-v-b t»»*-
TRANSCRIPT

IVi a-v- B\\PERPUSTAKAA
t»»*-'LAPORAN Tl GAS AKHIR
KENDALI KECEPATAN MOTOR UNIVERSAL DENGAN
MENGGUNAKAN TRIAC
\2&jJfitfd**r~Vi(
IM/lti/J
Harga -j^r
UNIVE^SI'^S imam INDONESIAVQGYft<A8FA
OLEH:
MUH. HARIS MASYHUDI
( 97 524 019)
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI 1NDUSTRI
UNIVERSITAS ISLAM INDONESIA
YOGYAKARTA
2003
P/£•

Tel all
Hai
Tar
Tin
I. ir. Hi.]
-• Wahyu
1 Hendra
MILIKPERPUSTOKAAN-FTI-UII
YOGYAKARTA
LEMBAR PENGESAHAN PEMBIMBING
PENGATIRAN KECEPATAN MOTOR UNIVERSAL DENGAN
MENGGUNAKAN TRIAC
ISLAM ,,
OLEH :
NAMA MUH. HARIS MASYHUDI
No. MHS : 97 524 019
YOGYAKARTA, m.:P3
PEMBIMBING I PEMBIMBING II
/!//, '^^yL^^-^_
(Jr. Hj. Budi Astuti (Wahyudi Budi Pramono, ST)

dala KATA PENGANTAR
yanc
Alhamdulillah, Puji Allah Tuhan semesta alam. Yang Maha Pengasih
yang kasih-Nya tak pernah pilih kasih serta Maha Penyayang yang sayang-
Nya tak pernah terbilang. Ucapan syukur kehadirat-Nya akhirnya Penulis
dapat menyelesaikan Tugas Akhir ini sebagai syarat akhir untuk meraih gelar
Sarjana Teknik di jurusan Teknik Elektro Universitas Islam Indonesia.
Sholawat serta salam Penulis haturkan kepada pemimpin umat, Nabi
Muhammad SAW beserta para keluarganya, sahabatnya, dan semua
umatnya yang tetap sedia menjalankan ajaran Islam. Semoga kita termasuk
di dalamnya. Amin.
Penyusunan Tugas Akhir dengan judul "Kendali Kecepatan motor
Universal Dengan Menggunakan Triac" tidak terlepas dari bantuan semua
pihak, baik berupa bimbingan, kritik, saran, maupun doa. Tugas Akhir ini
adalah langkah pertama dari sekian ribu langkah menuju kesempurnaan
maka dari itu sangat diharapkan ada teman dan adik-adik Penulis yang
meneruskan apa yang sudah Penulis lakukan hingga tahap ini. Untuk itu,
A
5
6
7.
8.
memb

Akhir kata, semoga Pembaca bisa mendapat serta menyebarkan hal-
hal yang bermanfaat pada Laporan Tugas Akhir ini. Apabila ada kesalahan,
semata-mata kekhilafan Penulis, sedangkan kebenaran semuanya hanyalah
milik ALLAH SWT.
rL\i^_ _<S^=\C -T:<A --'_^_>\\J>_J£~-~^^U?>^^-— "—J,__S'
Yogyakarta, Agustus 2003
Penulis

ABSTRAKSI
Pada waktu ini lapangan rekayasa industri dan rumah tangga sangatlah luas,mencakup semua cabang ilmu pengetahuan dan memanfaatkan semua bentuk energi,seperti mekanis, elektris/elektronis, hidrolik, dan pneumatic. Sistem kontrol jugatelah disusun untuk berbagai aplikasi industri seperti pengontrolan kecepatan padabelt conveyor (ban berjalan) yang digunakan sebagai sarana transportasi barang antarunit produksi, selain itu dalam instalasi rumah tangga atau instalasi perkantoran yangmenggunakan lift atau escalator membutuhkan pengontrolan, seperti tegangan, daya,temperatur, tingkatan, aliran, tekanan, posisi, kecepatan, dan lainnya.Pengaturan kecepatan mi penting karena dalam suatu proses produksi, dan kitamembutuhkan bervariasinya kecepatan motor untuk berbagai keperluan.Contohnya dalam suatu alat pencampur atau mixer, apabila bahan yang akan kitacampur berupa benda padat tentu membutuhkan kecepatan yang lebih rendah apabilakita mencampur dalam bentuk cairan yang bisa menggunakan kecepatan tinggi.
Pengontrolan alat-alat atau mesin yang bekerja secara mekanis dapatdilakukan secar otomatis atau manual dengan sistem elektronik, salah satunya adalahdengan menggunakan triac. Triac digunakan untuk mengendalikan motor universal,pada prinsipnya mengatur sudut picu yang menyebabkan triac menyambung danmelewatkan tegangan yang diberikan ke motor. Triac disim berrfungsi sebagai saklarelektronis untuk mengontrol arus yang mengalir dalam muatan AC. Triac inidihidupkan oleh pulsa pertama yang cocok dalam setengah siklus positif dan tetaphidup selama setengah siklus itu. Ketika tegangan suplai jatuh ke nol, arus turun dibawah tingkat arus pokok dan triac mati.Hal yang sama terjadi pada setengah siklusnegatifnya. Urutan ini berulang terus dalam tiap siklus, dan apabila keluaran dari triacini dihubungkan pada suatu motor universal maka kecepatan motor universal akandapat diatur sesuai dengan besarnya pulsa-pulsa yang dihasilkan dari rangkaianpemicLi.
Dengan mengatur sudut picu triac maka akan berpengaruh terhadap teeganganyang diberikan pada motor universal, maka kecepatan motor universal dapat diatur.Dari hasil penelitian didapat pengendalian kecepatan motor universal dapat diaturdengan menggunakan triac, pengaturan motor mi bergantung pada jenis motor yangdigunakan.

DAFTAR IS!
1. Halaman Judul i
2. Lembar pengesahan ii
3. Kata pengantar in
4. Halaman Motto vi
5. Halaman Persembahan vii
6. Abstraksi viii
7. Daftar Isi ix
8. Daftar Gambar xi
9. Daftar Tabel xin
10. Bab I. Pendahuluan 1
1.1. Latar Belakang Masalah 1
1.2. Latar Belakang Masalah 3
1.3. Batasan Masalah 4
1.4. Tujuan Pembuatan Tugas Akhir 5
1.5. Manfaat Penelitian 5
1.6. Metode Penelitian 6
1.7. Sistematika Penulisan 7
11. Bab II. Landasan Teori 9
II. 1. Triac 9

H.2. Diac 13
11.3. Rangkaian Triac 14
11.4. Motor 18
11.4.1. Konstruksi Motor Universal 19
11.4.2. Persamaan-persamaan tegangan dan motor universal 21
11.4.3. Cara Kerja motor universal 23
11.4.4. Cara Pengendalian Motor Universal 24
12. Bab III. Perancangan Sistem 27
lll.l.Perancangan 27
111.2. Implementasi Alat 28
111.3. Blok Diagram Sistem 30
13. Bab IV. Analisadan Pembahasan 31
IV. 1. Sistem yang dirancang 31
IV.2. Cara Kerja 3]
IV.3. Hasil Penelitian 33
IV.4. Hasil Pengujian 40
14. Bab V.Penutup 4]
V.l. Kesimpulan 4]
V.2. Saran 4j
15. Daftar Pustaka 43
16. Lampiran 44

DAFTAR GAMBAR
1. Diagram Sambungan dan symbol triac 9
2. Karakteristik triac 10
3. Karakteristik triac dihubungkan dengan tegangan AC 11
4. Bagan triac dan gelombang keluarannya 12
5. Karakteristik diac 13
6. Grafik perbandingan tegangan diac, kapasitor 15
7. Rangkaian triac 16
8. Pengisian kapasitor dari sumber dc 17
9. Karakteristik motor universal 19
10. Arus motor universal 21
11. Metode pengaturan tahanan luar dari pengaturan kecepatan motor universal 25
12. Blok diagram pengaturan kecepatan motor universal dengan
menggunakan triac 30
13. Grafik tegangan sumber AC 31
14. Grafik output picu 32
15. Grafik output triac 32
16. Gelombang picu (trigger) 3,6" 34
17. Gelombang output triac yang dipotong pada3,6° 34
18. Gelombang picu (trigger) 90° 35
19. Gelombang output triac yang dipotong pada 90° 35
xi
20. Gelombang picu (trigger) 180!) 36
21. Gelombang output triac yang dipotong pada 180° 36
22. Grafik pengaruh sudut picu terhadap besar tegangan 38
23. Grafik pengaruh sudut picu terhadap putaran motor 38
24. Grafik pengaruh besar tegangan terhadap putaran motor 39
25. Grafik pengaruh besar hambatan terhadap besar sudut picu s>\
XI1

MIL1KPF.RPUSTAKAAN-!- U-UII
LEMBAR PENGESAHAN DOT^TPENGLJI
KENDAIJ KECEPATAN MOTOR UNIVERSAL DENGAN
MENGGUNAKAN TRIAC
Telali dipertahankan di depan sidangpengiiji sebagai salali satu syarat untuk
tnemperoleh gelar Sarjana Teknik
Hari ; Kaniis
Tanggal : 28 Agustus 2003
Tim Penguji Tanda Tangan
1. Ir. Hi. Budi Astuti
X7 ,/-'^">-'
^s^^cC-ctcyz<^~?2. Wahvudi Budi
3- Hendra Setiawais. S.!'
Mengetahui,
Dekan Fakultas Teknologi Industri
L m \ ei sita^TsBfef' Indonesia
^^Xifc iutrisno, Msc
11 ^.-,//'/'

dalam kesempatan mi dengan segala kerendahan hati dan penghargaan
yang tulus, penulis menghaturkan banyak terima kasih kepada :
1. Bapak Ir. Bachrun Sutnsno, Msc selaku Dekan Fakultas Teknologi
Industri Universitas Islam Indonesia.
2. Ibu Ir. Hj. Budi Astuti, selaku Ketua Jurusan Teknik Elektro Universitas
Islam Indonesia sekaligus Dosen Pembimbing Tugas Akhir.
3. Bapak Wahyudi Budi Pramono, ST selaku Dosen Pembimbing Tugas
Akhir.
4. Segenap Dosen Teknik Elektro Universitas Islam Indonesia.
5. Orang tua beserta kakak dan adik yang telah memberikan segalanya
bagi Penulis.
6. Teman - teman Asisten : Didik, Hajid, Doni, Erwin, dll thanks for all.
7. Segenap teman-teman di Jurusan Teknik Elektro Universitas Islam
Indonesia.
8. Serta semua pihak yang tak dapat disebutkan satu persatu yang telah
membantu Penulis hingga terselesaikannya Tugas Akhir ini.
Mohon kritik dan saran yang mendukung kepada semua pihak yang
membaca Laporan Tugas Akhir ini.
iv

HALAMAN PERSEMBAHAN
Tugas Akhir ini khusus kupersembahakan kepada :
« Ayahanda dan Ibundakii tercinta atas segala cinta, kasih,
pengorbanan dan doayang telah kau berikan
* Kakakku Marta, Yasrin plus Rayyan , adikku Hana
tersayang yang selalumengganggu dan mengomeliku
• Emma dan Puput tersayang atas segala doa, dukungan,
kasih sayang, serta pengorbanannya
VI1

MOTTO
"... Katakanlah : Adakah sama orang-orang yang mengetahui dengan
orang-orang yang tidak mengetahui ? Sesungguhnya orang yang
berakallah yang dapat menerima pelajaran"
. (Q.S. Az-Zumar : 9)
"... Allah meninggikan orang-orang yang beriman diantara kamu dan
orang-orang yang diberi ilmu pengetahuan beberapa derajat...".
(Q.S. Al Mujadallah : 11)
" Barang siapa yang meneinpuh jalan untuk mencari ilmu, maka Allah
akan memudahkan baginya jalan menuju surga".
(H.R Muslim dan Abu Hurairah r.a)
VI

DAFTAR TABEL
Tabel Hasil Pengamatan 37
Xlll

MILIKJJAB j PERPUSlAKAAN-FTI-UII
VOGrAKARTA
PENDAHULUAN
I.l. Latar Belakang Masalah
Pada waktu ini lapangan rekayasa kontrol industri dan rumah
tangga sangatlah luas, mencakup semua cabang ilmu pengetahuan
dan memanfaatkan semua bentuk energi, seperti mekanis,
elektris/elektronis, hidrolik, dan pneumatik. Sistem kontrol juga
telah disusun untuk berbagai aplikasi industri seperti pengontrolan
kecepatan pada belt conveyor (ban berjalan) yang digunakan sebagai
sarana transportasi barang antar unit produksi, selain itu dalam
instalasi rumah tangga atau instalasi perkantoran yang
menggunakan lift atau escalator membutuhkan pengontrolan, seperti
tegangan, daya, temperatur, tingkatan, aliran, tekanan, posisi,
kecepatan, dan lainnya.
Pengontrolan alat-alat ini sangat dibutuhkan, sebab jika ada
gangguan atau ketidakstabilan dari alat yang digunakan di dunia
indrustri atau perusahaan tentu akan mengganggu keseluruhan
sistem produksi yang ada, sehingga dapat merugikan perusahaan
atau pabrik tersebut.
r7 (ifHlohu/uan

Pada saat ini banyak terdapat proses industri yang
menggunakan peralatan elektronika untuk menghasilkan dan
menyesuaikan sinyal pengontrolan yang diperlukan. Hal ini
disebabkan oleh kelebihan peralatan elektronika dalam bidang
ukuran fisik, kehandalan dan biaya karena telah diketemukannya
mikroelektronika.
Pengontrolan alat-alat atau mesin yang bekerja secara mekanis
dapat dilakukan secara otomatis atau manual dengan sistem
elektronik, salah satunya adalah adalah dengan menggunakan triac.
Pada alat-alat industri dan rumah tangga disekitar kita sangat
banyak ditemui berbagai pengontrolan motor listrik.
Dalam penelitian ini penulis menggunakan motor universal,
dikarenakan motor ini yang paling banyak digunakan dalam dunia
industri maupun dalam alat-alat rumah tangga karena ditinjau dari
segi medan berputar memiliki kecepatan tetap, mesin-mesin ini pada
umumny'a jauh lebih sesuai untuk keperluan alat-alat yang
kecepatannya dapat diatur dibandingkan dengan jenis mesin-mesin
yang lain. Penggunaan motor universal dikarenakan kecepatan kerja
motor universal mudah diatur dalam suatu rentang kecepatan yang
lebar, disamping banyaknya metoda pengaturan yang dapat
digunakan. Selain itu motor ini mempunyai karakteristik sumber

arus yang dapat menggunakan sumber arus searah (DC) maupun
bolak-balik (AC).
1.2. Rumusan Masalah
Dalam alat-alat industri dan peralatan rumah tangga banyak
sekali menggunakan motor universal, dan karakteristik motor ini
yang dapat diatur kecepatannya menjadikan motor ini banyak
digunakan. Pengaturan kecepatan ini penting karena dalam suatu
proses produksi, dan kita membutuhkan bervariasinya kecepatan
motor untuk berbagai keperluan. Contohnya dalam suatu alat
pencampur atau mixer, apabila bahan yang akan kita campur berupa
benda padat tentu membutuhkan kecepatan yang lebih rendah
apabila kita mencampur dalam bentuk cairan yang bisa
menggunakan kecepatan tinggi.
Cara pengendalian kecepatan motor ini dapat menggunakan
berbagai macam cara antara lain :
• Pengaturan fluks dengan cara mengatur arus medan
• Pengaturan tahanan yang berhubungan dengan rangkaian
kumparan
• Pengaturan tegangan pada terminal-terminal kumparan.
?7 e-/t.(/<tf>.a/(/A
Berdasarkan latar belakang masalah diatas dalam tugas akhir
ini penulis mencoba mengambil bagaimana mengendalian kecepatan
motor dengan cara pengaturan tegangan pada terminal-terminal
kumparan, yaitu dengan menggunakan triac sebagai pengatur
tegangan masuk motor.
1.3. Batasan Masalah
Pada penelitian ini penulis akan membatasi masalah agar tidak
menyimpang dari obyek yang diteliti yaitu menggunakan sistem
kontrol terbuka. Dalam sistem kontrol terbuka ini terdapat
inisialisasi aksi, tetapi sistem ini tidak dapat mengubah aksi itu
ketika bereaksi, sehingga tidak ada umpan balik. Metode yang
digunakan adalah motode pengaturan tegangan pada terminal
kumparan motor, menggunakan motor universal dengan tegangan
input 220V, kecepatan minimum 0 rpm dan batasan kecepatan
maksimum 3000 rpm.
Ini berarti pada penelitian ini hanya dibicarakan operasi dan
peralatan yang digunakan pada bagian pengendali kecepatan motor
AC/DC. Lebih khusus lagi pengendalian motor universal dengan
menggunakan triac.
Hal-hal yang diluar sistem tersebut hanya akan disinggung sebagian.

1.4. Tujuan Pembuatan Tugas Akhir
Tujuan pembuatan tugas akhir adalah:
• Untuk mengatur kecepatan motor universal dengan metode
pengaturan tegangan.
• Mengamati pengaruh besar tegangan terhadap kecepatan putar
motor.
1.5. Manfaat Penelitian
Manfaat penelitian adalah:
• Dapat mengatur kecepatan motor universal dengan
menggunakan Triac.
• Dapat memudahkan manusia dalam mengatur kecepatan motor
dimana membutuhkan bervariasinya kecepatan tanpa harus
mengganti motor.
1.6. Metode Penelitian
Dalam penelitian ini metode penelitian yang akan saya tempuh
adalah sebagai berikut:
• Studi pustaka
r/ cniHi/iu/u

Studi pustaka digunakan untuk mendapatkan informasi yang
berkaitan dengan Triac sebagai pengatur tegangan pada motor
Universal.
• Perancangan Sistem
Perancangan alat \rang menjadi obyek penelitian, dalam hal ini
"Pengaturan kecepatan motor Universal dengan menggunakan
Triac".
• Implementasi
Implementasi alat ini pada motor universal yang membutuhkan
pengaturan kecepatan.
• Pengujian
Pengujian alat dilakukan dengan cara menjalankan alat
tersebut untuk memastikan pengaturan kecepatan motor
universal dengan baik.
1.7. Sistematika Penulisan
Sistematika penulisan tugas akhir terdiri dari 5 bab yang
masing-masing sebagai berikut:
BAB I. Pendahuluan
1.1. Latar Belakang Masalah
1.2. Rumusan masalah
ZV e.HfUffi.ulfMrn

1.3. Batasan Masalah
1.4. Tujuan Penulisan
1.5. Manfaat Penelitian
1.6. Sistematika Penulisan
BAB II. Landasan Teori
Bab ini memuat teori yang berhubungan dengan
penulisan.
BAB III. Perancangan Sistem
Bab ini menjelaskan metode perancangan yang
digunakan , cara mengimplementasikan rancangan dan
pengujian sistem yang telah dibuat serta hambatan
selama proses perancangan.
BAB IV. Analisis dan Pembahasan
Bab ini membahas tentang hasil dari sistem yang
dibuat dibandingkan dengan dasar teori sistem.
BAB V. Penutup
V.l. Kesimpulan
V.2. Saran
d><<ti.<i«/*Mru<

Perhitungan II. R = 50 kQ
RC = 50kfix0.1uF
= 0.005 s
Maka sudut picunya :
5.10-,.Yl.lO-".rl80°*
0.01
- 90°
Hasil pengamatan bentuk gelombang picu ini terlihat dari
gambar 4.7.
Gambar 4.7 Gelombang tegangan picu (trigger ) 90°
Sedangkan hasil pengamatan bentuk gelombang output triac
terlihat dari gambar 4.8.
Gambar 4.8. Gelombang tegangan beban yang dipotong pada 90'
~'r- /f/(/ff,i(' {/OH ,7C/t)')(//l((i<ltl
35

BAB II
LANDASAN TEORI
II. 1. Triac
II. 1.1 Cara kerja Triac
Triac adalah alat semikonduktor empat lapisan (layer) yang
berupasusunan P-N-P-N junction, sehingga triac ini dapat disebut
juga sebagai PNPN dioda. Diagram sambungan adalah seperti pada
gambar 2.1 (a), sedangkan simbol triac pada gambar 2.1(b)
MT1
Gerbang
Terminal
utama 2
J$>Terminal
utama 1
(a) (b)
Gambar 2.1 (a) Diagram Sambungan dan (b) Simbol Triac
Triac atau triode dua arah mempunyai tiga terminal yaitu
terminal utama 1, terminal utama 2, dan gerbang {gate}. Triac
dapat menghalangi arus listrik dalam dua arah antara terminal
utama 1 dan dan terminal utama 2, dan triac juga dapat dipicu
agar melakukan konduksi dalam kedua arah dan tanggap
^t<r/i(U!.,a/i ryeo/,;

terhadap sinyal positif ataupun negatif yang disambungkan pada
terminal gerbang. Sekali triac mulai konduksi, ia akan terus
konduksi sampai triac dihentikan .
Oleh karena triac dapat melakukan konduksi dalam dua
arah, maka triac pada dasarnya sebagai alat daya AC untuk
mengendalikan beban AC, dan dengan demikian triac dapat
menggantikan tahanan geser untuk mengendalikan daya AC,
selain itu triac dapat juga digunakan sebagai saklar static dalam
rangkaian AC. Triac dapat dikonduksikan pada setiap setengah
siklus yang diberikan pada gerbangnya.
Adapun karakteristik tegangan versus arus dapat dilihat
pada gambar 2.2. Pada karakteristik tegangan versus arus diatas
diperlihatkan bahwa triac mempunyai 3 keadaan daerah , yaitu :
1). Keadaan pada saat tegangan balik (daerah I)
2). Keadaan pada saat tegangan maju (daerah II)
3). Keadaan pada saat triac konduksi (daerah III)
Pada daerah I, triac sama seperti dioda, dimana pada
keadaan ini tidak ada arus yang mengalir sampai sampai
dicapainya batas tegangan tembus (Vr).
Pada daerah II, terlihat bahwa arus tetap tidak akan
mengalir sampai dicapainya batas tegangan penyalaan (Vbo).
Apabila tegangan mencapai tegangan penyalaan, maka tiba-tiba
tegangan akan jatuh menjadi kecil dan arus akan mengalir.
Pada saat ini triac mulai konduksi dan ini adalah daerah III. Arus
yang terjadi pada saat triac konduksi , dapat disebutkan sebagai
arus genggam (Ih = holding current). Arus Ih ini cukup kecil yaitu
dalam orde milliampere.
Untuk membuat triac menjadi off, dapat dilakukan dengan
menurunkan arus triac tersebut dibawah arus genggamnya (Ih),
dan selanjutnya triac tidak akan menyala (on) kembali, sebelum
diberikan tegangan penyalaan.
ksmmi witfta-
MifD
wmmwamSi
' um MBS»T \
l«or crura)**
wmmmm,IMMRHiW! /" etatmt
m mamma'J,
^mmmi.imj-m-
*m immn';
~ypleal trite VI crwucteristic etavss.
Gambar 2.2 Karakteristik triac dihubungkan dengan tegangan AC
"iat/da.uit/ Cyeayi.

tTeg. AC
1
-Ik
Reban MJLA
Gambar 2.3 Bagan triac dan gelombang keluarannya
Gambar diatas memperlihatkan apa yang akan terjadi kalau
sebuah triac dihubungkan dengan tegangan bolak-balik.
Pada keadaan a, impuls penyalaan diberikan pada saat
tegangannya menjadi positif sehingga arusnya dapat mengalir
selama setengah perioda penuh.
Pada keadaan b dan c, impuls penyalaannya diberikan lebih
lambat, jadi arusnya hanya dapat mengalir selama sebagian dari
setengah perioda saja. Hasilnya ialah suatu tegangan searah yang
variabel, dengan riak yang besar. Bagian dari setengah perioda,
dimana triacnya menghantarkan arus, dinamakan sudut buka
atau sudut hantar. Untuk keadaan a sudut ini sama dengan 180°,
untuk b 120° dan untuk c 60°.
^Latu/tiMin CJeo/1

12
II.2. Diac
II.2.1. Cara Kerja Diac
Diac adalah suatu dioda picu dua arah yang dirancang secara
khusus untuk memicu suatu Triac atau SCR. Diac biasa disebut
diode picu bilateral atau diode picu dua arah.
Pada dasarnya diac tidak menghantarkan atau menghalangi arus
listrik dalam dua arah sampai tegangan pecah (breakover voltage)
dicapai, kecuali pada suatu arus bocoran kecil. Pada saat
breakover voltage dicapai diac mengalami suatu karakteristik
hambatan negatif, dan penurunan tegangan yang menyilang
melewati belakang diac, kira-kira sekitar 5 volt, sehingga
menciptakan suatu breakover arus yang cukup untuk memicu
suatu triac atau SCR.
Suatu karakteristik khas dari diac ditunjukkan gambar di bawah
ini dengan lambang menurut gambarnya.
'O/iaa.kt/i ""Jean
L
H'fait) *
48WWWM m.im3WJMU.Y M 10 « V
ffiSKcuttnt: *i.
snaaorennrnfu
mn cutunt J
wmii» to mo sa
FrPS*U« !« T« w i,
Gambar 2.4 Karakteristik diac
13
Walaupun diac hanya mempunyai penyambungan tegangan yang
simitris tetapi dapat juga menyambungkan asimitris. Diac
sebenarnya mempunyai power dissipasi (penyerapan daya )
berkisar antara 1/2 sampai 1 watt.
Karakteristik diac yang utama adalah:
( a) Breakover voltage
( b) Voltage simetri
( c) Breakback voltage
( d) Breakover sekarang
( e) Pengosongan
II.3. Rangkaian Pulsa
Rangkaian pulsa ini sangat berguna pada pemakaian
rangkaian pengaturan. Umumnya digunakan sebagai pulsa picu
(trigger) untuk menyalakan triac dan biasa disebut rangkaian RC.
Apabila resistor dan kapasitor tersebut dihubungkan dalam
rangkaian seri dan dihubungkan dengan tegangan AC maka dapat
digunakan sebagai pemicu diac dan triac.
Waktu (periode) dari tegangan output (Vo) dapat diubah-ubah
dengan mengatur besar tahanan Rl.
-^ta/i</«>«» Cj<'(in
220V
(50Hz)
L<*<t< _f—^—
•u
\nm
CO!y #.mill (f-
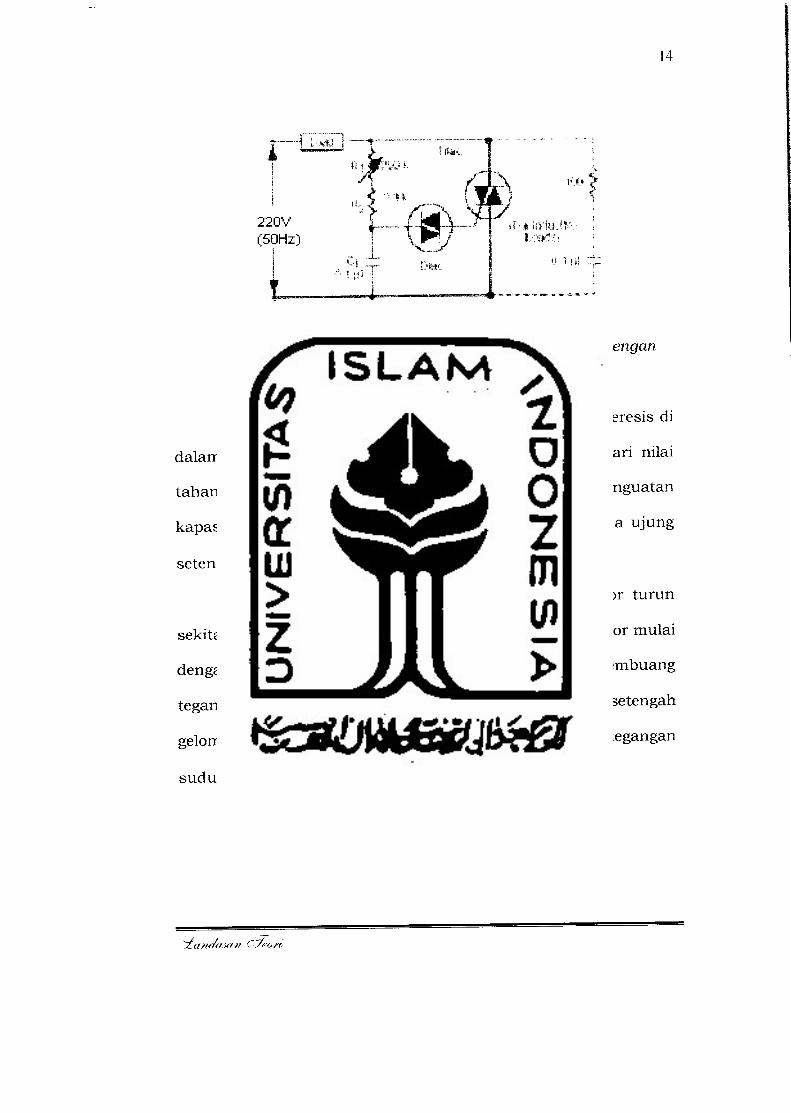
Gambar2.5 Rangkaian pengatur kecepatan motor dengan
triac
Pada gambar 2.5 di atas, menggambarkan efek histeresis di
dalam kapasitor yang memicu diak. Ketika Rl turun dari nilai
tahanan maksimumnya, nilai tegangan melewati penguatan
kapasitor sampai picu pertama diac melewati titik A pada ujung
setengah gelomban ( menyebabkan pemicuan pada 9i).
Setelah pulsa gerbang memicu, tegangan kapasitor turun
sekitar separuh dari tegangan picu, menyebabkan kapasitor mulai
dengan kondisi yang berbeda. Ketika kapasitor membuang
tegangan ke diac, tegangan picu pada titik B dalam setengah
gelombang yang berikutnya dan memberi potongan tegangan
sudut 0 pada tegangan triac.
y<w<urMi/i C-'e<

15
^C._V_NE7_-v
v—'+i j*.iV.
Gambar 2.6 Grafikperbandingan tegangan diac,capasitor
Dari gambar 2.6 dapat diketahui bahwa penambahan suatu
detik pergeseran fasa RC mempengaruhi cakupan yang luas pada
pengendalian dan mengurangi histeresis mempengaruhi bagi
suatu daerah yg kecil. Rangkaian ini akan mengendalikan dari 5%
sampai 95% pada beban penuh, tetapi fungsi utamanya adalah
menyediakan variasi tegangan. Ketika nilai Rl besar CI mengisi
sebagian besar melalui R3 dari tegangan yang fasenya berganti
melalui C2. Proses ini menyediakan cakupan pergeseran fasa
tambahan ke seberang CI dan memungkinkan C2 secara parsial
mengisi kembali CI setelah diac memicu, begitu mengurangi
histeresis, R3 harus disesuaikan sehingga rangkaian baru saja
jatuh ke luar dari konduksi ketika Rl dibawa ke tahanan
maksimum.
^tatidctza/t Cyeori,
1.0
o
S
a-
a'
o
10
CL
*
~< *j=3o
0.1
12 3 4 5
Time C counts
ng_ie AN' XC 8 Causae"!- C"argrg f-onr DC bc-.rc~
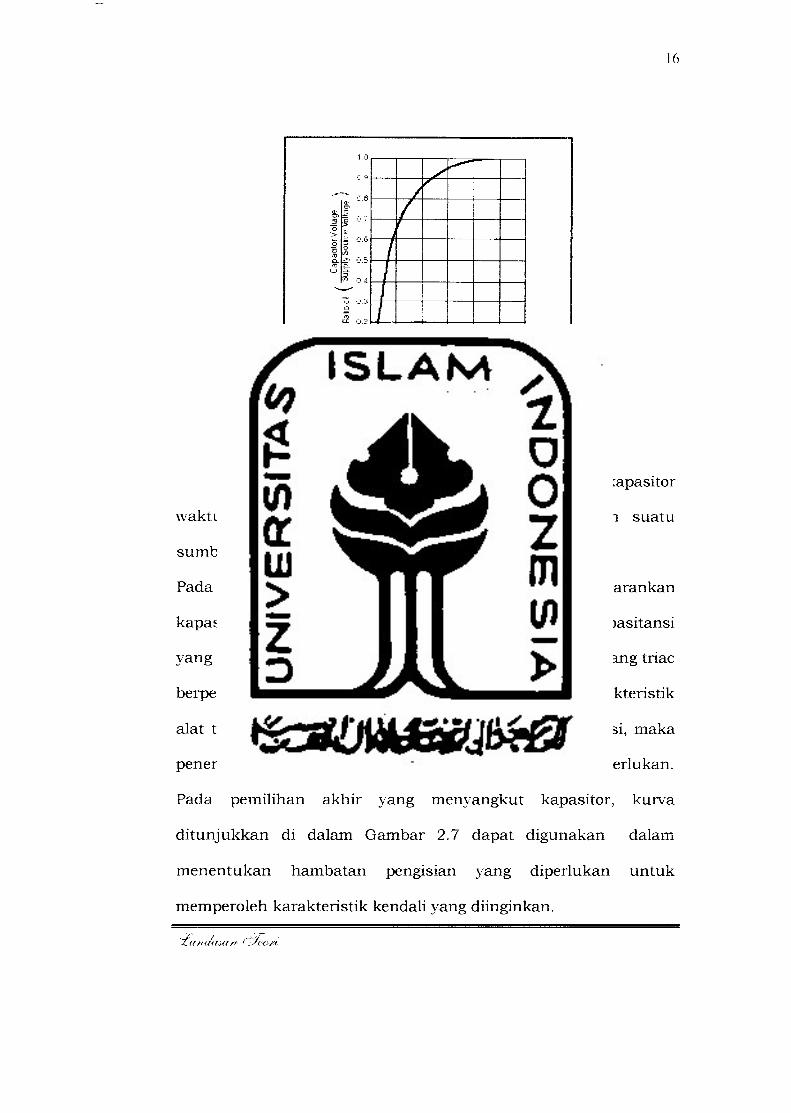
Gambar 2.7 Pengisian kapasitor dari sumber DC
Gambar 2.7 menunjukkan karakteristik tegangan kapasitor
waktu osilator relaksasi apabila dihubungkan dengan suatu
sumber DC murni
Pada umumnya pada karakter kapasitor ketika mengeluarankan
kapasitansi menjadi titik awal pemilihan suatu nilai kapasitansi
yang dapat digunakan untuk memicu triak. Alat picu gerbang triac
berperan dalam pemilihan karakteristik itu. Semua karakteristik
alat tidaklah selalu sepenuhnya ditetapkan dalam aplikasi, maka
penentuan yang bersifat percobaan kadang-kadang diperlukan.
Pada pemilihan akhir yang menyangkut kapasitor, kurva
ditunjukkan di dalam Gambar 2.7 dapat digunakan dalam
menentukan hambatan pengisian yang diperlukan untuk
memperoleh karakteristik kendali yang diinginkan.
~£a/nWM/r CyedJ'l,

17
Banyak rangkaian yang dimulai pada saat setengah
gelombang dengan tegangan kapasitor tepat atau mendekati nol.
Kebanyakan rangkaian meninggalkan sisa tegangan yang
besar pada kapasitor setelah pemicuan. Oleh karena itu dalam
memasang resistor harus ditentukan atas dasar picu tambahan
untuk menaikkan pengisian kapasitor untuk potensial picu.
II.4. Motor
Motor-motor menurut sumber tegangannya terbagi menjadi
3 macam yaitu:
• Motor AC
Yaitu motor yang sumber tegangannya menggunakan
tegangan bolak-balik atau AC, motor ini terdiri atas:
- Motor Asinkron
- Motor Sinkron
• Motor DC
Yaitu motor yang sumber tegangannya menggunakan
tegangan searah atau DC, motor ini terdiri dari dua bagian
yaitu:
- Eksitasi terpisah contohnya :
- Eksitasi tertutup contohnya : - Motor Shunt
- Motor Seri
- Motor Compound

18
• Motor AC/DC
Yaitu motor yang sumber tegangannya dapat
menggunakan tegangan AC atau DC contohnya :
Motor Universal
Motor universal
Konstruksi motor universal
Motor universal merupakan motor arus bolak-balik dan
motor arus searah. Penamaan motor ini berasal dari kenyataan
bahwa motor ini dapat dihubungkan dengan sumber tegangan AC
ataupun DC dengan karakteristik yang serupa.
Sudut moment kakas dibuat tetap oleh dudukan sikat dan
biasanya pada harga optimum sebesar 90 derajat. Perputaran
motor pada mesin universal ini ditimbulkan oleh adanya medan
putar (fluks yang berputar) yang dihasilkan dalam kumparan
statornya.
Motor universal yang kecil dipergunakan apabila beban yang
ringan seperti pada vacum cleaner, peralatan dapur, dan alat-alat
portabel dan biasanya bekerja pada kecepatan tinggi (1500-
15.000rpm). Contoh karakteristik ditunjukkan pada gambar
dibawah
~2l(inda.wm (~yeo-/'i

V
N
Gambar 2.8 Karakteristik motor universal
Karakteristik AC dan DC cukup berbeda karena dua alasan:
1. Apabila motor dihubungkan dengan arus bolak balik, jatuh
tegangan reaktansi di dalam medan dan gandar kumparan
menyerap sebagian dari tegangan yang diberikan, dan
karenanya untuk momen kakas dan arus tertentu tinggal lawan
putar yang dibangkitkan pada gandar kumparan lebih kecil
dari pada dengan arus searah dan kecepatannya cenderung
untuk menjadi lebih rendah.
2. Apabila motor dihubungkan dengan arus bolak balik,
rangkaian magnetis mungkin menjadi cukup jenuh pada
puncak gelombang arus, dan harga RMS dari fluks dapat
menjadi lebih kecil jika dengan arus bolak balik dibandingkan
jika dengan arus searah pada harga RMS yang sama,
karenanya momen kakas cenderung lebih kecil dan
kecepatannya lebih tinggi dengan arus bolak balik
dibandingkan jika dengan arus searah.
ya/idasan Cyeo/

20
Medan putar ini terjadi apabila kumparan stator
dihubungkan dalam fasa banyak, umumnya tiga fasa. Hubungan
dapat berupa hubungan bintang atau delta.
Daya masuk untuk pembangkit fluks merupakan daya induktif,
oleh karenanya motor universal bekerja pada faktor kerja
terbelakang. Sedangkan pada motor sinkron terdapat dua sumber
pembangkit fluks yaitu arus bolak-balik pada stator dan arus DC
pada rotor.
II.4.2. Persamaan-persamaan tegangan dari motor universal
Di dalam sebuah rangkaian motor universal terdapat
beberapa persamaan yang berlaku yaitu :
1. =V-lih
R
V
T
-•
Gambar 2.9. Persamaan motor universal
!• i, = GGL lawan (back EMF) dari jangkar (watt)
^tan</<fifrii Cye<irr.

Rd = Tahanan untai jangkar ( ohm
V = Tegangan Masuk ( volt)
i-:h = <|> ZN x voltKa
Sehingga :
- Tegangan V berlawan arah dengan EMF /:',
- Didalam jangkar terjadi jatuh tegangan IiiRi
Jadi V = a; + IJ<u
Dari bentuk ini dapat dituliskan :
I••'./( = EJ:I + l]Ru
!7, = Masukan daya listrik ke jangkar
/•" /J' "= Daya mekanik yang setara daya listrik yang timbul dalam
jangkar
l:Ra= Rugi tembaga dalam jangkar
K,Jo = Pm = daya mekanik
Pm = VIa - 1:Rli
Untuk kondisi daya Pm maksimum ialah :
di
V = 2luR = 0 jadi laRa = -
y a//r/f/.i(/// cyco

Dari persamaan tegangan motor
= V - I R,J^ =V- l"R- atau <$> ZN (-
V-I..R. ( a ^Jadi N =
<j) \ZPrpm
Apabila V - laRa = Eh maka N = ~x ~
k /•' tfJadi N = —^ dimana k = — = tetap
(j) Pz
Dari persamaan ini dapat dilihat bahwa kecepatan N berbanding
langsung dengan ggl lawan Eb dan berbanding terbalik dengan
fluks <|>.
II.4.3. Cara kerja motor universal
Ada beberapa prinsip kerja motor universal yaitu :
1. Apabila sumber tegangan dipasang pada kumparan stator akan
timbul medan putar dengan kecepatan Ns = 120 f/p
2. Medan putar stator tersebut akan memotong batang konduktor
pada rotor.
3. Akibatnya pada kumparan rotor timbul tegangan induksi (GGL)
sebesar:
/:, =4.44 f2 N2 ^ (untuk satu fasa)
E2s adalah tegangan pada saat rotor berputar
^La/tda:>ati Cyeo-n
rpm
11

4. Karena kumparan rotor merupakan rangkaian tertutup maka
ggl (E) akan menghasilkan arus (I).
5. Adanya arus (I) di dalam medan magnet menimbulkan gaya (F)
pada rotor.
6. Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor yang
cukup besar untuk memikul kopel beban, rotor akan berputar
searah dengan medan putar stator.
7. Seperti yang dijelaskan pada (3) tegangan induksi timbul
karena terpotongnya batang konduktor (rotor) oleh medan
putar stator. Artinya agar tegangan terinduksi diperlukan
adanya perbedaan relatif antara kecepatan medan putar stator
(Ns) dengan kecepatan putar rotor (Nr).
8. Perbedaan kecepatan antara Nr dan Ns disebut slip (S)
dinyatakan dengan:
S = (Ns-Nr)/NsX 100%
9. Bila Nr =Ns, tegangan tidak akan terinduksi dan arus tidak
mengalir pada kumparan jangkar rotor, dengan demikian tidak
dihasilkan kopel. Kopel motor akan ditimbulkan apabila Nr
lebih kecil dari Ns.
ya/HWMt.n cyc<

24
II.3.4. Cara pengendalian motor universal
Motor universal pada umumnya berputar dengan kecepatan
konstan, mendekati kecepatan sinkronnya sehingga mudah diatur
dalam suatu rentang kecepatan yang lebar disamping banyaknya
metoda yang dapat digunakan. Meskipun demikian pada
penggunaan tertentu dikehendaki juga adanya pengaturan
kecepatan putaran.Biasanya pengaturan ini dapat dilakukan
dengan beberapa cara yaitu:
II.3.4.1 Mengubah frekuensi jala-jala
Pengaturan putaran motor universal dapat dilakukan
dengan mengubah-ubah harga frekuensi jala. Hanya saja untuk
menjaga keseimbangan kerapatan fluks, perubahan tegangan
harus dilakukan bersamaan dengan perubahan frekuensi.
Persoalannya sekarang adalah bagaimana mengatur frekuensi
dengan cara yang efektif dan ekonomis. Salah satu cara
pengaturan frekuensi dengan menggunakan solid state frequency
converter.
II.3.4.2. Mengatur tegangan jala-jala
V^..,,-l..R.-K.n - — -
k6
Dari persamaan kopel motor universal diatas diketahui
bahwa kopel sebanding dengan perangkat dua tegangan yang

25
diberikan. Untuk karakteristik beban kecepatan akan berubah
dari nl ke n2 untuk tegangan masuk setengah tegangan
semula.Cara ini hanya menghasilkan pengaturan putaran yang
terbatas (daerah pengaturan sempit).
H.3.4.3. Pengaturan tahanan luar
Tahanan luar universal rotor belitan dapat diatur dengan
demikian dihasilkan karakteristik kopel kecepatan yang berbeda-
beda.Untuk tahanan terminal seri yang berharga tetap, didapat
perubahan kecepatan yang lebar karena perubahan beban, sebab
besar kecepatan tergantung pada turunnya tegangan pada
tahanan tersebut yang berarti tergantung pada besar arus
kumparan yang dibutuhkan oleh beban. seperti pada gambar.
Vt
•
•-
Rl
R2 (motor)
Gambar 2.10. Metode Pengaturan tahanan luar dari pengaturan
kecepatan motor universal
'ZCiinu<i.i<t ti '"yeoj'f

26
Putaran akan berubah dari nl ke n2 dari n2 ke n3 dengan
bertambahnya tahanan luar yang dihubungkan ke motor.
ya/id<r,xiti Cy<'(in

BAB III
PERANCANGAN SISTEM
III. 1. Perancangan
Motor Universal memiliki dua buah terminal yang terhubung
dengan catu tegangan 220 V. Kecepatan putar motor universal
ditentukan oleh besarnya tegangan yang masuk melalui terminal.
Pengaturan tegangan masuk motor universal ini diatur dengan
menggunakan triac yang berfungsi sebagai pemotong tegangan dan
triac ini dapat dipicu pada pulsa positif dan pulsa negatif.
Triac ini dipicu pada kedua setengah siklusnya oleh rangkaian
RC yang dipakai untuk mengontrol tegangan yang diberikan ke diac,
yang digunakan untuk menyekat gerbang triac sampai diac itu
mencapai batas maksimum (40V) ketika sebuah pulsa arus mengalir
untuk memacu triac. Pemicuan triac terjadi ketika pengisian muatan
kapasitor melalui resistor dari sumber arus mencapai breakover
voltase dari tegangan penyalaan,maka akan terjadi pengosongan
muatan kapasitor melalui gerbang triac sehingga akan terjadi
pemicuan terhadap triac.
Sudut pemicuan gelombang yang keluaran diperoleh dari
bermacam-macam tetapan-waktu yang dikeluarkan dari rangkaian
c7eranear*gan <yidem ^-7

RC sehingga dapat terjadi pada sudut fase berbeda dalam pemicuan
separuh atau siklus penuh.
Untuk mengatur kecepatan motor universal kita hanya memutar
variabel resistor, dan untuk mengetahui kecepatan motor
menggunakan tachometer.
III.2. Implementasi Alat
Sumber tegangan dihubungkan dengan tegangan jala-jala listrik
yaitu menggunakan 220 V.
Untuk pengaturan tegangan masuk ke motor menggunakan triac
tipe Q4004LT. Pemilihan triac ini karena triac Q4004LT telah
terintegrasi dengan trigger diac, selain itu triac ini memiliki
karakteristik tegangan maksimum 400V, arus maksimal yang dapat
dilalui 4A dengan m trigger diac 43V.
Triac ini dipicu dengan menggunakan rangkaian RC. Rangkaian
RC ini akan mengubah-ubah waktu (periode) dengan jalan mengatur
besarnya nilai tahanan geser yang masuk, tahanan geser yang
dipakai di sini adalah 100KQ, sedangkan nilai kapasitor adalah
konstan yaitu 0. lrjf / 400V.
Tegangan keluaran dari triac ini kemudian dihubungkan dengan
motor universal dengan spesifikasi 230V dengan kuat arus 1,5A.
^f ew/tcanqaw Cyiitei,

29
Tegangan keluaran dari triac yang telah dipicu ini digunakan
sebagai sumber tegangan motor universal, sehingga kecepatan putar
motor universal dapat dikendalikan.
III.3. Blok Diagram Sistem
Dari hasil penelitian ini, maka akan dirancang sebuah sistem
sebagai berikut :
Tegangank
Ranj*kaian Motor
UniversalInput Triac w
i L
Rangkaian Picuw
(Tr gger)
Gambar 3.1. Blok diagram pengaturan kecepatan motor universal
dengan menggunakan Triac
lVe>'<inranqan Cyirfe/n.

BAB IV
ANALISA DAN PEMBAHASAN
IV. 1. Sistem yang dirancang
Sistem yang dirancang adalah pengaturan kecepatan
motor universal dengan menggunakan triac, seperti pada
skema dibawah.
__^-u~ m 1 . 1
Motor
Ti
>
ri^i.
5<n
.
*
* >— a ^ 1 <v V v ' ' H •i"
t
i > «n <» '
Gambar4.1. Gambar rangkaian pengatur kecepatan
IV.2. Cara kerja
Sumber tegangan dihubungkan dengan tegangan jala-
jala listrik, gambar grafik dari sumber tegangan AC adalah
sebagai berikut:
' h«'ft.i<t </<tn ,J/ f'tni>an<i:,(,30

Gambar 4.2 Grafik tegangan sumber AC
Dari gambar di atas diketahui bahwa bentuk gelombang
berupa sinus dengan besar tegangan 215 V dan frekwensi 50
Hz.
Sehingga terjadi pengisian muatan pada kapasitor Ci
melalui hambatan Ri , pada saat Vc mencapai tegangan
penyalaan (Vbo) maka akan terjadi pemicuan , seperti pada
gambar di bawah ini :
Gambar 4.3. Grafik tegangan picu
t/io/t.ur </<//( ./ e>fi/io//</:,<<

Triac dalam posisi on sehingga akan melewatkan
tegangan seperti terlihat pada grafik dibawah :
1~>
Gambar 4.4 Grafik tegangan beban
Untuk menaikkan atau menurunkan kecepatan motor
maka digunakan variable resistor (tahanan geser) untuk
mengatur besarnya tegangan yang masuk ke dalam kapasitor.
Jika tegangan yang masuk dapat dirubah-ubah nilainya
maka akan berpengaruh terhadap besarnya kecepatan motor.
IV.3 Hasil penelitian
VI.3.1 Rangkaian Triac
Rangkaian triac disini digunakan sebagai pemotong
tegangan masuk motor. Pemotongan ini berdasarkan atas picu
yang diberikan ke gerbang picu triac oleh rangkaian picu
(trigger).r' ///<///,,<( </<rti ,/e//t/i<>//<r.,«/i

Besarnya sudut picu yang diberikan akan mempengaruhi
besarnya tegangan keluaran dari triac seperti terlihat dalam
tabel 4.1.
Dalam pengambilan data digunakan variable-variabel seperti
berikut :
Tegangan masuk
Frekwensi Jala-jala
Kapasitor
Tahanan
V - 215 V
50 Hz
C = 0,1 uF ( konstan
R = Variabel resistor
Dari variable-variabel di atas dapat diketahui:
T = —/
50
0.02 s
Maka periode dari Ma siklus pada 50 Hz adalah 0.01 s
Perhitungan I. R = 2 kQ
RC = 2 kQxO.luF
= 0,02 s
<~r/n<//f,,</ </</>/ ,-y'r.ttioff/to

Maka sudut picunya :
2.i(r.vi,ur".\-i8o"
d, = o.oi
= 3,6°
Hasil pengamatan bentuk gelombang picu ini terlihat dari gambar
4.5.
Gambar 4.5 Gelombang tegangan picu (trigger )pada 3,6°
Sedangkan hasil pengamatan bentuk gelombang output triac
terlihat dari gambar 4.6.
«,»,
-I: 1
Gambar 4.6. Gelombang tegangan beban yang dipotong pada 3,6°
'( If/<//>.:,(> (If/// ,y f:ttl/ui/i<f,if,

Perhitungan II. R = 50 kQ
RC - 50kQx0.1uF
= 0.005 s
Maka sudut picunya :
4> =5.104.v1.10'".y180"
0,01
= 90°
Hasil pengamatan bentuk gelombang picu ini terlihat dari
gambar 4.7.
Gambar 4. 7 Gelombang tegangan picu (trigger ) 90°
Sedangkan hasil pengamatan bentuk gelombang output triac
terlihat dari gambar 4.8.
Gambar 4.8. Gelombang tegangan beban yang dipotong pada 90{
ff/(//f,wi (fa-// ./r//i/j<///(/,i<
35

Perhitungan III. R = 100kn
RC - lOOkQxO.luF
= 0.01 s
Maka sudut picunya :
± 10.1 (^.v1.10 !\y180"<P =
0.01
= 180°
Hasil pengamatan bentuk gelombang picu ini terlihat dari
gambar 4.9.
Gambar 4.9 Gelombang picu (trigger ) 180°
Sedangkan hasil pengamatan bentuk gelombang output triac
terlihat dari gambar 4.10
m
Gambar 4.10. Gelombang output triac yang dipotong pada 180°
••j//(f/rj<f </afi iy ri>ifH(/t<r.'t<u

37
Dari perhitungan diatas dapat kita ketahui bahwa perubahan
nilai tahanan ( R ) berpengaruh terhadap besarnya sudut picu, yang
mengakibatkan berubahnya nilai tegangan output triac dan
kecepatan motor universal.
Tabel hasil pengamatan :
R {kil I+_CM1 (j) (derajat] V (volt) N (rpm)2495
2493
0 0.1 0
3.6
_21_5_2132 0.1
4 0.1 7.2 210 2465
6
8
0.10.1
L 10.8 208 2446
2444
i 2350
14.4 205
u 10 0.1
0.1
18
21.6
202
12 201 2268 J14 ,_ 0.1 25.2 198 2272
20 ^ 0.1 36 u 192 2240 j25 0.1 45 183 2050
30 0.1 54 179 1950
35 0.1 63 178
172
1950
1834 140 0.1 72 445 0.1 81 168 1780
50 0.1 90 164 1620
55 | 0.1 99 154 1510 160 0.1 ' 108 149 1374
75 0.1 135 141 640
80 _Q-1 4 144 138 335
[ 85 t 0.1
oTi
153
.._. 162__j171
136
129
230
90 198095 78
100 o.i , 180 1 0 0
~' jf/f//r.'.(/ (/(f// ./('/////(/f/ff.if,

Dari Tabel diatas dapat diambil beberapa grafik sebagai berikut:
*-" 200ro
CO
150T5*—-
2 100 •O
Q.
3 50 ••a3
to 0 ♦
38
2495 2446 2268 2050 1834 1510 335 0
Putaran (rpm)
Gambar 4.11 Pengaruh sudut picu terhadap putaran motor
Grafik diatas menggambarkan bahwa semakin besar sudut picu maka putaran
motor akan semakin melambat.
200
ro
150I_
V•o"»-^
3 100o
Q.+j
3T3
503
CO
& n# J> ^ & A* A'V K& K&v v <v qr ^J \ N^ NT \J \,°> Q
n?
Tegangan (volt)
Gambar 4.12 Pengaruh sudut picu terhadap besar tegangan
Grafik diatas menggambarkan bahwa semakin besar sudut picu maka
tegangan yang keluar dari triac semakin besar.
JlnaCisa <Dan (PemSaHasan
E.n
o^
120
100 •
cre
re
Ere
I
80 -
60
40
rewd>
CD
20
0 i
O ^ ^ ^ <§> & <^ <£ N#
Sudut Picu (derajat)
NT & ^
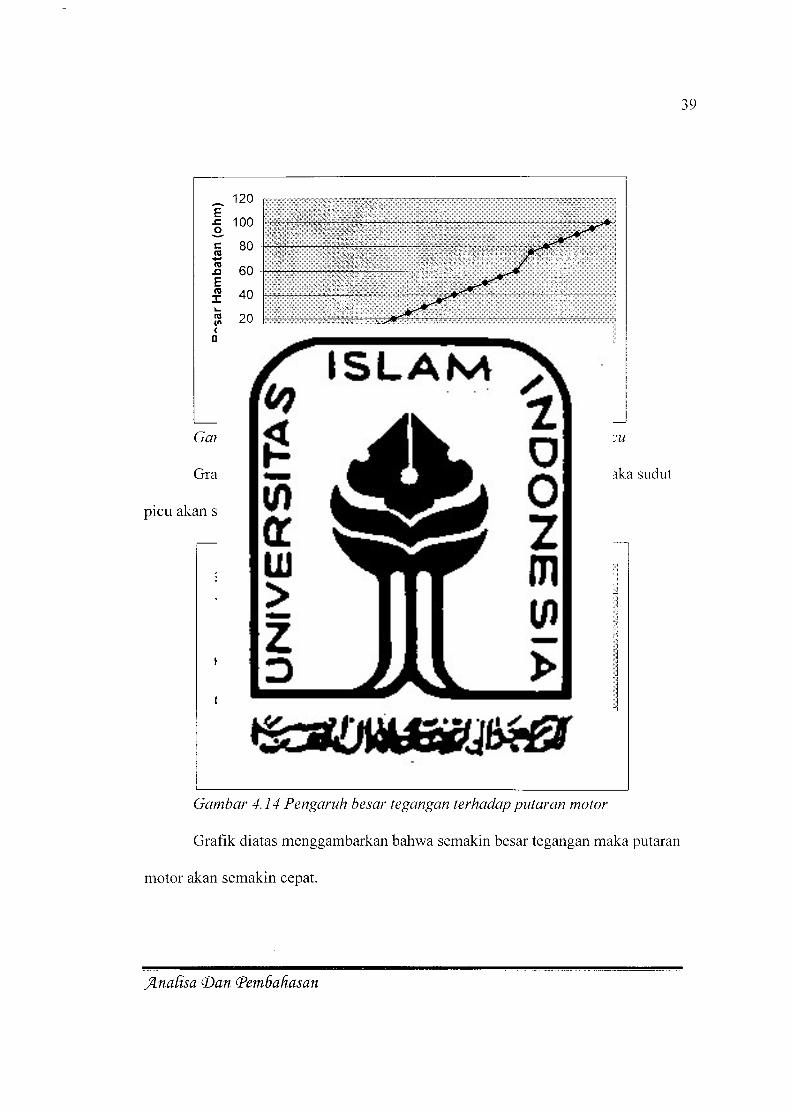
Gambar 4.13 Pengaruh besar hambatan terhadap besar sudutpicu
Grafik diatas menggambarkan bahwa semakin besar hambatan maka sudut
picu akan semakin lebar.
250
o> POO
"*—'
cre
150cre
100
re b(>wa>
m
* N# & $* ^ ^ # / $> / / /Putaran (rpm)
Gambar 4.14 Pengaruh besar tegangan terhadap putaran motor
Grafik diatas menggambarkan bahwa semakin besar tegangan maka putaran
motor akan semakin cepat.
J4.na.Cisa (Dan (pem6altasan

IV.4. Hasil Pengujian
Dalam pengujian sistem yang dibuat, terdapat perubahan
kecepatan motor universal, hal ini dipengaruhi oleh besarnya
tegangan masuk yang telah terlebih dulu dipotong dengan
triac.
>///(///.iff (/(If/ . /(f/l/ltf//(f.i</1/
I MILIU mPCWSTAKAAN-FT,-,
/ YOGVaKARTA

BAB V
PENUTUP
V.l. Kesimpulan
Dari hasil penelitian dapat disimpulkan sebagai berikut:
1. Pengaturan kecepatan motor universal dapat
dilakukan dengan mengubah besar tegangan masuk
motor.
2. Tnac dapat digunakan sebagai pengatur tegangan
AC dengan pengaturan sudut fasanya.
3. Terdapat pengaruh antara besar tegangan dengan
kecepatan.
V.2. Saran
Setelah selesai melaksanakan penelitian ini, maka
Penulis bisa memberikan saran demi perbaikan sistem untuk
masa mendatang :
1. Untuk pengembangan kemampuan sistem dapat
digunakan PC sebagai pengatur sudut fasa triac
sebagai pengendali kecepatan motor universal.
.-7 (•//(/(///u/r.i(iM 41
f7 r//(////ft//-
42
2. Penggunaan motor bisa diganti dengan motor yang
lebih besar dengan mengganti nilai triac yang lebih
besar kemampuannya.
3. Penggunaan beban motor universal ini dapat
diganti dengan beban bola lampu pijar AC.

Daftar Pustaka
1. Woollard Barry G, 1999, Elektronika Praktis,
PT.Pradny^a Paramita, Jakarta.
2. Shrader Robert L., 1991, Komunikasi Elektronika Jilid
J_, Penerbit Erlangga, Jakarta.
3. Gottlieb Irving M., 1993, Electronic Power Control,
Tata McGraw-Hill Publishing Company Limited, New
Delhli.
4. Harten P. Van., Ir. E. Setiawan, 1992, Instalasi Listrik
Arus Kuat, penerbit Bina Cipta, Bandung.
5. Malvino Albert Paul, 1996, Prinsip-Prinsip Elektronika,
Penerbit Erlangga, Jakarta.
6. Zuhal, 1993, Dasar Teknik Tenaga Listrik dan Elektronika Daya,
PT. Gramedia, Jakarta.
7. Fitzgerald AE., 1997, Mesin-Mesin Listrik, Penerbit Erlangga,
Jakarta.
8. Fitzgerald AE, Charles Kingsles, Stephen D. Umans, 1990, Mesin-
mesin listrik, Penerbit Erlangga Jakarta.
(/•afar ?A/J.fd'a

9. L. Kosow Irving, 1964, Electric Machinery and control, Prentice
Hall inc.
10. Langsdorf Alexander S, Theory- of alternating -current
machinery, McGraw-Hill book company, inc. second edition
11. http://vv\vw.teccor.com/an 1003.pdf
12. http://americanmicrosemi.com
iJ (///(/)' ./(/i/((/ca

wi>
w«
3to
<*
s-^

i -
wTHERMOTAB
TO-220AB
(Isolated)
MT2
Thyristor Product Catalog
3
MT1
QUADRAC®Internally Triggered Triacs (4-15 Amps)
General Description
Teccor's QUADRAC® devices are triacs that include a diac trigger mounted inside the same package. This device, developedby Teccor, saves the user the expense and assembly time of buying a discrete diac and assembling in conjunction with a gatedtnac. Also, the Alternistor QUADRAC device (QxxxxLTH) eliminates the need for a snubber network.
The QUADRAC device is a bidirectional AC switch and is gatecontrolled for either polarity of main terminal voltage. Its primarypurpose is for AC switching and phase control applications suchas speed controls, temperature modulation controls, and lightingcontrols where noise immunity is required.
Triac current capacities range from 4 to 15 Amperes withvoltageranges from 200-600 Volts. QUADRAC devices are available inthe TO-220AB package as shown above.
The Thermotab package is electrically isolated to 2,500 V (RMS)from the leads to mounting surface. 4,000 V (RMS) is availableon special order. This means that no external isolation isrequired, thus eliminating the need for separate insulators andinsulator-mounting steps ... saving dollars over "hot tab" devices.
Teccor Electronics
972-580-7777
All Teccor triac and diac chips have glass-passivated junctions toensure long term device reliability and parameter stability.
Variations of devices in this data sheet are available for customdesign applications. Please consult the factory for more information.
FeaturesGlass-passivated junctions
Electrically-isolated packageInternal trigger diac
High surge capability — up to 200 Amps
High voltage capability — 200 up to 600 Volts
http:llwww.teccor.com3- 1

QUADRAC®
•t(rms)
RMS
On-Slate
Current
Conduction
Angle of 360
(5)
Part No.
Isolated
If+>i
MT1 111' TMT2
THERMOTAB
TO-220AB
See "Package Dimensions" sectionfor variations.
4.0 Amps
6.0 Amps
8.0 Amps
10.0 Amps
15.0 Amps
Q2004LT
Q4004LT
Q5004LT
Q6004LT
Q2006LT
Q4006LT
Q5006LT
Q6006LT
Q4006LTH
U5006LTH
Q6006LTH
Q2008LT
Q4008LT
Q5008LT
Q6008LT
Q4008LTH
Q5008LTH
Q6008LTH
Q2010LT
Q4010LT
Q5010LT
Q6010LT
Q4010LTH
Q5010LTH
Q6010LTH
Q2015LT
Q4015LT
Q5015LT
Q6015LT
Q4015LTH
Q5015LTH
Q6015LTH_
VDRM
RepetitivePeak
BlockingVoltage
(D
Volts
500
600
200
j400500
600
400
^500600
500
600
400
500
600_200
400
400
500
200
500
600
400
500
600
'drmPeak Off-State
Current Gate OpenVDRM " Max Rateu Value1
0 >(10
25°C
.05
.05
^05.05
.05
.05
.05
J05
.05
.05
.05
.05
.05
.05
.05
.05
.05
.05
.05
.05
mAmp;
Tc =100°C
MAX
0.5
0.5
0.5
0.5
0.5
0^0.5
_0.50.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
125°C
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2^2.0
2.0
2.0
2.0
2.0_
2.0
^.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
General Notes
All measurements are made at 60Hz with resistive load at an ambient temperature of +25 C unless otherwise specified.
Operating temperature range (Tj) is -40 C to +125 C.
Storage temperature range (Ts) is -40 C to +125 C.Lead solder temperature is a maximum of +230 C for 10 secondsmaximum; > 1/16" (1.59mm) from case.
The case temperature (Tc) is measured as shown on dimensionaloutline drawings. See "Package Dimensions" section of thiscatalog.
hit p.! Iwww.teccor.com
3-2
VTM
Peak On-State
Voltage at
Max Rated
RMS Current
Tc ~- 25'Cin (3)
Volts
MAX
1.6
1.6
1.6
1.6
1.6_1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6
1.6_1.6
1.6
1.6
1.6
1.6
1.6
Thyristor Product Catalog
Trigger Diac SpecificationsJT-MT1)^SVr..0
Breakover
Voltage
Symmetry(7)
MAX
vBO_
Breakover
Voltage
(Forward &Reverse)
(6)
MIN MAX
33
33 43
33 43
33 43
43
33 43
33
33
43
33
33 43
43
43
43
43
43
43
33 43
33 43
33 43
33 43
43
33 43
33 43
33 43
33 43
33
33 43
33 43
33 43
33 43
43
[.W± I
DynamicBreakback
Voltage(Forward &
Reverse)
(6)
Volts
_ 'BO
Peak
Break
over
Current
jiAmps
MAX
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
TriggerFiring
Capacitance
(11)
[iFarads
MAX
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
THERMAL RESISTANCE (STEADY STATE)Rojc [r«ja1 °cw (typ>
TYPE ISOLATED TO-220AB
4.0 Amps 3.6 [50]
6.0 Amps 3.3
8.0 Amps 2.8
| 10.0 Amps 2.6
1 15.0 Amps 2.1
Teccor tlectronics
972-580-7777

Thyristor Product Catalog QUADRAC®
"h 'tsm dv/dt(c) dv/dt
Gate Controlled
Turn-On Time
(6) (9)
uSec
l2t 'gtm di/dt
Holding CurrentGate Open
(1)(2)
mAmps
Peak One
Cycle Surge
(4) (8)
Amps
Critical Rate-of-Rise of
Commutation Voltageat Rated VDRM and
't(RMS) Commutatingdi/dt = 0.54 Rated
'T(RMs/msGate Unenergized
(1)(5)(8)
Volts/nSec
Critical Rate-of-
Rise of Off-State
Voltage at RatedVDRM Gate Open
(1)
Volis/iiSec
RMS Surge(Non-Repetitive)
On-State Current
for period of 8 3msfor Fusing
Amps?Sec
Peak Gale
Trigger Current(10ns Max)
Amps
Maximum
Rste-of-Change ofOn-State Current
(9)
Amps/uSecTc =
100°CTc =
125°C
MAX 60Hz 50Hz MIN MIN TYP
40 55 46 3 75 50 3 12.5 1.2 50
40 55 46 3 75 50 3 12.5 1.2 50
40 55 46 3 50 50 3 12.5 1.2 50
40 55 46 3 50 50 3 12.5 1.2 50
50 80 65 4 150 100 3 26.5 1.5 70
50 80 65 4 150 100 3 26.5 1.5 70
50 80 65 4 125 85 3 26.5 1.5 70
50 80 65 4 125 85 3 26.5 1.5 70
50 80 65 25 575 450 3 26.5 1.5 70
50 80 65 25 500 400 3 26.5 1.5 70
50 80 65 25 425 350 3 26.5 1.5 70
60 100 83 4 175 120 3 41 1.5 70
60 100 83 4 175 120 3 41 1.5 70
60 100 83 4 150 100 3 41 1.5 70
60 100 83 4 150 100 3 41 1.5 70
60 100 83 25 575 450 3 41 1.5 70
60 100 83 25 500 400 3 41 1.5 70
60 100 83 25 425 350 3 41 1.5 70
60 120 100 4 200 150 3 60 1.5 70
60 120 100 4 200 150 3 60 1.5 70
60 120 100 4 175 120 3 60 1.5 70
60 120 100 4-—---
175 120 3 60 1.5 70
60 120 100 925 700 3 60 1.5 70
60 120 100 30 850
775
650
600
3 60 1.5
1.5
70
60 120 100 30 3 60 70
70 200 167 4 300 200 3 166 1.5 100
70 200 167 4 300 200 3 166 1.5 100
70 200 167 4 200 150 3 166 1.5 100
70 200 167 4 200 150 3 166 1.5 100
70 200 167 30 925 700 3 166 1.5 100
10070 200 167 30 850 650 3 166 1.5
70 200 167 30 775 600 3 166 1.5 100
Electrical Isolation
All Teccor isolated QUADRAC packages will withstand a minimum high potential test of 2500VAC (RMS) from leads to mounting tab over the operating temperature range of the device. Seeisolation table for standard and optional isolation ratings.
Teccor Electronics
972-580-7777
ELECTRICAL ISOLATIONFROM LEADS TO MOUNTING TAB **
VAC(RMS) TYPE
2500 Standard
4000 Optional* j
"For 4000 V isolation use "V" suffix.
*' U.L. Recognized File #E71639
http:liwww.teccor.com
3-3

QUADRAC®
Electrical Specification Notes
(1) For either polarity of MT2 with reference to MT1.
(2) See Figure 3.1 for lH vs Tc.
(3) See Figures 3.4 and 3.5 for iT vs vT.
(4) See Figure 3.9 for surge ratings with specific durations.
(5) See Figures 3.6, 3.7, and 3.8 for current rating at specific operating temperature.
(6) See Figures 3.2 and 3.3 for test circuit.
(7) ,wuo = [+ VBO] -!- vBOj.
(8) See Figures 3.7 and 3.8 for maximum allowable case temperatureat maximum rated current.
(9) Trigger firing capacitance = 0.1uF with 0.1us rise time.
(10) Tc = Tj for test conditions in off-state.
(11) Maximum required value to ensure sufficient gate current.
o-. INITIAL ON-STATE CURRENT
°^ 1* \ = 200mA (DC) 4 - 10A
II
o
= 41JUmA (LA,) IDA
h-
X iu"^-•^
0 ^ A 1_-40 »25
Case Temperature (Tq) H25
Figure 3.1 Normalized DC Holding Current vs Case Temperature
Figure 3.2 Test Circuit
i)iip:i iwww.ieccor.com
3-4
MT2
MT1
Thyristor Product Catalog
-vbo
Figure 3.3 Test Circuit Waveforms
Positiveor Negative Instantaneous On-State Voltage(vT) - Volts
Figure 3.4 On-State Current vs On-State Voltage (Typical)
(4-10 Amps)
a -cr. 30) O
a; O0> c
•55 O
r^ \ \
TC = 25 C
15 AMF3 DEVICE S /
j
,
II
Positiveor Negative Instantaneous On-State Voltage(vT)- Volts
Figure 3.5 On-Stale Current vs On-State Voltage (Typical) (15 Amp)
Teccor Electronics
972-580-7777

ThyristorProduct Catalog
\
\4 AM
f
=> DEV CRS
— —
-—
—
\y"
\
\
\
0 0.2 0.4 0.6 0.6 1.0 1.2 1.4 16 18 2.0
RMS On-Stdte Current ;!T,„,,01] - Amps
Figure 3.6 Maximum Allowable Ambient Temperature vs On-StateCurrent
>
CURREN1 WAVEFORM: Sinusoidal
LOAD: Resistive or Inductive
- CONDUCTION ANGLE: 360°
CASh TEMPERATURE: Measured
:i~> sr.cvn on Dimensional Draw'• rq*
^M,p°*^''c*s
2 0 2f> 3 r; 3 5 4 0
RMS On-Stale Cuiier.t [iT(RMS)J
Figure 3.7 Maximum Allowable Case Temperature vs On-StateCurrent (4 Amp)
CURRFNT WAVEFORM Snusoida']LOAD Resistive or SnO'jctwe iCGN'Du'CTiCiJ ANGLE ZCZ; 'CASE TEMPERATURE Ueas'.j'ea ;as shown on Dimensional Drawings ]
Figure 3.8 Maximum Allowable Case Temperature vs On-StateCurrent (6-15 Amp)
Teccor Electronics
972-580-7777
QUADRAC®
1
120; & 100
. GATl ^CL>JIKUI MA-Ut ((jyi
(AJKNP «*[: MM* [.Mil-
IJ1[ WvAl
UNI 1 „Uf^:i L*4 TlMPtRAIURI.
IW5 KHINNH.1 !0STE-AL"5TAI1
(wire: VAlOt
i <D £^
i "S ' 40t
-ij^^^•ii_v. 1 1 tit
1 S s if
1 S - 20
3 o 8I m £ 6! to S .'
i°- c 3 I I
O2
SUPPLY'-R^U'-JENCY rY) H/ £.*-Ls;«;:ol
) 1 1 1 1 1 1 II 1 1 i!i
i j! 2 3 4 5 6 0 10 20 3040 60 60 100 200 300 600 1
Surge Current Duration — full cycles
000
Figure 3.9 Peak Surge current vs Surge Current Duration
CURRENT WAVEFORM: Sinusoida:
LOAD' Resistive or Inductive
" CONDUCTION ANGLE 360
RMS On-State Current [K-n^g,] — Amps
Figure 3.10 Power dissipation (Typical) vs On-State Current (4 Amp)
— /
//
//
/ / 15*AMP DE VICES
6-1 amp r EVICF.S''/
\
,,/y
^/' CURR
-LOAD
CONE
ENT W
Res is
UCTIO
WEFOF\h\: Sinusoidal
,-/f
-J ANGLE: 360
I
y Ic tc
RMSOn-State Current[ly/RMSl^ — Amps
Figure 3.11 Power Dissipation (Typical) vs On-State Current (6-10 and
15 Amp)
http:llwww.ieccor.com3-5

UNIVERSITAS ISLAM INDONESIAFAKULTAS TEKNOLOGI INDUSTRI
KARTU KONSULTAS1 BIMBINGAN TUGAS AKHIR
• b'\.4;\...^y.<Vv;^....^^H.W:^.... Tanda Tangan MhsNama
Nomor Mhs
NIRM
Jurusan
Pembimbing I
Pembimbing II
Proposal Disetujui Tanggal:
Judu. Tugas Akhir : ^Y,^....^^^^
No. | Tanggal
\ eV- VvA- K/1\V-.V;-\V..v..
.."V.XJ.\\N:\ v\ ,">.6-.\.... - •-^"^•• '̂
?)^r>->- '\s.\vivXi
Keterangan
Av,
(lx^ /Uu-<v\ A ''A- •*-c
&h^^ ^^c^_t^
Uz^.„
.VO.vInC.
T.Tangan Pembimbing
/^'^^l<^<.
/^y^^/t^-i^IA-
<J/lS-rt/^f/^hfl/C*,,(U.
'7^-nh
Pembimbing II
/V-J^^^c^ ^-'^ K....\