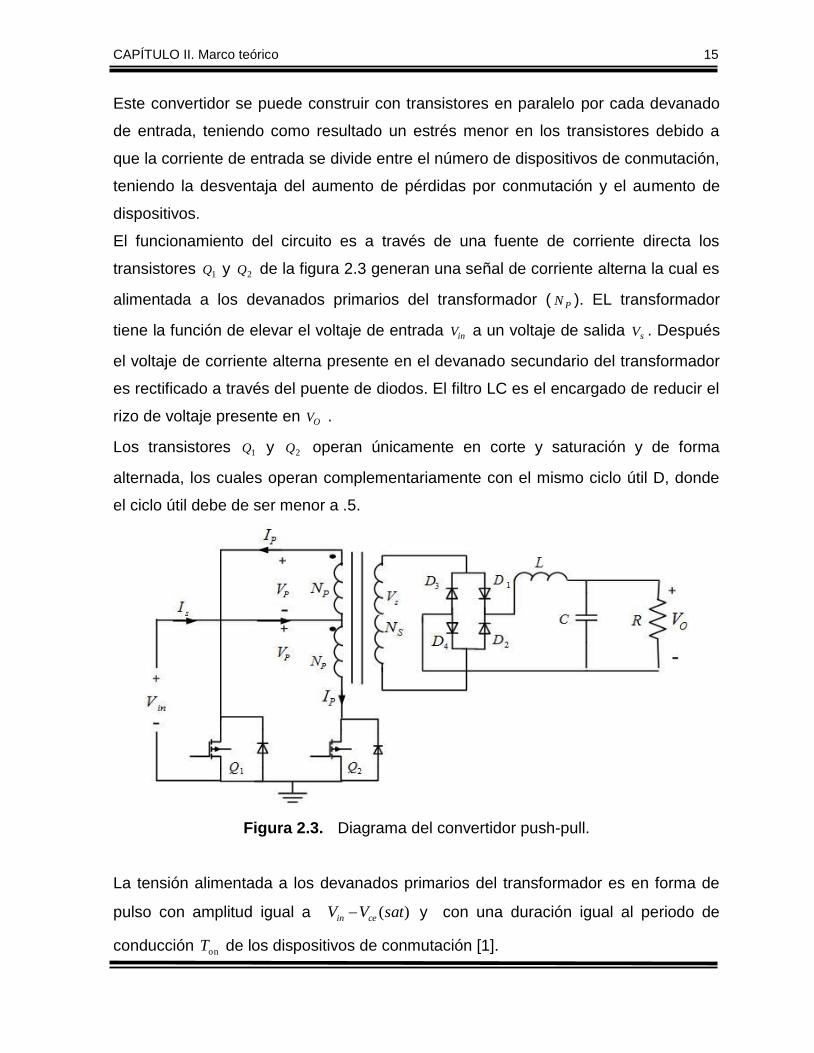
2.2.2.1 Convertidor push-pull.
El convertidor de CD a CD en contrafase (push-pull) se muestra en la figura 2.3. Es
una de las topologías más ampliamente usadas, debido a sus características de
funcionamiento surgen ventajas y desventajas que se expondrán a continuación.
Enfatizando en este convertidor sus principios de funcionamiento debido que es el
convertidor elegido a desarrollar exponiendo sus ventajas contra los convertidores
aislados.
Este convertidor entrega la potencia a la carga por medio de un trasformador, por lo
que las salidas de tensión están aisladas de las entradas. Lo que permite además
múltiples devanados secundarios y por lo tanto múltiples salidas de tensión. Donde la
tensión de salida puede ser más alta o baja de la tensión de entrada.
CAPÍTULO II. Marco teórico 15
Este convertidor se puede construir con transistores en paralelo por cada devanado
de entrada, teniendo como resultado un estrés menor en los transistores debido a
que la corriente de entrada se divide entre el número de dispositivos de conmutación,
teniendo la desventaja del aumento de pérdidas por conmutación y el aumento de
dispositivos.
El funcionamiento del circuito es a través de una fuente de corriente directa los
transistores 1Q y 2Q de la figura 2.3 generan una señal de corriente alterna la cual es
alimentada a los devanados primarios del transformador ( PN ). EL transformador
tiene la función de elevar el voltaje de entrada inV a un voltaje de salida sV . Después
el voltaje de corriente alterna presente en el devanado secundario del transformador
es rectificado a través del puente de diodos. El filtro LC es el encargado de reducir el
rizo de voltaje presente en OV .
Los transistores 1Q y 2Q operan únicamente en corte y saturación y de forma
alternada, los cuales operan complementariamente con el mismo ciclo útil D, donde
el ciclo útil debe de ser menor a .5.
Figura 2.3. Diagrama del convertidor push-pull.
La tensión alimentada a los devanados primarios del transformador es en forma de
pulso con amplitud igual a )(satVV cein y con una duración igual al periodo de
conducción onT de los dispositivos de conmutación [1].
CAPÍTULO II. Marco teórico 16
La ecuación (2.1) muestra la tensión ideal resultante en el devanado secundario del
transformador sin considerar pérdidas en el núcleo ni pérdidas de conmutación [5].
)()(S
Pceins
N
NVVV (2.1)
En donde:
sV = Voltaje en el devanado secundario.
inV = Voltaje de entrada.
ceV = Voltaje colector emisor en 1Q y 2Q .
S
P
N
N = Razón de vueltas del transformador.
El voltaje a circuito abierto en los transistores 1Q y 2Q es inoc VV 2 , la corriente
promedio en cada transistor es 2/sa II , y la corriente pico en el transistor es igual
a la corriente de entrada es decir sp II [2].
Debido a la configuración de los puntos del transformador se puede observar, que
cuando ninguno de los dos transistores está en conducción, es decir en estado
“OFF”, en la transición de estados de “OFF” a “ON”, el transistor en estado “ON”
está sometido al doble de la tensión de entrada debido a que los dos devanados
primarios tienen igual relación de vueltas, por lo tanto en el momento en que los
transistores cambian de estado, el devanado primario que se encuentra energizado
almacena la energía comportándose como una bobina, colocándose en alta
impedancia teniendo como resultado que el voltaje se refleje en el siguiente
devanado en conducción.
El máximo estrés en los transistores es inV2 . Sin embargo habrá que considerar la
contribución de las inductancias dispersas que se ponen en serie en cada uno de los
devanados primario. En el instante de conmutación la corriente cae rápidamente con
una pendiente dtid / causando un pico positivo en la amplitud del transistor.
CAPÍTULO II. Marco teórico 17
Un diseño conservador representará asumir un pico de tensión no mayor al 30%, así
el voltaje máximo de estrés de la ecuación (2.2) soportado por los dispositivos de
conmutación se limita a un rango seguro [5].
max23.1 inestres VV (2.2)
En donde:
estresV = Voltaje de estrés en los transistores 1Q y 2Q .
maxinV = Voltaje de máximo de entrada.
El convertidor push-pull se activa con una fuente de voltaje constante, de tal manera
que el voltaje en los devanados primarios es una onda cuadrada debido a los
tiempos de conmutación de los transistores que produce un voltaje de corriente
alterna en el devanado secundario. La disposición de los conmutadores en este tipo
de estructuras debe de ser dos señales de control las cuales deben de ser
exactamente simétricas, ya que de lo contrario se producirá un desbalance de flujo
llegando a la saturación del transformador. Incrementando las pérdidas en el núcleo.
Al analizar el convertidor push-pull en estados “ON” y “OFF” se observan dos
estados posibles:
Cuando no conduce 1Q y 2Q .
Cuando conduce 1Q o 2Q .
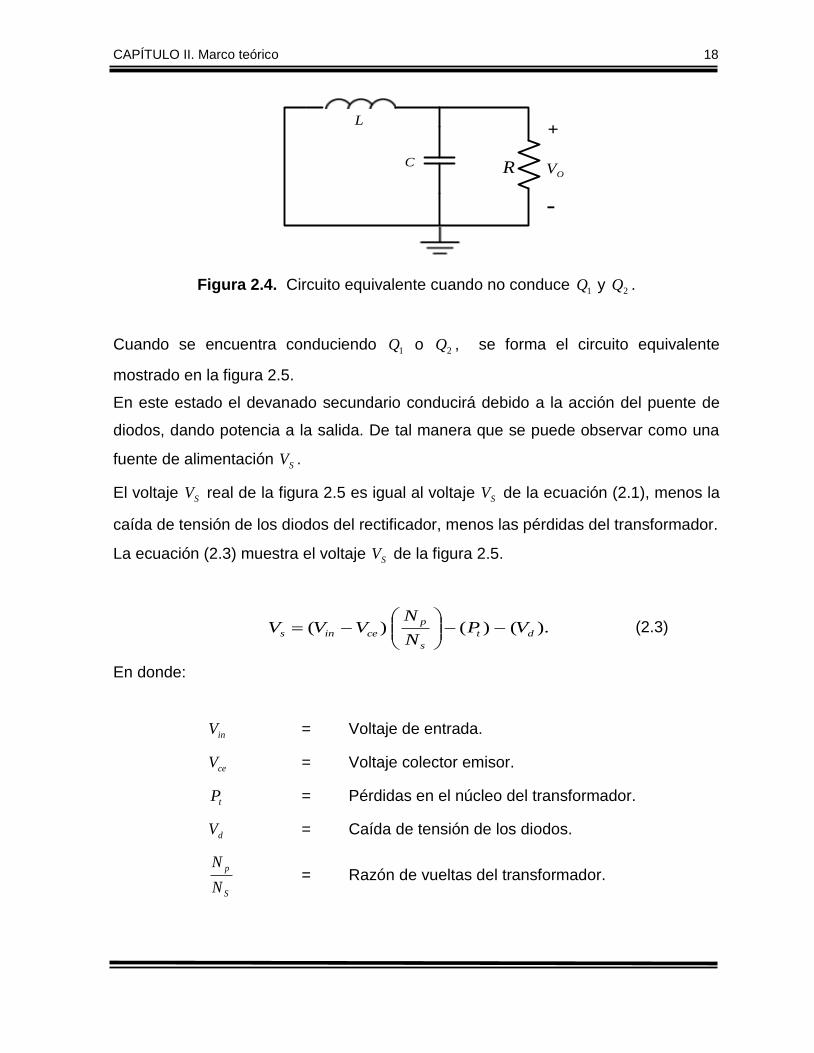
Cuando no conduce 1Q y 2Q es decir en el momento en que ninguno de los
transistores está en estado “ON” se forma el circuito de la figura 2.4 que es el circuito
equivalente. Durante este periodo el inductor del filtro de salida, L, deberá mantener
una corriente circulando, a través de la carga de salida, el capacitor del filtro y el
puente de diodos. Formándose un circuito RLC en paralelo.
CAPÍTULO II. Marco teórico 18
Figura 2.4. Circuito equivalente cuando no conduce 1Q y 2Q .
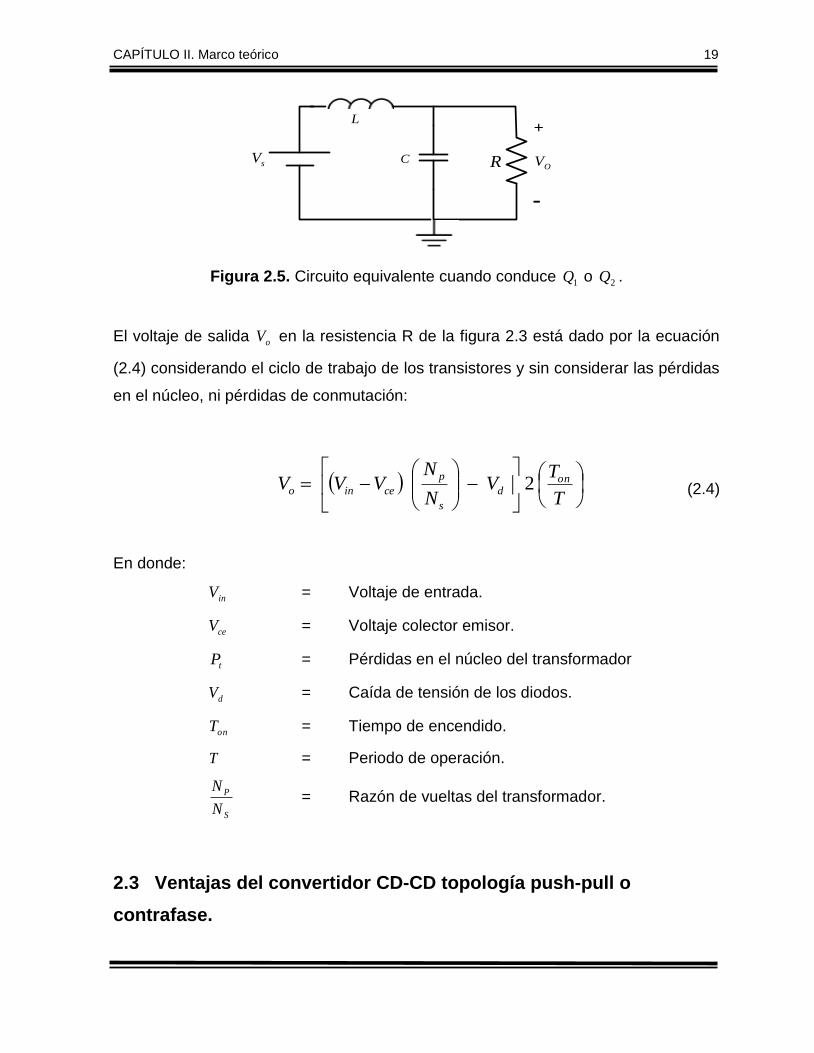
Cuando se encuentra conduciendo 1Q o 2Q , se forma el circuito equivalente
mostrado en la figura 2.5.
En este estado el devanado secundario conducirá debido a la acción del puente de
diodos, dando potencia a la salida. De tal manera que se puede observar como una
fuente de alimentación SV .
El voltaje SV real de la figura 2.5 es igual al voltaje SV de la ecuación (2.1), menos la
caída de tensión de los diodos del rectificador, menos las pérdidas del transformador.
La ecuación (2.3) muestra el voltaje SV de la figura 2.5.
).()()( dt
s
p
ceins VPN
NVVV
(2.3)
En donde:
inV = Voltaje de entrada.
ceV = Voltaje colector emisor.
tP = Pérdidas en el núcleo del transformador.
dV = Caída de tensión de los diodos.
S
p
N
N = Razón de vueltas del transformador.
+
-
OVR
L
C
CAPÍTULO II. Marco teórico 19
Figura 2.5. Circuito equivalente cuando conduce 1Q o 2Q .
El voltaje de salida oV en la resistencia R de la figura 2.3 está dado por la ecuación
(2.4) considerando el ciclo de trabajo de los transistores y sin considerar las pérdidas
en el núcleo, ni pérdidas de conmutación:
T
TV
N
NVVV on
d
s
p
ceino 2 (2.4)
En donde:
inV = Voltaje de entrada.
ceV = Voltaje colector emisor.
tP = Pérdidas en el núcleo del transformador
dV = Caída de tensión de los diodos.
onT = Tiempo de encendido.
T = Periodo de operación.
S
P
N
N = Razón de vueltas del transformador.
2.3 Ventajas del convertidor CD-CD topología push-pull o
contrafase.
+
-
OVR
L
CsV
CAPÍTULO II. Marco teórico 20
Las fuentes conmutadas aisladas flyback, forward, puente completo y medio puente
son de las fuentes con mayor semejanza a la fuente push-pull. A continuación se
enlistan las ventajas que presenta el convertidor push-pull [1], [2] y [5].
Adecuada para aplicaciones con bajo voltaje de entrada.
No requiere de un circuito de reset.
Es la topología más favorecida para aplicaciones “ON” - “OFF”, debido al
estrés de tensión que soportan sus transistores.
Sólo un semiconductor está en serie con la alimentación y con el primario en
cada instante, aplicando toda la alimentación sobre el primario.
Debido a las características de la fuente, se obtienen menos pérdidas por
conmutación y por lo tanto una mayor eficiencia.
Los transistores están referidos a tierra, por lo tanto no se requiere un disparo
aislado.
2.4 Máquina eléctrica.
Una máquina eléctrica es un dispositivo que puede convertir energía mecánica en
energía eléctrica o energía eléctrica en energía mecánica. Cuando este dispositivo
se utiliza para convertir energía mecánica en energía eléctrica se denomina
generador, cuando convierte energía eléctrica en energía mecánica se llama motor.
Las máquinas eléctricas se pueden dividir en tres tipos [7];
Generadores.
Motores.
Transformadores.
Una de las máquinas eléctricas que desempeña un papel fundamental en el proceso
producción-utilización de la energía eléctrica y que operan con base en los mismos
principios que los generadores y los motores se les llama transformadores [7].
CAPÍTULO II. Marco teórico 21
2.4.1 Campo magnético
Los campos magnéticos son el mecanismo fundamental para convertir la energía de
una forma a otra en motores, generadores y transformadores. Existen cuatro
principios básicos que describen cómo se utilizan los campos magnéticos [7]:
1. Un conductor que porta corriente produce un campo magnético a su
alrededor.
2. Un campo magnético variable en el tiempo induce un voltaje en una bobina de
alambre si pasa a través de ésta (es la base del funcionamiento del
transformador).
3. Un conductor que porta corriente en presencia de un campo magnético
experimenta una fuerza inductiva sobre él.
4. Un conductor eléctrico que se mueva en presencia de un campo magnético
tendrá un voltaje inducido en el.
La ley básica que gobierna la producción de un campo magnético por medio de una
corriente es la ley de Ampere. La ley de Ampere se representa en la ecuación (2.5).
netIdIH (2.5)
Donde H es la intensidad del campo magnético producida por la corriente Inet , y
dI es el elemento diferencial a lo largo de la trayectoria de integración.
Si el núcleo es de un material ferromagnético casi todo el campo magnético
producido por la corriente permanecerá dentro del núcleo, de modo que el camino
de integración especificado en la ley de Ampere es la longitud media del núcleo.
La intensidad del campo magnético H es, de alguna manera, una medida del
esfuerzo de una corriente por establecer un campo magnético. La potencia del
CAPÍTULO II. Marco teórico 22
campo magnético producido en el núcleo depende también del material del que está
hecho [7].
La ecuación (2.6) representa la relación entre la intensidad del campo magnético H
y la densidad del flujo magnético resultante B producido dentro del material [7]:
u (2.6)
En donde:
H = Intensidad del campo magnético
B = Densidad del flujo magnético resultante.
u = Permeabilidad magnética del material
La permeabilidad representa la facilidad relativa para establecer un campo magnético
en un material. Es una medida útil para comparar la capacidad de magnetización de
los materiales. Los metales con mayor permeabilidad que forman los núcleos de un
transformador o de un motor cumplen un papel de extrema importancia para
incrementar y concentrar el flujo magnético de un aparato para que la cantidad de
flujo disperso que abandona el núcleo sea menor.
La pequeña cantidad de flujo disperso que abandona el núcleo de un transformador o
de un motor cumple un papel de extrema importancia para incrementar y concentrar
el flujo magnético en el aparato [7].
2.4.2 Circuito magnético.
En un circuito eléctrico sencillo como el de la figura 2.6. La fuente de voltaje iV
genera una corriente i a lo largo de la resistencia R . La relación entre estas
cantidades está dada por la ley de Ohm. La ecuación (2.7) representa la ley de Ohm.
RIV (2.7)
CAPÍTULO II. Marco teórico 23
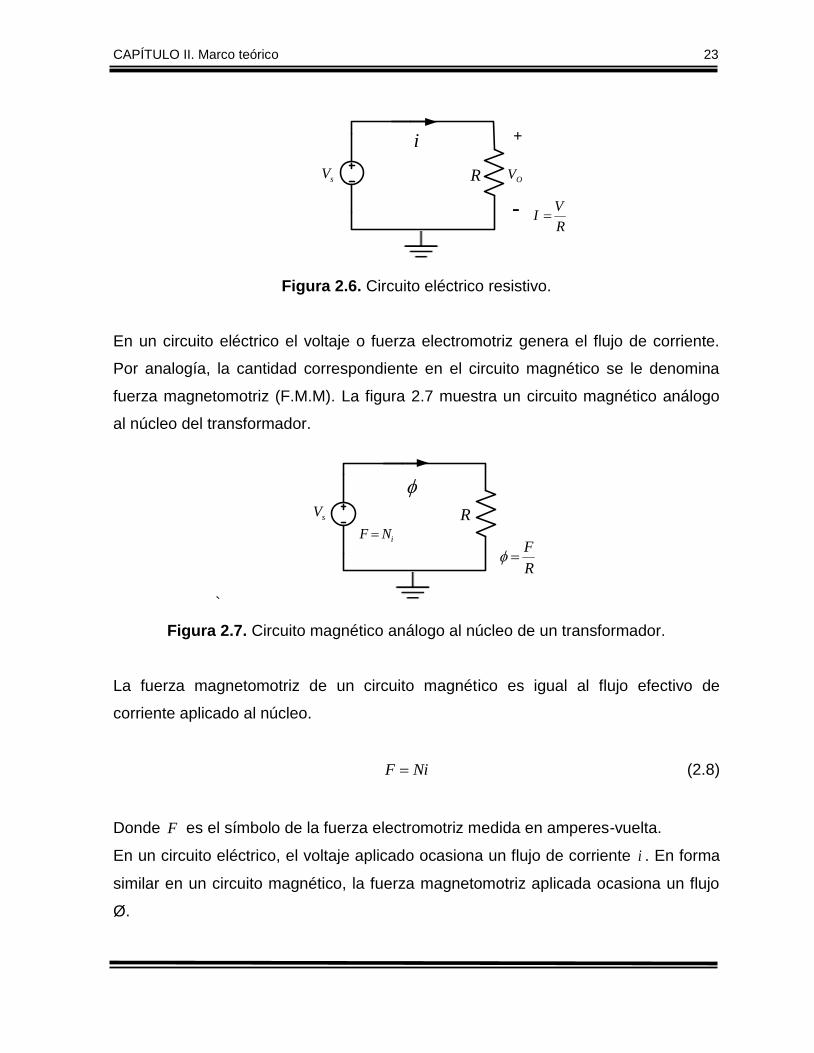
Figura 2.6. Circuito eléctrico resistivo.
En un circuito eléctrico el voltaje o fuerza electromotriz genera el flujo de corriente.
Por analogía, la cantidad correspondiente en el circuito magnético se le denomina
fuerza magnetomotriz (F.M.M). La figura 2.7 muestra un circuito magnético análogo
al núcleo del transformador.
`
Figura 2.7. Circuito magnético análogo al núcleo de un transformador.
La fuerza magnetomotriz de un circuito magnético es igual al flujo efectivo de
corriente aplicado al núcleo.
NiF (2.8)
Donde F es el símbolo de la fuerza electromotriz medida en amperes-vuelta.
En un circuito eléctrico, el voltaje aplicado ocasiona un flujo de corriente i . En forma
similar en un circuito magnético, la fuerza magnetomotriz aplicada ocasiona un flujo
Ø.
iNF
R
F
sV R
+
-
i
R
VI
OVRsV
CAPÍTULO II. Marco teórico 24
La relación entre voltaje y corriente en un circuito eléctrico es RIV de forma
semejante la ecuación (2.9) representa relación entre la fuerza magnetomotriz F y el
flujo Ø [7].
F Ø R (2.9)
En donde:
F = fuerza magnetomotriz del circuito.
Ø = Flujo del circuito
R = Reluctancia del circuito
La reluctancia en un circuito magnético es el homólogo de la resistencia del circuito
eléctrico y se mide en Amperes-vuelta por Weber.
Existe también el análogo magnético de la conductancia. Así como la conductancia
en el circuito eléctrico es el inverso de su resistencia, la permeancia de un circuito
magnético es el inverso de su reluctancia. La ecuación (2.10) muestra la permeancia
en un circuito magnético.
R
1 (2.10)
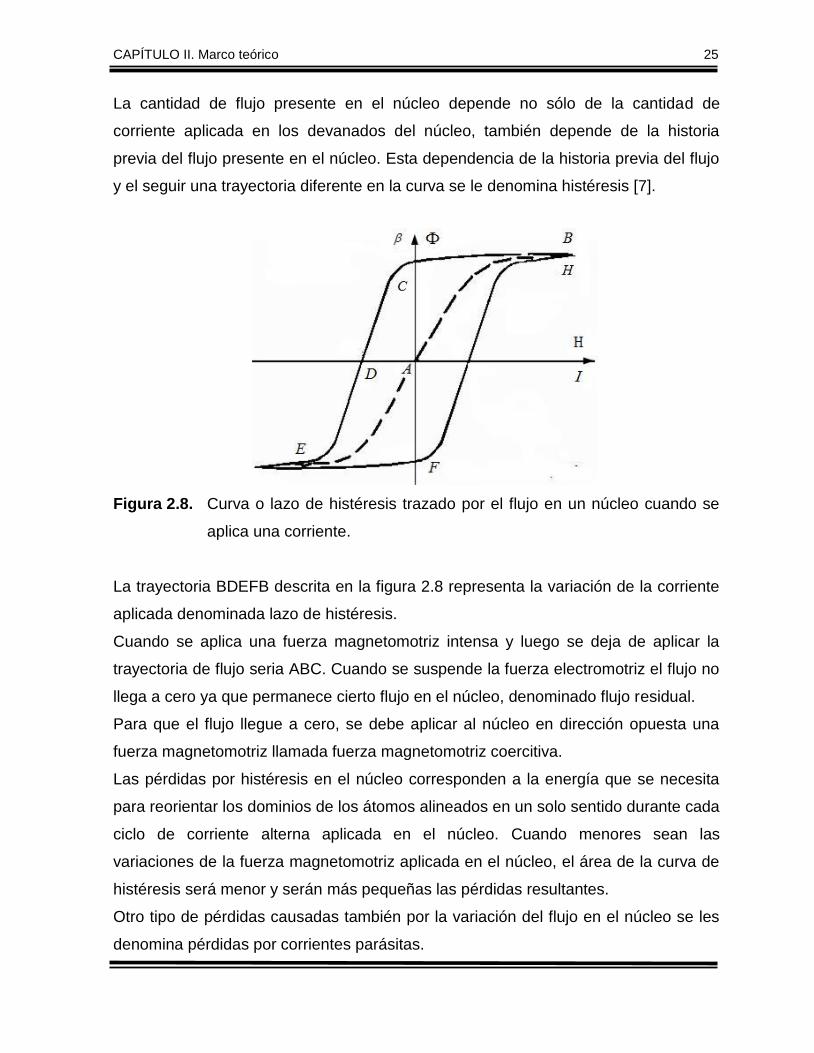
2.4.3 Pérdidas de energía en un núcleo ferromagnético
Al aplicar una corriente alterna a los devanados dispuestos sobre un núcleo y
suponiendo que el flujo inicial en el núcleo es cero. Cuando se incrementa la
corriente por primera vez, el flujo en el núcleo sigue la trayectoria AB, dibujada en la
figura 2.8, sin embargo cuando la corriente decrece el flujo sigue un camino diferente
del seguido cuando la corriente iba en aumento. Cuando la corriente decrece sigue la
trayectoria BCE, y más tarde cuando la corriente se incrementa de nuevo, el flujo
sigue la trayectoria EFB.
CAPÍTULO II. Marco teórico 25
La cantidad de flujo presente en el núcleo depende no sólo de la cantidad de
corriente aplicada en los devanados del núcleo, también depende de la historia
previa del flujo presente en el núcleo. Esta dependencia de la historia previa del flujo
y el seguir una trayectoria diferente en la curva se le denomina histéresis [7].
Figura 2.8. Curva o lazo de histéresis trazado por el flujo en un núcleo cuando se
aplica una corriente.
La trayectoria BDEFB descrita en la figura 2.8 representa la variación de la corriente
aplicada denominada lazo de histéresis.
Cuando se aplica una fuerza magnetomotriz intensa y luego se deja de aplicar la
trayectoria de flujo seria ABC. Cuando se suspende la fuerza electromotriz el flujo no
llega a cero ya que permanece cierto flujo en el núcleo, denominado flujo residual.
Para que el flujo llegue a cero, se debe aplicar al núcleo en dirección opuesta una
fuerza magnetomotriz llamada fuerza magnetomotriz coercitiva.
Las pérdidas por histéresis en el núcleo corresponden a la energía que se necesita
para reorientar los dominios de los átomos alineados en un solo sentido durante cada
ciclo de corriente alterna aplicada en el núcleo. Cuando menores sean las
variaciones de la fuerza magnetomotriz aplicada en el núcleo, el área de la curva de
histéresis será menor y serán más pequeñas las pérdidas resultantes.
Otro tipo de pérdidas causadas también por la variación del flujo en el núcleo se les
denomina pérdidas por corrientes parásitas.
CAPÍTULO II. Marco teórico 26
2.5 Transformador.
Un transformador es una máquina que cambia potencia eléctrica alterna de un nivel
de voltaje a potencia eléctrica alterna a otro nivel de voltaje, mediante la acción de un
campo magnético [7].
Consiste en dos o más bobinas de alambre envueltas alrededor de un núcleo
ferromagnético común. Estas bobinas no están conectadas directamente. La única
conexión entre las bobinas es el flujo magnético común presente.
Un transformador puede recibir energía y devolverla a una tensión más elevada, en
cuyo caso se le denomina transformador elevador, o puede devolverla a una tensión
más baja, en cuyo caso es un transformador reductor. En el caso en que la energía
suministrada tenga la misma tensión que la recibida en el transformador, se dice
entonces que tiene una relación de transformación igual a la unidad.
2.5.1 Clasificación
Los transformadores pueden ser clasificados de distintas maneras, según se tome
como base la operación, la construcción o la utilización, por lo tanto se clasifican de
la siguiente manera [8]:
a) Por su operación.
Transformadores de distribución
Transformadores de potencia
b) Por el número de fases.
Monofásico
Trifásico.
c) Por su utilización.
Transformador para generador.
Transformador de subestación.
Transformador de instrumentos.
CAPÍTULO II. Marco teórico 27
Los devanados son la parte que componen los circuitos eléctricos del transformador
(devanado primario y secundario). Los devanados se fabrican en diferentes tipos
dependiendo de las necesidades del diseño, y los materiales que se utilizan,
básicamente, son: el cobre y el aluminio.
La función de los devanados (primarios) es crear un flujo para inducir en los
devanados (secundarios) una fuerza electromotriz, y transferir potencia eléctrica del
primario al secundario mediante el principio de inducción electromagnética. [8].
El transformador basa su operación en la acción mutua entre fenómenos eléctricos y
magnéticos, no contiene partes móviles.
La transferencia de la energía eléctrica por inducciones electromagnéticas de un
arrollamiento a otro, dispuestas en el mismo circuito magnético, se realiza con
excelente rendimiento [8].
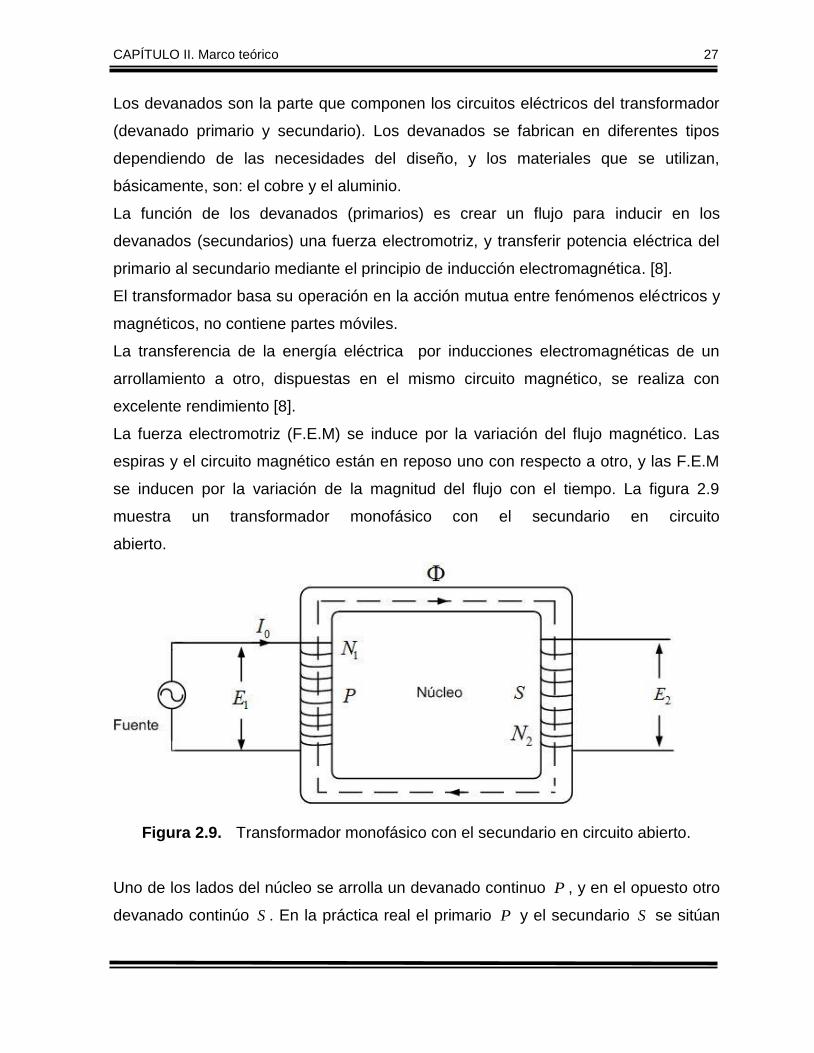
La fuerza electromotriz (F.E.M) se induce por la variación del flujo magnético. Las
espiras y el circuito magnético están en reposo uno con respecto a otro, y las F.E.M
se inducen por la variación de la magnitud del flujo con el tiempo. La figura 2.9
muestra un transformador monofásico con el secundario en circuito
abierto.
Figura 2.9. Transformador monofásico con el secundario en circuito abierto.
Uno de los lados del núcleo se arrolla un devanado continuo P , y en el opuesto otro
devanado continúo S . En la práctica real el primario P y el secundario S se sitúan
CAPÍTULO II. Marco teórico 28
sobre una misma columna; la bobina de menor voltaje se sitúa en la parte interna
(más cerca de núcleo). Esta disposición cumple dos objetivos [7]:
Simplifica el problema de aislamiento del devanado de alta tensión
desde el núcleo.
Resulta menor flujo disperso que en caso de disponer los dos
devanados en el núcleo, separados.
Una fuente suministra corriente alterna al devanado primario P , en el que, al estar
montado sobre el núcleo, su fuerza magnetomotriz (F.M.M) produce un flujo
alternativo Ø en el mismo. El devanado secundario S abraza este flujo, que al ser
alternativo, induce en S una fuerza electromotriz (F.E.M) de la misma frecuencia que
el flujo. Debido a esta F.E.M inducida el devanado secundario S es capaz de
suministrar corriente y energía eléctrica. La energía por lo tanto se transfiere del
devanado P al devanado S por medio del flujo magnético.
2.5.2 Relación de transformación.
El flujo presente en la bobina primaria del transformador tendrá un efecto en la
bobina secundaria del transformador. Este efecto depende de cuánto flujo llega a la
bobina secundaria. No todo el flujo producido en la bobina primaria atraviesa la
bobina secundaria debido a que algunas de las líneas de flujo abandonan el núcleo y
pasan a través del aire.
La porción de flujo que atraviesa una de las bobinas del transformador, pero no la
otra, se llama flujo disperso. El flujo de la bobina primaria del transformado puede
dividirse en dos componentes; un flujo mutuo que permanece en el núcleo y liga
ambos devanados, y un flujo disperso pequeño que pasa a través de la bobina
primaria pero retorna a ella a través del aire, sin cruzar a la bobina secundaria [7].
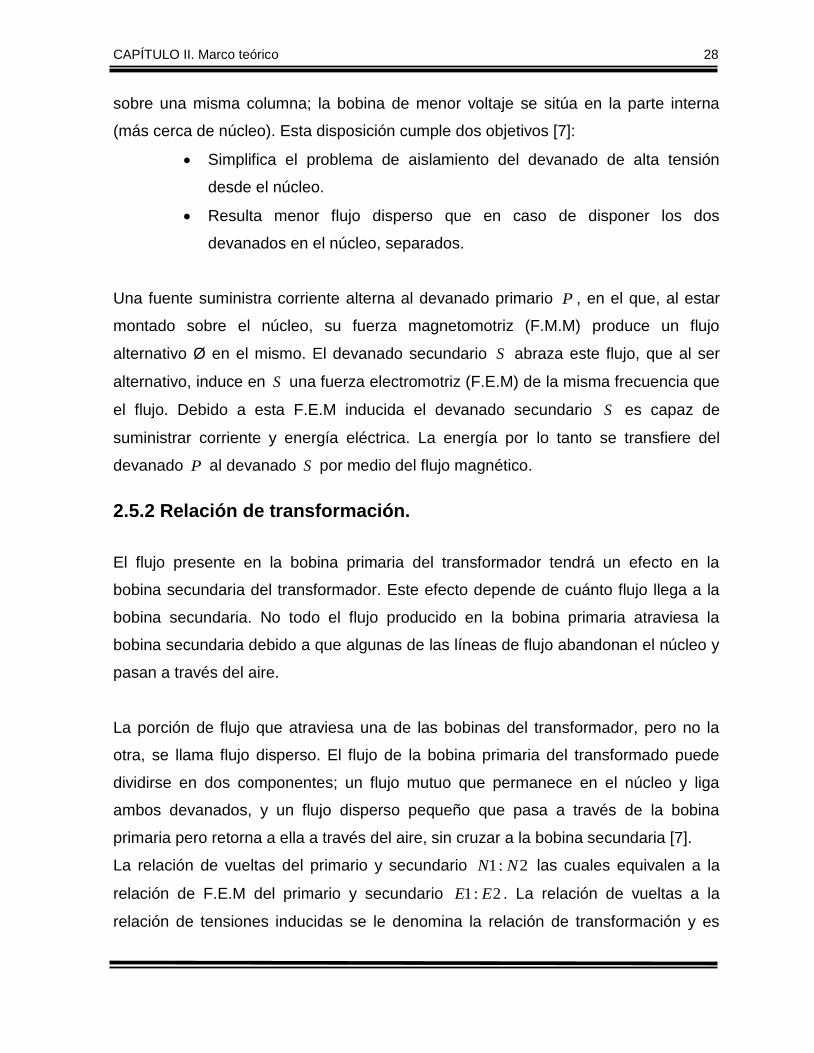
La relación de vueltas del primario y secundario 2:1 NN las cuales equivalen a la
relación de F.E.M del primario y secundario 2:1 EE . La relación de vueltas a la
relación de tensiones inducidas se le denomina la relación de transformación y es
CAPÍTULO II. Marco teórico 29
representada por el símbolo “ a ”. La ecuación (2.11) constituye la relación de
transformación.
2
1
2
1
E
E
N
Na (2.11)
En donde:
2N
N = Relación de vueltas entre el primario y secundario
2
1
E
E = Relación F.E.M entre el primario y secundario.
Esta ecuación significa que la relación entre el voltaje primario causado por el flujo
mutuo, y el voltaje secundario causado por el flujo mutuo, es igual a la relación de
vueltas del transformador. Puesto que en un transformador bien diseñado la relación
entre el voltaje total en el primario y el voltaje total en el secundario del transformador
es aproximadamente igual a la ecuación (2.11).
Cuanto menores sean los flujos dispersos en el transformador, más exacta será la
aproximación a la relación de vueltas del transformador.
2.6 Filtro LC
Para la obtención de una señal de salida de corriente directa es necesario un filtro
pasa bajas con una frecuencia de corte muy por debajo de la frecuencia de
conmutación del convertidor push-pull. Permitiendo únicamente el paso de CD y
filtrando todos los componentes de armónicos que pueda generarse.
Se pueden usar filtros llamados filtros de CD, para alisar el voltaje de salida de CD
de los rectificadores. Los filtros de CD suelen ser de tipo L, C y LC.
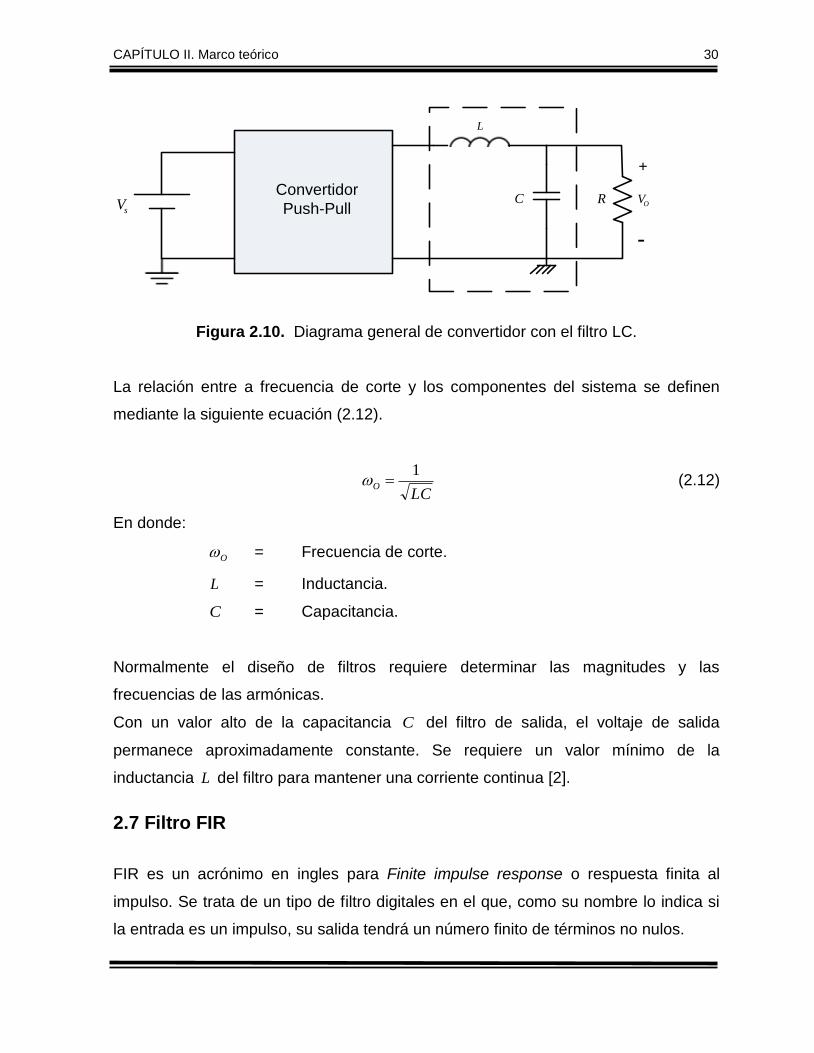
En la figura 2.10. Se observa un diagrama general de convertidor con el filtro LC.
CAPÍTULO II. Marco teórico 30
Figura 2.10. Diagrama general de convertidor con el filtro LC.
La relación entre a frecuencia de corte y los componentes del sistema se definen
mediante la siguiente ecuación (2.12).
LCO
1 (2.12)
En donde:
O = Frecuencia de corte.
L = Inductancia.
C = Capacitancia.
Normalmente el diseño de filtros requiere determinar las magnitudes y las
frecuencias de las armónicas.
Con un valor alto de la capacitancia C del filtro de salida, el voltaje de salida
permanece aproximadamente constante. Se requiere un valor mínimo de la
inductancia L del filtro para mantener una corriente continua [2].
2.7 Filtro FIR
FIR es un acrónimo en ingles para Finite impulse response o respuesta finita al
impulso. Se trata de un tipo de filtro digitales en el que, como su nombre lo indica si
la entrada es un impulso, su salida tendrá un número finito de términos no nulos.
Convertidor
Push-PullOV
+
-
R
L
CsV
CAPÍTULO II. Marco teórico 31
Un filtro FIR causal de orden N se caracteriza por una función de transferencia.
La ecuación (2.13) muestra la función de transferencia de un filtro FIR [9].
kN
k
zkhzH
0
)()( (2.13)
que es un polinomio en 1Z de grado N. En el dominio de tiempo, la relación de
entrada y salida del filtro FIR está dada por la ecuación (2.14):
N
k
knxkhnY0
)()( (2.14)
Donde )(ny y )(nx son, respectivamente, las secuencias de salida y entrada.
Un filtro FIR de N orden se caracteriza por N + 1 coeficientes y, en general, requiere
N + 1 multiplicadores y N sumadores de dos entradas para su implementación. Las
estructuras en las cuales los coeficientes de los multiplicadores son precisamente los
coeficientes de la función de transferencia se les denominan estructuras de forma
directa [9].
Un análisis para este tipo de estructuras en forma directa a partir de la ecuación
(2.14) en el dominio del tiempo puede formularse sin dificultad de la siguiente
manera:
...]4[]4[]3[]3[]2[]2[]1[]1[][]0[ nxhnxhnxhnxhnxhny
En donde:
ny = salida del filtro FIR.
][xh = valor de los coeficientes.
n = muestra
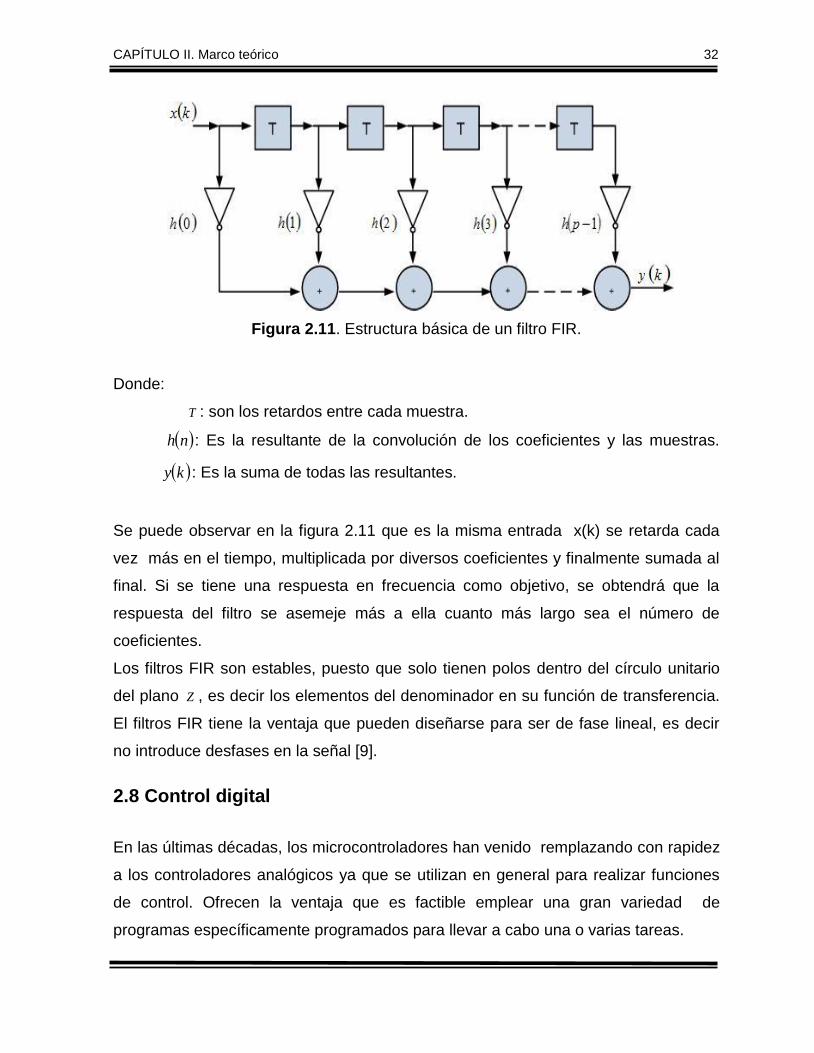
La figura básica 2.11 muestra una estructura de un filtro FIR:
CAPÍTULO II. Marco teórico 32
Figura 2.11. Estructura básica de un filtro FIR.
Donde:
T : son los retardos entre cada muestra.
nh : Es la resultante de la convolución de los coeficientes y las muestras.
ky : Es la suma de todas las resultantes.
Se puede observar en la figura 2.11 que es la misma entrada x(k) se retarda cada
vez más en el tiempo, multiplicada por diversos coeficientes y finalmente sumada al
final. Si se tiene una respuesta en frecuencia como objetivo, se obtendrá que la
respuesta del filtro se asemeje más a ella cuanto más largo sea el número de
coeficientes.
Los filtros FIR son estables, puesto que solo tienen polos dentro del círculo unitario
del plano Z , es decir los elementos del denominador en su función de transferencia.
El filtros FIR tiene la ventaja que pueden diseñarse para ser de fase lineal, es decir
no introduce desfases en la señal [9].
2.8 Control digital
En las últimas décadas, los microcontroladores han venido remplazando con rapidez
a los controladores analógicos ya que se utilizan en general para realizar funciones
de control. Ofrecen la ventaja que es factible emplear una gran variedad de
programas específicamente programados para llevar a cabo una o varias tareas.
CAPÍTULO II. Marco teórico 33
Un controlador puede estar basado en sistemas neumáticos, sistemas basados en
amplificadores operacionales o en sistemas de cómputo.
El termino control digital se usa cuando una computadora está en lazo de
realimentación y se encarga de ejecutar las operaciones programadas para obtener
una salida deseada.
La secuencia de operación en un control digital puede estar basada en el reloj interno
del propio microcontrolador, también puede estar basada en los eventos generados
por la planta a controlar, o una combinación de éstas [10].
Cuando una operación está basada en el reloj interno las operaciones se realizan en
tiempos específicos y constantes. De lo contrario a las operaciones basadas en
eventos es decir cuando la retroalimentación indica que ha ocurrido un cambio en la
planta.
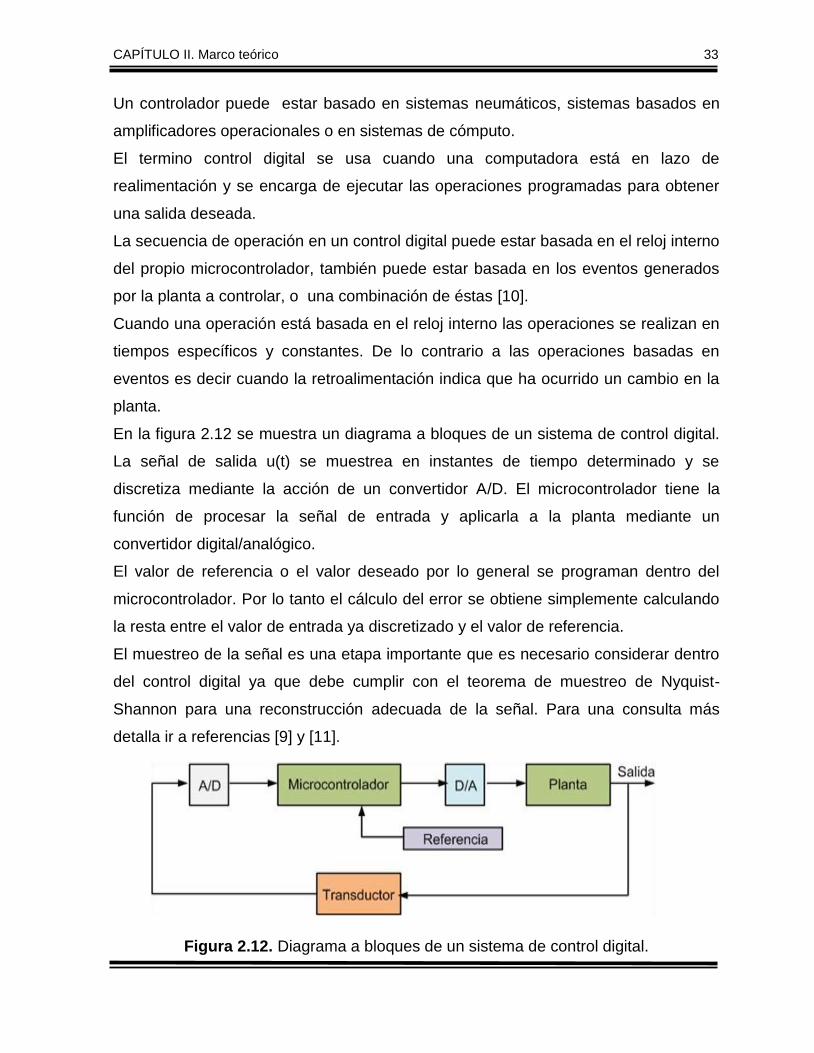
En la figura 2.12 se muestra un diagrama a bloques de un sistema de control digital.
La señal de salida u(t) se muestrea en instantes de tiempo determinado y se
discretiza mediante la acción de un convertidor A/D. El microcontrolador tiene la
función de procesar la señal de entrada y aplicarla a la planta mediante un
convertidor digital/analógico.
El valor de referencia o el valor deseado por lo general se programan dentro del
microcontrolador. Por lo tanto el cálculo del error se obtiene simplemente calculando
la resta entre el valor de entrada ya discretizado y el valor de referencia.
El muestreo de la señal es una etapa importante que es necesario considerar dentro
del control digital ya que debe cumplir con el teorema de muestreo de Nyquist-
Shannon para una reconstrucción adecuada de la señal. Para una consulta más
detalla ir a referencias [9] y [11].
Figura 2.12. Diagrama a bloques de un sistema de control digital.
CAPÍTULO II. Marco teórico 34
En todos los sistemas de control digital o analógico existen retrasos; el cambio, en
una condición que se está controlando no produce de manera inmediata una
respuesta correctiva del sistema de control. Esto se debe a que el sistema requiere
tiempos para producir las respuestas necesarias. Tomar en cuenta los retrasos en el
sistema es de suma importancia, a partir de esto se puede tener una clara visión del
tipo de control que es necesario y el valor de las ganancias aplicadas al control [10].
Otro término que es de suma importancia para controladores digitales en lazo
cerrado es el error en estado permanente. En el controlador se produce una señal de
error como resultado de un cambio en la variable que se está controlando o en el
voltaje de entrada establecido y se genera un error en estado estable que se refiere a
la diferencia entre el valor de entrada establecido y la salida una vez que todos los
transitorios desaparecen [10].
Por lo tanto si existe un error en estado estable la salida del sistema nunca alcanza
el valor predeterminado.
Otra de las causas de error aunque de tipo aleatorio se debe al ruido generado por la
planta que se está controlando, por tal motivo es muy importante un filtrado de la
señal sensada para eliminar cualquier variación indeseada en la señal de control.
Existen diversos tipos de modos de control aplicados en lazos cerrado de control
digital por ejemplo existen modos de control puramente proporcional, modos de
control derivativos, modos de control integrativos o la combinación de estos modos
de control generan [10]:
Modos de control proporcional derivativo (PD).
Modos de control proporcional integral (PI).
Modos de control proporcional integral derivativo (PID).
El tipo de control aplicado en un sistema depende de la planta que se necesita
controlar, del tipo de respuesta deseada de la planta y de las características de la
planta, es decir, es necesario tomar en cuenta su tiempo de respuesta, su máximo
sobre impulso, y su sobreoscilación en lazo abierto, para determinar qué tipo de
controlador es el más adecuado.
CAPÍTULO II. Marco teórico 35
2.8.1 Control proporcional-integral (PI)
El controlador PI es un controlador realimentado cuyo propósito es hacer que el error
en estado estacionario )(te , entre la señal de referencia y la señal de salida de la
planta )(ty , sea cero [10].
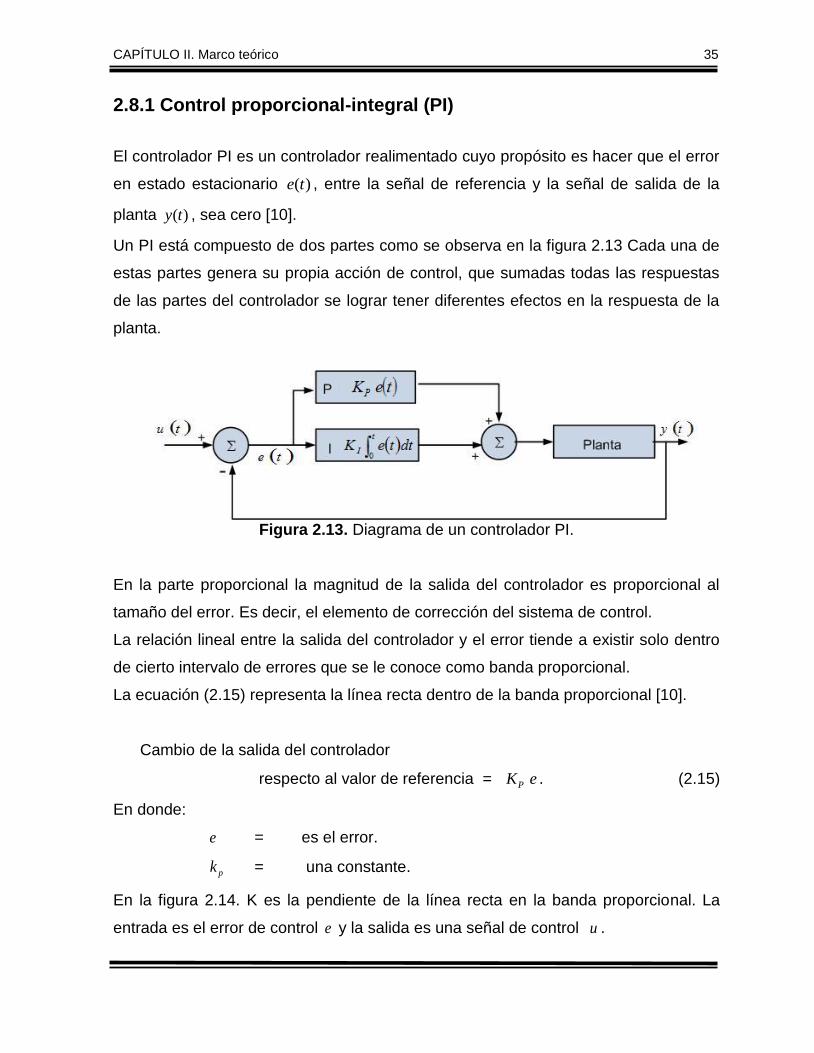
Un PI está compuesto de dos partes como se observa en la figura 2.13 Cada una de
estas partes genera su propia acción de control, que sumadas todas las respuestas
de las partes del controlador se lograr tener diferentes efectos en la respuesta de la
planta.
Figura 2.13. Diagrama de un controlador PI.
En la parte proporcional la magnitud de la salida del controlador es proporcional al
tamaño del error. Es decir, el elemento de corrección del sistema de control.
La relación lineal entre la salida del controlador y el error tiende a existir solo dentro
de cierto intervalo de errores que se le conoce como banda proporcional.
La ecuación (2.15) representa la línea recta dentro de la banda proporcional [10].
Cambio de la salida del controlador
respecto al valor de referencia = eKP . (2.15)
En donde:
e = es el error.
pk = una constante.
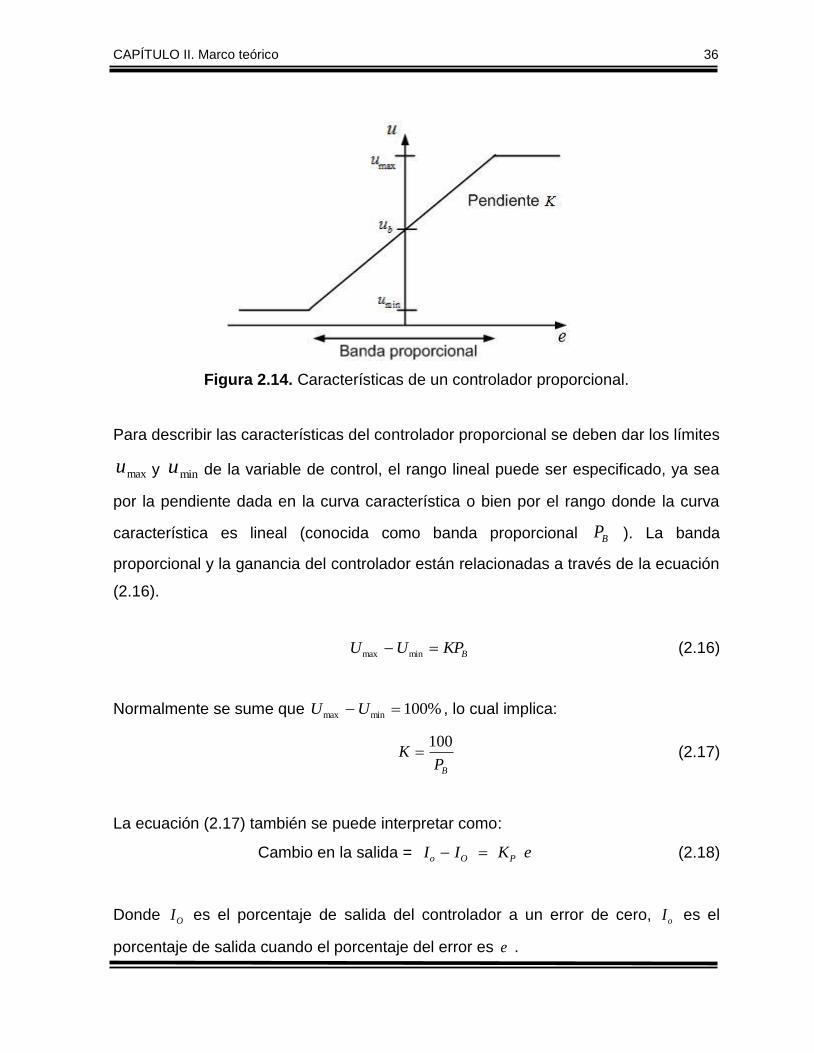
En la figura 2.14. K es la pendiente de la línea recta en la banda proporcional. La
entrada es el error de control e y la salida es una señal de control u .
CAPÍTULO II. Marco teórico 36
Figura 2.14. Características de un controlador proporcional.
Para describir las características del controlador proporcional se deben dar los límites
maxu y minu de la variable de control, el rango lineal puede ser especificado, ya sea
por la pendiente dada en la curva característica o bien por el rango donde la curva
característica es lineal (conocida como banda proporcional BP ). La banda
proporcional y la ganancia del controlador están relacionadas a través de la ecuación
(2.16).
BKPUU minmax (2.16)
Normalmente se sume que %100minmax UU , lo cual implica:
BPK
100 (2.17)
La ecuación (2.17) también se puede interpretar como:
Cambio en la salida = eKII POo (2.18)
Donde OI es el porcentaje de salida del controlador a un error de cero, oI es el
porcentaje de salida cuando el porcentaje del error es e .
CAPÍTULO II. Marco teórico 37
Aplicando transformada de Laplace a ecuación (2.18) para obtener su función de
transferencia:
Cambio de salida SEKS p (2.19)
Y, así
Función de transferencia =
SE
Ssalidaladecambio (2.20)
El modo de control integral produce una acción de control que es proporcional a la
integral del error en el tiempo, entonces una señal de error constante producirá una
señal de error creciente debido a que el control integral suma todos los errores
pasados respondiendo a los cambios que ocurren.[10]
La ecuación (2.21) muestra la tasa de cambio de la salida de control I que es
proporcional a la señal de error de entrada e [10].
eKdt
dII (2.21)
Integrando la ecuación (2.21) se obtiene:
dteKdI
t
I
Isal
Io
0
(2.22)
t
Isal dteKII0
0 (2.23)
OI es la salida del controlador en el tiempo cero, salI es la salida en el tiempo t .
La función de transferencia se obtiene tomando la transformada de Laplace a
ecuación (2.23):
SEKS
SII IOsal
1 (2.24)
Y así,
Función de transferencia = IKS
1 (2.25)
CAPÍTULO II. Marco teórico 38
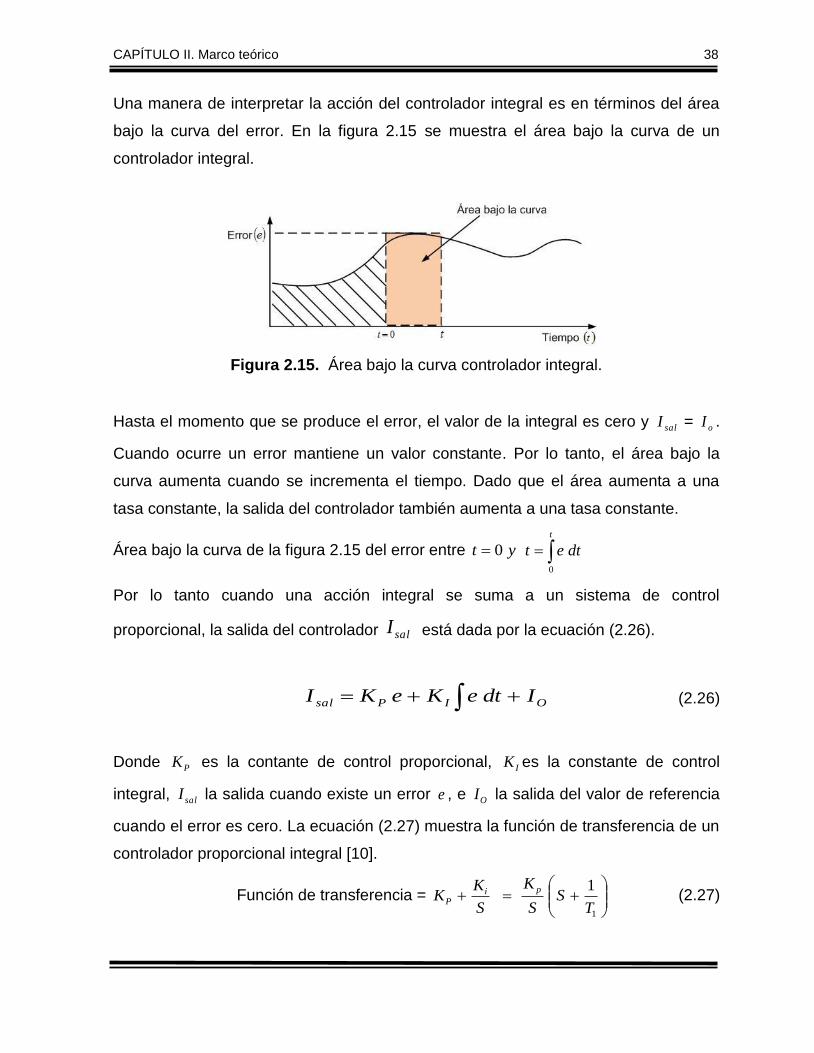
Una manera de interpretar la acción del controlador integral es en términos del área
bajo la curva del error. En la figura 2.15 se muestra el área bajo la curva de un
controlador integral.
Figura 2.15. Área bajo la curva controlador integral.
Hasta el momento que se produce el error, el valor de la integral es cero y salI = oI .
Cuando ocurre un error mantiene un valor constante. Por lo tanto, el área bajo la
curva aumenta cuando se incrementa el tiempo. Dado que el área aumenta a una
tasa constante, la salida del controlador también aumenta a una tasa constante.
Área bajo la curva de la figura 2.15 del error entre yt 0 t
dtet0
Por lo tanto cuando una acción integral se suma a un sistema de control
proporcional, la salida del controlador salI está dada por la ecuación (2.26).
OIPsal IdteKeKI (2.26)
Donde PK es la contante de control proporcional, IK es la constante de control
integral, salI la salida cuando existe un error e , e OI la salida del valor de referencia
cuando el error es cero. La ecuación (2.27) muestra la función de transferencia de un
controlador proporcional integral [10].
Función de transferencia =
1
1
TS
S
K
S
KK
piP (2.27)
CAPÍTULO II. Marco teórico 39
Donde 1T = PK / IK y es la constante de tiempo integral.
El tipo de control PI, se utiliza cuando la variable del proceso experimenta grandes
cambios, sin embargo como la parte integral del control toma tiempo en llevarse a
cabo, los cambios deben ser más o menos lentos para evitar oscilaciones.
Una de las desventajas del controlar PI es que cuando el proceso se inicia con la
salida del controlador en 100 % la acción integral produce un sobrepaso
considerable del error antes de lograr finalmente su estabilidad.
En el capítulo 3, se explica de manera detallada cómo se soluciona este problema.
2.9 Controlador digital de señales.
La implementación del algoritmo de control, el filtrado de la señales y las señales de
disparo para la fuente conmutada, se puede implementar en sistemas digitales los
cuales proporcionan un gran ventaja que es su velocidad de procesamiento.
Un controlador digital de señales (DSC) es un controlador que integra de manera
compacta las capacidades de control de un microcontrolador (MCU) con las
capacidades de computación y rendimiento de un procesador digitales de señales
(DSP).
El dsPIC creado por la empresa Microchip Technology Inc. Es un microcontrolador
de 16 bits los cuales se dividen en dos familias:
Familia dsPIC30F.
Familia dsPIC33F.
Para la realización de este trabajo se implementó un algoritmo de control en un
dispositivo de la familia dsPIC30F para más información de la amplia gama de
dispositivos de la familia dsPIC3OF consultar [12] y [13]. Para mayor información
sobre la familia dsPIC33F consultar [14].
CAPÍTULO II. Marco teórico 40
2.9.1 dsPIC30f2020
El dsPIC30F2020 cuenta con una arquitectura tipo Harvard donde la memoria de
datos y memoria del programa se encuentran separados físicamente lo cual permite
dos diferentes tamaños de palabras, uno de 16 bits para datos y otro de 24 bits para
instrucciones teniendo como resultado una mayor eficiencia de instrucciones y una
mayor velocidad de procesamiento.
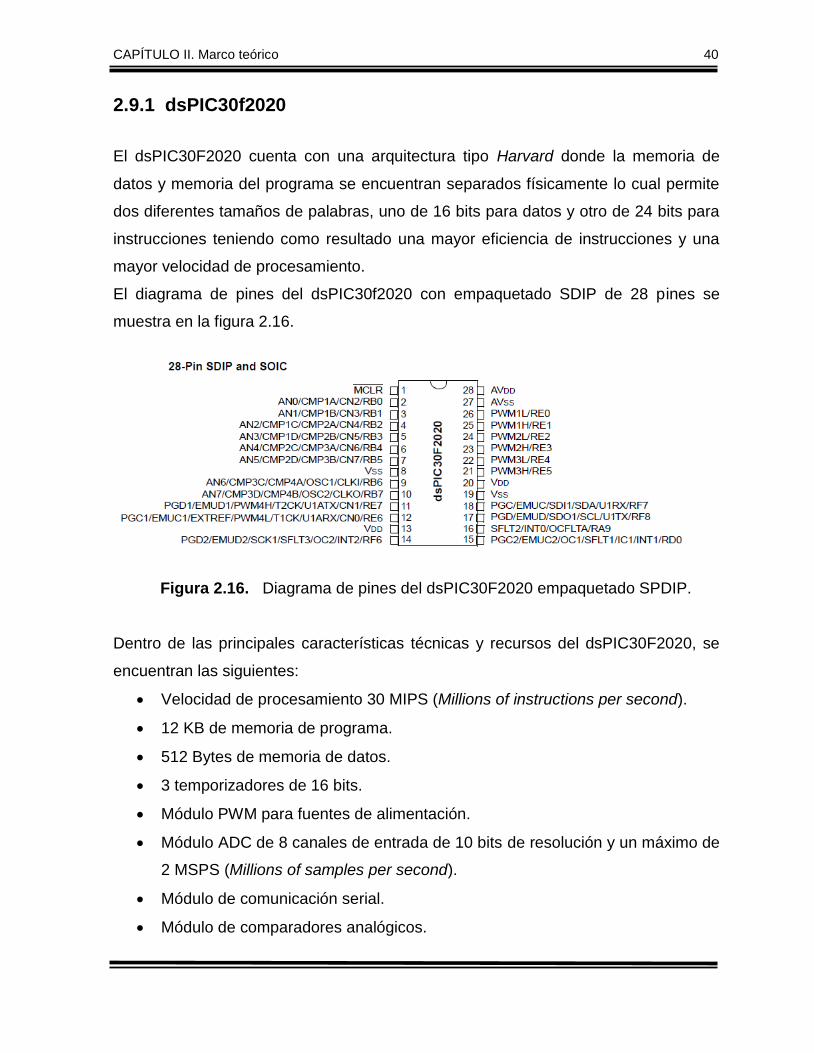
El diagrama de pines del dsPIC30f2020 con empaquetado SDIP de 28 pines se
muestra en la figura 2.16.
Figura 2.16. Diagrama de pines del dsPIC30F2020 empaquetado SPDIP.
Dentro de las principales características técnicas y recursos del dsPIC30F2020, se
encuentran las siguientes:
Velocidad de procesamiento 30 MIPS (Millions of instructions per second).
12 KB de memoria de programa.
512 Bytes de memoria de datos.
3 temporizadores de 16 bits.
Módulo PWM para fuentes de alimentación.
Módulo ADC de 8 canales de entrada de 10 bits de resolución y un máximo de
2 MSPS (Millions of samples per second).
Módulo de comunicación serial.
Módulo de comparadores analógicos.
CAPÍTULO II. Marco teórico 41
Para un estudio más a fondo del controlador digital dsPIC30F2020 consultar [15],
[12] y [13].
2.9.2 MPLAB IDE
El software MPLAB es un entorno IDE (por sus siglas en inglés Integrated
Development Environment), es una herramienta distribuida por Microchip para el
desarrollo de aplicaciones con PIC’s y dsPIC’s.
En este entorno de desarrollo es posible programar los PIC’s y dsPIC’s tanto en
lenguaje ensamblador como en lenguaje C si se cuenta con el compilador adecuado
para el tipo de dispositivo.
Para programar dsPIC’s de la familia dsPIC30F es necesario instalar el software
MPLAB IDE C30 el cual realiza la compilación de archivos en lenguaje C
produciendo archivos en lenguaje ensamblador.
Para mayor información sobre las características, limitaciones y configuraciones del
los software’s MPLAB IDE y MPLAB IDE C30, consultar [16] Y [17].
2.9.3 Lenguaje C.
Para la realización de este proyecto se utiliza el lenguaje C que es un lenguaje de
alto nivel que a menudo se utiliza en vez de lenguaje ensamblador para programar
microprocesadores.
El lenguaje ensamblador varía dependiendo del tipo del microcontroladores mientras
que C es un lenguaje estandarizado por la ANSI (America National Standards
Institute). Siendo una de las principales ventajas al momento de utilizar el lenguaje C
[10].
Para un estudio más detallado del tema consultar [18], [10] y [21].
CAPÍTULO II. Marco teórico 42
Rerefencias
[1] MUHAMMAD H. Rashid, “Power Electronics Handbook”, Academic Press,
Primera edición, 2001.
[2] MUHAMMAD H. Rashid, “Electrónica de potencia. Circuitos, Dispositivos y
aplicaciones”. Editorial Pearson educación, Tercera edición, 2004.
[3] PEÑUELAS Machado José Ángel, “Algoritmo de Seguimiento del Máximo
Punto de Potencia para Sistemas Fotovoltaicos en Cd. Obregón, Sonora”,
Tesis de Ingeniero en Electrónica, Instituto Tecnológico de Sonora, Cd.
Obregón, Sonora, Octubre de 2008.
[4] ANGULO Guzmán Sara Yael, “Aportación al desarrollo de un inversor
monofásico para sistemas fotovoltaicos interconectados con énfasis en una
técnica de control lineal”, Tesis de Ingeniero en Electrónica, Instituto
Tecnológico de Sonora, Cd. Obregón, Sonora, Mayo de 2009.
[5] Universidad de Valencia, (página Web), http://www.uv.es/etse
“sistemas eléctricos de alimentación”. Consultada en junio de 2009.
[6] SANCHEZ López Juan De Dios, “Dispositivos electrónicos de potencia”,
Editorial universidad autónoma de baja California UABC, Segunda edición,
2002.
[7] CHAPMAN J. Stephen, “Máquinas eléctricas”, Editorial McGRAW-Hill
Interamericana, Tercera edición 2003.
[8] AVELINO Pérez Pedro, “Transformadores de distribución: Teoría, calculo,
construcción y pruebas “, Editorial Reverte, Segunda edición 2001.
CAPÍTULO II. Marco teórico 43
[9] SANJIT K. Mitra, “procesamiento de señales digitales: un enfoque basado en
computadora”, Editorial McGRAW-Hill, tercera edición 2007.
[10] BOLTON W, “Mecatrónica: sistema de control electrónico en la ingeniería
mecánica y eléctrica”, Editorial Alfaomega, tercera edición 2006.
[11] SHANNON C.E,” comunicación en presencia de ruido”, Editorial IRE, Edición
1949.
[12] MICROCHIP Technology Inc., “Getting Started with dsPIC30F Digital Signal
Controllers User’s Guide”, 2005, (Página Web),
http://ww1.microchip.com/downloads/en/DeviceDoc/70151a.pdf, consultada en
mayo 2009.
[13] MICROCHIP Technology Inc., dsPIC30F Family Reference Manual, (Página
Web),
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId
=2574, consultada en mayo de 2009.
[14] MICROCHIP Technology Inc., dsPIC33F Family Reference Manual, (Página
Web),
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId
=2573, consultada en Noviembre de 2008.
[15] MICROCHIP Technology Inc., dsPIC30F1010/202X, Datasheet, Manual:
70178C.pdf, Consultada en Noviembre 2008.
[16] MICROCHIP Technology Inc., “MPLAB IDE User’s Guide”, 2006, Manual:
51519a.pdf, Consultada en Noviembre 2008.
CAPÍTULO II. Marco teórico 44
[17] MICROCHIP Technology Inc., “MPLAB C30 C Compiler User`s Guide”, 2007,
(Página Web),
http://ww1.microchip.com/downloads/en/DeviceDoc/C30_Users_Guide_51284
e.pdf, consultada en Noviembre 2008.
[18] DOMITSU Kono Manuel, “Programación en el lenguaje C”, (Página Web),
Http://www.itson.mx/die/mdomitsu/bibliotecaDigital/Programacion_Lenguaje_C
, consultada en Noviembre 2008.
[19] BOYLESTAD Robert L, “Introducción al análisis de circuitos”, Editorial
PEARSON, décima edición 2009.
[20] Kernighan, Brian W.; Dennis M. Ritchie “The C Programming Language”,
Editorial Prentice Hall, primera edición 1978.
CAPÍTULO III
Desarrollo
En este capítulo se describen los procedimientos seguidos para la implementación
de esta tesis. El desarrollo de esta tesis se dividió en dos partes: la parte de potencia
y la parte digital, en la primera parte se describe el diseño del convertidor push-pull,
transformador, filtro LC, puente de diodos y circuitos de protección. En la parte digital
se da una descripción de los algoritmos desarrollados para la implementación del
control, así como para la realización del despliegue y filtrado de datos. Se explica
detalladamente cómo es configurado el procesador digital de señales y cuál es el
objetivo de cada módulo configurado.
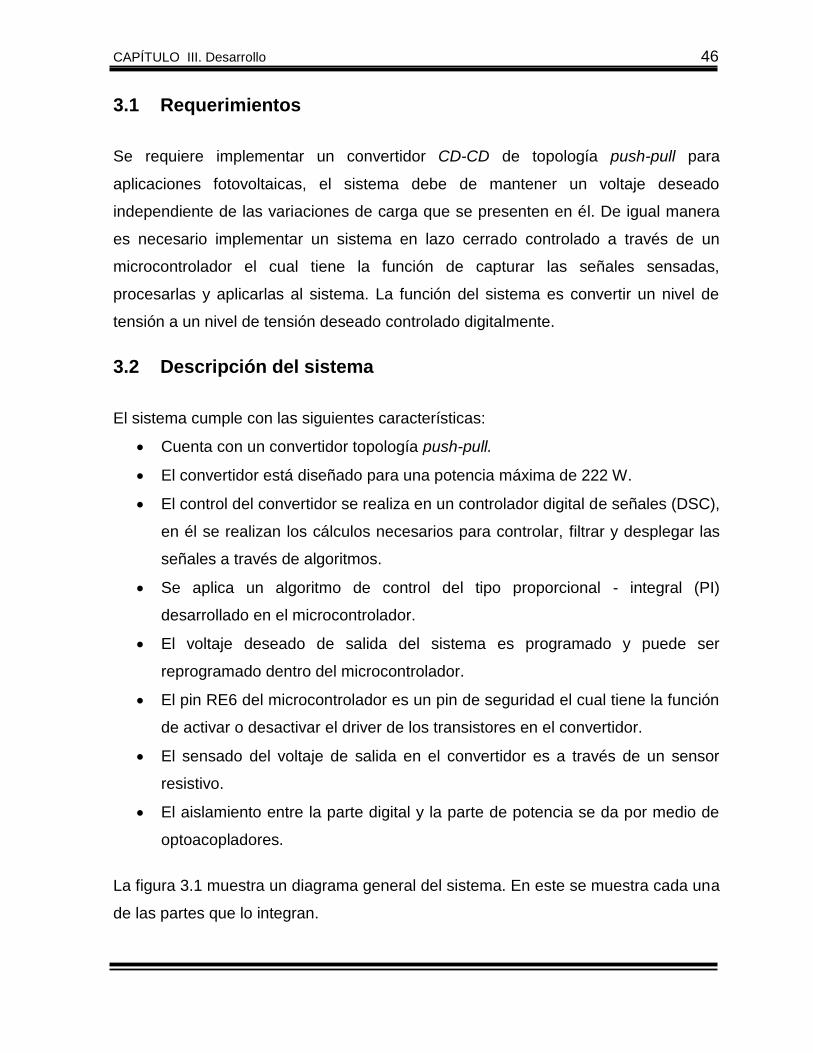
CAPÍTULO III. Desarrollo 46
3.1 Requerimientos
Se requiere implementar un convertidor CD-CD de topología push-pull para
aplicaciones fotovoltaicas, el sistema debe de mantener un voltaje deseado
independiente de las variaciones de carga que se presenten en él. De igual manera
es necesario implementar un sistema en lazo cerrado controlado a través de un
microcontrolador el cual tiene la función de capturar las señales sensadas,
procesarlas y aplicarlas al sistema. La función del sistema es convertir un nivel de
tensión a un nivel de tensión deseado controlado digitalmente.
3.2 Descripción del sistema
El sistema cumple con las siguientes características:
Cuenta con un convertidor topología push-pull.
El convertidor está diseñado para una potencia máxima de 222 W.
El control del convertidor se realiza en un controlador digital de señales (DSC),
en él se realizan los cálculos necesarios para controlar, filtrar y desplegar las
señales a través de algoritmos.
Se aplica un algoritmo de control del tipo proporcional - integral (PI)
desarrollado en el microcontrolador.
El voltaje deseado de salida del sistema es programado y puede ser
reprogramado dentro del microcontrolador.
El pin RE6 del microcontrolador es un pin de seguridad el cual tiene la función
de activar o desactivar el driver de los transistores en el convertidor.
El sensado del voltaje de salida en el convertidor es a través de un sensor
resistivo.
El aislamiento entre la parte digital y la parte de potencia se da por medio de
optoacopladores.
La figura 3.1 muestra un diagrama general del sistema. En este se muestra cada una
de las partes que lo integran.
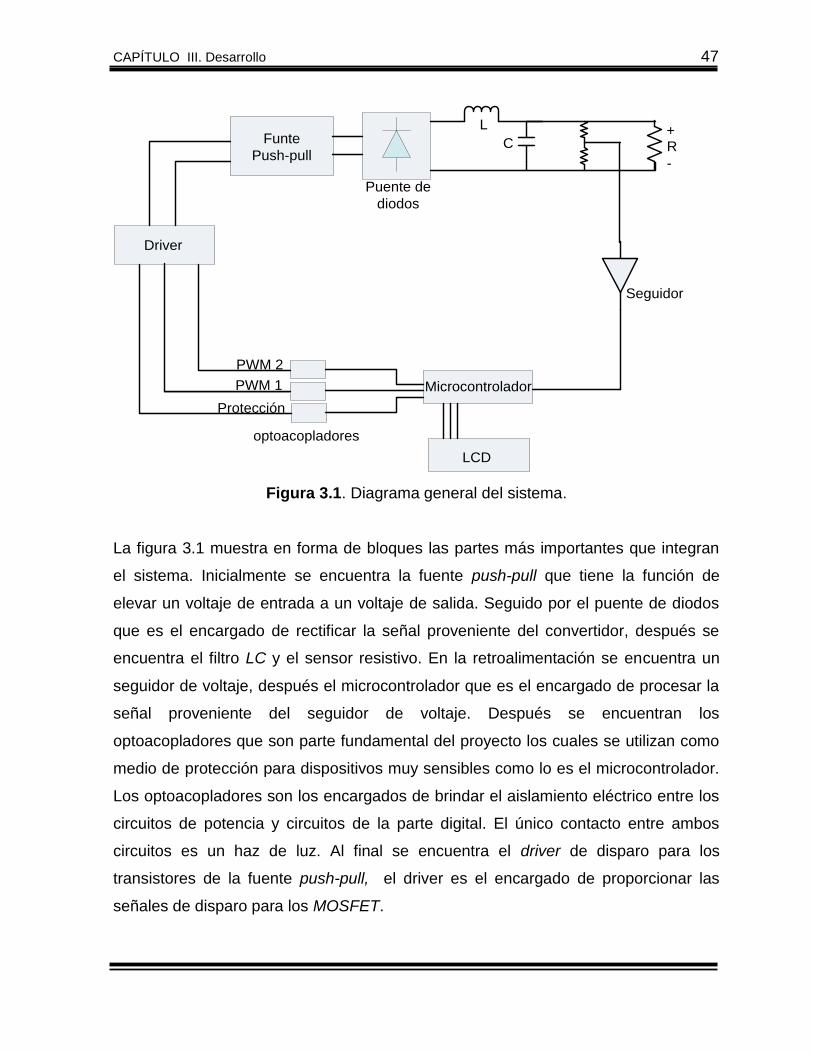
CAPÍTULO III. Desarrollo 47
optoacopladores
PWM 1
Protección
L
C
PWM 2
Funte
Push-pull
Microcontrolador
LCD
Driver
Puente de
diodos
R
-
+
Seguidor
Figura 3.1. Diagrama general del sistema.
La figura 3.1 muestra en forma de bloques las partes más importantes que integran
el sistema. Inicialmente se encuentra la fuente push-pull que tiene la función de
elevar un voltaje de entrada a un voltaje de salida. Seguido por el puente de diodos
que es el encargado de rectificar la señal proveniente del convertidor, después se
encuentra el filtro LC y el sensor resistivo. En la retroalimentación se encuentra un
seguidor de voltaje, después el microcontrolador que es el encargado de procesar la
señal proveniente del seguidor de voltaje. Después se encuentran los
optoacopladores que son parte fundamental del proyecto los cuales se utilizan como
medio de protección para dispositivos muy sensibles como lo es el microcontrolador.
Los optoacopladores son los encargados de brindar el aislamiento eléctrico entre los
circuitos de potencia y circuitos de la parte digital. El único contacto entre ambos
circuitos es un haz de luz. Al final se encuentra el driver de disparo para los
transistores de la fuente push-pull, el driver es el encargado de proporcionar las
señales de disparo para los MOSFET.
CAPÍTULO III. Desarrollo 48
3.3. Implementación
El sistema del la figura 3.1 se puede dividir en 2 partes básicas:
Etapa de potencia.
Etapa digital.
3.4. Etapa de potencia
En esta etapa se describe los procedimientos utilizados para la elaboración del
convertidor push-pull, puente de diodo, filtro LC, sensor resistivo, el seguidor de
voltaje y circuitos de protección.
3.4.1 Convertidor CD-CD topología push-pull
El convertidor tiene como objetivo elevar un voltaje de entrada iV a un voltaje de
salida oV . Dentro de las principales características del convertidor desarrollado se
tiene las siguientes: está conformado por dos transistores referenciados a tierra de la
fuente de alimentación, la elevación del voltaje se da a través de un trasformador de
alta frecuencia, el esfuerzo de tensión de cada transistor de la fuente es
aproximadamente el doble de la tensión de entrada, conduce un elemento
semiconductor en cada momento siendo esta característica la que le da facilidad de
manejar potencias elevadas con una alta eficiencia en el convertidor, la conversión
CA-CD se da a través de un rectificación de onda completa, para el filtrado de la
señal se implementó un filtro LC, se implementaron circuitos de protección como lo
son los snubbers para la eliminación de ruidos en el convertidor y la eficiente
disipación de potencia.
La figura 3.2 muestra el diagrama de la fuente push-pull.
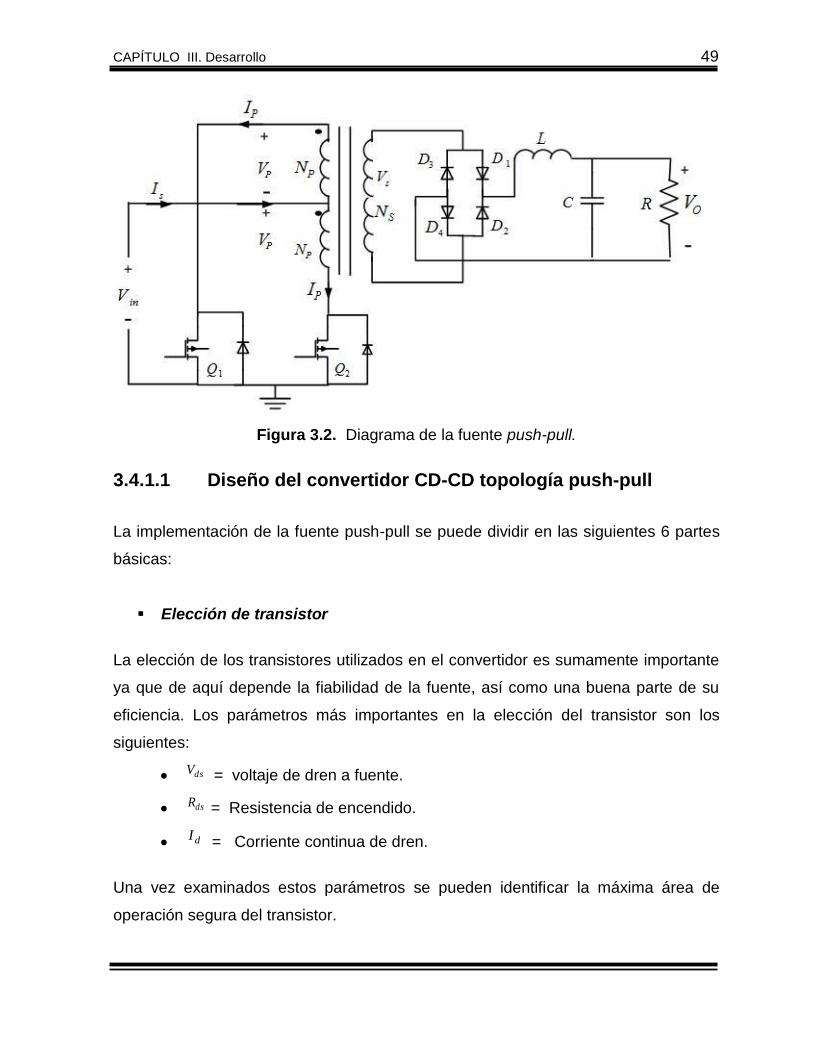
CAPÍTULO III. Desarrollo 49
Figura 3.2. Diagrama de la fuente push-pull.
3.4.1.1 Diseño del convertidor CD-CD topología push-pull
La implementación de la fuente push-pull se puede dividir en las siguientes 6 partes
básicas:
Elección de transistor
La elección de los transistores utilizados en el convertidor es sumamente importante
ya que de aquí depende la fiabilidad de la fuente, así como una buena parte de su
eficiencia. Los parámetros más importantes en la elección del transistor son los
siguientes:
dsV = voltaje de dren a fuente.
dsR = Resistencia de encendido.
dI = Corriente continua de dren.
Una vez examinados estos parámetros se pueden identificar la máxima área de
operación segura del transistor.
CAPÍTULO III. Desarrollo 50
El transistor elegido fue el MOSFET IRFP150N, cuenta con los siguientes
parámetros:
dsV = 100 V.
dsR = 0.036 Ω.
dI = 42 A.
Un nivel bajo en el dsR del transistor disminuye significativamente las pérdidas en el
convertidor. El Vds está por arriba de 2 veces la capacidad máxima de la fuente al
igual que la corriente dI asegurando que el transistor trabaje en su área de
operación segura.
Diseño del transformador
El diseño del transformador es la parte más importante del convertidor. El objetivo del
transformador es elevar el voltaje de entrada iV a un voltaje de salida oV . De igual
manera tiene la función de proporcionar el aislamiento necesario entre la entrada y la
salida de la fuente push-pull. En la sección 3.4.2 se da una explicación detallada de
los pasos seguidos en la implementación del transformador.
Implementación del rectificador
El objetivo del rectificador implementado es convertir la señal de CA en el devanado
secundario del transformador a un voltaje de corriente directa CD.
Para la implementación del convertidor puente completo es importante tomar en
cuenta la velocidad de conmutación de los diodos rectificadores, al igual que el
voltaje de operación.
El diodo utilizado es el ST-806DT. El cual es un diodo de recuperación rápida.
Implementación del filtro LC
CAPÍTULO III. Desarrollo 51
La implementación del filtro LC tiene el propósito de disminuir el rizo de voltaje
presente en la salida del rectificador de onda completa. En la sección 3.4.4 se da una
descripción detallada sobre la manera en que se implementó.
Desarrollo del PCB para el convertidor.
El diseño de la placa en el que se implementó la fuente push-pull es parte primordial
para su buen funcionamiento. Uno de los principales cuidados que se debe de tener
al realizar placas de potencia es cuidar las inductancias que se pueden presentar en
las pistas. Es decir una línea muy larga en el diseño del PCB incrementará las
inductancias. De igual manera la colocación estratégica de la fuente push-pull en
especial el transformador, separándolo por una distancia prudente de la parte digital
en la cual se generan los disparos, esta medida evitará problemas de inducción
electromagnética en los disparos del convertidor o en cualquier circuito externo a la
fuente push-pull.
El software de desarrollo elegido para la placa de circuito impreso fue PROTEUS
v7.1 En el apéndice B se muestra el diagrama esquemático del sistema
implementado
Desarrollo de circuitos de protección.
Los circuitos de protección son parte importante para el correcto funcionamiento de
la fuente. La eliminación de ruidos y la atenuación de picos indeseados en las
conmutaciones de los transistores, así como la reducción de las inductancias
dispersas presentes en la fuente, ayudan de manera significativa a mejorar la
eficiencia de la fuente. En la sección 3.4.3 se aborda el tema detalladamente.
3.4.1.2 Implementación del convertidor CD-CD topología push-pull
La figura 3.3 muestra la implementación de la parte de potencia en la placa de
circuito impreso.

CAPÍTULO III. Desarrollo 52
Figura 3.3 Implementación de la parte de potencia en la placa del circuito
Impreso.
3.4.2 Transformador
El transformador es la parte más importantes en las fuentes con aislamiento en alta
frecuencia como lo es la fuente push-pull. Su objetivo es elevar un voltaje de entrada
iV a un voltaje de salida oV . El propósito de conmutar a una frecuencia alta,
aproximadamente 100 kHz, es reducir el tamaño del transformador. La relación de
transformación la cual se define como el número de vueltas del primario entre el
número de vueltas del secundario, se estableció a partir de la relación entre los
voltajes de entrada y salida de la fuente. Es importante mencionar que en un
transformador ideal no se encuentran pérdidas en el núcleo, no existe reluctancia en
el núcleo, no se presentan pérdidas en los devanados de cobre, entre otro tipo de
pérdidas. Por lo tanto es importante tomarlas en cuenta para el diseño del
CAPÍTULO III. Desarrollo 53
transformador. Entre mayor sea la permeabilidad del núcleo existirá un mejor
acoplamiento entre él. Es por eso que es de suma importancia la elección del núcleo.
La elección del núcleo se baso en parámetros importantes como lo es la
permeabilidad la cual está estrechamente relacionada con la frecuencia.
El núcleo del transformador es de oxido metálico o ferrita, el tipo de núcleo usado es
de iron powder el modelo del núcleo es t201-52. Distribuido por Micrometals, Inc [1].
Para obtener más información acerca de las características del núcleo ver referencia
[2].
3.4.2.1 Diseño del transformador
Un trasformador costa de dos partes importantes el núcleo magnético y los
devanados. Es importante hacer una correcta elección del núcleo según las
necesidades de la planta, por ejemplo se podría suponer que un núcleo con mayor
permeabilidad es siempre mejor pero realmente un núcleo con permeabilidad alta
tiende a saturarse más rápido que con permeabilidades más bajas. Otro punto
importante es la frecuencia a la que va trabajar el transformador, es importante
establecer una frecuencia óptima para el transformador, no necesariamente una
frecuencia alta es mejor, debido a que a mayor frecuencia aumenta las pérdidas por
histéresis, esto es debido a que el tiempo en que tardan en reacomodarse los
dominios de los átomos en el núcleo es menor a mayores frecuencias.
Una vez elegido el núcleo con las características ideales para trabajar en el. Se
procede al embobinado.
Los parámetros más importantes para el diseño de los devanados del transformador
a alta frecuencia son los siguientes:
Frecuencia de conmutación, sf .
El voltaje de entrada, iV .
El voltaje de salida, oV .
Potencia de entrada, iP .
Características del núcleo.
CAPÍTULO III. Desarrollo 54
Tomando en cuenta el voltaje de entrada y el voltaje de salida deseado del
transformador se obtuvo la relación de transformación necesaria. La ecuación (2.11)
muestra la relación de transformación.
El voltaje de entrada para la fuente son 24 V y el voltaje de salida deseado es 170 V,
sin embargo es necesario considerar las pérdidas en el núcleo, así como las
pérdidas en los devanados del transformador, por lo tanto se supone un voltaje de
salida de 220 V, esto también con el objetivo de tener un rango de voltajes más
amplio evitando que los transistores trabajen con un ciclo útil cercano al 50%. La
ecuación (3.1) muestra la relación de transformación.
924
220
2
1 N
Na (3.1)
La relación de transformación resultante 9a , se toma como base para calcular el
número de vueltas del devanado secundario. Es importante mencionar que la
relación de transformación final implementada en el proyecto es de 10.
El transformador se construyo con dos devanados primarios y uno de salida debido a
las características deseadas de las fuentes push-pull. Es decir se requiere que el
voltaje promedio de salida sea igual 220 V máximo.
Los devanados primarios se construyendo siguiendo una metodología de prueba, es
decir, si el número de vueltas del primario no son las suficientes para conseguir el
flujo magnético necesario. Se optaba por incrementar el número de vueltas de los
devanados primarios.
Los devanados primarios resultantes se desarrollaron con 17 vueltas de entrada, de
este modo asegurando que el flujo magnético sea lo suficientemente grande para
inducir magnéticamente al devanado secundario.
Utilizando la relación de transformación y el número de vueltas de los devanados
primarios, se puede obtener el número de vueltas del devanado secundario.
Despegando 2N de la ecuación (2.11), se obtiene:
aNN 12 (3.2)
CAPÍTULO III. Desarrollo 55
En donde,
1N = Número de vueltas del los devanados primarios.
2N = Número de vueltas de devanado secundario.
a = Relación de transformación.
Sustituyendo valores:
.17010172 vueltasN (3.3)
Una vez calculado el número de vueltas de los devanados primarios y el devanado
secundario, se procede a seleccionar el calibre del alambre conductor utilizado
(cobre).
Para la determinación del calibre del alambre para el devanado primario se necesitan
conocer los siguientes parámetros:
Potencia de entrada iP .
El voltaje de salida oV .
Potencia de salida oP .
Una vez identificada la potencia máxima de salida en el convertidor, la cual es igual a
200 W. Se puede obtener la corriente para el devanado secundario a partir de la
ecuación (3.4).
o
o
V
pi (3.4)
En donde,
i = Corriente secundario.
op = Potencia salida.
oV = Voltaje salida.
Sustituyendo valores:
CAPÍTULO III. Desarrollo 56
AV
Wi 73.1
170
200
(3.5)
Suponiendo que la potencia de entrada y la potencia de salida son prácticamente
igual, es decir con muy pocas pérdidas. Se puede tener una aproximado de la
corriente de entrada.
El voltaje de entrada es igual a 24 V y suponiendo una potencia de entrada de 200
W, se puede obtener la corriente de entrada, la ecuación (3.6) representa la corriente
de entrada en los devanados primarios.
AV
Wi 33.8
24
200 (3.6)
Una vez identificadas las corrientes que circulan por cada devanado primario, y
secundario, se establecen los calibres necesarios para manejar ese flujo de
corrientes.
Los devanados primarios se construyeron con un calibre 12 adecuado para manejar
las corrientes calculadas, al igual el devanado primario se construyó con un calibre
15.
En el proceso de embobinar es importante mencionar la técnica. Primero se procede
a embobinar el devanado primario con el objetivo de colocar al devanado secundario
encima del primario para que el devanado secundario pueda abrazar al devanado
primario y que lo pueda inducir magnéticamente, de esta manera se puede disminuir
al mínimo la dispersión del flujo obteniendo una mayor eficiencia.
Otro punto importante en el embobinado es tratar de abarcar la mayor área posible
en el núcleo teniendo como propósito la trasferencia total de energía y aumentar la
fuerza magnetomotriz.
3.4.3 Reducción del ruido en el convertidor push-pull
A continuación se presentan los métodos empleados para disminuir los ruidos
presentes en el convertidor push-pull.
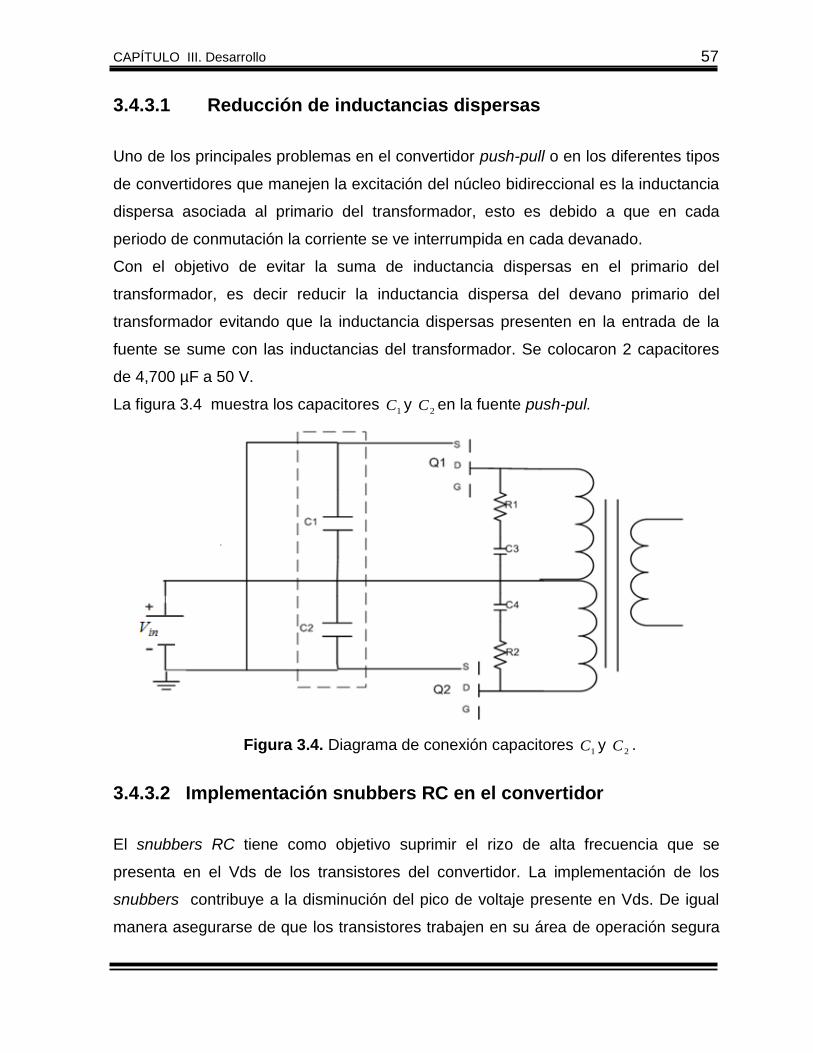
CAPÍTULO III. Desarrollo 57
3.4.3.1 Reducción de inductancias dispersas
Uno de los principales problemas en el convertidor push-pull o en los diferentes tipos
de convertidores que manejen la excitación del núcleo bidireccional es la inductancia
dispersa asociada al primario del transformador, esto es debido a que en cada
periodo de conmutación la corriente se ve interrumpida en cada devanado.
Con el objetivo de evitar la suma de inductancia dispersas en el primario del
transformador, es decir reducir la inductancia dispersa del devano primario del
transformador evitando que la inductancia dispersas presenten en la entrada de la
fuente se sume con las inductancias del transformador. Se colocaron 2 capacitores
de 4,700 µF a 50 V.
La figura 3.4 muestra los capacitores 1C y
2C en la fuente push-pul.
Figura 3.4. Diagrama de conexión capacitores 1C y
2C .
3.4.3.2 Implementación snubbers RC en el convertidor
El snubbers RC tiene como objetivo suprimir el rizo de alta frecuencia que se
presenta en el Vds de los transistores del convertidor. La implementación de los
snubbers contribuye a la disminución del pico de voltaje presente en Vds. De igual
manera asegurarse de que los transistores trabajen en su área de operación segura
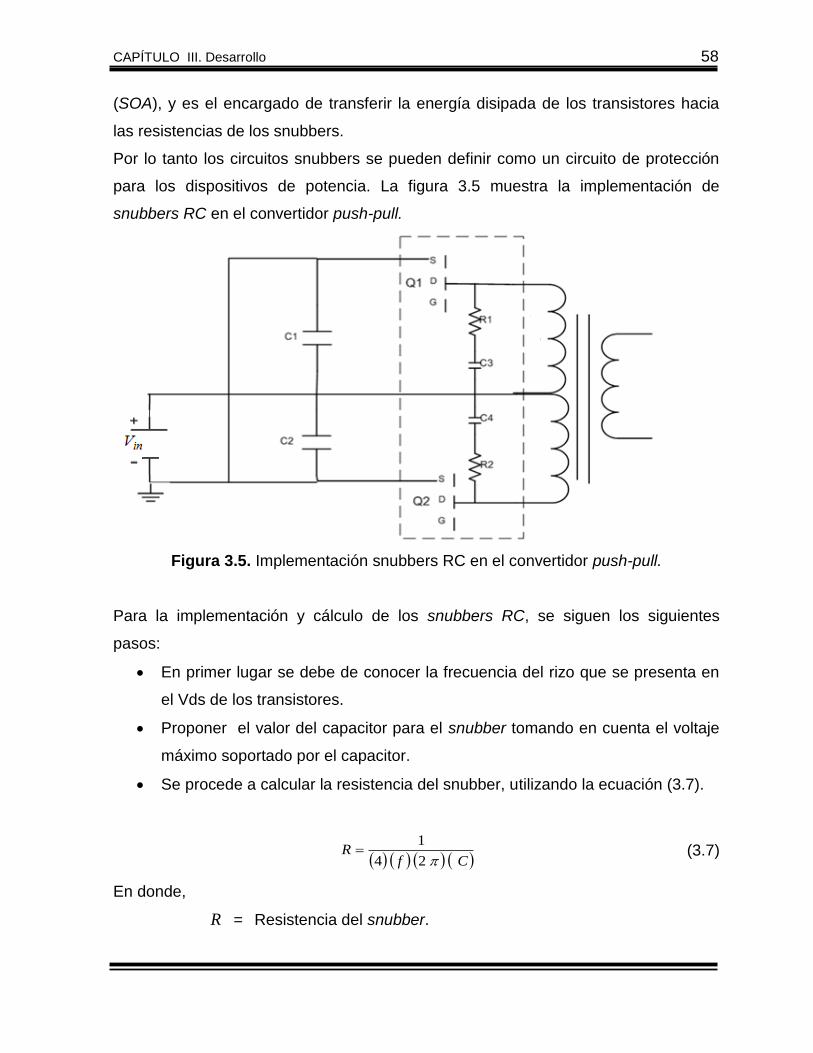
CAPÍTULO III. Desarrollo 58
(SOA), y es el encargado de transferir la energía disipada de los transistores hacia
las resistencias de los snubbers.
Por lo tanto los circuitos snubbers se pueden definir como un circuito de protección
para los dispositivos de potencia. La figura 3.5 muestra la implementación de
snubbers RC en el convertidor push-pull.
Figura 3.5. Implementación snubbers RC en el convertidor push-pull.
Para la implementación y cálculo de los snubbers RC, se siguen los siguientes
pasos:
En primer lugar se debe de conocer la frecuencia del rizo que se presenta en
el Vds de los transistores.
Proponer el valor del capacitor para el snubber tomando en cuenta el voltaje
máximo soportado por el capacitor.
Se procede a calcular la resistencia del snubber, utilizando la ecuación (3.7).
CfR
24
1 (3.7)
En donde,
R = Resistencia del snubber.
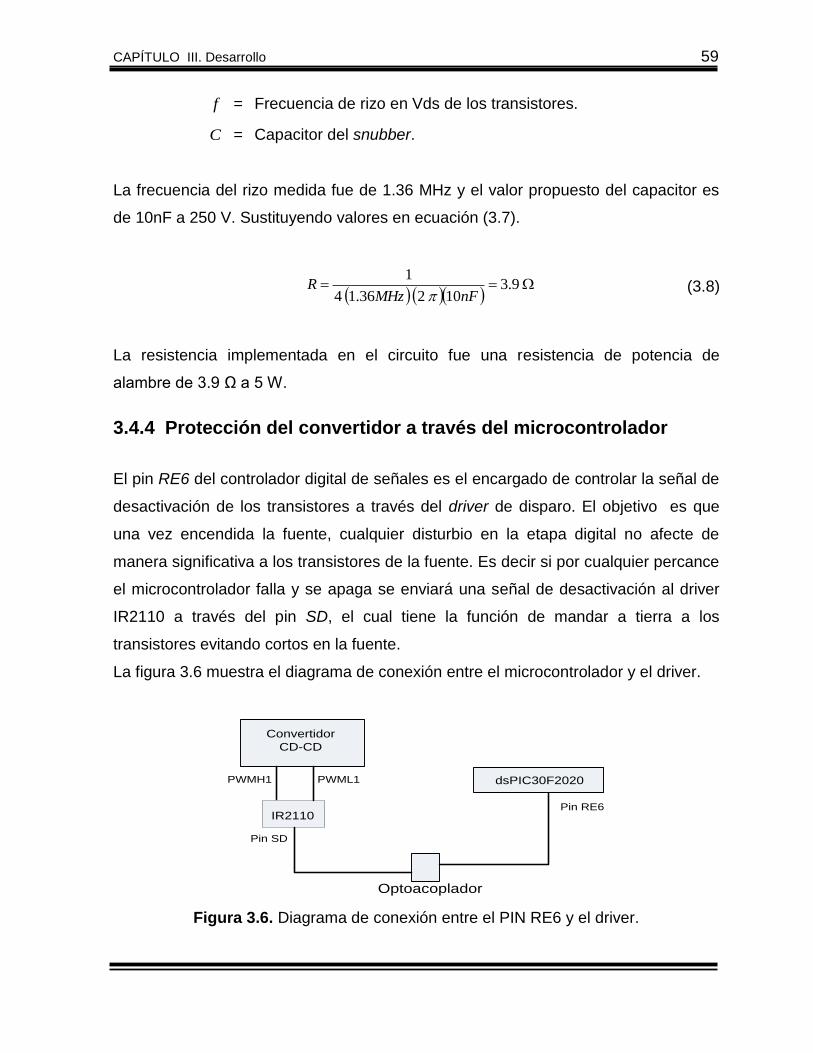
CAPÍTULO III. Desarrollo 59
f = Frecuencia de rizo en Vds de los transistores.
C = Capacitor del snubber.
La frecuencia del rizo medida fue de 1.36 MHz y el valor propuesto del capacitor es
de 10nF a 250 V. Sustituyendo valores en ecuación (3.7).
9.3
10236.14
1
nFMHzR
(3.8)
La resistencia implementada en el circuito fue una resistencia de potencia de
alambre de 3.9 Ω a 5 W.
3.4.4 Protección del convertidor a través del microcontrolador
El pin RE6 del controlador digital de señales es el encargado de controlar la señal de
desactivación de los transistores a través del driver de disparo. El objetivo es que
una vez encendida la fuente, cualquier disturbio en la etapa digital no afecte de
manera significativa a los transistores de la fuente. Es decir si por cualquier percance
el microcontrolador falla y se apaga se enviará una señal de desactivación al driver
IR2110 a través del pin SD, el cual tiene la función de mandar a tierra a los
transistores evitando cortos en la fuente.
La figura 3.6 muestra el diagrama de conexión entre el microcontrolador y el driver.
dsPIC30F2020
Optoacoplador
IR2110
Convertidor
CD-CD
Pin SD
Pin RE6
PWMH1 PWML1
Figura 3.6. Diagrama de conexión entre el PIN RE6 y el driver.
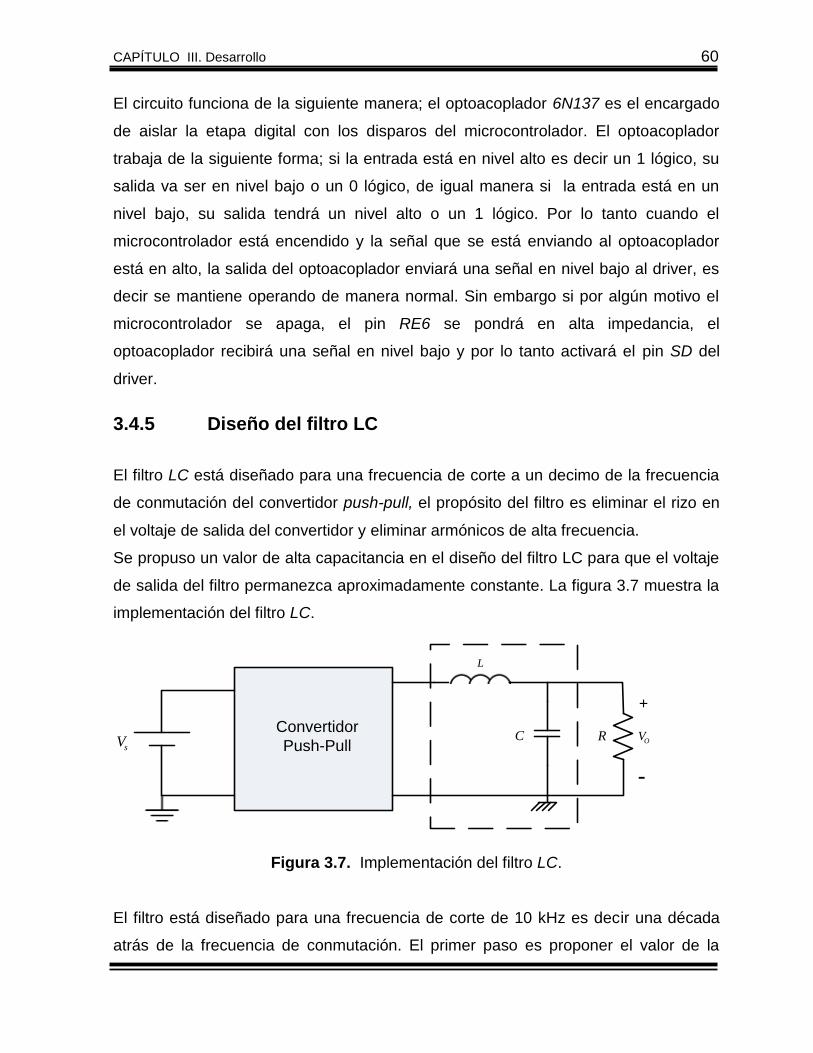
CAPÍTULO III. Desarrollo 60
El circuito funciona de la siguiente manera; el optoacoplador 6N137 es el encargado
de aislar la etapa digital con los disparos del microcontrolador. El optoacoplador
trabaja de la siguiente forma; si la entrada está en nivel alto es decir un 1 lógico, su
salida va ser en nivel bajo o un 0 lógico, de igual manera si la entrada está en un
nivel bajo, su salida tendrá un nivel alto o un 1 lógico. Por lo tanto cuando el
microcontrolador está encendido y la señal que se está enviando al optoacoplador
está en alto, la salida del optoacoplador enviará una señal en nivel bajo al driver, es
decir se mantiene operando de manera normal. Sin embargo si por algún motivo el
microcontrolador se apaga, el pin RE6 se pondrá en alta impedancia, el
optoacoplador recibirá una señal en nivel bajo y por lo tanto activará el pin SD del
driver.
3.4.5 Diseño del filtro LC
El filtro LC está diseñado para una frecuencia de corte a un decimo de la frecuencia
de conmutación del convertidor push-pull, el propósito del filtro es eliminar el rizo en
el voltaje de salida del convertidor y eliminar armónicos de alta frecuencia.
Se propuso un valor de alta capacitancia en el diseño del filtro LC para que el voltaje
de salida del filtro permanezca aproximadamente constante. La figura 3.7 muestra la
implementación del filtro LC.
Convertidor
Push-PullOV
+
-
R
L
CsV
Figura 3.7. Implementación del filtro LC.
El filtro está diseñado para una frecuencia de corte de 10 kHz es decir una década
atrás de la frecuencia de conmutación. El primer paso es proponer el valor de la
CAPÍTULO III. Desarrollo 61
capacitancia del filtro, el cual es de 330 µF. El valor del inductor se calculó a partir de
la ecuación (2.12).
.767
3302
12
HFf
L
(3.9)
3.4.6 Sensado y adecuación en la señal de retroalimentación
El sensado de la señal se da a través de un sensor pasivo el cual tiene una
atenuación de 44 veces a la señal de entrada, es decir para un voltaje máximo de
salida igual a 220 V el voltaje máximo de sensor es igual a 5 V.
Otra de las etapas importantes en la adecuación de la señal es el acoplador de
impedancias el cual tiene la función de lograr una eficaz transferencia de potencia de
una etapa a otra etapa la cual se logra cuando las impedancias se acoplan o igualan.
El acoplador de impedancias se desarrollo a través del amplificador operacional
LM324N.
3.4.6.1 Divisor resistivo
El primer paso para implementar el divisor resistivo es proponer un valor de
resistencia 2R , el valor propuesto fue de 4.7 kΩ. La ecuación (3.10) representa la
fórmula del divisor resistivo.
ino VRR
RV
21
2
(3.10)
En donde:
0V = Valor máximo de voltaje de salida.
inV = Valor máximo de entrada.
2R = Valor resistencia
2R .
1R = Valor resistencia
1R .
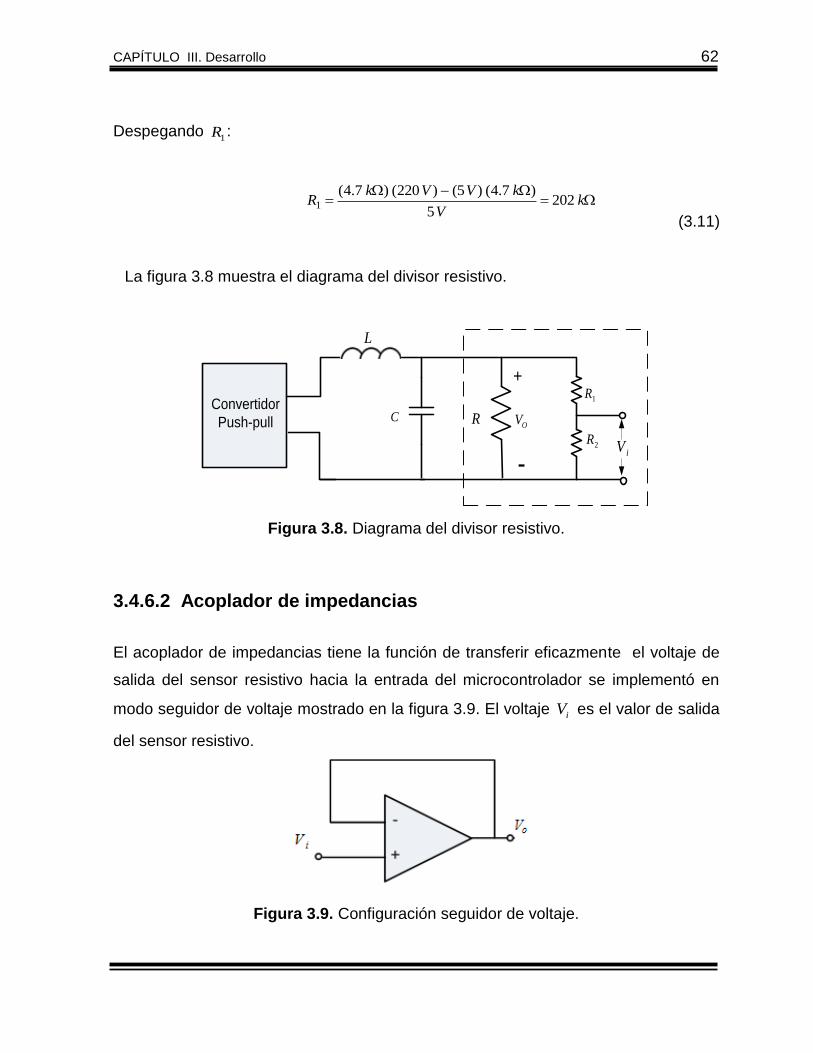
CAPÍTULO III. Desarrollo 62
Despegando 1R :
kV
kVVkR 202
5
)7.4()5()220()7.4(1
(3.11)
La figura 3.8 muestra el diagrama del divisor resistivo.
OV
+
-
R
L
C
1R
2RiV
Convertidor
Push-pull
Figura 3.8. Diagrama del divisor resistivo.
3.4.6.2 Acoplador de impedancias
El acoplador de impedancias tiene la función de transferir eficazmente el voltaje de
salida del sensor resistivo hacia la entrada del microcontrolador se implementó en
modo seguidor de voltaje mostrado en la figura 3.9. El voltaje iV es el valor de salida
del sensor resistivo.
Figura 3.9. Configuración seguidor de voltaje.
CAPÍTULO III. Desarrollo 63
3.5 Etapa digital
A continuación se da una descripción detallada de todos los pasos utilizados para
programar el controlador digital de señales, se describen los algoritmos
implementados en el microcontrolador (algoritmo de control, algoritmo de filtrado y
despliegue) así como las configuraciones de cada uno de los módulos (módulo
PWM, módulo ADC, módulo timers) usados en el procesador digital de señales.
El objetivo del programa es controlar el voltaje de salida del convertidor CD-CD, filtrar
digitalmente la señal proveniente del sensor resistivo y desplegar el voltaje sensado
en un LCD. Se utilizó la siguiente metodología:
Elección del dispositivo a utilizar.
Elección del lenguaje de programación a utilizar.
Elección del simulador y compilador del lenguaje elegido.
Desarrollo del programa.
Implementación del circuito del microcontrolador.
3.5.1 Elección del dispositivo a utilizar
El dispositivo utilizado en el desarrollo de esta tesis es el controlador digital de
señales dsPIC30F2020 de la familia dsPIC30F de Microchip technology inc. La figura
2.16 muestra el diagrama de pines del dsPIC30F2020 empaquetado SPDIP.
Particularmente la elección del microcontrolador dsPIC30F2020 fue tomada debido a
que una de sus principales características se encuentra en el módulo PWM que
puede ser utilizado en modo push-pull es decir no es necesario generar por software
las señales de disparo para el convertidor.
Otra de las principales características del microcontrolador es su alta velocidad de
procesamiento de 30 MIPS (millions of instructions per second) efectuando
operaciones en 1 ciclo máquina en (33.33ns) Cuenta con un módulo ADC con una
resolución de 10 bits y una frecuencia máxima de muestro de 750 Kbps por canal
[3].
Este dispositivo está optimizado para controlar convertidores de potencia.
CAPÍTULO III. Desarrollo 64
3.5.2 Elección del lenguaje de programación a utilizar
El lenguaje elegido para el desarrollo del programa es el lenguaje C. Con este
lenguaje se tiene la facilidad de realizar operación matemáticas de una forma
sencilla. El lenguaje C proporciona una enorme cantidad de potencia y flexibilidad ya
que se define como un lenguaje de programación estructurado de propósito general.
3.5.3 Elección del Simulador y compilador del lenguaje elegido
El software de desarrollo elegido es el MPLAB Integrated Development Enviroment
(IDE) v8.1 de Microchip Technology Inc. El compilador a utilizar es el MPLAB C30
compiler v3.02, es un compilador de lenguaje C para dispositivos de la familias
dsPIC24, dsPIC30F y dsPIC33F.
3.5.4 Desarrollo del programa
El objetivo del programa es controlar el voltaje de salida del convertidor CD-CD, a
través de un control del tipo proporcional- integral. Explicado en la sección 2.8.1 del
marco teórico. Otra de las principales funciones del programa es filtrar la señal de
sensado proveniente del ADC a través de un filtro FIR (finite impulse response)
explicado en la sección 2.7 del marco teórico. Además el programa ejecuta la función
de desplegar el voltaje de salida del convertidor a través de un LCD conectado al
puerto B del microcontrolador. Para lograr estos objetivos el programa está
configurado para trabajar a una velocidad 29.1 MIPS. Utilizando el oscilador interno
FRC (internal fast RC oscillator) con módulo PLL (phase locked loop) activado. El
módulo PWM está programado para trabajar en modo push-pull a una frecuencia de
93 kHz. La rutina de interrupción del ADC es activada por el trigger del módulo PWM
teniendo como objetivo controlar el punto donde se toma la muestra. La
retroalimentación del convertidor es a través del canal AN0. La muestra del ADC es
obtenida a 22 kHz. La interrupción del timer 2 es la encargada de filtrar la señal
proveniente del módulo ADC a 5 kHz y de activar la señal de actualización del
CAPÍTULO III. Desarrollo 65
LCD a 1 Hz. La interrupción del timer 3 es el encargado de efectuar el algoritmo de
control PI ejecutándose a 500 Hz.
3.5.4.1 Nomenclatura de funciones, variables y constantes
El presente código está escrito de una forma estructurada lo cual le da precisión y
claridad, evitando ambigüedades teniendo una estructura de programa fácil de leer
puesto que las instrucciones están más ligadas y relacionadas entre ellas.
Las constantes y variables están escritas como se muestra en la figura 3.10 la cual
representa la forma en la declaración de las variables y constantes.
MODULO ó FUNCION ParaQueSeUtiliza - QueEsLoQueHace_
Caracteristica 1 Caracteristica 2
Figura 3.10. Nomenclatura de variables y constantes.
Característica 1: se escribe con mayúscula e indican que la variable ó constante está
ligada a dicho módulo del microcontrolador, o indica a qué función pertenece la
variable o constante en el programa.
Característica 2: la primera letra de cada palabra se escribe con mayúscula. Indica
para qué se utiliza o qué es lo que hace dentro de la función del programa o módulo
del microcontrolador.
En la figura 3.11 se presenta un ejemplo de nomenclatura de las variables y
constantes.
CONTROL_GananciaProporcinal
Proviene de la
función controlSe utiliza como ganancia
proporcional dentro de la
función control
Figura 3.11. Ejemplo de nomenclatura de variables y constantes.
CAPÍTULO III. Desarrollo 66
Las funciones del programa están escritas siguiendo un método muy similar al
método de las constantes y variables.
La figura 3.12 representa la forma de declaración de las funciones dentro del
programa.
LUGAR QueEsLoQueHace_
Caracteristica 1 Caracteristica 2
Figura 3.12. Nomenclatura de funciones.
Característica 1: siempre se escribe con mayúscula e indica el lugar al que pertenece
dicha función.
Característica 2: la primera letra de cada palabra se escribe con mayúscula e indica
lo que hace la función.
En la figura 3.13 se presenta un ejemplo de nomenclatura de las funciones.
LCD _ SendDato
Ejecuta la
funcion
LCD
Envia
datos al
LCD.
Figura 3.13. Ejemplo de nomenclatura de funciones.
3.5.4.2 Ejecución del programa en general.
Se enlistan los pasos ejecutados por el programa en el orden en que el inicializa.
Declaración de constantes y variables.
Declaración de funciones prototipo.
Programa principal.
Espera interrupción del ADC, temporizador 2 y temporizador 3.
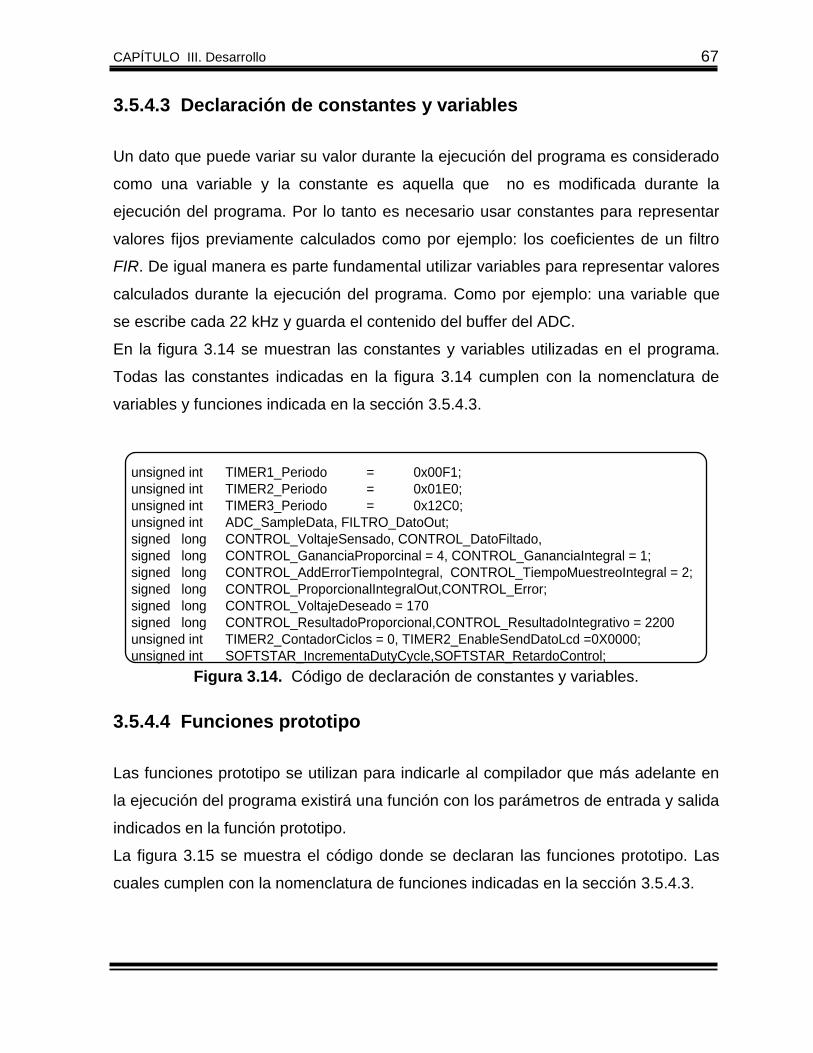
CAPÍTULO III. Desarrollo 67
3.5.4.3 Declaración de constantes y variables
Un dato que puede variar su valor durante la ejecución del programa es considerado
como una variable y la constante es aquella que no es modificada durante la
ejecución del programa. Por lo tanto es necesario usar constantes para representar
valores fijos previamente calculados como por ejemplo: los coeficientes de un filtro
FIR. De igual manera es parte fundamental utilizar variables para representar valores
calculados durante la ejecución del programa. Como por ejemplo: una variable que
se escribe cada 22 kHz y guarda el contenido del buffer del ADC.
En la figura 3.14 se muestran las constantes y variables utilizadas en el programa.
Todas las constantes indicadas en la figura 3.14 cumplen con la nomenclatura de
variables y funciones indicada en la sección 3.5.4.3.
unsigned int TIMER1_Periodo = 0x00F1;
unsigned int TIMER2_Periodo = 0x01E0;
unsigned int TIMER3_Periodo = 0x12C0;
unsigned int ADC_SampleData, FILTRO_DatoOut;
signed long CONTROL_VoltajeSensado, CONTROL_DatoFiltado,
signed long CONTROL_GananciaProporcinal = 4, CONTROL_GananciaIntegral = 1;
signed long CONTROL_AddErrorTiempoIntegral, CONTROL_TiempoMuestreoIntegral = 2;
signed long CONTROL_ProporcionalIntegralOut,CONTROL_Error;
signed long CONTROL_VoltajeDeseado = 170
signed long CONTROL_ResultadoProporcional,CONTROL_ResultadoIntegrativo = 2200
unsigned int TIMER2_ContadorCiclos = 0, TIMER2_EnableSendDatoLcd =0X0000;
unsigned int SOFTSTAR_IncrementaDutyCycle,SOFTSTAR_RetardoControl;
Figura 3.14. Código de declaración de constantes y variables.
3.5.4.4 Funciones prototipo
Las funciones prototipo se utilizan para indicarle al compilador que más adelante en
la ejecución del programa existirá una función con los parámetros de entrada y salida
indicados en la función prototipo.
La figura 3.15 se muestra el código donde se declaran las funciones prototipo. Las
cuales cumplen con la nomenclatura de funciones indicadas en la sección 3.5.4.3.
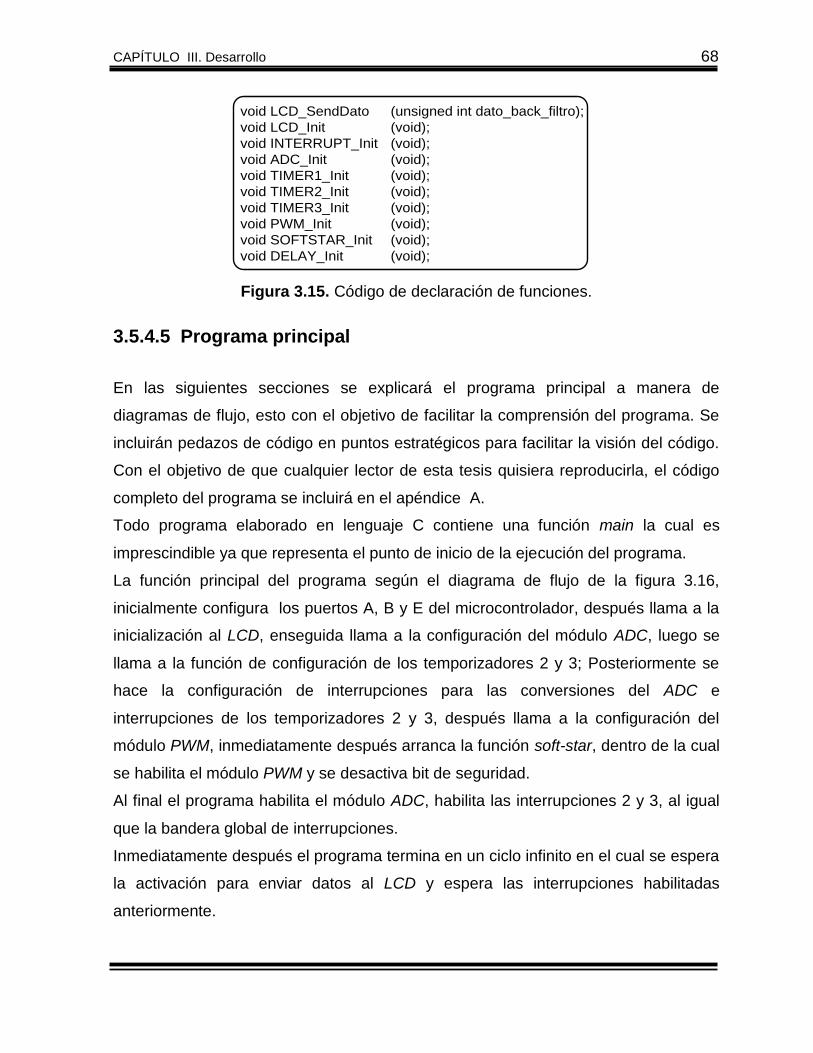
CAPÍTULO III. Desarrollo 68
void LCD_SendDato (unsigned int dato_back_filtro);
void LCD_Init (void);
void INTERRUPT_Init (void);
void ADC_Init (void);
void TIMER1_Init (void);
void TIMER2_Init (void);
void TIMER3_Init (void);
void PWM_Init (void);
void SOFTSTAR_Init (void);
void DELAY_Init (void);
Figura 3.15. Código de declaración de funciones.
3.5.4.5 Programa principal
En las siguientes secciones se explicará el programa principal a manera de
diagramas de flujo, esto con el objetivo de facilitar la comprensión del programa. Se
incluirán pedazos de código en puntos estratégicos para facilitar la visión del código.
Con el objetivo de que cualquier lector de esta tesis quisiera reproducirla, el código
completo del programa se incluirá en el apéndice A.
Todo programa elaborado en lenguaje C contiene una función main la cual es
imprescindible ya que representa el punto de inicio de la ejecución del programa.
La función principal del programa según el diagrama de flujo de la figura 3.16,
inicialmente configura los puertos A, B y E del microcontrolador, después llama a la
inicialización al LCD, enseguida llama a la configuración del módulo ADC, luego se
llama a la función de configuración de los temporizadores 2 y 3; Posteriormente se
hace la configuración de interrupciones para las conversiones del ADC e
interrupciones de los temporizadores 2 y 3, después llama a la configuración del
módulo PWM, inmediatamente después arranca la función soft-star, dentro de la cual
se habilita el módulo PWM y se desactiva bit de seguridad.
Al final el programa habilita el módulo ADC, habilita las interrupciones 2 y 3, al igual
que la bandera global de interrupciones.
Inmediatamente después el programa termina en un ciclo infinito en el cual se espera
la activación para enviar datos al LCD y espera las interrupciones habilitadas
anteriormente.
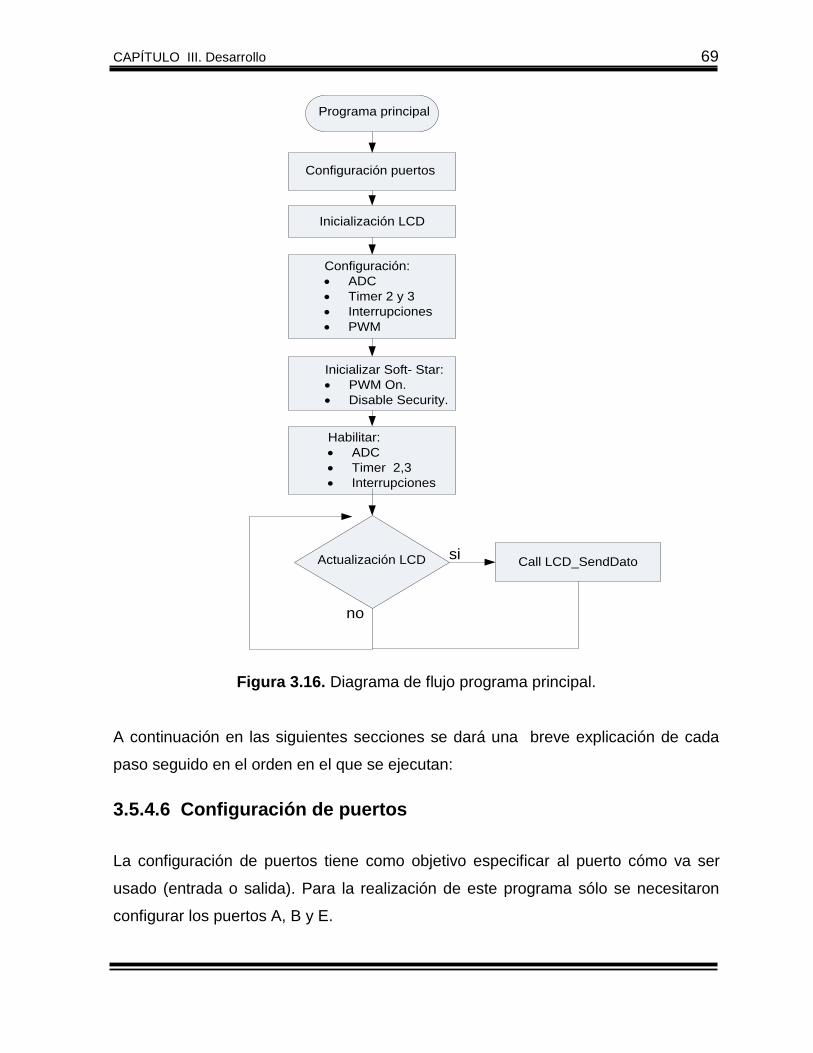
CAPÍTULO III. Desarrollo 69
Programa principal
Configuración puertos
Inicialización LCD
Configuración:
ADC
Timer 2 y 3
Interrupciones
PWM
Inicializar Soft- Star:
PWM On.
Disable Security.
Habilitar:
ADC
Timer 2,3
Interrupciones
Actualización LCD Call LCD_SendDatosi
no
Figura 3.16. Diagrama de flujo programa principal.
A continuación en las siguientes secciones se dará una breve explicación de cada
paso seguido en el orden en el que se ejecutan:
3.5.4.6 Configuración de puertos
La configuración de puertos tiene como objetivo especificar al puerto cómo va ser
usado (entrada o salida). Para la realización de este programa sólo se necesitaron
configurar los puertos A, B y E.
CAPÍTULO III. Desarrollo 70
El canal AN0 del puerto A se configura como entrada ya que por medio de este canal
el módulo ADC realiza el muestreo y es así como el convertidor queda en lazo
cerrado.
Los pines RB1-RB7 del puerto B se configuran como salidas, a través de estos pines
de propósito general se establece la comunicación entre el microcontrolador y el
LCD. Los pines RB4-RB7 se utilizan para la transferencia de datos. Los pines RB1-
RB3, se usan para enviar comandos al LCD.
Los pines RE0 y RE1 se configuran como salida, a través de estos pines se manda
las señales de disparo a los transistores del convertidor.
3.5.4.7 Inicialización del LCD
La configuración del display en este punto del programa tiene el objetivo de
establecer las configuraciones requeridas para que en un punto futuro el programa
despliegue el voltaje de salida del convertidor. Otro de su objetivo es desplegar un
mensaje con la palabra “IGNITION” la cual se refiere a que el sistema está
encendido.
El LCD se implementó en modo de 4 bits es decir la transmisión de datos del
microcontrolador hacia el display se realiza enviando únicamente un nibble a la vez
por los pines (RB4-RB7), del microcontrolador.
La inicialización del LCD se da conforme lo indica el fabricante en su hoja de datos
[4]. En primer lugar se selecciona el modo en que va operar (4–8 bits), en segundo
lugar se mandan los comandos de control. Una vez seleccionado el modo y los
comandos de control enviados, el LCD está listo para enviar ó recibir datos.
La metodología de inicialización del display se puede observar en la figura 3.17 que
representa el código de inicialización por medio de un diagrama de flujo
La rutina de envió de datos del microcontrolador hacia el LCD se da a través de la
función LCD_SendDato. La representación de la función LCD_SendDato se muestra
en forma de diagrama de flujo en la figura 3.18.
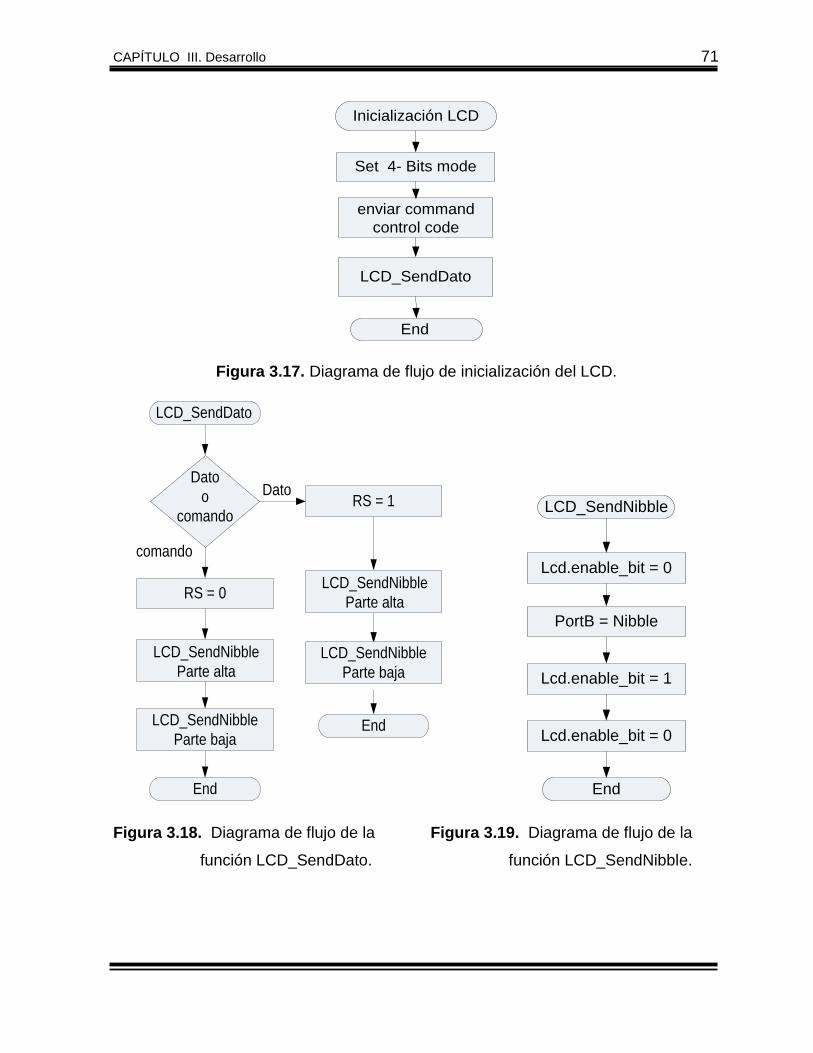
CAPÍTULO III. Desarrollo 71
Inicialización LCD
Set 4- Bits mode
enviar command
control code
End
LCD_SendDato
Figura 3.17. Diagrama de flujo de inicialización del LCD.
LCD_SendDato
Dato
o
comando
RS = 0
RS = 1
LCD_SendNibble
Parte alta
LCD_SendNibble
Parte baja
End
End
LCD_SendNibble
Parte alta
LCD_SendNibble
Parte baja
Dato
comando
LCD_SendNibble
End
Lcd.enable_bit = 0
Lcd.enable_bit = 0
PortB = Nibble
Lcd.enable_bit = 1
Figura 3.18. Diagrama de flujo de la
función LCD_SendDato.
Figura 3.19. Diagrama de flujo de la
función LCD_SendNibble.
CAPÍTULO III. Desarrollo 72
3.5.4.8 Configuración del módulo ADC
La configuración del módulo ADC del microcontrolador dsPIC30F2020 tiene como
objetivo muestrear el canal AN0 que es donde llega la señal de voltaje proveniente
del divisor resistivo conectado a la salida del convertidor CD-CD.
De las principales características del convertidor analógico – digital es que maneja
una resolución de 10 bits es decir un número igual a N2 donde N es el número de
bits de resolución. Por lo tanto el rango decimal que podemos obtener en la
conversión del canal AN0 está entre (0 – 1024). La resolución con la que se trabaja
es de 8 bits, los 2 bits menos significativos se omiten con el objetivo de evitar
variaciones indeseadas producidas por ruidos del sistema, de esta manera se logra
un mejor control del convertidor, perdiendo resolución pero ganando estabilidad.
El módulo PWM se toma como fuente de disparo para el encendido del ADC, de
esta manera se puede controlar el tiempo donde el convertidor analógico- digital
empiece a convertir la siguiente muestra todo esto con el objetivo de tener un mejor
control de la fuente evitando el ruido producido. El ADC se dispara cada 23 kHz por
el módulo PWM. (En la configuración sección 3.5.4.11 del módulo PWM se explicará
detalladamente).
La configuración del módulo ADC para seleccionar la fuente de disparo se da a
través del registro ADCPC0. La figura 3.20 muestra el código donde se configura el
registro de selección de disparo.
ADCPC0bits.TRGSRC0 = 0x4; // PWM Trigger #1
Figura 3.20. Código de configuración del modo de disparo del ADC.
La frecuencia de conversión elegida es de 24 MHz teniendo un tiempo de conversión
por canal de 0.5 µs.
Como el ADC tiene la función de muestrear la señal de retroalimentación, con el
dato de salida del convertidor analógico-digital se alimenta el filtro FIR y la salida del
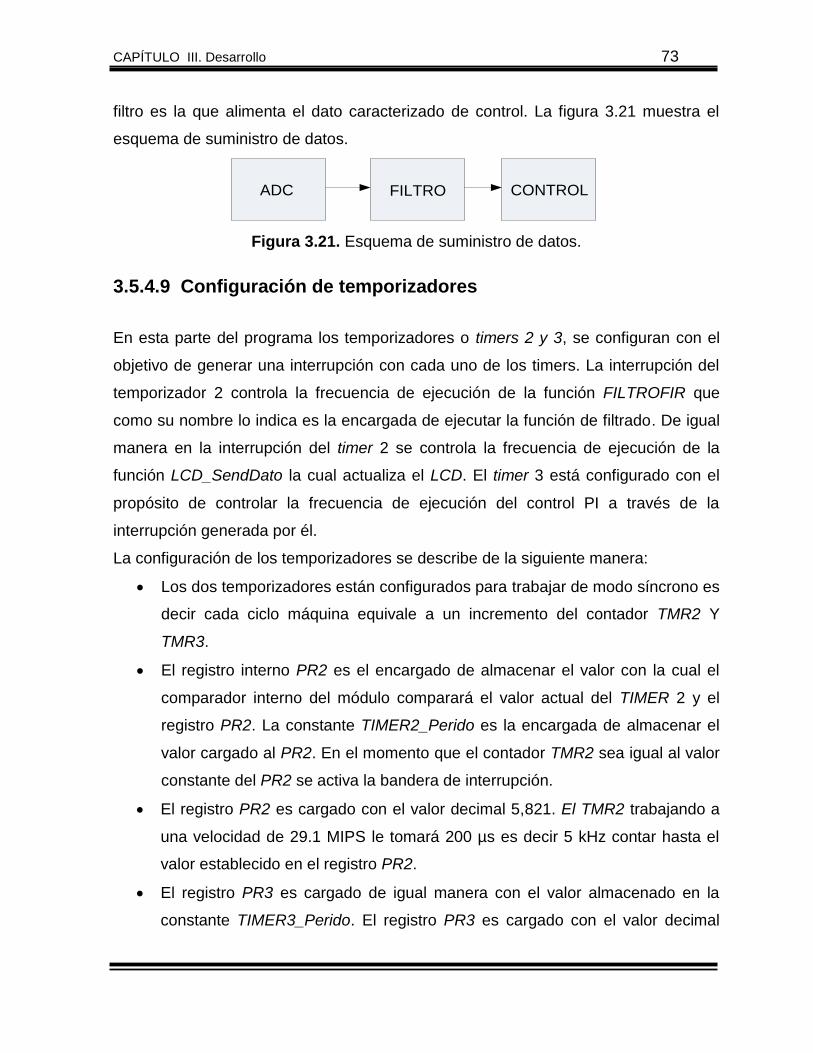
CAPÍTULO III. Desarrollo 73
filtro es la que alimenta el dato caracterizado de control. La figura 3.21 muestra el
esquema de suministro de datos.
ADC FILTRO CONTROL
Figura 3.21. Esquema de suministro de datos.
3.5.4.9 Configuración de temporizadores
En esta parte del programa los temporizadores o timers 2 y 3, se configuran con el
objetivo de generar una interrupción con cada uno de los timers. La interrupción del
temporizador 2 controla la frecuencia de ejecución de la función FILTROFIR que
como su nombre lo indica es la encargada de ejecutar la función de filtrado. De igual
manera en la interrupción del timer 2 se controla la frecuencia de ejecución de la
función LCD_SendDato la cual actualiza el LCD. El timer 3 está configurado con el
propósito de controlar la frecuencia de ejecución del control PI a través de la
interrupción generada por él.
La configuración de los temporizadores se describe de la siguiente manera:
Los dos temporizadores están configurados para trabajar de modo síncrono es
decir cada ciclo máquina equivale a un incremento del contador TMR2 Y
TMR3.
El registro interno PR2 es el encargado de almacenar el valor con la cual el
comparador interno del módulo comparará el valor actual del TIMER 2 y el
registro PR2. La constante TIMER2_Perido es la encargada de almacenar el
valor cargado al PR2. En el momento que el contador TMR2 sea igual al valor
constante del PR2 se activa la bandera de interrupción.
El registro PR2 es cargado con el valor decimal 5,821. El TMR2 trabajando a
una velocidad de 29.1 MIPS le tomará 200 µs es decir 5 kHz contar hasta el
valor establecido en el registro PR2.
El registro PR3 es cargado de igual manera con el valor almacenado en la
constante TIMER3_Perido. El registro PR3 es cargado con el valor decimal
CAPÍTULO III. Desarrollo 74
58,210 por lo tanto al contador TIMER3 le tomará 2ms es decir 500Hz coincidir
con el valor cargado al registro PR3.
3.5.4.10 Configuración de interrupciones
Este punto del programa tiene el propósito de configurar los registros de
interrupciones en el microcontrolador. La configuración de las interrupciones es a
través de la función INTERRUPT_Int.
La configuración de las interrupciones se da de la siguiente manera:
En primer lugar se configura la prioridad de las interrupciones de los
temporizadores 2 y 3. De igual manera se configura la prioridad de la
interrupción del ADC. Donde la interrupción de ADC se configura como la
interrupción con mayor jerarquía, seguido por la interrupción del temporizador
3 y por último la interrupción del temporizador 2.
Finalmente se habitaron los bits del registro de control de interrupciones IECO
el cual indica que la interrupción del timer 1 y timer 2, así como la interrupción
del módulo ADC han sido solicitadas.
3.5.4.11 Configuración del módulo PWM
La configuración del módulo PWM a través de la función PWM_Int tiene el objetivo
de activar las señales PWM que disparan a los transistores del convertidor push-pull.
Así como de activar el disparo del módulo ADC.
La configuración del módulo PWM se da de la siguiente manera:
Se utilizan los canales PWMH1 y PWML1 como salida de disparo de los
transistores del convertidor.
Se configura para un periodo de 10.75µs es decir la frecuencia del PWM es
igual a 93 kHz.
El módulo se configura para generar un disparo de encendido al ADC cada 4
ciclos de la señal PWM. Es decir cada 43 µs ó 23 kHz.
El módulo PWM se configura para operar en modo push-pull.
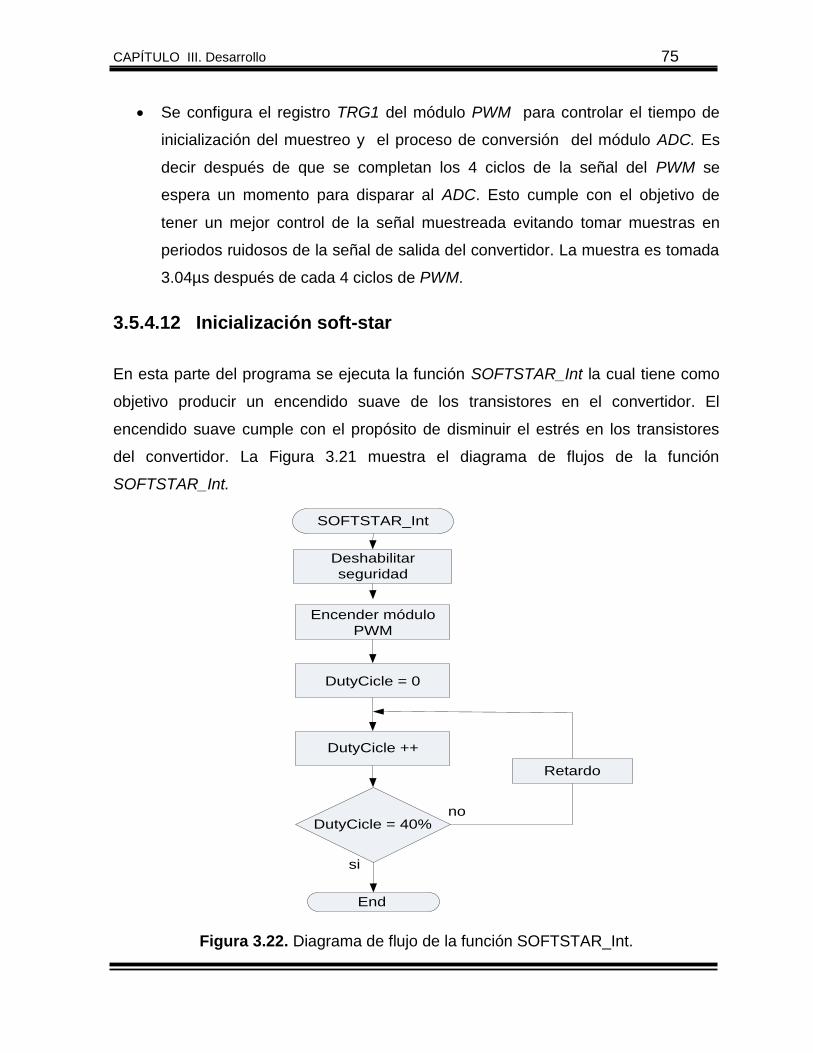
CAPÍTULO III. Desarrollo 75
Se configura el registro TRG1 del módulo PWM para controlar el tiempo de
inicialización del muestreo y el proceso de conversión del módulo ADC. Es
decir después de que se completan los 4 ciclos de la señal del PWM se
espera un momento para disparar al ADC. Esto cumple con el objetivo de
tener un mejor control de la señal muestreada evitando tomar muestras en
periodos ruidosos de la señal de salida del convertidor. La muestra es tomada
3.04µs después de cada 4 ciclos de PWM.
3.5.4.12 Inicialización soft-star
En esta parte del programa se ejecuta la función SOFTSTAR_Int la cual tiene como
objetivo producir un encendido suave de los transistores en el convertidor. El
encendido suave cumple con el propósito de disminuir el estrés en los transistores
del convertidor. La Figura 3.21 muestra el diagrama de flujos de la función
SOFTSTAR_Int.
SOFTSTAR_Int
Deshabilitar
seguridad
Encender módulo
PWM
End
DutyCicle = 0
DutyCicle ++
DutyCicle = 40%
si
no
Retardo
Figura 3.22. Diagrama de flujo de la función SOFTSTAR_Int.
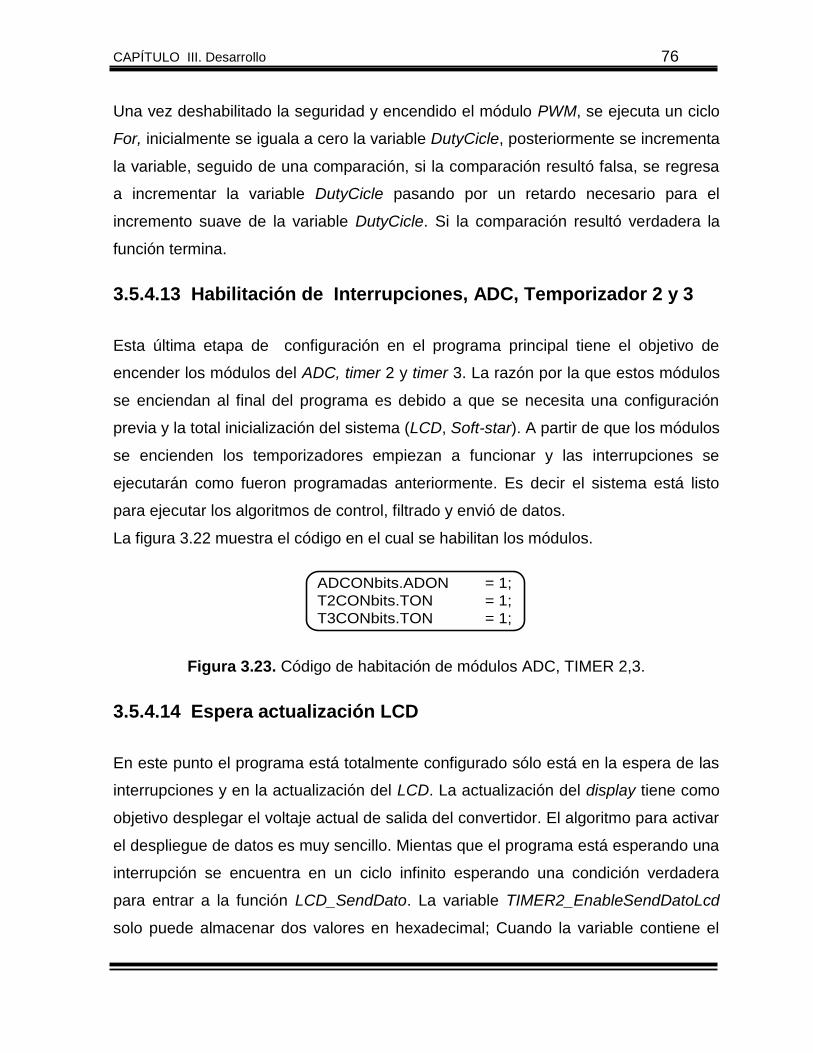
CAPÍTULO III. Desarrollo 76
Una vez deshabilitado la seguridad y encendido el módulo PWM, se ejecuta un ciclo
For, inicialmente se iguala a cero la variable DutyCicle, posteriormente se incrementa
la variable, seguido de una comparación, si la comparación resultó falsa, se regresa
a incrementar la variable DutyCicle pasando por un retardo necesario para el
incremento suave de la variable DutyCicle. Si la comparación resultó verdadera la
función termina.
3.5.4.13 Habilitación de Interrupciones, ADC, Temporizador 2 y 3
Esta última etapa de configuración en el programa principal tiene el objetivo de
encender los módulos del ADC, timer 2 y timer 3. La razón por la que estos módulos
se enciendan al final del programa es debido a que se necesita una configuración
previa y la total inicialización del sistema (LCD, Soft-star). A partir de que los módulos
se encienden los temporizadores empiezan a funcionar y las interrupciones se
ejecutarán como fueron programadas anteriormente. Es decir el sistema está listo
para ejecutar los algoritmos de control, filtrado y envió de datos.
La figura 3.22 muestra el código en el cual se habilitan los módulos.
ADCONbits.ADON = 1;
T2CONbits.TON = 1;
T3CONbits.TON = 1;
Figura 3.23. Código de habitación de módulos ADC, TIMER 2,3.
3.5.4.14 Espera actualización LCD
En este punto el programa está totalmente configurado sólo está en la espera de las
interrupciones y en la actualización del LCD. La actualización del display tiene como
objetivo desplegar el voltaje actual de salida del convertidor. El algoritmo para activar
el despliegue de datos es muy sencillo. Mientas que el programa está esperando una
interrupción se encuentra en un ciclo infinito esperando una condición verdadera
para entrar a la función LCD_SendDato. La variable TIMER2_EnableSendDatoLcd
solo puede almacenar dos valores en hexadecimal; Cuando la variable contiene el
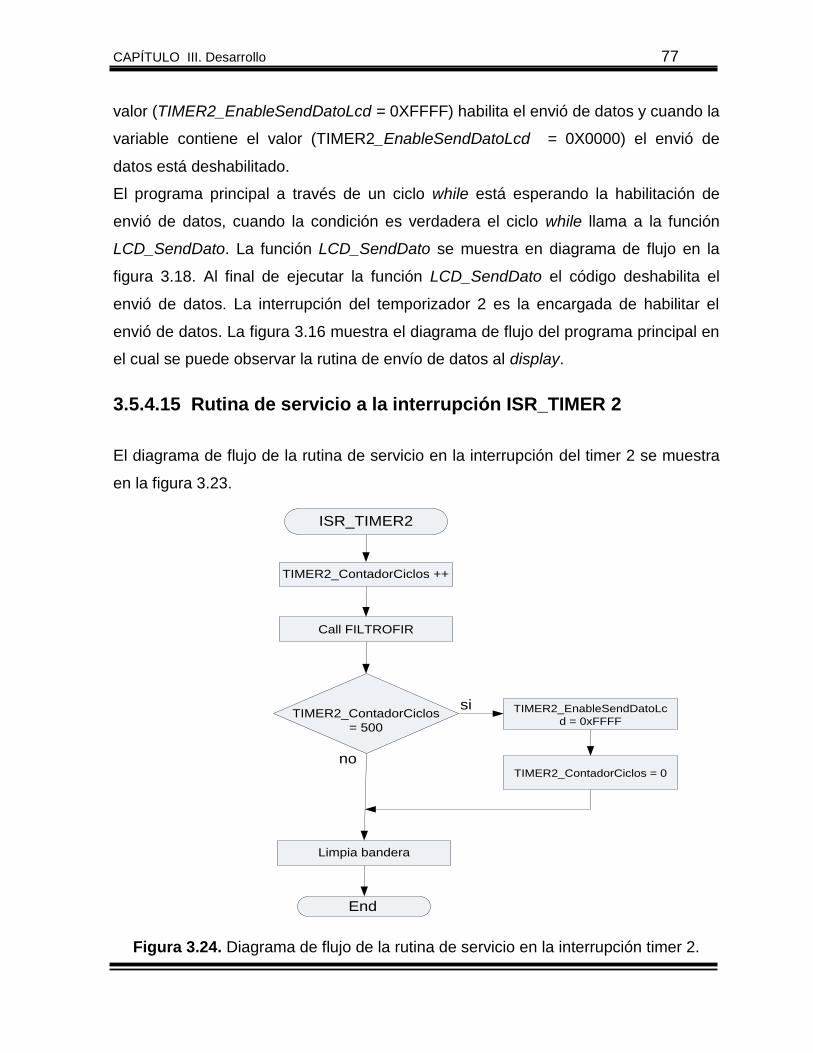
CAPÍTULO III. Desarrollo 77
valor (TIMER2_EnableSendDatoLcd = 0XFFFF) habilita el envió de datos y cuando la
variable contiene el valor (TIMER2_EnableSendDatoLcd = 0X0000) el envió de
datos está deshabilitado.
El programa principal a través de un ciclo while está esperando la habilitación de
envió de datos, cuando la condición es verdadera el ciclo while llama a la función
LCD_SendDato. La función LCD_SendDato se muestra en diagrama de flujo en la
figura 3.18. Al final de ejecutar la función LCD_SendDato el código deshabilita el
envió de datos. La interrupción del temporizador 2 es la encargada de habilitar el
envió de datos. La figura 3.16 muestra el diagrama de flujo del programa principal en
el cual se puede observar la rutina de envío de datos al display.
3.5.4.15 Rutina de servicio a la interrupción ISR_TIMER 2
El diagrama de flujo de la rutina de servicio en la interrupción del timer 2 se muestra
en la figura 3.23.
ISR_TIMER2
TIMER2_ContadorCiclos ++
Call FILTROFIR
TIMER2_ContadorCiclos
= 500
TIMER2_EnableSendDatoLc
d = 0xFFFF
TIMER2_ContadorCiclos = 0
Limpia bandera
End
no
si
Figura 3.24. Diagrama de flujo de la rutina de servicio en la interrupción timer 2.
CAPÍTULO III. Desarrollo 78
La rutina de interrupción del temporizador 2 se ejecuta con el propósito de realizar
los siguientes dos objetivos:
Llamar a la función FILTROFIR.
Habilitar la transferencia de datos al LCD a través de la variable
TIMER2_EnableSendDatoLcd.
El diagrama de flujo mostrado en la figura 3.23 se puede describir de la siguiente
manera:
Inicialmente se incrementa la variable TIMER2_ContadorCiclos con el propósito de
llevar un conteo cada vez que se ejecuta la interrupción, inmediatamente después se
llama a la función FILTROFIR el cual como su nombre lo indica realiza el filtrado de
la señal. Posteriormente existe una condición la cual compara si la variable
TIMER2_ContadorCiclos es igual a 5,000, si la condición es verdadera se habilita el
envió de datos al display, en seguida se iguala a cero la variable
TIMER2_ContadorCiclos, finalmente se borra la bandera del temporizador y termina
la rutina. Si la condición es falsa se borra la bandera del temporizador y termina la
rutina.
La variable TIMER2_ContadorCiclos se compara con el valor decimal 5,000 con el
propósito de controlar el tiempo de actualización del display. Es decir si la
interrupción se genera cada 5 kHz, y la condición es verdadera cada 5,000 conteos
esto da como resultado que la actualización del LCD se activa cada 1Hz.
3.5.4.16 Función FILTROFIR
El objetivo de esta función es ejecutar el filtrado de la señal proveniente del módulo
ADC. La figura 3.24 muestra el diagrama de flujos de la función FILTROFIR.
El diagrama de flujo de la función FILTROFIR mostrado en la figura 3.24 se puede
describir de la siguiente manera:
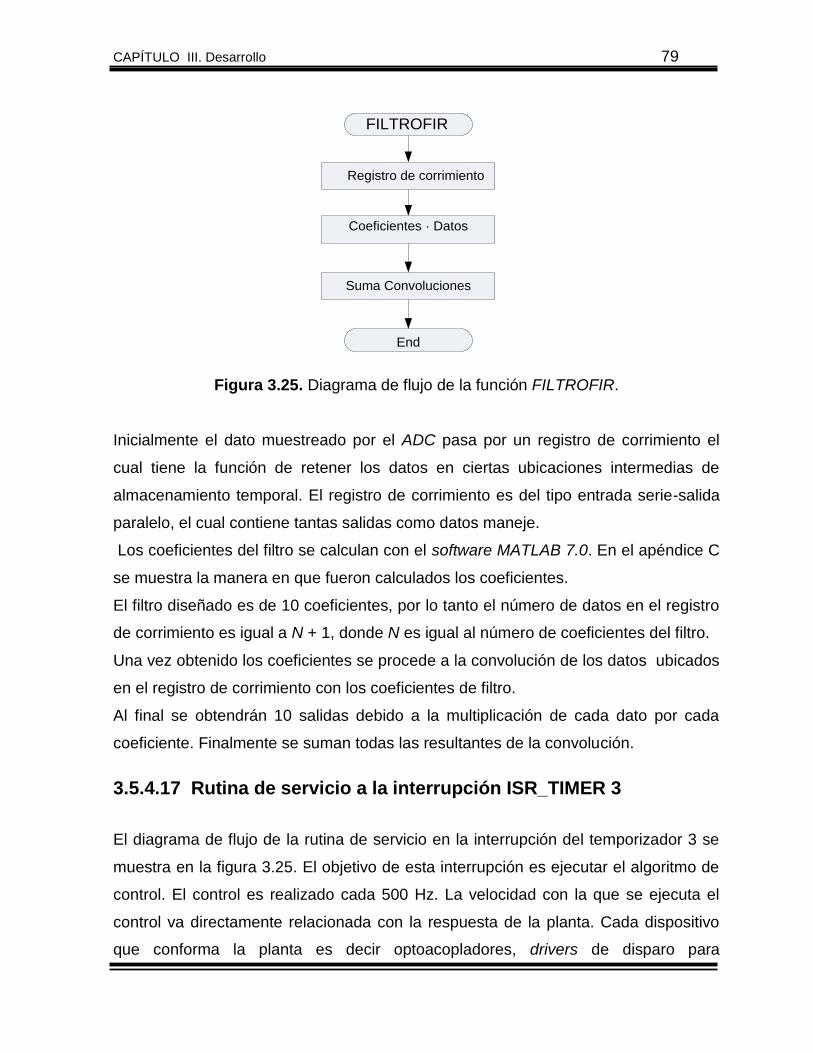
CAPÍTULO III. Desarrollo 79
FILTROFIR
Registro de corrimiento
Coeficientes · Datos
Suma Convoluciones
End
Figura 3.25. Diagrama de flujo de la función FILTROFIR.
Inicialmente el dato muestreado por el ADC pasa por un registro de corrimiento el
cual tiene la función de retener los datos en ciertas ubicaciones intermedias de
almacenamiento temporal. El registro de corrimiento es del tipo entrada serie-salida
paralelo, el cual contiene tantas salidas como datos maneje.
Los coeficientes del filtro se calculan con el software MATLAB 7.0. En el apéndice C
se muestra la manera en que fueron calculados los coeficientes.
El filtro diseñado es de 10 coeficientes, por lo tanto el número de datos en el registro
de corrimiento es igual a N + 1, donde N es igual al número de coeficientes del filtro.
Una vez obtenido los coeficientes se procede a la convolución de los datos ubicados
en el registro de corrimiento con los coeficientes de filtro.
Al final se obtendrán 10 salidas debido a la multiplicación de cada dato por cada
coeficiente. Finalmente se suman todas las resultantes de la convolución.
3.5.4.17 Rutina de servicio a la interrupción ISR_TIMER 3
El diagrama de flujo de la rutina de servicio en la interrupción del temporizador 3 se
muestra en la figura 3.25. El objetivo de esta interrupción es ejecutar el algoritmo de
control. El control es realizado cada 500 Hz. La velocidad con la que se ejecuta el
control va directamente relacionada con la respuesta de la planta. Cada dispositivo
que conforma la planta es decir optoacopladores, drivers de disparo para
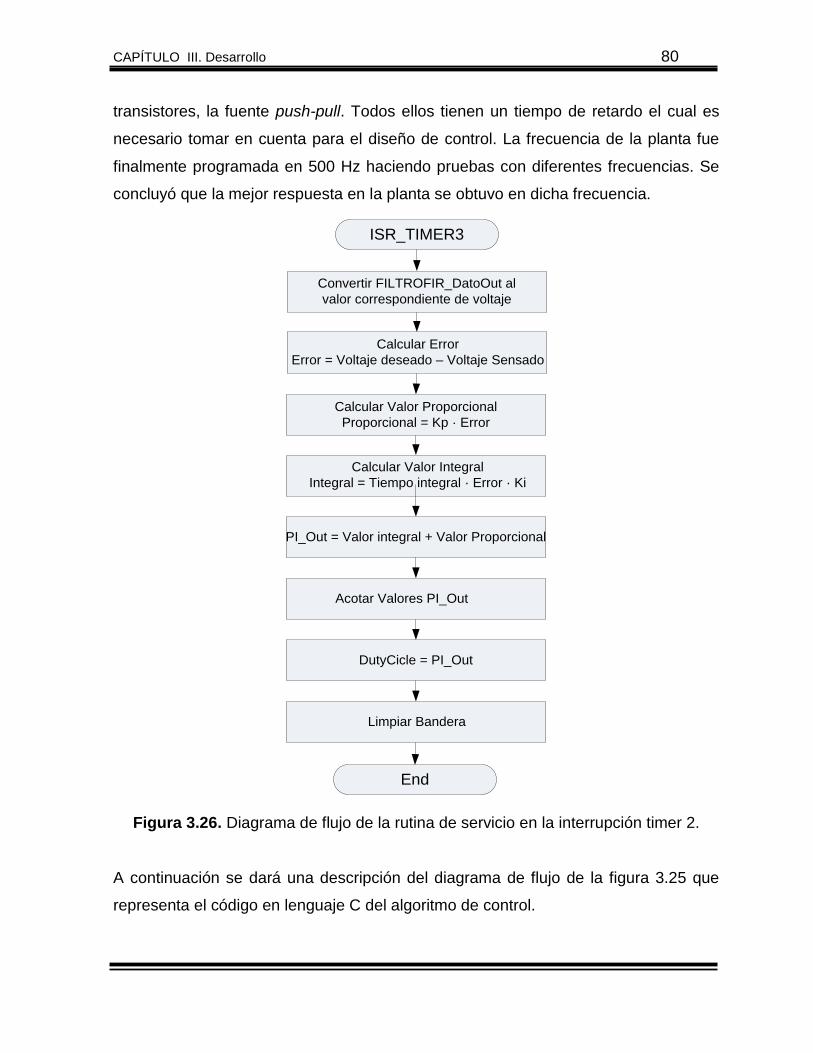
CAPÍTULO III. Desarrollo 80
transistores, la fuente push-pull. Todos ellos tienen un tiempo de retardo el cual es
necesario tomar en cuenta para el diseño de control. La frecuencia de la planta fue
finalmente programada en 500 Hz haciendo pruebas con diferentes frecuencias. Se
concluyó que la mejor respuesta en la planta se obtuvo en dicha frecuencia.
ISR_TIMER3
Convertir FILTROFIR_DatoOut al
valor correspondiente de voltaje
Calcular Error
Error = Voltaje deseado – Voltaje Sensado
Calcular Valor Proporcional
Proporcional = Kp · Error
Calcular Valor Integral
Integral = Tiempo integral · Error · Ki
PI_Out = Valor integral + Valor Proporcional
Acotar Valores PI_Out
DutyCicle = PI_Out
End
Limpiar Bandera
Figura 3.26. Diagrama de flujo de la rutina de servicio en la interrupción timer 2.
A continuación se dará una descripción del diagrama de flujo de la figura 3.25 que
representa el código en lenguaje C del algoritmo de control.
CAPÍTULO III. Desarrollo 81
La primera etapa del algoritmo de control es convertir el valor de la variable
FILTROFIR_DatoOut, que como su nombre lo indica almacena el valor de salida del
filtro FIR, a su valor correspondiente de voltaje de salida en la carga de la planta. La
variable CONTROL_VoltajeSensado almacena el valor convertido. El propósito de
convertir la variable es poder manejar el algoritmo de control en valores de voltaje. La
ecuación (3.12) representa la fórmula de conversión de la variable
FILTROFIR_DatoOut.
DatoV
Vno
2
max (3.12)
En donde:
OV = Representa el valor de voltaje de salida del convertidor.
maxV = El máximo valor de voltaje de salida del convertidor.
Dato = Representa la variable de 8 bits del filtro FIR.
n2 = El valor decimal del máximo número de bits de la variable
Dato.
El siguiente paso es calcular el error el cual se define como el voltaje deseado
menos el voltaje sensado. La figura 3.26 muestra un segmento de la rutina de control
en él se calcula el error.
CONTROL_Error = CONTROL_VoltajeDeseado - CONTROL_VoltajeSensado;
Figura 3.27. Cálculo del error en la rutina control.
El valor de la constante CONTROL_VoltajeDeseado es definida en la declaración de
constantes y variables en la sección 3.5.4.3. El nivel de voltaje deseado se estableció
a 170 V.
El siguiente paso es calcular el valor proporcional del control PI. La figura 3.27
muestra un segmento de la rutina de control en él se calcula el valor proporcional.
CAPÍTULO III. Desarrollo 82
CONTROL_ResultadoProporcional = CONTROL_GananciaProporcinal · CONTROL_Error;
Figura 3.28. Cálculo del valor proporcional en la rutina control.
El valor proporcional se obtiene con la simple multiplicación de la ganancia
proporcional PK por el error. El valor de la ganancia (
PK = 4) se define en la
declaración de constantes y variables en la sección 3.5.4.3. El valor de la ganancia
proporcional se estable basado en el método de sintonización. En la sección 3.5.4.18
se explica el método de sintonización.
Inmediatamente después de calcular el valor proporcional se procede a calcular el
valor integral el cual produce una acción de control proporcional a la integral del error
en el tiempo. La figura 3.28 muestra el segmento de código del cálculo del valor
integral.
CONTROL_AddErrorTiempoIntegral = CONTROL_TiempoMuestreoIntegral · CONTROL_Error;
CONTROL_AddErrorTiempoIntegral = CONTROL_AddErrorTiempoIntegral · CONTROL_GananciaIntegral;
CONTROL_ResultadoIntegrativo = CONTROL_AddErrorTiempoIntegral + CONTROL_ResultadoIntegrativo;
Figura 3.29. Cálculo del valor integral en la rutina de control.
La variable CONTROL_AddErrorTiempoIntegral es la encargada de almacenar la
multiplicación del error por el tiempo de muestreo el cual es necesario para obtener
la aproximación al área bajo la curva del error. El tiempo de integración está
directamente relacionado con la velocidad de ejecución de la interrupción del
temporizador 3, es decir si la frecuencia de ejecución del control es 500 Hz, la
variable error se calcula a la misma velocidad, por lo tanto el tiempo de integración
es igual al tiempo entre cada cálculo del valor integral.
La ganancia integral se programó basado en el método de sintonización de la misma
manera que la ganancia proporcional. La ganancia integral elegida en este programa
es (IK = 2).
Una vez multiplicada la ganancia integral por el tiempo proporcional y el error, se
procede a sumar el resultado anterior del cálculo integral. Es decir el control integral
CAPÍTULO III. Desarrollo 83
suma todos errores pasados con el propósito de que una señal de error constante
produzca una señal de error creciente.
Una vez calculada la parte integral se procede a sumar el valor proporcional más el
valor integral. La figura 3.29 muestra el fragmento de código del cálculo de la suma
de valores proporciona e integral.
CONTROL_ProporcionalIntegralOut = CONTROL_ResultadoProporcional + CONTROL_ResultadoIntegrativo;
Figura 3.30. Cálculo de la suma del valor proporcional e integral.
Una vez sumado los resultados y almacenados en la variable
CONTROL_ProporcionalIntegralOut se procede a acotar la señal de salida del
controlador antes de ser cargada al registro PDC1 el cual controla el ciclo útil del
módulo PWM.
El acotar la señal de salida de controlador tiene el objetivo de establecer los límites
del ciclo útil del módulo PWM. El valor decimal cargado al registro PDC1 va entre
(20 - 3000) es decir entre (0 - 45%) del ciclo útil de la señal.
Una vez acotado los valores de salida del control se procede a realizar el último paso
del algoritmo de control, se cargar el valor de salida del controlador
(CONTROL_ProporcionalIntegralOut) al registro PDC1. Una vez cargado se limpia
bandera de interrupción y finaliza.
3.5.4.18 Método de sintonización PI
El propósito de este método es establecer las ganancias proporcional e integral del
controlador para obtener una respuesta óptima de la planta.
El desarrollo de este método se basó en pruebas experimentales, es decir, se analizo
la planta con diferentes valor de ganancia, una vez analizada se comparan las
respuestas de la planta (máximo sobreimpulso, tiempo de estabilización) eligiendo la
ganancia con mejor respuesta.
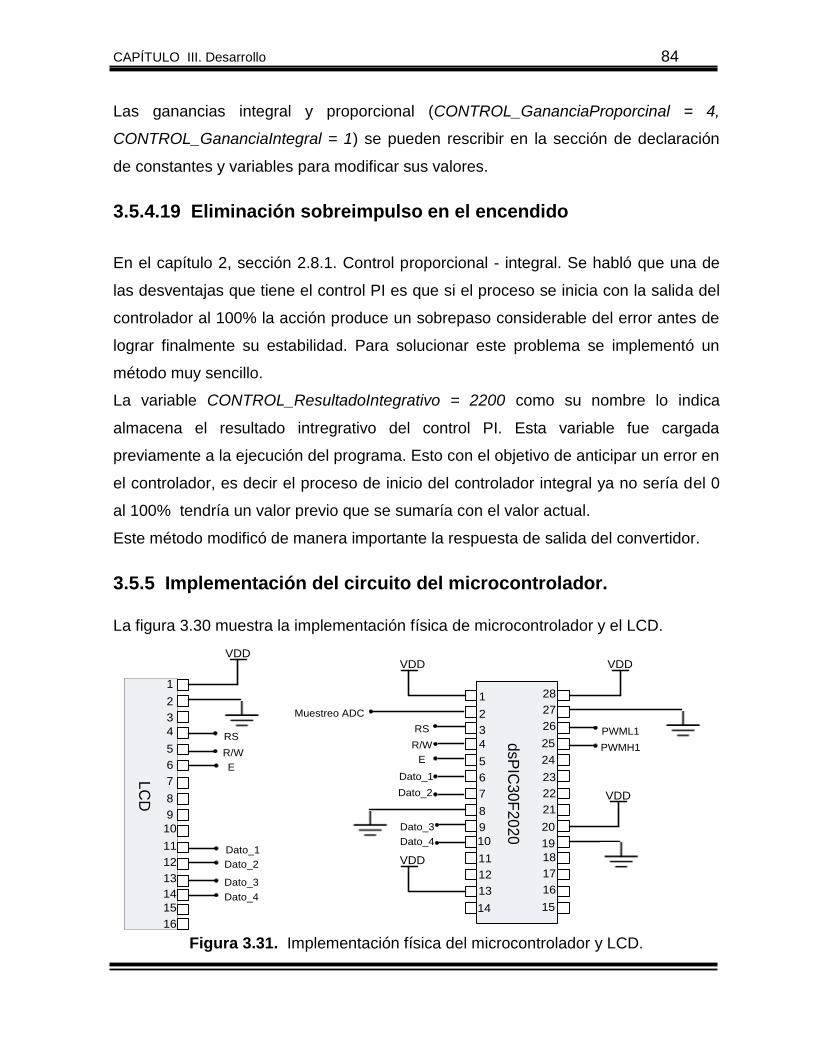
CAPÍTULO III. Desarrollo 84
Las ganancias integral y proporcional (CONTROL_GananciaProporcinal = 4,
CONTROL_GananciaIntegral = 1) se pueden rescribir en la sección de declaración
de constantes y variables para modificar sus valores.
3.5.4.19 Eliminación sobreimpulso en el encendido
En el capítulo 2, sección 2.8.1. Control proporcional - integral. Se habló que una de
las desventajas que tiene el control PI es que si el proceso se inicia con la salida del
controlador al 100% la acción produce un sobrepaso considerable del error antes de
lograr finalmente su estabilidad. Para solucionar este problema se implementó un
método muy sencillo.
La variable CONTROL_ResultadoIntegrativo = 2200 como su nombre lo indica
almacena el resultado intregrativo del control PI. Esta variable fue cargada
previamente a la ejecución del programa. Esto con el objetivo de anticipar un error en
el controlador, es decir el proceso de inicio del controlador integral ya no sería del 0
al 100% tendría un valor previo que se sumaría con el valor actual.
Este método modificó de manera importante la respuesta de salida del convertidor.
3.5.5 Implementación del circuito del microcontrolador.
La figura 3.30 muestra la implementación física de microcontrolador y el LCD.
dsP
IC3
0F
20
20
VDDL
CD
VDD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
19
18
17
16
15
24
23
22
21
20
28
27
26
25
VDD
VDD
PWML1
PWMH1
Muestreo ADC
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
VDD
RS
R/W
E
Dato_1
Dato_4
Dato_3
Dato_2
RS
R/W
E
Dato_1
Dato_2
Dato_4
Dato_3
Figura 3.31. Implementación física del microcontrolador y LCD.
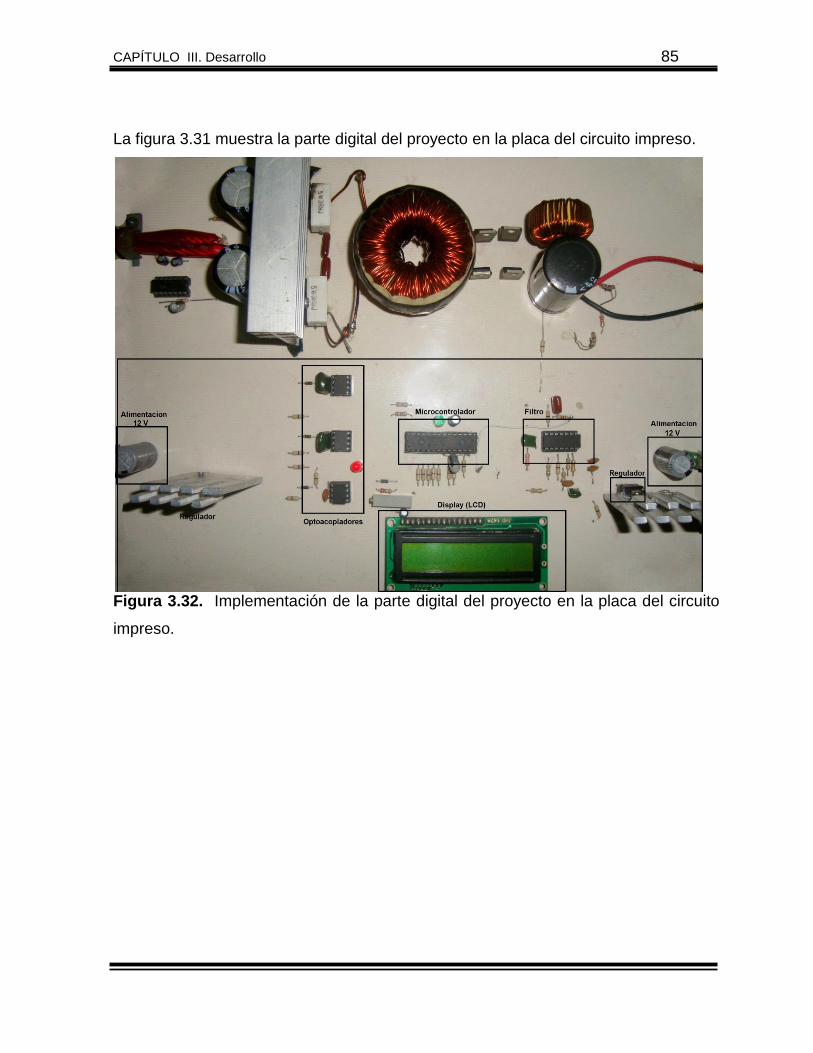
CAPÍTULO III. Desarrollo 85
La figura 3.31 muestra la parte digital del proyecto en la placa del circuito impreso.
Figura 3.32. Implementación de la parte digital del proyecto en la placa del circuito
impreso.
CAPÍTULO III. Desarrollo 86
Referencias
[1] Micrometals Inc, “Iron Powder Cores”, 2008 (Página Web),
http://www.micrometals.com/ Consultada en Noviembre 2008.
[2] Micrometals Inc, “Iron Powder Cores”, 2008 (Página Web),
http://www.micrometals.com/materials_index.html, Consultada en diciembre
2008.
[3] MICROCHIP Technology Inc, “dsPIC30F2020 Rev.A1 Silicon Errata”, 2007,
(Página Web), http://ww1.microchip.com/downloads/en/DeviceDoc/80290J.pdf
consultada en abril 2009.
[4] Liquid Crystal Display LCD, “How to use intelligent LCD”, 1997 (Página Web),
http://lcd-linux.sourceforge.net/pdfdocs/lcd1.pdf. Consultada en febrero 2008.
CAPÍTULO IV
Pruebas y resultados
En este capítulo se presentan las pruebas realizadas al controlador y convertidor
push-pull. Las pruebas se pueden dividir en 2 partes: pruebas en lazo abierto y
pruebas en lazo cerrado. En las pruebas en lazo abierto se analiza el
comportamiento de la fuente push-pull en cada una de sus etapas de conversión, se
hace una comparación de las formas de onda del voltaje drenaje - fuente (dsV ) de
cada transistor con circuitos de protección y sin circuitos de protección. En las
pruebas de lazo cerrado se analiza el funcionamiento del lazo de control observando
la respuesta cuando el control inicia y cuando existen variaciones de carga.
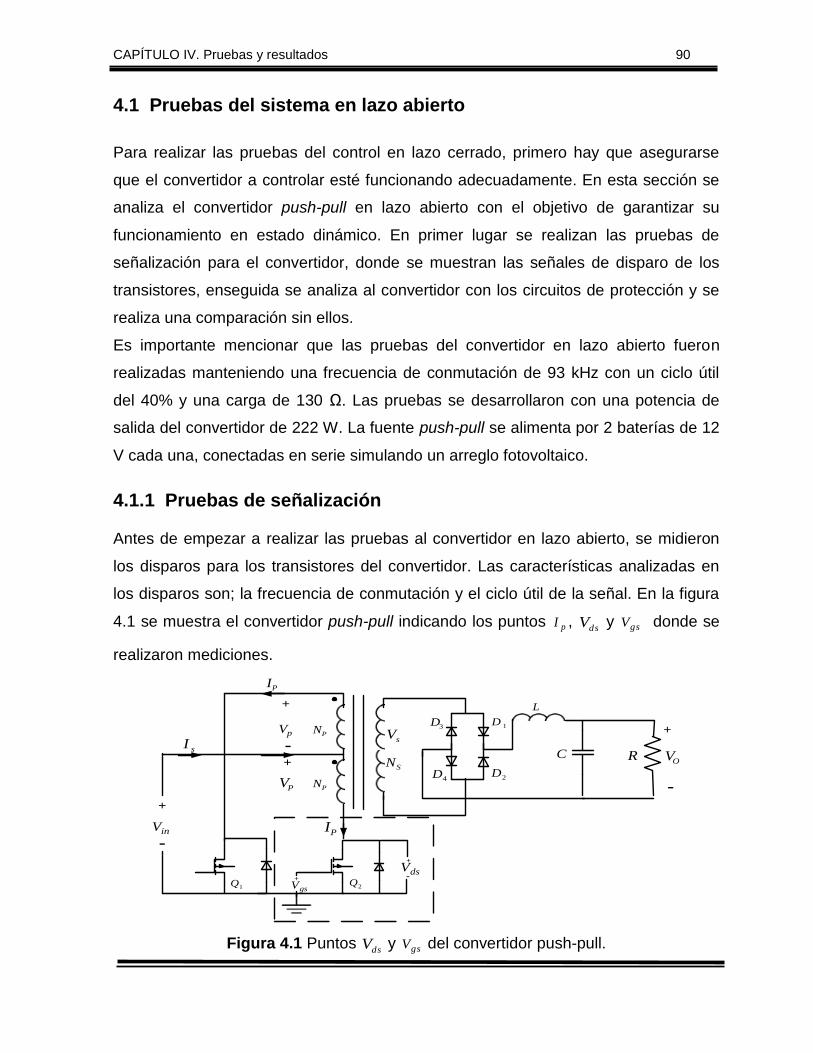
CAPÍTULO IV. Pruebas y resultados 90
4.1 Pruebas del sistema en lazo abierto
Para realizar las pruebas del control en lazo cerrado, primero hay que asegurarse
que el convertidor a controlar esté funcionando adecuadamente. En esta sección se
analiza el convertidor push-pull en lazo abierto con el objetivo de garantizar su
funcionamiento en estado dinámico. En primer lugar se realizan las pruebas de
señalización para el convertidor, donde se muestran las señales de disparo de los
transistores, enseguida se analiza al convertidor con los circuitos de protección y se
realiza una comparación sin ellos.
Es importante mencionar que las pruebas del convertidor en lazo abierto fueron
realizadas manteniendo una frecuencia de conmutación de 93 kHz con un ciclo útil
del 40% y una carga de 130 Ω. Las pruebas se desarrollaron con una potencia de
salida del convertidor de 222 W. La fuente push-pull se alimenta por 2 baterías de 12
V cada una, conectadas en serie simulando un arreglo fotovoltaico.
4.1.1 Pruebas de señalización Antes de empezar a realizar las pruebas al convertidor en lazo abierto, se midieron
los disparos para los transistores del convertidor. Las características analizadas en
los disparos son; la frecuencia de conmutación y el ciclo útil de la señal. En la figura
4.1 se muestra el convertidor push-pull indicando los puntos pI , dsV y gsV donde se
realizaron mediciones.
OV
+
-
R
inV
+
-
+
-sV
+
PN
PN
SN
1Q 2Q
PI
L
C
2D
1D3D
4D
PI
pV
PV
sI
dsV+
-
gsV+
Figura 4.1 Puntos dsV y gsV del convertidor push-pull.
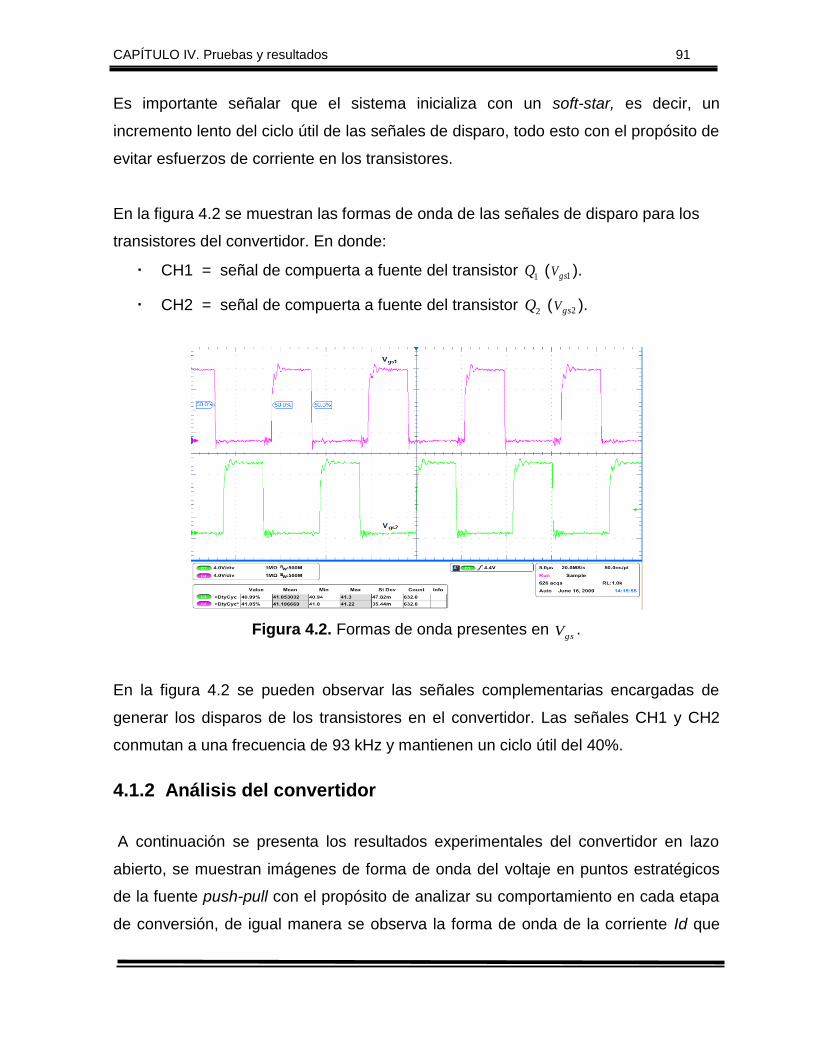
CAPÍTULO IV. Pruebas y resultados 91
Es importante señalar que el sistema inicializa con un soft-star, es decir, un
incremento lento del ciclo útil de las señales de disparo, todo esto con el propósito de
evitar esfuerzos de corriente en los transistores.
En la figura 4.2 se muestran las formas de onda de las señales de disparo para los
transistores del convertidor. En donde:
CH1 = señal de compuerta a fuente del transistor 1Q ( 1gsV ).
CH2 = señal de compuerta a fuente del transistor 2Q ( 2gsV ).
Figura 4.2. Formas de onda presentes en gsV .
En la figura 4.2 se pueden observar las señales complementarias encargadas de
generar los disparos de los transistores en el convertidor. Las señales CH1 y CH2
conmutan a una frecuencia de 93 kHz y mantienen un ciclo útil del 40%.
4.1.2 Análisis del convertidor
A continuación se presenta los resultados experimentales del convertidor en lazo
abierto, se muestran imágenes de forma de onda del voltaje en puntos estratégicos
de la fuente push-pull con el propósito de analizar su comportamiento en cada etapa
de conversión, de igual manera se observa la forma de onda de la corriente Id que
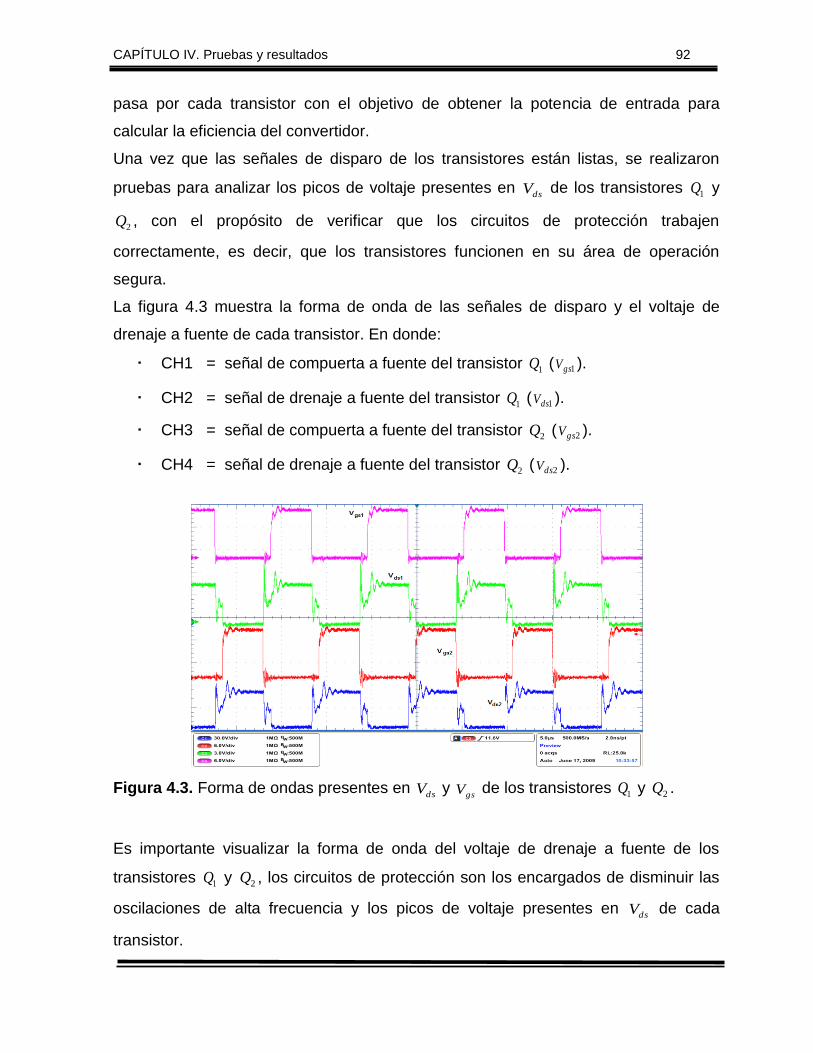
CAPÍTULO IV. Pruebas y resultados 92
pasa por cada transistor con el objetivo de obtener la potencia de entrada para
calcular la eficiencia del convertidor.
Una vez que las señales de disparo de los transistores están listas, se realizaron
pruebas para analizar los picos de voltaje presentes en dsV de los transistores 1Q y
2Q , con el propósito de verificar que los circuitos de protección trabajen
correctamente, es decir, que los transistores funcionen en su área de operación
segura.
La figura 4.3 muestra la forma de onda de las señales de disparo y el voltaje de
drenaje a fuente de cada transistor. En donde:
CH1 = señal de compuerta a fuente del transistor 1Q ( 1gsV ).
CH2 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH3 = señal de compuerta a fuente del transistor 2Q ( 2gsV ).
CH4 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Figura 4.3. Forma de ondas presentes en dsV y
gsV de los transistores 1Q y 2Q .
Es importante visualizar la forma de onda del voltaje de drenaje a fuente de los
transistores 1Q y 2Q , los circuitos de protección son los encargados de disminuir las
oscilaciones de alta frecuencia y los picos de voltaje presentes en dsV de cada
transistor.
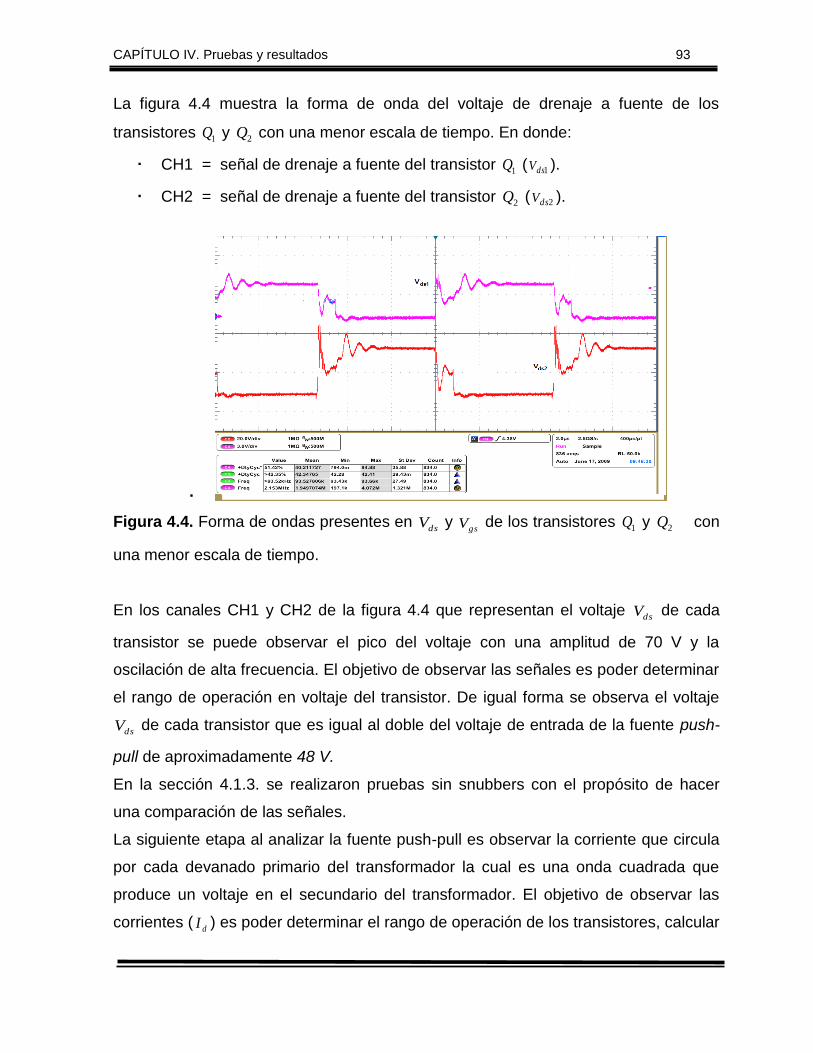
CAPÍTULO IV. Pruebas y resultados 93
La figura 4.4 muestra la forma de onda del voltaje de drenaje a fuente de los
transistores 1Q y 2Q con una menor escala de tiempo. En donde:
CH1 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH2 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Figura 4.4. Forma de ondas presentes en dsV y
gsV de los transistores 1Q y 2Q con
una menor escala de tiempo.
En los canales CH1 y CH2 de la figura 4.4 que representan el voltaje dsV de cada
transistor se puede observar el pico del voltaje con una amplitud de 70 V y la
oscilación de alta frecuencia. El objetivo de observar las señales es poder determinar
el rango de operación en voltaje del transistor. De igual forma se observa el voltaje
dsV de cada transistor que es igual al doble del voltaje de entrada de la fuente push-
pull de aproximadamente 48 V.
En la sección 4.1.3. se realizaron pruebas sin snubbers con el propósito de hacer
una comparación de las señales.
La siguiente etapa al analizar la fuente push-pull es observar la corriente que circula
por cada devanado primario del transformador la cual es una onda cuadrada que
produce un voltaje en el secundario del transformador. El objetivo de observar las
corrientes (dI ) es poder determinar el rango de operación de los transistores, calcular
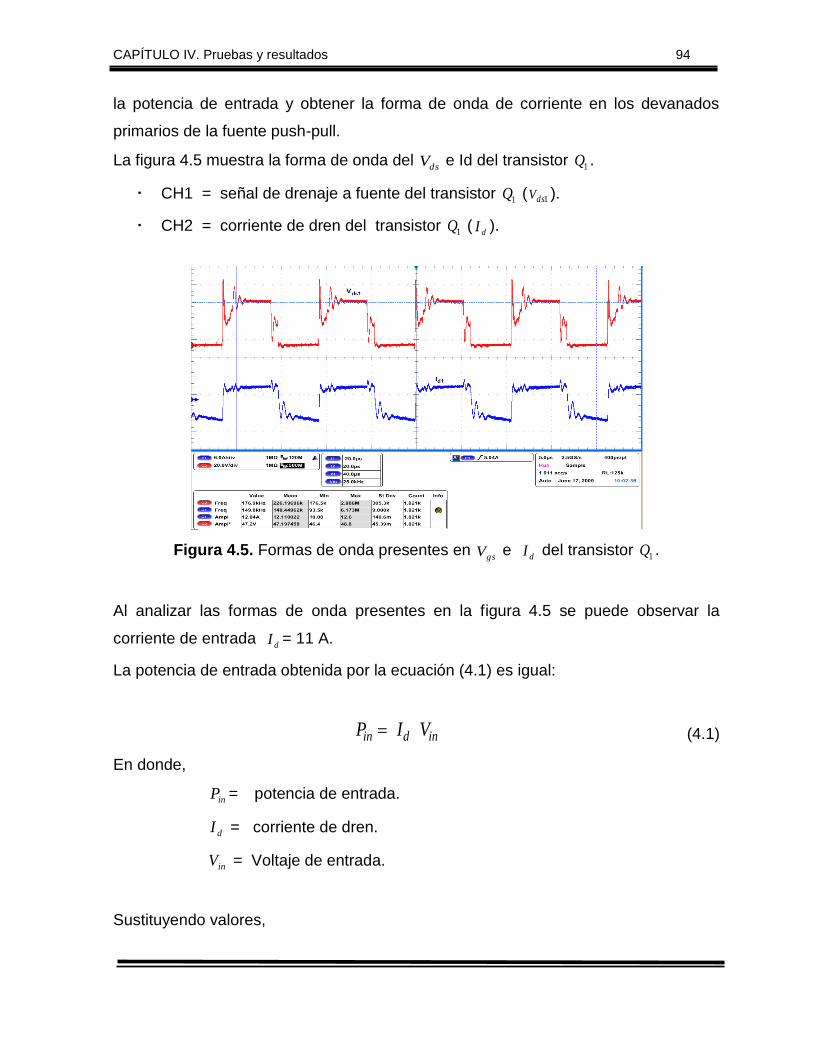
CAPÍTULO IV. Pruebas y resultados 94
la potencia de entrada y obtener la forma de onda de corriente en los devanados
primarios de la fuente push-pull.
La figura 4.5 muestra la forma de onda del dsV e Id del transistor 1Q .
CH1 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH2 = corriente de dren del transistor 1Q (dI ).
Figura 4.5. Formas de onda presentes en gsV e
dI del transistor 1Q .
Al analizar las formas de onda presentes en la figura 4.5 se puede observar la
corriente de entrada dI = 11 A.
La potencia de entrada obtenida por la ecuación (4.1) es igual:
indin VIP (4.1)
En donde,
inP = potencia de entrada.
dI = corriente de dren.
inV = Voltaje de entrada.
Sustituyendo valores,

CAPÍTULO IV. Pruebas y resultados 95
WattsPin 2585.2311 (4.2)
Por lo tanto la eficiencia de la fuente se puede obtener por medio de la ecuación
(4.3).
100
EntradaPotencia
SalidaPotenciaEficiencia (4.3)
Sustituyendo valores,
%09.86100258
222
Watts
WattsEficiencia (4.4)
La eficiencia del 86.09% de la fuente es considerada una eficiencia aceptable según
las características del convertidor.
La corriente promedio ( aI ) y la corriente pico (pI ) en los transistores 1Q y 2Q está
dada por la ecuación (4.5) y (4.6) respectivamente.
AmperesI
I da 5.5
2 (4.5)
AmperesII dP 11 (4.6)
Las corrientes pI de la ecuación (4.6) del los transistores 1Q y 2Q , así como el voltaje
pico de 70 V presentes en el dsV de cada transistor se encuentran dentro del área del
operación segura. En el anexo 2 se muestra la hoja de especificaciones del transistor
IRFP150N.
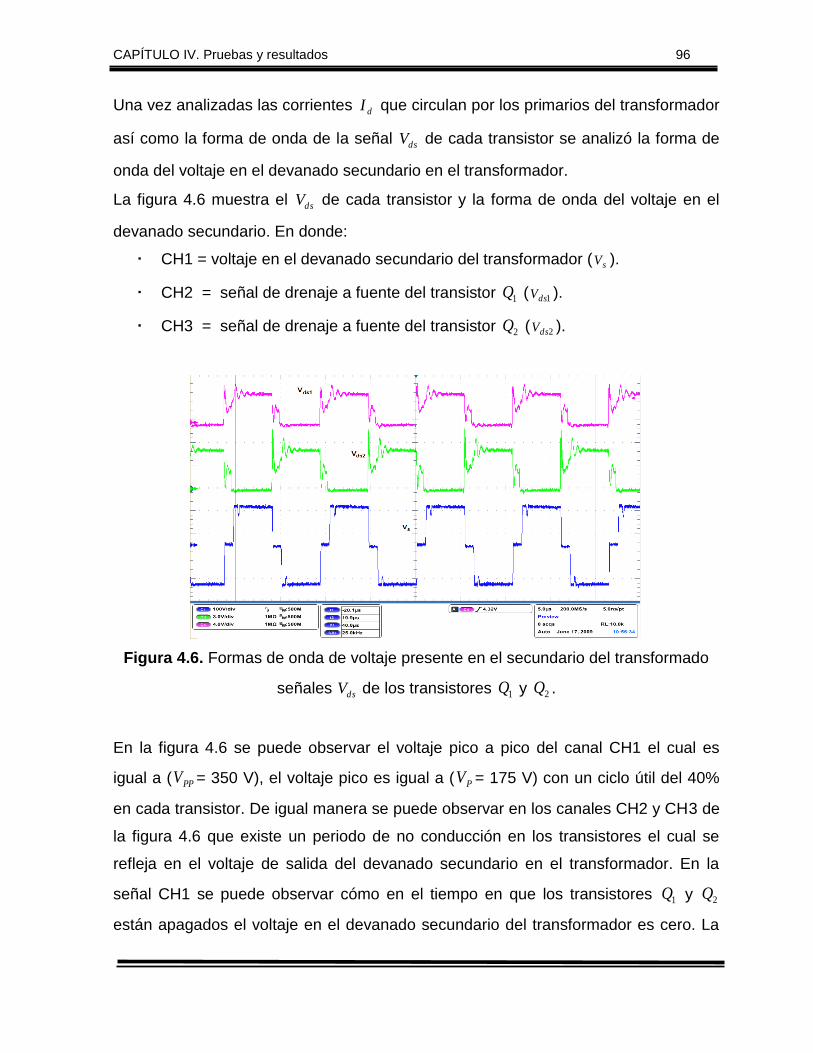
CAPÍTULO IV. Pruebas y resultados 96
Una vez analizadas las corrientes dI que circulan por los primarios del transformador
así como la forma de onda de la señal dsV de cada transistor se analizó la forma de
onda del voltaje en el devanado secundario en el transformador.
La figura 4.6 muestra el dsV de cada transistor y la forma de onda del voltaje en el
devanado secundario. En donde:
CH1 = voltaje en el devanado secundario del transformador ( sV ).
CH2 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH3 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Figura 4.6. Formas de onda de voltaje presente en el secundario del transformado
señales dsV de los transistores 1Q y 2Q .
En la figura 4.6 se puede observar el voltaje pico a pico del canal CH1 el cual es
igual a ( PPV = 350 V), el voltaje pico es igual a ( PV = 175 V) con un ciclo útil del 40%
en cada transistor. De igual manera se puede observar en los canales CH2 y CH3 de
la figura 4.6 que existe un periodo de no conducción en los transistores el cual se
refleja en el voltaje de salida del devanado secundario en el transformador. En la
señal CH1 se puede observar cómo en el tiempo en que los transistores 1Q y 2Q
están apagados el voltaje en el devanado secundario del transformador es cero. La
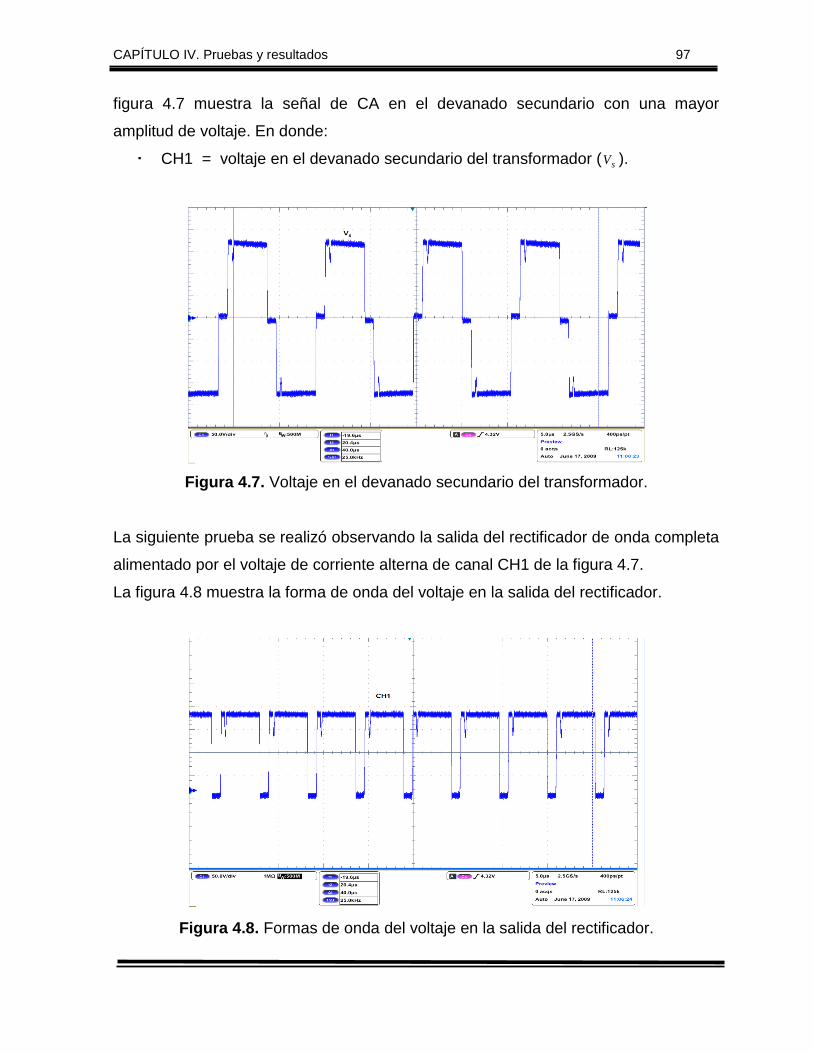
CAPÍTULO IV. Pruebas y resultados 97
figura 4.7 muestra la señal de CA en el devanado secundario con una mayor
amplitud de voltaje. En donde:
CH1 = voltaje en el devanado secundario del transformador ( sV ).
Figura 4.7. Voltaje en el devanado secundario del transformador.
La siguiente prueba se realizó observando la salida del rectificador de onda completa
alimentado por el voltaje de corriente alterna de canal CH1 de la figura 4.7.
La figura 4.8 muestra la forma de onda del voltaje en la salida del rectificador.
Figura 4.8. Formas de onda del voltaje en la salida del rectificador.
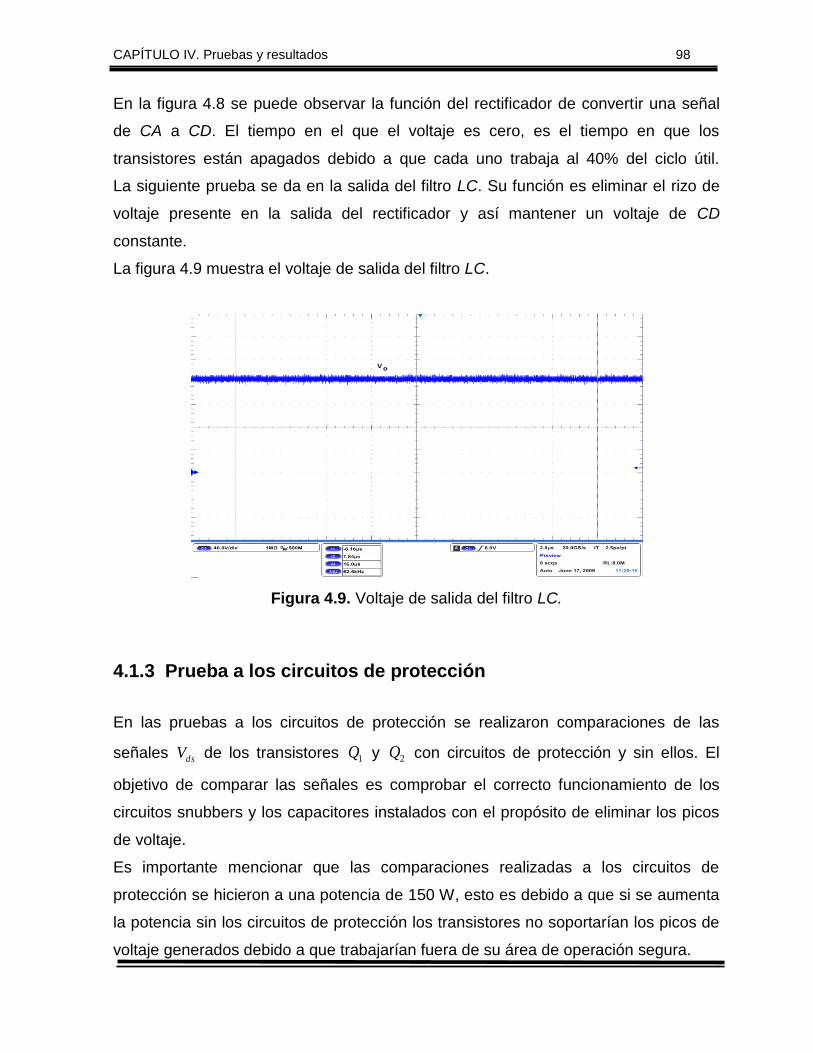
CAPÍTULO IV. Pruebas y resultados 98
En la figura 4.8 se puede observar la función del rectificador de convertir una señal
de CA a CD. El tiempo en el que el voltaje es cero, es el tiempo en que los
transistores están apagados debido a que cada uno trabaja al 40% del ciclo útil.
La siguiente prueba se da en la salida del filtro LC. Su función es eliminar el rizo de
voltaje presente en la salida del rectificador y así mantener un voltaje de CD
constante.
La figura 4.9 muestra el voltaje de salida del filtro LC.
Figura 4.9. Voltaje de salida del filtro LC.
4.1.3 Prueba a los circuitos de protección
En las pruebas a los circuitos de protección se realizaron comparaciones de las
señales dsV de los transistores 1Q y 2Q con circuitos de protección y sin ellos. El
objetivo de comparar las señales es comprobar el correcto funcionamiento de los
circuitos snubbers y los capacitores instalados con el propósito de eliminar los picos
de voltaje.
Es importante mencionar que las comparaciones realizadas a los circuitos de
protección se hicieron a una potencia de 150 W, esto es debido a que si se aumenta
la potencia sin los circuitos de protección los transistores no soportarían los picos de
voltaje generados debido a que trabajarían fuera de su área de operación segura.
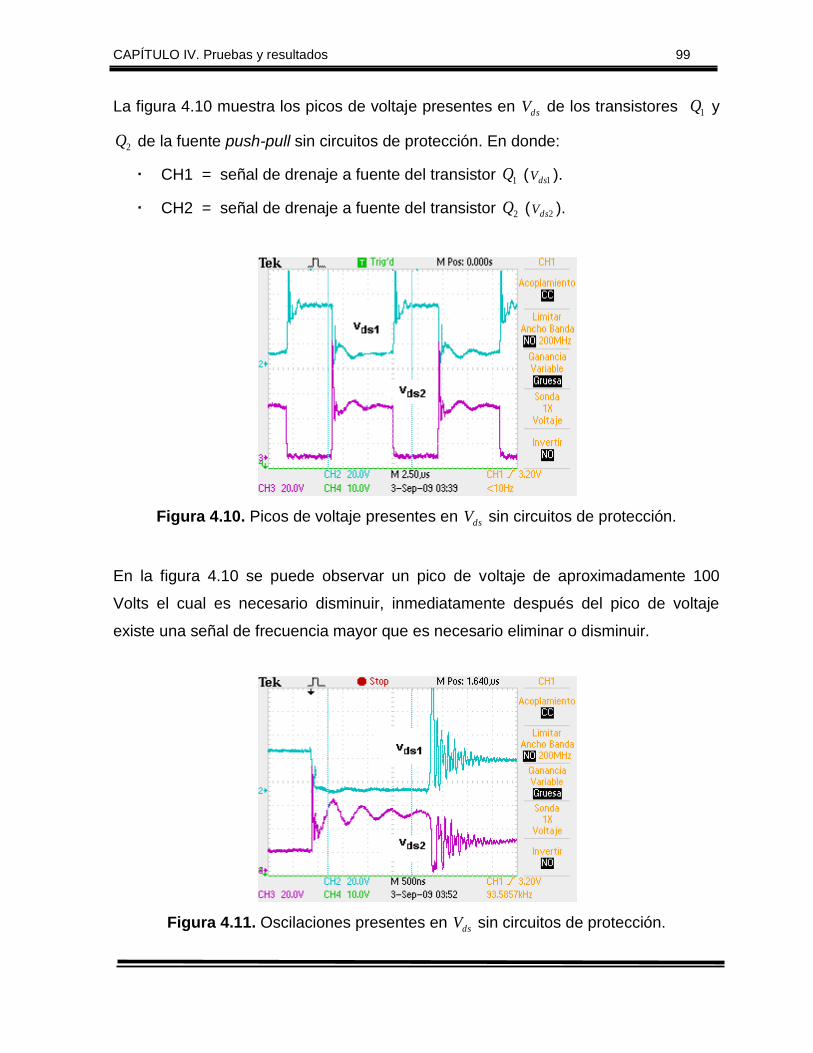
CAPÍTULO IV. Pruebas y resultados 99
La figura 4.10 muestra los picos de voltaje presentes en dsV de los transistores 1Q y
2Q de la fuente push-pull sin circuitos de protección. En donde:
CH1 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH2 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Figura 4.10. Picos de voltaje presentes en dsV sin circuitos de protección.
En la figura 4.10 se puede observar un pico de voltaje de aproximadamente 100
Volts el cual es necesario disminuir, inmediatamente después del pico de voltaje
existe una señal de frecuencia mayor que es necesario eliminar o disminuir.
Figura 4.11. Oscilaciones presentes en dsV sin circuitos de protección.
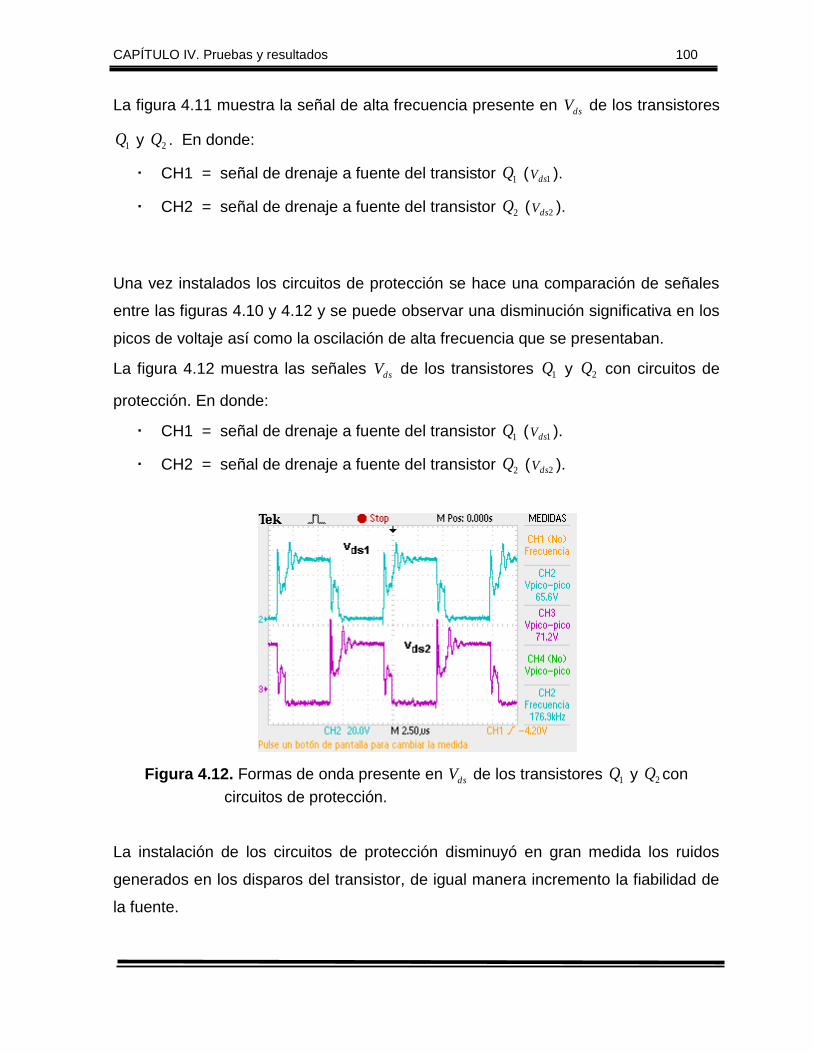
CAPÍTULO IV. Pruebas y resultados 100
La figura 4.11 muestra la señal de alta frecuencia presente en dsV de los transistores
1Q y 2Q . En donde:
CH1 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH2 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Una vez instalados los circuitos de protección se hace una comparación de señales
entre las figuras 4.10 y 4.12 y se puede observar una disminución significativa en los
picos de voltaje así como la oscilación de alta frecuencia que se presentaban.
La figura 4.12 muestra las señales dsV de los transistores 1Q y 2Q con circuitos de
protección. En donde:
CH1 = señal de drenaje a fuente del transistor 1Q ( 1dsV ).
CH2 = señal de drenaje a fuente del transistor 2Q ( 2dsV ).
Figura 4.12. Formas de onda presente en dsV de los transistores 1Q y 2Q con
circuitos de protección.
La instalación de los circuitos de protección disminuyó en gran medida los ruidos
generados en los disparos del transistor, de igual manera incremento la fiabilidad de
la fuente.
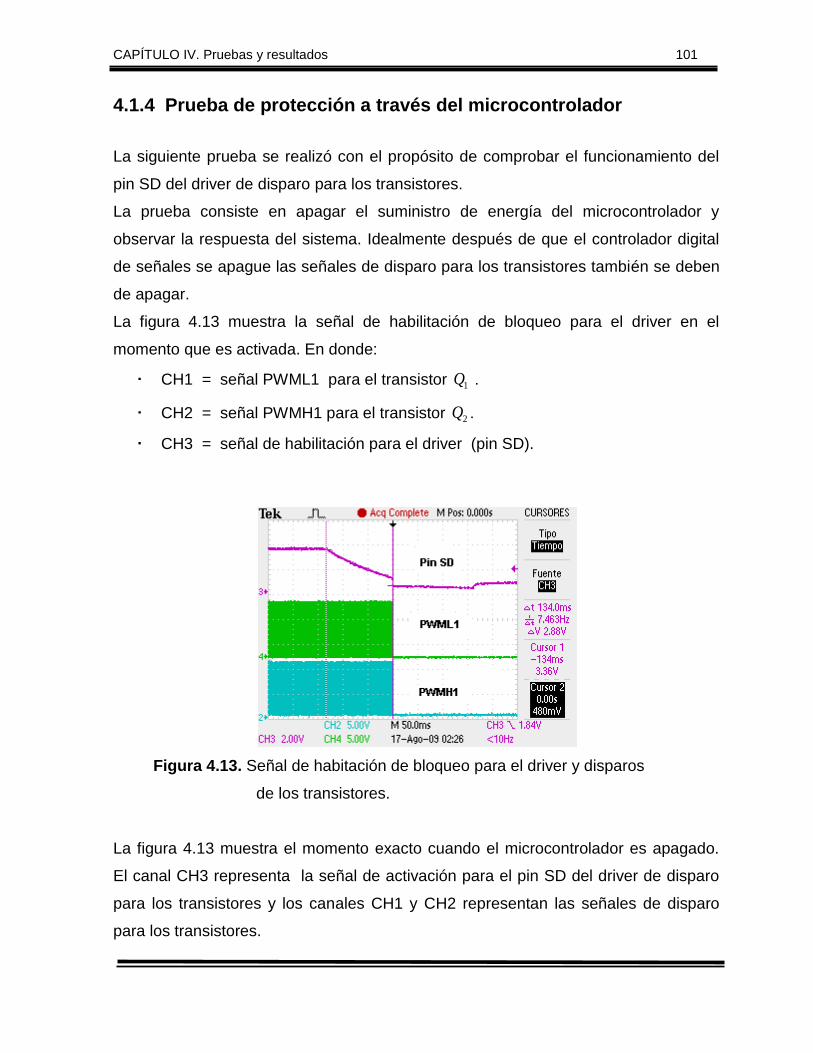
CAPÍTULO IV. Pruebas y resultados 101
4.1.4 Prueba de protección a través del microcontrolador
La siguiente prueba se realizó con el propósito de comprobar el funcionamiento del
pin SD del driver de disparo para los transistores.
La prueba consiste en apagar el suministro de energía del microcontrolador y
observar la respuesta del sistema. Idealmente después de que el controlador digital
de señales se apague las señales de disparo para los transistores también se deben
de apagar.
La figura 4.13 muestra la señal de habilitación de bloqueo para el driver en el
momento que es activada. En donde:
CH1 = señal PWML1 para el transistor 1Q .
CH2 = señal PWMH1 para el transistor 2Q .
CH3 = señal de habilitación para el driver (pin SD).
Figura 4.13. Señal de habitación de bloqueo para el driver y disparos
de los transistores.
La figura 4.13 muestra el momento exacto cuando el microcontrolador es apagado.
El canal CH3 representa la señal de activación para el pin SD del driver de disparo
para los transistores y los canales CH1 y CH2 representan las señales de disparo
para los transistores.
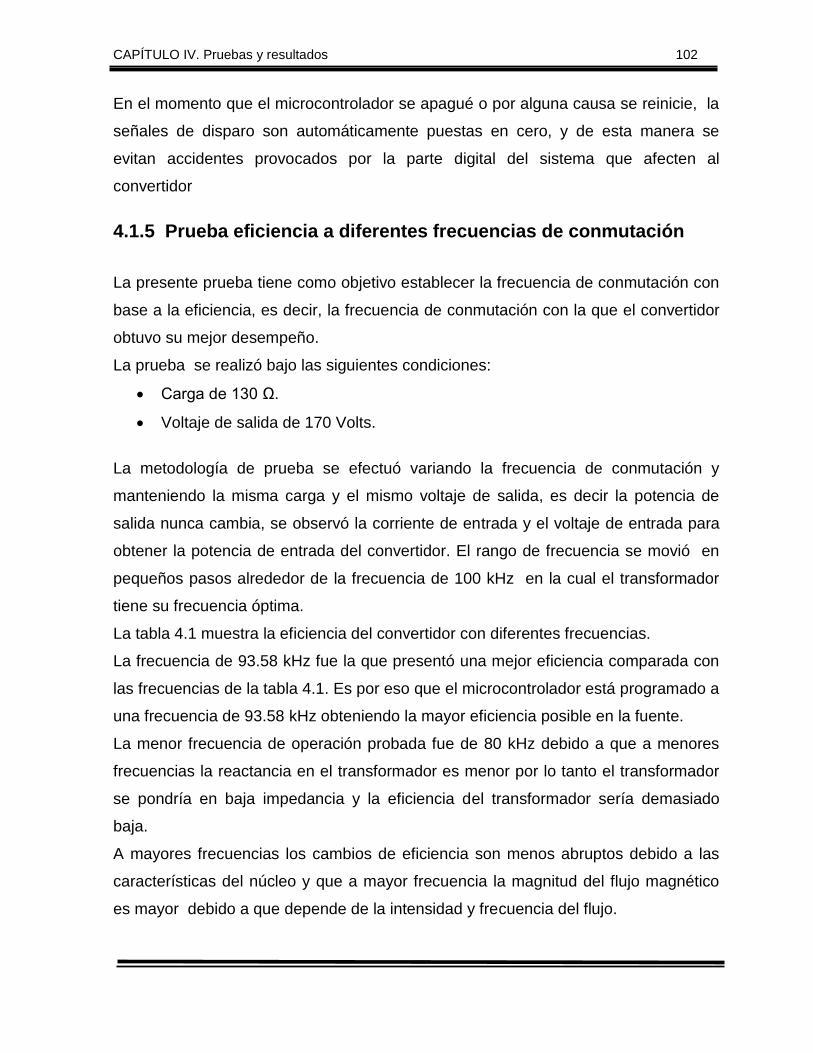
CAPÍTULO IV. Pruebas y resultados 102
En el momento que el microcontrolador se apagué o por alguna causa se reinicie, la
señales de disparo son automáticamente puestas en cero, y de esta manera se
evitan accidentes provocados por la parte digital del sistema que afecten al
convertidor
4.1.5 Prueba eficiencia a diferentes frecuencias de conmutación
La presente prueba tiene como objetivo establecer la frecuencia de conmutación con
base a la eficiencia, es decir, la frecuencia de conmutación con la que el convertidor
obtuvo su mejor desempeño.
La prueba se realizó bajo las siguientes condiciones:
Carga de 130 Ω.
Voltaje de salida de 170 Volts.
La metodología de prueba se efectuó variando la frecuencia de conmutación y
manteniendo la misma carga y el mismo voltaje de salida, es decir la potencia de
salida nunca cambia, se observó la corriente de entrada y el voltaje de entrada para
obtener la potencia de entrada del convertidor. El rango de frecuencia se movió en
pequeños pasos alrededor de la frecuencia de 100 kHz en la cual el transformador
tiene su frecuencia óptima.
La tabla 4.1 muestra la eficiencia del convertidor con diferentes frecuencias.
La frecuencia de 93.58 kHz fue la que presentó una mejor eficiencia comparada con
las frecuencias de la tabla 4.1. Es por eso que el microcontrolador está programado a
una frecuencia de 93.58 kHz obteniendo la mayor eficiencia posible en la fuente.
La menor frecuencia de operación probada fue de 80 kHz debido a que a menores
frecuencias la reactancia en el transformador es menor por lo tanto el transformador
se pondría en baja impedancia y la eficiencia del transformador sería demasiado
baja.
A mayores frecuencias los cambios de eficiencia son menos abruptos debido a las
características del núcleo y que a mayor frecuencia la magnitud del flujo magnético
es mayor debido a que depende de la intensidad y frecuencia del flujo.
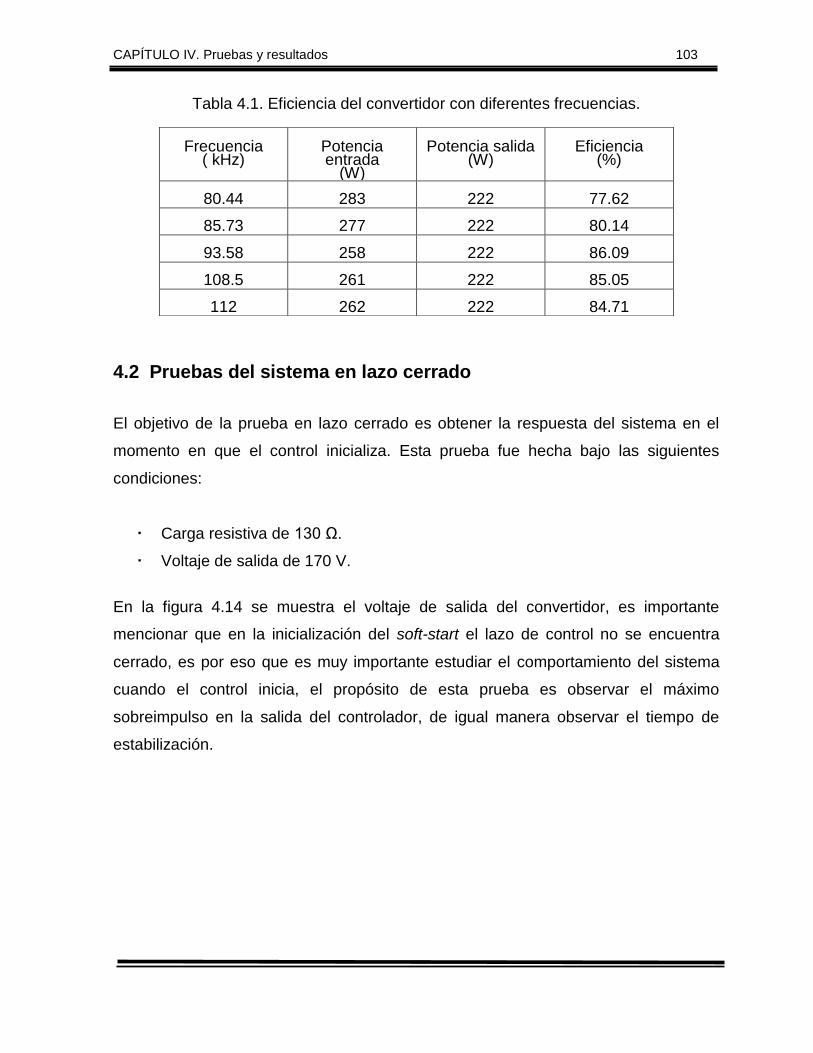
CAPÍTULO IV. Pruebas y resultados 103
Tabla 4.1. Eficiencia del convertidor con diferentes frecuencias.
4.2 Pruebas del sistema en lazo cerrado
El objetivo de la prueba en lazo cerrado es obtener la respuesta del sistema en el
momento en que el control inicializa. Esta prueba fue hecha bajo las siguientes
condiciones:
Carga resistiva de 130 Ω.
Voltaje de salida de 170 V.
En la figura 4.14 se muestra el voltaje de salida del convertidor, es importante
mencionar que en la inicialización del soft-start el lazo de control no se encuentra
cerrado, es por eso que es muy importante estudiar el comportamiento del sistema
cuando el control inicia, el propósito de esta prueba es observar el máximo
sobreimpulso en la salida del controlador, de igual manera observar el tiempo de
estabilización.
Frecuencia ( kHz)
Potencia entrada
(W)
Potencia salida (W)
Eficiencia (%)
80.44 283 222 77.62
85.73 277 222 80.14
93.58 258 222 86.09
108.5 261 222 85.05
112 262 222 84.71
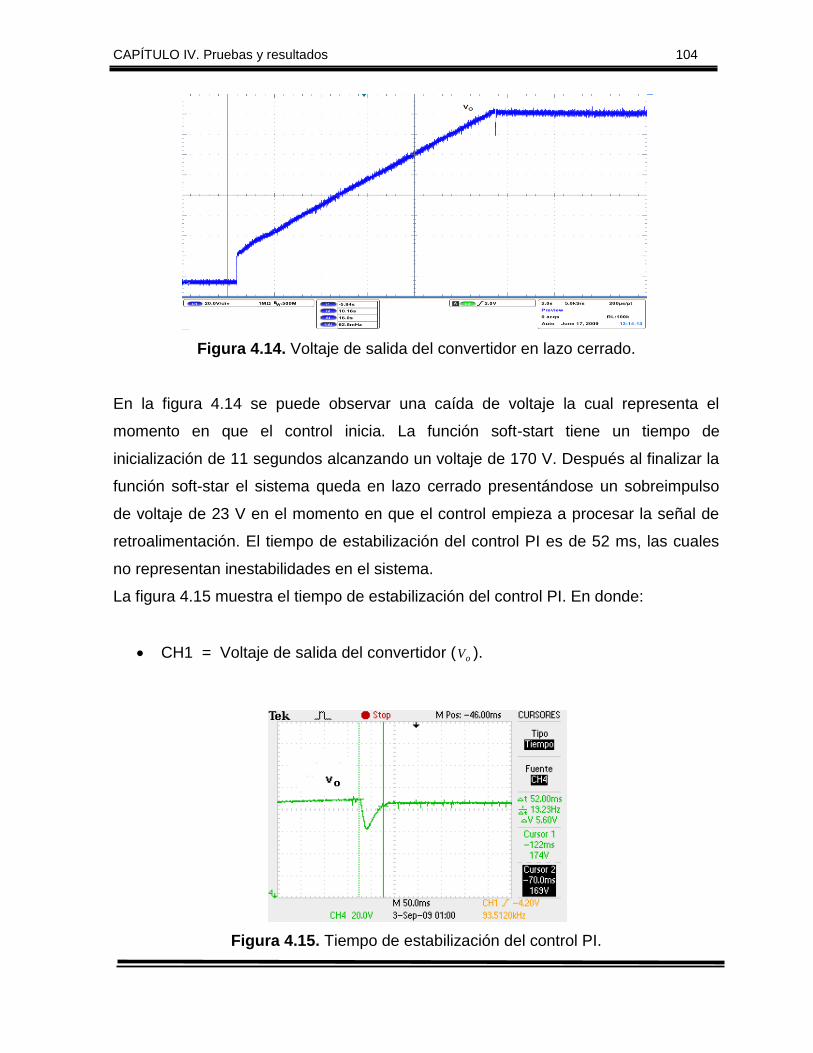
CAPÍTULO IV. Pruebas y resultados 104
Figura 4.14. Voltaje de salida del convertidor en lazo cerrado.
En la figura 4.14 se puede observar una caída de voltaje la cual representa el
momento en que el control inicia. La función soft-start tiene un tiempo de
inicialización de 11 segundos alcanzando un voltaje de 170 V. Después al finalizar la
función soft-star el sistema queda en lazo cerrado presentándose un sobreimpulso
de voltaje de 23 V en el momento en que el control empieza a procesar la señal de
retroalimentación. El tiempo de estabilización del control PI es de 52 ms, las cuales
no representan inestabilidades en el sistema.
La figura 4.15 muestra el tiempo de estabilización del control PI. En donde:
CH1 = Voltaje de salida del convertidor ( oV ).
Figura 4.15. Tiempo de estabilización del control PI.
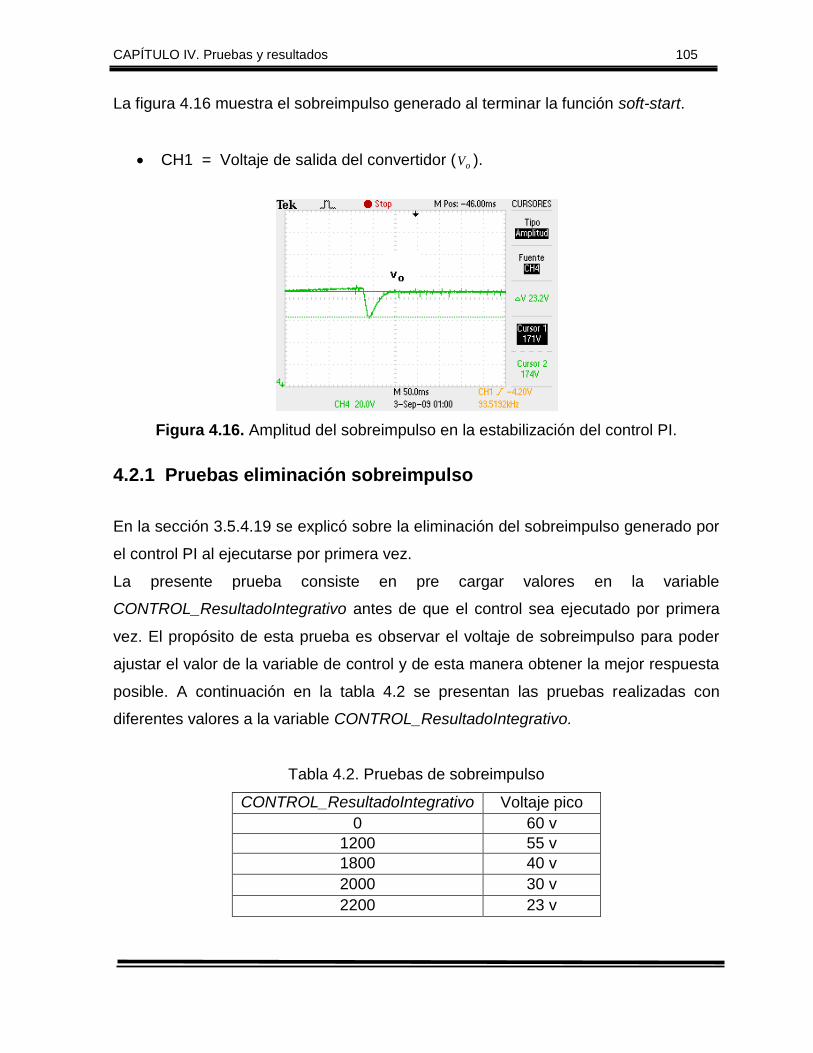
CAPÍTULO IV. Pruebas y resultados 105
La figura 4.16 muestra el sobreimpulso generado al terminar la función soft-start.
CH1 = Voltaje de salida del convertidor ( oV ).
Figura 4.16. Amplitud del sobreimpulso en la estabilización del control PI.
4.2.1 Pruebas eliminación sobreimpulso
En la sección 3.5.4.19 se explicó sobre la eliminación del sobreimpulso generado por
el control PI al ejecutarse por primera vez.
La presente prueba consiste en pre cargar valores en la variable
CONTROL_ResultadoIntegrativo antes de que el control sea ejecutado por primera
vez. El propósito de esta prueba es observar el voltaje de sobreimpulso para poder
ajustar el valor de la variable de control y de esta manera obtener la mejor respuesta
posible. A continuación en la tabla 4.2 se presentan las pruebas realizadas con
diferentes valores a la variable CONTROL_ResultadoIntegrativo.
Tabla 4.2. Pruebas de sobreimpulso
CONTROL_ResultadoIntegrativo Voltaje pico
0 60 v
1200 55 v
1800 40 v
2000 30 v
2200 23 v
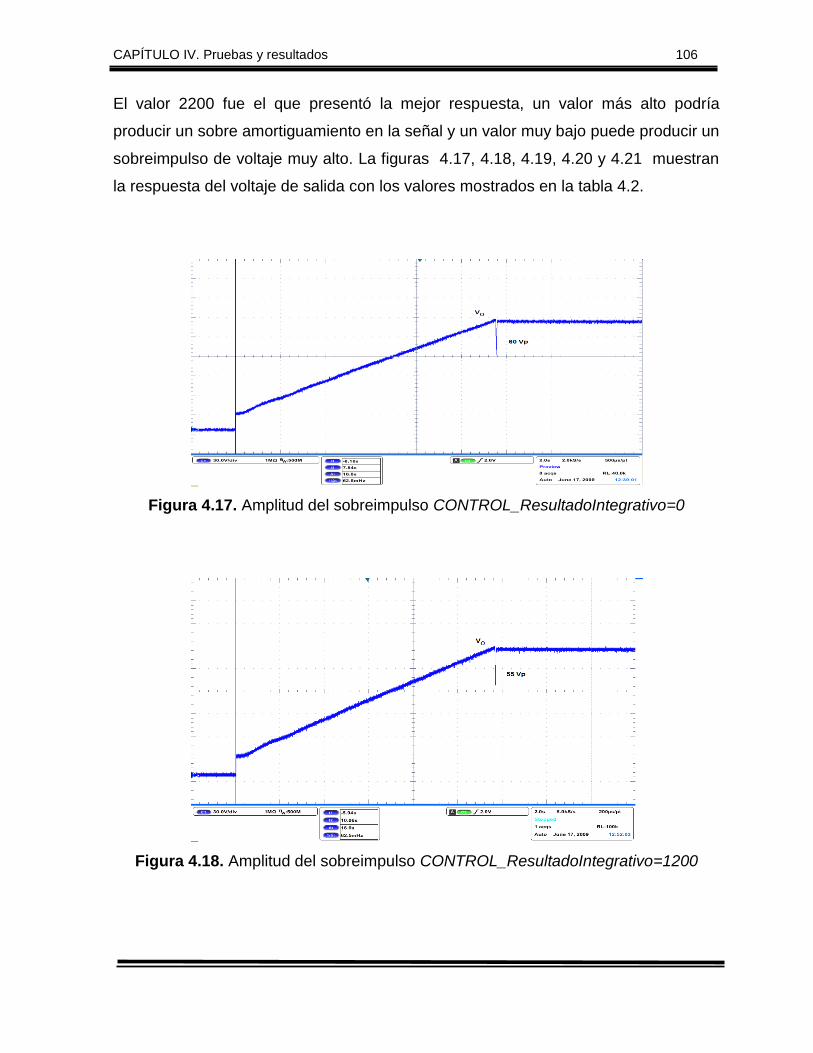
CAPÍTULO IV. Pruebas y resultados 106
El valor 2200 fue el que presentó la mejor respuesta, un valor más alto podría
producir un sobre amortiguamiento en la señal y un valor muy bajo puede producir un
sobreimpulso de voltaje muy alto. La figuras 4.17, 4.18, 4.19, 4.20 y 4.21 muestran
la respuesta del voltaje de salida con los valores mostrados en la tabla 4.2.
Figura 4.17. Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=0
Figura 4.18. Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=1200
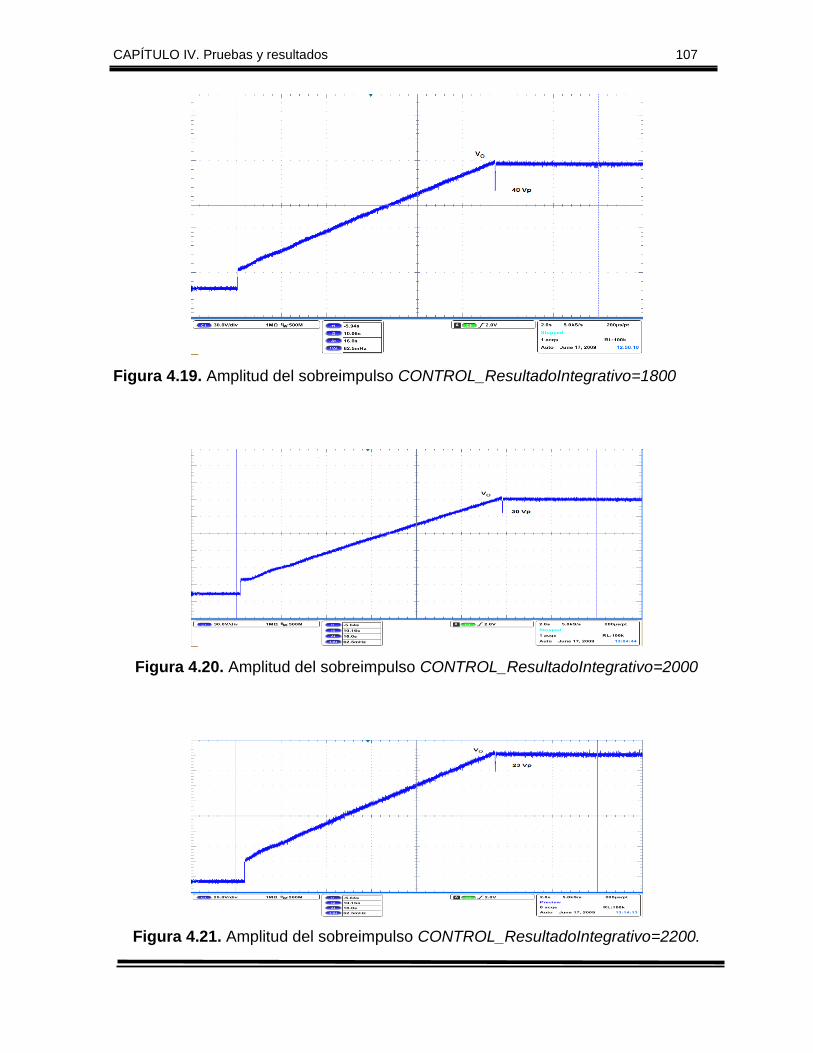
CAPÍTULO IV. Pruebas y resultados 107
Figura 4.19. Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=1800
Figura 4.20. Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=2000
Figura 4.21. Amplitud del sobreimpulso CONTROL_ResultadoIntegrativo=2200.
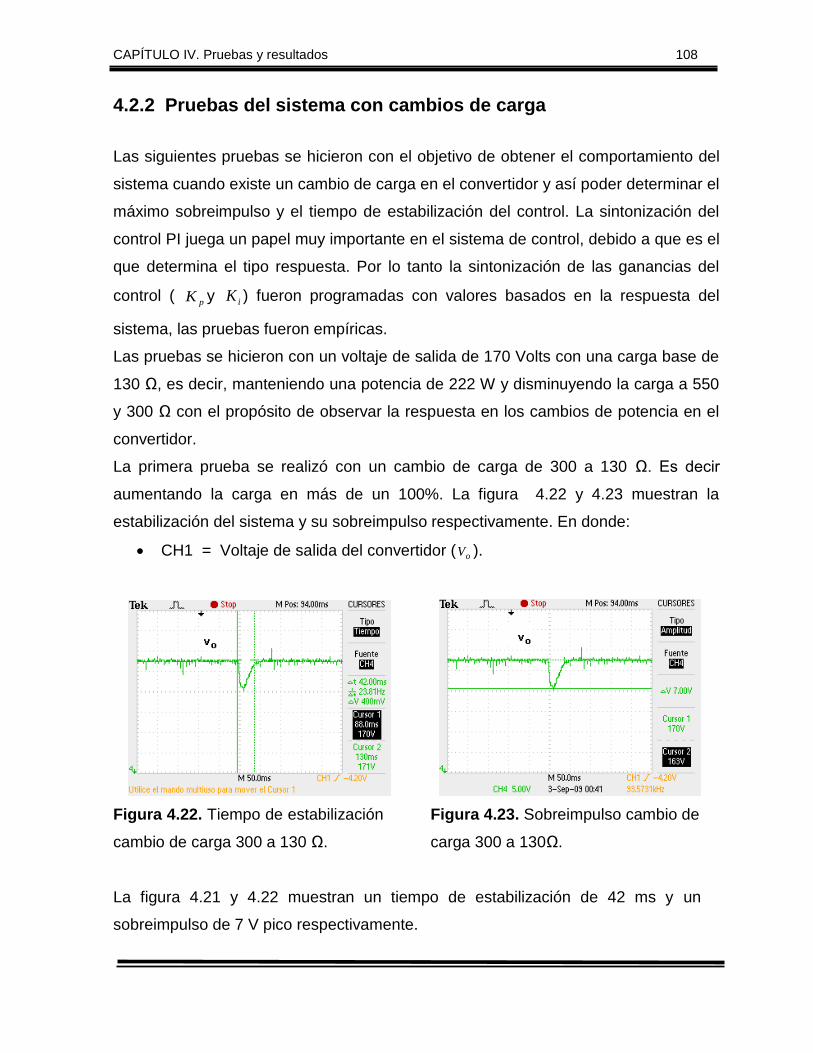
CAPÍTULO IV. Pruebas y resultados 108
4.2.2 Pruebas del sistema con cambios de carga
Las siguientes pruebas se hicieron con el objetivo de obtener el comportamiento del
sistema cuando existe un cambio de carga en el convertidor y así poder determinar el
máximo sobreimpulso y el tiempo de estabilización del control. La sintonización del
control PI juega un papel muy importante en el sistema de control, debido a que es el
que determina el tipo respuesta. Por lo tanto la sintonización de las ganancias del
control ( pK y iK ) fueron programadas con valores basados en la respuesta del
sistema, las pruebas fueron empíricas.
Las pruebas se hicieron con un voltaje de salida de 170 Volts con una carga base de
130 Ω, es decir, manteniendo una potencia de 222 W y disminuyendo la carga a 550
y 300 Ω con el propósito de observar la respuesta en los cambios de potencia en el
convertidor.
La primera prueba se realizó con un cambio de carga de 300 a 130 Ω. Es decir
aumentando la carga en más de un 100%. La figura 4.22 y 4.23 muestran la
estabilización del sistema y su sobreimpulso respectivamente. En donde:
CH1 = Voltaje de salida del convertidor ( oV ).
Figura 4.22. Tiempo de estabilización
cambio de carga 300 a 130 Ω.
Figura 4.23. Sobreimpulso cambio de
carga 300 a 130Ω.
La figura 4.21 y 4.22 muestran un tiempo de estabilización de 42 ms y un
sobreimpulso de 7 V pico respectivamente.
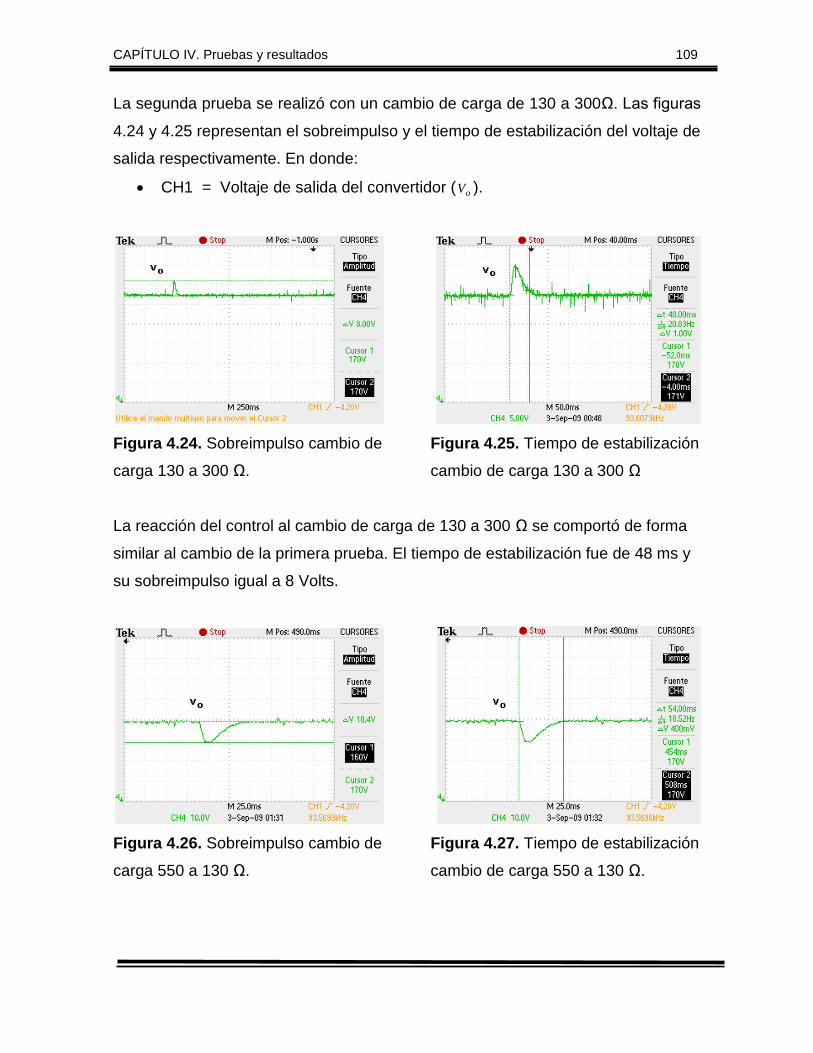
CAPÍTULO IV. Pruebas y resultados 109
La segunda prueba se realizó con un cambio de carga de 130 a 300Ω. Las figuras
4.24 y 4.25 representan el sobreimpulso y el tiempo de estabilización del voltaje de
salida respectivamente. En donde:
CH1 = Voltaje de salida del convertidor ( oV ).
Figura 4.24. Sobreimpulso cambio de
carga 130 a 300 Ω.
Figura 4.25. Tiempo de estabilización
cambio de carga 130 a 300 Ω
La reacción del control al cambio de carga de 130 a 300 Ω se comportó de forma
similar al cambio de la primera prueba. El tiempo de estabilización fue de 48 ms y
su sobreimpulso igual a 8 Volts.
Figura 4.26. Sobreimpulso cambio de
carga 550 a 130 Ω.
Figura 4.27. Tiempo de estabilización
cambio de carga 550 a 130 Ω.
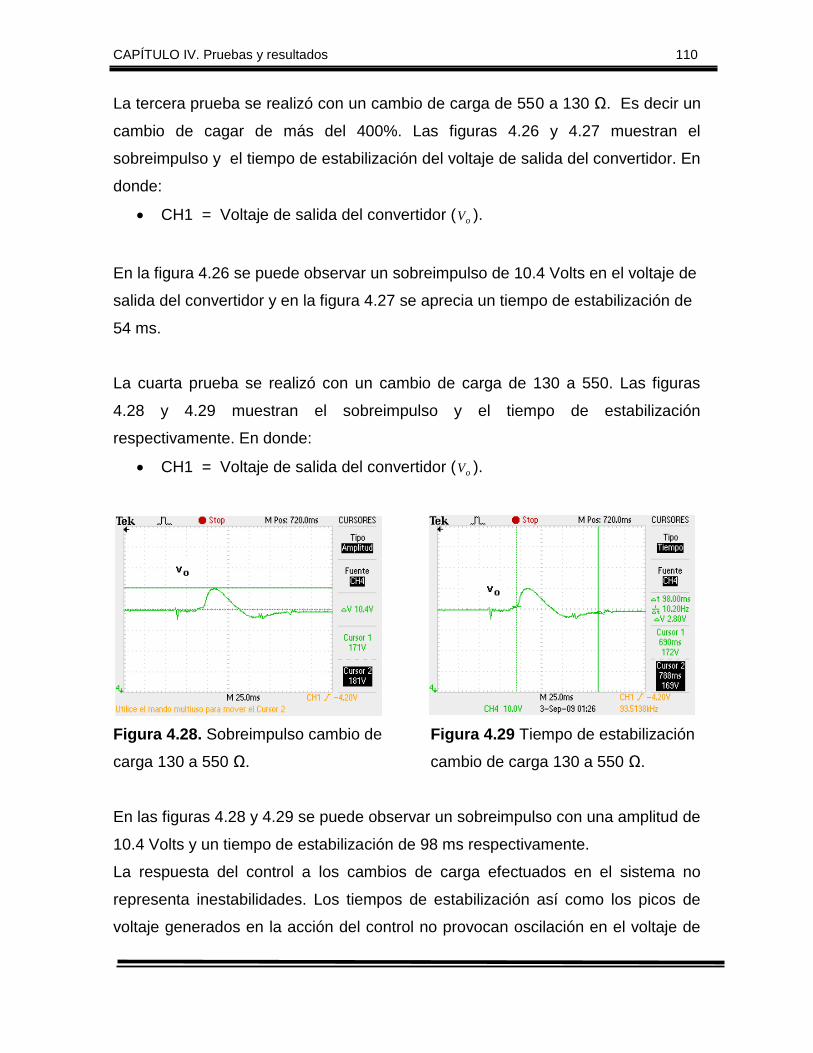
CAPÍTULO IV. Pruebas y resultados 110
La tercera prueba se realizó con un cambio de carga de 550 a 130 Ω. Es decir un
cambio de cagar de más del 400%. Las figuras 4.26 y 4.27 muestran el
sobreimpulso y el tiempo de estabilización del voltaje de salida del convertidor. En
donde:
CH1 = Voltaje de salida del convertidor ( oV ).
En la figura 4.26 se puede observar un sobreimpulso de 10.4 Volts en el voltaje de
salida del convertidor y en la figura 4.27 se aprecia un tiempo de estabilización de
54 ms.
La cuarta prueba se realizó con un cambio de carga de 130 a 550. Las figuras
4.28 y 4.29 muestran el sobreimpulso y el tiempo de estabilización
respectivamente. En donde:
CH1 = Voltaje de salida del convertidor ( oV ).
Figura 4.28. Sobreimpulso cambio de
carga 130 a 550 Ω.
Figura 4.29 Tiempo de estabilización
cambio de carga 130 a 550 Ω.
En las figuras 4.28 y 4.29 se puede observar un sobreimpulso con una amplitud de
10.4 Volts y un tiempo de estabilización de 98 ms respectivamente.
La respuesta del control a los cambios de carga efectuados en el sistema no
representa inestabilidades. Los tiempos de estabilización así como los picos de
voltaje generados en la acción del control no provocan oscilación en el voltaje de
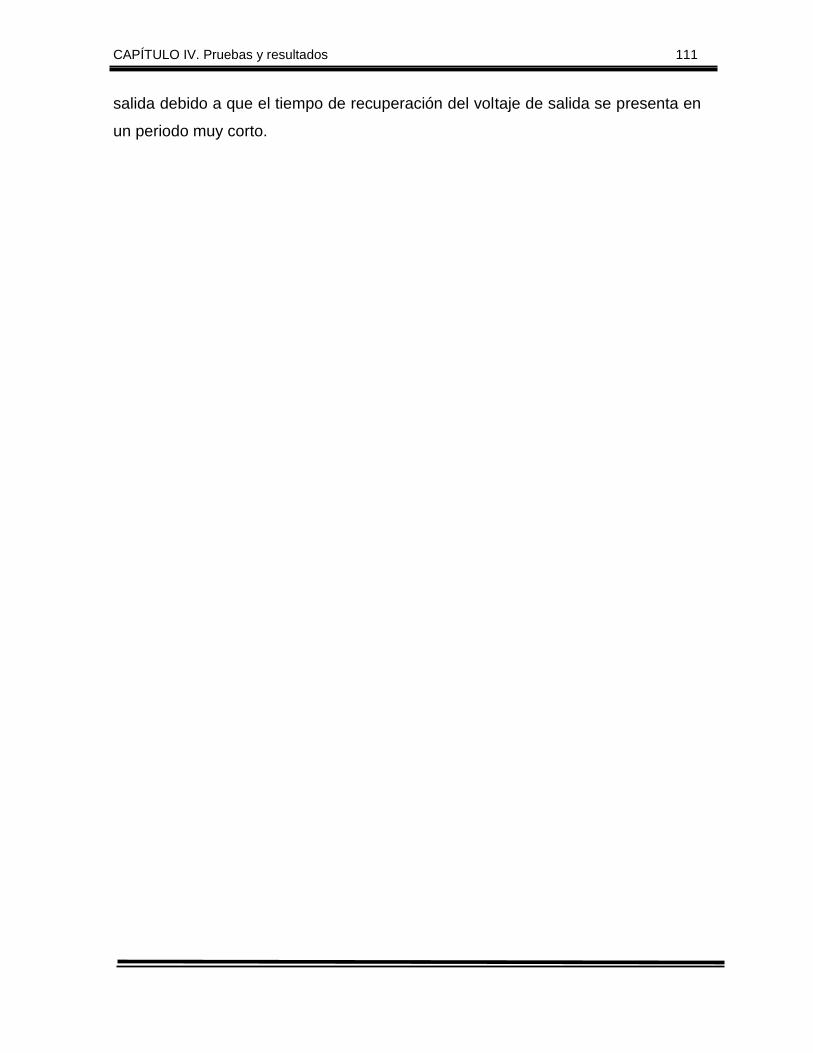
CAPÍTULO IV. Pruebas y resultados 111
salida debido a que el tiempo de recuperación del voltaje de salida se presenta en
un periodo muy corto.
Conclusiones y recomendaciones
Con la finalización de esta tesis, se logró cumplir con los objetivos de investigar los
diferentes tipos de convertidores y los diferentes métodos de control. Se consiguió
implementar un convertidor para aplicaciones fotovoltaicas y el diseño de un
controlador. Con esto se establece un antecedente para el desarrollo de
convertidores controlados a través de un microcontrolador tomando como base la
información recopilada en el desarrollo de esta tesis.
Con la implementación de un convertidor CD-CD topología push-pull se logró
alcanzar una eficiencia del 86% y una potencia máxima de 222 W. En la
implementación del convertidor, circuitos de protección y filtrado de la señal se
obtuvo el rendimiento correcto. El transformador de alta frecuencia se construyó de
manera eficiente para el convertidor jugando un papel de suma importancia en la
eficiencia final de la fuente push-pull.
Conclusiones y recomendaciones 113
Las pérdidas de energía en el núcleo ferromagnético así como las pérdidas
presentes en los devanados primarios del transformador no fueron medidas
cuantificadas. Las pérdidas se analizaron con relación a la eficiencia del sistema en
general.
La fiabilidad del sistema se logró incrementar con la instalación de los circuitos de
protección (snubbers), estos circuitos son de suma importancia para cualquier
sistema de conversión de potencia debido a que al tener un control sobre los picos
de voltaje generados en la etapa de potencia del convertidor push-pull se logró
incrementar el tiempo de vida de los dispositivos de conmutación y la eficiencia del
convertidor disminuyendo las pérdidas generadas por conmutación haciendo un
sistema confiable.
La adecuación de la señal del sensado fue correcta, el sensado a través de un
divisor resistivo no genera pérdidas que afecten de manera significativa la eficiencia
al convertidor push-pull.
En el lazo cerrado del sistema el algoritmo de control elegido para el desarrollo de
esta tesis fue un algoritmo PI, el cual fue implementado en un controlador digital de
señales. Con este algoritmo se logró obtener una eficiente respuesta del sistema
respecto a las variaciones de carga, la respuesta del sistema de control (máximo
sobreimpulso y el tiempo de estabilización) no representan inestabilidades en el
voltaje de salida del convertidor.
El microcontrolador elegido es un controlador digital de señales específicamente
diseñado para convertidores de potencia el cual representa ventajas para este tipo
de aplicaciones debido a que maneja módulos diseñados con el objetivo de
implementar convertidores de potencia de una manera más eficiente.
El convertidor y los dispositivos de control se implementaron en una placa de circuito
impreso.
Con la experiencia obtenida en el desarrollo de esta tesis se pueden realizar una
serie de recomendaciones con el objetivo de mejorar el desempeño del sistema. De
esta manera se deja abierto el proyecto para futuras mejoras al sistema.
Conclusiones y recomendaciones 114
La primera recomendación que se hace es tratar eliminar las dos fuentes de
alimentación de 12 V cada una que utiliza el sistema para energizar la parte de
potencia y la parte digital.
La alimentación de la etapa potencia que corresponde al encendido del driver de
disparo para los transistores y la alimentación de los optoacopladores se puede
eliminar utilizando el voltaje de alimentación de 24 V proveniente de las baterías que
alimentan al convertidor push-pull.
La alimentación de la etapa de digital corresponde a la alimentación del
microcontrolador y al amplificador operacional se puede eliminar agregando al
sistema otra fuente push-pull con una relación de transformación 1:1, alimentada a
partir de los 24 V de las baterías. De esta manera se lograría la eliminación de la
etapa digital y cumpliría con el aislamiento necesario entre las dos etapas.
También es posible mejorar la eficiencia del convertidor realizando pruebas con
diferentes tipos de núcleos ferromagnético y diferentes frecuencias de conmutación
de esta manera es posible encontrar la máxima eficiencia en un convertidor push-pull
para aplicaciones fotovoltaicas.
Por último es posible probar con diferentes algoritmos de control y de esta manera
hacer una comparación entre ellos. Debido a que el algoritmo de control
implementado resulta factible para el sistema ya que fue implementado de una
manera sencilla y con pocos recursos de procesamiento en el microcontrolador. Se
puede recomendar estudiar diferentes algoritmos de control que puedan ser
implementados digitalmente en este tipo de convertidores con el objetivo de seguir
investigando nuevos algoritmos de control que puedan ser aplicados a convertidores
de potencia.
BIBLIOGRAFÍA
1. CFE, Comisión federal de electricidad, (página Web) http://www.cfe.gob.mx,
consultada en junio de 2009.
2. ISES, the International solar energy society, (página Web)
http://www.ises.org, consultada en junio de 2009 [2]
3. CINVESTAV, Especialidad de Electrónica del Estado Sólido, (Página Web),
http://www.sees.cinvestav.mx/, Consultada en junio de 2009.
4. PEÑUELAS Machado José Ángel, “Algoritmo de Seguimiento del Máximo
Punto de Potencia para Sistemas Fotovoltaicos en Cd. Obregón, Sonora”,
Tesis de Ingeniero en Electrónica, Instituto Tecnológico de Sonora, Cd.
Obregón, Sonora, Octubre de 2008.
5. ANGULO Guzmán Sara Yael, “Aportación al desarrollo de un inversor
monofásico para sistemas fotovoltaicos interconectados con énfasis en una
técnica de control lineal”, Tesis de Ingeniero en Electrónica, Instituto
Tecnológico de Sonora, Cd. Obregón, Sonora, Mayo de 2009.
6. MUHAMMAD H. Rashid, “Power Electronics Handbook”, Academic Press,
Primera edición, 2001.
7. MUHAMMAD H. Rashid, “Electrónica de potencia. Circuitos, Dispositivos y
aplicaciones”. Editorial Pearson educación, Tercera edición, 2004.
8. PEÑUELAS Machado José Ángel, “Algoritmo de Seguimiento del Máximo
Punto de Potencia para Sistemas Fotovoltaicos en Cd. Obregón, Sonora”,
Tesis de Ingeniero en Electrónica, Instituto Tecnológico de Sonora, Cd.
Obregón, Sonora, Octubre de 2008.
Bibliografía 116
9. ANGULO Guzmán Sara Yael, “Aportación al desarrollo de un inversor
monofásico para sistemas fotovoltaicos interconectados con énfasis en una
técnica de control lineal”, Tesis de Ingeniero en Electrónica, Instituto
Tecnológico de Sonora, Cd. Obregón, Sonora, Mayo de 2009.
10. Universidad de Valencia, (página Web), http://www.uv.es/etse
“sistemas eléctricos de alimentación”. Consultada en junio de 2009.
11. SANCHEZ López Juan De Dios, “Dispositivos electrónicos de potencia”,
Editorial universidad autónoma de baja California UABC, Segunda edición,
2002.
12. CHAPMAN J. Stephen, “Máquinas eléctricas”, Editorial McGRAW-Hill
Interamericana, Tercera edición 2003.
13. AVELINO Pérez Pedro, “Transformadores de distribución: Teoría, calculo,
construcción y pruebas “, Editorial Reverte, Segunda edición 2001.
14. SANJIT K. Mitra, “procesamiento de señales digitales: un enfoque basado en
computadora”, Editorial McGRAW-Hill, tercera edición 2007.
15. BOLTON W, “Mecatrónica: sistema de control electrónico en la ingeniería
mecánica y eléctrica”, Editorial Alfaomega, tercera edición 2006.
16. SHANNON C.E,” comunicación en presencia de ruido”, Editorial IRE, Edición
1949.
17. MICROCHIP Technology Inc., “Getting Started with dsPIC30F Digital Signal
Controllers User’s Guide”, 2005, (Página Web),
Bibliografía 117
http://ww1.microchip.com/downloads/en/DeviceDoc/70151a.pdf, consultada en
mayo 2009.
18. MICROCHIP Technology Inc., dsPIC30F Family Reference Manual, (Página
Web),
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId
=2574, consultada en mayo de 2009.
19. MICROCHIP Technology Inc., dsPIC33F Family Reference Manual, (Página
Web),
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId
=2573, consultada en Noviembre de 2008.
20. MICROCHIP Technology Inc., dsPIC30F1010/202X, Datasheet, (Página
Web), http://ww1.microchip.com/downloads/en/DeviceDoc/70178C.pdf,
Consultada en Noviembre 2008.
21. MICROCHIP Technology Inc., “MPLAB IDE User’s Guide”, 2006, (Página
Web), http://ww1.microchip.com/downloads/en/DeviceDoc/51519a.pdf,
Consultada en Noviembre 2008.
22. MICROCHIP Technology Inc., “MPLAB C30 C Compiler User`s Guide”, 2007,
(Página Web),
http://ww1.microchip.com/downloads/en/DeviceDoc/C30_Users_Guide_51284
e.pdf, consultada en Noviembre 2008.
23. DOMITSU Kono Manuel, “Programación en el lenguaje C”, (Página Web),
Http://www.itson.mx/die/mdomitsu/bibliotecaDigital/Programacion_Lenguaje_C
, consultada en Noviembre 2008.
Bibliografía 118
24. BOYLESTAD Robert L, “Introducción al análisis de circuitos”, Editorial
PEARSON, décima edición 2004.
25. Micrometals Inc, “Iron Powder Cores”, 2008 (Página Web),
http://www.micrometals.com/ Consultada en Noviembre 2008.
26. Micrometals Inc, “Iron Powder Cores”, 2008 (Página Web),
http://www.micrometals.com/materials_index.html, Consultada en diciembre
2008.
27. MICROCHIP Technology Inc, “dsPIC30F2020 Rev.A1 Silicon Errata”, 2007,
(Página Web), http://ww1.microchip.com/downloads/en/DeviceDoc/80290J.pdf
consultada en abril 2009.
28. Liquid Crystal Display LCD, “How to use intelligent LCD”, 1997 (Página Web),
http://lcd-linux.sourceforge.net/pdfdocs/lcd1.pdf. Consultada en febrero 2008.
APÉNDICE A
Código fuente del programa para la
implementación del algoritmo de control,
filtrado y despliegue de la señal
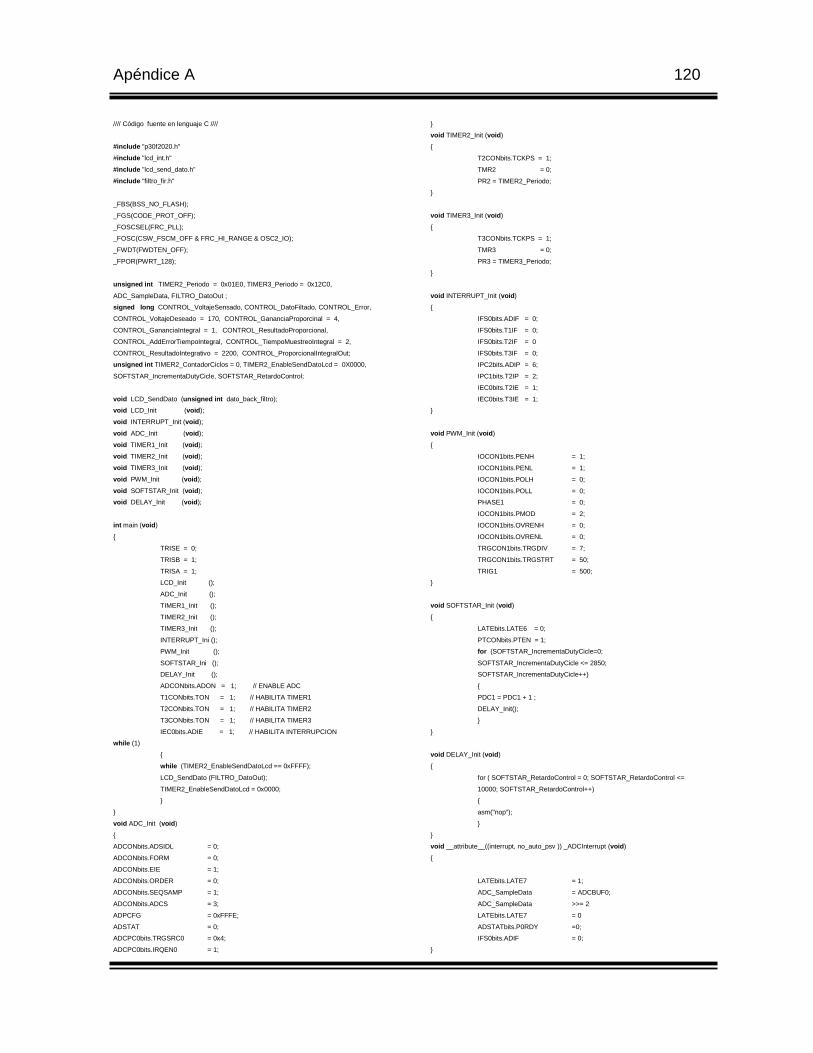
Apéndice A 120
//// Código fuente en lenguaje C ////
#include "p30f2020.h"
#include "lcd_int.h"
#include "lcd_send_dato.h"
#include "filtro_fir.h"
_FBS(BSS_NO_FLASH);
_FGS(CODE_PROT_OFF);
_FOSCSEL(FRC_PLL);
_FOSC(CSW_FSCM_OFF & FRC_HI_RANGE & OSC2_IO);
_FWDT(FWDTEN_OFF);
_FPOR(PWRT_128);
unsigned int TIMER2_Periodo = 0x01E0, TIMER3_Periodo = 0x12C0, ///MODIFICARRRRRRRRRRRRR
ADC_SampleData, FILTRO_DatoOut ;
signed long CONTROL_VoltajeSensado, CONTROL_DatoFiltado, CONTROL_Error,
CONTROL_VoltajeDeseado = 170, CONTROL_GananciaProporcinal = 4,
CONTROL_GananciaIntegral = 1, CONTROL_ResultadoProporcional,
CONTROL_AddErrorTiempoIntegral, CONTROL_TiempoMuestreoIntegral = 2,
CONTROL_ResultadoIntegrativo = 2200, CONTROL_ProporcionalIntegralOut;
unsigned int TIMER2_ContadorCiclos = 0, TIMER2_EnableSendDatoLcd = 0X0000,
SOFTSTAR_IncrementaDutyCicle, SOFTSTAR_RetardoControl;
void LCD_SendDato (unsigned int dato_back_filtro);
void LCD_Init (void);
void INTERRUPT_Init (void);
void ADC_Init (void);
void TIMER1_Init (void);
void TIMER2_Init (void);
void TIMER3_Init (void);
void PWM_Init (void);
void SOFTSTAR_Init (void);
void DELAY_Init (void);
// 500HZ...FRECUENCIA CONTROL 1/2 FF
int main (void)
TRISE = 0;
TRISB = 1;
TRISA = 1;
LCD_Init ();
ADC_Init ();
TIMER1_Init ();
TIMER2_Init ();
TIMER3_Init ();
INTERRUPT_Ini ();
PWM_Init ();
SOFTSTAR_Ini ();
DELAY_Init ();
ADCONbits.ADON = 1; // ENABLE ADC
T1CONbits.TON = 1; // HABILITA TIMER1
T2CONbits.TON = 1; // HABILITA TIMER2
T3CONbits.TON = 1; // HABILITA TIMER3
IEC0bits.ADIE = 1; // HABILITA INTERRUPCION
while (1)
while (TIMER2_EnableSendDatoLcd == 0xFFFF);
LCD_SendDato (FILTRO_DatoOut);
TIMER2_EnableSendDatoLcd = 0x0000;
void ADC_Init (void)
ADCONbits.ADSIDL = 0;
ADCONbits.FORM = 0;
ADCONbits.EIE = 1;
ADCONbits.ORDER = 0;
ADCONbits.SEQSAMP = 1;
ADCONbits.ADCS = 3;
ADPCFG = 0xFFFE;
ADSTAT = 0;
ADCPC0bits.TRGSRC0 = 0x4;
ADCPC0bits.IRQEN0 = 1;
void TIMER2_Init (void)
T2CONbits.TCKPS = 1;
TMR2 = 0;
PR2 = TIMER2_Periodo;
void TIMER3_Init (void)
T3CONbits.TCKPS = 1;
TMR3 = 0;
PR3 = TIMER3_Periodo;
void INTERRUPT_Init (void)
IFS0bits.ADIF = 0;
IFS0bits.T1IF = 0;
IFS0bits.T2IF = 0
IFS0bits.T3IF = 0;
IPC2bits.ADIP = 6;
IPC1bits.T2IP = 2;
IEC0bits.T2IE = 1;
IEC0bits.T3IE = 1;
void PWM_Init (void)
IOCON1bits.PENH = 1;
IOCON1bits.PENL = 1;
IOCON1bits.POLH = 0;
IOCON1bits.POLL = 0;
PHASE1 = 0;
IOCON1bits.PMOD = 2;
IOCON1bits.OVRENH = 0;
IOCON1bits.OVRENL = 0;
TRGCON1bits.TRGDIV = 7;
TRGCON1bits.TRGSTRT = 50;
TRIG1 = 500;
void SOFTSTAR_Init (void)
LATEbits.LATE6 = 0;
PTCONbits.PTEN = 1;
for (SOFTSTAR_IncrementaDutyCicle=0;
SOFTSTAR_IncrementaDutyCicle <= 2850;
SOFTSTAR_IncrementaDutyCicle++)
PDC1 = PDC1 + 1 ;
DELAY_Init();
void DELAY_Init (void)
for ( SOFTSTAR_RetardoControl = 0; SOFTSTAR_RetardoControl <=
10000; SOFTSTAR_RetardoControl++)
asm("nop");
void __attribute__((interrupt, no_auto_psv )) _ADCInterrupt (void)
LATEbits.LATE7 = 1;
ADC_SampleData = ADCBUF0;
ADC_SampleData >>= 2
LATEbits.LATE7 = 0
ADSTATbits.P0RDY =0;
IFS0bits.ADIF = 0;
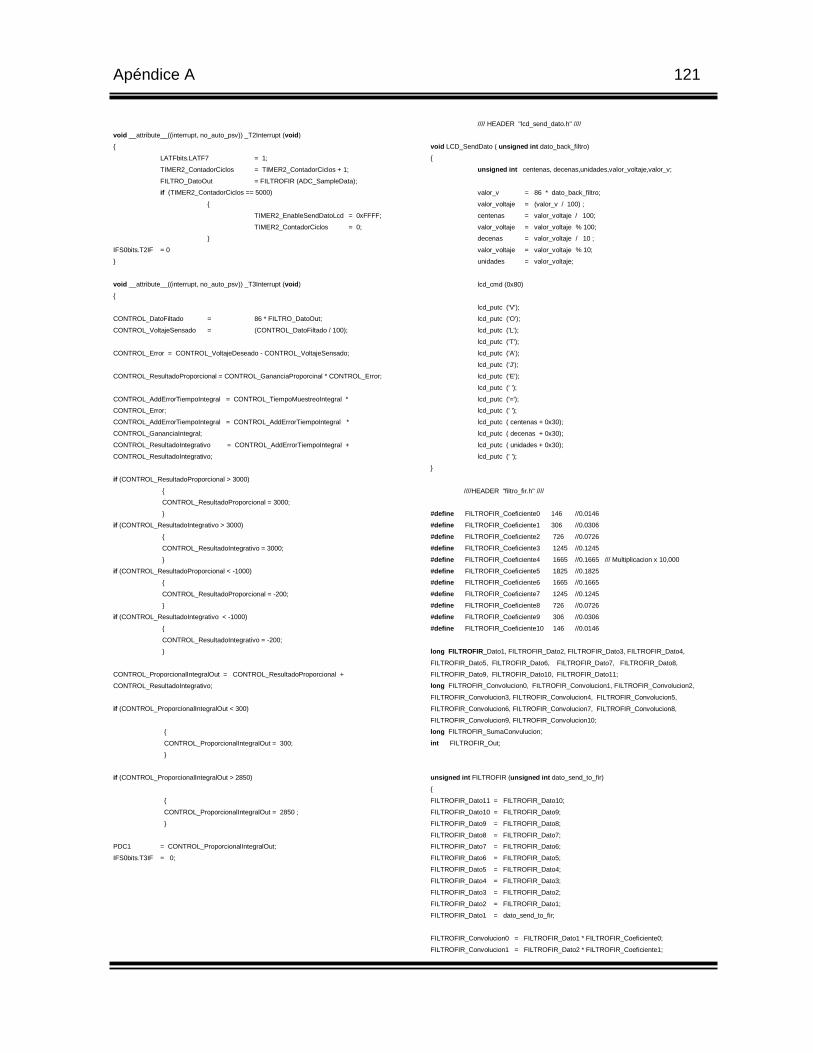
Apéndice A 121
void __attribute__((interrupt, no_auto_psv)) _T2Interrupt (void)
LATFbits.LATF7 = 1;
TIMER2_ContadorCiclos = TIMER2_ContadorCiclos + 1;
FILTRO_DatoOut = FILTROFIR (ADC_SampleData);
if (TIMER2_ContadorCiclos == 5000)
TIMER2_EnableSendDatoLcd = 0xFFFF;
TIMER2_ContadorCiclos = 0;
IFS0bits.T2IF = 0
void __attribute__((interrupt, no_auto_psv)) _T3Interrupt (void)
CONTROL_DatoFiltado = 86 * FILTRO_DatoOut;
CONTROL_VoltajeSensado = (CONTROL_DatoFiltado / 100);
CONTROL_Error = CONTROL_VoltajeDeseado - CONTROL_VoltajeSensado;
CONTROL_ResultadoProporcional = CONTROL_GananciaProporcinal * CONTROL_Error;
CONTROL_AddErrorTiempoIntegral = CONTROL_TiempoMuestreoIntegral *
CONTROL_Error;
CONTROL_AddErrorTiempoIntegral = CONTROL_AddErrorTiempoIntegral *
CONTROL_GananciaIntegral;
CONTROL_ResultadoIntegrativo = CONTROL_AddErrorTiempoIntegral +
CONTROL_ResultadoIntegrativo;
if (CONTROL_ResultadoProporcional > 3000)
CONTROL_ResultadoProporcional = 3000;
if (CONTROL_ResultadoIntegrativo > 3000)
CONTROL_ResultadoIntegrativo = 3000;
if (CONTROL_ResultadoProporcional < -1000)
CONTROL_ResultadoProporcional = -200;
if (CONTROL_ResultadoIntegrativo < -1000)
CONTROL_ResultadoIntegrativo = -200;
CONTROL_ProporcionalIntegralOut = CONTROL_ResultadoProporcional +
CONTROL_ResultadoIntegrativo;
if (CONTROL_ProporcionalIntegralOut < 300)
CONTROL_ProporcionalIntegralOut = 300;
if (CONTROL_ProporcionalIntegralOut > 2850)
CONTROL_ProporcionalIntegralOut = 2850 ;
PDC1 = CONTROL_ProporcionalIntegralOut;
IFS0bits.T3IF = 0;
//// HEADER "lcd_send_dato.h" ////
void LCD_SendDato ( unsigned int dato_back_filtro)
unsigned int centenas, decenas,unidades,valor_voltaje,valor_v;
valor_v = 86 * dato_back_filtro;
valor_voltaje = (valor_v / 100) ;
centenas = valor_voltaje / 100;
valor_voltaje = valor_voltaje % 100;
decenas = valor_voltaje / 10 ;
valor_voltaje = valor_voltaje % 10;
unidades = valor_voltaje;
lcd_cmd (0x80)
lcd_putc ('V');
lcd_putc ('O');
lcd_putc ('L');
lcd_putc ('T');
lcd_putc ('A');
lcd_putc ('J');
lcd_putc ('E');
lcd_putc (' ');
lcd_putc ('=');
lcd_putc (' ');
lcd_putc ( centenas + 0x30);
lcd_putc ( decenas + 0x30);
lcd_putc ( unidades + 0x30);
lcd_putc (' ');
////HEADER "filtro_fir.h" ////
#define FILTROFIR_Coeficiente0 146 //0.0146
#define FILTROFIR_Coeficiente1 306 //0.0306
#define FILTROFIR_Coeficiente2 726 //0.0726
#define FILTROFIR_Coeficiente3 1245 //0.1245
#define FILTROFIR_Coeficiente4 1665 //0.1665 /// Multiplicacion x 10,000
#define FILTROFIR_Coeficiente5 1825 //0.1825
#define FILTROFIR_Coeficiente6 1665 //0.1665
#define FILTROFIR_Coeficiente7 1245 //0.1245
#define FILTROFIR_Coeficiente8 726 //0.0726
#define FILTROFIR_Coeficiente9 306 //0.0306
#define FILTROFIR_Coeficiente10 146 //0.0146
long FILTROFIR_Dato1, FILTROFIR_Dato2, FILTROFIR_Dato3, FILTROFIR_Dato4,
FILTROFIR_Dato5, FILTROFIR_Dato6, FILTROFIR_Dato7, FILTROFIR_Dato8,
FILTROFIR_Dato9, FILTROFIR_Dato10, FILTROFIR_Dato11;
long FILTROFIR_Convolucion0, FILTROFIR_Convolucion1, FILTROFIR_Convolucion2,
FILTROFIR_Convolucion3, FILTROFIR_Convolucion4, FILTROFIR_Convolucion5,
FILTROFIR_Convolucion6, FILTROFIR_Convolucion7, FILTROFIR_Convolucion8,
FILTROFIR_Convolucion9, FILTROFIR_Convolucion10;
long FILTROFIR_SumaConvulucion;
int FILTROFIR_Out;
unsigned int FILTROFIR (unsigned int dato_send_to_fir)
FILTROFIR_Dato11 = FILTROFIR_Dato10;
FILTROFIR_Dato10 = FILTROFIR_Dato9;
FILTROFIR_Dato9 = FILTROFIR_Dato8;
FILTROFIR_Dato8 = FILTROFIR_Dato7;
FILTROFIR_Dato7 = FILTROFIR_Dato6;
FILTROFIR_Dato6 = FILTROFIR_Dato5;
FILTROFIR_Dato5 = FILTROFIR_Dato4;
FILTROFIR_Dato4 = FILTROFIR_Dato3;
FILTROFIR_Dato3 = FILTROFIR_Dato2;
FILTROFIR_Dato2 = FILTROFIR_Dato1;
FILTROFIR_Dato1 = dato_send_to_fir;
FILTROFIR_Convolucion0 = FILTROFIR_Dato1 * FILTROFIR_Coeficiente0;
FILTROFIR_Convolucion1 = FILTROFIR_Dato2 * FILTROFIR_Coeficiente1;
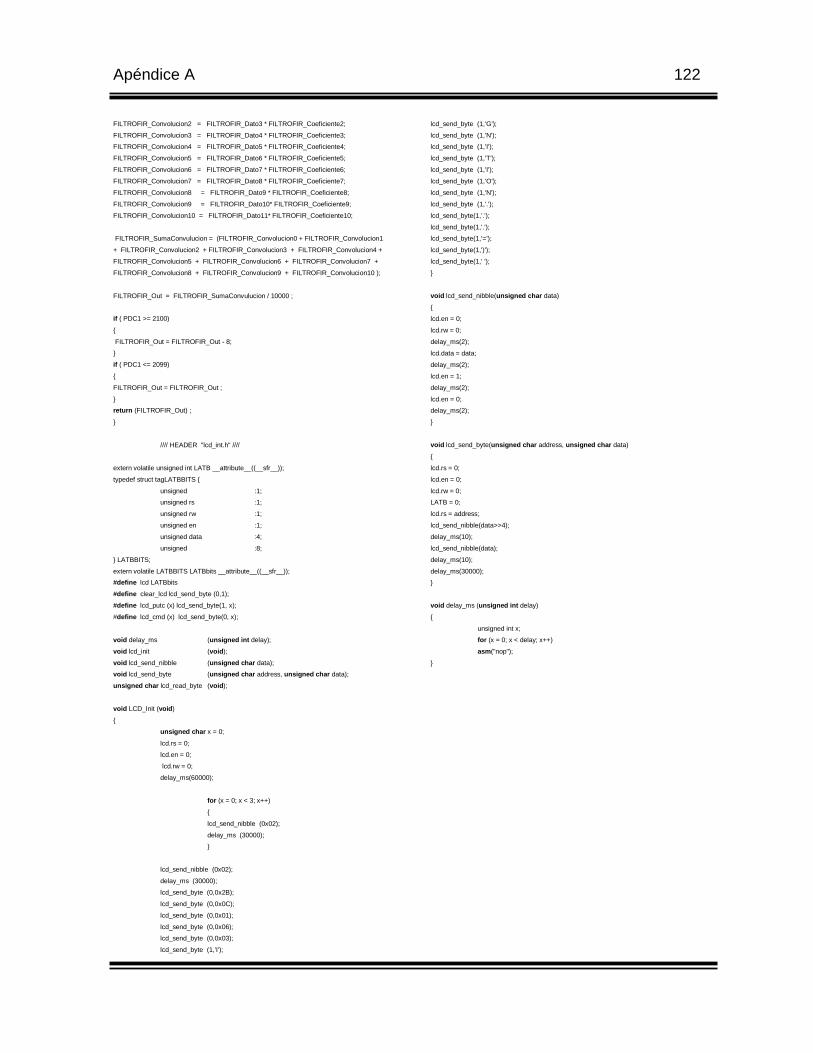
Apéndice A 122
FILTROFIR_Convolucion2 = FILTROFIR_Dato3 * FILTROFIR_Coeficiente2;
FILTROFIR_Convolucion3 = FILTROFIR_Dato4 * FILTROFIR_Coeficiente3;
FILTROFIR_Convolucion4 = FILTROFIR_Dato5 * FILTROFIR_Coeficiente4;
FILTROFIR_Convolucion5 = FILTROFIR_Dato6 * FILTROFIR_Coeficiente5;
FILTROFIR_Convolucion6 = FILTROFIR_Dato7 * FILTROFIR_Coeficiente6;
FILTROFIR_Convolucion7 = FILTROFIR_Dato8 * FILTROFIR_Coeficiente7;
FILTROFIR_Convolucion8 = FILTROFIR_Dato9 * FILTROFIR_Coeficiente8;
FILTROFIR_Convolucion9 = FILTROFIR_Dato10* FILTROFIR_Coeficiente9;
FILTROFIR_Convolucion10 = FILTROFIR_Dato11* FILTROFIR_Coeficiente10;
FILTROFIR_SumaConvulucion = (FILTROFIR_Convolucion0 + FILTROFIR_Convolucion1
+ FILTROFIR_Convolucion2 + FILTROFIR_Convolucion3 + FILTROFIR_Convolucion4 +
FILTROFIR_Convolucion5 + FILTROFIR_Convolucion6 + FILTROFIR_Convolucion7 +
FILTROFIR_Convolucion8 + FILTROFIR_Convolucion9 + FILTROFIR_Convolucion10 );
FILTROFIR_Out = FILTROFIR_SumaConvulucion / 10000 ;
if ( PDC1 >= 2100)
FILTROFIR_Out = FILTROFIR_Out - 8;
if ( PDC1 <= 2099)
FILTROFIR_Out = FILTROFIR_Out ;
return (FILTROFIR_Out) ;
//// HEADER "lcd_int.h" ////
extern volatile unsigned int LATB __attribute__((__sfr__));
typedef struct tagLATBBITS
unsigned :1;
unsigned rs :1;
unsigned rw :1;
unsigned en :1;
unsigned data :4;
unsigned :8;
LATBBITS;
extern volatile LATBBITS LATBbits __attribute__((__sfr__));
#define lcd LATBbits
#define clear_lcd lcd_send_byte (0,1);
#define lcd_putc (x) lcd_send_byte(1, x);
#define lcd_cmd (x) lcd_send_byte(0, x);
void delay_ms (unsigned int delay);
void lcd_init (void);
void lcd_send_nibble (unsigned char data);
void lcd_send_byte (unsigned char address, unsigned char data);
unsigned char lcd_read_byte (void);
void LCD_Init (void)
unsigned char x = 0;
lcd.rs = 0;
lcd.en = 0;
lcd.rw = 0;
delay_ms(60000);
for (x = 0; x < 3; x++)
lcd_send_nibble (0x02);
delay_ms (30000);
lcd_send_nibble (0x02);
delay_ms (30000);
lcd_send_byte (0,0x2B);
lcd_send_byte (0,0x0C);
lcd_send_byte (0,0x01);
lcd_send_byte (0,0x06);
lcd_send_byte (0,0x03);
lcd_send_byte (1,'I');
lcd_send_byte (1,'G');
lcd_send_byte (1,'N');
lcd_send_byte (1,'I');
lcd_send_byte (1,'T');
lcd_send_byte (1,'I');
lcd_send_byte (1,'O');
lcd_send_byte (1,'N');
lcd_send_byte (1,'.');
lcd_send_byte(1,'.');
lcd_send_byte(1,'.');
lcd_send_byte(1,'=');
lcd_send_byte(1,')');
lcd_send_byte(1,' ');
void lcd_send_nibble(unsigned char data)
lcd.en = 0;
lcd.rw = 0;
delay_ms(2);
lcd.data = data;
delay_ms(2);
lcd.en = 1;
delay_ms(2);
lcd.en = 0;
delay_ms(2);
void lcd_send_byte(unsigned char address, unsigned char data)
lcd.rs = 0;
lcd.en = 0;
lcd.rw = 0;
LATB = 0;
lcd.rs = address;
lcd_send_nibble(data>>4);
delay_ms(10);
lcd_send_nibble(data);
delay_ms(10);
delay_ms(30000);
void delay_ms (unsigned int delay)
unsigned int x;
for (x = 0; x < delay; x++)
asm("nop");
APÉNDICE B
Diagrama esquemático del sistema
implementado (PCB)
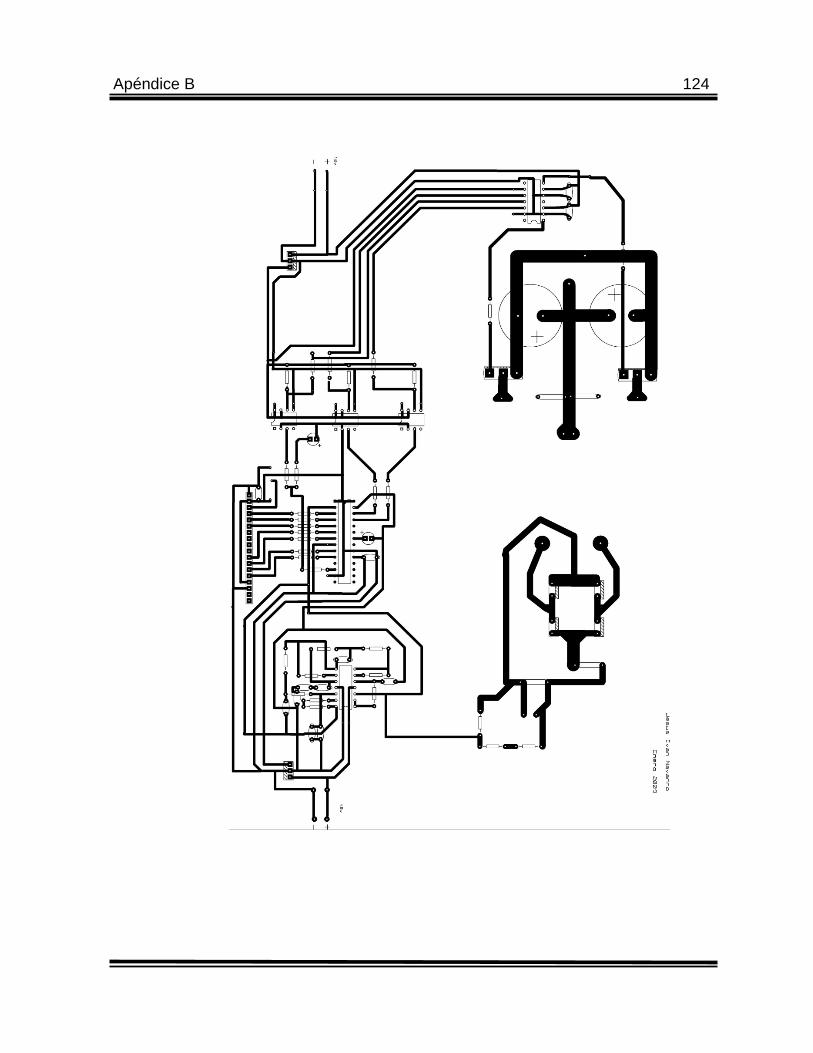
Apéndice B 124
APÉNDICE C
Coeficientes Filtro FIR
Apéndice C 126
La implementación del filtro FIR en el microcontrolador requiere de coeficientes ya
que necesita de estos parámetros para realizar un proceso de separación de la señal
de entrada obteniendo variaciones en la señal de salida, es decir, el valor de la
muestra actual y algunas muestras anteriores son multiplicados por coeficientes
definidos y al final todos los resultados de las multiplicaciones son sumados
obteniendo una salida para el instante actual.
Los coeficientes fueron calculados con el software MATLAB V. 7.0
El diseño del filtro FIR se realizo utilizando el método de ventanas, obteniendo los
coeficientes del filtro FIR a través de la función FIR1 en el software MATLAB.
La función es llamada introduciendo en el ambiente de trabajo la siguiente
instrucción:
),(1 WnNFIRB
En donde,
B = Contendrá los coeficientes de un filtro FIR pasabajas de orden N
1FIR = Función de diseño filtro FIR usando el método de la ventana.
N = Numero de coeficientes del filtro FIR.
Wn = Frecuencia de corte Wn , debe de estar entre 0 < Wn < 1.0.
El diseño del filtro FIR se da con las siguientes especificaciones: orden N = 10,
frecuencia de corte de 12.5 Hz y frecuencia de muestreo (Fs= 5000 Hz).
Se procede a obtener los coeficientes a través de la función FIR1 en el software
MATLAB. Sustituyendo valores:
),10(1 WnFIRB
En donde,
Wn = 005.
2
5000
5.12
2
Hzfs
fc
La siguiente figura muestra la función FIR1 y los coeficientes calculados de un filtro
pasabajas de orden 10.
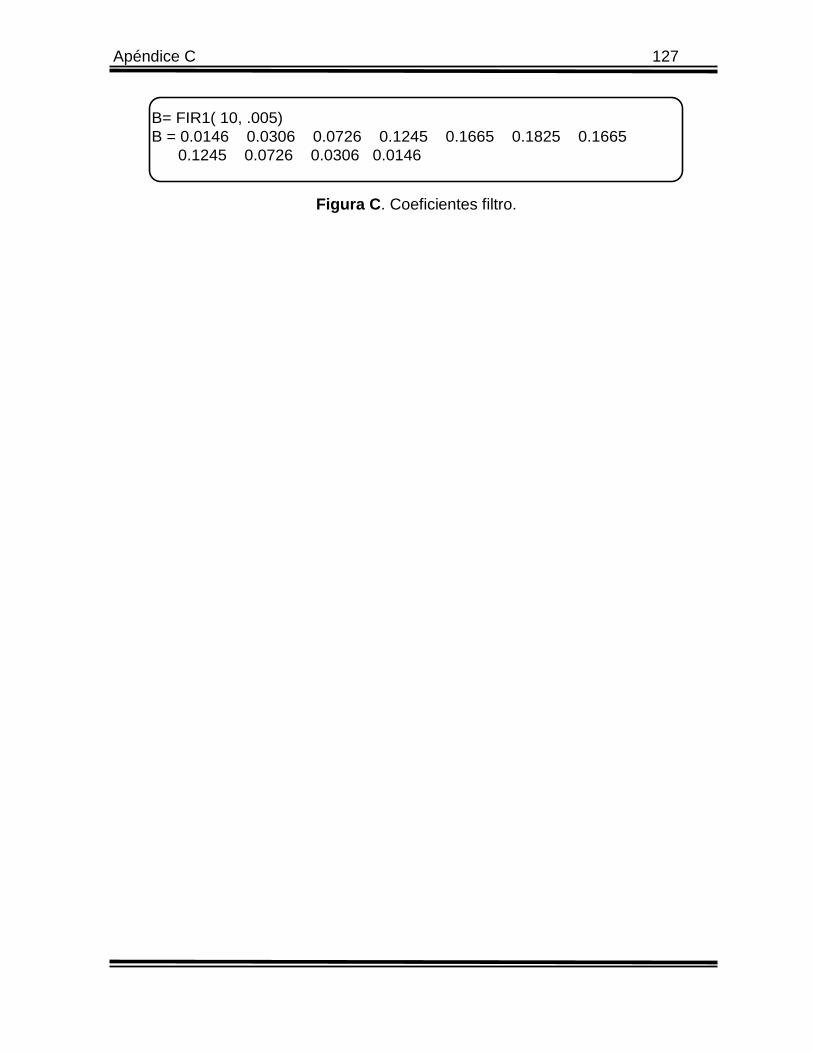
Apéndice C 127
B= FIR1( 10, .005)
B = 0.0146 0.0306 0.0726 0.1245 0.1665 0.1825 0.1665
0.1245 0.0726 0.0306 0.0146
Figura C. Coeficientes filtro.