resume survey rekayasa laut
TRANSCRIPT

RESUME SURVEY REKAYASA LAUT
Disusun Oleh :
Anggun Wara Rahajeng (08/268639/TK/33966)
JURUSAN TEKNIK GEODESI GEOMATIKA
FAKULTAS TEKNIK
UNIVERSITAS GADJAH MADA
YOGYAKARTA
2011
PENENTUAN POSISI SECARA AKUSTIK DI BAWAH AIR
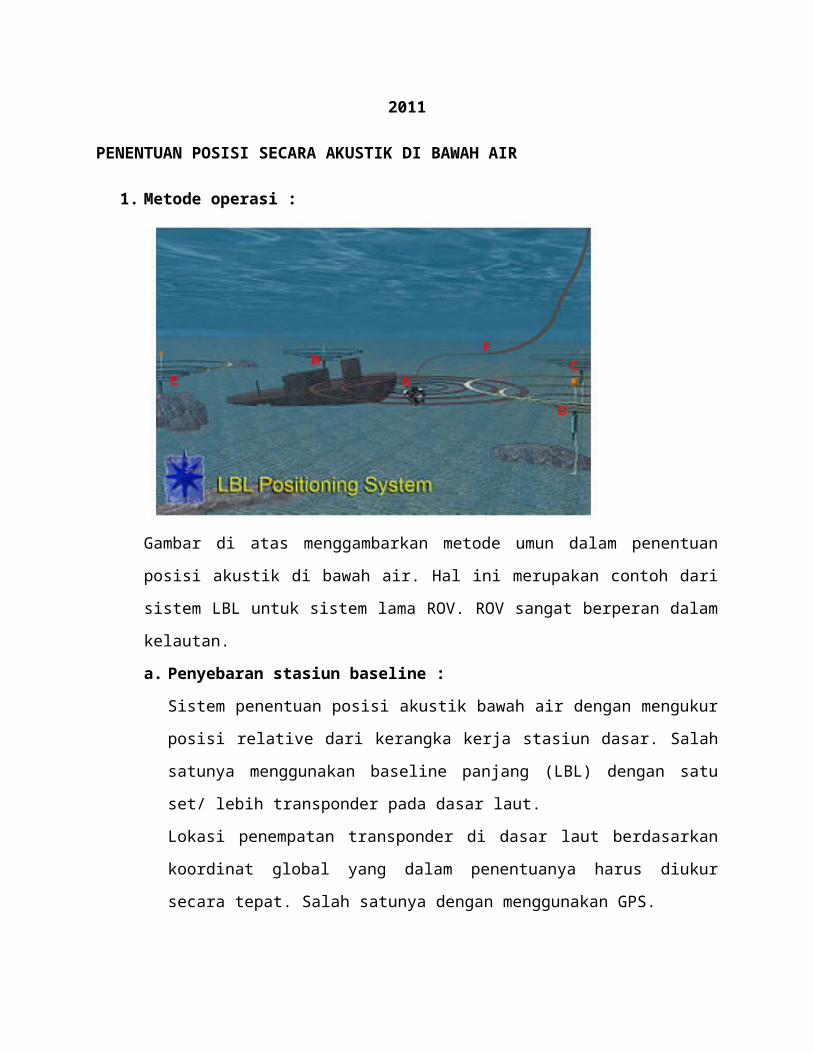
1. Metode operasi :
Gambar di atas menggambarkan metode umun dalam penentuan posisi akustik di bawah
air. Hal ini merupakan contoh dari sistem LBL untuk sistem lama ROV. ROV sangat
berperan dalam kelautan.
a. Penyebaran stasiun baseline :
Sistem penentuan posisi akustik bawah air dengan mengukur posisi relative dari
kerangka kerja stasiun dasar. Salah satunya menggunakan baseline panjang (LBL)
dengan satu set/ lebih transponder pada dasar laut.
Lokasi penempatan transponder di dasar laut berdasarkan koordinat global yang
dalam penentuanya harus diukur secara tepat. Salah satunya dengan menggunakan
GPS.
Transponder ini dipasang di dasar laut dan dapat memancarkan sinyal setelah
menerima sinyal command namun setelah itu transponder akan menjadi pasif unutk
menghemat power.
b. Operasi navigasi
Setelah penentuan baseline dan survey maka selanjutnya adalah positioning unutk
operasi. Pada contoh gambar di atas pada baseline panjang (LBL) sebuah interrogator
(A) dipasang pada ROV yang akan dilacak. Integrator mentransmisikan sinyal akustik

yang diterima oleh transponder. Pengukuran jarak akustik dapat ditambah oleh data
sensor kedalaman unutk mendapatkan akurasi posisi yang lebih baik. Penentuan
posisi akustik bawah air dapat menghasilkan akurasi sebesar centimeter hingga
puluhan meter dan dapat digunakan selama operasi dari jarak puluhan meter hingga
kilometer.
2. Sistem penentuan posisi akustik bawah air umumnya dikategorikan menajdi
beberapa kelas :
a. Sistem panjang baseline/long baseline (LBL)
Sistem dasar panjang di dasar laut yang menggunakan jaringan transponder.
Transponder biasanya dipasang pada sudut-sudut dasar laut. Sistem LBL
mengahasilkan akurasi yang tinggi yang umumnya lebih dari 1m bahkan sampai 0.01
m. jarak hasil dalam geometri ideal untuk perhitungan posisi. Selain itu sistem LBL
beroperasi tanpa jalur akustik ke permukaan laut. LBL digunakan sebagai penentuan
titik acuan awal untuk navigasi.
b. USBL (Ultra Short Baseline) atau lebih dikenal dengan sistem Ultra baseline
pendek.
Sistem ini terkait dengan super SSBL) yang bergantung pada array
hydrophone yang tersusun secara coplanar dengan jarak 5 – 20 m. transducer yang
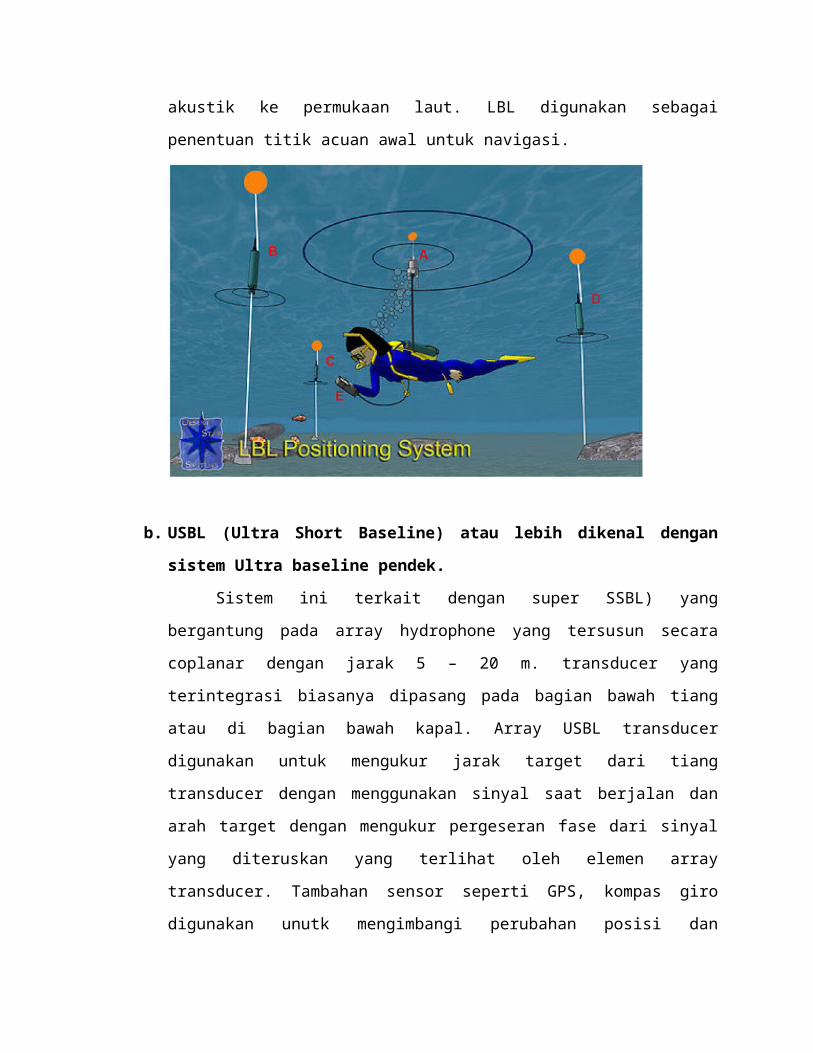
terintegrasi biasanya dipasang pada bagian bawah tiang atau di bagian bawah kapal.
Array USBL transducer digunakan untuk mengukur jarak target dari tiang transducer
dengan menggunakan sinyal saat berjalan dan arah target dengan mengukur
pergeseran fase dari sinyal yang diteruskan yang terlihat oleh elemen array
transducer. Tambahan sensor seperti GPS, kompas giro digunakan unutk
mengimbangi perubahan posisi dan orientasi dari permukaan kapal dan tiang
transducernya. Kelemahanya adalah akurasi positioning dan ketahan tidak baik untuk
sistem LBL.
USBL yang lengkap terdiri dari sebuah transceiver yang dipasang di bawah
tiang kapal dan transponder/responder di dasar laut, towfish atau pada ROV. Sebuah
computer yang digunakn unutk menghitung posisi dari rentang yang diukur dengan
transceiver. Pulsa akustik ditularkan oleh transceiver dan dideteksi atau ditangkap
oleh transponder di bawah laut. Kemudian pulsa akustik kembali terdeteksi oleh
transceiver kapal. Waktu dari tranmisi dari pulsa akustik awal sampai terdeteksi
diukur oleh sistem USBL dan diubah menjadi kisaran.
Unutk menghitung posisi bawah lau, USBL menghitung rentang dan sudut
dari transceiver ke mercusuar bawah laut. Sudut yang diukur berisi array tranducer.
Sebuah metode yang disebut “fase-diferencing” dalam array transducer digunakan
unutk menghitung sudut transponder bawah laut.
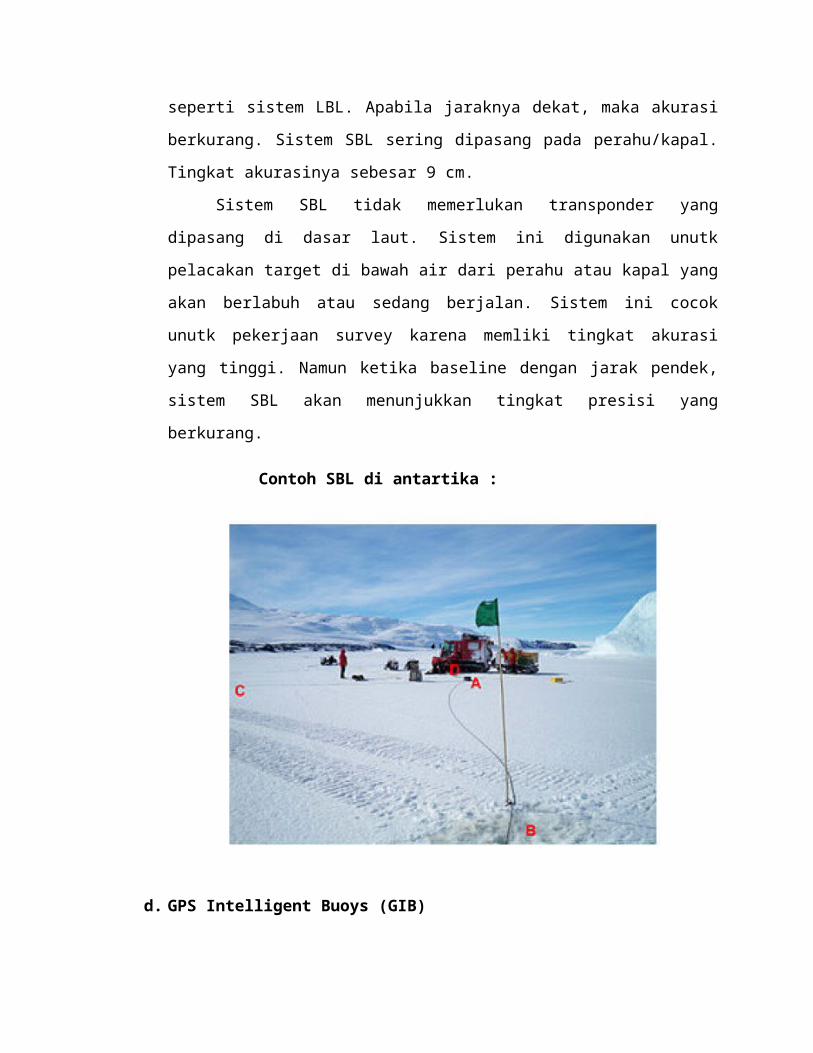
c. Baseline pendek / sistem (SBL)
Pada sistem ini menggunakan acuan dasar yang terdiri dari tiga atau lebih
transducer sonar yang dihubungkan dengan kawat ke pusat kotak control. Akurasi
tergantung pada jarak transducer dan metode pemasanganya. Ketika jarak yang
digunakan lebih luas, proses kerjanya mirip seperti sistem LBL. Apabila jaraknya
dekat, maka akurasi berkurang. Sistem SBL sering dipasang pada perahu/kapal.
Tingkat akurasinya sebesar 9 cm.
Sistem SBL tidak memerlukan transponder yang dipasang di dasar laut.
Sistem ini digunakan unutk pelacakan target di bawah air dari perahu atau kapal yang
akan berlabuh atau sedang berjalan. Sistem ini cocok unutk pekerjaan survey karena

memliki tingkat akurasi yang tinggi. Namun ketika baseline dengan jarak pendek,
sistem SBL akan menunjukkan tingkat presisi yang berkurang.
Contoh SBL di antartika :
d. GPS Intelligent Buoys (GIB)
Pada sistem ini, posisi dihitung secara realtime pada permukaan ToA( Time of
Arrival) dari sinyal akustik bawah air yang dikirim oleh Devic dari pelampung.
Konfigurasi keduanya cepat dan kalibrasinya bebas. Tingkat akurasi mirip dengan
sistem LBL. Yang membedakan adalah sistem ini menggunakan satu arah sinyal
akustik dari emitor ke pelampung. Kegunaan sistem GiB ini adalah untuk melacak
AUV’s torpedo, atau penyelam selain itu digunakan untuk melokalisasi kotak hitam
pesawat terbang, untuk menentukan dampak koordinat inert dan sebagainya.
GIB’s digunakan dalam hubunganya dengan perangkat bawah air aktif
(seperti pinger dilengkapi dengan torpedo) atau dengan suara pasif sumber akustik
(misalnya bom lambam yang mencolok di permukaan air). Biasanya sumber suara
dilacak menggunakan teknik TOA. Posisi GPs dapat digunakan unutk posisi array
GIB;s dengan akurasi centimeter dalam tingkat realtime.
Contoh :