l.a pengereman
DESCRIPTION
laporan akhir dari modul pengereman praktikum kendali motor induksiTRANSCRIPT

I. Maksud dan tujuan praktikum pengereman motor induksi
Mengetahui macam-macam pengereman pada motor induksi.
Menetahui karakteristik pengereman pada motor induksi.
II. Alat dan bahan yang digunakan
Autotrafo 3 phasa
Ampere meter DC
Ampere meter AC
Volt meter AC
Volt meter DC
Watt meter
Penyearah
Jamper secukupnya
Unit beban

III. Teori dasar
TEORI DASAR
Motor induksi secara prinsip dapat dianalogikan dengan sebuah transformator,
hanya saja yang membedakannya adalah pada motor induksi, rangkaian sekundernya
berputar. Maka motor induksi dapat dianalogikan dengan sebuah transformator dan
oleh karena itu cara menganalisaannya juga sama.
Gambar 2.1 Rangkaian Motor Induksi
Apabila motor berputar, maka parameter-parameter yang ada hubungannya
dengan frekuensi akan berubah. Pada saat motor berputar tanpa beban, besarnya daya
yang diserap oleh motor Po hanya dipergunakan untuk mengatasi rugi-rugi inti dan
rugi mekanik. Daya yang dihasilkan (dengan masukan 3 Ø ), sebanding dengan
tegangan, arus serta faktor bebannya.
Motor induksi bekerja sebagai berikut, Listrik dipasok ke stator yang akan
menghasilkan medan magnet. Medan magnet ini bergerak dengan kecepatan sinkron
disekitar rotor. Arus rotor menghasilkan medan magnet kedua, yang berusaha untuk
melawan medan magnet stator, yang menyebabkan rotor berputar. Walaupun begitu,
didalam prakteknya motor tidak pernah bekerja pada kecepatan sinkron namun pada
“kecepatan dasar” yang lebih rendah. Terjadinya perbedaan antara dua kecepatan
tersebut disebabkan adanya “slip/geseran” yang meningkat dengan meningkatnya
beban. Slip hanya terjadi pada motor induksi. Untuk menghindari slip dapat dipasang
sebuah cincin geser/ slip ring, dan motor tersebut dinamakan “motor cincin geser/slip
ring motor.
Persamaan berikut dapat digunakan untuk menghitung persentase
slip/geseran(Parekh, 2003):
% Slip = (Ns – Nb)/Ns x 100
Dimana:
Ns = kecepatan sinkron dalam RPM
Nb = kecepatan dasar dalam RPM

Hubungan antara beban, kecepatan dan torsi
Gambar 2.2 Grafik Torsi vs Kecepatan Motor Induksi
Gambar 2.2 menunjukan grafik torsi vs kecepatan motor induksi AC tiga fase dengan
arus yang sudah ditetapkan. Bila motor :
Mulai menyala ternyata terdapat arus nyala awal yang tinggi dan torsi yang
rendah (“pull-up torque”).
Mencapai 80% kecepatan penuh, torsi berada pada tingkat tertinggi (“pull-out
torque”) dan arus mulai turun.
Pada kecepatan penuh, atau kecepatan sinkron, arus torsi dan stator turun ke
nol.

KONSTRUKSI & RANGKAIAN EKIVALEN SETIAP PERCOBAAN
A. Konstruksi
Konstruksi motor induksi secara detail terdiri atas dua bagian, yaitu :
Rotor. Motor induksi menggunakan dua jenis rotor:
Rotor kandang tupai terdiri dari batang penghantar tebal yang
dilekatkan dalam petak-petak slots paralel. Batang-batang tersebut
diberi hubungan pendek pada kedua ujungnya dengan alat cincin
hubungan pendek.
Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan
terdistribusi. Dibuat melingkar sebanyak kutub stator. Tiga fase
digulungi kawat pada bagian dalamnya dan ujung yang lainnya
dihubungkan ke cincin kecil yang dipasang pada batang as dengan
sikat yang menempel padanya.
Rotor motor induksi terdiri dari bagian-bagian sebagai berikut.
1. Inti rotor, bahannya dari besi lunak atau baja silikon sama dengan
inti stator.
2. Alur, bahannya dari besi lunak atau baja silikon sama dengan inti.
Alur merupakan tempat meletakkan belitan (kumparan) rotor.
3. Belitan rotor, bahannya dari tembaga.
4. Poros atau as.
Stator. Stator dibuat dari sejumlah stampings dengan slots untuk
membawa gulungan tiga fase. Gulungan ini dilingkarkan untuk sejumlah
kutub yang tertentu. Gulungan diberi spasi geometri sebesar 120 derajat.
Stator motor induksi pada dasarnya terdiri dari bagian-bagian sebagai
berikut.
1. Rumah stator (rangka stator) dari besi tuang.
2. Inti stator dari besi lunak atau baja silikon.
3. Alur, bahannya sama dengan inti, dimana alur ini merupakan tempat
meletakkan belitan (kumparan stator).
4. Belitan (kumparan) stator dari tembaga.
Rangka stator motor induksi didisain dengan empat tujuan yaitu:
1. Menutupi inti dan kumparannya.
2. Melindungi bagian-bagian mesin yang bergerak dari kontak
langsung dengan manusia dan dari goresan yang disebabkan oleh
gangguan objek atau gangguan udara terbuka (cuaca luar).
3. Menyalurkan torsi ke bagian peralatan pendukung mesin dan oleh
karena itu stator didisain untuk tahan terhadap gaya putar dan
goncangan.
4. Berguna sebagai sarana rumahan ventilasi udara sehingga
pendinginan lebih efektif.
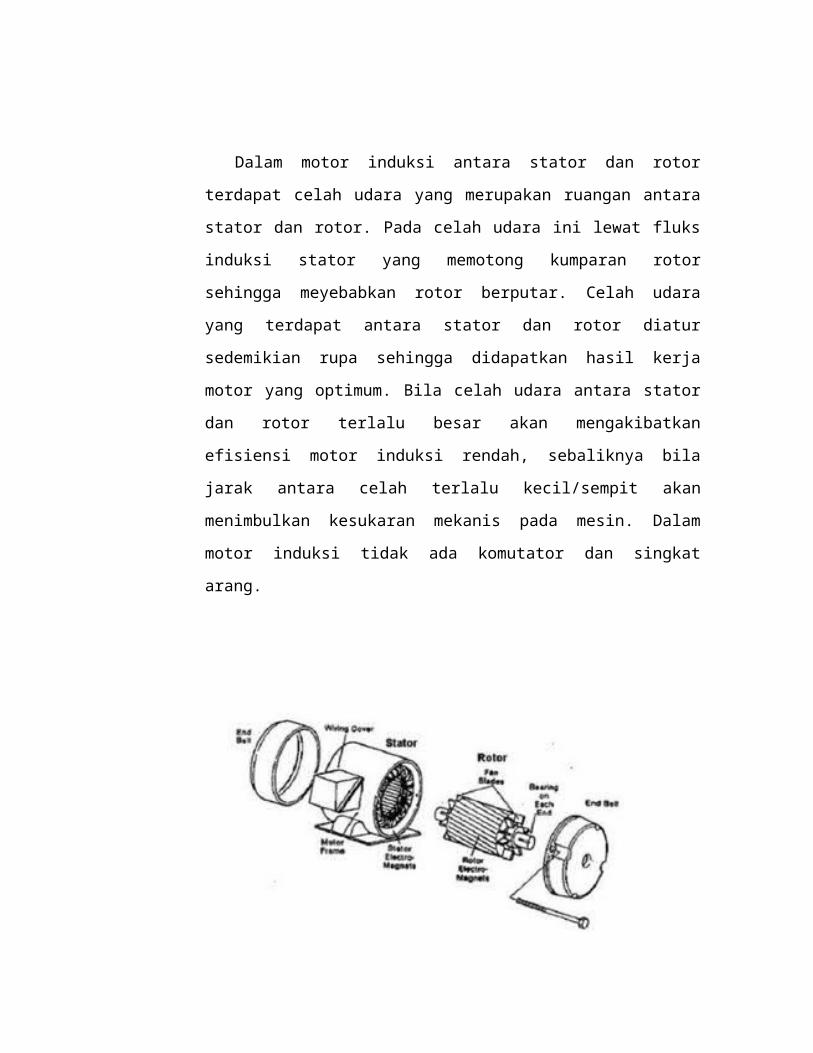
Dalam motor induksi antara stator dan rotor terdapat celah udara yang
merupakan ruangan antara stator dan rotor. Pada celah udara ini lewat fluks
induksi stator yang memotong kumparan rotor sehingga meyebabkan rotor
berputar. Celah udara yang terdapat antara stator dan rotor diatur sedemikian
rupa sehingga didapatkan hasil kerja motor yang optimum. Bila celah udara
antara stator dan rotor terlalu besar akan mengakibatkan efisiensi motor
induksi rendah, sebaliknya bila jarak antara celah terlalu kecil/sempit akan
menimbulkan kesukaran mekanis pada mesin. Dalam motor induksi tidak ada
komutator dan singkat arang.
Gambar 2.3 Konstruksi Motor Induksi

Metode pengereman motor listrik
Dapat dilakukan secara elektrik, yaitu dengan metode pengereman
dinamis dan metode pengereman pluging. Kedua metode pengereman motor
secara elektrik tersebut memiliki kelebihan dan kekurangan masing – masing.
Metode pengereman secara dinamis dan pluging memiliki tujuan yang sama,
yaitu sama-sama bertujuan untuk menghentikan putaran motor listrik dengan
lebih cepat. Secara lebih detil kedua metode pengereaman motor tersebut
dapat diuraikan sebagai berikut.
Metode Pengereman Dinamik
Pengereman yang dilakukan dengan melepaskan jangkar yang
berputar dari sumber tegangan dan memasangkan tahanan pada terminal
jangkar. Oleh karena itu kita dapat berbicara tentang waktu mekanis T
konstan dalam banyak cara yang sama kita berbicara tentang konstanta waktu
listrik sebuah kapasitor yang dibuang ke dalam sebuah resistor. Pada
dasarnya, T adalah waktu yang diperlukan untuk kecepatan motor jatuh ke
36,8 persen dari nilai awalnya. Namun, jauh lebih mudah untuk menggambar
kurva kecepatan-waktu dengan mendefinisikan konstanta waktu baru To yang
merupakan waktu untuk kecepatan dapat berkurang menjadi 50 persen dari
nilai aslinya. Ada hubungan matematis langsung antara konvensional
konstanta waktu T dan setengah konstanta waktu TOBuku ini diberikan oleh :
To=0,639T
Kita dapat membuktikan bahwa waktu mekanis ini konstan diberikan oleh :
To= Jn2 1131 .5 P 1
dimana
To = waktu untuk kecepatan motor jatuh ke satu-setengah dari nilai
sebelumnya [s]
J = momen inersia dari bagian yang berputar, yang disebut poros motor [kg ×
m]
n1 = awal laju pengereman motor saat mulai [r / min]
P1 = awal daya yang dikirim oleh motor ke pengereman resistor [W]
131,5 = konstan [exact value = (30 / p) 2 loge 2]
0,693 = konstan [exact value = loge 2]
Persamaan ini didasarkan pada asumsi bahwa efek pengereman sepenuhnya
karena energi pengereman didisipasi di resistor. Secara umum, motor
dikenakan tambahan akibat torsi pengereman windage dan gesekan, sehingga
waktu pengereman akan lebih kecil dari yang diberikan oleh persamaan
diatas.
PengeremanElektrik
Pengereman secara elektrik, torsi pengereman dihasilkan
berdasarkan nilai arusinjeksi yang diberikan pada belitan stator.Pada
pengereman secara elektrik energiputaran rotor diubah menjadi
energi elektrik yangkemudian dikembalikan ke suplai daya,
ataudengan memberikan suatu medan magnet stasionerpada stator
sehingga putaran rotor akan berkurangdengan sendirinya,
pengereman secara elektriklebih halus dan tidak ada hentakan yang
terjadi.
Pengereman secara elektrik tidak dapatmenghasilkan torsi
untuk menahan beban dalamkeadaan sudah berhenti dan
membutuhkan sumberenergi listrik untuk mengoperasikannya.

IV. Prosedur percobaan
a. Pengeremanan Dinamik
1. Buatlah rangkaian seperti gambar dibawah.
2. Laporkan rankaian percobaan pada asisten.
3. Naikan saklar handle.
4. Nyalakan autotrafo.

5. Nyalakan motor dengan mengatur tegangan autotrafo.
6. Naikan arus eksitasi sampai maksimum.
7. Catat hasil besaran pengukuran dari percobaan.
8. Kecilkan arus eksitasi.
9. Kecilkan tegangan autotrafo sampai nol.
10. Nyalakan saklar injeksi DC.
11. Percobaan selesai dan matikan semua peralatan.
b. Pengereman regenerative
1. Buatlah rangkaian seperti gambar dibawah.

2. Laporkan rankaian percobaan pada asisten.
3. Naikan saklar handle.
4. Nyalakan autotrafo.
5. Nyalakan motor dengan mengatur tegangan autotrafo.
6. Naikan arus eksitasi.
7. Catat hasil pengukuran yang didapat dari percobaan.
8. Kecilkan arus eksitasi.
9. Kecilkan tegangan autotrafo sampai nol.
10. Nyalakan beban yang ada.
11. Lepaskan pengereman, percobaan selesai dan matikan semua
peralatan.

V. Wiring diagram dan single line
Wirring diagram pengereman dinamik

Wirring diagram pengereman regeneratif

Single line pengereman dinamik
Single line pengereman regeneratif

VI. Data pengamatan
Data pengamatan pengereman motor induksi
Putaran motor
(rpm)
Tegangan
(volt)
Waktu
(sec)
Tegangan exitacy
(volt)
1500 13,2 13,11 -
1499 139,3 4,04 204,4
1497 233,2Dengan beban 1
4,29203,2
1495 228,8Dengan beban 2
3,64205,4
1494 228,2Dengan beban 3
3,24204,4
VII. Analisa
Dari praktikm pengereman pada motor induksi dapat dianalisa yaitu
Pada percobaan pertama yaitu tanpa tegangan exitacy didapat data putaran motor =
1500 rpm, tegangan = 13,2 volt, waktu =13,11 sec, artinya pada pengereman ini di
butuhkan waktu cukup lama agar motor bisa berhenti tanpa adanya tegangan exitacy,
pada tegangan yang didapat ada kesalahan pada pengukuran atau penggunaan alat
ukur sehingga didapat tegangan yang kecil.
Pada percobaan kedua yaitu dengan ditambahkannya tegangan exitacy, dengan
adanya tegangan exitacy ini pengeremannya jauh lebih cepat dibandingkan tanpa
tegangan exitacy karena tegangan ini sebagai gaya lawan pada putaran rotor tersebut
sehingga motor dapat berhenti dengan cepat.

Pada percobaan ketiga yaitu dengan tegangan exitacy dan beban lampu 1 buah
didapat data putaran motor = 1497 rpm, tegangan = 233,2 volt, waktu =4,29 sec,
tegangan excitacy = 203,2 volt, artinya pada pengereman ini motor dapat berhenti
lebih cepat di bandingkan percobaan pertama karena adanya tegangan exitacy
sehingga terdapat gaya lawan pada rotor maka motor dapat berhenti lebih cepat.
Untuk percobaan ke empat dan seterusnya bebannya di tambah sehinga semakain
banyak beban yang ditambahkan maka semakin cepat pengereman pada motor
induksi.
VIII. Kesimpulan
Dari percobaan pengereman motor induksi dengan injeksi sumber DC dapat
disimpulkan
Dapat mengetahui macam-macam pengereman pada motor induksi, menetahui
karakteristik pengereman pada motor induksi.
Pada percobaan dinamis dibutuhkan pengereman cukup lama tanpa adanya tegangan
exitacy namun dengan ditambahkannya tegangan exitacy cukup cepat pengereman
yang dihasilkan.
Untuk percobaan regeneratif pengereman yang dihasilkan jauh lebih cepat karena
adanya tambahan beban yang beupa lampu.