modul 9 transformasi laplace - cdn-edunex.itb.ac.id
TRANSCRIPT

Tria Laksana Achmad ST., MT., Ph.D.
MG2113 Matematika Terapan
Modul 9 TRANSFORMASI LAPLACE


ℒ 𝑓( ) = 𝐹
Input: Fungsi f( ) Output: Fungsi F( )
𝐹( ) = න
0
∞
𝑒− 𝑓 𝑑Operasi integral yang
menghasilkan F(s) dari
f(t) yang diketahui
𝑓 = ℒ−1 𝐹
Transform kebalikan
Untuk menyelesaikan integral tak wajar diatas:
න
0
∞
𝑒− 𝑓 𝑑 = lim𝑇→∞
න
0
𝑇
𝑒− 𝑓 𝑑

Metode untuk memecahkan persoalan
matematis dengan langkah-langkah:
Transformasi masalah
“sulit” menjadi
persamaan “mudah”
Pemecahan
persamaan
pembantu
secara
aljabar
Transformasi kembali /
kebalikan untuk memperoleh
solusi masalah semula
Input:
Fungsi
f( )
Output:
Fungsi
F( )

Misalkan f(t) = 1 untuk
t ≥ 0. Tentukan F(s)
𝐹 𝑠 = ℒ 𝑓 = ℒ 1 = න
0
∞
𝑒−𝑠𝑡 1 𝑑𝑡
𝐹( ) = න
0
∞
𝑒− 𝑓 𝑑
= න
0
∞
𝑒−𝑠𝑡𝑑𝑡 = lim𝑇→∞
ቤ−1
𝑠𝑒−𝑠𝑡
0
𝑇
= lim𝑇→∞
−1
𝑠𝑒−𝑠𝑇 +
1
𝑠𝑒0
untuk s > 0, ℒ 1 =1
𝑠
=1
𝑠

Misalkan 𝑓 𝑡 = 𝑒𝑎𝑡 untuk t ≥
0, dengan a konstanta, s – a >
0, tentukan ℒ 𝑓
ℒ 𝑓 = ℒ 𝑒𝑎𝑡 = න
0
∞
𝑒−𝑠𝑡𝑒𝑎𝑡𝑑𝑡 = න
0
∞
𝑒(𝑎−𝑠)𝑡𝑑𝑡
= lim𝑇→∞
อ𝑒(𝑎−𝑠)𝑡
𝑎 − 𝑠0
𝑇
= lim𝑇→∞
1
𝑎 − 𝑠𝑒 𝑎−𝑠 𝑇 −
1
𝑎 − 𝑠𝑒0
untuk s – a > 0 atau s > a
= 0 −1
𝑎 − 𝑠
ℒ 𝑒𝑎𝑡 =1
𝑠 − 𝑎

ℒ
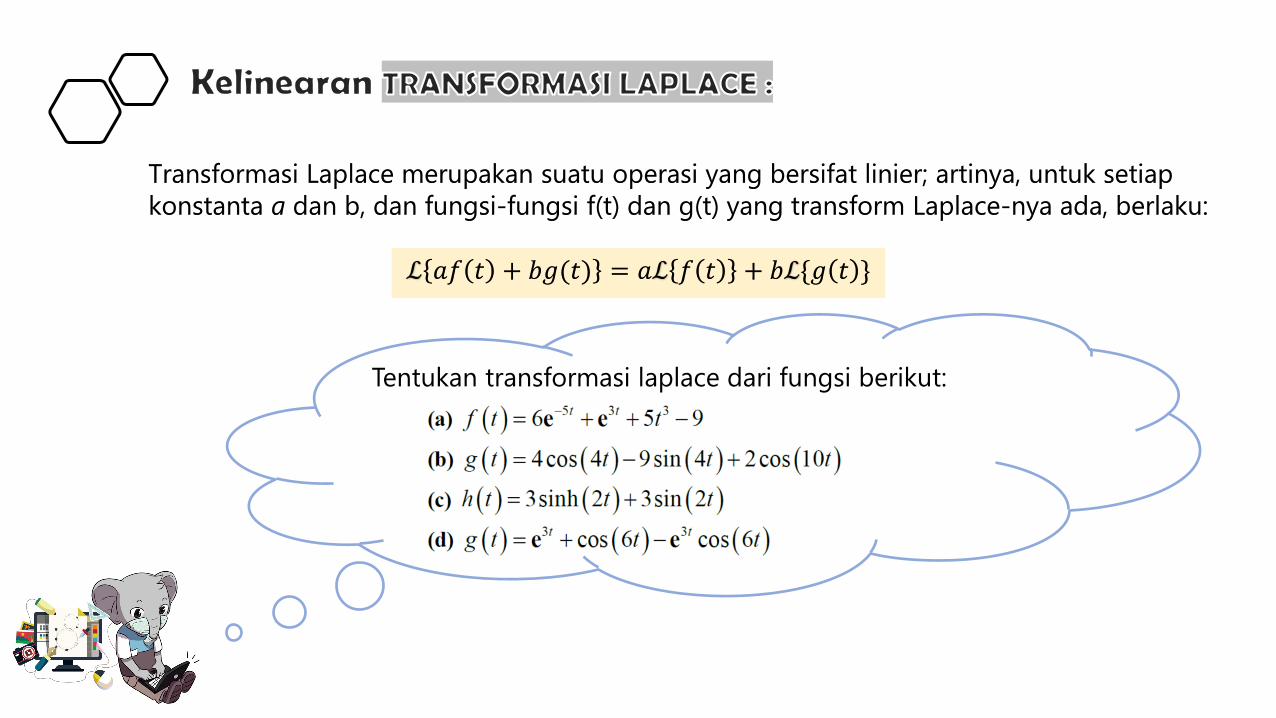
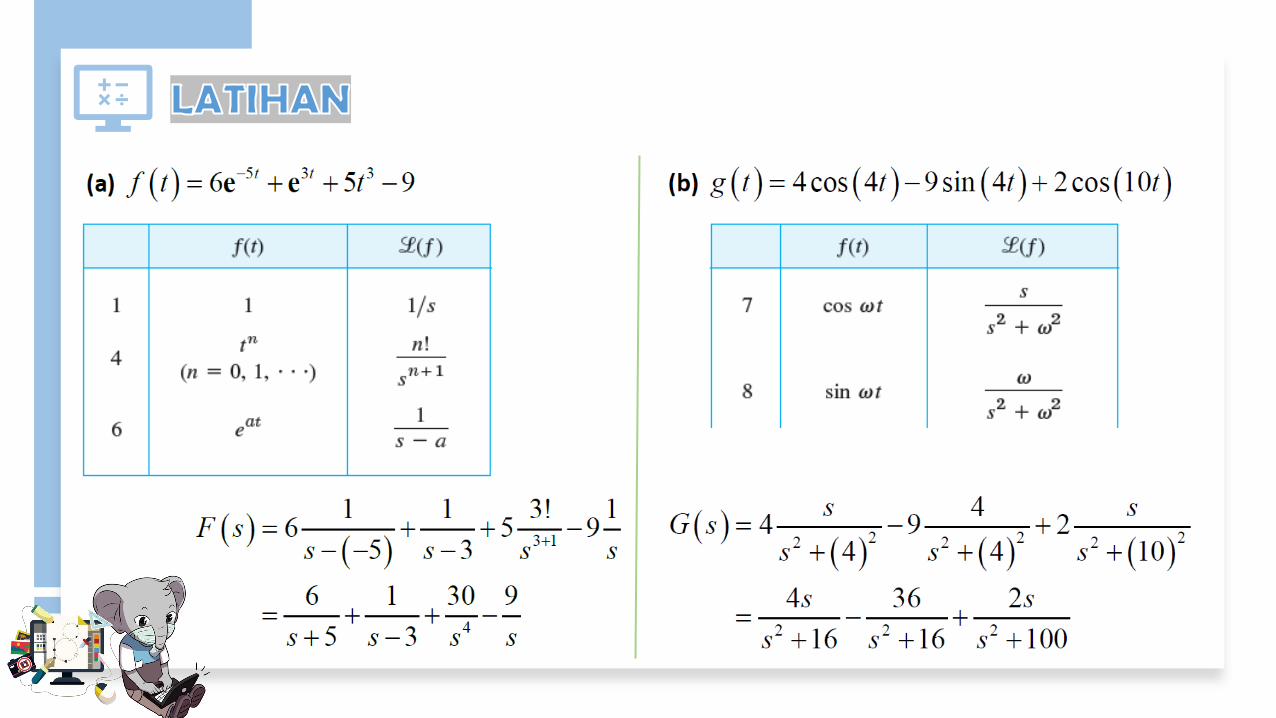
Transformasi Laplace merupakan suatu operasi yang bersifat linier; artinya, untuk setiap
konstanta a dan b, dan fungsi-fungsi f(t) dan g(t) yang transform Laplace-nya ada, berlaku:
ℒ 𝑎𝑓 𝑡 + 𝑏𝑔(𝑡) = 𝑎ℒ 𝑓 𝑡 + 𝑏ℒ{𝑔 𝑡 }
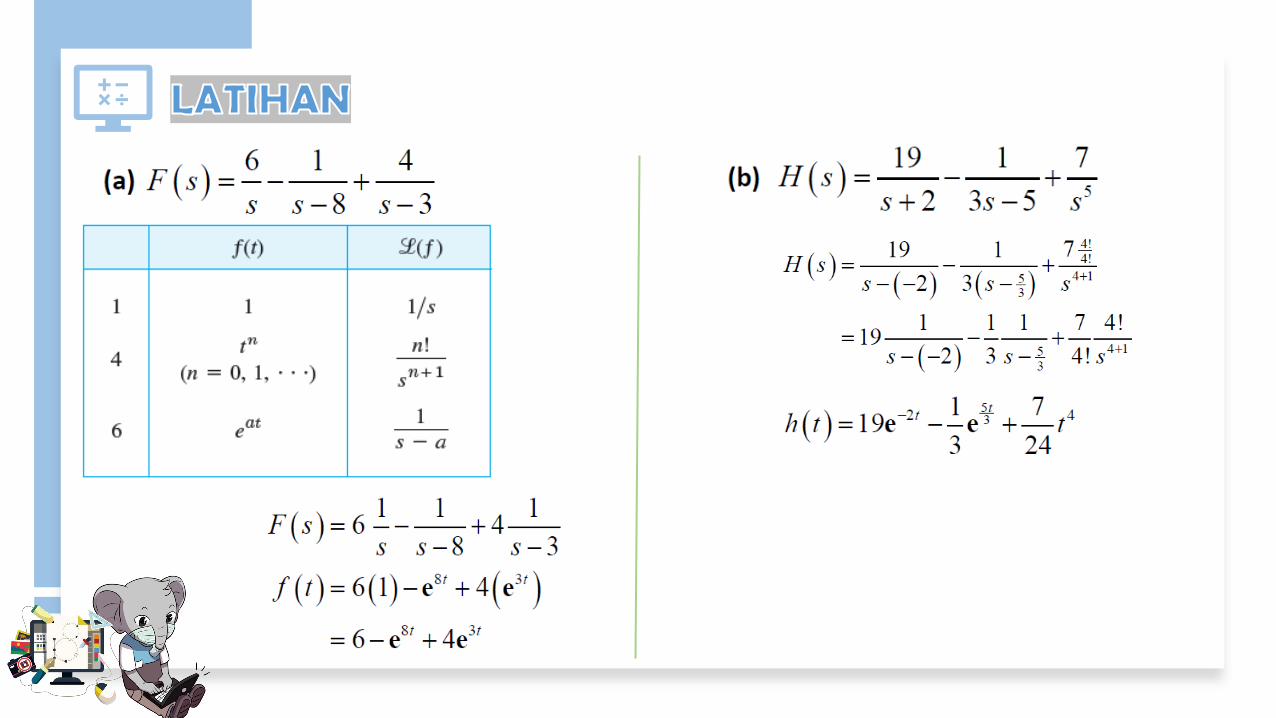
Tentukan transformasi laplace dari fungsi berikut:

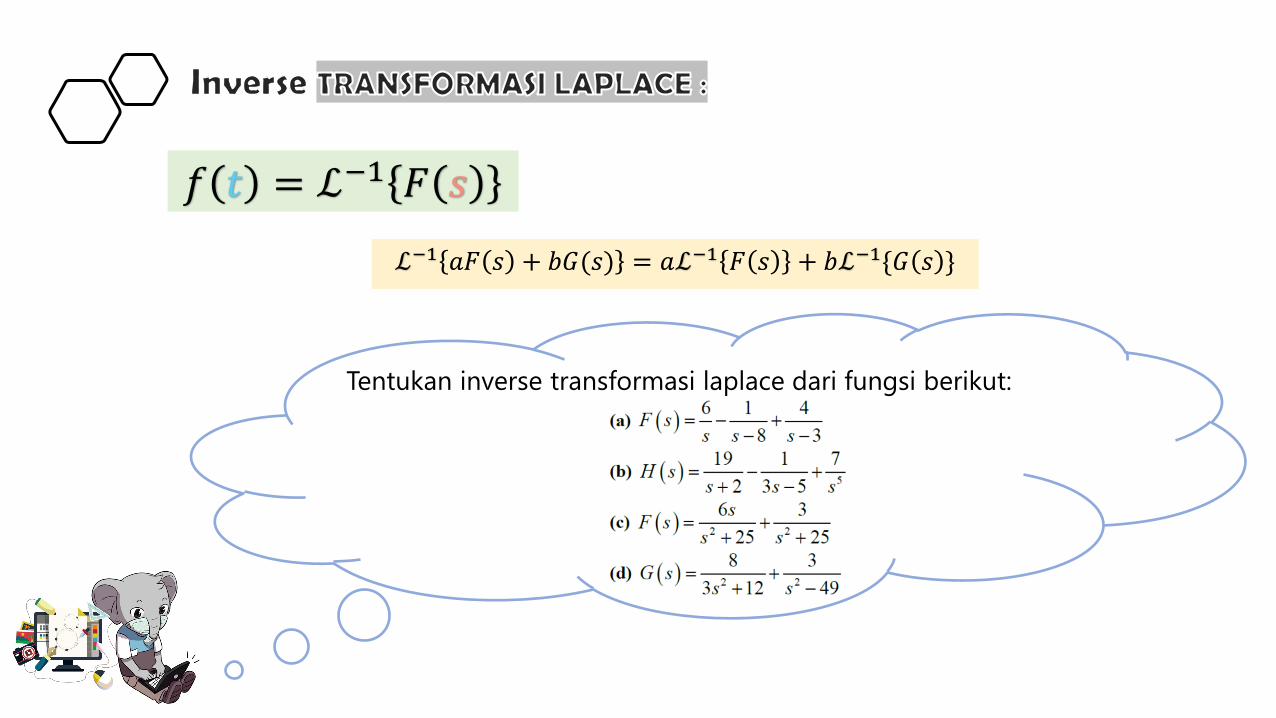
ℒ−1 𝑎𝐹 𝑠 + 𝑏𝐺(𝑠) = 𝑎ℒ−1 𝐹 𝑠 + 𝑏ℒ−1{𝐺 𝑠 }
Tentukan inverse transformasi laplace dari fungsi berikut:
𝑓 = ℒ−1 𝐹


Modul 9 TRANSFORMASI LAPLACE
Tria Laksana Achmad ST., MT., Ph.D.
MG2113 Matematika Terapan

−𝑓 0 ℒ 𝑓
ℒ 𝑓′ =ℒ 𝑓′ = න
0
∞
𝑒− 𝑡𝑓′(𝑡)𝑑𝑡
න𝑢𝑣′𝑑𝑡 = 𝑢𝑣 − න𝑢′𝑣𝑑𝑡 = ቚ𝑒− 𝑡𝑓(𝑡)0
∞+ න
0
∞
𝑒− 𝑡𝑓(𝑡)𝑑𝑡
= 0 − 𝑓 0 + ℒ 𝑓

ℒ 𝑓′ = ℒ 𝑓 −𝑓 0
ℒ 𝑓′′ = ℒ 𝑓′ −𝑓′ 0
= ℒ 𝑓 − 𝑓 0 −𝑓′ 0
ℒ 𝑓′′ = ℒ 𝑓 − 𝑓 0 −𝑓′ 0
ℒ 𝑓′′′ = ℒ 𝑓 − 𝑓 0 − 𝑓′ 0 − 𝑓′′(0)
ℒ 𝑓(𝑛) = 𝑠𝑛ℒ 𝑓 − 𝑠𝑛−1𝑓 0 − 𝑠𝑛−2𝑓′ 0 −. . . −𝑓(𝑛−1)(0)
Transform Laplace bagi 𝑓(𝑛):

Tentukan solusi persamaan diferensial berikut:
y” + 4y’ + 3y = 0, y(0) = 3, y’(0) = 1
Transformasi masalah
“sulit” menjadi
persamaan “mudah”
Pemecahan
persamaan
pembantu
secara
aljabar
Transformasi kembali /
kebalikan untuk memperoleh
solusi masalah semula
Input:
Fungsi
f( )
Output:
Fungsi
F( )

Tentukan solusi persamaan diferensial berikut:
y” + 4y’ + 3y = 0, y(0) = 3, y’(0) = 1
Jika Y 𝑠 = ℒ 𝑦 adalah transform Laplace
bagi solusi 𝑦(𝑡) yang belum diketahui, maka
ℒ 𝑓′′ = 𝑠2ℒ 𝑓 − 𝑠𝑓 0 − 𝑓′ 0
ℒ 𝑦′′ = 𝑠2𝑌 − 𝑠𝑦 0 − 𝑦′ 0
ℒ 𝑦′′ = 𝑠2𝑌 − 3𝑠 − 1
ℒ 𝑦′ = 𝑠𝑌 − 𝑦 0
ℒ 𝑦′ = 𝑠𝑌 − 3
Substitusikan ini ke dalam transform Laplace bagi
persamaan diferensial semula
ℒ(𝑦") + 4ℒ(𝑦′) + 3ℒ(𝑦) = ℒ(0)
𝑠2𝑌 − 3𝑠 − 1 + 4 𝑠𝑌 − 3 + 3𝑌 = 0
(subsidiary equation)

𝑠2𝑌 + 4𝑠𝑌 + 3𝑌 = 3𝑠 + 13
Persamaan pembantu di atas dapat dituliskan menjadi
𝑌 𝑠2 + 4𝑠 + 3 = 3𝑠 + 13
𝑠 + 1 𝑠 + 3 𝑌 = 3𝑠 + 13
Dengan memecahkan secara aljabar untuk Y dan dengan menggunakan
pecahan parsial:
𝑌 =3𝑠 + 13
(𝑠 + 1)(𝑠 + 3)=
𝐴
𝑠 + 1+
𝐵
𝑠 + 3
=𝐴 𝑠 + 3 + 𝐵(𝑠 + 1)
𝑠 + 1 (𝑠 + 3)=
𝐴 + 𝐵 𝑠 + (3𝐴 + 𝐵)
𝑠 + 1 (𝑠 + 3)Sehingga 𝐴+𝐵=3 dan 3𝐴+𝐵=13.
Dengan eliminasi diperoleh 𝐴=5 dan 𝐵=−2

ℒ−11
𝑠 + 3= 𝑒−3𝑡
ℒ−11
𝑠 + 1= 𝑒−𝑡

Tentukan solusi persamaan diferensial berikut:
y” + 4y’ + 3y = 0, y(0) = 3, y’(0) = 1
Transformasi masalah
“sulit” menjadi
persamaan “mudah”
Pemecahan
persamaan
pembantu
secara
aljabar
Transformasi kembali /
kebalikan untuk memperoleh
solusi masalah semula
Input:
Fungsi
f( )
Output:
Fungsi
F( )

Tentukan transformasi laplace
dari fungsi
Kita peroleh f(0) = 0 dan
f´(t) = sin 4t + 4t cos 4t → f´(0) = 0
f´´(t) = 4 cos 4t + 4 cos 4t - 16t sin 4t
f´´(t) =8 cos 4t –16t sin 4t = 8 cos 4t – 16f(t)
Sehingga ℒ(f´´) = s2ℒ(f) – 0 – 0 = 8ℒ(cos 4t) – 16ℒ(f)
Dengan menggunakan rumus untuk transform
Laplace bagi cos ωt, kita memperoleh
𝑠2 + 16 ℒ 𝑓 = 8ℒ(cos 4𝑡) =8𝑠
𝑠2+16
Jadi, ℒ 𝑓 = ℒ 𝑡 sin 4𝑡 =8𝑠
(𝑠2+16)2
𝑢𝑣 ′ = 𝑢′𝑣 + 𝑢𝑣′
ℒ 𝑓′′ = ℒ 𝑓 − 𝑓 0 − 𝑓′ 0
ℒ cos𝜔𝑡 =𝑠
𝑠2 + 𝜔2

Modul 9 TRANSFORMASI LAPLACE
Tria Laksana Achmad ST., MT., Ph.D.
MG2113 Matematika Terapan

Jika ℒ 𝑓 𝑡 = 𝐹(𝑠), maka
ℒ 𝑒𝑎𝑡𝑓 𝑡 = 𝐹(𝑠 − 𝑎)
Jadi jika kita mengetahui transform 𝐹(𝑠)
bagi 𝑓 𝑡 , maka kita dapat memperoleh
Teorema pergeseran pertama,
pergeseran pada sumbu-s

ℒ 𝑒𝑎𝑡𝑓 𝑡 = 𝐹(𝑠 − 𝑎)
Bukti: Menurut definisi,
𝐹 𝑠 = න
0
∞
𝑒−𝑠𝑡𝑓 𝑡 𝑑𝑡
Sehingga:
𝐹 𝑠 − 𝑎 = න
0
∞
𝑒−(𝑠−𝑎)𝑡𝑓 𝑡 𝑑𝑡 = න
0
∞
𝑒−𝑠𝑡 𝑒𝑎𝑡𝑓 𝑡 𝑑𝑡
= ℒ 𝑒𝑎𝑡𝑓 𝑡
ℒ−1 𝐹(𝑠 − 𝑎) = 𝑒𝑎𝑡𝑓 𝑡transformasi kebalikan
terhadap kedua ruas

Jika ℒ 𝑓 =(𝑠−6)
(𝑠−1)2+4
tentukan f(t)
𝑓 𝑡 = ℒ−1 𝐹 = ℒ−1 (𝑠−6)
(𝑠−1)2+22
ℒ cos𝜔𝑡 =𝑠
𝑠2+𝜔2 , ℒ sin𝜔𝑡 =𝜔
𝑠2+𝜔2
Dalam hal ini kasusnya adalah pergeseran sebesar 1
dari sumbu s → a = 1
Sehingga berdasarkan teorema pergeseran pada
sumbu s dan Tabel transformasi laplace,
ℒ−1 (𝑠−6)
(𝑠−1)2+22= ℒ−1 (𝑠−1)
(𝑠−1)2+22−
2
(𝑠−1)2+22×
5
2

Pergeseran benda yang digantungkan
pada sebuah pegas dari posisi
kesetimbangannya dinyatakan
dengan persamaan diferensial orde
dua berikut:
y” + 2y’ + 5y = 0.
y(0)= 2 y’(0)= -4
dimana y(0) adalah posisi awal benda
dan y‘(0) adalah kecepatan awalnya
Tentukan solusi permasalahan di atas
dengan Transformasi Laplace.
Berdasarkan teorema transform Laplace
untuk turunan
𝐿 𝑓′′ = 𝑠2𝐿 𝑓 − 𝑠𝑓 0 − 𝑓′ 0 = 𝑠2𝑌 − 2𝑠 + 4
𝐿 𝑓′ = 𝑠𝐿 𝑓 − 𝑓 0 = 𝑠𝑌 − 2
Transformasi Laplace kedua ruas PD
menghasilkan:
𝑠2𝑌 − 2𝑠 + 4 + 2𝑠𝑌 − 4 + 5𝑌 = 0
𝑌 𝑠2 + 2𝑠 + 5 = 2𝑠
𝑌 𝑠 + 1 2 + 22 = 2s
𝑌 𝑠 =2s
𝑠+1 2+22= 2
𝑠+1
𝑠+1 2+22−
2
𝑠+1 2+22

𝑌 𝑠 = 2𝑠 + 1
𝑠 + 1 2 + 22−
2
𝑠 + 1 2 + 22
Dari Tabel Transformasi Laplace
𝐿−1𝑠
𝑠2+22= cos 2𝑡 dan 𝐿−1
2
𝑠2+22= sin 2𝑡
Sehingga berdasarkan teorema
𝑦 𝑡 = 𝐿−1 𝑌 = 2𝑒−𝑡 cos 2𝑡 − 𝑒−𝑡 sin 2𝑡
dimana pergeseran dari sumbu s sebesar -1 →
a = -1
Pergeseran benda yang digantungkan
pada sebuah pegas dari posisi
kesetimbangannya dinyatakan
dengan persamaan diferensial orde
dua berikut:
y” + 2y’ + 5y = 0.
y(0)= 2 y’(0)= -4
dimana y(0) adalah posisi awal benda
dan y‘(0) adalah kecepatan awalnya
Tentukan solusi permasalahan di atas
dengan Transformasi Laplace.
