root locus - anugerahf.files.wordpress.com · n mencari akar-akar persamaan karakteristik untuk...
TRANSCRIPT

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 1 dari 28
ROOT LOCUS
Ì Pendahuluan
Ì Dasar Root Locus
Ì Plot Root Locus
Ì Aturan-Aturan Penggambaran Root Locus
Ì Root Locus Melalui MATLAB
Ì Kasus Khusus
Ì Analisis Sistem Kendali Melalui Root Locus
Ì Root Locus untuk Sistem dengan
Transport Lag

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 2 dari 28
Ì PENDAHULUAN
n Karakteristik tanggapan transient sistem looptertutup dapat ditentukan dari lokasi pole-pole (looptertutupnya).
n Bila K berubah, maka letak pole-pole nya jugaberubah.
n Perlu pemahaman pola perpindahan letak pole-poledalam bidang s.
n Desain sistem kendali melalui gain adjusment: pilihK sehingga pole-pole terletak ditempat yangdiinginkan.
n Desain sistem kendali melalui kompensasi:memindahkan letak pole yang tak diinginkan melaluipole-zero cancellation.
n Mencari akar-akar persamaan karakteristik untukorde tinggi sulit, terlebih dengan K sebagai variabel.(Alternatif: gunakan MATLAB ?!)
n W.R. Evan mengembangkan metoda untuk mencariakar-akar persamaan orde tinggi : metoda RootLocus.
n Root Locus: tempat kedudukan akar-akar persamaankarakterstik dengan K = 0 sampai K = tak hingga.
n Melalui Root Locus dapat diduga pergeseran letakpole-pole terhadap perubahan K, terhadappenambahan pole-pole atau zero-zero loop terbuka.

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 3 dari 28
Ì DASAR ROOT LOCUS
Persamaan Karakteristik: s2 + 2s + K =0
Akar-akar Persamaan Karakteristik :
sK
K=− ± −
= − ± −2 4 4
21 1
K s1 s2
0 0 -21 -1 -12 -1+j1 -1+j1
10 -1+j3 -1+j3101 -1+j10 -1+j10

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 4 dari 28
n Root Locus mempunyai sifat simetri terhadap sumbunyata.
n Root Locus bermula dari pole-pole G(s)H(s) (untukK=0) dan berakhir di zero-zero G(s)H(s) (untukK→∞) termasuk zero-zero pada titik takhingga.
n Root Locus cukup bermanfaat dalam desain sistemkendali linear karena Root Locus dapat menunjukkanpole-pole dan zero-zero loop terbuka mana yangharus diubah sehingga spesifikasi unjuk kerja sistemdapat dipenuhi.
n Pendekatan desain melalui Root Locus sangat cocokditerapkan untuk memperoleh hasil secara cepat.
n Sistem kendali yang membutuhkan lebih dari 1parameter untuk diatur masih dapat menggunakanpendekatan Root Locus dengan mengubah hanya 1parameter pada satu saat.
n Root Locus sangat memudahkan pengamatanpengaruh variasi suatu parameter (K) terhadap letakpole-pole.
n Sketsa Root Locus secara manual tetap dibutuhkanuntuk dapat memahaminya dan untuk memperolehidea dasar secara cepat, meskipun MATLAB dapatmelakukannya secara cepat dan akurat.
n Spesifikasi transient (koefisien redaman) dapatditentukan dengan mengatur nilai K melalui RootLocus.

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 5 dari 28
Ì PLOT ROOT LOCUS
Persamaan Karakteristik: 1 + G(s)H(s) = 0Atau:
G(s)H(s) = -1,Sehingga:
øG(s)H(s) = ! 1800(2k+1); (syaratsudut)
k = 0, 1, 2, ….
| G(s)H(s)| = 1 (syarat magnitude)

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 6 dari 28
Ì PROSEDUR PENGGAMBARAN ROOT LOCUS
1. Letakkan pole-pole dan zero-zero loop terbuka padabidang s.
2. Tentukan Root Locus pada sumbu nyata.
• Syarat Sudut:øG(s)H(s) = ! 1800(2k+1); k = 0, 1, 2, ….
• Ambil titik test : bila jumlah total pole dan zerodikanan titik ini ganjil, maka titik tsb terletak di RootLocus.
3. Tentukan asimtot Root Locus:
• Banyaknya asimtot = n – mn = banyaknya pole loop terbukam= banyaknya zero loop terbuka
• Sudut-sudut asimtot = mn
1)(2k1800
−+±
k=0, 1, 2, …
• Titik Potong asimtot-asimtot pada sumbu nyata:
( ) ( )mn
berhinggazeroletakberhinggapoleletak
−
−= ∑∑
aσ

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 7 dari 28
4. Tentukan titik-titik break-away dan titik-titik break-in:
Untuk Persamaan Karakteristik:
B(s) + KA(s) = 0,
Maka titik-titik tsb harus berada di Root Locus danmemenuhi persamaan:
0)(
)()()()(2
''
=−
−=sA
sAsBsAsB
ds
dK
5. Tentukan sudut-sudut datang / sudut-sudut berangkatuntuk pole-pole / zero-zero kompleks sekawan.
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 8 dari 28
6. Tentukan batas kestabilan mutlak sistem (K):
• Melalui Kriteria Routh Hurwitz.• Secara analitis: memotong sumbu imajiner: s = jz
7. Sketsa Root Locus secara lebih teliti pada daerah-daerah selain sumbu nyata dan asimtot.
8. Tentukan letak pole-pole melalui nilai K yangmemenuhi syarat magnitude. Sebalikya, bila letak pole-pole ditentukan (pada Root Locus), maka nilai K yangmemenuhi dapat dihitung secara grafis atau secaraanalitis:
Secara grafis:

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 9 dari 28
CONTOH 1:

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 10 dari 28
CONTOH 2:

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 11 dari 28
Ì BEBERAPA CATATAN
• Konfigurasi pole-zero yang sedikit bergeser dapatmengubah total bentuk Root Locus.
• Orde sistem dapat berkurang akibat pole-pole G(s) di‘hilang’kan (cancelled) oleh zero-zero H(s)
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 12 dari 28
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 13 dari 28

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 14 dari 28
Ì ROOT LOCUS MELALUIMATLAB

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 15 dari 28
Ì KASUS KHUSUS] Parameter K bukan penguatan loop terbuka.] Umpanbalik positif.
] Parameter K bukan Penguatan LoopTerbuka.

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 16 dari 28

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 17 dari 28
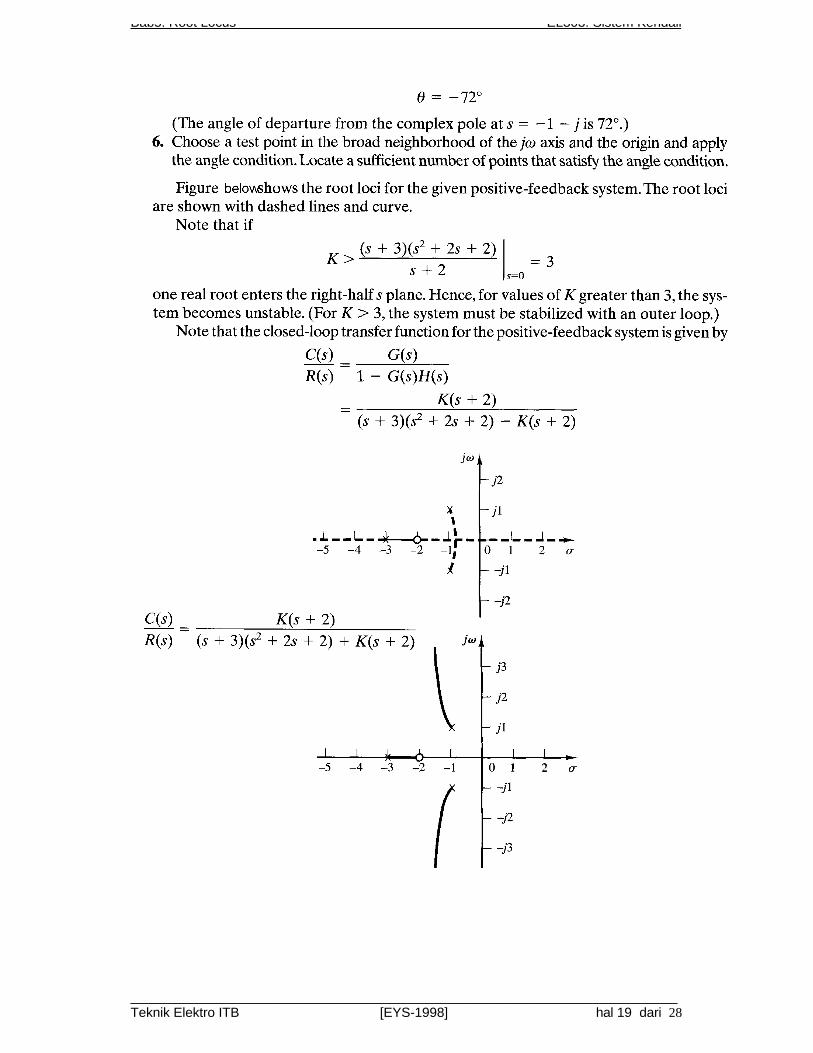
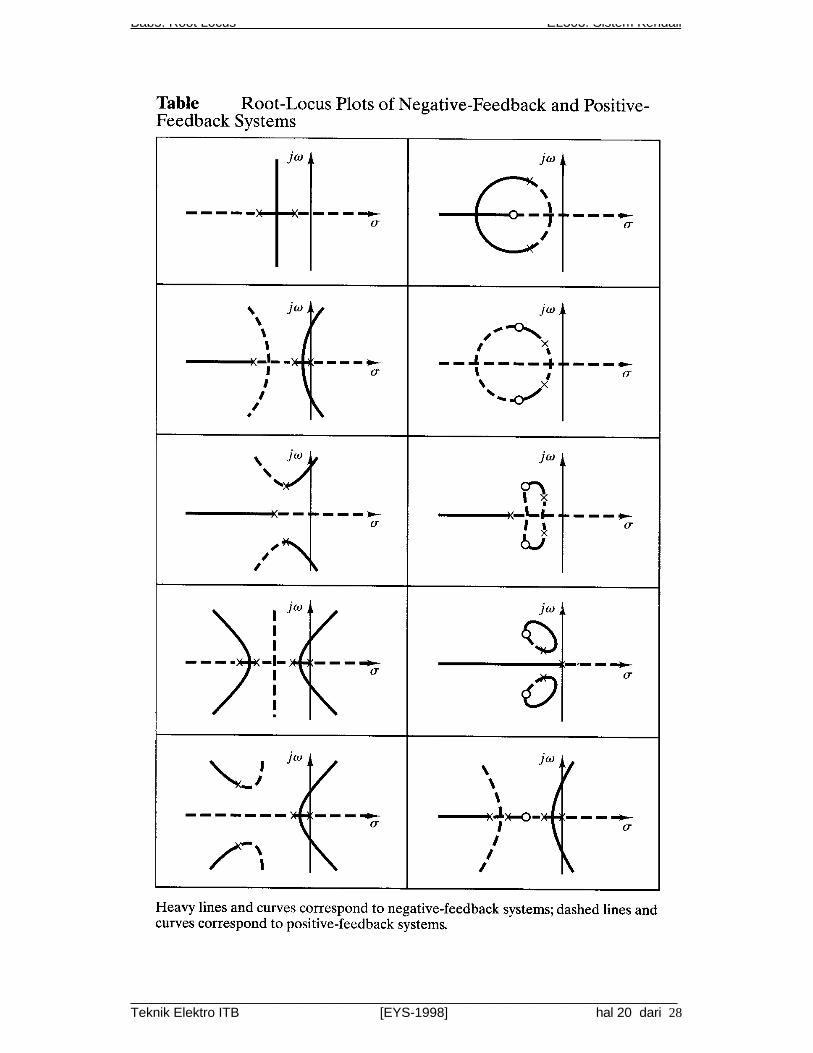
] Umpanbalik Positif.
• Modifikasi Aturan
2. Bila jumlah total pole dan zero dikanan titik test,maka titik tsb berada di Root Locus.
3. Sudut-sudut asimtot = mn
036 0
−± k
; k=0, 1, 2, …
5. Sudut datang dan sudut pergi : 1800 diganti dengan00.

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 18 dari 28
Contoh:
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 19 dari 28
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 20 dari 28
Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 21 dari 28
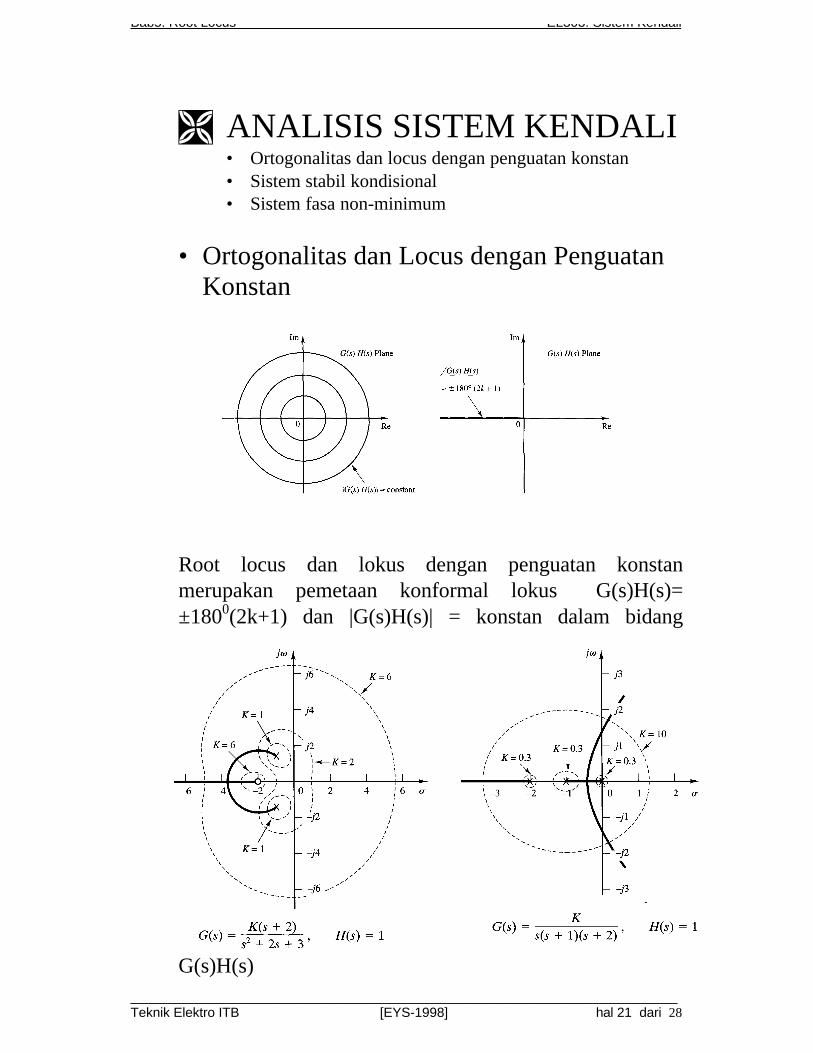
Ì ANALISIS SISTEM KENDALI• Ortogonalitas dan locus dengan penguatan konstan• Sistem stabil kondisional• Sistem fasa non-minimum
• Ortogonalitas dan Locus dengan PenguatanKonstan
Root locus dan lokus dengan penguatan konstanmerupakan pemetaan konformal lokus ∠G(s)H(s)=±1800(2k+1) dan |G(s)H(s)| = konstan dalam bidang
G(s)H(s)

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 22 dari 28
• Sistem Stabil Kondisional
• Sistem stabil untuk 0 < K < 14 dan64<K <195
• Prakteknya stabil kondisional tak diinginkan, karenasistem mudah menjadi tak stabil.
• Stabil kondisional dapat etrjadi pada sisetm denganlintasan maju tak stabil (karena ada minor loop).
• Stabil kondisional dapat dihindari melaluikompensasi yang sesuai (penambahan zero).

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 23 dari 28
• Sistem Fasa Non-Minimum(Pergeseran fasa bila diberi input sinus)
• Sistem fasa minimum: bila semua pole dan zerosistem loop terbuka terletak disebelah kiri bidang-s.
• Sistem fasa non-minimum: bila sedikitnya adasatu pole atau zero sistem loop terbuka terletakdisebelah kanan bidang-s.
= ±1800 (2k+1); k= 0, 1, 2, … Sehingga:
0
0)1(
)1(=
+−
∠Tss
sTK a

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 24 dari 28
Ì ROOT LOCUS DENGANTRANSPORT LAG
• Transport lag / Dead Time: keterlambatan pengukuranakibat sifat kelembaman sistem fisis.
• Elapse time: T = L/v detik,• Sehingga : y(t) = x(t-T)• Fungsi Alih:

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 25 dari 28
Contoh:

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 26 dari 28

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 27 dari 28
Dead Time menyebabkan ketidakstabilan sistem, sekalipununtuk sistem orde-1Pendekatan Transport Lag

Bab5: Root Locus EL303: Sistem Kendali
__________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 28 dari 28
• Bila T kecil sekali dan fungsi f(t) pada elemen tsbkontinyu dan smooth:
• Pendekatan Lain: