program kreativitas mahasiswakemahasiswaan.dinamika.ac.id/wp-content/uploads/2013/10/pkm-p... ·...
TRANSCRIPT

PROGRAM KREATIVITAS MAHASISWA
JUDUL PROGRAM
MODIFIKASI PERGERAKAN MOBILE ROBOT MENGGUNAKAN
SENSOR GARIS DAN ODOMETRY
BIDANG KEGIATAN
PKM-P
Diusulkan Oleh:
10.41020.0035 Toto Alfian Wahyuono Tahun Angkatan 2010
09.41010.0221 Adisti Machmudah Tahun Angkatan 2009
10.41020.0105 Lukman Hakim Suryaselaksa Tahun Angkatan 2010
SEKOLAH TINGGI MANAJEMEN INFORMATIKA & KOMPUTER
SURABAYA
2012

i
HALAMAN PENGESAHAN
1. Judul Kegiatan : Modifikasi Pergerakan Mobile Robot Menggunakan
Sensor Garis dan Odometry
2. Bidang Kegiatan : (X) PKMP ( ) PKMK ( ) PKMKC
( ) PKMT ( ) PKMM
3. Ketua Pelaksana Kegiatan
a. Nama Lengkap : Toto Alfian Wahyuono
b. NIM : 10.41020.0035
c. Jurusan : Sistem Komputer
d. Universitas/Institut/Politeknik : STMIK Surabaya
e. Alamat Rumah/Telp./fax. : Jl.Kebraon Manis Barat BJ/01
HP. 0898 7755 3473
f. Alamat Email : [email protected]
4. Anggota Pelaksana Kegiatan/Penulis : 2 orang
5. Dosen Pendamping
a) Nama Lengkap dan Gelar : Anjik Sukmaaji, S.Kom., M.Eng
b) NIDN : 0731057301 c) Alamat Rumah dan No Tel./HP : Jl. Mawar D/25 Graha Sedati Mas
Sidoarjo -081803050789
6. Biaya Kegiatan Total :
a. Dikti : Rp. 12.395.000
b. Sumber lain : Rp. -
7. Jangka Waktu Pelaksanaan : 5 Bulan
Menyetujui
Surabaya, 30 Oktober 2012
Ketua Program Studi
(Anjik Sukmaaji, S.Kom., M.Eng)
NIDN. 0731057301
Ketua Pelaksana Kegiatan
(Toto Alfian Wahyuono)
NIM. 10.41020.0035
Pembantu Ketua III
Bidang Kemahasiswaan & Alumni
(Dr. Bambang Hariadi, M.Pd)
NIP. 900034
Dosen Pendamping
(Anjik Sukmaaji, S.Kom., M.Eng.)
NIDN. 0731057301
ii
KATA PENGANTAR
Puji syukur selalu terpanjatkan atas kehadirat Tuhan Yang Maha Esa atas
segala karunia dan rahmat-Nya yang luar biasa, sehingga Program Kreativitas
Mahasiswa bidang kegiatan Penelitian (PKM-P) telah diselesaikan dengan baik.
PKM-P ini membahas tentang modifikasi pergerakan mobile robot untuk
mencapai tujuan dengan menggunakan odometry dan sensor garis. Sistem dalam
karya tulis ini dibuat untuk memberikan kemudahan bagi mobile robot untuk bisa
menjangkau sensor yang diberikan oleh suatu garis, sehingga bisa menjadi suatu
alat bantu penggerak robot yang bisa bermanfaat.
Penyusunan karya tulis ini tidak lepas dari bantuan dan perhatian dari
berbagai pihak. Oleh karena itu, kami menyampaikan terima kasih kepada :
1. Prof. Dr. Budi Jatmiko, M.Pd., selaku Ketua Sekolah Tinggi Manajemen
Informatika & Teknik Komputer Surabaya.
2. Dr. Bambang Hariadi, M.Pd., selaku Pembantu Ketua III Sekolah Tinggi
Manajemen Informatika & Teknik Komputer Surabaya.
3. Anjik Sukmaaji, S.Kom., M.Eng., selaku Ketua Program Studi S1 Sistem
Komputer Sekolah Tinggi Manajemen Informatika & Teknik Komputer
Surabaya dan sebagai pembibing kami dalam mengerjakan PKM ini.
4. Erwin Sutomo, S.Kom, selaku Ketua Program Studi S1 Sistem Informasi dan
S1 Komputer Akuntansi Sekolah Tinggi Manajemen Informatika & Teknik
Komputer Surabaya.
5. Kedua orangtua kami yang telah memberikan dukungan, bantuan dan do’a
dalam penyelesaian proposal ini.
Karya tulis ini disusun dengan kemampuan dan bahan yang terbatas. Oleh
karena itu disadari masih terdapat ketidaksempurnaan dalam hal materi maupun
pembahasan, sehingga saran dan koreksi dalam upaya perbaikan karya tulis ini
sangat kami harapkan.
Surabaya, 30 Oktober 2012
Penulis
iii
DAFTAR ISI
HALAMAN PENGESAHAN ................................................................................ i
KATA PENGANTAR ........................................................................................... ii
DAFTAR ISI ......................................................................................................... iii
B. JUDUL ........................................................................................................ 1
C. LATAR BELAKANG MASALAH .......................................................... 1
D. RUMUSAN MASALAH ............................................................................ 1
E. TUJUAN ..................................................................................................... 1
F. LUARAN YANG DIHARAPKAN ........................................................... 2
G. KEGUNAAN .............................................................................................. 2
H. TINJAUAN PUSTAKA ............................................................................. 2
G.1 Mobile Robot ............................................................................................... 2 G.2 Odometry ...................................................................................................... 2
G.3 Sensor Garis ................................................................................................. 3
I. METODE PELAKSANAAN .................................................................... 4
J. JADWAL KEGIATAN .............................................................................. 5
K. RANCANGAN BIAYA .............................................................................. 5
DAFTAR PUSTAKA ............................................................................................ 8
Lampiran 1 .......................................................................................................... 9
1
A. JUDUL
Modifikasi Pergerakan Mobile Robot Menggunakan Sensor Garis dan Odometry
B. LATAR BELAKANG MASALAH
Pada aplikasi robot dikenal istilah posisi relatif. Posisi relatif ini biasanya
didasarkan pada perhitungan rotasi roda. Posisi relatif ini bukan untuk
menentukan posisi absolut dari robot tetapi hanya memperkirakan saja. Sensor
yang umum digunakan untuk mendapatkan data posisi dari suatu robot adalah
rotary encoder yang mana data dari sensor ini akan dimasukkan dalam
perhitungan odometry sehingga menghasilkan posisi relatif dari robot tersebut.
Odometry adalah penggunaan data dari sensor pergerakan untuk memperkirakan
perubahan posisi dari waktu ke waktu. Odometry ini akan memetakan posisi robot
dalam sumbu Cartesian. Sehingga akan didapatkan data posisi berupa titik
koordinat (path) dan arah hadap (heading) dari robot tersebut. David P. Anderson
membuat robot yang dalam navigasinya tidak menggunakan referensi dari luar
seperti GPS dan lainnya .Dalam bergerak robot akan mengukur perubahan path
atau posisi dari waktu ke waktu, sehingga akan diketahui error atau kesalahan dari
arah hadap robot terhadap path tujuan. Untuk dapat menuju path tujuan,
seharusnya error dari arah hadap robot ini adalah nol. Untuk itu maka penulis
menggunakan sensor garis untuk menjaga agar error yang dihasilkan selama
perjalanan dari robot tersebut mendekati dan atau sama dengan nol.
C. RUMUSAN MASALAH
Adapun rumusan masalah dari latar belakang diatas adalah :
1. Bagaimana memodifikasi mobile robot berbasis sensor garis.
2. Bagaimana memodifikasi mobile robot berbasis odometry.
3. Bagaimana mengkolaborasikan odometri dan sensor garis pada mobile robot.
D. TUJUAN
Tujuan dari penelitian ini adalah untuk membuktikan bahwa sensor garis dan
odometry dapat mnstabilkan pergerakan mobile robot dengan pengurangan error
yang disebabkan oleh gangguan luar.
2
E. LUARAN YANG DIHARAPKAN
Luaran yang diharapkan adalah inovasi pergerakan mobile robot berupa artikel
yang dipublikasikan.
F. KEGUNAAN
Hasil dari modifikasi pergerakan mobile robot menggunakan sensor garis dan
odometry ini adalah unuk pengembangan ilmu dibidang robotika.
G. TINJAUAN PUSTAKA
G.1 Mobile Robot
Robot Mobile atau Mobile Robot adalah konstruksi robot yang ciri khasnya
adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan
badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan
posisi dari satu titik ke titik yang lain dengan bantuan navigasi dari sebuah
sensor(Hendra,asep:2010).
G.2 Odometry
(Ardilla,Fernando:2011) Odometry adalah penggunaan data dari pergerakan
aktuator untuk memperkirakan perubahan posisi dari waktu ke waktu. Odometry
digunakan untuk memperkirakan posisi relatif terhadap posisi awal. Untuk
memperkirakan posisi relatif robot, digunakan perhitungan jumlah pulsa yang
dihasilkan oleh sensor rotary encoder setiap satuan ukuran yang kemudian
dikonversi menjadi satuan millimeter. Untuk mendapatlan jumlah pulsa setiap
satu kali putaran roda digunakan rumus sebagai berikut:
K roda = 2 × � ×� (1)
pulsa_per_mm = resolusi enc / K roda (2)
Pada sistem penggerak diferensial terdapat dua roda,yaitu roda kanan dan
roda kiri dan dimisalkan jumlah pulsa_per_mm untuk roda kanan adalah
right_encoder dan roda kiri adalah left_encoder dan jarak antara dua roda adalah
wheel_base maka didapatkan jarak tempuh (distance) dan sudut orientasi (θ).
Rumusnya adalah sebagai berikut.
distance = (left_enc + right_enc) / 2 (3)
θ = (left_enc - right_enc) / wheel_base (4)

3
Karena θ adalah sudut dalam radian maka untuk mengetahui sudut dalam derajat
(heading) digunakan rumus sebagai berikut :
heading = θ × ���� (5)
Dari ketentuan diatas didapatkan bahwa nilai heading akan bernilai negatif
(-) ketika robot berputar melawan arah jarum jam dan akan bernilai positif (+)
ketika robot berputar searah dengan jarum jam. Dengan mengetahui jarak dan
sudut (distance dan θ) maka kita dapat mengetahui koordinat X dan koordinat Y
dengan persamaan trigonometri.
Gambar 2. Ilustrasi pada sumbu Cartesian
Dari ilustrasi diatas maka koordinat dari robot dapat kita ketahui dengan
rumus :
Xpos = distance × sin (θ) (6)
Ypos = distance × cos (θ) (7)
Untuk menentukan error arah hadap dari robot terhadap titik tujuan maka
digunakan teorema phytagoras yang akan menghasilkan posisi (path) saat ini dan
jarak terhadap titik tujuan, berikut perhitungannya:
x = X_tujuan - Xpos (8)
y = Y_tujuan - Ypos (9)
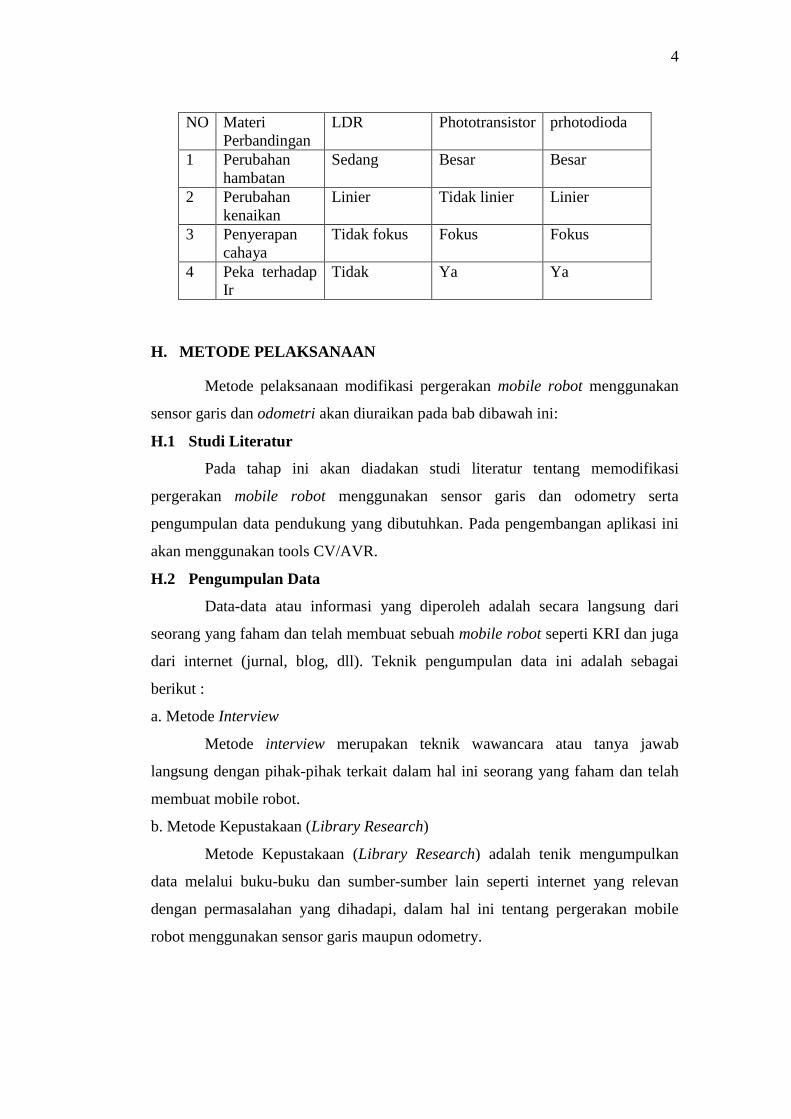
G.3 Sensor Garis
Sensor garis merupakan sensor yang dapat membaca perbedaan warna antara
hitam dan putih(umumnya). prinsip sensor ini menggunakan pantulan sinar
cahaya. sehingga sensor garis terdiri dari komponen transmitter dan receiver,
untuk transmitter ane menggunakan led superbright dan receiver'y menggunakan
photodiode, untuk receiver bisa diganti dengan LDR atau phototransistor. alasan
penggunaan sensor photodiode yaitu:
4
NO Materi
Perbandingan
LDR Phototransistor prhotodioda
1 Perubahan
hambatan
Sedang Besar Besar
2 Perubahan
kenaikan
Linier Tidak linier Linier
3 Penyerapan
cahaya
Tidak fokus Fokus Fokus
4 Peka terhadap
Ir
Tidak Ya Ya
H. METODE PELAKSANAAN
Metode pelaksanaan modifikasi pergerakan mobile robot menggunakan
sensor garis dan odometri akan diuraikan pada bab dibawah ini:
H.1 Studi Literatur
Pada tahap ini akan diadakan studi literatur tentang memodifikasi
pergerakan mobile robot menggunakan sensor garis dan odometry serta
pengumpulan data pendukung yang dibutuhkan. Pada pengembangan aplikasi ini
akan menggunakan tools CV/AVR.
H.2 Pengumpulan Data
Data-data atau informasi yang diperoleh adalah secara langsung dari
seorang yang faham dan telah membuat sebuah mobile robot seperti KRI dan juga
dari internet (jurnal, blog, dll). Teknik pengumpulan data ini adalah sebagai
berikut :
a. Metode Interview
Metode interview merupakan teknik wawancara atau tanya jawab
langsung dengan pihak-pihak terkait dalam hal ini seorang yang faham dan telah
membuat mobile robot.
b. Metode Kepustakaan (Library Research)
Metode Kepustakaan (Library Research) adalah tenik mengumpulkan
data melalui buku-buku dan sumber-sumber lain seperti internet yang relevan
dengan permasalahan yang dihadapi, dalam hal ini tentang pergerakan mobile
robot menggunakan sensor garis maupun odometry.
5
H.3 Pembuatan Mobile Robot
Hal pertama yang dilakukan sebelum membuat mobile robot adalah
membuat desain fisik antara lain rangka robot, desain elektro. Kemudian membuat
program yang dipasangkan pada robot agar robot bisa berjalan sesuai dengan
harapan.
H.4 Pengujian dan Analisa
Pengujian dan analisa dimaksudkan untuk mengetahui sejauh mana
robot yang dibuat ini dapat berfungsi sesuai dengan yang diharapkan. Hasil yang
dianalisa adalah data-data pengujian untuk memperbaiki jalannya robot.
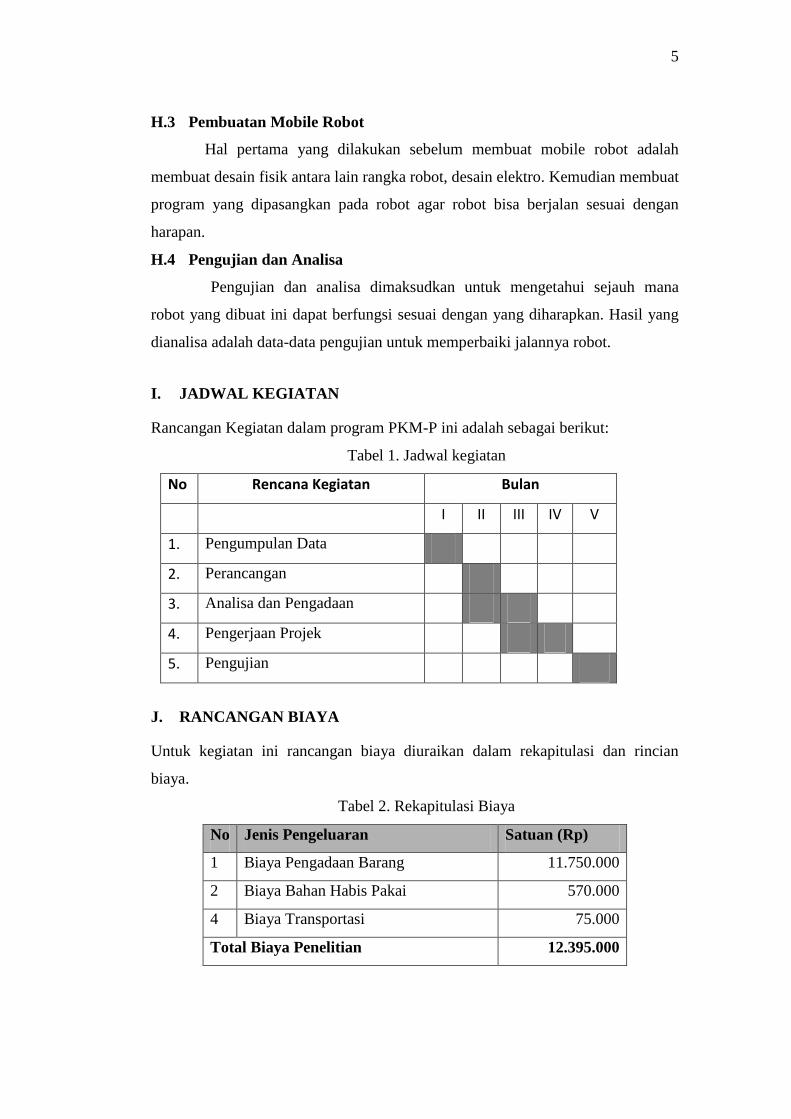
I. JADWAL KEGIATAN
Rancangan Kegiatan dalam program PKM-P ini adalah sebagai berikut:
Tabel 1. Jadwal kegiatan
No Rencana Kegiatan Bulan
I II III IV V
1. Pengumpulan Data
2. Perancangan
3. Analisa dan Pengadaan
4. Pengerjaan Projek
5. Pengujian
J. RANCANGAN BIAYA
Untuk kegiatan ini rancangan biaya diuraikan dalam rekapitulasi dan rincian
biaya.
Tabel 2. Rekapitulasi Biaya
No Jenis Pengeluaran Satuan (Rp)
1 Biaya Pengadaan Barang 11.750.000
2 Biaya Bahan Habis Pakai 570.000
4 Biaya Transportasi 75.000
Total Biaya Penelitian 12.395.000
6
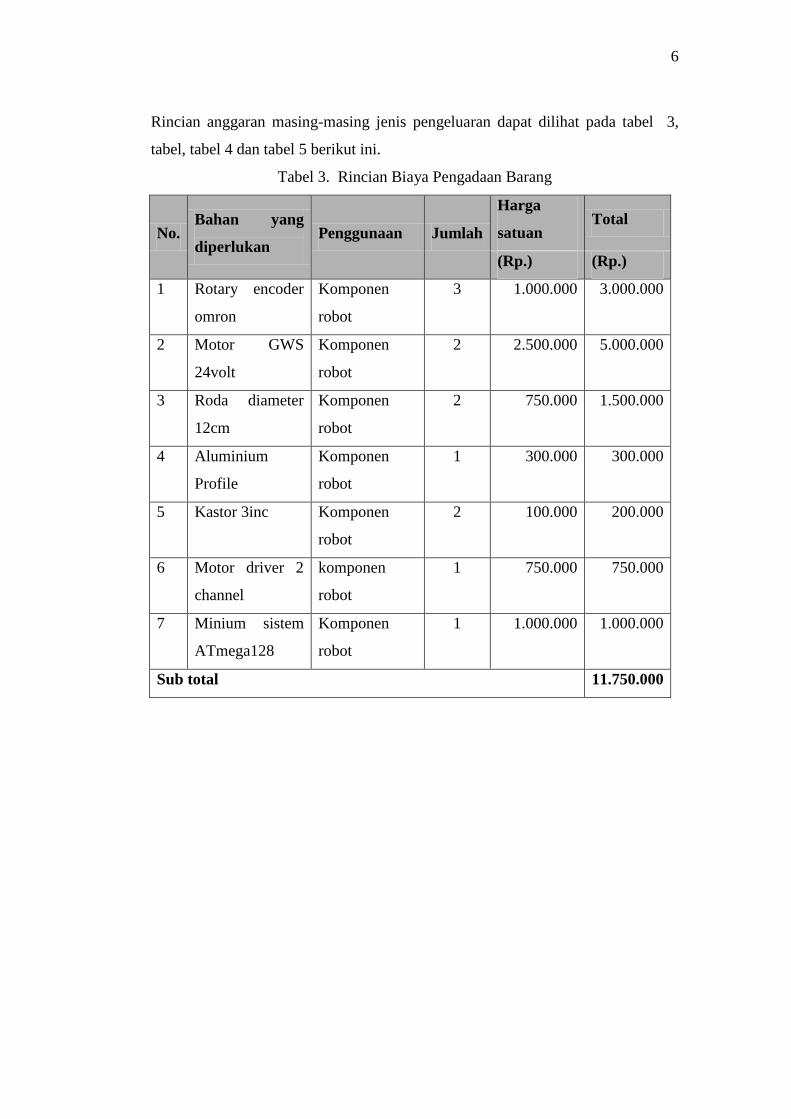
Rincian anggaran masing-masing jenis pengeluaran dapat dilihat pada tabel 3,
tabel, tabel 4 dan tabel 5 berikut ini.
Tabel 3. Rincian Biaya Pengadaan Barang
No. Bahan yang
diperlukan Penggunaan Jumlah
Harga
satuan Total
(Rp.) (Rp.)
1 Rotary encoder
omron
Komponen
robot
3 1.000.000 3.000.000
2 Motor GWS
24volt
Komponen
robot
2 2.500.000 5.000.000
3 Roda diameter
12cm
Komponen
robot
2 750.000 1.500.000
4 Aluminium
Profile
Komponen
robot
1 300.000 300.000
5 Kastor 3inc Komponen
robot
2 100.000 200.000
6 Motor driver 2
channel
komponen
robot
1 750.000 750.000
7 Minium sistem
ATmega128
Komponen
robot
1 1.000.000 1.000.000
Sub total 11.750.000
7
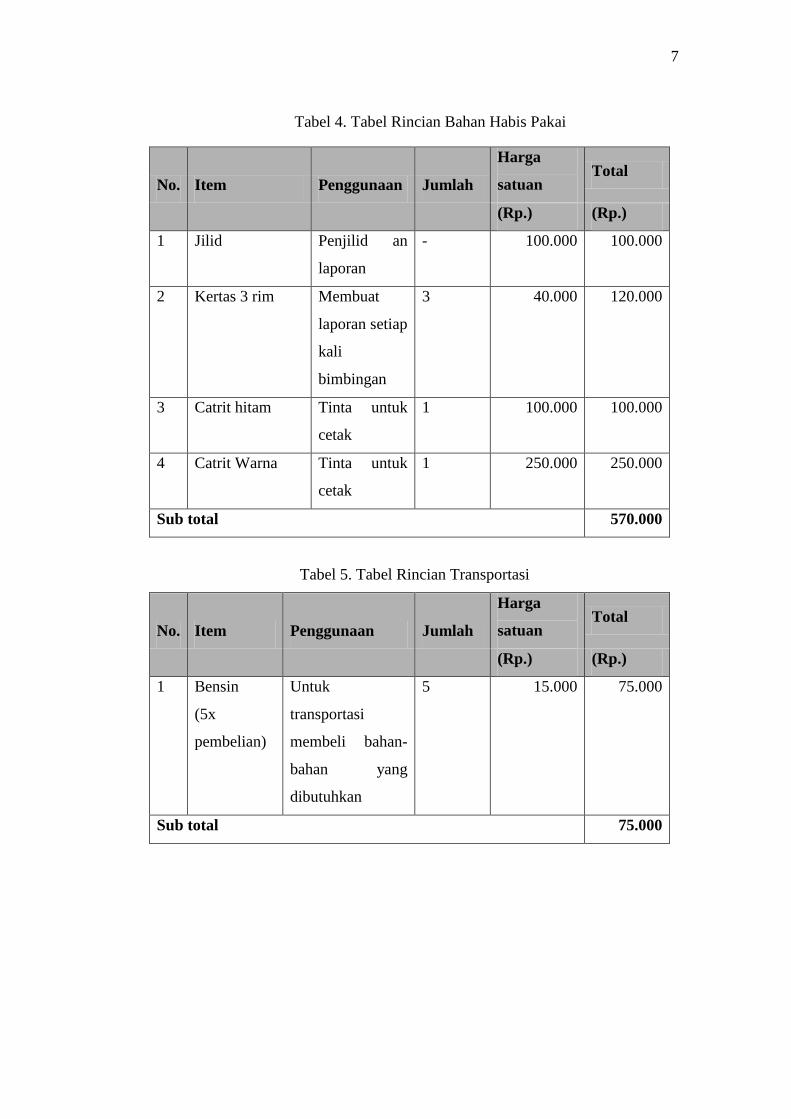
Tabel 4. Tabel Rincian Bahan Habis Pakai
No. Item Penggunaan Jumlah
Harga
satuan Total
(Rp.) (Rp.)
1 Jilid Penjilid an
laporan
- 100.000 100.000
2 Kertas 3 rim Membuat
laporan setiap
kali
bimbingan
3 40.000 120.000
3 Catrit hitam Tinta untuk
cetak
1 100.000 100.000
4 Catrit Warna Tinta untuk
cetak
1 250.000 250.000
Sub total 570.000
Tabel 5. Tabel Rincian Transportasi
No. Item Penggunaan Jumlah
Harga
satuan Total
(Rp.) (Rp.)
1 Bensin
(5x
pembelian)
Untuk
transportasi
membeli bahan-
bahan yang
dibutuhkan
5 15.000 75.000
Sub total 75.000

8
DAFTAR PUSTAKA
Anderson, David. 2006. IMU Odometry.
http://www.geology.smu.edu/%7Edpawww/ dpa.html. Texas
Romeo, S.T. 2003. Testing dan Implementasi sistem. Surabaya : STIKOM.
Ardila, Mara. 2011. Navigasi Mobile robot berbasis Trajektori dan Odometry.
Surabaya : ITS
9
LAMPIRAN
Lampiran 1
Daftar Riwayat Hidup Ketua
1. Biodata Ketua Serta Anggota Kelompok
a. Ketua Pelaksana Kegiatan
1. Nama lengkap : Toto Alfian Wahyuono
2. NIM : 10.41020.0035
3. Program Studi : S1 / Sistem Komputer
4. Perguruan Tinggi : Sekolah Tinggi Manajemen Informatika dan
Teknik Komputer Surabaya
5. Waktu untuk kegiatan : 24 jam/minggu
6. Tempat, Tanggal lahir : Surabaya, 28 Mei 1992
7. Alamat : Jl. Kebraon Manis Barat BJ/01 Surabaya
8. Email : [email protected]
Tanda Tangan
Toto Alfian Wahyuono
10
b. Anggota Pelaksana Kegiatan
1. Nama lengkap : Adisti Machmudah
2. NIM : 09.41010.0221
3. Program Studi : S1 / Sistem Informasi
4. Perguruan Tinggi : Sekolah Tinggi Manajemen Informatika
dan Teknik Komputer Surabaya
5. Waktu untuk kegiatan : 24 jam/minggu
6. Tempat, Tanggal lahir : Surabaya, 13 November 1991
7. Alamat : Jl. Manukan Bhakti 20 C No.19 Surabaya
8. Email : [email protected]
Tanda Tangan
Adisti Machmudah
11
c. Anggota Pelaksana Kegiatan
1. Nama lengkap : Lukman Hakim Suryaselaksa
2. NIM : 10.41020.0105
3. Program Studi : S1 / Sistem Komputer
4. Perguruan Tinggi : Sekolah Tinggi Manajemen Informatika
dan Teknik Komputer Surabaya
5. Waktu untuk kegiatan : 24 jam/minggu
6. Tempat, Tanggal lahir : Surabaya, 16 Juli 1989
7. Alamat : Jl. KH. Ach. Fadlil 6A Sidayu-Gresik
8. Email : [email protected]
Tanda Tangan
Lukman Hakim Suryaselaksa
12
2. Biodata Dosen Pendamping
1. Nama Lengkap dan Gelar : Anjik Sukmaaji, S.Kom., M.Eng
2. Golongan Pangkat dan NIDN : 0731057301
3. Jabatan Fungsional : Lektor
4. Jabatan Struktural : Kabag Laboratorium Komputer
5. Program Studi : Sistem Komputer
6. Perguruan Tinggi : Sekolah Tinggi Manajemen Informatika
& Teknik Komputer Surabaya
7. Bidang Keahlian : Sistem Komputer
8. Tempat, Tanggal lahir : Ponorogo, 31 Mei 1973
9. Alamat : Jl. Mawar D/25 Graha Sedati Mas Sidoarjo
10. Email : [email protected]
11. Penelitian :
a. Rancang Bangun Aplikasi Multi-Tier Dengan Teknologi
DCOM, (Computer File),1998, Skripsi-STIKOM Surabaya.
b. Pemisahan Campuran Sinyal Suara dan Derau pada Komunikasi
Internet untuk Aplikasi Pembelajaran Jarak Jauh (Penelitian
Dosen Muda, DP2M, Dikti, 2004, Ketua).
c. Pemantauan Jaringan Komputer melalui SMS dengan Seleksi
Logfile Menggunakan Shell Scripting dan ICMP (Penelitian
Dosen Muda, DP2M, DIKTI, 2004, anggota).
d. Perancangan dan Implementasi Network Inventory Collection
System untuk Mendukung Pengelolaan dan Monitoring Aset TI
– Studi Kasus:STIKOM(STMIK) Surabaya. 2008. Tesis: UGM-
Yogyakarta.
e. Network Inventory Collection System Berbasis Open Source
untuk Mendukung Perencanaan Investasi TI. Insentif RISTEK
2009.
12. Publikasi Ilmiah :
1. Investasi Teknologi Informasi di Indonesia: Sebuah Survei,
Dipublikasikan: Prosiding Seminar Nasional Sistem Informasi
Indonesia – Sesindo 2009, hal 137, ISBN: 978-979-18985-1-5.

13
2. Aplikasi Network Inventory Collection System(NICS) untuk
Mendukung Perencanaan Investasi TI, dipublikasikan:Prosiding
SNASTI 2009 - Seminar Nasional Sistem & Teknologi
Informasi, 2 Desember 2009, hal 87., ISBN:978-979-8968-303.
3. Network Inventory Collection System for Managing and
Monitoring Information Technology Asset, publish:The 5th
International Conference on Information & Communication
Technology and system (ICTS) 2009, August 4 th 2009,
page:253-256. ISSN:2085-1944.
4. Aplikasi Manajemen Firewall OpenBSD Menggunakan
Bootable Live CD Berbasis Web, Dipublikasikan di: JURNAL
GEMATEK Vol 7 NO 2, SEPTEMBER 2005, hal:89-99
(seluruhnya:61-119 ) Penerbit: Penelitian Pengabdian
Masyarakat Sekolah Tinggi Manajemen Informatika & Teknik
Komputer Surabaya, Indonesia ISSN: 1411-2086.
5. Pendukung Perencanaan Kapasitas Jaringan dengan Pengukur
Throughput Jaringan, Dipublikasikan di: JURNAL GEMATEK
Vol 7 NO 1, MARET 2005, hal:29-39 (seluruhnya:1-60 )
Penerbit: Penelitian Pengabdian Masyarakat Sekolah Tinggi
Manajemen Informatika & Teknik Komputer Surabaya,
Indonesia ISSN: 1411-2086.
6. Authentiction System bagi Pengguna Akses Internet pada
Wireless LAN, Dipublikasikan di: JURNAL GEMATEK Vol 6
NO 1, MARET 2004, hal: 30-40 (seluruhnya: 1-40) Penerbit:
Penelitian Pengabdian Masyarakat Sekolah Tinggi Manajemen
Informatika & Teknik Komputer Surabaya, Indonesia ISSN:
1411-2086.
7. Sistem Otomatisasi Peralatan Elektronik Menggunakan PC dan
Microcontroller 8031 Berbasis Teknologi WAP, Dipublikasikan
di: JURNAL GEMATEK Vol 5 NO 2, SEPTEMBER 2003, hal:
79-89 (seluruhnya: 45-89) Penerbit: Penelitian Pengabdian

14
Masyarakat Sekolah Tinggi Manajemen Informatika & Teknik
Komputer Surabaya, Indonesia ISSN: 1411-2086.
8. Pengaturan Lalu Lintas Data Antar Segmen Jaringan Komputer
Dengan Memanfaatkan PC486, Dipublikasikan di: JURNAL
GEMATEK VOLUME 3, Nomor 2, September 2001, hal: 85-92
(seluruhnya: 63-113) Penerbit: Bagian Penelitian Pengabdian
Masyarakat Sekolah Tinggi Manajemen Informatika & Teknik
Komputer Surabaya, Indonesia ISSN: 1411-2086.
9. Rancang Bangun Program Berbasis Internet Untuk Pengujian
Intelegensi Orang Dewasa, Dipublikasikan di: JURNAL
GEMATIKA VOLUME 3 NOMOR 2 September 2001, hal: 84-
100 (seluruhnya: 55-130) Penerbit: Bagian Penelitian
Pengabdian Masyarakat Sekolah Tinggi Manajemen Informatika
& Teknik Komputer Surabaya, Indonesia ISSN: 1411-2094.
Tanda Tangan
Anjik Sukmaaji, S.Kom., M.Eng