sistem okendali tma is fungsi alih dan diagram · pdf fileekpansi dalam pecahan parsial,...
TRANSCRIPT
SISTEM KENDALI OTOMATIS
Fungsi Alih dan Diagram Blok
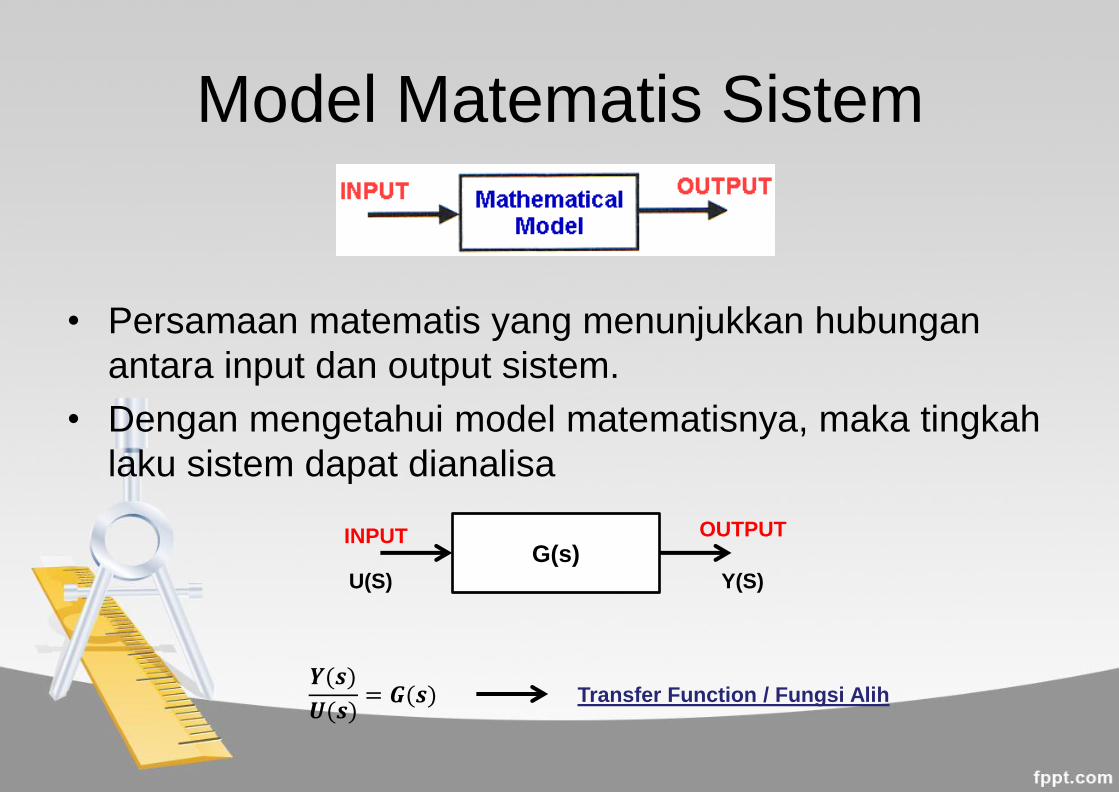
Model Matematis Sistem
• Persamaan matematis yang menunjukkan hubungan
antara input dan output sistem.
• Dengan mengetahui model matematisnya, maka tingkah
laku sistem dapat dianalisa
G(s) INPUT OUTPUT
U(S) Y(S)
𝒀(𝒔)
𝑼(𝒔)= 𝑮(𝒔) Transfer Function / Fungsi Alih
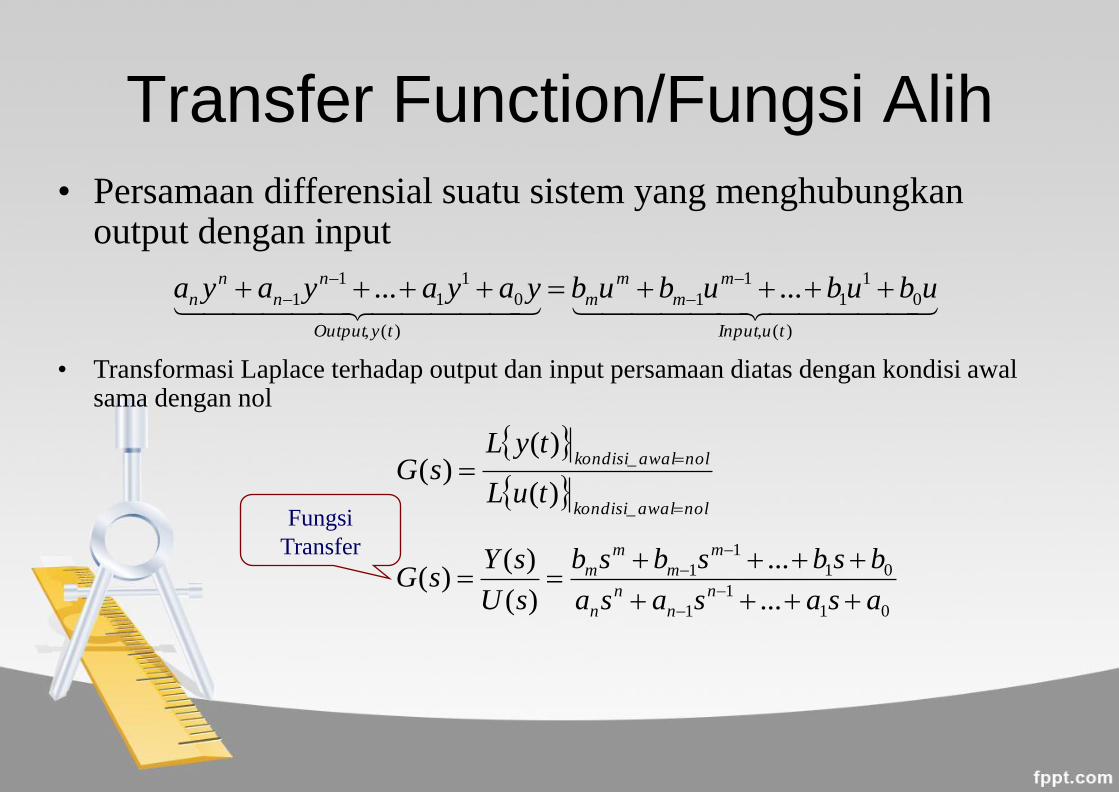
Transfer Function/Fungsi Alih
)(,
0
1
1
1
1
)(,
0
1
1
1
1 ......
tuInput
m
m
m
m
tyOutput
n
n
n
n ububububyayayaya
nolawalkondisi
nolawalkondisi
tuL
tyLsG
_
_
)(
)()(
• Persamaan differensial suatu sistem yang menghubungkan output dengan input
• Transformasi Laplace terhadap output dan input persamaan diatas dengan kondisi awal sama dengan nol
01
1
1
01
1
1
...
...
)(
)()(
asasasa
bsbsbsb
sU
sYsG
n
n
n
n
m
m
m
m
Fungsi
Transfer
4
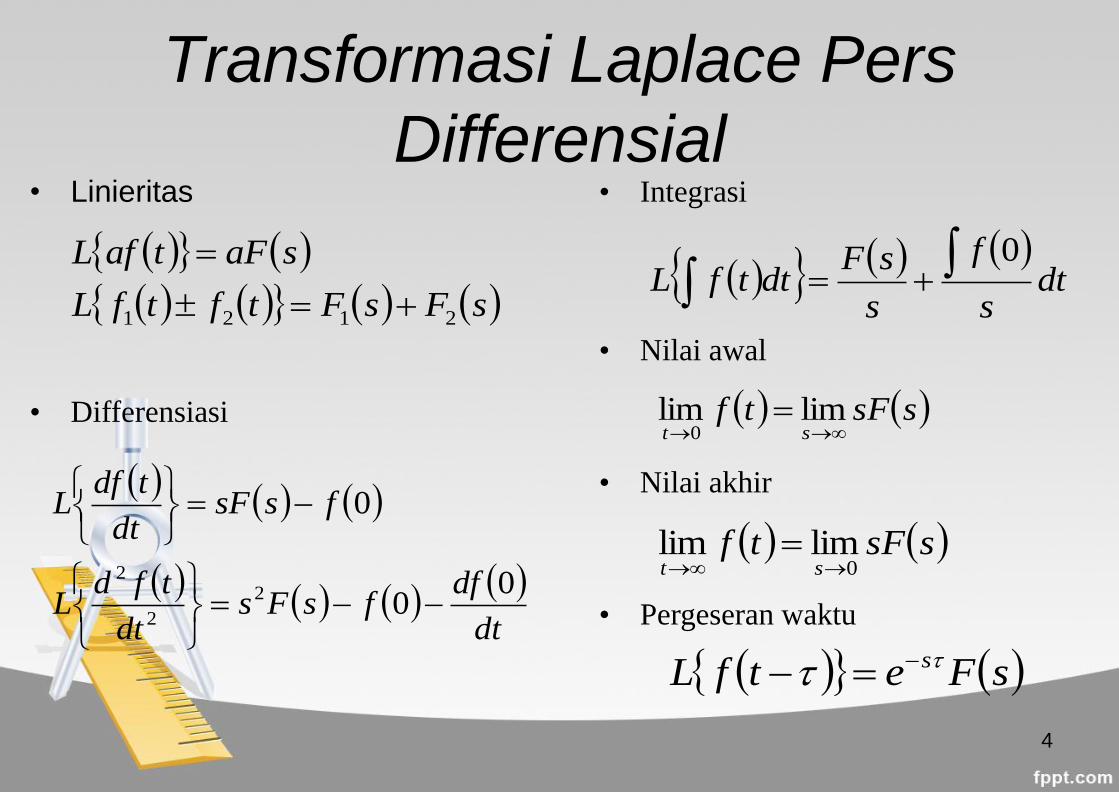
Transformasi Laplace Pers
Differensial • Linieritas
sFsFtftfL
saFtafL
2121
dt
dffsFs
dt
tfdL
fssFdt
tdfL
00
0
2
2
2
dt
s
f
s
sFdttfL
0
ssFtfst
limlim0
ssFtfst 0limlim
sFetfL s
• Differensiasi
• Integrasi
• Nilai awal
• Nilai akhir
• Pergeseran waktu
5
Contoh:
Solusi Persamaan Differensial
s
sYyssYysysYs1
5)(2)0(33)0´(02
tfty
dt
tdy
dt
tyd523
2
2
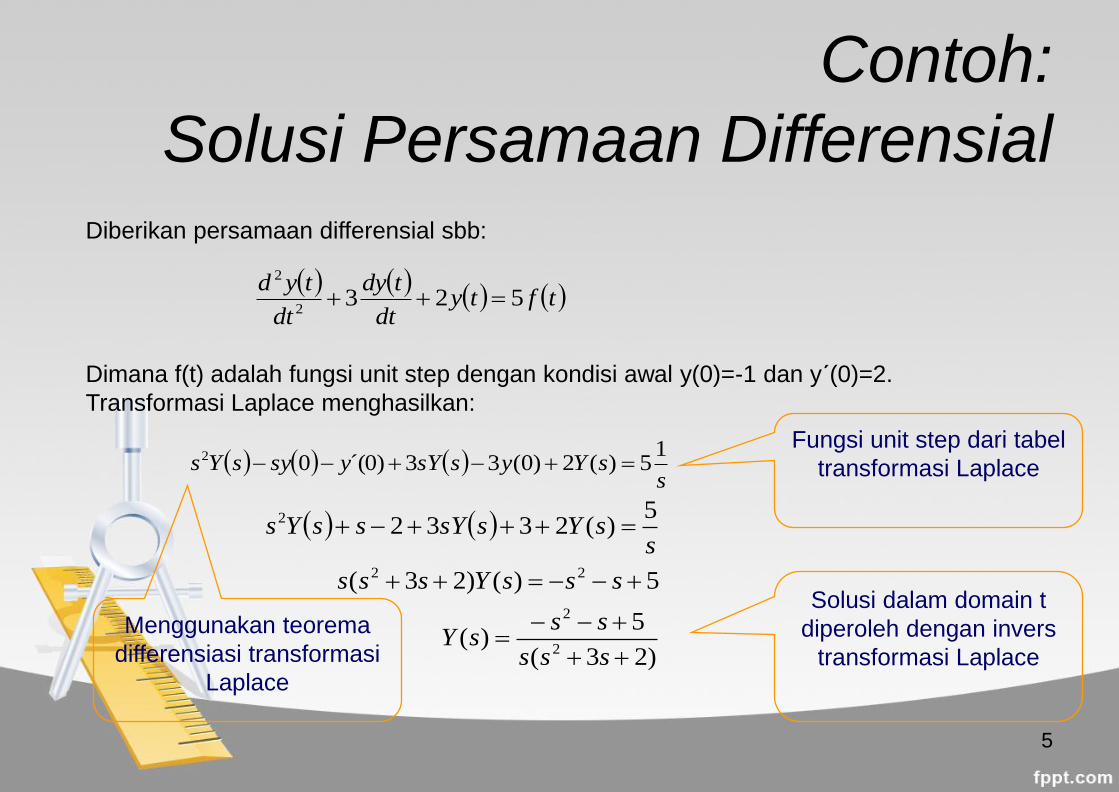
Diberikan persamaan differensial sbb:
Dimana f(t) adalah fungsi unit step dengan kondisi awal y(0)=-1 dan y´(0)=2.
Transformasi Laplace menghasilkan:
)23(
5)(
5)()23(
5)(2332
2
2
22
2
sss
sssY
sssYsss
ssYssYssYs
Fungsi unit step dari tabel
transformasi Laplace
Menggunakan teorema
differensiasi transformasi
Laplace
Solusi dalam domain t
diperoleh dengan invers
transformasi Laplace
6
)2)(1(
5
)23(
5)(
2
2
2
sss
ss
sss
sssY
2
3
)1(
5)]()2[(
5)2(
5)]()1[(
2
5
)2)(1(
5)]([
2
2
2
1
2
0
ss
sssYsC
ss
sssYsB
ss
ssssYA
s
s
s
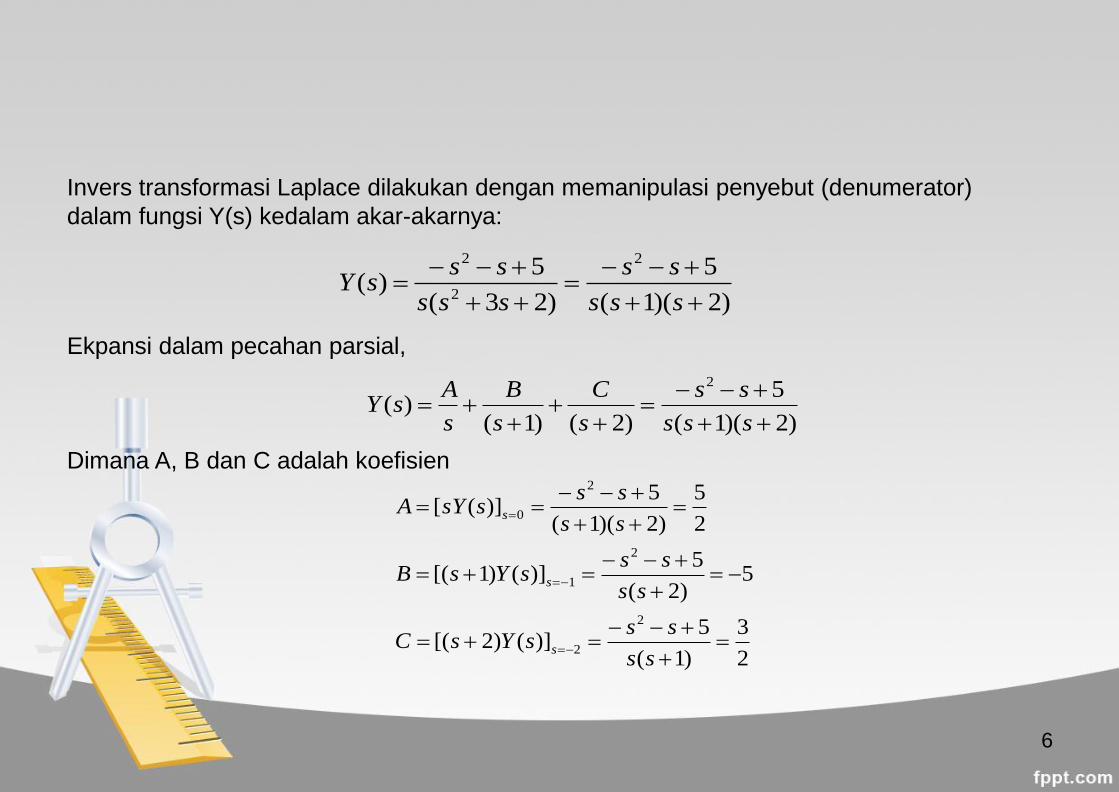
Invers transformasi Laplace dilakukan dengan memanipulasi penyebut (denumerator)
dalam fungsi Y(s) kedalam akar-akarnya:
)2)(1(
5
)2()1()(
2
sss
ss
s
C
s
B
s
AsY
Ekpansi dalam pecahan parsial,
Dimana A, B dan C adalah koefisien
7
)2(2
3
)1(
5
2
5)(
ssssY
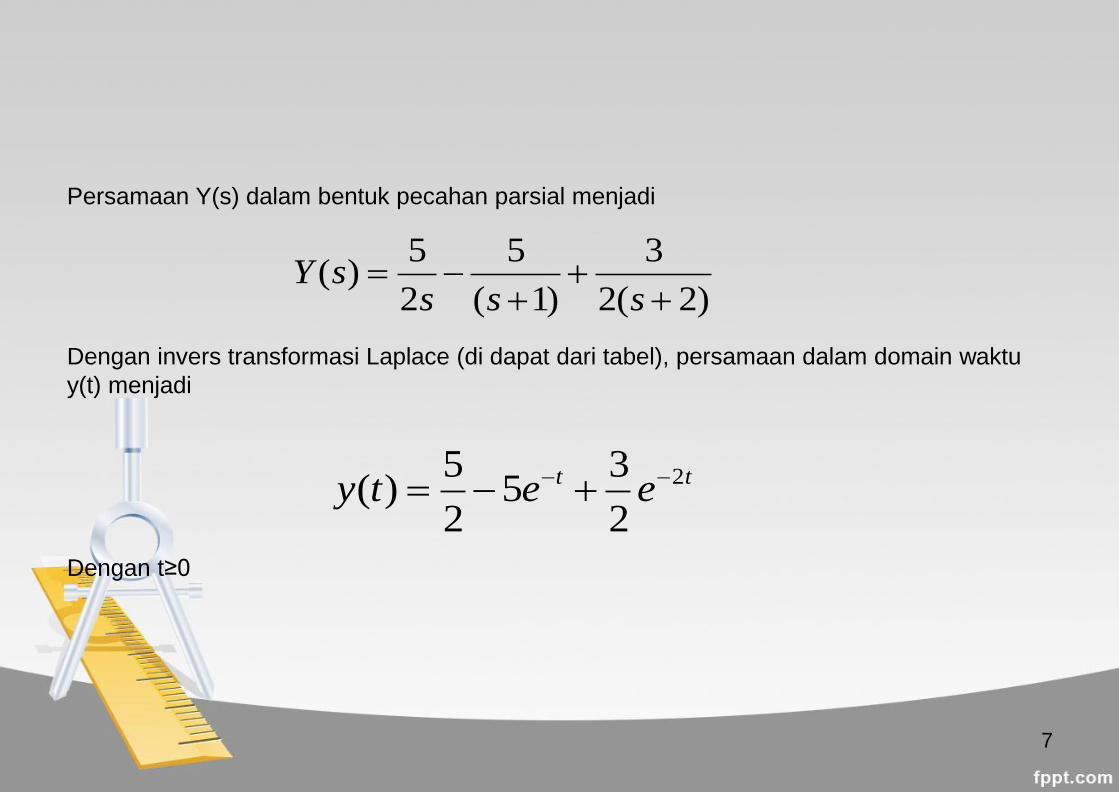
Persamaan Y(s) dalam bentuk pecahan parsial menjadi
Dengan invers transformasi Laplace (di dapat dari tabel), persamaan dalam domain waktu
y(t) menjadi
tt eety 2
2
35
2
5)(
Dengan t≥0
8
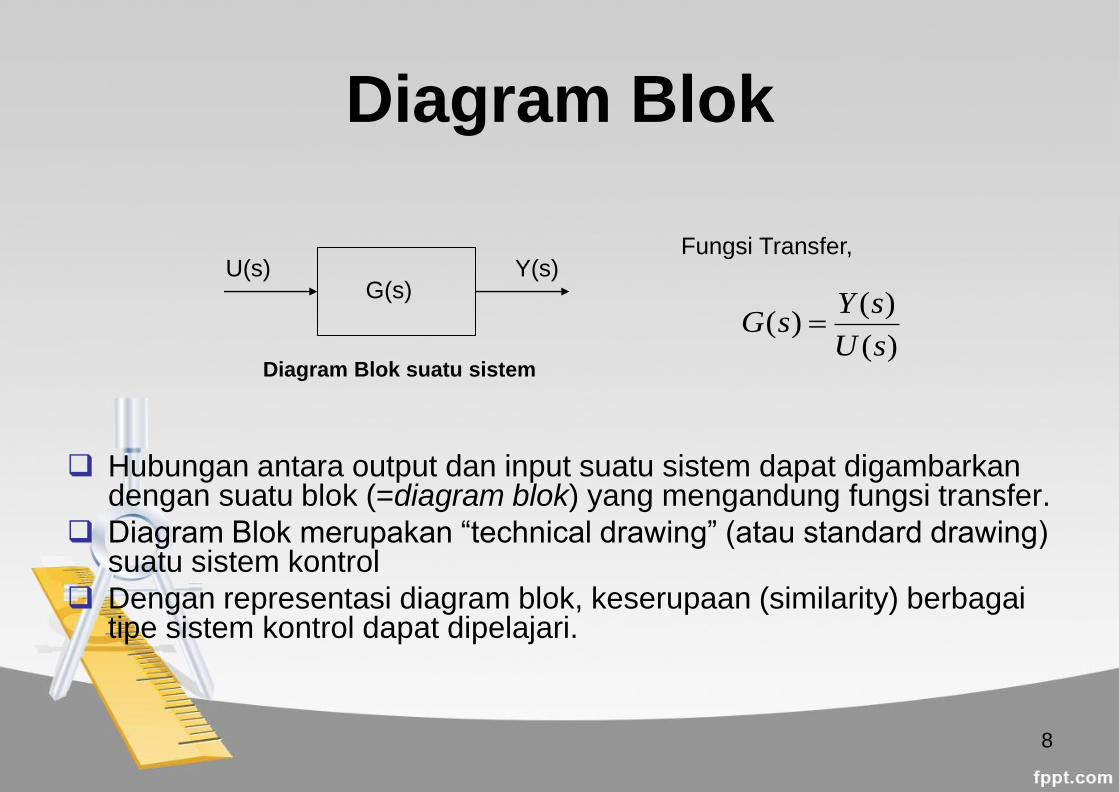
Diagram Blok
Hubungan antara output dan input suatu sistem dapat digambarkan dengan suatu blok (=diagram blok) yang mengandung fungsi transfer.
Diagram Blok merupakan “technical drawing” (atau standard drawing) suatu sistem kontrol
Dengan representasi diagram blok, keserupaan (similarity) berbagai tipe sistem kontrol dapat dipelajari.
G(s) U(s) Y(s)
)(
)()(
sU
sYsG
Fungsi Transfer,
Diagram Blok suatu sistem
9
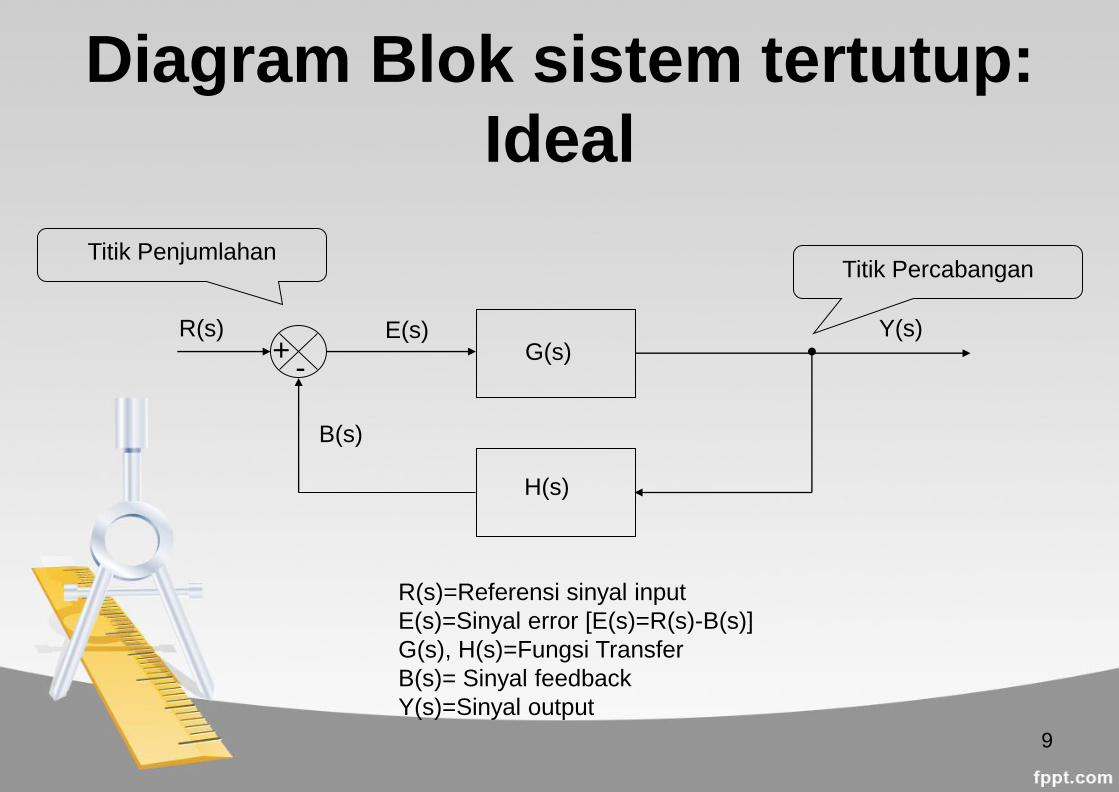
Diagram Blok sistem tertutup:
Ideal
G(s) E(s) Y(s)
- +
H(s)
R(s)
B(s)
Titik Penjumlahan Titik Percabangan
R(s)=Referensi sinyal input
E(s)=Sinyal error [E(s)=R(s)-B(s)]
G(s), H(s)=Fungsi Transfer
B(s)= Sinyal feedback
Y(s)=Sinyal output
10
)()(
)(sG
sE
sYFFTF
)()()(
)(sHsG
sE
sBOLTF
)()(1
)(
)(
)(
sHsG
sG
sR
sYCLTF
)()()(1
)()( sR
sHsG
sGsY
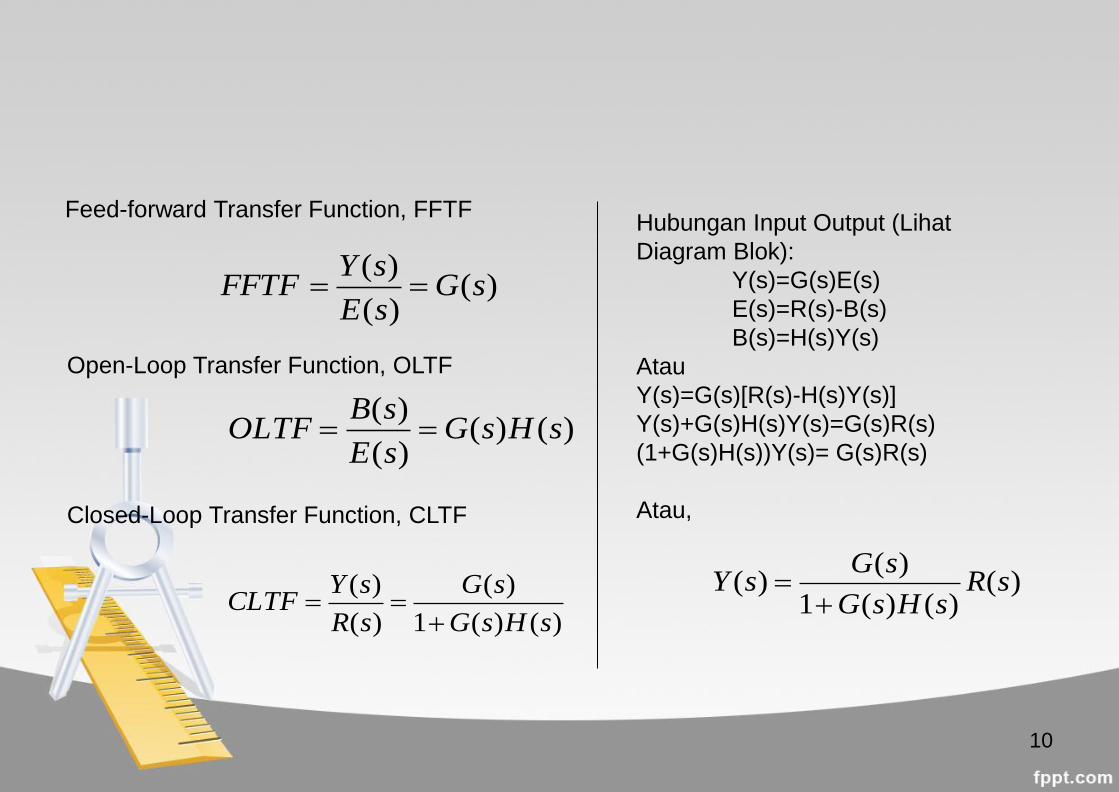
Feed-forward Transfer Function, FFTF
Open-Loop Transfer Function, OLTF
Closed-Loop Transfer Function, CLTF
Hubungan Input Output (Lihat
Diagram Blok):
Y(s)=G(s)E(s)
E(s)=R(s)-B(s)
B(s)=H(s)Y(s)
Atau
Y(s)=G(s)[R(s)-H(s)Y(s)]
Y(s)+G(s)H(s)Y(s)=G(s)R(s)
(1+G(s)H(s))Y(s)= G(s)R(s)
Atau,
Dr.-Ing. Mohamad Yamin 11
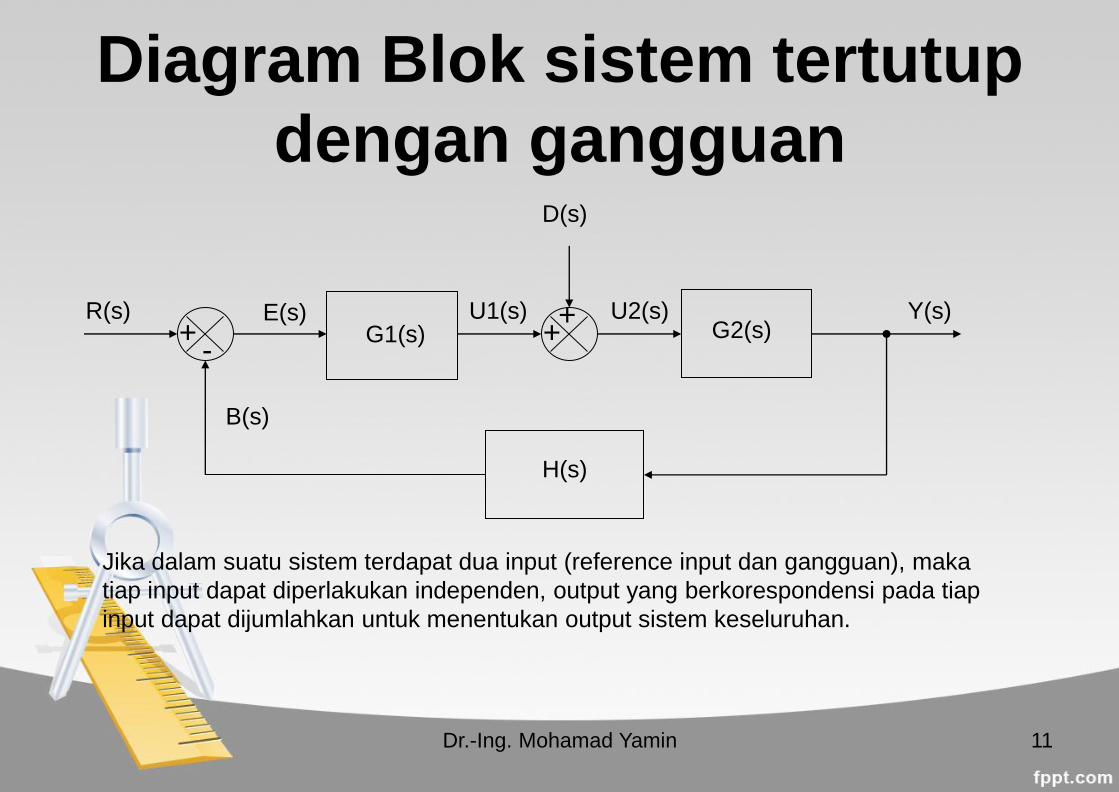
Diagram Blok sistem tertutup
dengan gangguan
G1(s) E(s) Y(s)
- +
H(s)
R(s)
B(s)
Jika dalam suatu sistem terdapat dua input (reference input dan gangguan), maka
tiap input dapat diperlakukan independen, output yang berkorespondensi pada tiap
input dapat dijumlahkan untuk menentukan output sistem keseluruhan.
+ +
D(s)
G2(s) U1(s) U2(s)
12
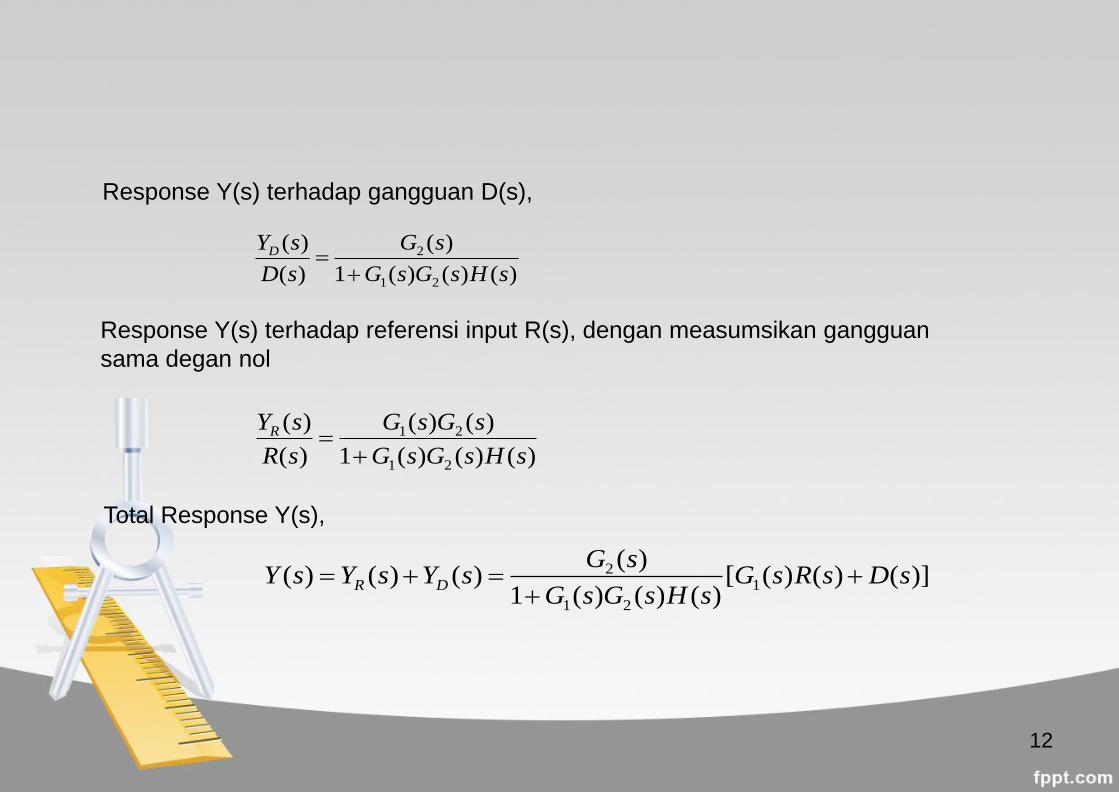
)()()(1
)(
)(
)(
21
2
sHsGsG
sG
sD
sYD
)()()(1
)()(
)(
)(
21
21
sHsGsG
sGsG
sR
sYR
)]()()([)()()(1
)()()()( 1
21
2 sDsRsGsHsGsG
sGsYsYsY DR
Response Y(s) terhadap gangguan D(s),
Response Y(s) terhadap referensi input R(s), dengan measumsikan gangguan
sama degan nol
Total Response Y(s),

• Buatlah Transfer Function-nya
• Gambarkan diagram blok

* Persamaan Sistem
idtC
eR
eei i
1 ; 0
0
* Transformasi Laplace dari persamaan
R
sEsEsI i )()()( 0 )(
1)(0 sI
CssE
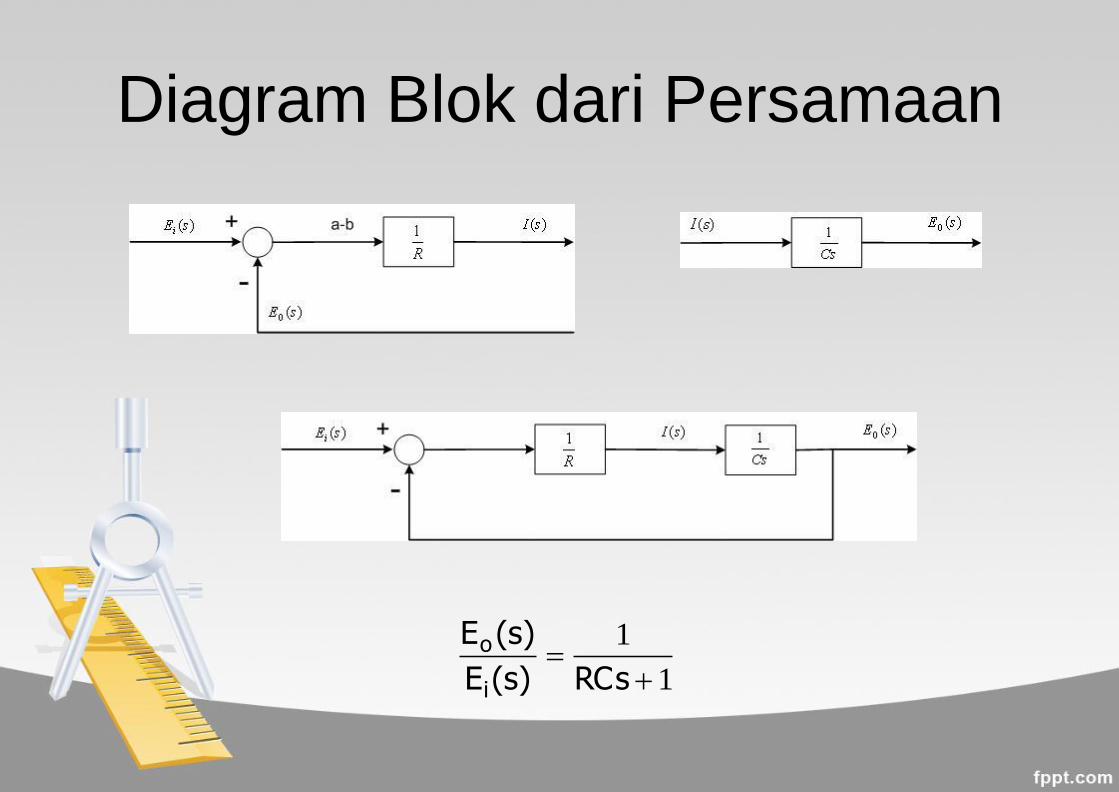
Diagram Blok dari Persamaan
1
1
RCs)s(E
)s(E
i
o
16
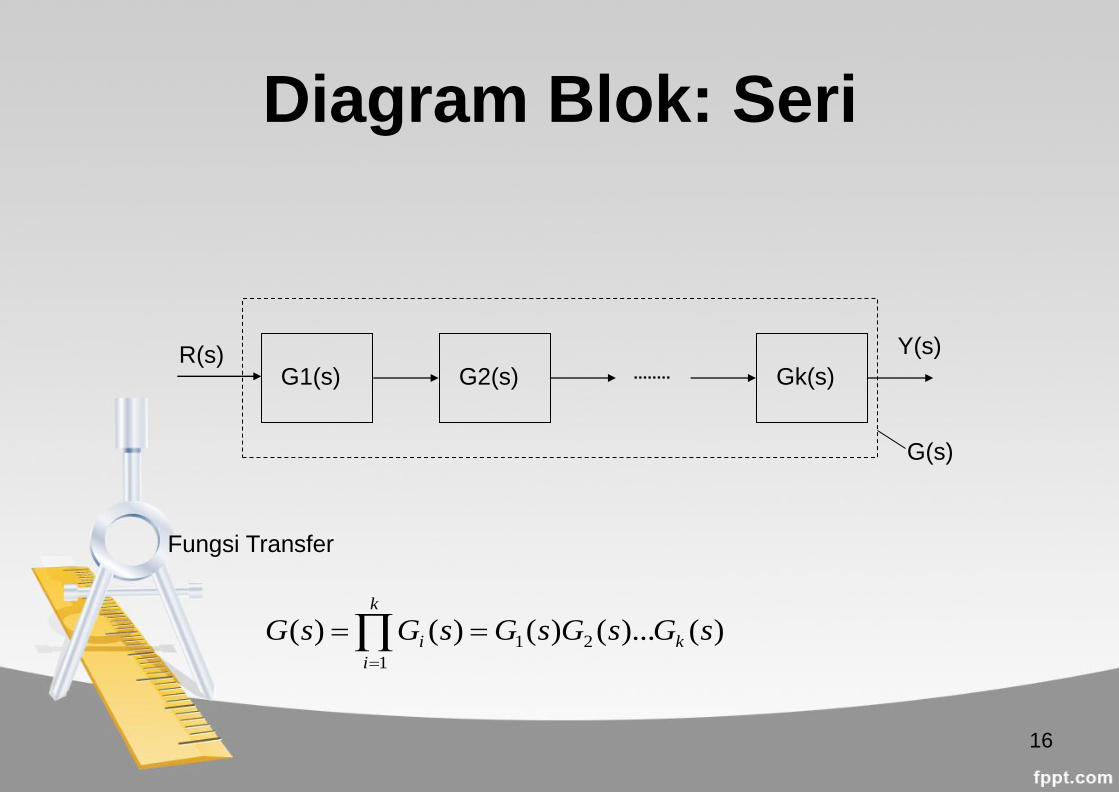
Diagram Blok: Seri
G1(s) R(s) Y(s)
G2(s) Gk(s)
G(s)
)()...()()()( 21
1
sGsGsGsGsG k
k
i
i
Fungsi Transfer

17
Paralel
R(s) Y(s) G2(s)
G(s)
)(...)()()()( 21
1
sGsGsGsGsG k
k
i
i
Fungsi Transfer hubungan paralel:
G1(s)
Gk(s)
+ +
+
18
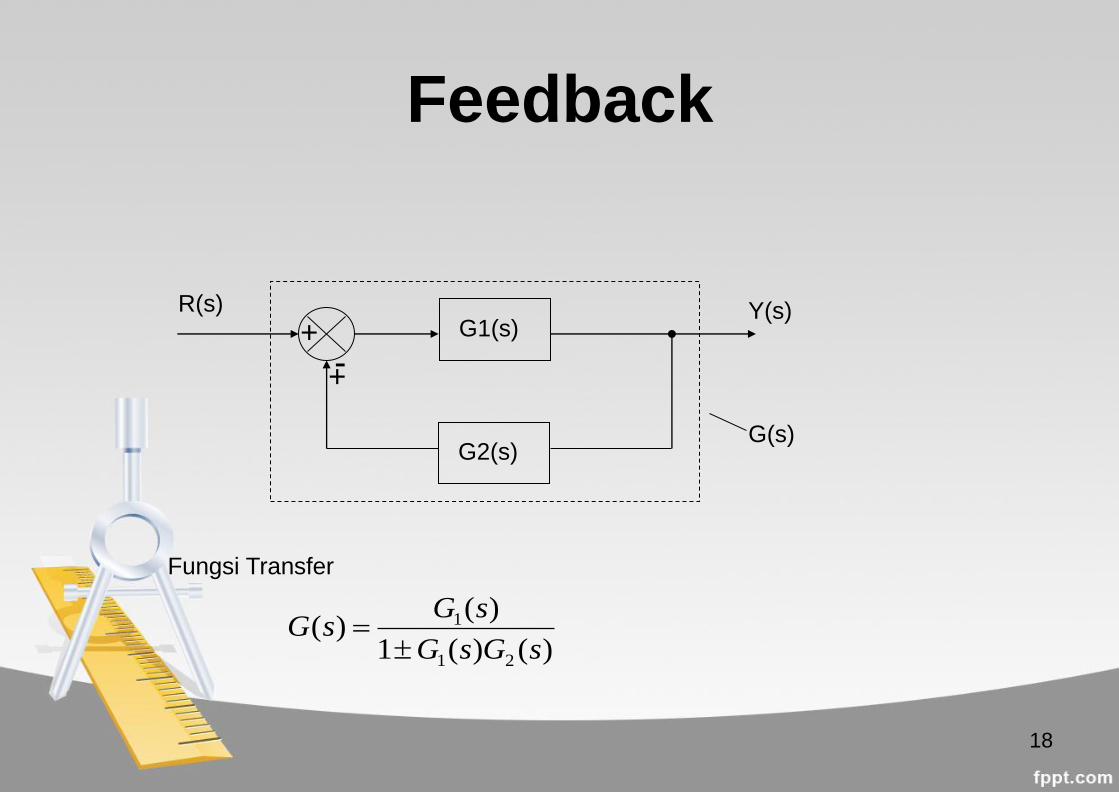
Feedback
R(s) Y(s) G1(s)
G(s)
)()(1
)()(
21
1
sGsG
sGsG
Fungsi Transfer
G2(s)
+
+ -
19
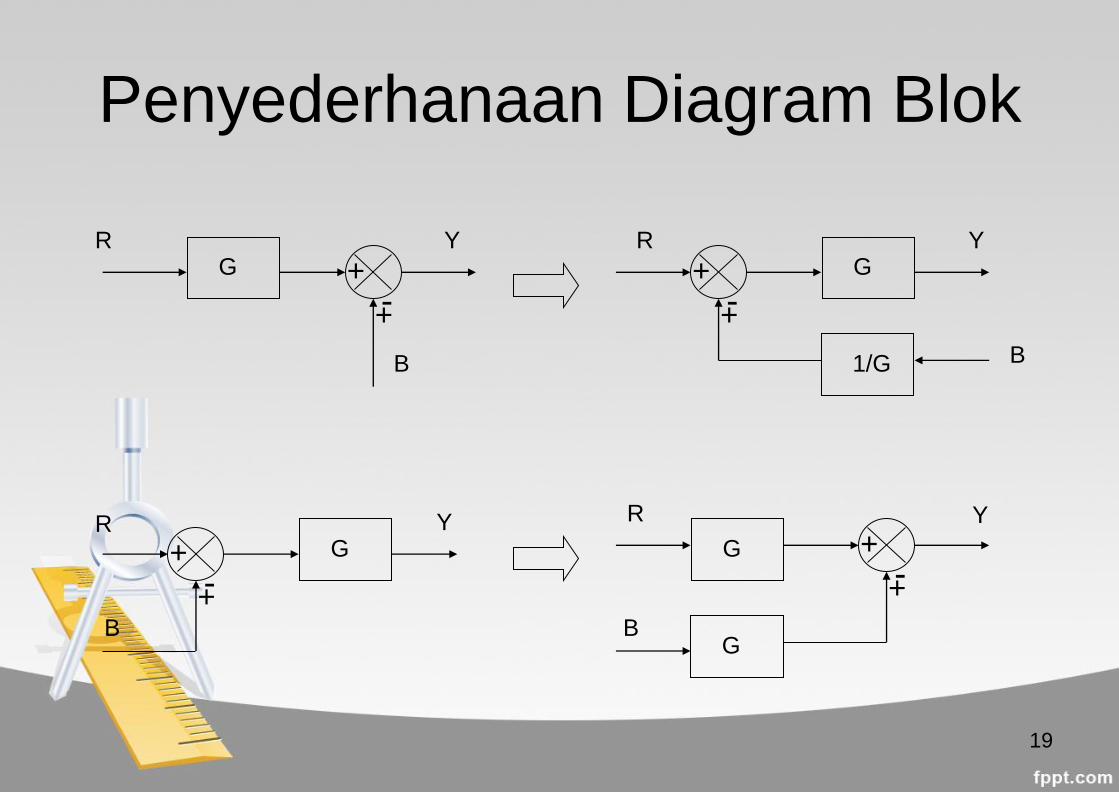
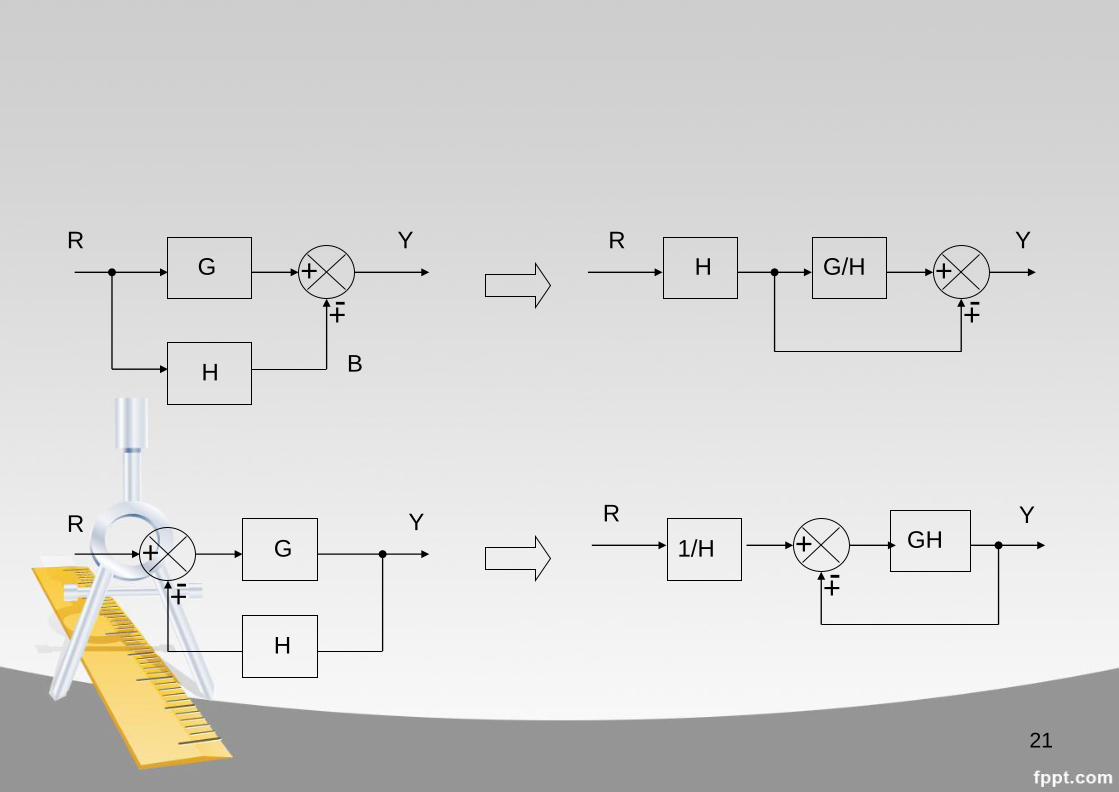
Penyederhanaan Diagram Blok
R G +
+ -
B
+
+ -
B
G
1/G
Y Y R
+
+ - B
Y R G G
G
+
+ -
R
B
Y

20
R G
B
Y
G
G
Y Y R
R
Y R G G
1/G
R
R
Y
21
R G +
+ -
B
+
+ - H
H
Y Y R
+
+ -
Y R G 1/H GH +
+ -
R Y
G/H
H
22
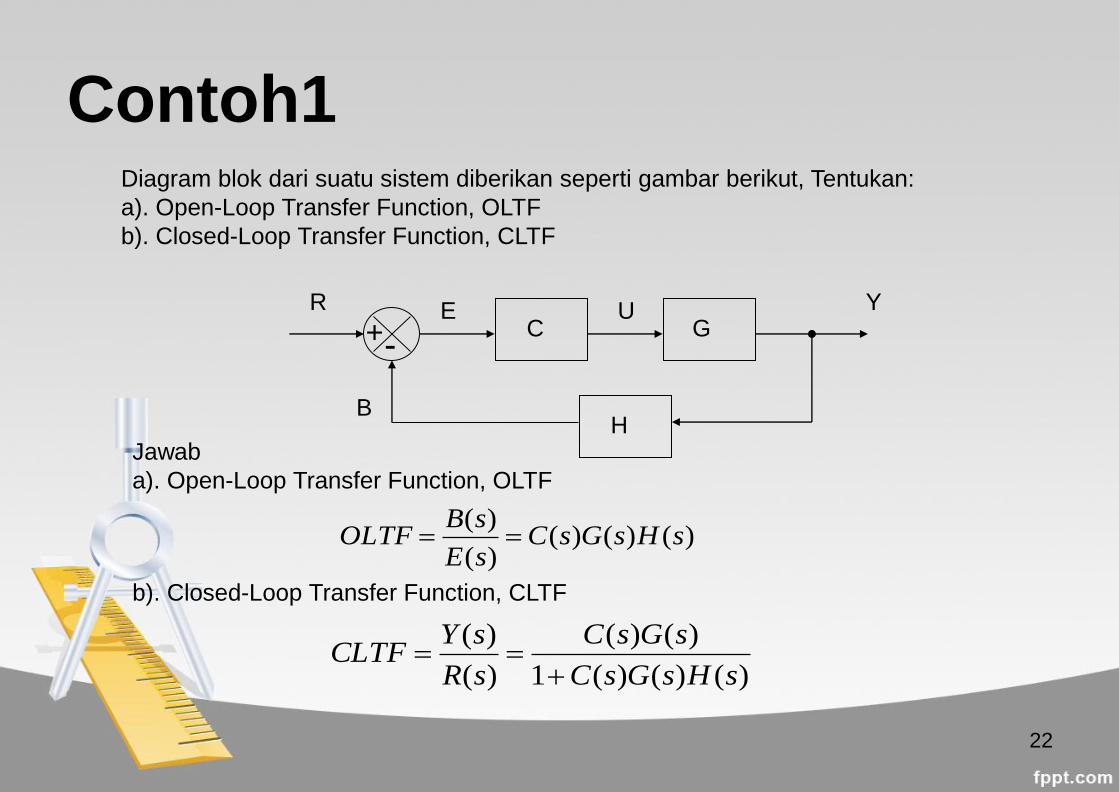
Contoh1
)()()()(
)(sHsGsC
sE
sBOLTF
+ - U
C
H
Y R
B
E G
Diagram blok dari suatu sistem diberikan seperti gambar berikut, Tentukan:
a). Open-Loop Transfer Function, OLTF
b). Closed-Loop Transfer Function, CLTF
Jawab
a). Open-Loop Transfer Function, OLTF
)()()(1
)()(
)(
)(
sHsGsC
sGsC
sR
sYCLTF
b). Closed-Loop Transfer Function, CLTF
23
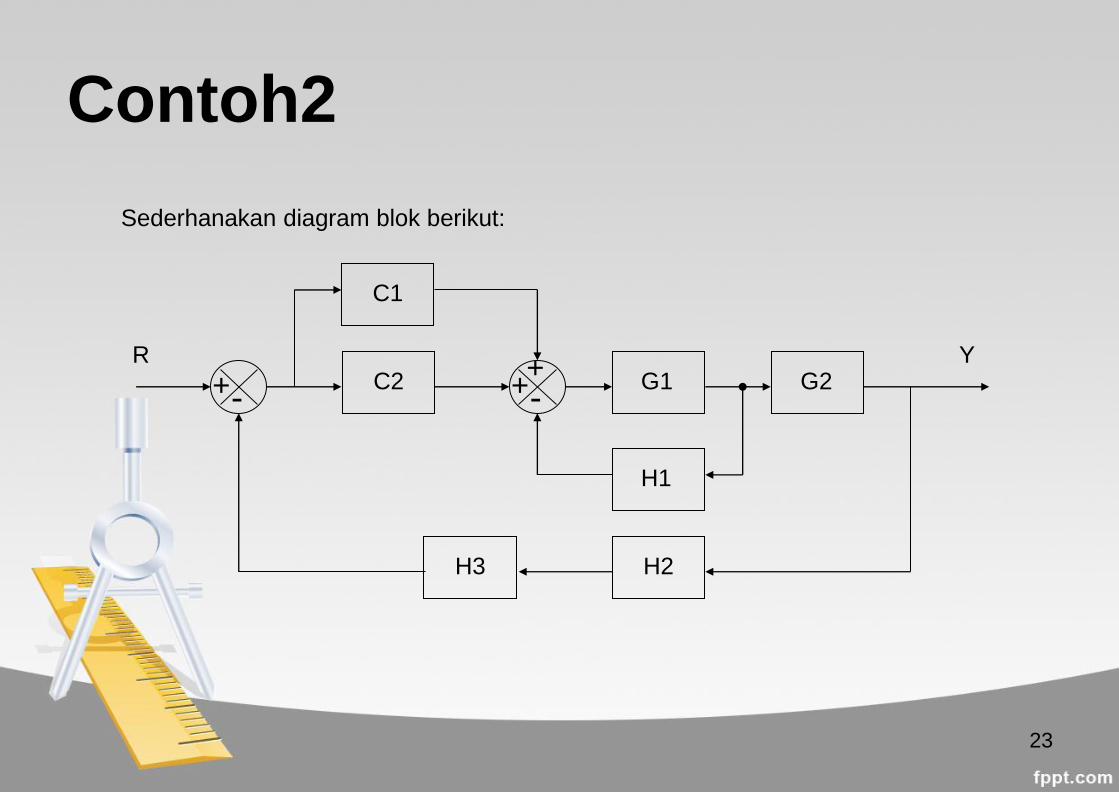
Contoh2
+ - C2
H3
Y R G1
Sederhanakan diagram blok berikut:
C1
+ -
H1
G2
H2
+
24
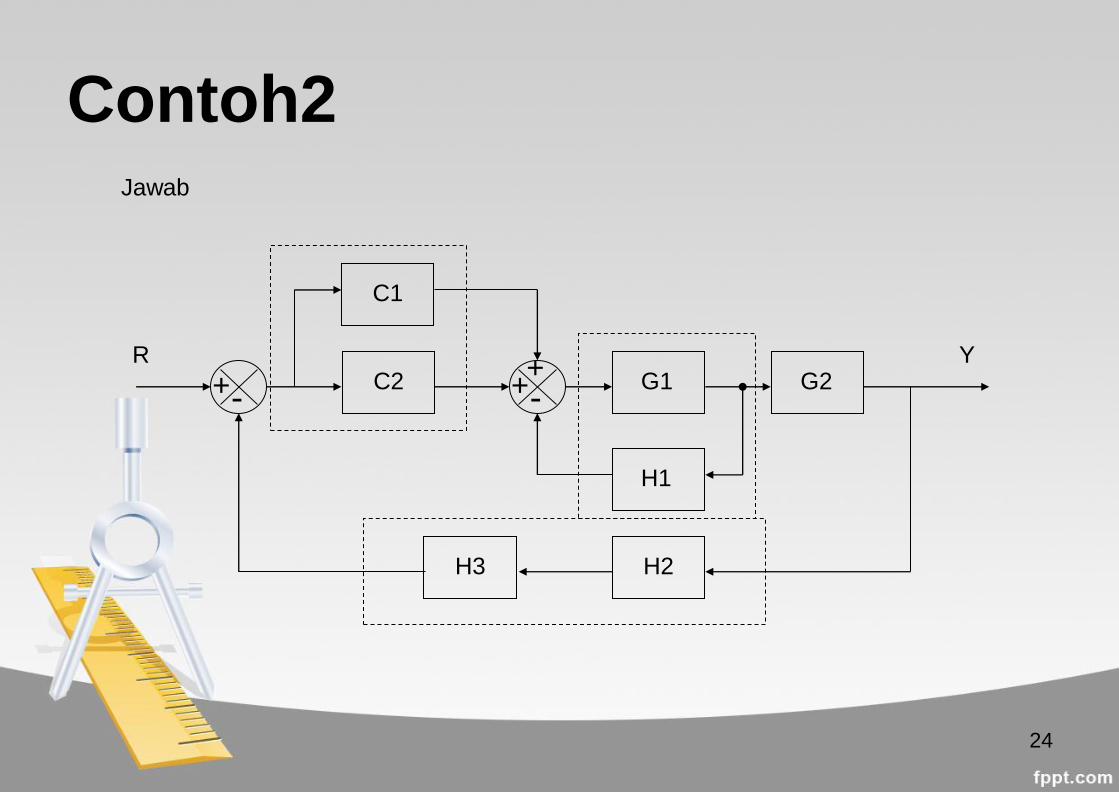
Contoh2
+ - C2
H3
Y R G1
Jawab
C1
+ -
H1
G2
H2
+
25
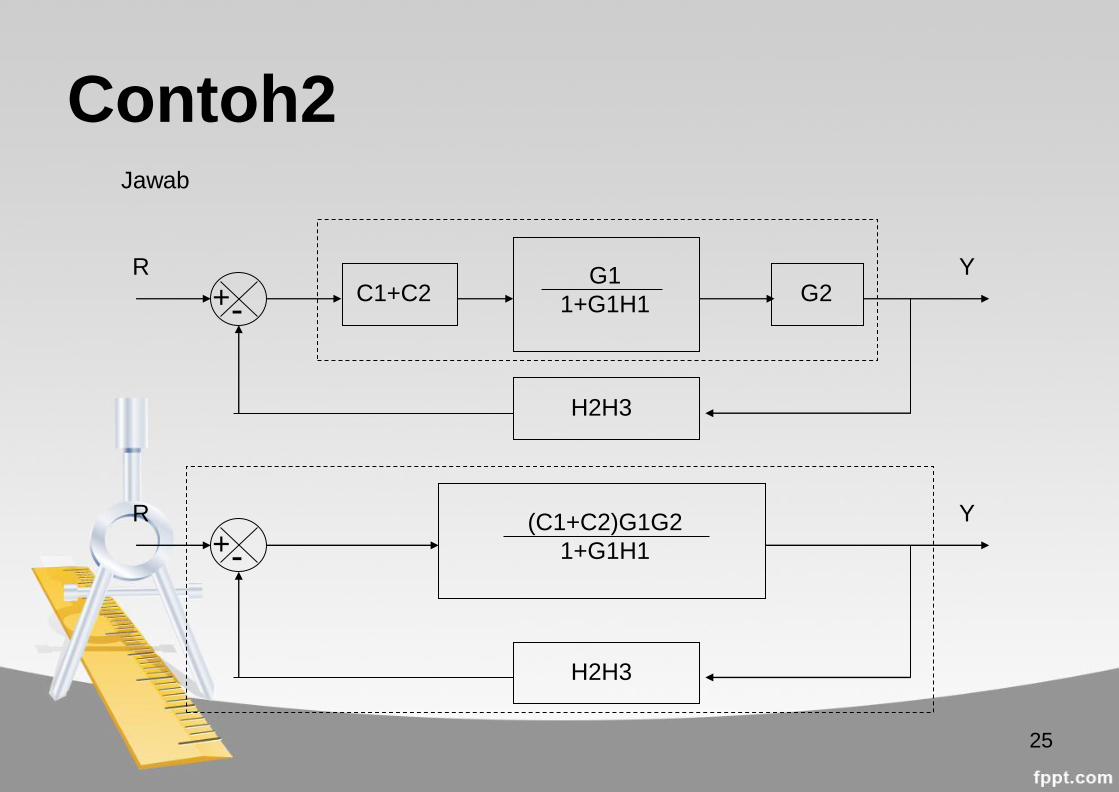
Contoh2
+ - C1+C2
H2H3
Y R G1
1+G1H1
Jawab
G2
+ -
H2H3
Y R (C1+C2)G1G2
1+G1H1

26
Contoh2
Diagram Blok yang disederhanakan menjadi:
Y R (C1+C2)G1G2
1+G1[H1+(C1+C2)G2H2H3]
1. Dari pernyataan berikut, manakah
pernyataan yang salah tentang transfer
function/fungsi alih dari sistem kendali
otomatis:
a. Digunakan untuk menganalisa karakteristik
dari perilaku sistem
b. Menunjukkan hubungan antara input dan
output dari sistem
c. Dinyatakan dalam bentuk fungsi waktu (t)
d. Merupakan transformasi laplace terhadap output
dan input persamaan differensial dari sistem
dengan kondisi awal sama dengan nol
1. Dari pernyataan berikut, manakah
pernyataan yang salah tentang transfer
function/fungsi alih dari sistem kendali
otomatis:
a. Digunakan untuk menganalisa karakteristik
dari perilaku sistem
b. Menunjukkan hubungan antara input dan
output dari sistem
c. Dinyatakan dalam bentuk fungsi waktu (t)
d. Merupakan transformasi laplace terhadap output
dan input persamaan differensial dari sistem
dengan kondisi awal sama dengan nol
2. Transformasi laplace dari dengan
kondisi awal sama dengan nol adalah
a. sF(s)-f(0)
b. sF(s)
c. sF(s)-
d. sF(0)
dt
tdf
dt
df 0
2. Transformasi laplace dari dengan
kondisi awal sama dengan nol adalah
a. sF(s)-f(0)
b. sF(s)
c. sF(s)-
d. sF(0)
dt
tdf
dt
df 0
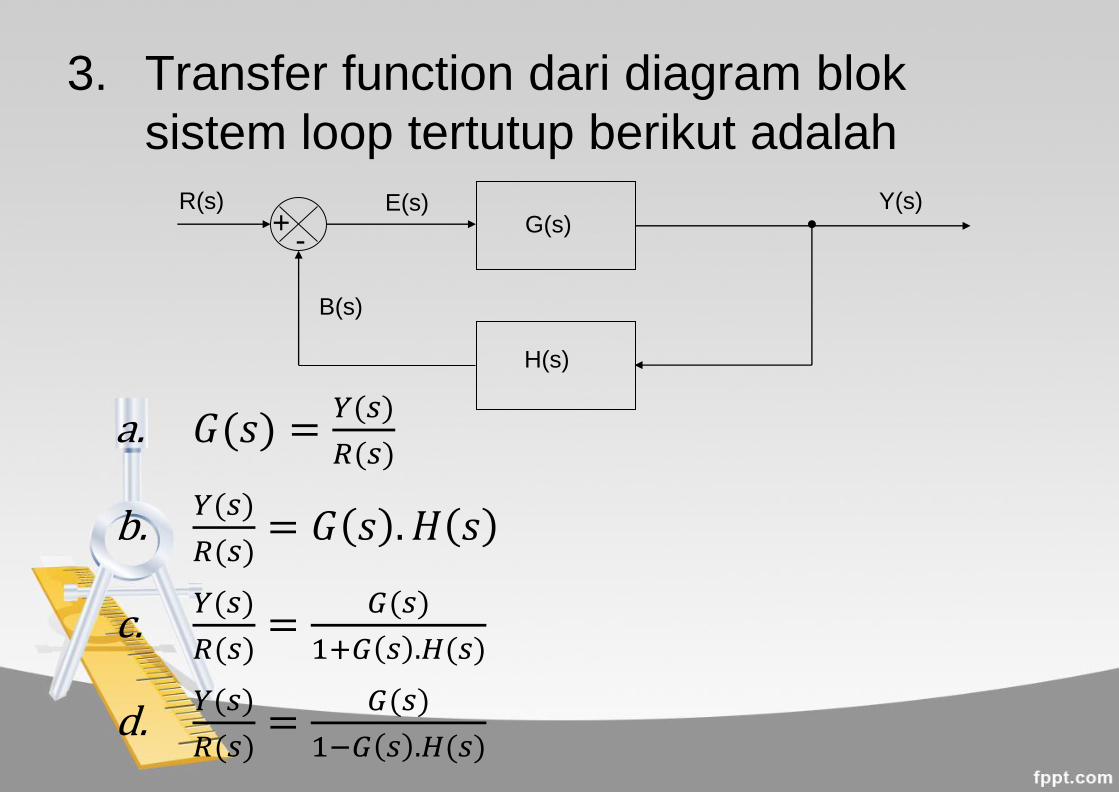
3. Transfer function dari diagram blok
sistem loop tertutup berikut adalah
a. 𝐺(𝑠) =𝑌(𝑠)
𝑅(𝑠)
b.𝑌(𝑠)
𝑅(𝑠)= 𝐺 𝑠 .𝐻 𝑠
c.𝑌(𝑠)
𝑅(𝑠)=
𝐺(𝑠)
1+𝐺 𝑠 .𝐻(𝑠)
d.𝑌(𝑠)
𝑅(𝑠)=
𝐺(𝑠)
1−𝐺 𝑠 .𝐻(𝑠)
G(s) E(s) Y(s)
- +
H(s)
R(s)
B(s)

3. Transfer function dari diagram blok
sistem loop tertutup berikut adalah
a. 𝐺(𝑠) =𝑌(𝑠)
𝑅(𝑠)
b.𝑌(𝑠)
𝑅(𝑠)= 𝐺 𝑠 .𝐻 𝑠
c.𝒀(𝒔)
𝑹(𝒔)=
𝑮(𝒔)
𝟏+𝑮 𝒔 .𝑯(𝒔)
d.𝑌(𝑠)
𝑅(𝑠)=
𝐺(𝑠)
1−𝐺 𝑠 .𝐻(𝑠)
G(s) E(s) Y(s)
- +
H(s)
R(s)
B(s)
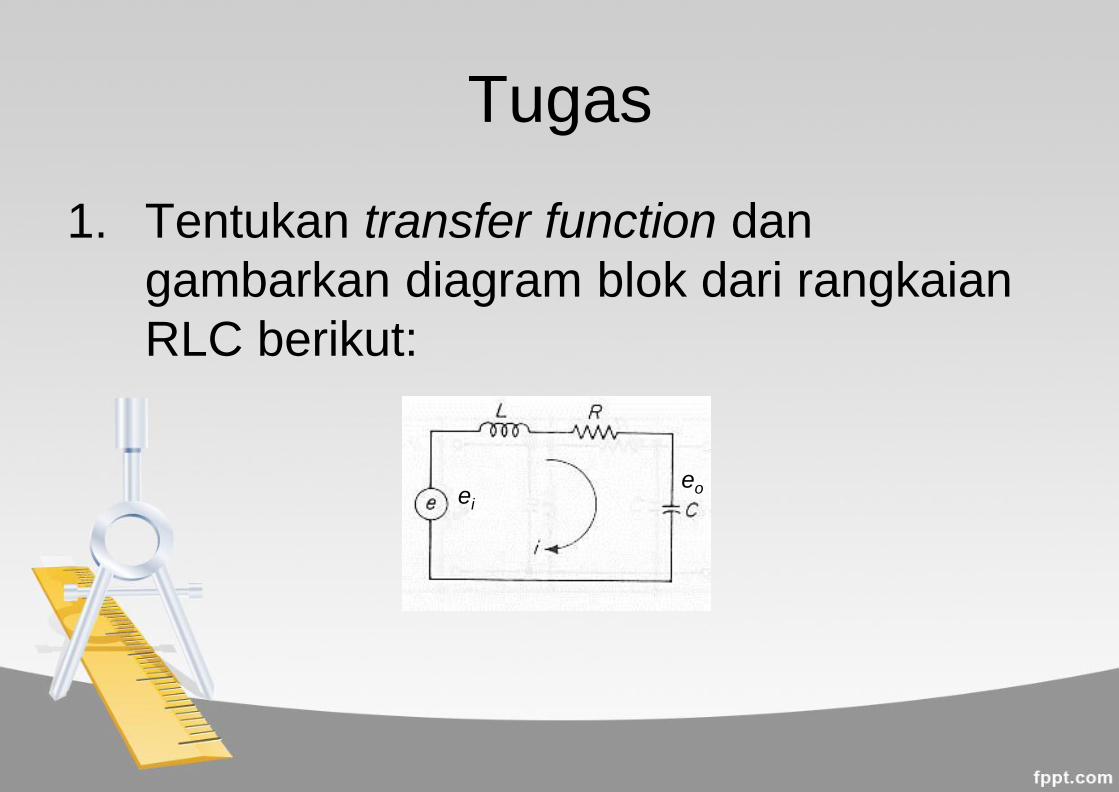
Tugas
1. Tentukan transfer function dan
gambarkan diagram blok dari rangkaian
RLC berikut:
ei
eo
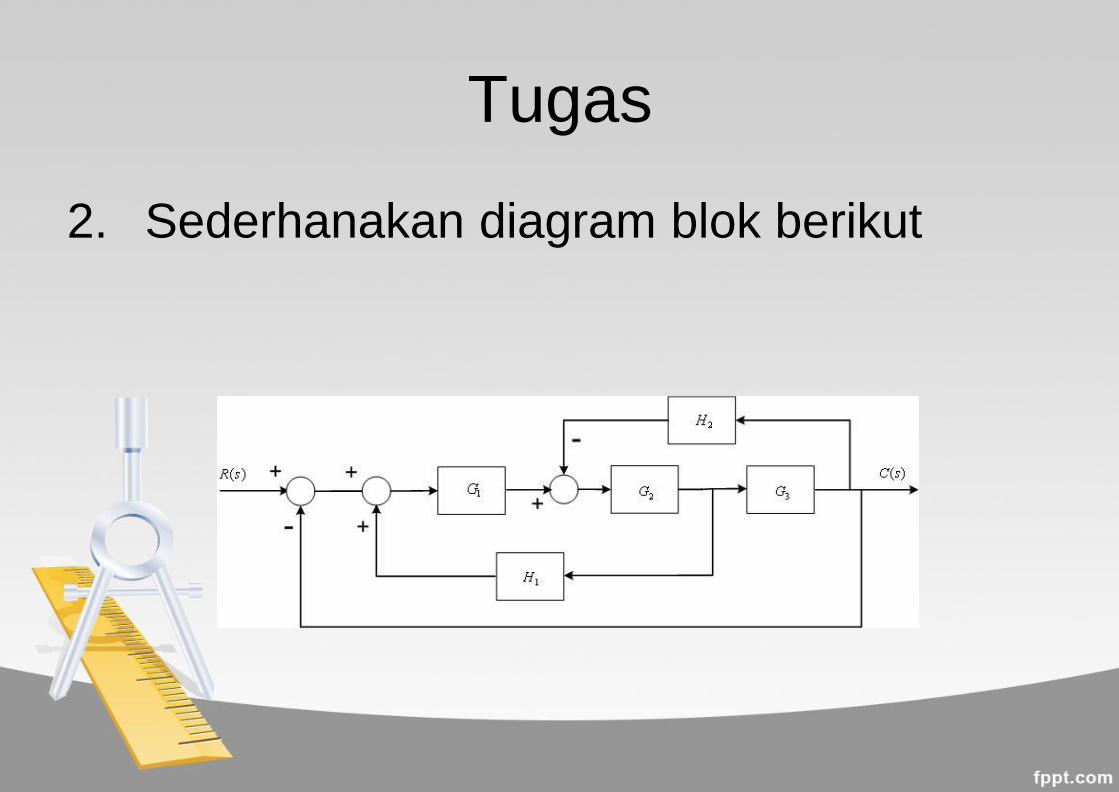
Tugas
2. Sederhanakan diagram blok berikut
TERIMA KASIH