bab iii perancangan dan pembuataneprints.umm.ac.id/39098/4/bab iii.pdf · menggunakan diagram blok....
TRANSCRIPT
33
BAB III
PERANCANGAN DAN PEMBUATAN
3.1 Perencanaan Desain
Dalam menentukan desain Anemometer berbasis akuisisi data terdapat
beberapa tahapan-tahapan yang bertujuan untuk mencari desain terbaik. Adapun
tahapan-tahapannya sebagai berikut:
3.1.1 Daftar Persyaratan Desain
Daftar persyaratan dibuat untuk menjelaskan spesifikasi Anemometer dan
persyaratan-persyaratan yang harus dipenuhi sebelum produk dikembangkan lebih
lanjut. Adapun daftar persyaratannya sebagai berikut:
Tabel 3.1 Daftar Persyaratan Spesifikasi Desain
Sifat Daftar Persyaratan Tanggal :
Anemometer Berbasis Akuisisi Data Halaman :1
S/W Persyaratan
Geometri
S Bentuk sederhana
W Alat dioperasikan menggunakan tenaga angin
S Alat dapat dioperasikan secara portable dan secara luar lapangan
Kinematik
S Tranduser yang yang digunakan adalah Optocoupler
34
W Hasil pembacaan Optocoupler berlogika 0 dan 1, sehingga
Anemometer menggunakan kipas (baling-baling kecil)
S Mekanisme penghubung kabel sensor yang berbentuk cincin dan
melingkar mengikuti arah angin
W Gerakan di masing-masing komponen harus teratur
Energi
W Menggunakan energi angin
S Menggunakan Arduino sebagai pengondisi tranduser
S Hemat Energi
Teknik Daftar Persyaratan tanggal
Anemometer Berbasis Akuisisi Data Halaman :2
D/W Persyaratan
Material
S Konstruksi rangka di buat dari bahan-bahan campuran alumunium dan
akrilik
S Kipas (baling-baling yang digunakan adalah bagian dari Anemometer
Wind Speed Air Velocity yang sudah dimodifikasi
W Komponen mudah didapat di pasaran
Keamanan
S Anemometer berbasis akuisisi data bisa dipasang di luar ruangan dan
operator bisa di dalam ruangan sehingga aman saat pengoperasian
W Dapat beroprasi pada siang dan malam hari
35
Ergonomi
S Kenyamanan dalam pengoprasian
S Menggunakan lampu indikator sehingga dapat diketahui kondisi alat
D Pengoprasian mudah dilakukan
S Bobot dari keseluruahan alat ringan
W Bunyi dari alat tidak bising
Produksi
S Jumlah komponen cukup minim
S Dapat dibuat/diproduksi oleh bengkel lokal
W Bentuk komponen sederhana dan tidak membutuhkan proses produksi
yang rumit
W Suku cadang mudah didapat
W Pembutan missal
Perawatan
S Tidak memerlukan perawatan khusus
W Komponen yang berhubungan dengan elektronika harus diperhatikan
Pengoperasian
D Kipas (baling-baling) alat dapat berputar mengikuti arah angin
D Mudah dalam pengoperasian
W Dapat dioperasikan oleh lebih dari satu orang
W Otomatis dapat melakukan penyimpanan secara realtime
Biaya
W Biaya produksi diharapkan tidak terlalu tinggi dan terjangkau
36
Transportasi
W Mudah dibawa dan mudah dikirim
W Mudah untuk dipindahkan
Pemrograman
W Arduino telah diisi program pada Sofware Arduino IDE
W Menggunakan Software PLX-DAQ yang terhubung ke Microsoft Excel
Persyaratan dibuat berdasarkan kebutukan Customer yang dapat bersifat
wajib dipenuhi (W) atau disarankan dipenuhi (S). Dari keterangan tersebut maka
dapat disimpulkan bahwa persyaratan yang dibuat merupakan panduan bagi
perancang untuk merancang alat (Riadi, Muhammad Sugeng, 2009).
3.1.2 Identifikasi Masalah
Pada tahap ini penulis bertujuan untuk menajamkan permasalahan yang
ada pada spesifikasi desain di atas. Adapun tahapannya sebagai berikut:
1. Data kuantitatif, dengan menghilangkan kesukaan/kesenangan pribadi dan
menghilangkan persyaratan yang tidak berkaitan langsung dengan fungsi
dan batasan-batasan penting (Riadi, Muhammad Sugeng, 2009). Dari
kriteria tersebut didapatkan hasil sebagai berikut:
a. Anemometer berbasis akuisisi data
b. Mengukur kecepatan angin
c. Dimensi Anemometer
d. Menggunakan sensor Optocoupler
e. Menggunakan Arduino Uno
37
f. Alat menggunakan tenaga angin
g. Jumlah baling-baling 6 buah
h. Alat dapat dioperasikan secara portable dan secara luar lapangan
i. Bobot alat yang ringan
j. Biaya produksi yang terjangkau
k. Menggunakan Software Microsoft Excel
l. Dapat mengakuisisi data secara realtime
m. Mudah dioperasikan
2. Mengubah data kuantitatif menjadi data kualitatif dan menyatakannya
dalam kalimat yang sederhana. Dari kriteria tersebut didapatkan hasil
sebagai berikut:
a. Anemometer berbasis akuisisi data
b. Untuk mengukur kecepatan angin
c. Ukuran Anemometer tertentu
d. Alat dapat dioperasikan secara portable dan secara luar lapangan
e. Memiliki bobot yang ringan dan biaya produksi yang terjangkau
f. Menggunakan Software Microsoft Excel untuk penyimpanan data
g. Dapat mengakuisisi data secara realtime
h. Data yang dihasilkan berbentuk nilai angka dan grafik untuk tujuan
pengarsipan
i. Alat difungsikan secara otomatis dan mudah dioperasikan
3. Kemudian mengelompokkan data kuantitatif. Dari kriteria tersebut
didapatkan hasil sebagai berikut:
a. Anemometer berbasis akuisisi data
38
b. Mengukur kecepatan angin
c. Dimensi yang sederhana
d. Menggunakan Software Microsoft Excel
e. Bentuk nilai angka dan grafik untuk tujuan pengarsipan
4. Memformulasikan masalah sehingga didapatkan hasil sebagai berikut.
Perancangan Anemometer berbasis akuisisi data untuk mengukur
kecepatan angin dengan dimensi yang sederhana menggunakan Software
Microsoft Excel yang berbentuk nilai angka dan grafik untuk tujuan
pengarsipan.
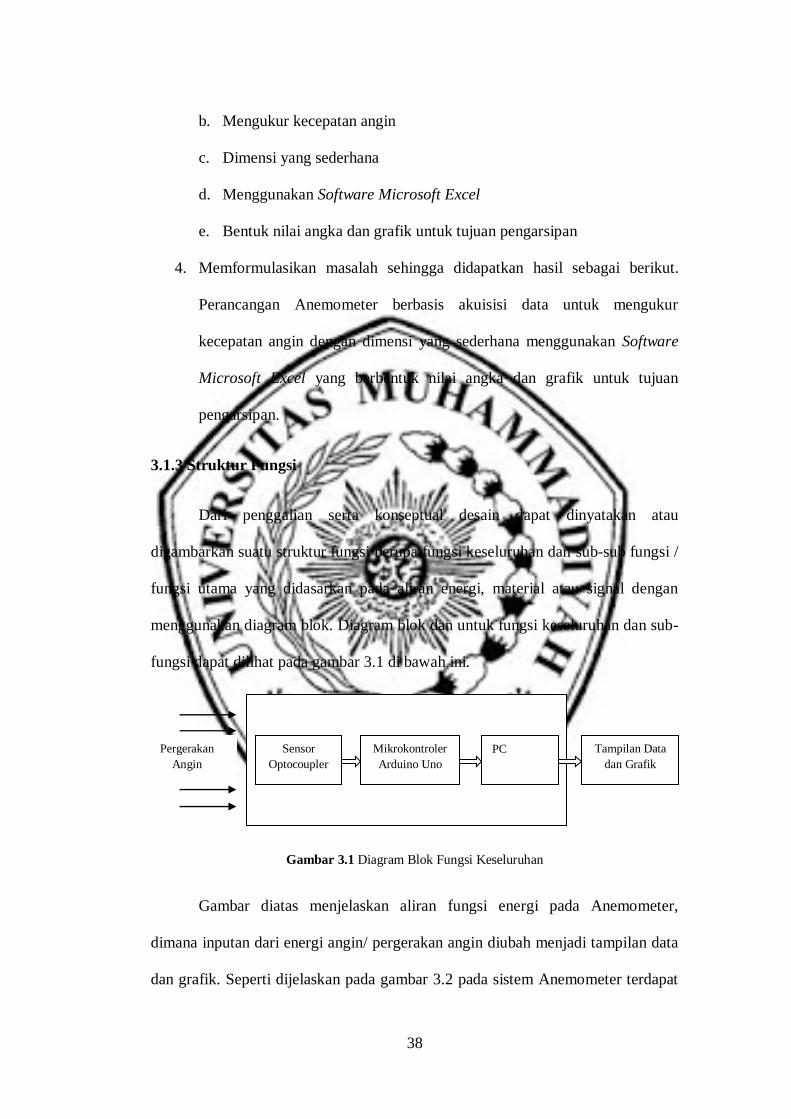
3.1.3 Struktur Fungsi
Dari penggalian serta konseptual desain dapat dinyatakan atau
digambarkan suatu struktur fungsi berupa fungsi keseluruhan dan sub-sub fungsi /
fungsi utama yang didasarkan pada aliran energi, material atau signal dengan
menggunakan diagram blok. Diagram blok dan untuk fungsi keseluruhan dan sub-
fungsi dapat dilihat pada gambar 3.1 di bawah ini.
Gambar 3.1 Diagram Blok Fungsi Keseluruhan
Gambar diatas menjelaskan aliran fungsi energi pada Anemometer,
dimana inputan dari energi angin/ pergerakan angin diubah menjadi tampilan data
dan grafik. Seperti dijelaskan pada gambar 3.2 pada sistem Anemometer terdapat
Pergerakan
Angin
Sensor
Optocoupler
Mikrokontroler
Arduino Uno
PC Tampilan Data
dan Grafik
39
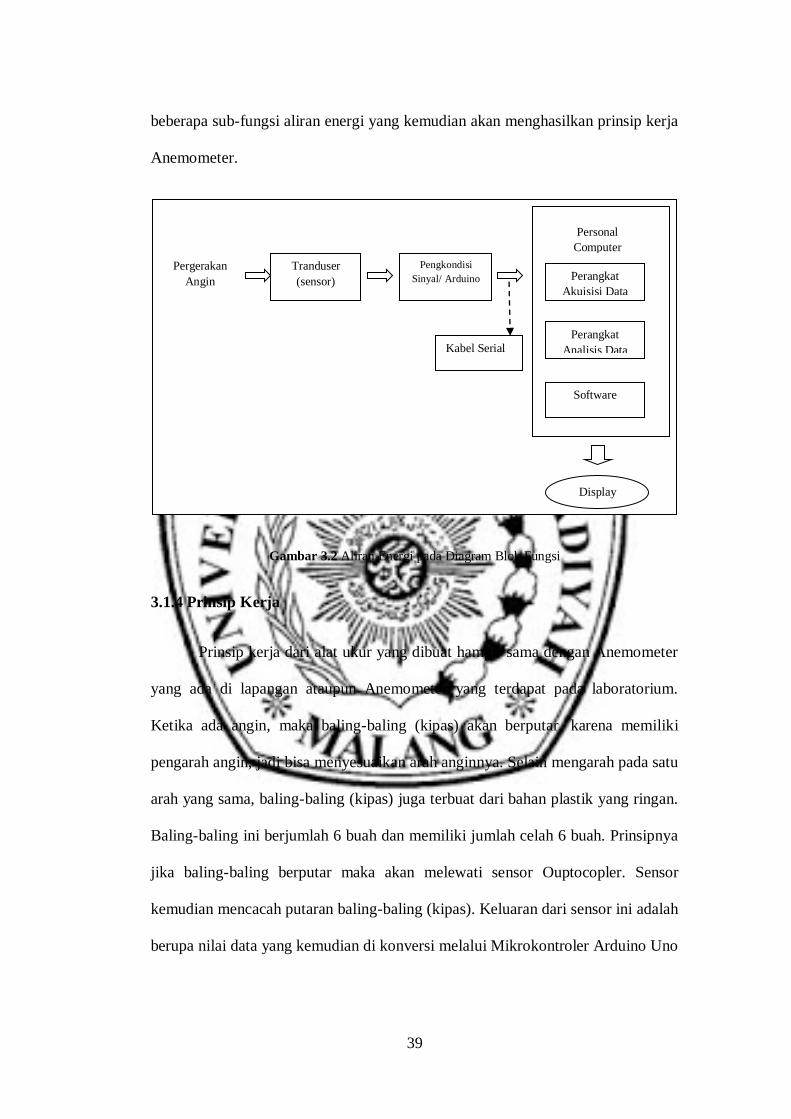
beberapa sub-fungsi aliran energi yang kemudian akan menghasilkan prinsip kerja
Anemometer.
Gambar 3.2 Aliran Energi pada Diagram Blok Fungsi
3.1.4 Prinsip Kerja
Prinsip kerja dari alat ukur yang dibuat hampir sama dengan Anemometer
yang ada di lapangan ataupun Anemometer yang terdapat pada laboratorium.
Ketika ada angin, maka baling-baling (kipas) akan berputar, karena memiliki
pengarah angin, jadi bisa menyesuaikan arah anginnya. Selain mengarah pada satu
arah yang sama, baling-baling (kipas) juga terbuat dari bahan plastik yang ringan.
Baling-baling ini berjumlah 6 buah dan memiliki jumlah celah 6 buah. Prinsipnya
jika baling-baling berputar maka akan melewati sensor Ouptocopler. Sensor
kemudian mencacah putaran baling-baling (kipas). Keluaran dari sensor ini adalah
berupa nilai data yang kemudian di konversi melalui Mikrokontroler Arduino Uno
Tranduser
(sensor)
Pengkondisi
Sinyal/ Arduino
Perangkat
Analisis Data
Software
Display
Data dan
Grafik
Personal
Computer
Pergerakan
Angin Perangkat
Akuisisi Data
Kabel Serial
40
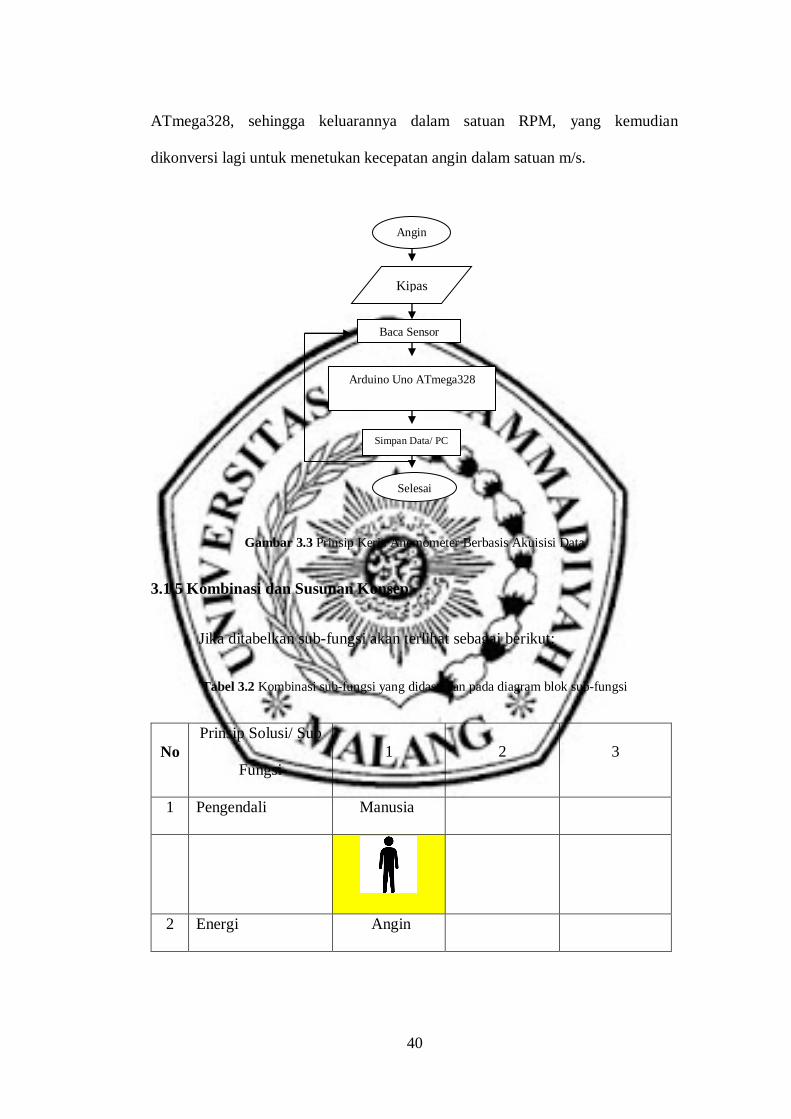
ATmega328, sehingga keluarannya dalam satuan RPM, yang kemudian
dikonversi lagi untuk menetukan kecepatan angin dalam satuan m/s.
Gambar 3.3 Prinsip Kerja Anemometer Berbasis Akuisisi Data
3.1.5 Kombinasi dan Susunan Konsep
Jika ditabelkan sub-fungsi akan terlihat sebagai berikut:
Tabel 3.2 Kombinasi sub-fungsi yang didasarkan pada diagram blok sub-fungsi
No
Prinsip Solusi/ Sub
Fungsi
1 2 3
1 Pengendali Manusia
2 Energi Angin
Angin
Kipas
Baca Sensor
Arduino Uno ATmega328
Simpan Data/ PC
Selesai
41
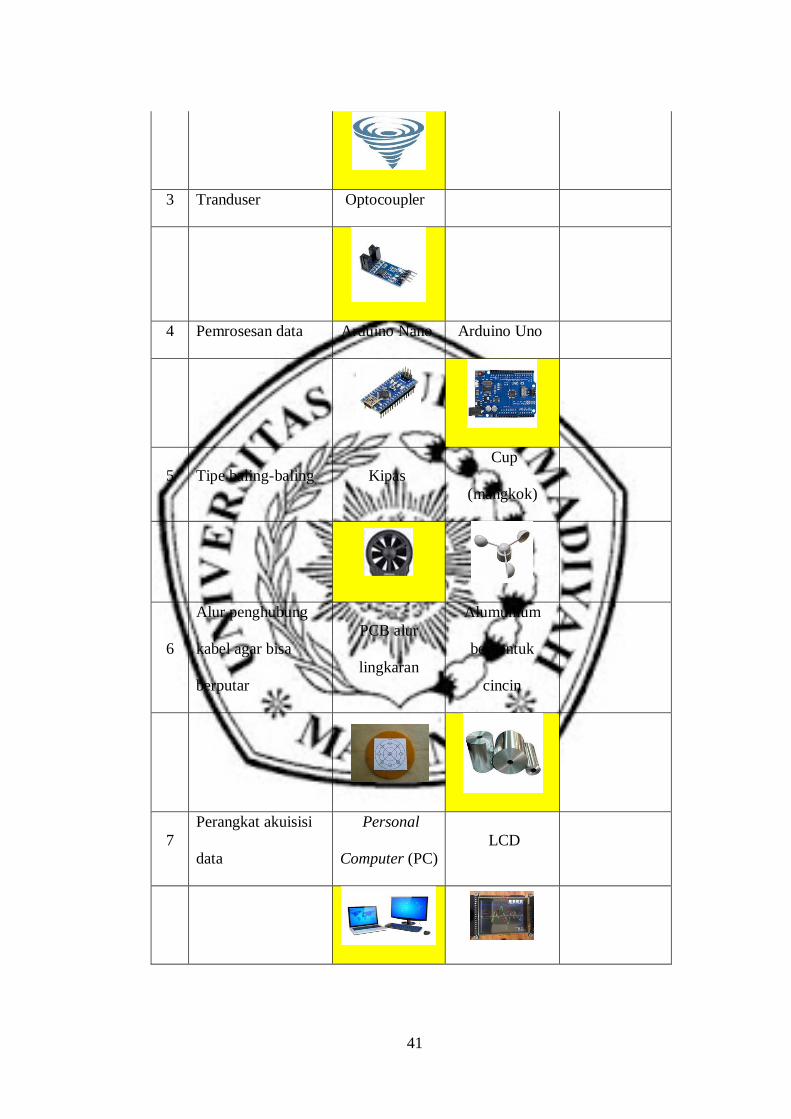
3 Tranduser Optocoupler
4 Pemrosesan data Arduino Nano Arduino Uno
5 Tipe baling-baling Kipas
Cup
(mangkok)
6
Alur penghubung
kabel agar bisa
berputar
PCB alur
lingkaran
Alumunium
berbentuk
cincin
7
Perangkat akuisisi
data
Personal
Computer (PC)
LCD

42
8
Aplikasi pembuatan
program
Arduino IDE CV-AVR
9
Aplikasi penampil
data
Arduino IDE
Microsoft
Excel
10
Aplikasi
penyimpanan data
Arduino IDE
Microsoft
Excel
Dari tabel hasil identifikasi masalah akan terlihat berbagai kemungkinan
kombinasi sub-fungsi yang mungkin untuk digunakan. Pemilihan masing-masing
alternatif didasarkan pada evaluasi teknik dan ekonomi (Riadi, Muhammad
Sugeng, 2009).
3.1.6 Pemilihan Konsep Varian
Dalam pembuatan konsep varian harus memperhatikan segi teknik dan
ekonominya. Pemilihan konsep varian dilakukan untuk pengerjaan model dan
menentukan unjuk kerja secara kuantitatif (Riadi, Muhammad Sugeng,
2009). Dari tabel 3.2 didapatkan hasil varian sebagai berikut:
43
Varian = 1-1, 2-1, 3-1, 4-2, 5-1, 6-2, 7-1, 8-1, 9-2, 10-2
3.2 Desain Perangkat Keras
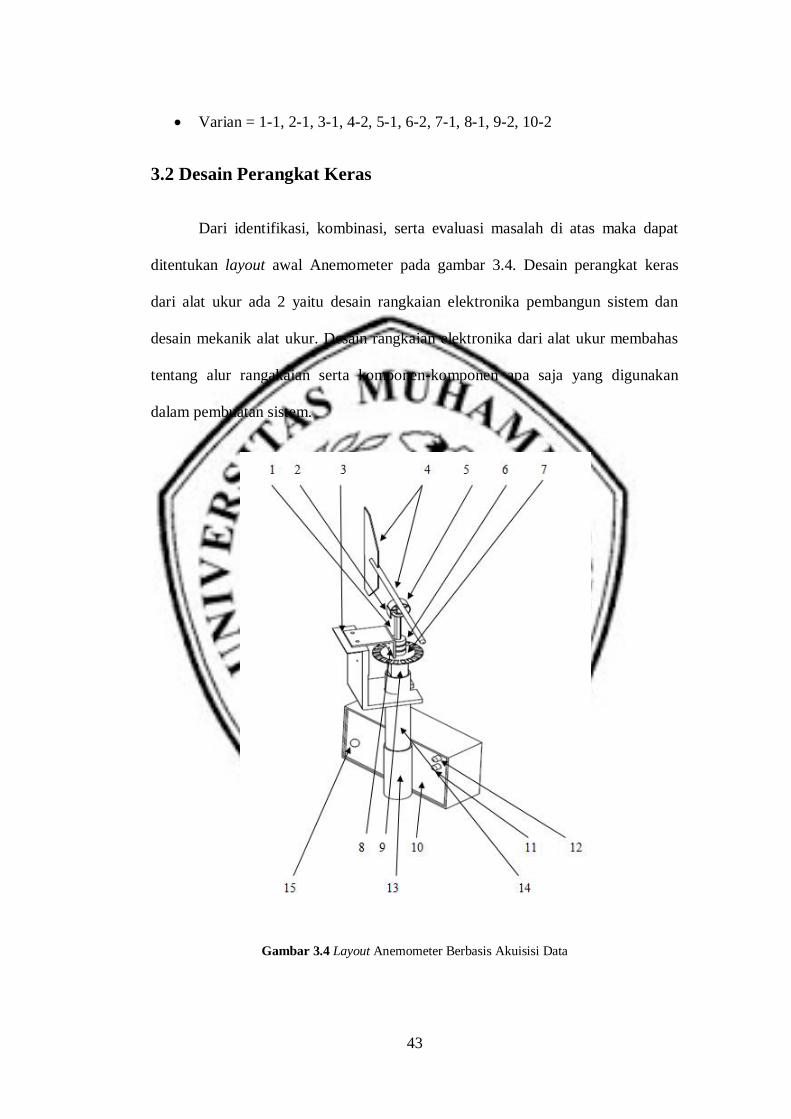
Dari identifikasi, kombinasi, serta evaluasi masalah di atas maka dapat
ditentukan layout awal Anemometer pada gambar 3.4. Desain perangkat keras
dari alat ukur ada 2 yaitu desain rangkaian elektronika pembangun sistem dan
desain mekanik alat ukur. Desain rangkaian elektronika dari alat ukur membahas
tentang alur rangakaian serta komponen-komponen apa saja yang digunakan
dalam pembuatan sistem.
Gambar 3.4 Layout Anemometer Berbasis Akuisisi Data
44
Keterangan gambar:
1. Baut pacer penumpu kipas
2. Sensor Optocoupler
3. Braket penghubung kabel
4. Pengarah angin
5. Kipas Anemometer
6. Alumunium cincin penghubung kabel
7. Piringan sebagai tumpuan cincin
8. Baut penghubung kabel
9. Poros dan bantalan lengkap yang bisa berputar bebas
10. Box elektronika
11. Lampu indikator biru
12. Lampu indikator hijau
13. Shok pipa PVC
14. Pipa PVC 1/2 inch
15. Lubang kabel sensor dan kabel serial
Pada gambar 3.4 dapat dilihat desain alat secara keseluruhan yang
sebenarnya terdiri dari dua bagian. Bagian pertama adalah bagian sistem mekanik
alat ukur yang terdiri dari baling-baling (kipas) dengan tiang penyangga beserta
dudukannya yang terbuat dari pipa PVC ½ inch. Pada badan tiang penyangga
dipasang sebuah mekanik yang berentuk cincin yang berfungsi untuk
menghubungkan kabel sensor ke Arduino lewat mekanik dari bahan alumunium
yang sudah dibuat sesuai dengan posisi jarak antara kabel penghubung dan di
samping kipas juga dipasangkan rangkaian sensor Optocoupler yang berfungsi
45
sebagai tranduser. Bagian kedua box atau kotak yang berfungsi untuk meletakkan
rangkaian elektronika pembangun sistem, yang terdiri dari kabel sensor, Arduino
dan sambungan USB.
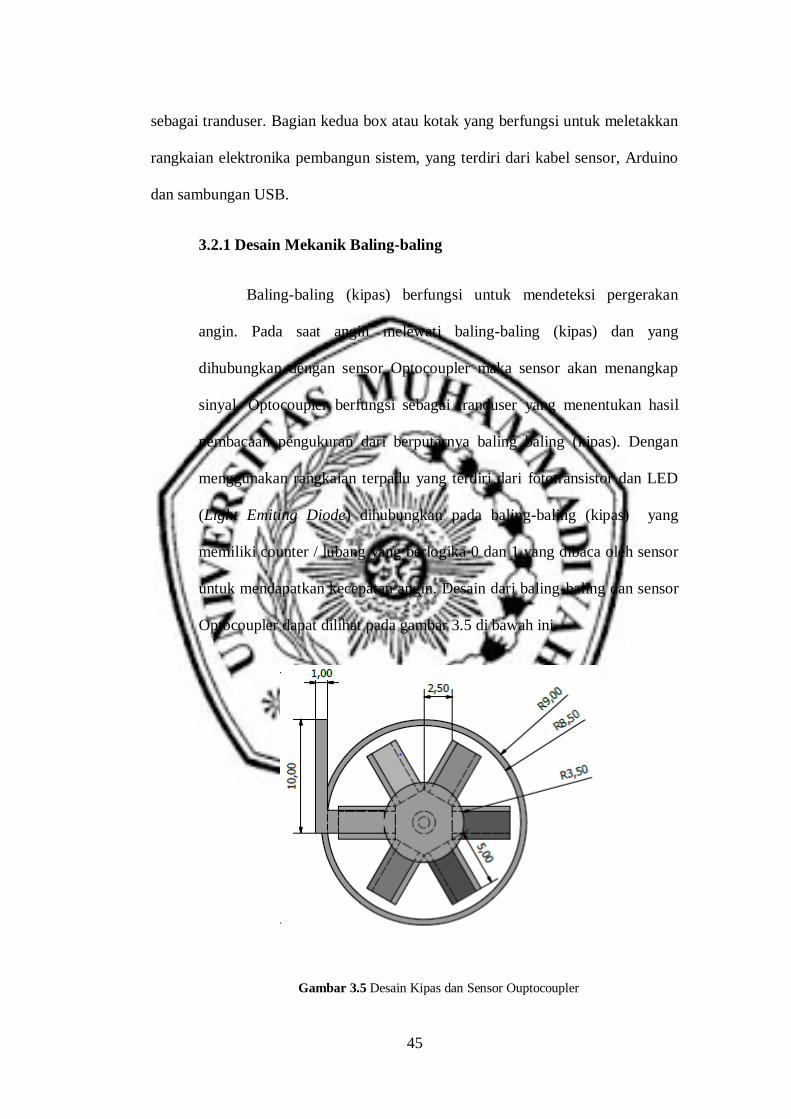
3.2.1 Desain Mekanik Baling-baling
Baling-baling (kipas) berfungsi untuk mendeteksi pergerakan
angin. Pada saat angin melewati baling-baling (kipas) dan yang
dihubungkan dengan sensor Optocoupler maka sensor akan menangkap
sinyal. Optocoupler berfungsi sebagai tranduser yang menentukan hasil
pembacaan pengukuran dari berputarnya baling baling (kipas). Dengan
menggunakan rangkaian terpadu yang terdiri dari fototransistor dan LED
(Light Emiting Diode) dihubungkan pada baling-baling (kipas) yang
memiliki counter / lubang yang berlogika 0 dan 1 yang dibaca oleh sensor
untuk mendapatkan kecepatan angin. Desain dari baling-baling dan sensor
Optocoupler dapat dilihat pada gambar 3.5 di bawah ini.
Gambar 3.5 Desain Kipas dan Sensor Ouptocoupler
46
Sensor Optocopler adalah sensor yang digunakan untuk mencacah
putaran baling-baling (kipas) untuk mendapatkan nilai putaran RPM
(Revolutions Per Minute) dari baling-baling kipas untuk selanjutnya
menentukan kecepatan angin. Misalkan dari hasil pengukuran didapatkan
data sebagai berikut:
- Jumlah hasil lubang yang terbaca satu periode adalah 200 lubang
- Radius baling baling adalah 10.5 mm
- Jumlah celah counter adalah 6 lubang
Berdasarkan persamaan,
𝒏 = 𝑱𝑯
𝑱𝑪 𝒙 𝟔𝟎 (3.1)
Dimana: 𝑛 = puataran (rpm)
JH = Jumlah hasil lubang yang terbaca,
JC = Jumlah celah counter
Maka hasil penghitungannya adalah sebagai berikut:
𝑛 = 200
6 𝑥 60
= 33.33 x 60
= 2000 rpm
Selanjutnya adalah menentukan kecepatan, dalam menentukan
kecepatan harus diketahui kecepatan sudut dari suatu benda/ lingkaran
kipas Anemometer. Untuk mendapatkan hasil kecepatan sudut baling-
baling menggunakan persamaan:
𝝎 = 𝟐 𝝅 𝒇 (3.2)
Dimana: 𝜔 = kecepatan sudut (rad/s)
𝜋 = 22/7 atau 3.14
47
f = 𝑛
𝑡 (rps)
maka, 𝜔 = 2 𝜋 f
= 2 x 3.14 x (2000
60)
= 209.33
Jadi, kecepatan yang dihasilkan adalah sebagai berikut:
V = 𝝎 𝒓 (3.3)
Dimana: 𝜔 = kecepatan sudut (rad/s)
𝜋 = 22/7 atau 3.14
f = 𝑛
𝑡 (rps)
r = jari-jari (m)
maka, V = 𝜔 r
= 209.33 x 0.0105
= 2.198 m/s ≈ 2.2 m/s
Jika kecepatan diketahui, tapi tidak ada RPM. Maka putaran dapat
diketahui dengan cara kebalikan kalkulasi diatas.
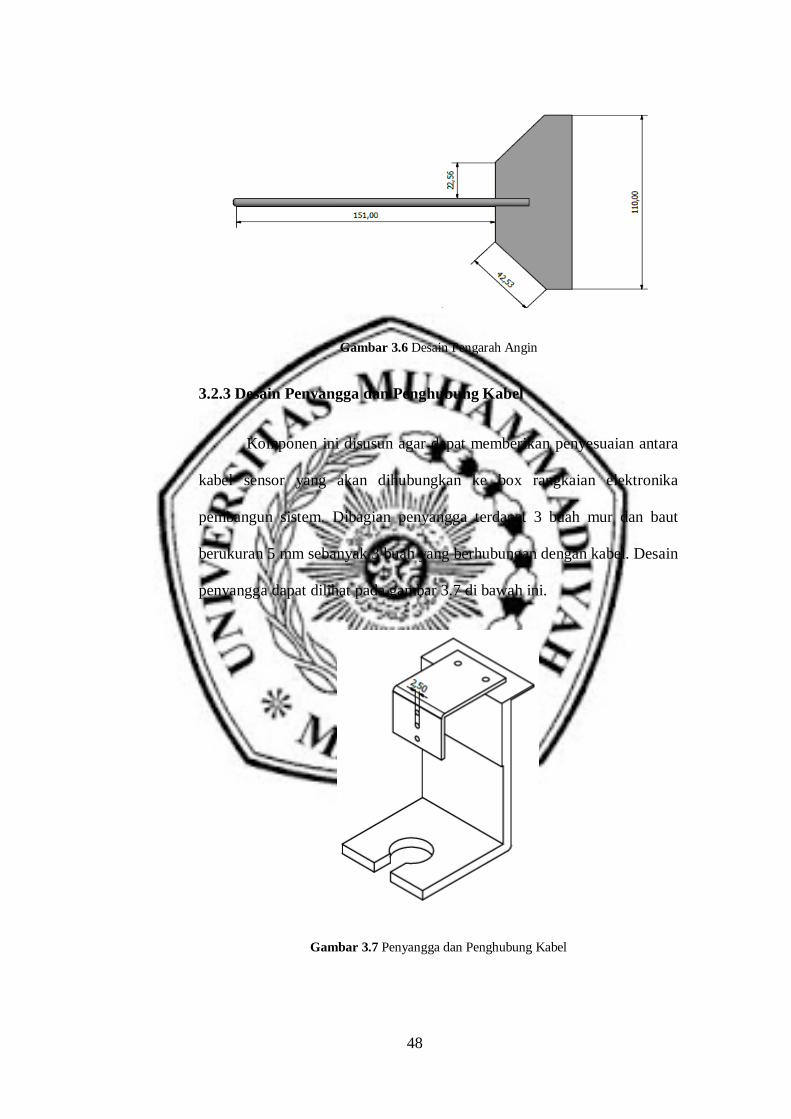
3.2.2 Desain Pengarah Angin
Pengarah Angin digunakan sebagai pengarah pergerakan angin
yang berfungsi untuk menyesuaikan pergerakan arah angin. Pengarah ini
menjadi komponen yang diperlukan agar kipas bisa berputar dan
menyesuaikan arah pergerakan dari angin. Desain pengarah angin dapat
dilihat pada gambar 3.6 di bawah ini.
48
Gambar 3.6 Desain Pengarah Angin
3.2.3 Desain Penyangga dan Penghubung Kabel
Komponen ini disusun agar dapat memberikan penyesuaian antara
kabel sensor yang akan dihubungkan ke box rangkaian elektronika
pembangun sistem. Dibagian penyangga terdapat 3 buah mur dan baut
berukuran 5 mm sebanyak 3 buah yang berhubungan dengan kabel. Desain
penyangga dapat dilihat pada gambar 3.7 di bawah ini.
Gambar 3.7 Penyangga dan Penghubung Kabel
49
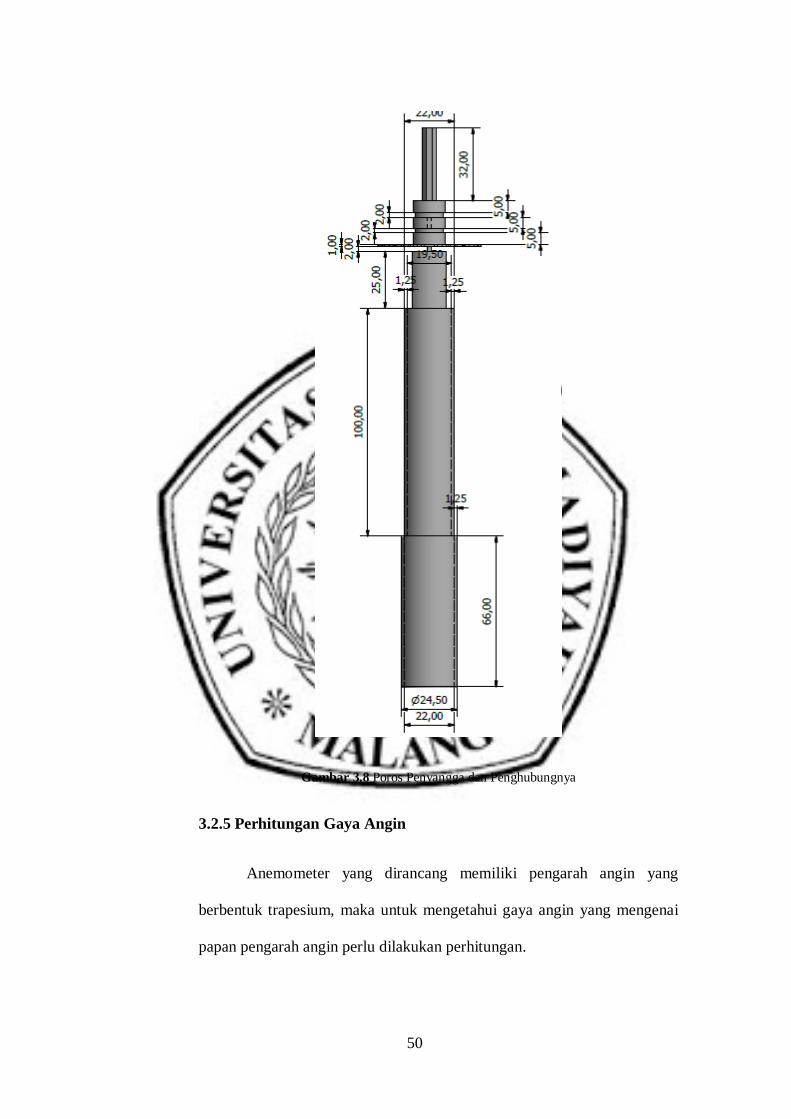
3.2.4 Desain Poros Penyangga dan Penghubungnya
Poros penyangga ini menggunakan pipa PVC ½ inch dan
dihubungkan pada poros yang memiliki bantalan lengkap serta covernya.
Poros ini berfungsi sebagai penggerak agar dapat berputar 360 derajat. Di
atas nya poros terdapat piringan fiber yang berhubungan dengan baut
pacer dan sebagai penumpu 3 buah cincin dari alumunium untuk
terhubung ke kabel penghubung yang menghubungkan ke box rangkaian
elektronika pembangun sistem. Poros ini telah didesain sedemikian rupa
sehingga poros bisa berputar bebas mengikuti arah angin. Desain Poros
penyangga dapat dilihat pada gambar 3.8 di bawah ini.
50
Gambar 3.8 Poros Penyangga dan Penghubungnya
3.2.5 Perhitungan Gaya Angin
Anemometer yang dirancang memiliki pengarah angin yang
berbentuk trapesium, maka untuk mengetahui gaya angin yang mengenai
papan pengarah angin perlu dilakukan perhitungan.
51
Data yang diketahui sebagai berikut:
- Kecepatan angin (v) = 20 m/s
- Massa jenis udara (kg/𝑚3) = 1,2 kg/𝑚3
Mencari Gaya Angin
Dalam menentukan gaya angin dari kecepatan angin pada Anemometer,
maka akan digunakan persamaan berikut:
Fw = 𝝆 𝒗𝟐 A (3.4)
Dimana: Fw = Gaya angin (N)
Pd = Tekanan Dinamik (Pa)
𝜌 = Massa jenis udara (kg/𝑚3)
𝑣 = Kecepatan angin (m/s)
A = Luas area (𝑚2)
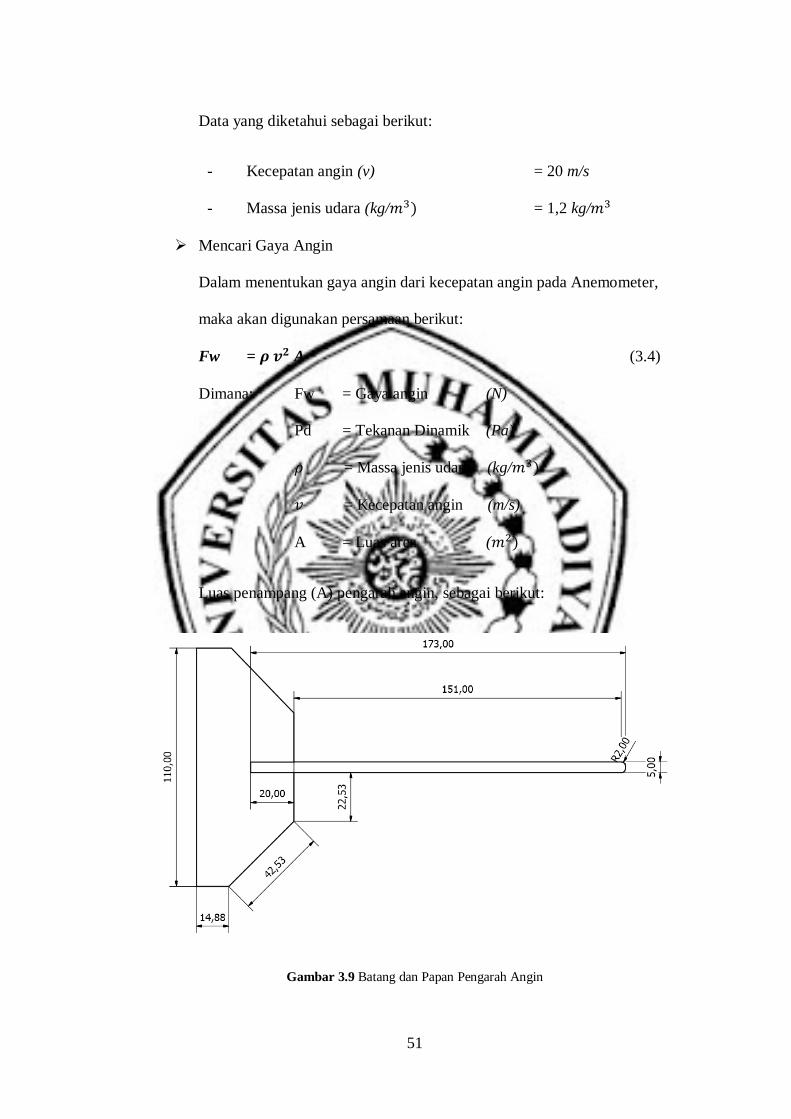
Luas penampang (A) pengarah angin, sebagai berikut:
Gambar 3.9 Batang dan Papan Pengarah Angin
52
Dalam menghitung luas batang pengarah angin menggunakan
persamaan sebagai berikut:
𝑨 = 𝝅𝒓𝟐 + 𝟐 𝝅 𝒓 𝒕 (3.5)
A = 22/7 x (0,0025)2 + 2 x 22/7 x 0,0025 x 0,151
A = 2,3903 x 10−3 𝑚2
Untuk papan pengarah angin dapat dihitung luasasn (A) sebagai
berikut, karena papan pengarah berbentuk trapesium namun ada kombinasi
dengan persegi panjang. Maka dapat dihitung dengan menggunakan
persamaan sebagai berikut:
A1 = p x l (3.6)
= 0,11 x 0,01488
= 1,6368 x 10−3 𝑚2
A2 = (Pa + Pb) x (t/2) (3.7)
= (0,11 + 0,04506) x (0,03/2)
= 2,3259 x 10−3 𝑚2
Sehingga didapatkan luas Penampang (A) total:
(A) total = 2,3903 + 1,6368 + 2,3259
= 6,353025 x 10−3 𝑚2
53
Jadi, untuk mencari gaya angin (Fw) adalah:
Fw = 𝝆 𝒗𝟐 A
= 1,2 x (202) x 6,353025 x 10−3
= 1,2 x 400 x 6,353025 x 10−3
= 3,048 N
Dari hasil perhitungan didapatkan gaya angin (Fw) adalah 3,048 N.
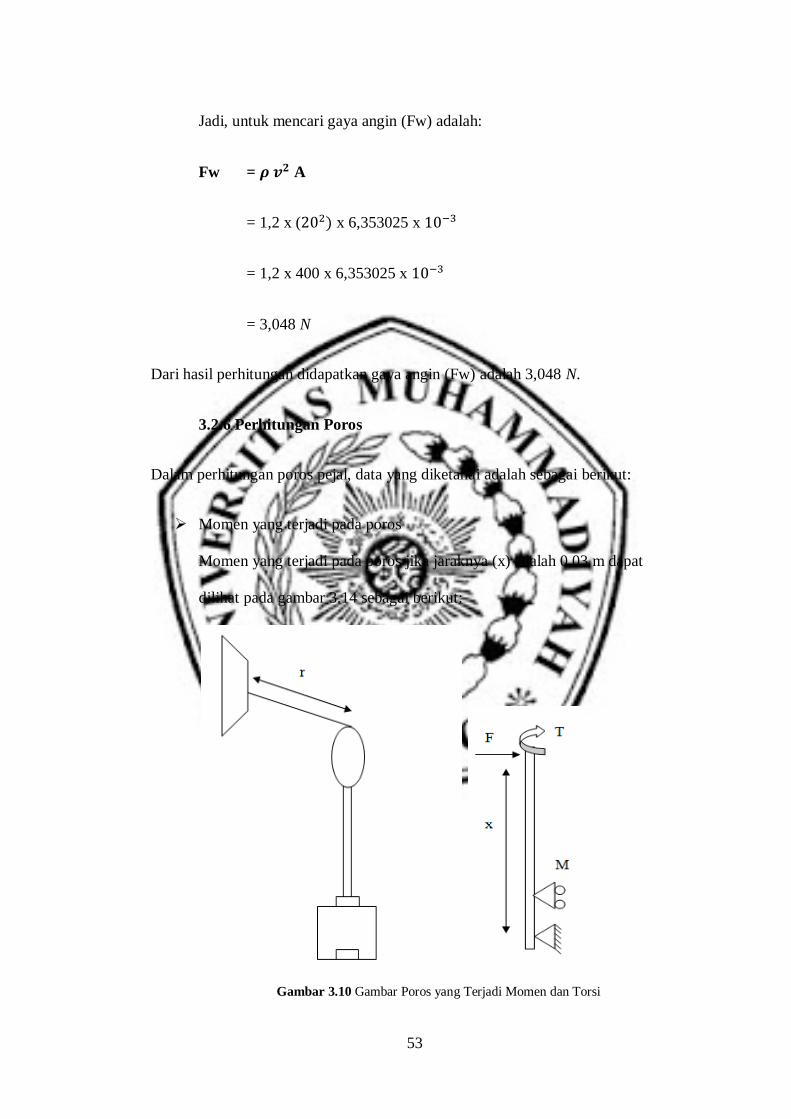
3.2.6 Perhitungan Poros
Dalam perhitungan poros pejal, data yang diketahui adalah sebagai berikut:
Momen yang terjadi pada poros
Momen yang terjadi pada poros jika jaraknya (x) adalah 0,03 m dapat
dilihat pada gambar 3.14 sebagai berikut:
Gambar 3.10 Gambar Poros yang Terjadi Momen dan Torsi
54
M = 0
M = F . x ; F adalah gaya angin (3.8)
M = 3,048 N x 0,03 m
= 0,0914 N-m
Jika diketahui vektor dari axis putaran ke titik dimana gaya bekerja
(r), jarak r nilainya adalah 0,075 m maka torsi yang terjadi pada poros
menggunakan persamaan sebagai berikut:
T = F . r (3.9)
= 3,048 N x 0,075 m
= 0,2286 N-m
Equivalent Twisting Moment (Te) adalah sebagai berikut:
Te = √𝑴𝒂𝟐 + 𝑻𝟐 (3.10)
= √(0,0914)2 + (0,2286)2
= √0,06061192
= 0,2426 N-m = 0,0251 Kg-m = 25,1 Kg-mm
Dalam perencanaan poros bahan yang digunakan adalah Baja
karbon konstruksi mesin tipe (JIS G4501) S30C, Jika diketahui tegangan
geser (𝝉) yang diasumsikan adalah ½ dari tegangan tarik. Tegangan
tariknya adalah 48 Kg-mm (Sularso, 2004). Maka untuk menentukan
diameter poros jika ditinjau dari (Te) sebagai berikut:
Te = 𝝅
𝟏𝟔 𝒙 𝝉 𝒙 𝒅𝟑 (3.11)
25,1 = 3,14/16 x 24 x 𝑑3
𝑑3 = 25,1 x 16
3,14 𝑥 24
𝑑3 = 5,329
55
d = 1,75 mm ≈ 𝑑 = 2 𝑚𝑚
∴ Jadi diameter porosnya adalah 2 mm
3.2.7 Desain Box Elekronika
Box elektonika terdiri dari mikrokontroler Arduino dan rangkaian
kabel sensor. Dibagian box belakang terdapat 2 lampu warna hijau dan
biru sebagai indikator lampu Rx dan Tx. Lampu yang digunakan sebagai
indikator adalah lampu LED. LED atau Light Emitting Diode, adalah salah
satu jenis dioda maka LED memiliki dua kutub yaitu anoda dan katoda.
Dalam hal ini LED akan menyala bila ada arus listrik mengalir dari anoda
menuju katoda (Yudi, 2015). Apabila arus yang mengalir melebihi 20 mA
maka LED akan terbakar, oleh karena diperlukan resistor yang digunakan
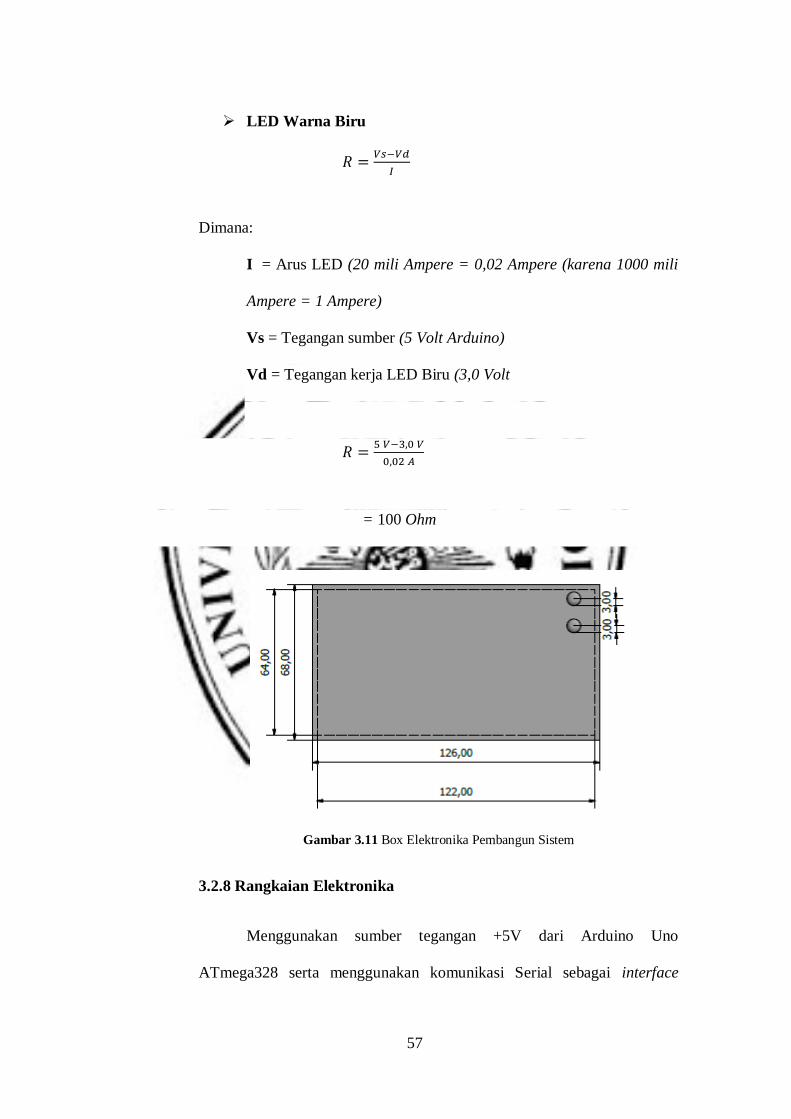
sebagai penghambat arus. Desain box dapat dilihat pada gambar 3.11 di
bawah ini. Tegangan kerja atau voltage yang terjadi pada sebuah LED
berbeda-beda, menurut warna yang dihasilkan adalah sebagai berikut:
a. Infra merah : 1,6 V
b. Merah : 1,8 V – 2,1 V
c. Oranye : 2,2 V
d. Kuning : 2,4 V
e. Hijau : 2,6 V
f. Biru : 3,0 V – 3,5 V
g. Putih : 3,0 – 3,6 V
h. Ultraviolet : 3,5 V
56
Mengacu data di atas, maka Apabila ingin mencari nilai resistor
pada LED dapat digunakan rumus berikut:
𝑹 =𝑽𝒔−𝑽𝒅
𝑰 (3.12)
(Yudi, 2015).
Keterangan:
R = Resistor (Ohm)
I = Arus LED (A)
Vs = Tegangan sumber (5 Volt Arduino)
Vd = Tegangan kerja LED (volt)
Resistor yang digunakan lampu LED adalah:
LED Warna Hijau
𝑅 =𝑉𝑠−𝑉𝑑
𝐼
Dimana:
I = Arus LED (20 mili Ampere = 0,02 Ampere (karena 1000 mili
Ampere = 1 Ampere)
Vs = Tegangan sumber (5 Volt Arduino)
Vd = Tegangan kerja LED Biru (2,6 Volt)
𝑅 =5 𝑉−2,6 𝑉
0,02 𝐴
= 120 Ohm
57
LED Warna Biru
𝑅 =𝑉𝑠−𝑉𝑑
𝐼
Dimana:
I = Arus LED (20 mili Ampere = 0,02 Ampere (karena 1000 mili
Ampere = 1 Ampere)
Vs = Tegangan sumber (5 Volt Arduino)
Vd = Tegangan kerja LED Biru (3,0 Volt
𝑅 =5 𝑉−3,0 𝑉
0,02 𝐴
= 100 Ohm
Gambar 3.11 Box Elektronika Pembangun Sistem
3.2.8 Rangkaian Elektronika
Menggunakan sumber tegangan +5V dari Arduino Uno
ATmega328 serta menggunakan komunikasi Serial sebagai interface
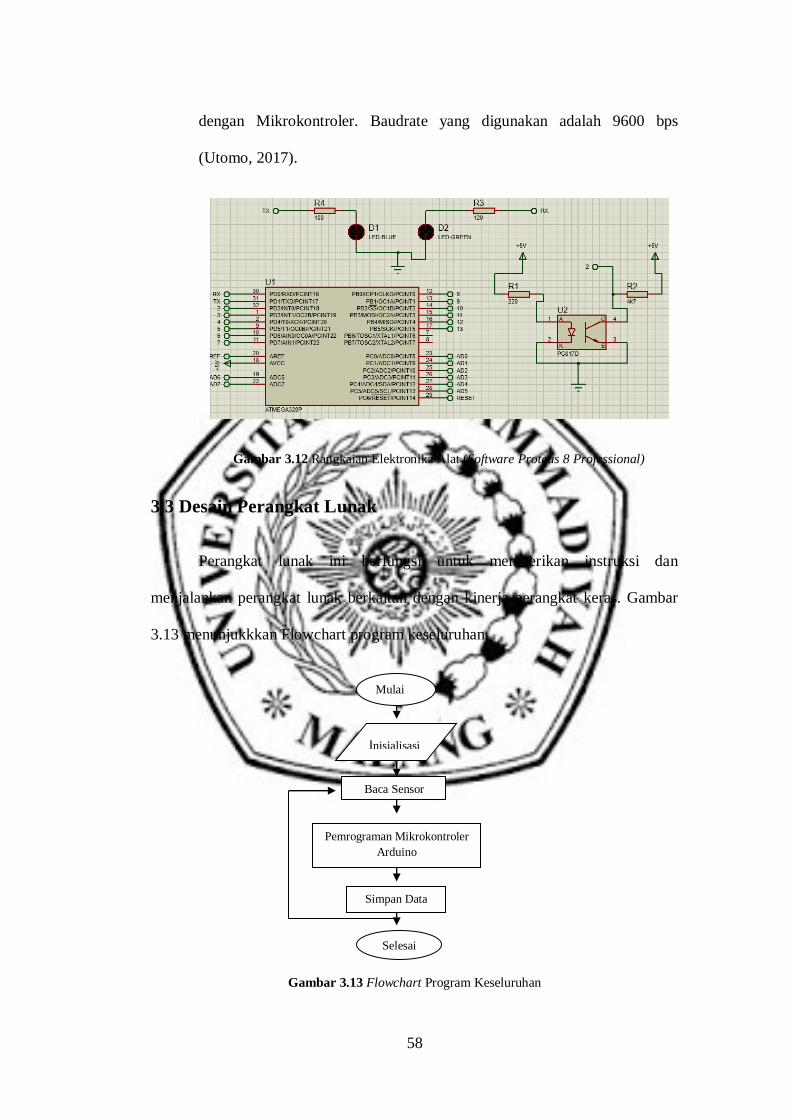
58
dengan Mikrokontroler. Baudrate yang digunakan adalah 9600 bps
(Utomo, 2017).
Gambar 3.12 Rangkaian Elektronika Alat (Software Proteus 8 Professional)
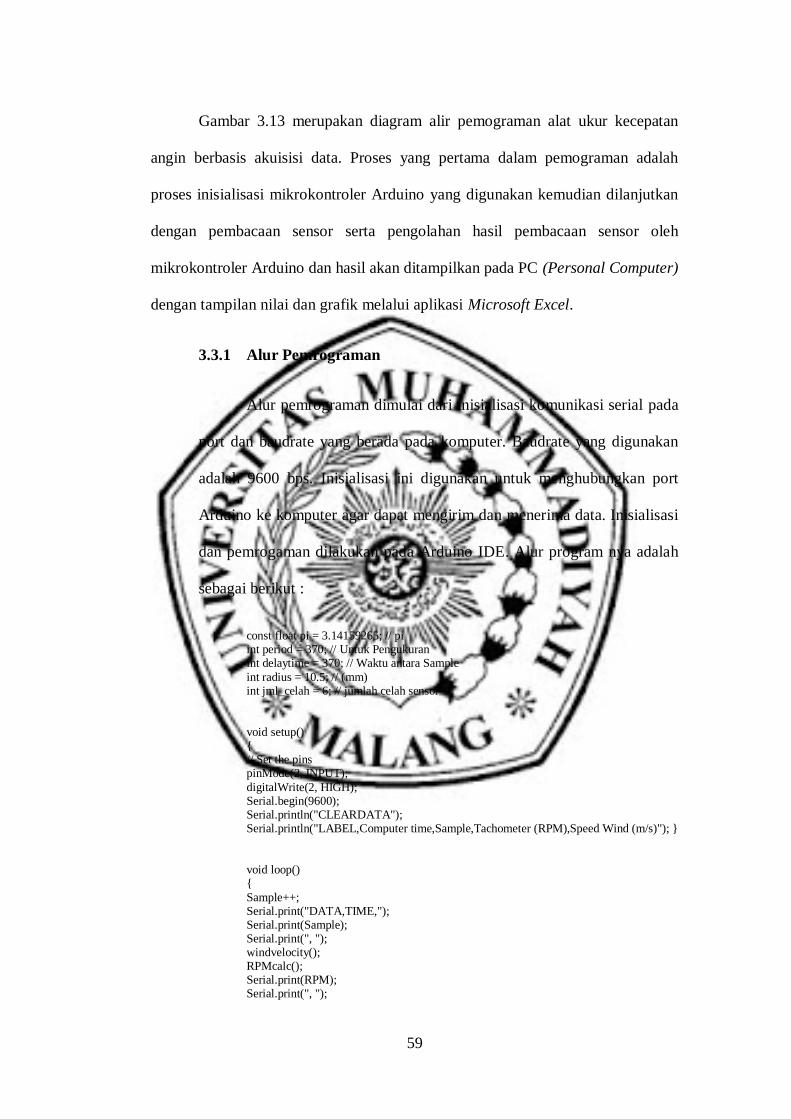
3.3 Desain Perangkat Lunak
Perangkat lunak ini berfungsi untuk memberikan instruksi dan
menjalankan perangkat lunak berkaitan dengan kinerja perangkat keras. Gambar
3.13 menunjukkkan Flowchart program keseluruhan.
Gambar 3.13 Flowchart Program Keseluruhan
Mulai
Inisialisasi
Baca Sensor
Pemrograman Mikrokontroler
Arduino
Simpan Data
Selesai
59
Gambar 3.13 merupakan diagram alir pemograman alat ukur kecepatan
angin berbasis akuisisi data. Proses yang pertama dalam pemograman adalah
proses inisialisasi mikrokontroler Arduino yang digunakan kemudian dilanjutkan
dengan pembacaan sensor serta pengolahan hasil pembacaan sensor oleh
mikrokontroler Arduino dan hasil akan ditampilkan pada PC (Personal Computer)
dengan tampilan nilai dan grafik melalui aplikasi Microsoft Excel.
3.3.1 Alur Pemrograman
Alur pemrograman dimulai dari inisialisasi komunikasi serial pada
port dan baudrate yang berada pada komputer. Baudrate yang digunakan
adalah 9600 bps. Inisialisasi ini digunakan untuk menghubungkan port
Arduino ke komputer agar dapat mengirim dan menerima data. Inisialisasi
dan pemrogaman dilakukan pada Arduino IDE. Alur program nya adalah
sebagai berikut :
const float pi = 3.14159265; // pi int period = 370; // Untuk Pengukuran int delaytime = 370; // Waktu antara Sample
int radius = 10.5; // (mm) int jml_celah = 6; // jumlah celah sensor
void setup() { // Set the pins pinMode(2, INPUT);
digitalWrite(2, HIGH); Serial.begin(9600); Serial.println("CLEARDATA"); Serial.println("LABEL,Computer time,Sample,Tachometer (RPM),Speed Wind (m/s)"); } void loop() {
Sample++; Serial.print("DATA,TIME,"); Serial.print(Sample); Serial.print(", "); windvelocity(); RPMcalc(); Serial.print(RPM); Serial.print(", ");
60
WindSpeed(); Serial.print(speedwind);
Serial.println(); }
void windvelocity() { speedwind = 0; counter = 0; attachInterrupt(0, addcount, CHANGE);
unsigned long millis(); long startTime = millis(); while(millis() < startTime + period) {} detachInterrupt(1); }
void RPMcalc() {
RPM=((counter/jml_celah)*60); // (RPM) } void WindSpeed() { speedwind = ((2 * pi * radio * ((counter/jml_celah)*60)) / 60) / 1000; // Calculate speed
on m/s }
void addcount() { counter++; }
Dari program diatas dapat dijelaskan bahwa pembuatan program
diawali dengan beberapa bagian yaitu:
1. Definisi
Bagian ini digunakan untuk mendefinisikan angka-angka
dari setiap istilah seperti; pi, periode, delaytime, radius,
jumlah celah. Pemberian angka ini disesuaikan dengan
ukuran ukuran alat dan rumus.
2. Definisi Variabel
Bagian ini digunakan untuk menuliskan variabel-variabel
yang akan di ukur.
61
3. Void setup ()
Bagian ini digunakan dan dipanggil satu kali ketika
program pertama kali dijalankan. Fungsi setup digunakan
untuk mendefinisikan mode pin atau melalui komunikasi
serial. Fungsi setup() harus disertakan dalam program
walaupun tidak ada statement yang dijalankan.
4. Void loop()
Setelah fungsi setup() maka program secara otomatis akan
melakukan fungsi loop() secara berurutan dan melakukan
instruksi-instruksi yang ada dalam fungsi loop(). Instruksi
setelah void loop itu termasuk void yang berada di bawah
nya void loop. Pada bagian ini yang digunakan untuk
pembacaan sensor dengan sample yang berulang-ulang.
5. Proses Verify dan Upload Program
Proses verify merupakan proses pengecekan program, jika
ada program yang salah maka secara otomatis proses akan
menunjukkan error dan perlu perbaikan program. Proses
Upload merupakan proses setelah program terverify untuk
diupload pada port Arduino Uno ATmega328.
3.3.2 Pengukuran Anemometer
Pengolahan data dari pengukuran ini yaitu untuk mengetahui
persen kesalahan, ketepatan (accuracy) dan ketelitian (precision) dalam
pengukuran, untuk mengetahui hal tersebut dari alat ukur hal pertama yang
62
harus di cari yaitu persen kesalahan, rumus dari persen kesalahan dapat
dilihat pada persamaan 3.5:
(%) error = 𝒀𝒏−𝑿𝒏
𝒀𝒏 𝒙 𝟏𝟎𝟎% (3.13)
dimana : Yn = Nilai alat ukur standar, dan
Xn = Nilai terbaca pada Anemometer yang dibuat
Hasil pengukuran dinyatakan dalam 𝑿 ± 𝐒𝐃 kemudian dapat
ditentukan nilai rata-rata, standar deviasi, akurasi dan presisi serta
pelaporan hasil pengukuran. Nilai rata-rata pengukuran dinyatakan dengan
Persamaan 3.6:
𝑿 ̅= 𝟏
𝒏∑ 𝑿𝒏𝒏
𝒏=𝟏 (3.14)
Xn adalah nilai dari data ke-n dan n adalah jumlah total
pengukuran. Presisi (% R) dari pengukuran dapat diekspresikan dalam
bentuk matematika pada Persamaan 3.7:
(%) R = 𝑯𝒂𝒔𝒊𝒍 𝑷𝒆𝒏𝒈𝒖𝒌𝒖𝒓𝒂𝒏 (𝑺𝒕𝒂𝒏𝒅𝒂𝒓)
𝑯𝒂𝒔𝒊𝒍 𝑷𝒆𝒏𝒈𝒖𝒌𝒖𝒓𝒂𝒏 (𝑨𝒍𝒂𝒕 𝑼𝒌𝒖𝒓) x 100 % (3.15)
Xn adalah nilai dari data ke-n dan n adalah jumlah total
pengukuran.Untuk mengukur Standar Deviasi (SD) dapat digunakan
Persamaan 3.8:
𝑺𝑫 = √𝒏 ∑ 𝒙𝒊
𝟐−(∑ 𝒙𝒊)𝟐
𝒏(𝒏−𝟏) (3.16)
63
Dari hasil pengukuran dapat dilihat seberapa besar Precision
pengukuran. Presisi biasanya dinyatakan dalam nilai Koefisien Variasi (%
KV) Persamaan 3.9:
(%)𝑲𝑽 = 𝑺𝑫
𝑿 ̅ x 100% (3.17)
(Nurfitriza, dkk, 2015).
3.4 Proses Pengerjaan
3.4.1 Alat yang Digunakan
1. Anemometer Wine Speed Air Velocity
2. Solder
3. Lem Tembak
4. Lem G
5. Obeng (-) & (+)
6. Tang
7. Kunci Pas 6 mm
8. Gunting
9. Bor
10. Gergaji Besi
11. Cutter
3.4.2 Bahan yang Digunakan
1. Sensor Optocoupler : 1 buah
2. Arduino Uno ATmega328 : 1 buah
64
3. Kabel Serial : 1 buah
4. Kabel Jumper (male and female) : 3 buah
5. Lampu LED (biru dan hijau) : 1 buah
6. Timah : 1 m
7. Isi Lem Tembak : 3 buah
8. Akrilik Bening : 10 m x 20 m
9. Penyangga dan pengarah angin : 1 buah
10. Pipa PVC ½ inch : 1 rol
11. Sambungan Pipa PVC : 1 buah
12. Pelat Alumunium Penyangga : 1 buah
13. Dinamo DC : 1 buah
14. Alumunium batangan : 1 buah
15. Baut Pacer : 5 buah
16. Baut 6 mm : 7 buah
17. Box Rangkaian Arduino : 1 buah
3.4.3 Proses Mekanik Alat
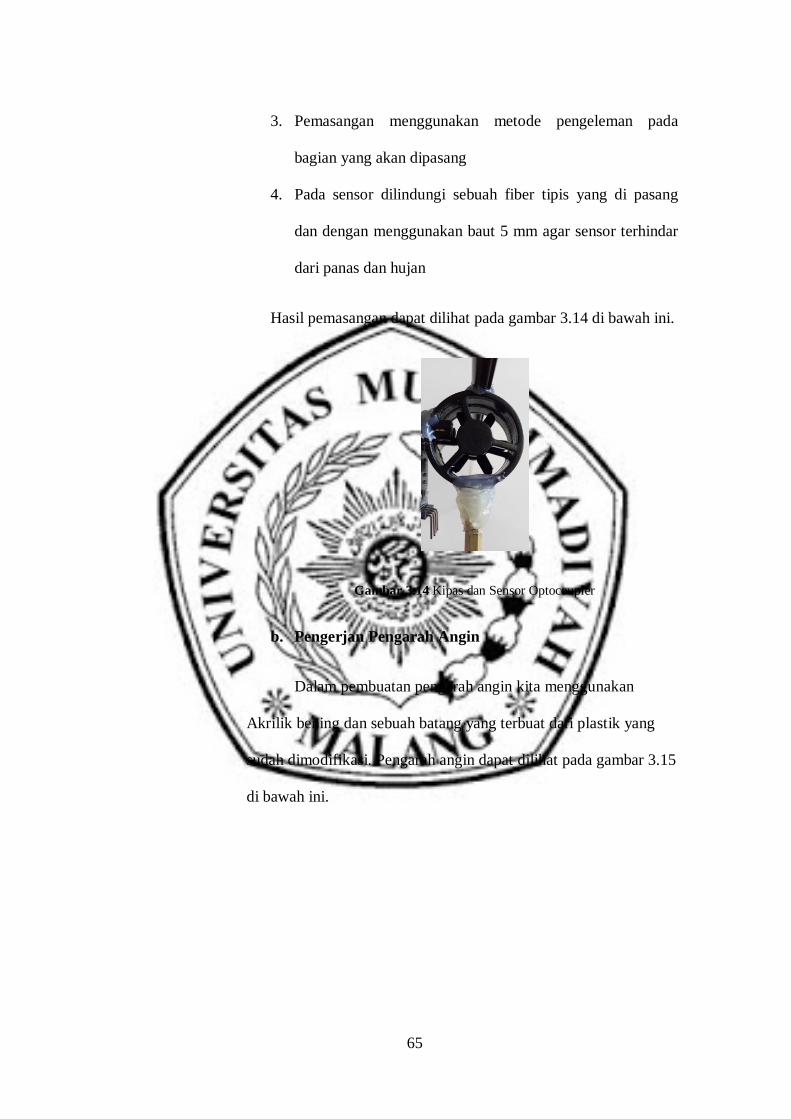
a. Pengerjan Kipas dan Sensor
Pengerjaan kipas dan sensor ini meliputi hal-hal sebagai
berikut:
1. Kipas yang digunakan adalah kipas dari Anemometer Wind
Speed Air Velocity
2. Sensor Optocoupler dipasang pada bagian kipas dengan
posisi sensor menghadap vertikal ke atas
65
3. Pemasangan menggunakan metode pengeleman pada
bagian yang akan dipasang
4. Pada sensor dilindungi sebuah fiber tipis yang di pasang
dan dengan menggunakan baut 5 mm agar sensor terhindar
dari panas dan hujan
Hasil pemasangan dapat dilihat pada gambar 3.14 di bawah ini.
Gambar 3.14 Kipas dan Sensor Optocoupler
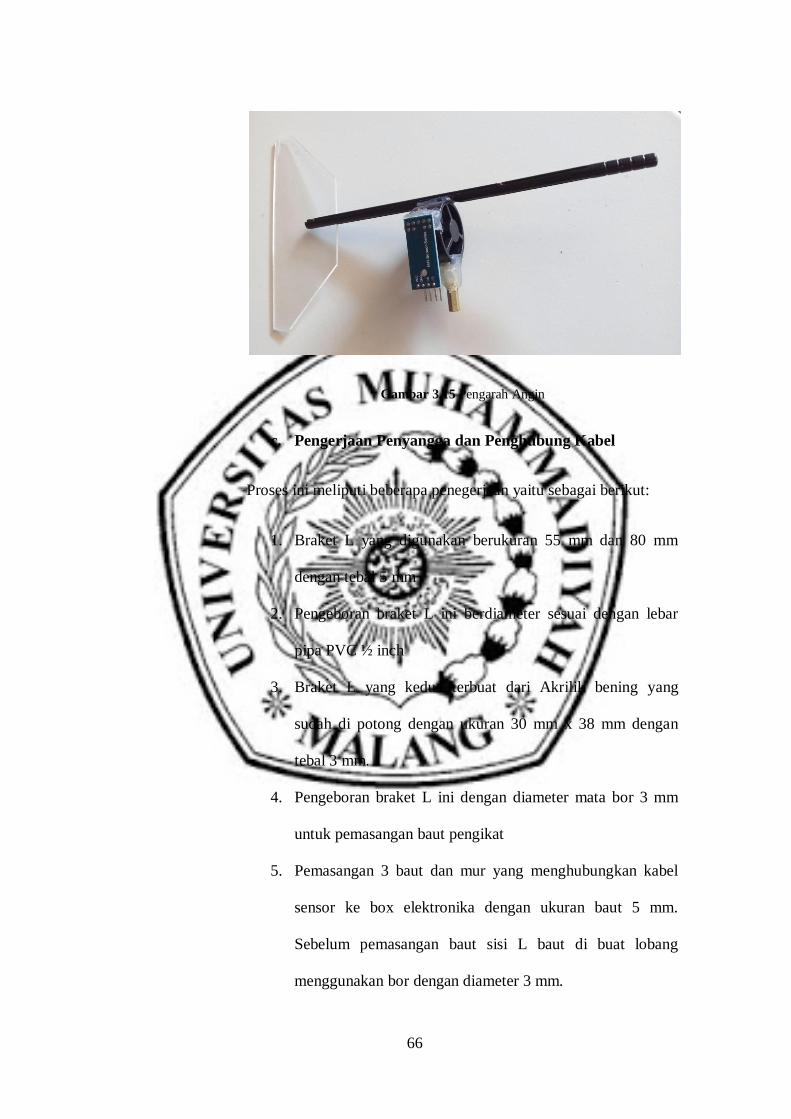
b. Pengerjan Pengarah Angin
Dalam pembuatan pengarah angin kita menggunakan
Akrilik bening dan sebuah batang yang terbuat dari plastik yang
sudah dimodifikasi. Pengarah angin dapat dilihat pada gambar 3.15
di bawah ini.
66
Gambar 3.15 Pengarah Angin
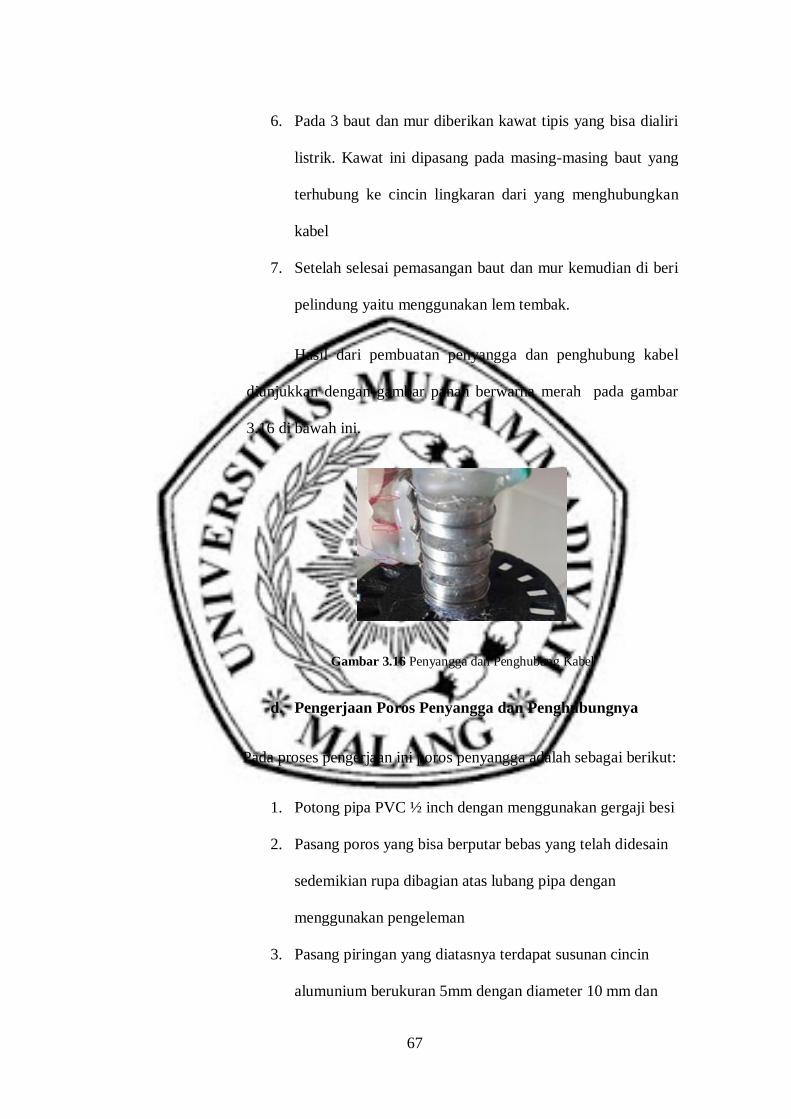
c. Pengerjaan Penyangga dan Penghubung Kabel
Proses ini meliputi beberapa penegerjaan yaitu sebagai berikut:
1. Braket L yang digunakan berukuran 55 mm dan 80 mm
dengan tebal 5 mm
2. Pengeboran braket L ini berdiameter sesuai dengan lebar
pipa PVC ½ inch
3. Braket L yang kedua terbuat dari Akrilik bening yang
sudah di potong dengan ukuran 30 mm x 38 mm dengan
tebal 3 mm.
4. Pengeboran braket L ini dengan diameter mata bor 3 mm
untuk pemasangan baut pengikat
5. Pemasangan 3 baut dan mur yang menghubungkan kabel
sensor ke box elektronika dengan ukuran baut 5 mm.
Sebelum pemasangan baut sisi L baut di buat lobang
menggunakan bor dengan diameter 3 mm.
67
6. Pada 3 baut dan mur diberikan kawat tipis yang bisa dialiri
listrik. Kawat ini dipasang pada masing-masing baut yang
terhubung ke cincin lingkaran dari yang menghubungkan
kabel
7. Setelah selesai pemasangan baut dan mur kemudian di beri
pelindung yaitu menggunakan lem tembak.
Hasil dari pembuatan penyangga dan penghubung kabel
diunjukkan dengan gambar panah berwarna merah pada gambar
3.16 di bawah ini.
Gambar 3.16 Penyangga dan Penghubung Kabel
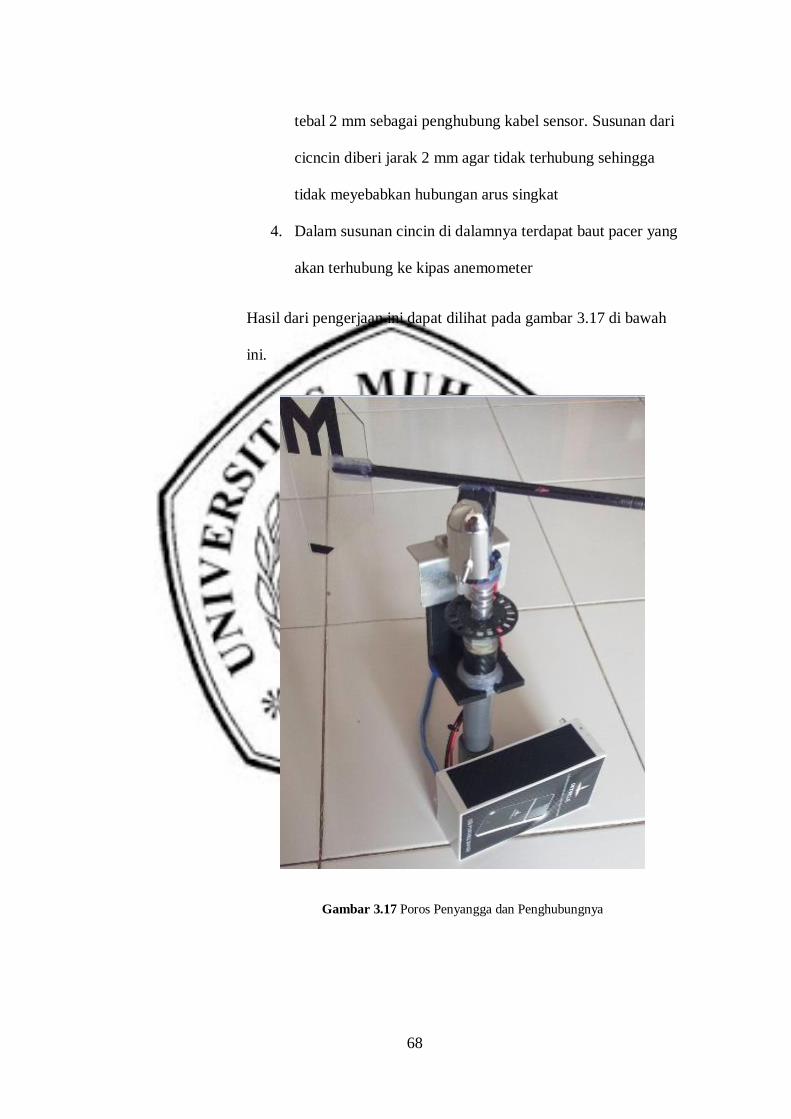
d. Pengerjaan Poros Penyangga dan Penghubungnya
Pada proses pengerjaan ini poros penyangga adalah sebagai berikut:
1. Potong pipa PVC ½ inch dengan menggunakan gergaji besi
2. Pasang poros yang bisa berputar bebas yang telah didesain
sedemikian rupa dibagian atas lubang pipa dengan
menggunakan pengeleman
3. Pasang piringan yang diatasnya terdapat susunan cincin
alumunium berukuran 5mm dengan diameter 10 mm dan
68
tebal 2 mm sebagai penghubung kabel sensor. Susunan dari
cicncin diberi jarak 2 mm agar tidak terhubung sehingga
tidak meyebabkan hubungan arus singkat
4. Dalam susunan cincin di dalamnya terdapat baut pacer yang
akan terhubung ke kipas anemometer
Hasil dari pengerjaan ini dapat dilihat pada gambar 3.17 di bawah
ini.
Gambar 3.17 Poros Penyangga dan Penghubungnya
69
e. Proses Pengerjaan Box Elektronika
Box elektronika ini menggunakan bahan dari plastik tebal
dan kaku dengan ketebalan 2 mm. Box ini bisa dilepas dan
dipasang kembali karena memiliki tutup. Di dalam box terdapatt
rangkaian elektonika yang terdiri dari port Arduino Uno
ATmega328, kabel serial, kabel Sensor dan kabel lampu serta
rangkaian elektonika lainnya. Pemasangan Arduino dan lampu
adalah sebagai berikut:
1. Siapkan 4 baut pacer berukuran 5 mm, dan pembuatan
lubang pada box ada 6 lubang. Lubang yang berjumlang 4
di bor pada posisi persegi sesuai lubang baut yang terdapat
pada Arduino. Untuk 2 lubang selanjutnya digunakan
sebagai lubang lampu Rx dan Tx. Lubang pada box ini
berukuran 3 mm.
2. Selanjutnya lubang kabel serial dan kabel sensor sebesar 12
mm berjumlah 1 buah
3. Pemasangan port Arduino penempatannya sesuai dengan 4
baut tadi, karena menyesuaikan lubang baut yang dimiliki
port Arduino.
4. Memasang lampu LED pada 2 lubang serta rangkaian kabel
beserta resistornya
5. Kabel sensor yang berjumlah 3 dihubungkan masing-
masing pada pin 2 I/O sebagai Digital Output, pin 5 v dan
pin GND.
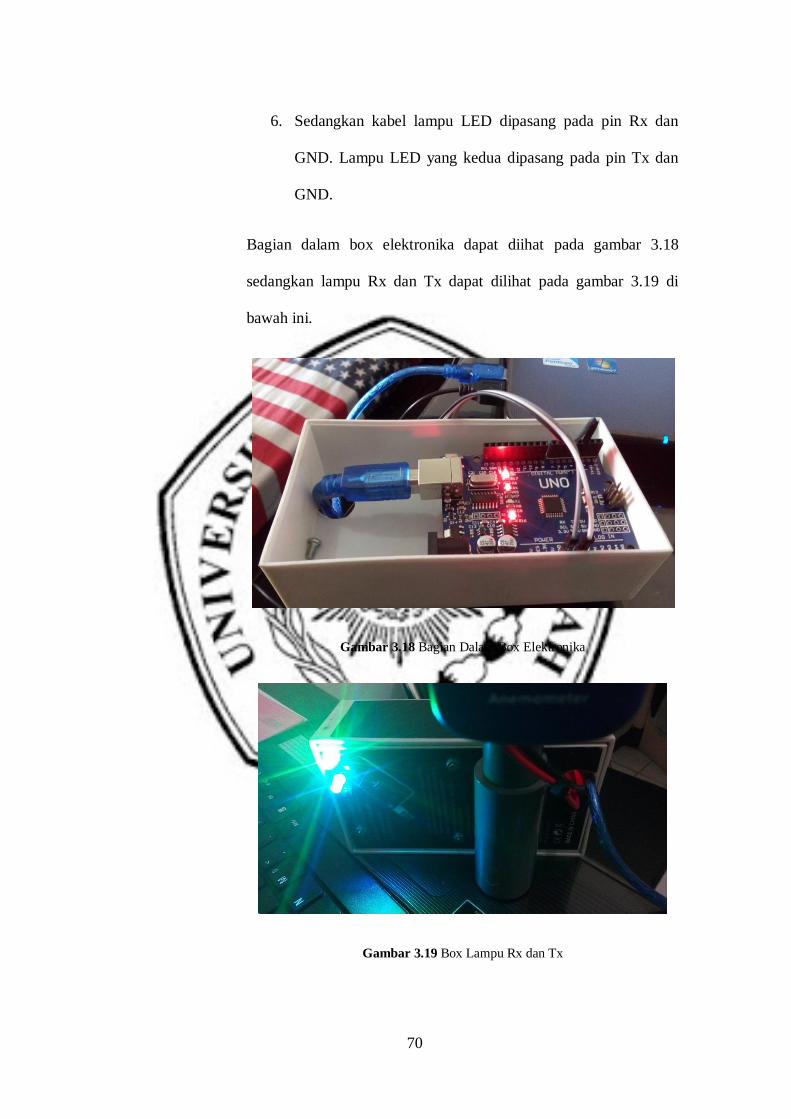
70
6. Sedangkan kabel lampu LED dipasang pada pin Rx dan
GND. Lampu LED yang kedua dipasang pada pin Tx dan
GND.
Bagian dalam box elektronika dapat diihat pada gambar 3.18
sedangkan lampu Rx dan Tx dapat dilihat pada gambar 3.19 di
bawah ini.
Gambar 3.18 Bagian Dalam Box Elektronika
Gambar 3.19 Box Lampu Rx dan Tx
71
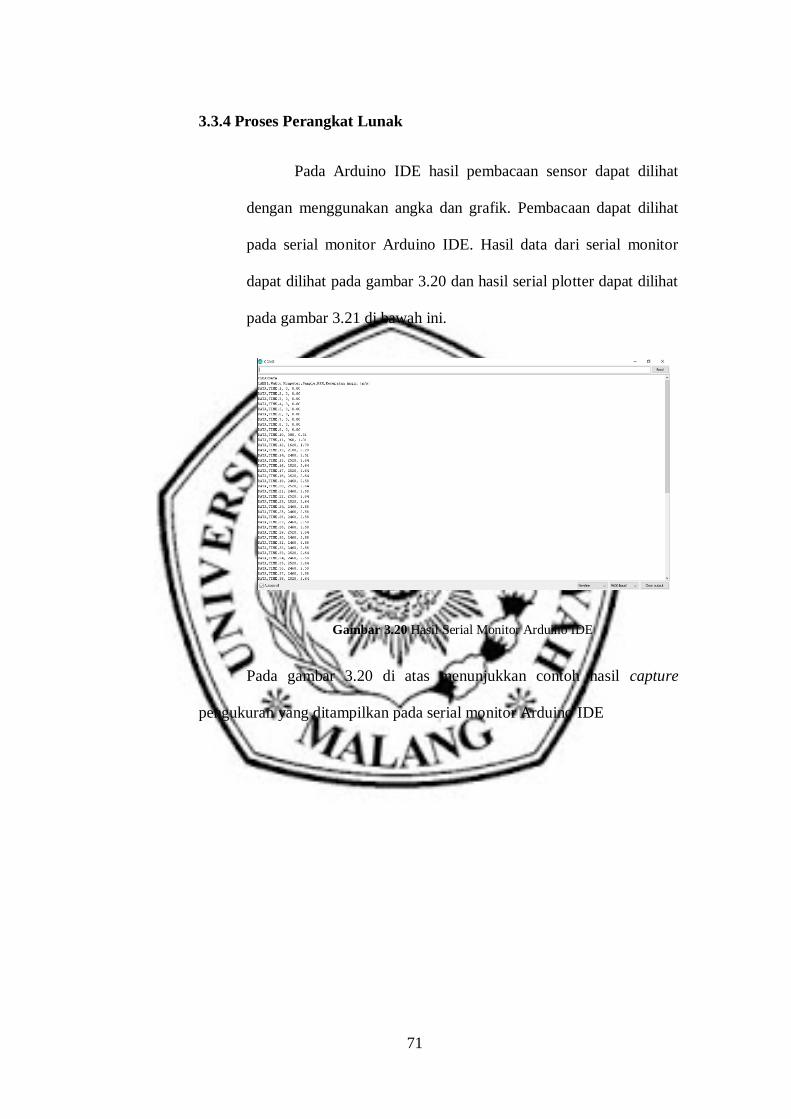
3.3.4 Proses Perangkat Lunak
Pada Arduino IDE hasil pembacaan sensor dapat dilihat
dengan menggunakan angka dan grafik. Pembacaan dapat dilihat
pada serial monitor Arduino IDE. Hasil data dari serial monitor
dapat dilihat pada gambar 3.20 dan hasil serial plotter dapat dilihat
pada gambar 3.21 di bawah ini.
Gambar 3.20 Hasil Serial Monitor Arduino IDE
Pada gambar 3.20 di atas menunjukkan contoh hasil capture
pengukuran yang ditampilkan pada serial monitor Arduino IDE
72
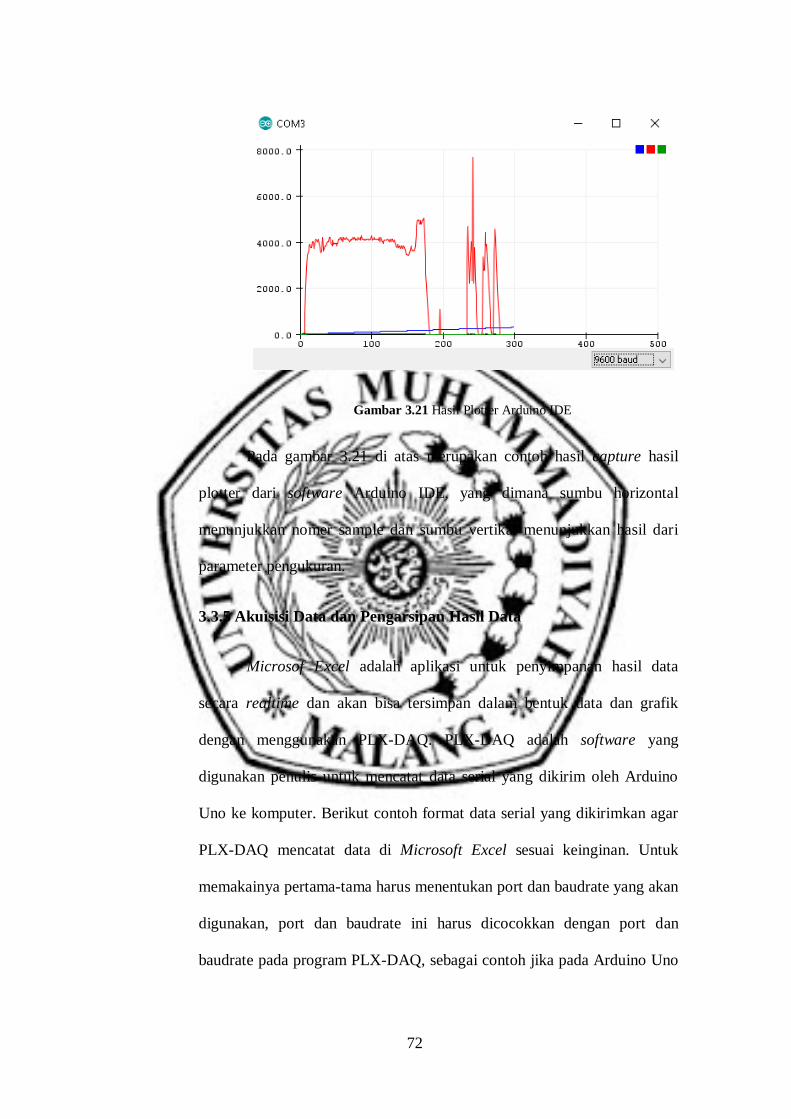
Gambar 3.21 Hasil Plotter Arduino IDE
Pada gambar 3.21 di atas merupakan contoh hasil capture hasil
plotter dari software Arduino IDE, yang dimana sumbu horizontal
menunjukkan nomer sample dan sumbu vertikal menunjukkan hasil dari
parameter pengukuran.
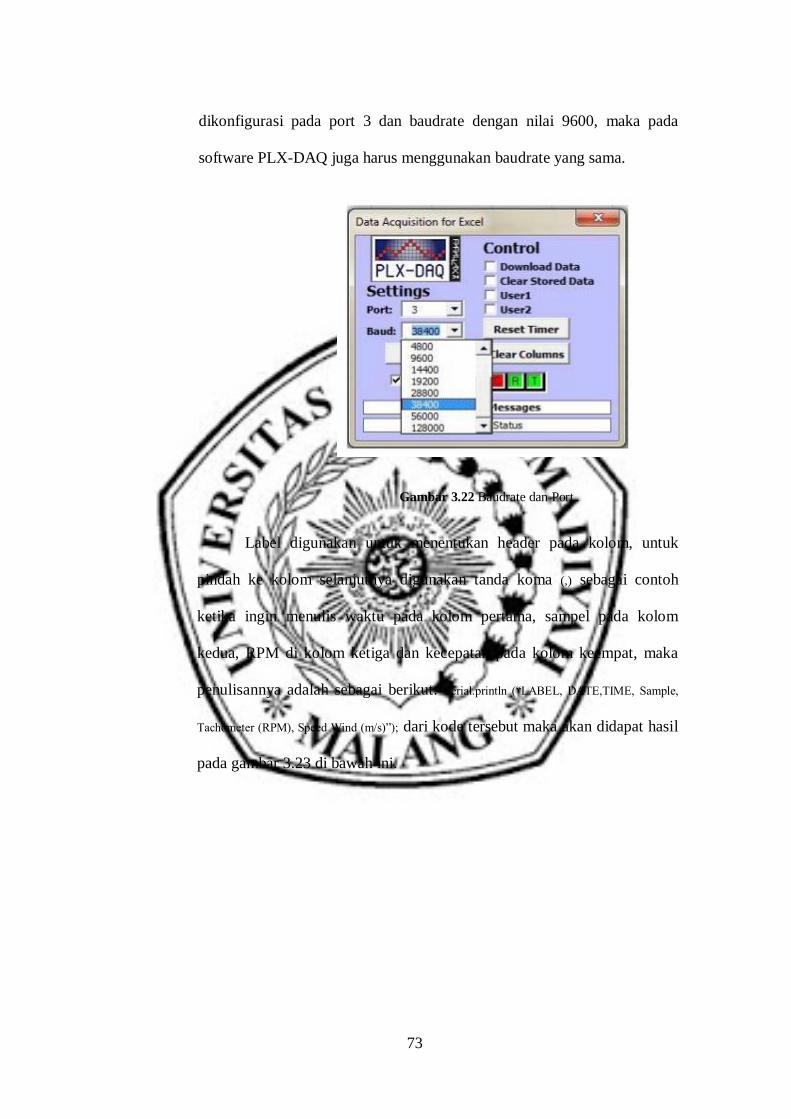
3.3.5 Akuisisi Data dan Pengarsipan Hasil Data
Microsof Excel adalah aplikasi untuk penyimpanan hasil data
secara realtime dan akan bisa tersimpan dalam bentuk data dan grafik
dengan menggunakan PLX-DAQ. PLX-DAQ adalah software yang
digunakan penulis untuk mencatat data serial yang dikirim oleh Arduino
Uno ke komputer. Berikut contoh format data serial yang dikirimkan agar
PLX-DAQ mencatat data di Microsoft Excel sesuai keinginan. Untuk
memakainya pertama-tama harus menentukan port dan baudrate yang akan
digunakan, port dan baudrate ini harus dicocokkan dengan port dan
baudrate pada program PLX-DAQ, sebagai contoh jika pada Arduino Uno
73
dikonfigurasi pada port 3 dan baudrate dengan nilai 9600, maka pada
software PLX-DAQ juga harus menggunakan baudrate yang sama.
Gambar 3.22 Baudrate dan Port
Label digunakan untuk menentukan header pada kolom, untuk
pindah ke kolom selanjutnya digunakan tanda koma (,) sebagai contoh
ketika ingin menulis waktu pada kolom pertama, sampel pada kolom
kedua, RPM di kolom ketiga dan kecepatan pada kolom keempat, maka
penulisannya adalah sebagai berikut: Serial.println (“LABEL, DATE,TIME, Sample,
Tachometer (RPM), Speed Wind (m/s)”); dari kode tersebut maka akan didapat hasil
pada gambar 3.23 di bawah ini.
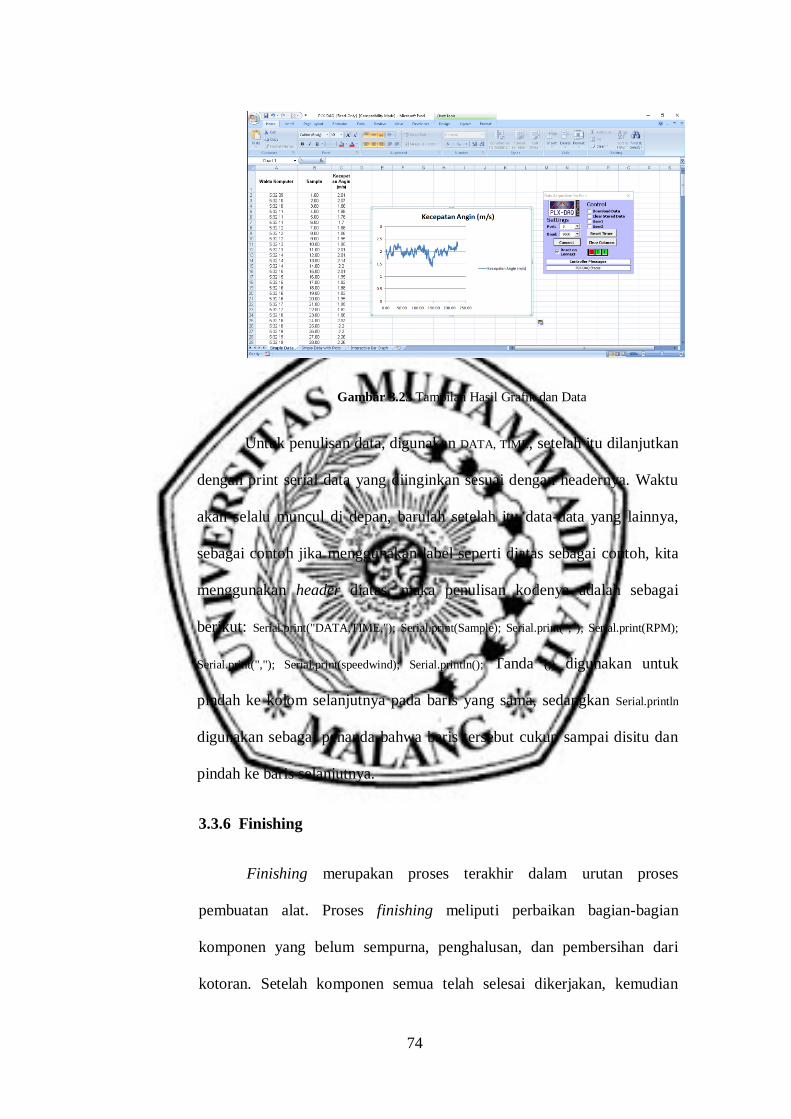
74
Gambar 3.23 Tampilan Hasil Grafik dan Data
Untuk penulisan data, digunakan DATA, TIME, setelah itu dilanjutkan
dengan print serial data yang diinginkan sesuai dengan headernya. Waktu
akan selalu muncul di depan, barulah setelah itu data-data yang lainnya,
sebagai contoh jika menggunakan label seperti diatas sebagai contoh, kita
menggunakan header diatas, maka penulisan kodenya adalah sebagai
berikut: Serial.print("DATA,TIME,"); Serial.print(Sample); Serial.print(","); Serial.print(RPM);
Serial.print(","); Serial.print(speedwind); Serial.println(); Tanda (,) digunakan untuk
pindah ke kolom selanjutnya pada baris yang sama, sedangkan Serial.println
digunakan sebagai penanda bahwa baris tersebut cukup sampai disitu dan
pindah ke baris selanjutnya.
3.3.6 Finishing
Finishing merupakan proses terakhir dalam urutan proses
pembuatan alat. Proses finishing meliputi perbaikan bagian-bagian
komponen yang belum sempurna, penghalusan, dan pembersihan dari
kotoran. Setelah komponen semua telah selesai dikerjakan, kemudian
75
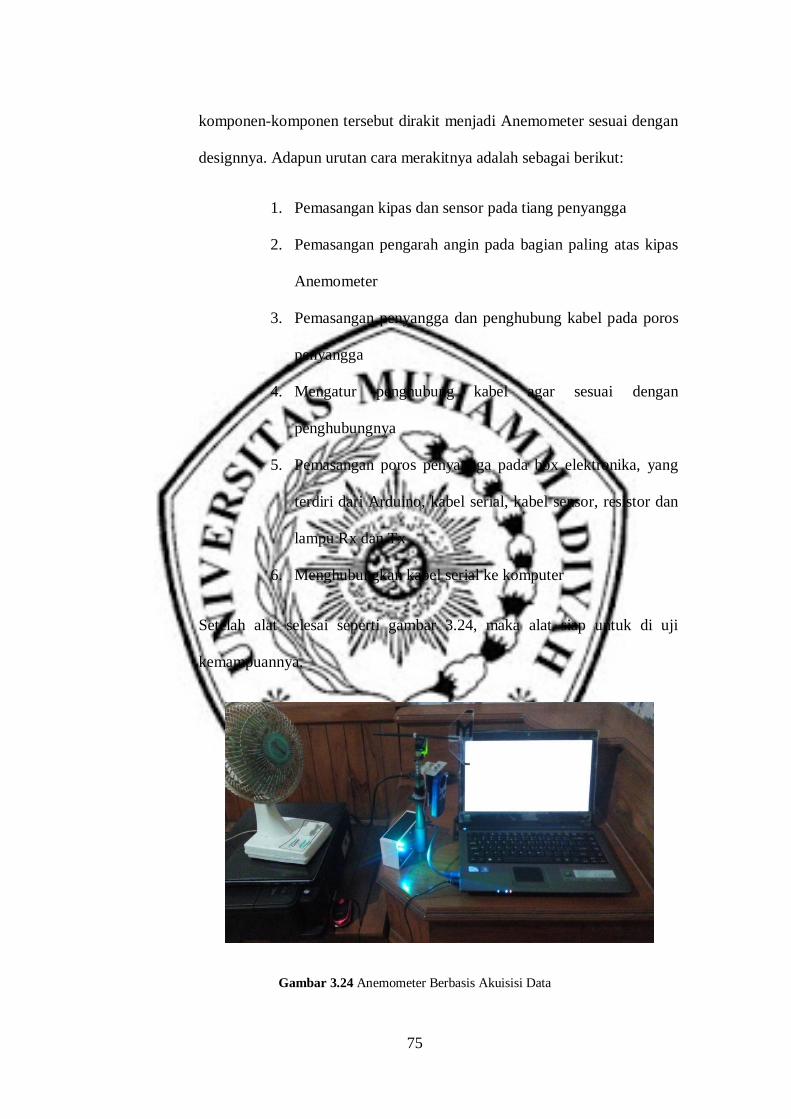
komponen-komponen tersebut dirakit menjadi Anemometer sesuai dengan
designnya. Adapun urutan cara merakitnya adalah sebagai berikut:
1. Pemasangan kipas dan sensor pada tiang penyangga
2. Pemasangan pengarah angin pada bagian paling atas kipas
Anemometer
3. Pemasangan penyangga dan penghubung kabel pada poros
penyangga
4. Mengatur penghubung kabel agar sesuai dengan
penghubungnya
5. Pemasangan poros penyannga pada box elektronika, yang
terdiri dari Arduino, kabel serial, kabel sensor, resistor dan
lampu Rx dan Tx
6. Menghubungkan kabel serial ke komputer
Setelah alat selesai seperti gambar 3.24, maka alat siap untuk di uji
kemampuannya.
Gambar 3.24 Anemometer Berbasis Akuisisi Data