novita ariyani nim : 150309264391 program studi alat...
TRANSCRIPT

RANCANG BANGUN SIMULASI KECEPATAN PUTARAN MOTOR DC
COOLING FAN TERHADAP TEMPERATUR DENGAN
MENGGUNAKAN SISTEM FUZZY LOGIC CONTROL
TUGAS AKHIR
KARYA TULIS INI DIAJUKAN SEBAGAI SALAH SATU SYARAT
UNTUK MEMPEROLEH GELAR AHLI MADYA DARI POLITEKNIK
NEGERI BALIKPAPAN
NOVITA ARIYANI
NIM : 150309264391
PROGRAM STUDI ALAT BERAT
JURUSAN TEKNIK MESIN
POLITEKNIK NEGERI BALIKPAPAN
2018
ii
LEMBAR PERSETUJUAN TUGAS AKHIR
iii
SURAT PERNYATAAN

iv
SURAT PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH
KEPENTINGAN AKADEMIS

v
LEMBAR PERSEMBAHAN
Tugas Akhir ini kupersembahkan kepada
Ayahanda dan ibunda tercinta
Bpk. Abdul Gani (Alm) dan Ibu. Sumarni,
Saudara yang kusayangi
Gunawan seniardi
Sri sundari
Yudi santoso
Didi darmadi
Putri suciati
Keluarga besar Teknik
Mesin Alat Berat 2015

vi
ABSTRACT
The cooling system has functions to keep the engine or engine's heat temperature
to remain stable and does not overheat, the heat of engine is generated from
burning the fuel in the cylinder. The heat is a matter that is intentionally created
to produce energy, but if it left unchecked, it will cause excessive heat (over
heating effect). Excessive heat can damage other components. Therefore it is
necessary to design a simulation of rotational speed of DC motor cooling fan with
temperature using a fuzzy logic control system to make the dc motor rotation
speed stable. Based on testing, the sensor that was used could work well that
produces temperature readings in units of degrees Celsius and the output used
works well, namely the rotating fan according to the PWM program which was set
through the Fuzzy Logic control. sensor reading input Ds18b20 and DHT22. The
fuzzy control design was done grouping the sensor and PWM reading fan rotation
into several membership inputs and outputs. For sensors from DS1820b, the
range was low from 40C to 55C, for the medium range from 45C to 65C, and
for the high range 55C to 70C. For sensors from DHT22, the range was low
from 50C to 65C, for the medium range from 55C to 75C, and for high ranges
from 65C to 70C. For PWM fan settings, the range was low from 0 to 125, for
the medium range from 50 to 200, and for the high range 125 to 250. In making
Fuzzyini Logic control, there are 27 rule (rules) relationships between input and
output.
Keywords: Cooling Can, Fuzzy Logic Control, DC Motor, Ds18b20 Sensor,
Dht22 Sensor.

vii
ABSTRAK
Cooling System berfungsi untuk menjaga temperatur panas engine atau mesin
agar tetap setabil dan tidak terjadi over heating ( panas berlebihan ), Panas mesin
dihasilkan dari pembakaran bahan bakar dalam silinder. Panas tersebut merupakan
suatu hal yang sengaja diciptakan untuk menghasilkan tenaga, namun jika
dibiarkan akan menimbulkan panas yang berlebihan (over heating effect). Panas
yang berlebihan dapat merusak komponen- komponen lain. Sehingga diperlukan
rancangbangun simulasi kecepatan putaran motor DC cooling fan terhadap
temperatur dengan menggunakan sistem fuzzy logic control untuk membuat
kecepatan putaran motor dc menjadi stabil. Berdasarkan pengujian, sensor yang di
gunakan bekerja dengan baik yaitu menghasilkan pembacaan suhu dalam satuan
derajat Celsius serta output yang digunakan bekerja dengan baik yaitu kipas
berputar sesuai program PWM yang diatur melalui kendali Logika Fuzzy.Kendali
fuzzy yang digunakan untuk mengatur putaran kipas DC 12 Volt dengan input
pembacaan sensor Ds18b20 dan DHT22. Dimana untuk perancangan kendali
fuzzy dilakukan pengelompokan pembacaan sensor dan PWM putaran kipas
kedalam beberapa membership input dan output. Untuk sensor dari Ds1820b,
range rendah dari 40C sampai 55C, untuk range sedang dari 45C sampai 65C,
dan untuk range tinggi 55C sampai 70C. Untuk sensor dari DHT22, range
rendah dari 50C sampai 65C, untuk range sedang dari 55C sampai 75C, dan
untuk range tinggi 65C sampai 70C. Untuk pengaturan PWM kipas, range
rendah dari 0 sampai 125, untuk range sedang dari 50 sampai 200, dan untuk
range tinggi 125 sampai 250. Dalam pembuatan kendali Logika Fuzzyini dibuat 27
rule (aturan) hubungan antara input dan output.
Kata kunci: Cooling Fan, Fuzzy Logic Control, Motor DC, Sensor Ds18b20,
Sensor Dht22.

viii
KATA PENGANTAR
Syukur Alhamdulillah senantiasa penulis haturkan kepada Allah Subhanahu
Wata’ala yang telah memberikan banyak nikmat, taufik dan hidayahnya, sehingga
penulis dapat menyelesaikan Tugas Akhir ini. Pembuatan Tugas Akhir yang akan
menjadi syarat kelulusan pada program D3 atau sebuah pengajuan judul untuk
Tugas Akhir yang akan di buat.
Penulis menyadari bahwa semua ini tidak akan berjalan dengan lancar tanpa
adanya dukungan dari berbagai pihak, oleh karena itu perkenankanlah penulis
menyampaikan ucapan terima kasih yang sebesar - besarnya kepada :
1. Bapak Ramli S.T,.,M.M., selaku Direktur Politeknik Negeri Balikpapan.
2. Bapak Zulkifli S.T,M.T sebagai ketua Program Studi Jurusan Teknik Mesin
Alat Berat.
3. Bapak Subur Mulyanto,S.pd.,M.T. sebagai Ketua Bengkel Jurusan TMAB
Politeknik Negeri Balikpapan.
4. Bapak Randis S.T,M.T sebagai dosen pembimbing 1 atas bimbingan dan
saran-sarannya.
5. Bapak Hadi Hermansyah,S.Si.,M.Si. sebagai dosen pembimbing 2 atas
bimbingan dan saran-sarannya.
6. Kepada ( Alm ) Ayah, Ibu, dan kakak tercinta yang senantiasa memberikan
semangat dan motivasi yang tiada terkira baik moril maupun materil, terima
kasih atas do’a dan dorongannya untuk menjadi anak yang berbakti dan
berguna pada masa yang akan datang.
7. Seluruh Mahasiswa/i Politekni Negri Balikpapan terutama Jurusan Teknik
Mesin Alat Berat yang telah membantu secara langsung maupun tidak
langsung dalam penyusunan tugas akhir ini hingga selesai.
8. Kepada Riskha Mirandha Hamid yang telah membantu hingga selesainya
tugas akhir penulis
9. Semua pihak yang penulis tidak dapat menyebutkan satu persatu, yang telah
memberikan bantuan secara langsung maupun tidak langsung dalam
penyusunan tugas akhir ini hingga selesai.

ix
Semoga amal dan kebaikan serta dukungan yang telah diberi kepada
penulis mendapatkan pahala dari ALLAH SWT. Dalam penyusunan Laporan ini.
Penulis menyadari masih jauh dari kesempurnaan, untuk itu Penulis sangat
mengharapkan kritik dan saran untuk perbaikan dimasa mendatang. Akhir kata
semoga laporan ini bermanfaat bagi penulis maupun pembaca.
Balikpapan, 02 juli 2018
Novita Ariyani

x
DAFTAR ISI
LEMBAR PERSETUJUAN TUGAS AKHIR........................................................ ii
SURAT PERNYATAAN....................................................................................... iii
SURAT PERNYATAAN PERSETUJUAN PUBLIKASI .................................... iii
LEMBAR PERSEMBAHAN .................................................................................. v
ABSTRACT ............................................................................................................. vi
ABSTRAK ............................................................................................................ vii
KATA PENGANTAR ......................................................................................... viii
DAFTAR ISI ............................................................................................................ x
DAFTAR GAMBAR ............................................................................................ xii
DAFTAR TABEL ................................................................................................ xiv
BAB I PENDAHULUAN ........................................................................................ 1
1.1 Latar Belakang ................................................................................................. 1
1.2 Rumusan Masalah ............................................................................................ 2
1.3 Batasan Masalah............................................................................................... 3
1.4 Tujuan Penelitian ............................................................................................. 3
1.5 Manfaat Penelitian ........................................................................................... 3
1.6 Sistematika Penulisan ...................................................................................... 4
BAB II LANDASAN TEORI .................................................................................. 5
2.1 Tinjauan Pustaka ............................................................................................... 5
2.2 Landasan Teori .................................................................................................. 8
2.2.1 Tipe Pendinginan Media Udara .................................................................. 9
2.2.2 Tipe Pendinginan Media Air ....................................................................... 9
2.2.3 Sistem Pendingin Penggerak Mekanik ........................................................ 10
2.2.4 Sistem Pendingin Penggerak Hidrolik ......................................................... 12
2.2.4.1 Hydraulic Fan motor ................................................................................. 12
2.2.4 Sensor Temperatur ....................................................................................... 18
2.2.5 Motor DC ..................................................................................................... 19
2.2.6 Kipas ............................................................................................................ 25
3.3 Fuzzy Logic ..................................................................................................... 28
3.3.1 Himpunan Fuzzy .......................................................................................... 28
3.3.2 Fungsi keanggotaan ...................................................................................... 28
3.3.3 Kendali Logika Fuzzy .................................................................................. 32
24. Metode Mamdani ............................................................................................ 34

xi
2.4.1 Pembentukan himpunan fuzzy ...................................................................... 34
2.4.2 Aplikasi fungsi implikasi ............................................................................. 34
2.4.3 Komposisi aturan ......................................................................................... 34
2.4.4 Penegasan (defuzzyfikasi) ............................................................................. 35
BAB III METODOLOGI PENELITIAN............................................................... 37
3.1 Tempat dan Waktu Penelitian ......................................................................... 37
3.2 Alat dan Bahan Yang Digunakan .................................................................... 37
3.3 Diagram Alir Penelitian .................................................................................. 41
3.4 Diagram Blok .................................................................................................. 42
3.5 Diagram Tulang Ikan ...................................................................................... 43
3.6 Jadwal Penelitian ............................................................................................. 43
BAB IV HASIL DAN PEMBAHASAN ............................................................... 44
4.1 Perancangan .................................................................................................... 44
4.1.1 Perancangan Sistem Elektrikal .................................................................... 44
4.1.2 Perancangan Mekanikal ............................................................................... 45
4.2 Proses Pembuatan Program ............................................................................. 46
4.2.1 Penjelasan Program ...................................................................................... 47
4.2.2Prinsip Kerja ................................................................................................. 50
4.3 Proses Pembuatan Alat .................................................................................... 53
4.3.1 Job Safety Analysis ...................................................................................... 53
4.3.2 Langkah –Langkah Pembuatan .................................................................... 56
4.3.3 Waktu Pengerjaan dan Pembuatan tool........................................................ 59
4.3.4 Biaya Pembuatan .......................................................................................... 59
4.4 Pengujian Alat ................................................................................................. 60
4.4.1 Pengujian Mikrokontroller Arduino Uno ..................................................... 62
4.4.2 Pengujian Sensor Suhu DHT 22 dan Sensor Suhu DS18B20 ...................... 63
4.4.3 Pengujian LCD ............................................................................................. 63
4.4.4 Pengujian Alat Keseluruhan ......................................................................... 64
4.5 Perawatan dan Penyimpanan .......................................................................... 73
BAB V KESIMPULAN DAN SARAN ................................................................. 73
5.1 Kesimpulan ..................................................................................................... 73
5.2 Saran ................................................................................................................ 73
DAFTAR PUSTAKA ............................................................................................ 74

xii
DAFTAR GAMBAR
Gambar 2.1 Cooling System menggunakan media udara ........................................ 9
Gambar 2.2 Cooling System menggunakan media air ........................................... 10
Gambar 2.3 Cara kerja cooling system menggunakan media air ........................... 11
Gambar 2.4Hydraulic Fan PC1250-8R .................................................................. 13
Gambar 2.5 Pinsip Kerja Hydraulic Fan Motor ..................................................... 14
Gambar 2.6 Pergerakan Piston pada Hydraulic Fan Motor ................................... 14
Gambar 2.7 Hydraulic Fan Motor ketika Hydraulic Fan Pump bekerja ................ 15
Gambar 2.7 Hydraulic Fan Motor ketika Hydraulic Fan Pump berhenti ............... 16
Gambar 2.8 Hydraulic Fan Motor ketika Selenoid ON-OFF tidak aktif ............... 17
Gambar 2.9 Hydraulic Fan Motor ketika Selenoid ON-OFFaktif ......................... 17
Gambar 2.10 Safety Valve ..................................................................................... 18
Gambar 2.11 Motor DC Sederhana ........................................................................ 20
Gambar 2.12 Medan magnet yang membawa arus mengelilingi konduktor ......... 22
Gambar 2.13 Reaksi garis fluks ............................................................................. 22
Gambar 2.14 Prinsip kerja motor DC .................................................................... 23
Gambar 2.15 Grafik kurva torsi dan kecepatan ..................................................... 24
Gambar 2.16 Grafik torsi dan kecpatan dengan luas daerah persegi ..................... 25
Gambar 2.17 Kipas atau fan ................................................................................... 26
Gambar 2.18 Fungsi keanggotaan segitiga ............................................................ 29
Gambar 2.19 Fungsi keanggotaan trapezium ......................................................... 30
Gambar 2.20 Fungsi keanggotaan Gaussian .......................................................... 31
Gambar 2.21 Fungsi keanggotaan lonceng ............................................................ 31
Gambar 2.22 Fungsi keanggotaan sigmoidal ......................................................... 32
Gambar 2.23 Struktur dasar kendali logika fuzzy................................................... 32
Gambar 2.24 Prinsip proses fuzzyfkasi ................................................................... 33
Gambar 2.25 Bentuk matrik basis kaidah dengan dua variable input .................... 34
Gambar 2.26 Proses Defuzzifikasi ......................................................................... 36
Gambar 3.1 Flow Chart ......................................................................................... 41
Gambar 3.2 Diagram Blok ..................................................................................... 42
Gambar 4.1 Perancangan Electrikal ....................................................................... 44
Gambar 4.2 Autocad .............................................................................................. 46
Gambar 4.3 Proses Pembuatan Program ................................................................ 46
Gambar 4.4 Sistem Pemprograman........................................................................ 47
xiii
Gambar 4.2 Diagram Alur fuzzy logic.................................................................... 52
Gambar 4.4 Kotak Penempatan Komponen ........................................................... 56
Gambar 4.5 Penempatan Kipas .............................................................................. 56
Gambar.4.6 Peletakan Komponen Pada Kotak ...................................................... 56
Gambar 4.7 Pengkoneksian sensor dht22 .............................................................. 57
Gambar 4.8 Pengkoneksian sensor ds18b20 .......................................................... 57
Gambar 4.9 Penempatan LCD ............................................................................... 57
Gambar 4.10 Pengoneksian LCD ........................................................................... 58
Gambar 4.11 Pengkoneksian driver motor dengan kipas ...................................... 58
Gambar 4.12 Check Komponen-Komponen .......................................................... 58
Gambar 4.10 Pengujian Kontroler Arduino Uno .................................................. 63
Gambar 4.11 Pengujian LCD ................................................................................. 64
Gambar 4.12 Penempatan Sensor .......................................................................... 64
Gambar 4.13 Membership Function Input ............................................................. 65
Gambar 4.14 Membership Function Input ............................................................. 65
Gambar 4.15 Membership Function Input ............................................................. 66
Gambar 4.16 Membership Function Output .......................................................... 66
Gambar 4.17 Pembuatan Rule................................................................................ 69
Gambar 4.18 diagram surface viewer .................................................................... 70
Gambar 4.19 Battery .............................................................................................. 70
Gambar 4.20 Sensor 1 ............................................................................................ 71
Gambar 4.21 Sensor 2 ............................................................................................ 71
Gambar 4.22 Kipas Berputar.................................................................................. 71
Gambar 4.23 LCD Telah Bekerja .......................................................................... 72
Gambar 4.24 sereal monitor .................................................................................. 72

xiv
DAFTAR TABEL
Tabel 3.1 Alat dan Bahan Yang Digunakan........................................................... 37
Tabel 3.2 Bahan ..................................................................................................... 38
Tabel 3.4 Jadwal Penelitian.................................................................................... 43
Tabel 4.1 Job Safety and Analysis Pembuatan Tool .............................................. 54
Tabel 4.2 Biaya Pembuatan Tool ........................................................................... 59
Tabel 4.3 Pengujian Alat ........................................................................................ 60
Tabel 4.3 Tabel Hasil Percobaan Mikrokontroler Arduino ................................... 62
Tabel 4.5 Pengujian Sensor Suhu DHT 22 dan Sensor Suhu DS18B20 ................ 63
Tabel 4.6 Hasil Kecepatan Putaran Kipas .............................................................. 73

1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Salah satu komponen-komponen sistem pendingin kendaraan adalah kipas
atau cooling fan. Aliran udara yang disebabkan ketika kendaraan berjalan belum
mampu memberikan pendiginan yang cukup sehingga diperlukan komponen-
komponen tambahan yaitu kipas pendingin. Kipas pending ini berfungsi untuk
membantu mendinginkan radiator dengan cara membuat udara dapaat mengalir
melewati sirip-sirip radiator. Udara akan menyerap panas dari sirip-sirip radiator
sehingga temperature air pendingin pada radiator dapat diturunkan. Kipas
pendingin radiator diletakkan dibelakang radiator cara kerja dari kipas pendingin
ini dibedakan menjadi dua berdasarkan pada penggerak kipasnya yaitu kipas
pendinginya yang digerakkan oleh poros engkol dan kipas pendingin yang
digerakkan oleh motor listrik. Kipas pendingin yang digerakkan oleh poros
engkol, pada tipe kipas pendingin yang digerakkan oleh poros engkol. Kipas ini
akan bergerak secara terus menerus ketika mesin dihidupkan. Kipas pendingin ini
dihubugkan dengan poros engkol poros engkol melalui pulli (pulli poros dan pulli
kipas) dan sabuk (v-belt). Kecepatan putaran dari kipas pendingin tipe ini juga
tergantung dari kecepatan putaran mesin, apabila kecepatan mesin tinggi maka
putaran kipas pendingin juga akan semakin cepat dan sebaliknya apabila
kecepatan putaran mesin rendah maka putaran kipas pendingin akan menjadi
lambat. Kipas pendingin ini umumnya dipasangkan didepan pompa air (water
pump). Gerakan kipas pendingin yang diambil dari putaran poros engkol ini akan
menambah beban dari mesin. Jika beban mesin bertambah maka pemakaian atau
konsumsi bahan bakar juga akan meningkat. Oleh sebab itu pada umumnya kipas
pendingin tipe ini menggunakan kopling fluida (sealed silicone oil) yang
dipasangkan antara pompa air dengan kipas pendingin untuk mengatasi masalah
tersebut.
Sedangkan kipas yang digerakkan oleh motor listrik ini sudah tidak
memanfaatkan putaran poros engkol untuk memutarkan kipas pendingin. Motor
listrik ini dapat bergerak atau berpuar jika ada arus listrik yang mengalir ke
motor listrik tersebut. Tipe motor listrik yang digunakaan adalah jenis arus

2
searah. Pada tipe kipas pendingin yang digerakkan oleh motor listrik ini
mengguakan sensor temperatur air pendingin atau Water Temperature Sensor
(WTS). Sensor suhu air pendingin ini akan mendetaksi suhu air pada mesin,
bila suhu air telah mencapai batas yang ditetapkan maka sensor ini akan
mengirimkan data ke ECU sehingga ECU akan memberikan signal tegangan ke
relay fan sehingga relay fan aktif dan arus listrik dapat mengalir ke motor listrk
dan akhirnya motor listrik dapat bekerja. Hal teersebut menunjukkan bahwa
kipas pendingin radiator akan bekerja jika temperatur air pendingin mesin telah
mencapai batas yang ditentukan (antara 800 C sampai 90
0 C).
Hal tersebut akan memberikan banyak keuntungan pada kipas pendingin pada
kipas pendingin tipe ini, yaitu temperatur kerja mesin dapat dicapai dengan
cepat dan juga karena gerakan putarannya diambil dari motor listrik maka
mesin tidak akan terbebani untuk memutar kipas pendingin.
Penelitian yang akan di kembangkan yaitu rancang bangun simulasi kecepatan
putaran motor Direct current (DC) cooling fan terhadap temperatur dan tekanan
dengan menggunakan sistem fuzzy logiccontrol, sensor tekanan dan sensor
temperatur akan menjadi inputan untuk mengatur putaran pada motor cooling fan
yang di control dengan mikrokontroler secara fuzzy logic control, dengan adanya
alat simulasi ini di harapkan mahasiswa dapat mempraktekkan ilmu yang
diperoleh dengan menggunakan alat simulasi selama di perkuliahan untuk lebih
memperdalam pemahaman mahasiswa/i yang telah di dapat. Dengan ini penulis
tertarik untuk membuat alat simulasi, dengan menggunakan sistem Fuzzy Logic
control.Fuzzy Logic control digunakan pada cooling system engine, guna
meningkatkan efektifitas pendinginan.
1.2 Rumusan Masalah
Dengan melihat latar belakang yang telah dikemukakan, maka dapat diambil
perumusan masalah dalam penulisan tugas akhir ini sebagai berikut:
1. Apa saja yang mempengaruhi putaran kipas?
2. Bagaimana sistem kerja pada cooling sistem?
3
1.3 Batasan Masalah
Untuk mendapatkan hasil penelitian yang sesuai dengan yang diharapkan,
maka disusun batasan masalah guna memperjelas arah dan mengendalikan model
sistem yang hendak dicapai, yaitu sebagai berikut:
1. Rancang Bangun simulasi menggunakan Arduino Uno sebagai controller
2. Sensor yang digunakan untuk memberikan input adalah sensor DS18B20 dan
DHT22.
1.4 Tujuan Penelitian
Adapun tujuan penelitian, selain sebagai syarat mendapatkan gelar Ahli
Madya dari Politeknik Negeri Balikpapan adalah sebagai berikut :
1. Dapat mengetahui apa saja yang mempengaruhi putaran kipas.
2. Dapat mengetahui serta menjelaskan cara kerja sistem simulasi kecepatan
putaran motor DC cooling fan terhadap temperatur dan tekanan dengan
menggunakan sistem fuzzy logic.
1.5 Manfaat Penelitian
Hasil dari penelitian yang telah dilakukan oleh penulis diharapkan dapat
memberi manfaat sebagai berikut :
1. Sebagai referensi bagi peneliti lainnya yang juga ingin membuat suatu inovasi
alat simulasi kecepatan putaran motor DC cooling fan terhadap temperatur
dengan menggunakan sistem fuzzy logic, dan juga dapat memberikan sebagai
bahan pelajaran mahasiswa.
2. Sebagai tambahan inovasi untuk menambagkan pengetahuan serta wawasan
mengenai alat simulasi kecepatan putaran motor DC cooling fan terhadap
temperatur dengan menggunakan system fuzzy logic.
3. Untuk dijadikan bahan masukan bagi perusahaan-perusahaan yang melakukan
penelitian serupa agar dapat dijadikan sebagai pedoman dalam melakukan
penelitian.

4
1.6 Sistematika Penulisan
Untuk mempermudah pembaca dalam memahami isi dari tugas akhir ini,
maka penulis menyusun tugas akhir ini menjadi 5 (lima) bab. Berikut ini adalah
penjelasan tentang isi dari bab-bab yang ada dalam tugas akhir ini.
a. BAB I : PENDAHULUAN
Berisikan pendahuluan yang mencangkup tentang latar belakang, tujuan
penulisan, batasan masalah, tujuan penelitian, manfaat penelitian, dan
sistematika penulisan.
b. BAB II : LANDASAN TEORI
Berisi tentang teori-teori dasar yang berhubungan dengan kajian atau topik
yang dipakai penulis dalam menyelesaikan tugas akhir ini.
c. BAB III : METODOLOGI PENELITIAN
Berisikan tentang tanggal dan waktu penelitian, jenis penelitian, metode
penelitian, dan lampiran data.
d. BAB IV : HASIL DAN PEMBAHASAN
Merupakan rincian tentang hasil penelitian yang terdiri dari data pendukung
dan pembahasan terhadap hasil setiap penelitian tersebut.
e. BAB V : PENUTUP
Terdiri dari kesimpulan dan saran saran. Kesimpulan berisikan tentang
rincian poin poin hasil penelitian sedangkan saran-saran merupakan suatu
kajian tentang kendala, kekurangan pada pelaksanaan penelitian ini agar
pelaksanaan penelitian lanjutan dapat diperbaiki dan disempurnakan.
f. DAFTAR PUSTAKA
Penulis untuk mencari sumber informasi dari berbagai jenis media.
Perkembangan itu diikuti oleh perkembangan berbagai format penulisan
kutipan dan daftar pustaka.
g. LAMPIRAN
Berisikan ketentuan pembuatan lampiran (judul lampiran, isi dan
pengelompokkan lampiran).

5
BAB II
LANDASAN TEORI
2.1 Tinjauan Pustaka
Perkembangan ilmu pengetahuan dan teknologi sistem simulasi ini begitu
cepat, diantaranya adalah teknik alat simulasi, baik dalam teori maupun praktek,
Ada beberapa penelitian yang pernah dilakukan sebelumnya terkait dengan
perancangan sistem ini diantaranya.
a. Qory Hidayati (2016). Pengaturan Kecepatan Motor DC dengan
Menggunakan Mikrokontroler Berbasis Fuzzy PID. Pada penyusunan ini akan
dilakukan pembuatan sebuah mikrokontroler yang berbasis fuzzy-PID
kontroler yang akan mempermudah dalam pengontrolan kecepatan motor arus
searah (DC) yang diaplikasikan pada pengaturan kipas di ruangan. Laporan
ini merupakan perkembangan dari Penelitian sebelumnya, dimana sistem
kontrol fuzzy PID menghasilkan suatu sistem yang lebih fleksibel, mantap dan
memiliki masa transient yang lebih cepat dibanding dengan kontroler fuzzy
dan kontroler PID. Fuzzy PID kontroler akan mengontrol setiap variabel
keadaan motor DC yang terukur untuk diumpanbalikkan. Dengan
menterjemahkan parameter-parameter fisis motor DC menjadi model
matematik dengan menggunakan teori pemodelan sistem yang digunakan
dalam kontrol modern.
b. Fahmizal_note. Pengaturan Kecpatan Motor DC Dengan Mikrokontroler (
Open - Loop) ( 2008 dan 2010 ), Pada penelitian ini Penggunaan motor DC
dewasa ini sudah sangatlah umum, salah satu kelebihan motor DC adalah
relatif gampang didapat dan mudah diatur kecepatan putarnya. Secara umum
pengaturan kecepatan motor DC adalah dengan menggunakan cara analog.
Pada artikel kali ini akan dibahas contoh cara mengatur kecepatan motor DC
dengan menggunakan mikrokontroller. Mikrokontroler yang digunakan
adalah Tipe AVR dari Atmel seperti mikrokontroler Atmega 8535, 16, 32.

6
c. Sodikin Susa’at (Widyaiswara Madya VEDC Malang) ( 2014 – 2015 ).
Kontrol Kecepatan Motor DC Berbasis Logika Fuzzy Mengguanakan
Mikrokontroler. Pada artikel ini membahas tentang tentang kontrol kecepatan
motor dc berbasis logika fuzzy menggunakan mikrokontroler 8-
bit. Mikrokontroler yang digunakan adalah: 68HC11F1 sebagai sistem
Kontroler Logika Fuzzy mempunyai 2-input: error (e) dan delta-error (de)
yang merupakan penyimpangan kecepatan putaran motor yang telah
dikonversikan kedalam tegangan dc 0-5V analog atau untuk 8-bit (0-255).
Output kontrol digunakan untuk menggontrol plant motor DC penguat medan
terpisah (separately excited dc motor) yang dilengkapi konverter ac/dc yang
direpresentasikan secara “black box” dengan asumsi gain linier. Selanjutnya
diimplementasikan sebagai obyek yang dikontrol adalah plant tiruan kedalam
Komputer Personal melalui saluran Tx RS-232 dikirim sebagai aksi kontrol
(Vo) yang diumpan balikkan untuk dibandingkan dengan tegangan referensi
(Vr) melalui saluran Rx RS-232.Algoritma error(e) dan delta-error(de)
diproses oleh mikrokontroler 8-bit 68HC11F1 (0-255) berbasis logika fuzzy
yang didasarkan atas 7x7 rule base fungsi keanggotaan dengan teori Min-
Max Mamdani. Hasil uji eksperimen dalam artikel ini menunjukkan dengan
input referensi (setting point) 2V, waktu sampel (sampling time)4000ms(T1)
dan 300ms(T2), interval 100 ms dan gain=8.5 diperoleh sinyal output diskrit
pada settling time antara 0-34ms dengan amplitudo 1.99V daerah steady state
atau ={(2.00-1.99)*100%}/2 = 0.5% dari steady state.
d. Anton Dwi Mardani ( 2014 ). Pemodeln Dan Simulasi Kecepatan Motor DC
Berbasis Fuzzy Logic controller Dengan 5 Fungsi Keanggotaan ( Beban
Tetap ). Pada penelitian ini penulis mencoba mengendalikan kecepatan motor
dengan Fuzzy Logic Controller dengan dua fungsi keanggotaan 3 dan 5
fungsi keanggotaan. Tapi peneliti lebih menganjurkan menggunakan 5 fungsi
keanggotaan karena hasil yang di dapat lebih bagus karena membutuhkan
waktu yang relative sebentar untuk mendapatkan kecepatan putaran motor
DC yang stabil lebih cepat daripada menggunakan 3 fungsi keanggotaan.
Dalam penelitian ini penulis menguraikan bagaimana mengendalikan motor
dengan Fuzzy Logic Controller, yang mana dilakukan dengan pendekatan

7
pemodelan dan simulasi. Adapun Fuzzy Logic Contoller dalam penelitian ini
dibangun dari blok pada simulink Matlab dan menggunakan 2 tipe
membership function, yaitu tipe segitiga dan tipe trapezium. Dengan
menggunakan membership function yang berbeda hasil yang didapat juga
berbeda, dimana kecepatan untuk mencapai kestabilan lebih baik
menggunakan membership function tipe segitiga karena kecepatan menuju
stabil yang sempurna atau 1. Tapi untuk menghasilkan kecepatan putaran
yang stabil kita juga perlu mengatur aturanaturan fuzzy logic agar
menghasilkan putaran motor dc yang stabil.
e. Bara Agung Perdamaian (2003). Pemodelan dan Simulasi Kecepatan Motor
dc Berbasis Fuzzy Logic Controller Dengan 3 Fungsi Keanggotaan. Pada
penelitian ini disimulasikan aplikasi pengendali logika fuzzy untuk mengatur
kecepatan motor DC. Motor DC dimodelkan secara matematis menggunakan
Matlab. Pengendali logika fuzzy menggunakan tool box fuzzy inference system
di Matlab. Ada 3 jenis tipe fungsi keanggotaan yang digunakan dalam
penelitian ini, yaitu trapesium, segitiga, dan gaussian. Masing – masing
fungsi keanggotaan memiliki 3 parameter (negatif, zero, positif). Hasil
simulasi kecepatan motor DC menunjukkan bahwa untuk medapatkan output
kecepatan motor DC yang stabil diperlukan waktu diatas 5 second, untuk
waktu total simulasi selama 10 second, dan penyimpangan terhadap nilai rata
– rata kecepatan yang kecil yaitu dari 3,36% sampai 1,8%.
f. Dalam penelitiannya yang berjudul Prototipe sistem kendali temperatur
berbasis fuzzy logic pada sebuah inkubator, Annis Hannawati dan kawan
kawan menyajikan frame work teknik perancangan kendali temperatur
berbasis fuzzy logic yang diaplikasikan pada sebuah inkubator dengan
mengontrol kerja bola lampu dan kipas pendingin. Hasil penelitian
disimpulkan bahwa teknik kendali fuzzy logic relatif mudah untuk dirancang,
dengan menerapkan asas-asas atau logika umum fuzzy rule dapat dibentuk
dengan mudah, fuzzy logic cukup membantu dalam melakukan perancangan
dan implementasi kendali temperatur inkubator, mampu mengatasi gangguan
dari luar, proses kendali dapat diamati secara online dan terbuka luas untuk
pengembangan lebih lanjut terutama pada aplikasi kendali temperatur.
8
g. Muhammad Muhlas ( 2015 ). Merancang pengaturan putaran kipas pendingin
mesin mobil. Efisiensi kerja mesin diperoleh pada temperatur kerja sekitar
900 C, kipas pendingin elektrik baru bekerja setelah temperatur engine 950 C
dan kipas elektrik akan mati setelah temperatur dibawah 880 C. Pada
kendaraan umum, kipas bekerja dengan putaran konstan. Guna meningkatkan
efektifitas pendinginan diperlukan sistem yang berfungsi mengendalikan
temperatur kerja mesin dengan mengatur kecepatan putaran kipas pendingin
radiator sesuai kebutuhan, maksudnya bila temperatur engine rendah maka
putaran kipas pelan, sebaliknya bila temperatur tinggi maka putaran kipas
semakin cepat. Dengan mengukur sinyal dari sensor temperatur mesin dan
sensor temperatur radiator telah berhasil dirancang sistem pengatur kecepatan
putaran kipas pendingin menggunakan mikrokontroller dengan logika fuzzy.
Hasil perancangan menunjukkan sistem akan bekerja secara bervariasi pada
kondisi-kondisi yang berbeda. Pada putaran stasioner setelah mesin panas
kipas bekerja dan mempertahankan temperatur pada 900± 50 C. Pada putaran
2000 Rpm hasil penelitian menunjukkan temperature kerja terendah 89 oC
dan tertinggi 94 oC. Pada putaran 3500 Rpm temperatur hampir stabil di
sekitar 90 oC.
2.2 Landasan Teori
Pada bab ini akan mengkaji mengenai teori-teori penunjang yang digunakan
dalam Pegembangan alat simulasi berbasis fuzzy logic. Sistem pendinginan dalam
mesin adalah suatu sistem yang berfungsi untuk menjaga supaya temperatur mesin
dalam kondisi yang ideal. Mesin pembakaran dalam (maupun luar) melakukan
proses pembakaran untuk menghasilkan energi dan dengan mekanisme mesin
diubah menjadi tenaga gerak. Mesin bukan instrumen dengan efisiensi sempurna,
panas hasil pembakaran tidak semuanya terkonversi menjadi energi, sebagian
terbuang melalui saluran pembuangan dan sebagian terserap oleh material
disekitar ruang bakar.
Proses pembakaran yang berlangsung terus menerus dalam mesin
mengakibatkan mesin dalam kondisi temperatur yang sangat tinggi. Temperatur
sangat tinggi akan mengakibatkan desain mesin menjadi tidak ekonomis, sebagian
besar mesin juga berada di lingkungan yang tidak terlalu jauh dengan manusia

9
sehingga menurunkan faktor keamanan. Temperatur yang sangat rendah juga
tidak terlalu menguntungkan dalam proses kerja mesin. Sistem pendinginan
digunakan agar temperatur mesin terjaga pada batas temperatur kerja yang
ideal.Prinsip pendinginan adalah melepaskan panas mesin ke udara, dan
dibedakan menjadi dua tipe, yaitu:
A. tipe langsung dilepaskan ke udara disebut pendinginan udara (air
cooling)
B. tipe menggunakan fluida sebagai perantara disebut pendinginan air.
2.2.1 Tipe Pendinginan Media Udara
Sistem pendinginan udara menggunakan hembusan udara pada sirip-sirip
pendingin mesin yang dibuat pada bagian silinder dan kepala silinder, panas yang
timbul pada mesin tersebut akan dirambatkan pada bagian sirip dan kemudian
dibuang bersama udara. Dalam sistem ini, panas mesin langsung dilepaskan ke
udara.Mesin dengan sistem pendinginan udara mempunyai desain pada silinder
mesin terdapat sirip pendingin.Sirip pendingin ini untuk memperluas bidang
singgung antara mesin dengan udara sehingga pelepasan panas bisa berlangsung
lebih cepat.
Gambar 2.1 Cooling System menggunakan media udara
(Sumber :https://id.wikipedia.org/wiki/Sistem_pendinginan,2018)
2.2.2 Tipe Pendinginan Media Air
Sistem ini menggunakan media air sebagai perantara untuk melepaskan
panas ke udara, dengan komponen utama dalam sistem ini adalah :
1. Radiator, berfungsi untuk melepaskan panas.
2. Saluran berupa pipa (tube) atau selang karet (hose).
3. Pump, berfungsi untuk mensirkulasikan air dalam sistem.

10
4. Thermostat, berfungsi untuk menutup atau membuka jalur sirkulasi.
5. Fan, berfungsi untuk membantu pelepasan panas pada radiator.
Gambar 2.2 Cooling System menggunakan media air
(Sumber :http://www.otopos.net/2014/12/sistem-pendingin-
coolingsystem.html,2018)
Sistem pendinginan sendiri menurut cara kerjanya dibedakan menjadi dua macam
yaitu:
Sistem pendingin penggerak mekanik
Sistem pendingin penggerak hidrolik
2.2.3 Sistem Pendingin Penggerak Mekanik
Sistem pendinginan mekanik yaitu sistem pendinginan yang biasa dipakai
pada umumnya seperti kendaraan-kendaraan ringan, yang kipas pendinginnya
diputar secara langsung oleh fly wheel yang duhubungkan dengan pulley dan v-
belt. Sistem pendinginan ini terdiri dari beberapa komponen antara lain;
A. Radiator
B. Water Pump
C. Fan
D. Thermostat
E. Water Jacket
F. Radiator Cap
G. Reservoir Tank
H. Hose

11
2.2.3.1 Cara kerja sistem pendingin mekanik
Gambar 2.3 Cara kerja cooling system menggunakan media air
(Sumber:http://www.vedcmalang.com/ sistem-pendinginan-air-pada-mesin-mobil,
2018)
Berdasarkan gambar 2.3, cara kerja dari sistem pendinginan mekanik
adalahmulai dari kondisi temperatur mesin masih dingin atau bertemperatur udara
luar atmosfir, kemudian diharapkan mesin cepat panas atau cepat mencapai
temperatur kerja yang diinginkan (80°C -1000C) dan selanjutnya
mempertahankan temperatur kerja mesin tersebut, jangan sampai temperatur
mesin dibawah batas tersebut dan juga jangan sampai temperatur mesin diatas
batas atas tersebut diatas (overheating).
a. Temperatur Mesin Dingin Sampai Temperatur Kerja
Pada saat mesin masih dingin (bertemperatur udara atmosfir) dan
kemudian mesin dihidupkan, maka di dalam silinder terjadi proses
pembakaran yang berulang-ulang, sehingga komponen mesin dan air
pendingin temperaturnya semakin meningkat. Bersamaan dengan itu,
water pump (6) berputar, maka terjadi sirkulasi air hanya di dalam rongga
blok motor dan kepala silinder (1). Air tidak dapat bersirkulasi melewati
radiator (4), karena termostat (5) masih tertutup. Olehkarena sirkulasi air
hanya di dalam mesin dan air tidak didinginkan radiator, maka komponen
mesin dan air menjadi cepat panas atau disebut dengan mesin telah panas,
mencapai temperatur kerja yang diinginkan (80°C - 1000 C).

12
b. Temperatur Kerja Mesin Stabil
Setelah mesin panas atau mencapai temperatur kerja, temperatur
mesin tidak boleh naik lagi melebihi batas atas temperatur kerja, karena
akan mengakibatkan panas mesin berlebihan (overheating), harus
diupayakan temperatur kerja mesin stabil pada rentang temperatur yang
diinginkan (80°C 1000 C). Supaya temperatur mesin tidak naik lagi, maka
air pendingin yang panas harus disirkulasikan dan didinginkan radiator.
Oleh karena itu saat mesin panas thermostat harus membuka, sehingga
sirkulasi air tidak hanya di dalam mesin, tetapi melewati thermostat (5),
hosebagian atas (2), radiator (4), hose bagian bawah (3), water pump (6)
dan ke dalam mesin (1), thermostat dan seterusnya.
Akibatnya panas air pada radiator akan berpindah ke sirip-sirip
radiator dan terus berpindah ke udara yang melewati radiator. Dengan
sirkulasi air yang terus menerus melewati radiator dan didinginkan oleh
udara yang selalu lewat dari depan kendaraan ke arah mesin, maka
temperatur air yang cenderung semakin panas akan didinginkan, sehingga
temperaturmesin akan terjaga tidak melebihi batas panas temperature
kerja.Fanyang berputar akan menjamin kecukupan aliran udara yang
melewati radiator.
2.2.4 Sistem Pendingin Penggerak Hidrolik
Pada unit PC 1250-8R terdapat sistem hidrolik yang nantinya akan
menggerakkan fan, dan sebelum menggerakkan fan tersebut terdapat komponen-
komponen hidrolik lainnya yang nantinya meneruskan tekanan menuju fan motor
untuk memutar fan, dan komponen-komponen tersebut diantaranya adalah sebagai
berikut:
2.2.4.1 Hydraulic Fan motor
Hydraulic Fan motor berfungsi untuk merubah tekanan oli hidrolik dari
hydraulic pump menjadi putaran yang nantinya akan diteruskan menuju fanuntuk
mendinginkan coolant yang berada didalam radiator.
13
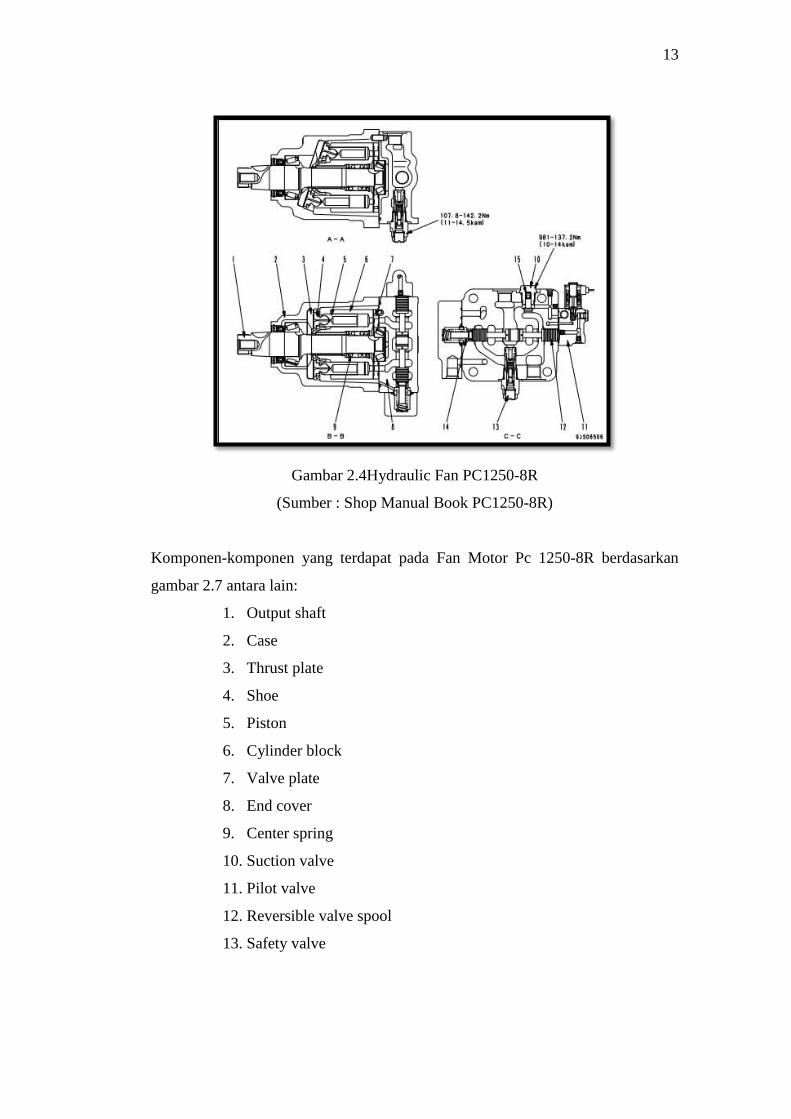
Gambar 2.4Hydraulic Fan PC1250-8R
(Sumber : Shop Manual Book PC1250-8R)
Komponen-komponen yang terdapat pada Fan Motor Pc 1250-8R berdasarkan
gambar 2.7 antara lain:
1. Output shaft
2. Case
3. Thrust plate
4. Shoe
5. Piston
6. Cylinder block
7. Valve plate
8. End cover
9. Center spring
10. Suction valve
11. Pilot valve
12. Reversible valve spool
13. Safety valve

14
A. Prinsip dasar cara kerja dariHydraulic Fan Motor
Gambar 2.5 Pinsip Kerja Hydraulic Fan Motor
(Sumber :Shop Manual Book PC12508R )
Gambar 2.6 Pergerakan Piston pada Hydraulic Fan Motor
(Sumber :Shop Manual Book PC1250-8R )
Prinsip kerja dari Hydraulic Fan Motorpada unit PC1250-8R adalah ssebagai
berikut:
1. Oli dikirim dari aliran yang dihasilkan oleh pompa hidrolik melalui valve
plate (7) ke dalam cylinder block (5) oli ini hanya dapat mengalir pada
satu sisi (Y-Y) garis yang menghubungkan titik mati atas dan titik mati
bawah langkah piston (4) Oli dikirim ke salah satu sisi cylinder block

15
(5) dan menekan piston (4) [4 sampai 5 buah piston] dan menghasilkan
gaya.
2. Gaya yang dihasilkan oleh piston tersebut diaplikasikan kepada thurst
plate (2), sejak thurst plate (2) dipasang dengan sudut (a °) ke output shaft
(1), gaya adalah dibagi menjadi komponen (F2)dan (F3).
3. Komponen radial (F3) mengahasilkan torsi terhadap garis (Y-Y) yang
menghubungkan titik mati atas dan titik mati bawah.
4. Hasil dari torsi ini menghasilkan putaran terhadap cylinder block (5)
mealui piston (4).
5. Karena cylinder block (5) ini disejajarkan dengan output shaft (1), maka
output shaft (1) juga ikut berputar dan mengirimkan torsi kepada fan.
B. Cara kerja Hydraulic Fan Motorberdasarkan Hydraulic Fan Pump
1. Saat Hydraulic Fan Pump bekerja
Gambar 2.7 Hydraulic Fan Motor ketika Hydraulic Fan Pump bekerja
(Sumber :Shop Manual Book PC 1250-8R)
Jika oli bertekanan dari hydraulic fan pump diberikan ke port (P) dan
tekanan pada sisi (MA) naik dan torsi awal dihasilkan di hydraulic fan

16
motor, maka hydraulic fan motor akan mulai bergerak. Oli bertekananpada
sisi outlet (MB) akankembali melalui port (T) ke tangki.
3. Saat Hydraulic Fan Pump berhenti
Gambar 2.7 Hydraulic Fan Motor ketika Hydraulic Fan Pump berhenti
(Sumber :Shop Manual Book PC 1250-8R)
Jika mesin dihentikan dan inputdari hydraulic fan pump menurun
hingga 0 rpm, tekanan oli dari hydraulic fan pumptidak dipasok keport (P)
lagi. Karena oli yang bertekanan tidakdipasok ke sisi (MA) pada hydraulic
fan motor, sehingga kecepatan motor menurun secara bertahap sampai
berhenti. Dan jika shafthydraulic fan motor berputar oleh kekuataninersia
saat aliran oli di port (P) berkurang,oli di port (T) di sisi outlet dikirimoleh
suction valve (1) ke sisi (MA) untuk mencegah kavitasi.
17
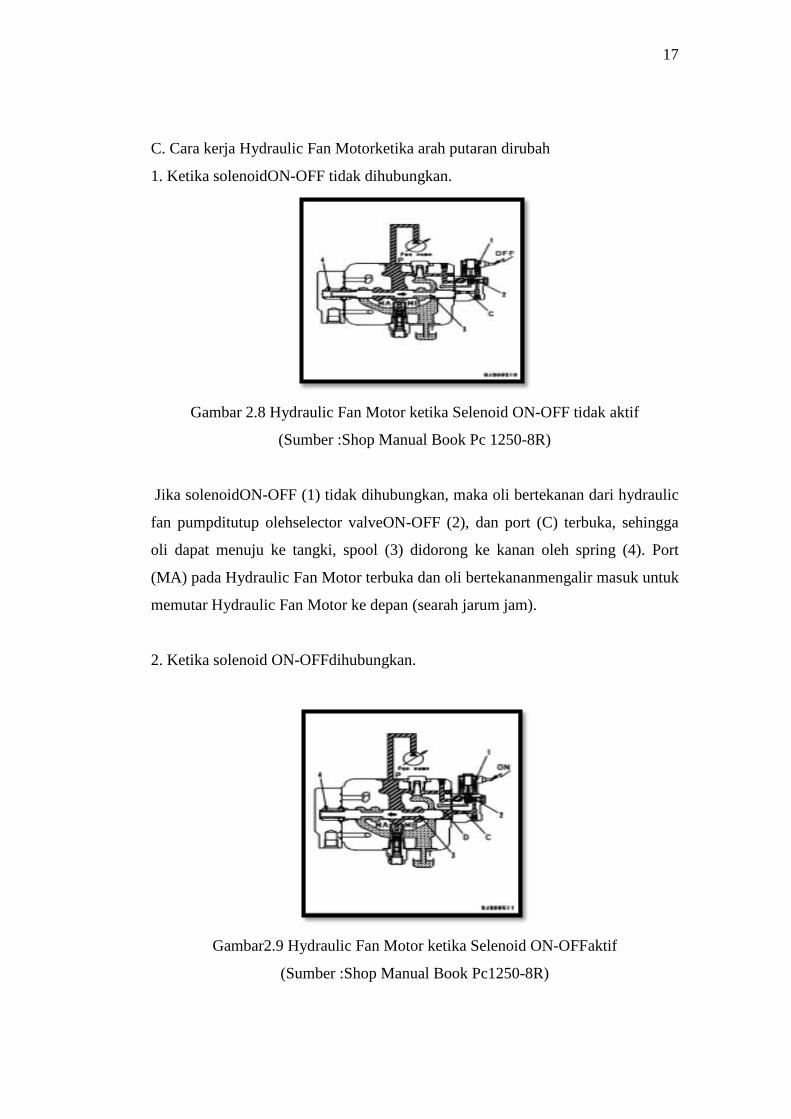
C. Cara kerja Hydraulic Fan Motorketika arah putaran dirubah
1. Ketika solenoidON-OFF tidak dihubungkan.
Gambar 2.8 Hydraulic Fan Motor ketika Selenoid ON-OFF tidak aktif
(Sumber :Shop Manual Book Pc 1250-8R)
Jika solenoidON-OFF (1) tidak dihubungkan, maka oli bertekanan dari hydraulic
fan pumpditutup olehselector valveON-OFF (2), dan port (C) terbuka, sehingga
oli dapat menuju ke tangki, spool (3) didorong ke kanan oleh spring (4). Port
(MA) pada Hydraulic Fan Motor terbuka dan oli bertekananmengalir masuk untuk
memutar Hydraulic Fan Motor ke depan (searah jarum jam).
2. Ketika solenoid ON-OFFdihubungkan.
Gambar2.9 Hydraulic Fan Motor ketika Selenoid ON-OFFaktif
(Sumber :Shop Manual Book Pc1250-8R)

18
Jika solenoidON-OFF (1) dihubungkan, selector valve ON-OFF (2) merubah
aliran oli yang bertekanan dari hydraulic fan pump melalui port (C)ke dalam spool
chamber(D). Oli yang bertekanan didalam spool chamber (D) mendorongvalve
spool (3) ke kiri terhadap spring (4).Port padahydraulic fan motor (MB) terbuka
dan oli yang bertekananmengalir masuk untuk memutar hydraulic fan motor
secara terbalik (berlawanan arah jarum jam).
D. Safety valve
Gambar2.10 Safety Valve
(Sumber :Shop Manual Book Pc 1250-8R)
Safety Valve(1) adalah suatu valve(2) yang berfungsi untuk melindungi fan
system circuit. Saat mesin dihidupkan, tekanan masuk menuju port(P) pada
hydraulic fan motormeningkat di beberapa kasus. Safety Valve(1) ini bekerja jika
tekanan pada port (P) meningkat,valve (2) pada safety valve(1) akan terbuka
untuk mengurangi tekanan dengan cara mengalirkan oli menuju tangki port (T),
dengan cara ini, peningkatan tekanan abnormal di port (P) dapat dicegah.
2.2.4 Sensor Temperatur
Sensor suhu atau temperature sensor adalah suatu komponen yang dapat
mengubah besaran panas menjadi besaran listrik sehingga dapat mendeteksi gejala
perubahan suhu pada objek tertentu. Sensor suhu melakukan pengukuran terhadap
jumlah energi panas atau dingin yang dihasilkan oleh suatu objek hingga
memungkinkan kita untuk mengetahui atau mendeteksi gejala perubahan –
perubahan suhu tersebut dalam bentuk output analog maupun digital. (ww.teknik
elektronika.com)

19
2.2.5 Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi
listrik menjadi energi mekanik. Motor DC atau sering disebut motor arus searah
lebih sering digunakan untuk keperluan yang membutuhkan pengaturan kecepatan
dibandingkan dengan mesin AC. Alasan utama penggunaan mesin DC terutama
pada industri-industri modern adalah karena kecepatan kerja motor-motor
dcmudah diatur dalam suatu rentang kecepatan yang luas, disamping banyaknya
metode-metode pengaturan kecepatan yang dapat digunakan.
Motor DC sangat dikenal karena pemakaiannya yang beraneka ragam.
Dengan melakukan berbagai penggabungan lilitan medan yang diteral secara
shunt, seri maupun secara terpisah, dapat dirancang suatu motor yang dapat
menampilkan karakteristik volt-amper atau kecepatan-momen yang bermacam-
macam untuk penggunSaan dinamik maupun keadaan tetap (ajek). Karena mudah
diatur, sistem motor dc sering digunakan pada pemakaian yang memerlukan
rentan kecepatanyang lebar atau pengaturan yang teliti pada keluaran yang
diinginkan.
Cara kerja Motor DC memerlukan suplai tegangan searah pada kumparan
medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor DC
disebut stator (bagian yang tidak berputar), dan kumparan jangkar disebut rotor
(bagian yang berputar). Jika terjadi putaran pada kumparan jangkar didalam
medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada
setiap setengah putaran. Prinsip kerja dari arus searah adalah membalik fasa
tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan
komutator, maka dengan memberikan beda tegangan pada kedua terminal
tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan
tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari
tegangan yang diberikan pada dua terminal menentukan arah putaran motor
sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan
motor.

20
Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa
berputar bebas di antara kutub-kutub magnet permanen. Motor DC merupakan
jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya.
Gambar 2.11 Motor DC Sederhana
Sumber : (prinsip-kerja-motor, 2015)
Satu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh
komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu
lilitan pada gambar di atas disebut angker dinamo atau biasa disebut rotor. Angker
dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka
tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan
reaksi lawan. Dengan memberi arus pada kumparan jangkar yangdilindungi oleh
medan maka menimbulkan perputaran pada motor. Sebuah motor menghasilkan
keluaran berupa tenaga putar atau torque yang dipengaruhi oleh kecepatan motor
tersebut, atau yang disebut juga denganbeban motor. Adapun beberapa kategori
beban diantaranya:
1. Beban torque konstan adalah beban dimana permintaan keluaranenerginya
bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi.
Contoh beban dengan torque konstan adalah corveyors, rotarykilns, dan
pompa displacement konstan.
2. Beban dengan variabel torqueadalah beban dengan torque yang bervariasi
dengan kecepatan operasi. Contoh beban dengan variabel torque adalah
21
pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
Peralatan Energi Listrik : Motor Listrik.
3. Beban dengan energi konstan adalah beban dengan permintaan torque yang
berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban
dengan daya konstan adalah peralatan-peralatan mesin. Berikut bagian-bagian
utama pada motor dc :
Kutub medan
Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan
menyebabkan perputaran pada motor dc. Motor DC memiliki kutub medan yang
stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub
medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub
selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub
dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat
satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya
dari luar sebagai penyedia struktur medan.
Dinamo
Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet.
Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk
menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam
medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan
magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah
kutub-kutub utara dan selatan dinamo.
Komutator.
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah
untuk transmisi arus antara dinamo dan sumber daya.
a. Prinsip dasar kerja motor DC
Jika arus lewat pada suatu konduktor, akan timbul medan magnet di sekitar
konduktor. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor.

22
Gambar 2.12 Medan magnet yang membawa arus mengelilingi konduktor
Sumber : (prinsip-kerja-motor, 2012)
Aturan genggaman tangan kanan bisa digunakan untuk menentukan arah
garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan
dengan jempol mengarah pada arah aliran arus, maka jari-jari akan menunjukkan
arah garis fluks. Gambar 2.5 nomor 2 menunjukkan medan magnet yang terbentuk
di sekitar konduktor berubah arah karena berbentuk U.
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus
mengalir pada konduktor tersebut. Jika konduktor berbentuk U (rotor) diletakkan
di antara kutub utara dan selatan, maka kuat medan magnet konduktor akan
berinteraksi dengan medan magnet kutub.
Gambar 2.13 Reaksi garis fluks
Sumber : (prinsip-kerja-motor, 2012)
Lingkaran bertanda A dan B merupakan ujung konduktor yang
dilengkungkan (looped conductor). Arus mengalir masuk melalui ujung A dan
keluar melalui ujung B. Medan konduktor A yang searah jarum jam akan

23
menambah medan pada kutub dan menimbulkan medan yang kuat di bawah
konduktor. Konduktor akan berusaha bergerak ke atas untuk keluar dari medan
magnet .
Medan konduktor B yang berlawanan arah jarum jam akan menambah medan
pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor
akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut.
Gaya-gaya tersebut akan membuat rotor berputar searah jarum jam.
Pada motor DC, daerah kumparan medan yang dialiri arus listrik akan
menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah
tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun
sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet
disini selain berfungsi sebagai tempat untuk menyimpan energi, medan magnet
juga berfungsi sebagai tempat berlangsungnya proses perubahan energi, daerah
tersebut dapat dilihat pada gambar di bawah ini :
Gambar 2.14 Prinsip kerja motor DC
Sumber : (prinsip-kerja-motor, 2012)
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna,
maka tegangan sumber harus lebih besar daripada tegangan gerak yang
disebabkan reaksi. Dengan memberi arus pada kumparan jangkar yang dilindungi
oleh medan maka menimbulkan perputaran pada motor.
Mekanisme kerja untuk motor DC :

24
Arus listrik dalam medan magnet akan memberikan gaya
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran /
loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan
mendapatkan gaya pada ara yang berlawanan.
Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan.
Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan
tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh
susunan elektromagnetik yang disebut kumparan medan.
b. Karakteristik Motor DC
Karakteristik yang dimiliki suatu motor DC dapat digambarkan melalui kurva
daya dan kurva torsi/kecepatannya, dari kurva tersebut dapat dianalisa batasan-
batasankerja dari motor serta daerah kerja optimum dari motor tersebut.
Gambar 2.15 Grafik kurva torsi dan kecepatan
Sumber : (Karakteristik-Motor-DC)
Stall torque, menunjukkan titik pada grafik dimana torsi maksimum tetapi
tidak ada putaran pada motor.
No load speed, menunjukkan titik pada grafik dimana terjadi kecepatan
putaran maksimum tetapi tidak ada beban pada motor Analisa terhadap grafik
dilakukan dengan menghubungkan kedua titik tersebut dengan sebuah garis,
dimana persamaan garis tersebut dapat di tulis di dalam fungsi torsi atau
kecepatan sudut.

25
Dengan memasukan persamaan torsi dan kecepatan kedalam persamaan daya
di peroleh[ 4 ].
Dari persamaan daya terlihat bahwa daya merupakan perkalian antara torsi
dan kecepatan sudut. Dimana di dalam grafik ditunjukkan oleh luas daerah persegi
di bawah kurva torsi dan kecepatan [ 4 ].
Gambar 2.16 Grafik torsi dan kecpatan dengan luas daerah persegi
Sumber : (Karakteristik-Motor-DC)
2.2.6 Kipas
Fan atau kipas adalah alat mekanika yang berfungsi untuk menghasilkan flow
atau aliran pada suatu fluida, biasanya berupa gas. Pada dunia industry, fan
digunakan untuk menghasilkan flow dari gas atau udara dalam jumlah besar yang
digunakan sesuai dengan kebutuhan dari industry tersebut.
Fan terdiri dari beberapa bagian yaitu, case, sudu (vane atau blade), dan
menggerakannya, vane atau blade berputar untuk menghasilkan aliran udara yang
di inginkan. Berbeda dengan fungsi dari kompresor yang menghasilkan udara

26
bertekanan dengan flow rendah, van menghasilkan aliran udara dengan flow tinggi
dan tekanan yang rendah.
Di dunia industri, fan digunakan antara lain pada proses pembakaran, system
HVAC, transport, pendingin, pengering udara, dan lain sebagainya
Gambar 2.17 Kipas atau fan
Sumber : ( Basic Mechanic)
a. Komponen – Komponen Utama Tool
Komponen – Komponen Utama Tool
Tool monitoring alat simulasi terdiri dari beberapa komponen yang
dirangkai sedemikian rupa sehingga sistem sensor dapat bekerja secara
optimal ketika dibutuhkan. Komponen – komponen tersebut adalah :
Driver Motor DC L298N
L298 merupakan sebuah IC tipe H-bridge yang mampu mengendalikan
beban-beban induktif seperti relay, solenoid, motor DC dan motor stepper.
Pada IC L298 terdiri dari transistor-transistor logik (TTL) dengan gerbang
nand yang berfungsi untuk memudahkan dalam menentukan arah putaran
suatu motor dc maupun motor stepper.
Untuk dipasaran sudah terdapat modul driver motor menggunakan ic l298 ini,
sehingga lebih praktis dalam penggunaannya karena pin I/O nya sudah
terpackage dengan rapi dan mudah digunakan.

27
Kelebihan akan modul driver motor L298N ini yaitu dalam hal kepresisian
dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.
Arduino
Arduino adalah sebuah pengendali mikro board tunggal yang memiliki
sifat terbuka (open source) yang diturunkan dari platform berbasis Wiring.
Pengendali ini dirancang untuk mempermudah penggunaan dalam
berbagai bidang elektronik.
Kipas atau Blower
Alat mekanika yang berfungsi untuk menghasilkan flow atau aliran pada
suatu fluida, biasanya berupa gas. Pada dunia industri, fan digunakan
untuk menghasilkan flow dari gas atau udara dalam jumlah besar yang
digunakan sesuai dengan kebutuhan dari industry tersebut.
LCD ( Liquid Cristal Display )
Display elektronik adalah salah satu komponen elektronika yang berfungsi
sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD
(Liquid Cristal Display) adalah salah satu jenis display elektronik yang
dibuat dengan teknologi CMOS logic yang bekerja dengan tidak
menghasilkan cahaya tetapi memantulkan cahaya yang ada di
sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit.
LCD ( Liquid Cristal Display ) berfungsi sebagai penampil data baik
dalam bentuk karakter, huruf, angka ataupun grafik.
Sensor temperatur DS18b20
Sensor suhu atau temperature sensor adalah suatu komponen yang dapat
mengubah besaran panas menjadi besaran listrik sehingga dapat
mendeteksi gejala perubahan suhu pada objek tertentu.
Sensor suhu DHT22
DHT22 atau juga dikenal sebagai AM2302 adalah sensor yang dapat
mengukur suhu dan kelembaban udara di sekitarnya.Sensor ini lebih akurat
dan presisi dalam hal pengukuran di banding DHT11,kekurangan DHT22
,harga lebih mahal di banding DHT11.

28
Radiator
Radiator digunakan untuk mendinginkan mesin pembakaran internal,
terutama di mobil tetapi juga di pesawat bermesin piston, lokomotif kereta
api, sepeda motor, pembangkit pembangkit stasioner dan tempat lain di
mana mesin tersebut digunakan
3.3 Fuzzy Logic
Logika fuzzy diperkenalkan oleh Prof. Lotfi Zadeh pada tahun1965, yang
menyatakan bahwa dalam logika fuzzy memiliki derajat keanggotaan dalam
rentang “0” hingga “1”,berbeda dengan logika klasik/boolean yang hanya
menerjemahkan suatu besaran yang diekspresikan menggunakan bahasa
(linguistik), misalkan besaran kecepatan laju kenderaan yang diekspresikan
dengan slow(pelan), faster(agak cepat), fast (cepat), dan very fast(sangat cepat).
3.3.1 Himpunan Fuzzy
Himpunan fuzzy adalah pengelompokkan sesuatu berdasarkan variabel bahasa
(linguistik variable), yang dinyatakan dengan fungsi keanggotaan, dalam semesta
U. Keanggotaan suatu nilai pada himpunan dinyatakan dengan derajat
keanggotaan yang nilainya antara 0.0 sampai 1.0. Nilai keanggotaannya
menunjukkan bahwa suatu item tidak hanya bernilai benar atau salah. Nilai 0
menunjukkan salah, nilai 1 menunjukkan benar, dan masih ada nilai-nilai yang
terletak antara benar dan salah.
3.3.2 Fungsi keanggotaan
Fungsi keanggotaan merupakan suatu kurva yang menunjukkan pemetaan
titik-titik data masukan ke dalam nilai keanggotaannya. Fungsi keanggotaan
himpunan fuzzy tidak diekspresikan dengan “0” atau “1” seperti halnya
dalamlogika klasik, tetapi berupa derajat keangotaan yang nilainya antara “0” dan
“1” .
Terdapat beberapa kurva yang digunakan untuk mendefinisikan fungsi
keanggotaan , yaitu:
a. Fungsi keanggotaan segitiga ( Triangular membership function )Fungsi
keanggotaan segitiga ditentukan oleh 3 parameter yaitu {a, b, c} dengan
mengikuti aturan berikut:

29
Atau dengan menggunakan min dan max, dapat didefinisikan dengan:
Parameter {a, b, c} dengan a < b < c menentukan koordinat x dari 3 sudut fungsi
keanggotaan segitiga. Fungsi keanggotaan segitiga dapat digambarkan seperti
pada gambar 2.11.
Gambar 2.18 Fungsi keanggotaan segitiga
Sumber : (fuzzy logic)
b. Fungsi keanggotaan trapesium (Trapezoidal membership function) Fungsi
keanggotaan trapesium ditentukan 4 parameter {a, b, c, d} yang mengikuti
aturan :

30
Dan sebagai alternatif dapat digunakan min dan max dalam persamaan :
Dalam persamaan diatas parameter {a, b, c, d} dengan a < b < c < d
menentukan koordinat x dari 3 sudut fungsi keanggotaan trapesium. Fungsi
keanggotaan trapesium dapat digambarkan seperti pada gambar 2.12.
Gambar 2.19 Fungsi keanggotaan trapezium
Sumber : (fuzzy logic)
c. Fungsi keanggotaan gaussian (Gaussian membership function) Fungsi
keanggotaan Gaussian ditentukan dengan 2 parameter {c, σ} dengan
mengikuti persamaan berikut.
Fungsi keanggotaan gaussian ditentukan oleh c dan σ, dimana c
merepresentasikan titik tengah (center) dan σ merepresentasikan lebar dari fungsi
keanggotaan. Fungsi keanggotaan Gaussian dapat diwujudkan seperti pada
gambar 2.13.

31
Gambar 2.20 Fungsi keanggotaan Gaussian
Sumber : (fuzzy logic)
d. Fungsi keanggotaan lonceng (Generalized Bell membership function) Fungsi
keanggotaan lonceng ditentukan oleh 3 parameter {a, b, c} dengan mengikuti
persamaan berikut.
Mendefinisikan titik tengah, a mendefinisikan lebar kurva dan b digunakan untuk
mengendalikan nilai slope dan crossover. Parameter b biasanya bernilai positif.
Fungsi keanggotaan lonceng dapat diilustrasikan seperti gambar 2.14.
Gambar 2.21 Fungsi keanggotaan lonceng
Sumber : (fuzzy logic)
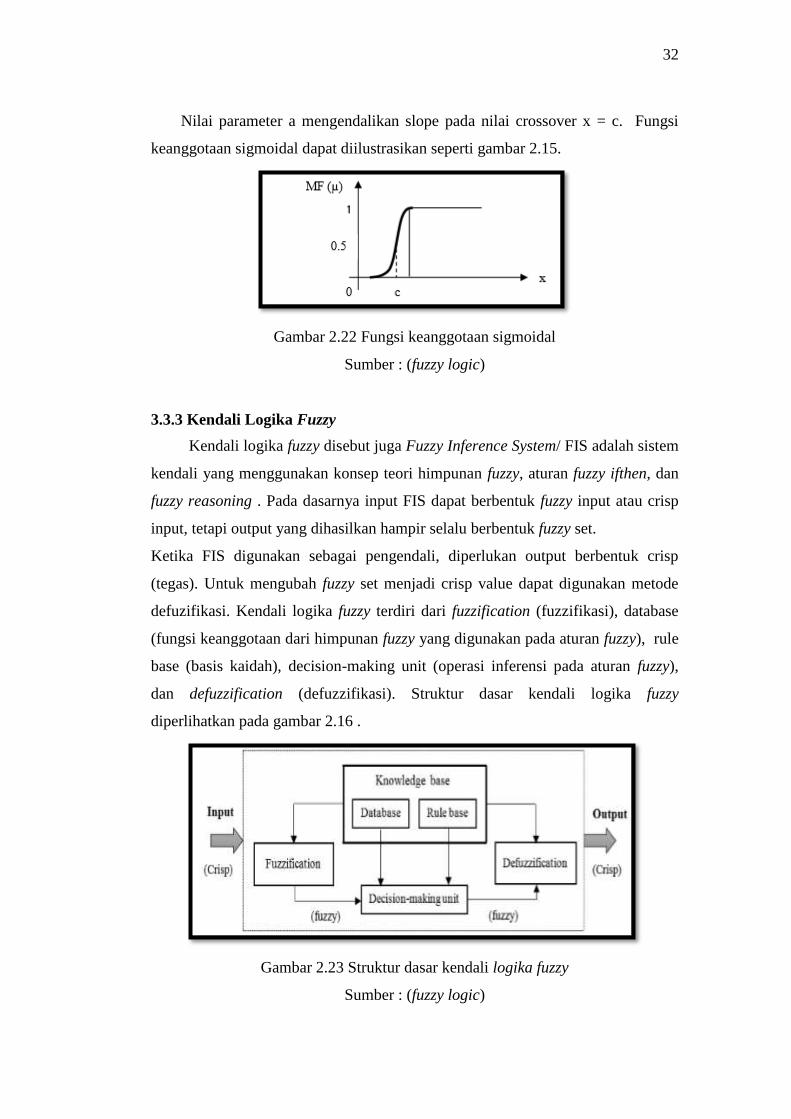
e. Fungsi keanggotaan sigmoidal (Sigmoidal membership function) Fungsi
keanggotaan sigmoidal didefinisikan dengan persamaan (2.7).
32
Nilai parameter a mengendalikan slope pada nilai crossover x = c. Fungsi
keanggotaan sigmoidal dapat diilustrasikan seperti gambar 2.15.
Gambar 2.22 Fungsi keanggotaan sigmoidal
Sumber : (fuzzy logic)
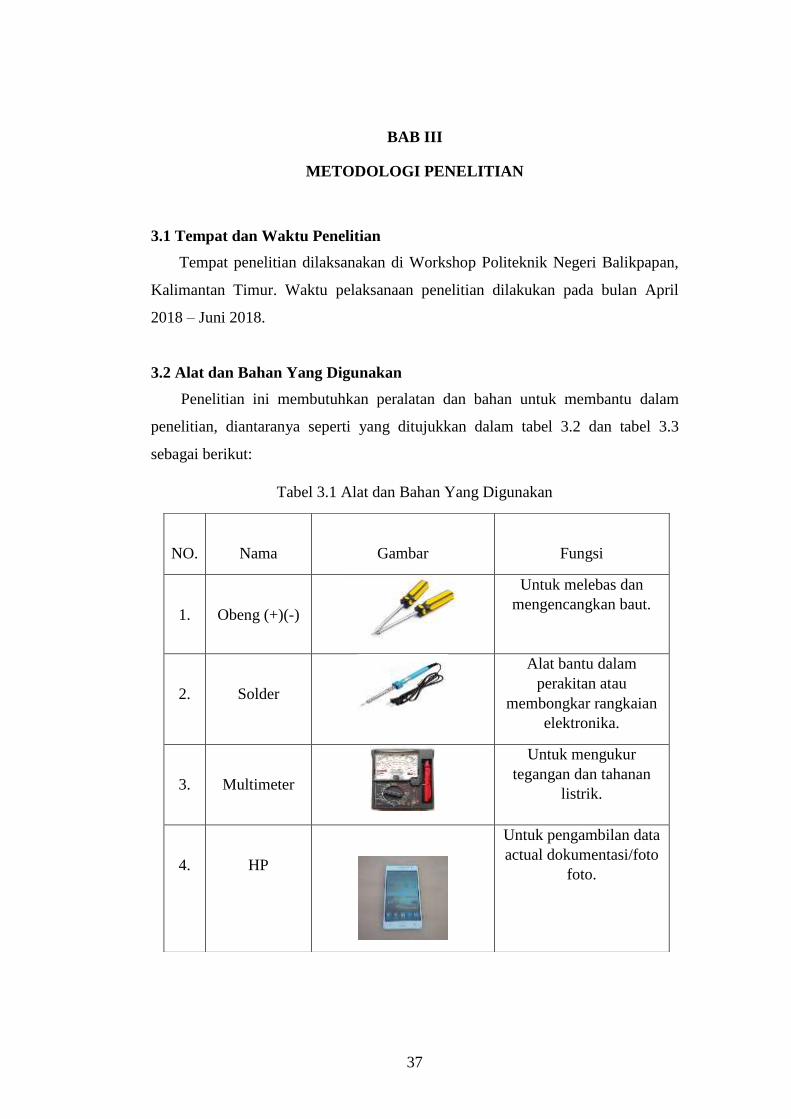
3.3.3 Kendali Logika Fuzzy
Kendali logika fuzzy disebut juga Fuzzy Inference System/ FIS adalah sistem
kendali yang menggunakan konsep teori himpunan fuzzy, aturan fuzzy ifthen, dan
fuzzy reasoning . Pada dasarnya input FIS dapat berbentuk fuzzy input atau crisp
input, tetapi output yang dihasilkan hampir selalu berbentuk fuzzy set.
Ketika FIS digunakan sebagai pengendali, diperlukan output berbentuk crisp
(tegas). Untuk mengubah fuzzy set menjadi crisp value dapat digunakan metode
defuzifikasi. Kendali logika fuzzy terdiri dari fuzzification (fuzzifikasi), database
(fungsi keanggotaan dari himpunan fuzzy yang digunakan pada aturan fuzzy), rule
base (basis kaidah), decision-making unit (operasi inferensi pada aturan fuzzy),
dan defuzzification (defuzzifikasi). Struktur dasar kendali logika fuzzy
diperlihatkan pada gambar 2.16 .
Gambar 2.23 Struktur dasar kendali logika fuzzy
Sumber : (fuzzy logic)

33
a. Fuzzyfikasi
Fuzzyfikasi merupakan proses memetakan nilai crisp (tegas) ke dalam
himpunan fuzzy dan menentukan derajat keanggotaannya di dalam himpunan
fuzzy. Prinsip proses fuzzifikasi diperlihatkan pada gambar 2.17.
Gambar 2.24 Prinsip proses fuzzyfkasi
Sumber : ( fuzzy logic)
Pada gambar 2.17 dapat diihat bahwa melalui proses fuzzifikasi, satu nilai
input tegas yang berada pada fungsi keanggotaan C dan D diubah menjadi nilai
fuzzy yang memiliki dua derajat keanggotaan (𝑥) dan 𝜇𝐷 (𝑥).
b. Basis Kaidah
Basis kaidah berisi pengetahuan empirik yang berkaitan dengan operasi dari
proses yang akan dikendalikan. Basis kaidah terdiri dari sejumlah aturan fuzzy If–
Then, yang dapat diterapkan dengan mudah oleh pernyataan kondisi pada logika
fuzzy. Struktur dasar basis kaidah logika tersamar adalah sebagai berikut :
Jika terdapat dua variabel masukan dan satu variabel keluaran, dan kedua
variabel masukan dikombinasikan dengan satu operator “And”, maka basis kaidah
dapat dituliskan dalam bentuk matrik, dimana nilai variabel masukan dinyatakan

34
dalam bentuk kolom dan baris, dan isi matrik merupakan nilai variabel keluaran
seperti terdapat pada gambar 2.19.
Gambar 2.25 Bentuk matrik basis kaidah dengan dua variable input
Sumber : (fuzzy logic)
24. Metode Mamdani
Metode Mamdani sering juga dikenal dengan nama metode Max-Min.
metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk
medapatkan output diperlukan beberapa tahapan, antara lain:
2.4.1 Pembentukan himpunan fuzzy
Pada Metode Mamdani, baik variabel input maupun variabel output dibagi
menjadi satu atau lebih himpunan fuzzy.
2.4.2 Aplikasi fungsi implikasi
Pada Metode Mamdani, fungsi implikasi yang digunakan adalah Min.
2.4.3 Komposisi aturan
Tidak seperti penalaran monoton, apabila sistem terdiri dari beberapa aturan,
maka inferensi diperoleh dari kumpulan dan kolerasi antar aturan. Ada 3 metode
yang digunakan dalam melakukan inferensi sistem fuzzy, yaitu max, additive dan
probabilistik OR (probor).
a. Metode Max (Maximum)
Metode Max (Maximum) mengambil solusi himpunan fuzzy diperoleh
dengan cara mengambil nilai maksimum aturan, kemudian menggunakannya
untuk memodifikasi daerah fuzzy, dan mengapilasikannya ke output dengan
menggunakan operator OR (union). Jika semua proposisi telah dievaluasi, maka
output akan berisi suatu himpunan fuzzy yang merefleksikan kontribusi dari tiap-
tiap proporsi. Secara umum dapat dituliskan:

35
b. Metode Additive (Sum)
Metode Additive (Sum) mengambil solusi himpunan fuzzy diperoleh dengan
cara melakukan bounded-sum terhadap semua output daerah fuzzy. Secara umum
dituliskan:
c. Metode Probabilistik OR (probor)
Metode Probabilitik OR (probor) mengambil solusi himpunan fuzzy diperoleh
dengan cara melakukan product terhadap semua output daerah fuzzy. Secara
umum dituliskan:
2.4.4 Penegasan (defuzzyfikasi)
Input dari proses defuzzyfikasi adalah suatu himpunan fuzzy yang diperoleh
dari komposisi aturan-aturan fuzzy, sedangkan output yang dihasilkan merupakan
suatu bilangan pada domain himpunan fuzzy tersebut. Sehingga jika diberikan
suatu himpunan fuzzy dalam range tertentu sebagai output seperti terlihat pada
Gambar berikut.

36
Gambar 2.26 Proses Defuzzifikasi
Sumber : ( fuzzy logic)
Ada beberapa metode defuzzifikasi pada komposisi aturan mamdani, antara lain:
a. Metode Centroid (Composite Moment). Pada metode centroid solusi crisp
diperoleh dengan cara mengambil titik pusat daerah fuzzy. Secara umum
dapat dituliskan:
b. Metode Bisektor. Pada metode bisektor solusi crisp diperoleh dengan cara
mengambil nilai pada domain yang memiliki nilai keanggotaan separo dari
jumlah total nilai keanggotaan pada daerah fuzzy.
c. Metode Mean of Maximum (MOM). Pada metode mean of maximum solusi
crisp diperoleh dengan cara mengambil nilai rata-rata domain yang memiliki
nilai keanggotaan maksimum.
d. Metode Largest of Maximum (LOM). Pada metode largest of maximum solusi
crisp diperoleh dengan cara mengambil nilai terbesar dari domain yang
memiliki nilai keanggotaan maksimum.
e. Metode Smallest of Maximum (SOM). Pada metode smallest of maximum
solusi crisp diperoleh dengan cara mengambil nilai terkecil dari domain yang
memiliki nilai keanggotaan maksimum.
37
BAB III
METODOLOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
Tempat penelitian dilaksanakan di Workshop Politeknik Negeri Balikpapan,
Kalimantan Timur. Waktu pelaksanaan penelitian dilakukan pada bulan April
2018 – Juni 2018.
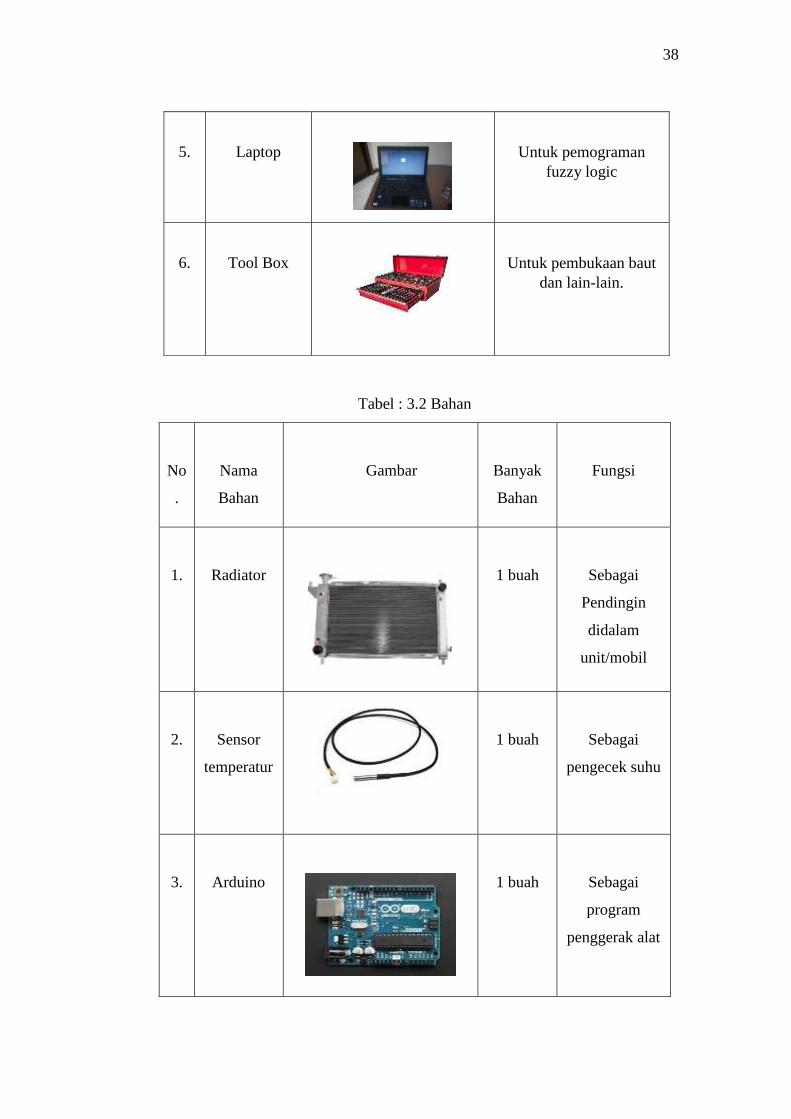
3.2 Alat dan Bahan Yang Digunakan
Penelitian ini membutuhkan peralatan dan bahan untuk membantu dalam
penelitian, diantaranya seperti yang ditujukkan dalam tabel 3.2 dan tabel 3.3
sebagai berikut:
Tabel 3.1 Alat dan Bahan Yang Digunakan
NO.
Nama
Gambar
Fungsi
1.
Obeng (+)(-)
Untuk melebas dan
mengencangkan baut.
2.
Solder
Alat bantu dalam
perakitan atau
membongkar rangkaian
elektronika.
3.
Multimeter
Untuk mengukur
tegangan dan tahanan
listrik.
4.
HP
Untuk pengambilan data
actual dokumentasi/foto
foto.
38
Tabel : 3.2 Bahan
No
.
Nama
Bahan
Gambar
Banyak
Bahan
Fungsi
1.
Radiator
1 buah
Sebagai
Pendingin
didalam
unit/mobil
2.
Sensor
temperatur
1 buah
Sebagai
pengecek suhu
3.
Arduino
1 buah
Sebagai
program
penggerak alat
5.
Laptop
Untuk pemograman
fuzzy logic
6.
Tool Box
Untuk pembukaan baut
dan lain-lain.

39
4.
resistor
1 buah
Untuk
mengatur
tegangan listrik
atau arus
5.
Sensor
suhu
1 buah
Sebagai alat
ukur suhu
6.
Kabel
Jumper
29 buah
Penghubung
antara arduino
dengan
pir,switch,rela
y.
7.
USB
1 buah
Untuk
menjalankan
perangkat luar
kedalam
CPU/kedalam
computer
8.
Driver
Motor DC
L298
1 buah
Pengendali
arah putaran
dan kecepatan

40
9.
10
kipas
LCD
1 buah
1 1
1
Untuk
mendinginkan
komponen
Untuk
menampilkan
tulisan yang
sudah di atur

41
Tidak
Ya
3.3 Diagram Alir Penelitian
Penelitian yang dilakukan oleh penulis memerlukan gambaran penelitian
seperti diagram alir untuk mempermudah pembaca maupun penulis untuk
memahami masalah yang diangkat oleh penulis.
Gambar : 3.1 Flow Chart
Sumber : (Penulis)
Mulai
Perancangan alat simulasi
Pembuatan dan Perakitan Alat
Pembahasan
Selesai
Hasil Sesuai?
?
Kesimpulan dan Saran
Perbaikan Rancangan
Pengujian Simulasi
Studi literatur
Hasil sesuai?
Tidak
Ya
Pengujian Sensor
42
Salah satu proses dalam suatu penelitian ialah melakukan tahapan
perencanaan. Tahapan awal dalam perencanaan adalah melakukan perancangan
alat yang dipergunakan serta aplikasi terkait. Setelah perancangan telah dibuat,
langkah selanjutnya melakukan pembuatan alat.
Setelah pembuatan alat selesai, hal yang perlu dilakukan adalah melakukan
percobaan pada alat – alat yang telah dibuat. Selanjutnya melakukan pengujian
secara keseluruhan dengan menggabungkan seluruh komponen – komponen yang
telah di uji. Hal ini berfungsi untuk mengetahui apakah alat – alat yang telah
dibuat tadi dapat bekerja sesuai yang diharapkan atau tidak. Jika hasil dari
pengujian pada alat menunjukan alat tidak dapat digunakan atau tidak bekerja
sesuai dengan yang diinginkan, maka akan dilakukan pembuatan alat kembali.
Kemudian dilakukan pengujian lagi pada alat tersebut. Langkah terakhir adalah
menganalisa hasil pengujian dengan menyimpulkan hasil kerja dan melihat
kelebihan dan kekurangan alat.
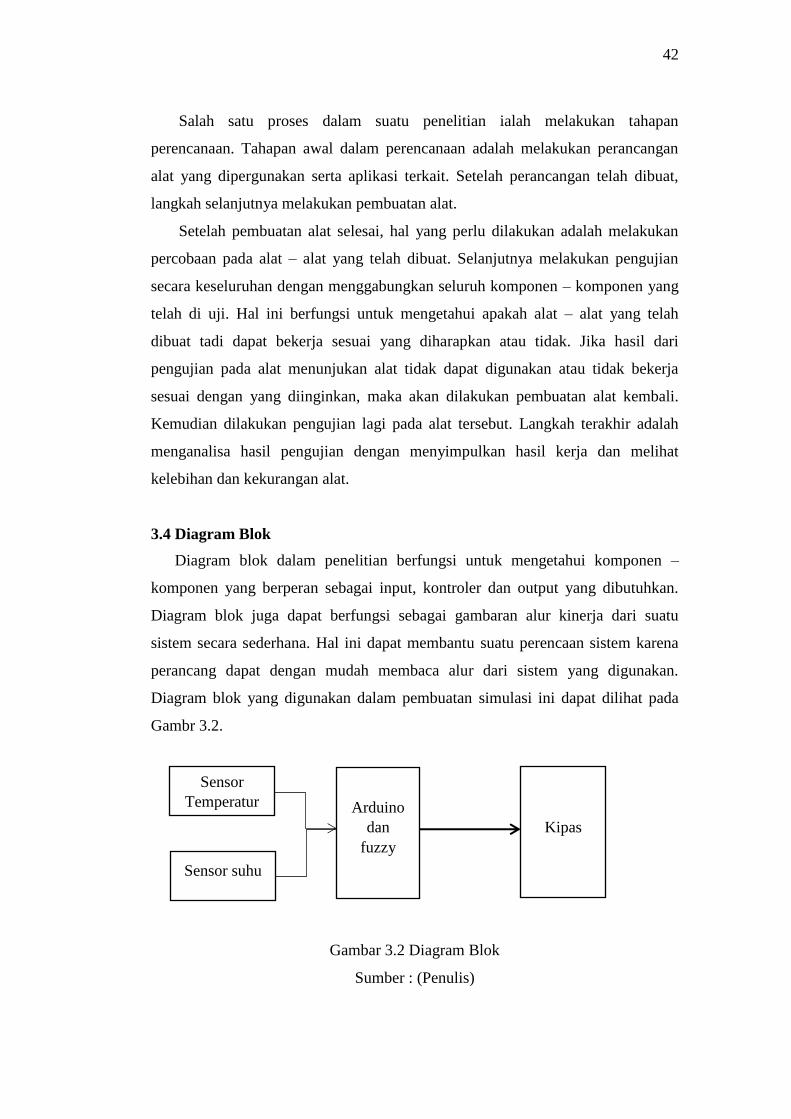
3.4 Diagram Blok
Diagram blok dalam penelitian berfungsi untuk mengetahui komponen –
komponen yang berperan sebagai input, kontroler dan output yang dibutuhkan.
Diagram blok juga dapat berfungsi sebagai gambaran alur kinerja dari suatu
sistem secara sederhana. Hal ini dapat membantu suatu perencaan sistem karena
perancang dapat dengan mudah membaca alur dari sistem yang digunakan.
Diagram blok yang digunakan dalam pembuatan simulasi ini dapat dilihat pada
Gambr 3.2.
Gambar 3.2 Diagram Blok
Sumber : (Penulis)
Arduino
dan
fuzzy
Kipas
Sensor
Temperatur
Sensor suhu

43
3.5 Diagram Tulang Ikan
Diagram tulang ikan dalam penelitian ini bertujuan untuk mengidentifikasi
kemungkinan penyebab kegagalan dalam perakitan alat. Tindakan dan langkah
improvement akan lebih mudah dilakukan jika masalah dan akar penyebab
masalah sudah ditemukan. Manfaat fishbone diagram ini dapat menolong kita
untuk menemukan akar penyebab masalah secara user friendly, tools yang user
friendly.
3.6 Jadwal Penelitian
Adapun penulis membuat time frame penelitian sebagai target dalam
pembuatan alat ini yang ditampilkan pada tabel 3.4 sebagai berikut:
Tabel 3.4 Jadwal Penelitian
1 Pembuatan proposal
2 Uji proposal
3 Pembuatan alat simulai
4 Pengujian Alat Simulasi dan Quesioner
5 Analisa hasil
6 Ujian akhir
Keterangan : : sudah di lakukan
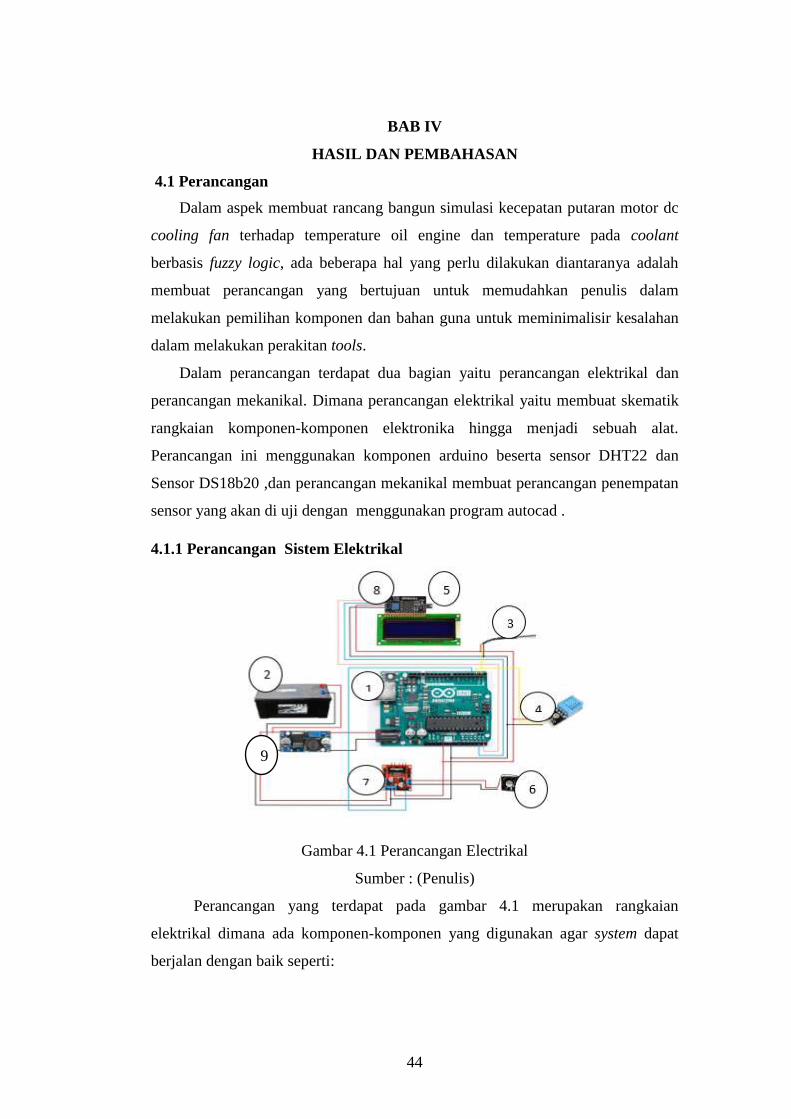
44
BAB IV
HASIL DAN PEMBAHASAN
4.1 Perancangan
Dalam aspek membuat rancang bangun simulasi kecepatan putaran motor dc
cooling fan terhadap temperature oil engine dan temperature pada coolant
berbasis fuzzy logic, ada beberapa hal yang perlu dilakukan diantaranya adalah
membuat perancangan yang bertujuan untuk memudahkan penulis dalam
melakukan pemilihan komponen dan bahan guna untuk meminimalisir kesalahan
dalam melakukan perakitan tools.
Dalam perancangan terdapat dua bagian yaitu perancangan elektrikal dan
perancangan mekanikal. Dimana perancangan elektrikal yaitu membuat skematik
rangkaian komponen-komponen elektronika hingga menjadi sebuah alat.
Perancangan ini menggunakan komponen arduino beserta sensor DHT22 dan
Sensor DS18b20 ,dan perancangan mekanikal membuat perancangan penempatan
sensor yang akan di uji dengan menggunakan program autocad .
4.1.1 Perancangan Sistem Elektrikal
Gambar 4.1 Perancangan Electrikal
Sumber : (Penulis)
Perancangan yang terdapat pada gambar 4.1 merupakan rangkaian
elektrikal dimana ada komponen-komponen yang digunakan agar system dapat
berjalan dengan baik seperti:
9
45
1. Arduino UNO 6. Fan Dc 12 Volt
2. Battery 12 Volt 7. Driver Motor DC L298N
3. Sensor Suhu Ds18b20 8. i2c (Integreted Integrated Circuit)
4. Sensor Suhu Dht22 9. Step down
5. LCD
Gambar 4.1 Menunjukkan perancangan sistem elektrikal, Power Supply
Arduino (1) berasal dari battery (2) sebesar 12 volt yang di turunkan tegangannya
menjadi tegangan operasi arduino antara 6V-12V memakai step down (9).
Terdapat 2 input sensor pada nomor (3), (4) yang di gunakan sebagai input yang
mendapat daya dari arduino melalui pin 5V, ketika sensor mendeteksi suhu maka
akan di tampilkan pada LCD (5). Kemudian terdapat driver motor pada nomor (7)
yang berfungsi sebagai pengatur putaran motor fan dan driver diberi daya 12V
dari batrai (6) berdasarkan output yang telah di fuzzykan pada arduino.
4.1.2 Perancangan Mekanikal
Berdasarkan gambar 4.2 Merupakan penempatan sensor 1 alat yang akan
mendeteksi temperatur pada coolant sebelum melewati thermostat, sedangkan
sensor 2 diletakkan pada bagian oil pan untuk mendeteksi temperature oli yang
ada di oil pan. Sensor ini akan mendeteksi suhu temperature pada cooling sistem
dan temperature pada lubricating system, setelah hasil kedua pembacaan sensor di
dapatkan maka selanjutnya akan di fuzzykan dengan sistem fuzzy logic yang telah
disematkan pada arduino, selanjutnya output yang di hasilkan yaitu putaran kipas
yang terbagi menjadi 3 bagian yaitu rendah, sedang, dan tinggi sesuai keadaan
temperature cooling sistem dan temperature lubricating sistem. Dimana kipas
tersebut akan mendinginkan radiator dan engine.

46
Gambar 4.2 Autocad
Sumber : (Penulis)
4.2 Proses Pembuatan Program
Setelah membuat gambar perancangan, selanjutnya penulis melakukan
pembuatan program terhadap keseluruhan komponen agar dapat bekerja sesuai
dengan yang diinginkan. Adapun program yang sudah dibuat dapat dilihat pada
gambar 4.3 dibawah ini.
Gambar 4.3 Proses Pembuatan Program
Sumber : (Penulis)
47
4.2.1 Penjelasan Program
Pemrograman untuk otak dari tool simulasi yang dibuat, dengan
menggunakan program arduino agar apa yang penulis inginkan dapat terlaksana
dan disesuaikan pada rangkaian sistem yang ingin di buat, berikut contoh
Pemprograman gambah di bawah ini :
Gambar 4.4 Sistem Pemprograman
Sumber : (Penulis)
Sertakan Library sensor dan LCD:
1. Library Sensor Ds18b20 : #Include <DallasTemperature.h>
2. Library Sensor DHT 22 : #Include <DHT.h>
3. Library lcd
Bagian deklarasi atau inisialisasi awal digunakan untuk mendeskripsikan
Variable-variabel yang akan digunakan dalam program utama dan juga untuk

48
menambah file-file program yang dibutuhkan untuk menjalankan program utama
antara lain:
Inisialisasi pin Input dari Sensor, dan Output kipas serta LCD :
1. Inisialisasi sensor Ds18b20 : #Define ONE_WIRE_BUS 2
#OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors (&oneWire);
2. Inisialisasi sensor DHT 22 : #Define DHTPIN 3
#Define DHTTYPE DHT22 //Memilih tipe
DHT
DHT dht(DHTPIN, DHTTYPE);
3. Inisilisasi pin LCD :
4. Inisialisasi pin output kipas : Int Pin Kipas = 6;
Inisialisasi untuk penamaan rumus fuzzy:
Float Suhu 1 Rendah;
Float Suhu 1 Rendah ;
Float Suhu 1 Sedang ;
Float Suhu 1 Tinggi ;
Float Suhu 2 Rendah ;
Float Suhu 2 Sedang ;
Float Suhu 2 Tinggi;
Float PWM Motor Rendah ;
Float PWM Motor Sedang ;
Float PWM Motor Tinggi ;
Void set up Untuk Mengatur baudrate Dan pembacaan sensor diserial monitor
Baudrate yang digunakan agar pembacaan sensor tertampil di serial monitor

49
Serial begin (9600);
Perintah komunikasi antara sensor DS18b20 dengan arduino
Serial println ("Dallas Temperature IC Control Library Demo");
Perintah komunikasi antara sensor DHT 22 dengan arduino
dht.begin(); //Komunikasi DHT dengan arduino
perintah koneksi Output kipas di pin 6 arduino
pinMode (6, OUTPUT);
Pembuatan void (fungsi) untuk proses fuzzyfikasi pembacaan sensor DS18b20 dan
DHT 22:
1. void FuzzySuhu1Rendah()
2. void FuzzySuhu1Sedang()
3. void FuzzySuhu1Tinggi()
4. void FuzzySuhu2Rendah()
5. void FuzzySuhu2Sedang()
6. void FuzzySuhu2Tinggi()
Void loop : pada void (fungsi) ini dituliskan program perintah jalannya alat,
dimana terdapat perintah untuk menampilkan pembacaan sensor Ds18b20 dan
DHT 22, tertampilnya nilai sensor pada LCD serta bekerjanya output berupa kipas
DC. Dimana program perintah antara input (sensor) dengan output kipas
berdasarkan rumus fuzzy logic.
1. Pembacaan sensor Ds18b20:
Serial.print(" Requesting temperatures...");
sensors.requestTemperatures
Serial.print("Temperature is: ");
Serial.print(sensors.getTempCByIndex(0));
2. Pembacaan sensor DHT 22:
float kelembaban = dht.readHumidity

50
float suhu = dht.readTemperature();
Serial.print("Kelembaban: "); //menampilkan tulisan Kelembaban di Serial
Monitor
Serial.print(kelembaban); //menampilkan nilai kelembaban
float kelembaban = dht.readHumidity(); //menyimpan nilai Humidity pada
variabel kelembaban
float suhu = dht.readTemperature(); //menyimpan nilai Temperature pada
variabel suhu
Serial.print("Kelembaban: "); //menampilkan tulisan Kelembaban di Serial
Monitor
Serial.print(kelembaban); //menampilkan nilai kelembaban
Serial.print("Suhu: "); //menampilkan tulisan suhu
Serial.println(suhu); //menampilkan nilai suhu
Serial.print("Suhu: "); //menampilkan tulisan suhu
Serial.println(suhu); //menampilkan nilai suhu
3. Program perintah berdasarkan rule fuzzy logic:
if ((Suhu1Rendah = 1) || (Suhu1Rendah == 0) || (Suhu1Rendah == (55 -
sensors.getTempCByIndex(0))/(55 - 45)) && (Suhu2Rendah == 1) ||
(Suhu2Rendah == (65 - dht.readTemperature() )/(65 - 55)) || (Suhu2Rendah
== 0))
{analogWrite(6 , 40);}
4.2.2 Prinsip Kerja
Pada saat mesin mulai di hidupkan, maka akan ada terjadinya pembakaran
di ruang bakar, pada saat terjadi pembakaran maka akan terjadi perpindahan kalor
panas pembakaran dengan dinding cylinder. Panas tersebut akan terus meningkat
seiring terjadinya pembakaran di ruang bakar, Sehingga di perlukan ruang
pendingin yang akan mendinginkan dinding silinder agar tidak terjadi panas
berlebihan. Yaitu adalah water jacket, Water jaket sendiri akan di lalui oleh cairan
pendingin yang bersirkulasi berdasarkan temperature engine.

51
Temperature engine akan terus meningkat ketika engine menyala, Maka
cooling sistem akan mengatur agar temperature berada di temperature kerja engine
dan mencegah terjadinya overhead. Salah satu komponen penting pada cooling
sistem adalah motor fan, Motor fan berfungsi sebagai pendingin dari cairan
pendingin yang bersirkulasi pada cooling sistem.
Untuk meningkatkan efektifitas dalam cooling sistem engine maka di
tambahkan dengan sistem fuzzy logic. Fuzzy logic sendiri iyalah suatu sistem yang
akan digunakan untuk mengatur kecepatan kipas motor yang ada pada cooling
sistem berdasarkan pembacaan sensor yang ada pada sistem engine. Terdapat 2
sensor suhu yang di gunakan dalam sistem fuzzy, yaitu sensor 1 yang ada pada
cooling sistem yang di gunakan untuk mendeteksi suhu yang ada pada cooling
sistem.
Kemudian sensor suhu 2 yang ada pada sistem lubricating yang berfungsi
untuk mendeteksi suhu oli engine. Ketika engine hidup maka sistem fuzzy akan
mulai berkerja, dan saat itulah pengambilan nilai suhu yang ada pada cooling
sistem dan lubricating sistem, yang kemudian nilai akan diolah oleh
microcontroller secara fuzzy. Kemudian mengatur kecepatan putar motor fan
cooling sistem

52
Gambar 4.2 Diagram Alur fuzzy logic
Sumber: (Penulis)
53
1. Menghubungkan sensor 1 dan sensor 2.
2. Setelah semua sensor bekerja sesuai fungsinya hasil dari pembacaan sensor
tersebut akan di olah atau di atur dengan menggunakan fuzzy logic.
3. Selanjutnya sensor yang telah diatur di sistem fuzzy akan menghasilkan
putaran kipas yang sudah disesuaikan oleh penulis yaitu putaran kipas rendah,
sedang, dan tinggi.
4. Sensor membaca temperature jika sensor 1 pada temperatur 40 dan sensor 2
50 putaran kipas yang dihasilkan rendah, sensor1 55 dan sensor2 65 putaran
kipas sedang dan sensor1 70 dan sendor2 80 putaran kipas tinggi.
4.3 Proses Pembuatan Alat
Setelah berbagai peroses dilakukan dalam dari perancangan awal tool, sampai
perancangan tool selesai. Maka penulis sampailah pada proses utama yaitu proses
pembuatan tool. Sebelum kita melangkah ke pembuatan tool maka kita harus
memahami job safety and analysis pada saat pembuatan tool yang di jelaskan
pada tabel 4.1 di bawah ini :
4.3.1 Job Safety Analysis
Berikut job safety dan analysis pembuatan tool yang dijelaskan pada tabel
4.1 dibawah ini.

54
Tabel 4.1 Job Safety and Analysis Pembuatan Tool
Uraian
Pekerjaan
Bahaya/Resiko Setiap
Pekerjaan
Rekomendasi Tindakan
Control
1. 1 Persiapan alat dan
bahan yang akan
di gunakan.
1.1. Terpeleset
1.2.Terkilir
1.3.Tersandung
1.1.1 Bersihkan dan
rapikan barang
diarea kerja yang
berserakan
1.2.1 Lakukan
tumpuan kaki
pada saaat mulai
mengangkat
toolbox.
1.2.2 Lakukan
pengangkatan
secara berhati-
hati
1.3.1 Pastikan handle
tool box dalam
keadaan baik
2. Pengeboran akrilik
atau mika tempat
alat.
2.1 Tersetrum
2.2 Terluka atau
tergoes pada saat
pengeboran akrilik
atau mika
2.3 Menghirup udara
yang tercapur
2.1.1 Pastikan kabel
tidak terkelupas
dan pastikan area
kerja dalam
kondsi kering.
2.2.1 Saat melakukan
pengeboran harus
berhati-hati
2.3.1.Menggunakan
masker

55
dengan gram-gram
akrilik atau mika
3 Memotong
akrilik/mika
dengan gerida
tangan.
3.1 Tergores
3.2 Menghirup udara
yang tercapur
dengan gram-gram
akrilik/mika
3.1.1 Gunakan APD
standar
3.2.1 Berhati-hati pada
saat melakukan
pemotongan
akrilik atau mika
dengan
menggunakan
gerinda tangan
4 Penyolderan 4.1 Tersetrum
4.2 Terkena solder
Panas
4.1.1 Pastikan kabel
tidak terkelupas
dan pastikan area
kerja dalam kondsi
kering.
4.1.2 Berhati-hati saat
penyolderan
5 Pengkoneksian
battery pada
rangkaian
5.1 Tersetrum
5.2 Percikan api
5.1.1 Berhati-hati saat
pengkoneksian.
5.2.1 Menggunakan
APD standar.
5.2.2 Terminal (+) dan
terminal(-) tidak
bersentuhan
56
4.3.2 Langkah –Langkah Pembuatan
Berikut adalah langkah-langkah yang dilakukan dalam proses pembuatan :
Gambar 4.4 Kotak Penempatan Komponen
Sumber : (Penulis)
Gambar 4.4 Adalah Proses membuat kotak penempatan komponen elektrikal
dengan ukuran panjang 18cm, lebar 15cm, tinggi 12,5cm.
Gambar 4.5 Penempatan Kipas
Sumber : (Penulis)
Gambar 4.5 Adalah Proses pembuatan untuk penempatan kipas.
Gambar.4.6 Peletakan Komponen Pada Kotak
Sumber : (Penulis)
Gambar 4.6 Adalah Proses peletakan komponen awal pada kotak sebelum
pengkoneksian ke arduino uno.

57
Gambar 4.7 Pengkoneksian sensor dht22
Sumber : (Penulis)
Gambar 4.7 Adalah Proses pengkoneksian sensor dht22 dengan arduino uno.
Gambar 4.8 Pengkoneksian sensor ds18b20
Sumber : (Penulis)
Gambar 4.8 Adalah Proses pengkoneksian sensor ds18b20 dengan arduino uno.
Gambar 4.9 Penempatan LCD
Sumber : (Penulis)
Gambar 4.9 Adalah Proses penempatan LCD
58
Gambar 4.10 Pengoneksian LCD
Sumber : (Penulis)
Gambar 4.10 Adalah Proses pengkoneksian LCD dengan arduino
Gambar 4.11 Pengkoneksian driver motor dengan kipas
Sumber : (Penulis)
Gambar 4.11 Adalah Proses pengkoneksian driver motor dengan kipas
Gambar 4.12 Check Komponen-Komponen
Sumber : (Penulis)
Gambar 4.12 Adalah Final Check untuk memastikan semua komponen telah
terkoneksi dan berfungsi dengan benar.

59
4.3.3 Waktu Pengerjaan dan Pembuatan tool
Berdasarkan pengerjaan dan pembuatan tool yang telah di lakukan oleh
penulis, dapat diselesaikan kurang lebih 12 (dua belas) hari, terhitung dari setelah
alat dan bahan yang di butuhkan sudah terkumpulkan.
4.3.4 Biaya Pembuatan
Berikut ini biaya pembuatan tool simulasi yang di keluarkan penulis, agar
dapat digunakan sebagai acuan ketika akan memperbanyak tool, yang di jelaskan
pada tabel 4.2 di bawh ini :
Tabel 4.2 Biaya Pembuatan Tool
NO. Bahan Jumlah Harga
1. Arduino UNO 1 Rp.95.000
2. Battery 12 volt 1 Rp.200.000
3. Lcd 1 Rp.25.000
4. Sensor suhu Ds18b20 2 Rp.97.000
5. Sensor suhu dht22 1 Rp.35.000
6. Miniboard 1 Rp.35.000
7. Kipas DC 12 volt 1 Rp.16.000
8. Driver Motor Dc L298N 1 Rp.40.000
9. I2c 1 Rp.25.000
10. Mika 1 Rp.80.000
11. Lem tembak 1 Rp.5.000
12. Timah 1 Rp.25.000
13. Obeng 1 Rp.37.000
14. Baut 18 Rp.52.000
15. Resistor 4,7 3 Rp.5.000
16. Kabel jumper 3 Rp.48.000
17. Kabel data 1 Rp.3.000
18. Pin header 10 Rp.10.000
TOTAL PEMBELIAN BAHAN Rp.833.000

60
4.4 Pengujian Alat
Pengujian alat simulasi dilakukan untuk mengetahui cara kerja dan untuk
mengetahui apakah perangkat sudah sesuai dengan perancangan atau belum sesuai
dengan yang diinginkan oleh penulis. Pengambilan data pengujian dilakukan tiap
bagian sistem serta dilakukan pengujian sistem secara keseluruhan. Adapun
pengujian yang dilakukan sebagai berikut:
1. Pengujian mikrokontroller arduino uno
2. Pengujian sensor suhu dht 22 dan ds18b20
3. Pengujian lcd
Tabel 4.3 Pengujian Alat
No. Uraian Pekerjaan Bahaya/Resiko Setiap
Pekerjaan
Rekomendasi
Tindakan Kontrol
1. Persiapan Alat 1.1. Terbentur
1.2. Terpeleset
1.3. Tersandung
1.1.2 Bersihkan dan
rapikan
barang diarea
kerja yang
berserakan
1.2.1 Lakukan
tumpuan kaki
pada saaat
mulai
mengangkat
toolbox.
1.2.2 Lakukan
pengangkatan
secara berhati-
hati
1.3.1. Pastikan
handle tool
box dalam
keadaan baik

61
1.4. Tergores 1.4.1. Berhati-hati
saat
melakukan
pekerjaan
.
2. Proses
Pemasangan Alat
ke engine
1.1. Tergores
1.2. Terkena oli
1.3. Terkena air coolant
1.1.1. Menggunakan
APD sesuai
dengan
Standar
3. Proses
Pengkoneksian
Alat Dengan
Battry
1.1. Tersetrum
1.1.1.Tangan keadaan
kering
1.1.2. Kabel tidak ada
yang
terkelupas
4 Proses pelepasan
sensor yang telah
digunakan
1.1 Terkena engine panas
saat pelepasan sensor
yang digunakan
1.2 Terkena Oli panas
1.1.1 Pastikan
engine dalam
keadaan
dingin
1.1.2 Pastikan saat
pelepasan
sensor yang
berhubungan
dengan oli
dalam keadaan
dingin
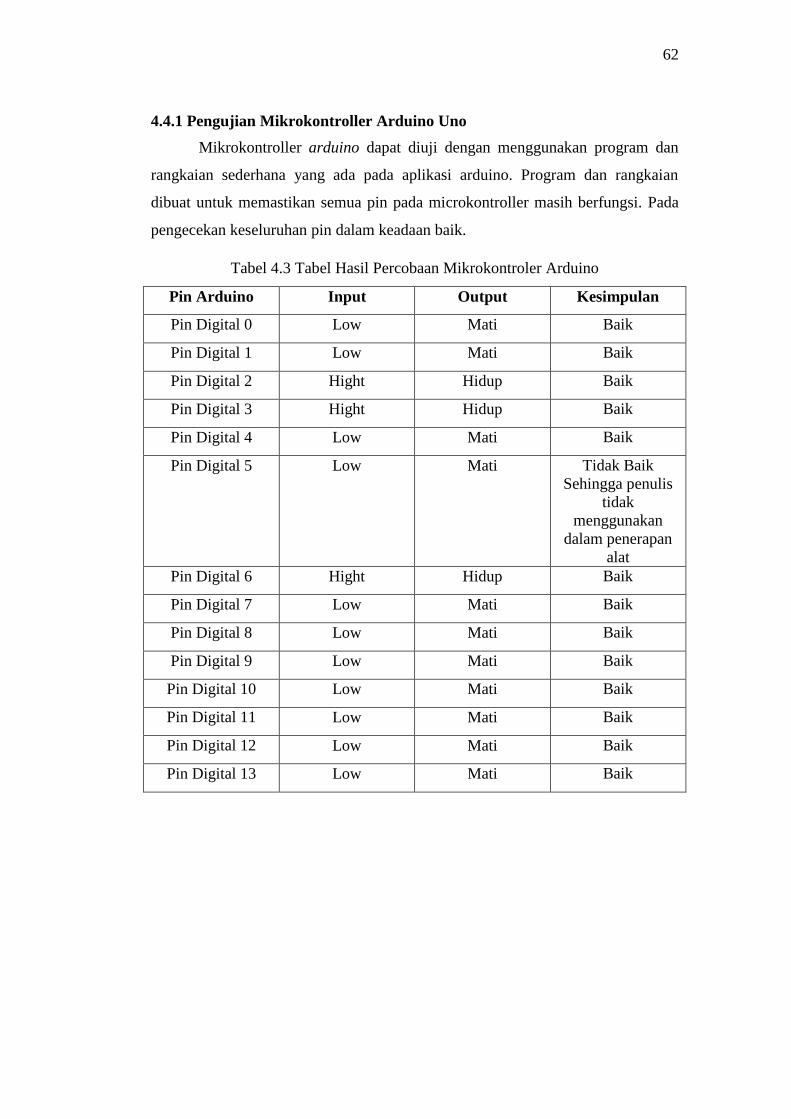
62
4.4.1 Pengujian Mikrokontroller Arduino Uno
Mikrokontroller arduino dapat diuji dengan menggunakan program dan
rangkaian sederhana yang ada pada aplikasi arduino. Program dan rangkaian
dibuat untuk memastikan semua pin pada microkontroller masih berfungsi. Pada
pengecekan keseluruhan pin dalam keadaan baik.
Tabel 4.3 Tabel Hasil Percobaan Mikrokontroler Arduino
Pin Arduino Input Output Kesimpulan
Pin Digital 0 Low Mati Baik
Pin Digital 1 Low Mati Baik
Pin Digital 2 Hight Hidup Baik
Pin Digital 3 Hight Hidup Baik
Pin Digital 4 Low Mati Baik
Pin Digital 5 Low Mati Tidak Baik
Sehingga penulis
tidak
menggunakan
dalam penerapan
alat
Pin Digital 6 Hight Hidup Baik
Pin Digital 7 Low Mati Baik
Pin Digital 8 Low Mati Baik
Pin Digital 9 Low Mati Baik
Pin Digital 10 Low Mati Baik
Pin Digital 11 Low Mati Baik
Pin Digital 12 Low Mati Baik
Pin Digital 13 Low Mati Baik

63
Gambar 4.10 Pengujian Kontroler Arduino Uno
Sumber: ( Penulis )
Dari pengujian konfigurasi pin arduino, didapatkan hasil bahawa semua
komponen yang dikontrol arduino dapat berjalan dengan baik sesuai dengan
program yang diinputkan. Berikut merupakan gambar dari kontroler arduino uno
yang digunakan pada alat simulasi.
4.4.2 Pengujian Sensor Suhu DHT 22 dan Sensor Suhu DS18B20
Pengujian sensor ini dilakukan untuk mengecek dan memastikan sensor
berfungsi atau tidak. Adapun hasil dari pengujiannya dapat dilihat pada tabel 4.4
dibawah ini.
Tabel 4.5 Pengujian Sensor Suhu DHT 22 dan Sensor Suhu DS18B20
No Fluida yang digunakan Sensor
1
Alat
Ukur
Sensor
2
Alat
Ukur
1 Air 28,4oc 29,6
oc 28,4
oc 29,6
oc
2 Solar 29,3oc 30,0
oc 29,3
oc 30,0
oc
3 Oli 30,3oc 30,4
oc 30,3
oc 30,4
oc
4 Coolant 27,2oc 27,4
oc 27,2
oc 27,4
oc
4.4.3 Pengujian LCD
Pengujian LCD dilakukan dengan memprogram untuk menampilkan
tulisan atau karakter pada LCD, kemudian mencocokan dengan tampilan karakter
pada layar LCD. Berikut merupakan listing program untuk menampilkan karaktrer
di LCD.

64
Gambar 4.11 Pengujian LCD
Sumber : ( Penulis )
4.4.4 Pengujian Alat Keseluruhan
Secara garis besar sistem yang dirancang terdiri atas battery yang
berfungsi sebagai energy listrik dan sensor DS18B20, ESP8266, arduino uno
berfungsi sebagai pengolah data. Pengujian ini dilakukan dengan menghubungkan
sensor DS18B20 pada mikrokontroller melalui port bus 2, port 5v dan ground
lalu memberikan program pembacaan sensor DS18B20 dan menampilkan
hasilnya pada thingspeak dan virtuino. Setelah itu meletakkan sensor pada cooling
system engine seperti pada gambar 4.12 dibawah ini.
Gambar 4.12 Penempatan Sensor
Sumber : ( Penulis)
Pengujian ini dilakukan pada engine kubota dengan serial number D905D.
Pengujian dilakukan selama 1 jam dan putaran awal kipas pada temperature 71ºC.
Hasil dari pengujian dapat dilihat melalui lcd dan monitor.

65
1. Membership Function Input sensor 1
Jumlah variabel membership function yang digunakan untuk input
temperatur mesin adalah tiga variabel, yaitu rebdah, sedang, tinggi.
Gambar 4.13 Membership Function Input
Sumber : ( Penulis)
2. Membership Function Input sensor 2
Jumlah variabel membership function yang digunakan untuk input
temperatur mesin adalah tiga variabel, yaitu rebdah, sedang, tinggi.
Gambar 4.14 Membership Function Input
Sumber : ( Penulis)

66
3. Membership Function Input sensor 3
Jumlah variabel membership function yang digunakan untuk input
temperatur speed engine adalah tiga variabel, yaitu rebdah, sedang, tinggi.
Gambar 4.15 Membership Function Input
Sumber : ( Penulis)
4. Membership Function Output
Variabel membership function untuk output adalah: rendah, sedang, tinggi.
Gambar 4.16 Membership Function Output
Sumber : ( Penulis)
67
5. Pembuatan Rule
Setelah selesai membuat input dan output membership function langkah
selanjutnya yaitu membuat rules. Jumlah rule yang digunakan ada 27 yaitu :
1. If(Suhu1 is Rendah) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Rendah
2. If(Suhu1 is Rendah) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Rendah
3. If(Suhu1 is Rendah) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
4. If(Suhu1 is Sedang) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Rendah
5. If(Suhu1 is Sedang) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang
6. If(Suhu1 is Sedang) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
7. If(Suhu1 is Tinggi) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Sedang
8. If(Suhu1 is Tinggi) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang
9. If(Suhu1 is Tinggi) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Tinggi
10. If(Suhu1 is Rendah) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Rendah
11. If(Suhu1 is Rendah) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang
12. If(Suhu1 is Rendah) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
13. If(Suhu1 is Sedang) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Sedang
14. If(Suhu1 is Sedang) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang

68
15. If(Suhu1 is Sedang) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Tinggi
16. If(Suhu1 is Tinggi) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Sedang
17. If(Suhu1 is Tinggi) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang
18. If(Suhu1 is Tinggi) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Tinggi
19. If(Suhu1 is Sedang) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Rendah
20. If(Suhu1 is Sedang) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
21. If(Suhu1 is Tinggi) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Tinggi
22. If(Suhu1 is Tinggi) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Sedang
23. If(Suhu1 is Tinggi) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
24. If(Suhu1 is Sedang) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Sedang
25. If(Suhu1 is Tinggi) and (suhu2 is Rendah) and (suhu3 is Rendah) then
(PWMKipas is Sedang
26. If(Suhu1 is Tinggi) and (suhu2 is Sedang) and (suhu3 is Rendah) then
(PWMKipas is Tinggi
27. If(Suhu1 is Tinggi) and (suhu2 is Tinggi) and (suhu3 is Rendah) then
(PWMKipas is Tinggi

69
Gambar 4.17 Pembuatan Rule
Sumber : ( Penulis )
Dari rule diatas diperoleh diagram surface viewer sebagai berikut:

70
Gambar 4.18 diagram surface viewer
Sumber : ( Penulis )
Dari diagram 4.17 dapatlah dijelaskan bahwa kontroler akan bekerja jika
temperatur mesin berada dikisaran 70º sampai dengan 100º C dan temperatur 1
dikisaran 70ºC sampai dengan 100ºC
Untuk temperatur dibawah atau diatas kisar yang dijelaskan dapat
dirancang sekehendak pembuat program. Pada program ini dirancang apabila
temperatur lebih kecil dari nilai minimal tabel maka yang dihasilkan sebesar 0%
tetapi karena mikrokontroler memerlukan waktu untuk menghitung program maka
tetaplah keluar sebesar 2%. Sementara untuk kisar temperatur diatas yang ada
digambar maka akan dikeluarkan sebesar 100% tetapi karena mikrokontroler
memerlukan waktu untuk menghitung program maka yang keluar sebesar 98%.
Gambar 4.19 Battery
Sumber : ( Penulis )
Gambar 4.18 menjelaskan bahwa baterai berfungsi sebagai sumber energi untuk
menghasilkan arus listrik yang dapat menghidupkan engine.

71
Gambar 4.20 Sensor 1
Sumber : ( Penulis )
Gambar 4.19 menjelaskan bahwa sensor 1 telah terpasang dan di uji pada engine
yang akan mendeteksi temperatur pada coolant sebelum melewati thermostat.
Gambar 4.21 Sensor 2
Sumber : ( Penulis )
Gambar 4.20 menjelaskan bahwa sensor 2 telah terpasang dan di uji pada engin
yang akan mendeteksi temperatur pada bagian oil pan untuk mendeteksi
temperature oli setelah melewati oil cooler.
Gambar 4.22 Kipas Berputar
Sumber : ( Penulis )

72
Gambar 4.21 Menjelaskan bahwa sensor telah bekerja sesuai fungsinya dimana
kipas berputar pada saat temperatur yang telah di atur yaitu 71 kipas sudah mulai
bekerja dengan putaran rendah .
Gambar 4.23 LCD Telah Bekerja
Sumber : ( Penulis )
Menurut gambar 4.22 Menjelaskan bahwa LCD telah bekerja dan menampilakan
hasil pembacaan dari sensor 1 dan sensor 2 .
Gambar 4.24 sereal monitor
Sumber : ( Penulis )
Gambar 4.23 menjelaskan bahwa hasil keseluruhan yang telah diuji telah terbaca
pada sereal monitor dengan rinci sesuai hasil pembacaan dari sensor 1 dan sensor
2.
6. Pengujian Kecepatan Putaran Kipas
Pada pengujian putaran kipas ini bertujuan untuk mengetaahui PWM dan
RPM melalui hasil yang di baca oleh sensor yang telah di uji.

73
Tabel 4.6 Hasil Kecepatan Putaran Kipas
Sensor1
Seansor 2 PWM RPM
40 50 45,7 79,5
40 55 45,7 79,5
45 60 53 911
45 65 45,7 795
50 50 53 911
55 65 125 1662
55 75 207 2203
60 75 199 2146
65 65 207 2186
65 70 199 2146
70 70 207 2203
4.5 Perawatan dan Penyimpanan
Cara perawatan dan penyimpanan tool yang benar, agar alat dapat bertahan lama,
berikut cara perwatan dan penyimpanan tool :
1. Simpanlah tool di tempat yang kering, dan terhindar dari air.
2. Usahakan tool selalu dalam keadaan yang bersih.

73
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan data yang diperoleh selama melakukan penelitian maka dapat
ditarik sebuah kesimpulan sebagai berikut :
1. Perancangan yang dilakukan penulis sesuai gambar perancangan elektrikal
untuk memanimalisir kesalahan saat pemilihan komponen dan
perancangan mekanikal mempermudah penulis dalam meletakkan sensor
yang digunakan.
2. Program pada alat simulasi ini dapat bekerja dengan baik sesuai perinsip
kerja dengan menggunakan program fuzzy yang telah di sematkan pada
Arduino Uno.
3. Dengan adanya sensor satu, dua dan tiga dapat memberikan informasi
mengenai temperature engine sehingga dapat mengantisipasi engine agar
tidak mudah terjadinya overheat.
4. Pembuatan alat simulasi ini penulis mengatur putaran kipas Rendah,
Sedang, Dan Tinggi sesuai dengan pembacaan input dari sensor suhu dan
program fuzzy yang ditanamkan pada Arduino Uno.
5. Proses pembuatan alat dapat dilakukan sesuai perancangan alat simulasi
yang telah dilakukan.
5.2 Saran
Adapun saran yang disampaikan penulis sebagai berikut :
1. Penambahan aturan – aturan fuzzy untuk membuat alat simulasi lebih
bagus.
2. Agar kedepannya alat simulasi ini dapat di aplikasikan dan di kembanggan
di penelitian selanjutnya.
3. Untuk mendapatkan data yang lebih spesifik diharapkan penelitian
selanjutnya dapat menambahkan salah satu komponen yang berupa sensor
termokopel kedalam rangkaian yang penulis buat.
74
DAFTAR PUSTAKA
Qory Hidayati, Mikail Eko Prasetyo, (2016). Pengaturan Kecepatan Motor DC
dengan Menggunakan Mikrokontroler Berbasis Fuzzy-PID.Wahyunggoro,
(2004).
Fahmizal_note, ( 2008 dan 2010 ). Pengaturan Kecpatan Motor DC Dengan
Mikrokontroler ( Open - Loop).
Sodikin Susa’at (Widyaiswara Madya VEDC Malang), ( 2014 – 2015 ). Kontrol
Kecepatan Motor DC Berbasis Logika Fuzzy Mengguanakan
Mikrokontroler.
Anton Dwi Mardani, ( 2014 ). Pemodeln Dan Simulasi Kecepatan Motor DC
Berbasis Fuzzy Logic kontroler Dengan 5 Fungsi Keanggotaan ( Beban
Tetap ).
Bara Agung Perdamaian, (2003). Pemodelan dan Simulasi Kecepatan Motor DC
Berbasis Fuzzy Logic Controller Dengan 3 Fungsi Keanggotaan.
Annis Hannawati dan kawan kawan, frame work teknik perancangan kendali
temperatur berbasis fuzzy logic.
Muhammad Muhlas, ( 2015 ). Merancang pengaturan putaran kipas pendingin
mesin mobil.