bab iv pengujian dan analisisrepository.uksw.edu/bitstream/123456789/14086/4/t1_612011019_bab...
TRANSCRIPT

BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini berisikan tentang penjelasan dan hasil dari pengujian alat yang telah
dibuat. Pengujian dilakukan untuk mengetahui bagaimana kinerja serta untuk
mengetahui tingkat keberhasilan alat yang bekerja sesuai dengan spesifikasi.
Pengujian alat ini meliputi bagian slider timelapse sebagai alat yang dikendalikan
dan smartphone android sebagai pengendali alat.
4.1. Slider Timelapse
Pada bagian slider timelapse ini akan dijelaskan mengenai pengujian waktu gerak
slider dan analisis perhitungan gerak translasi rotasi.
4.1.1. Pengujian Waktu Gerak Slider
Pengujian waktu gerak slider ini dilakukan untuk mengetahui selisih waktu yang
telah dimasukkan oleh pengguna dengan waktu realisasi gerakan slider dari start hingga
finish.
Metode pengujian yang digunakan adalah masukan waktu dari pengguna
dimasukkan melalui serial monitor, kemudian waktu realisasi gerakan slider dihitung
menggunakan timer yang dibuat dalam Arduino yang kemudian ditampilkan pada serial
monitor dan juga menggunakan stopwatch sebagai pembanding.
Kriteria keberhasilan dalam pengujian ini, slider dapat bergerak sesuai dengan
waktu yang telah dimasukkankan oleh pengguna.

Gambar 4.1. Metode Pengujian Gerak Slider
Pengujian gerak slider meliputi semua mode gerakan pada slider yaitu translasi,
rotasi dan translasi rotasi. Berikut adalah tabel hasil pengujian waktu gerak slider yang
telah dilakukan:

Tabel 4.1. Hasil Pengujian Waktu Gerak Translasi
NO
MASUKAN
WAKTU
(MENIT)
Pengujian 1 Pengujian 2 Pengujian 3
Selisih
Persentase
Ralat (%) SERIAL STOPWATCH SERIAL STOPWATCH SERIAL STOPWATCH
1 0,5 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:01 3,33
2 1 0:01:00 0:01:00 0:01:00 0:01:00 0:01:00 0:01:00 0:00:00 0
3 5 0:04:54 0:04:54 0:04:54 0:04:54 0:04:54 0:04:54 0:00:04 1,33
4 10 0:09:55 0:09:55 0:09:55 0:09:55 0:09:55 0:09:55 0:00:05 0,83
5 15 0:14:52 0:14:52 0:14:52 0:14:52 0:14:52 0:14:52 0:00:08 0,88
6 20 0:19:49 0:19:49 0:19:49 0:19:49 0:19:49 0:19:49 0:00:11 0,91
7 30 0:29:43 0:29:43 0:29:43 0:29:43 0:29:43 0:29:43 0:00:17 0,94
8 40 0:38:37 0:38:37 0:38:37 0:38:37 0:38:37 0:38:37 0:01:23 3,45
9 50 0:49:57 0:49:57 0:49:57 0:49:57 0:49:57 0:49:57 0:00:03 0,1
10 60 0:59:01 0:59:01 0:59:01 0:59:01 0:59:01 0:59:01 0:00:59 1,6
11 70 1:08:05 1:08:05 1:08:05 1:08:05 1:08:05 1:08:05 0:01:55 2,7
12 80 1:19:25 1:19:25 1:19:25 1:19:25 1:19:25 1:19:25 0:00:35 0,7
13 90 1:28:29 1:28:29 1:28:29 1:28:29 1:28:29 1:28:29 0:01:31 1,68
14 100 1:37:33 1:37:33 1:37:33 1:37:33 1:37:33 1:37:33 0:02:27 2,45
15 110 1:48:53 1:48:53 1:48:53 1:48:53 1:48:53 1:48:53
0:01:07 1,01
16 120 1:57:57 1:57:57 1:57:57 1:57:57 1:57:57 1:57:57 0:02:03 1,7
Selisih
Maksimum 0:02:27
Ralat
Maksimum
3,45
Keterangan :
Selisih merupakan selisih antara input waktu dengan waktu realisasi slider.

Tabel 4.2. Hasil Pengujian Waktu Gerak Rotasi
NO
MASUKAN
WAKTU
(MENIT)
Pengujian 1 Pengujian 2 Pengujian 3
Selisih
Persentase
Ralat (%) SERIAL STOPWATCH SERIAL STOPWATCH SERIAL STOPWATCH
1 0,5 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:01 3,33
2 1 0:01:01 0:01:01 0:01:01 0:01:01 0:01:01 0:01:01 0:00:01 1,6
3 5 0:05:01 0:05:01 0:05:01 0:05:01 0:05:01 0:05:01 0:00:01 0,33
4 10 0:10:02 0:10:02 0:10:02 0:10:02 0:10:02 0:10:02 0:00:02 0,33
5 15 0:15:03 0:15:03 0:15:03 0:15:03 0:15:03 0:15:03 0:00:03 0,33
6 20 0:20:03 0:20:03 0:20:03 0:20:03 0:20:03 0:20:03 0:00:03 0,25
7 30 0:30:05 0:30:05 0:30:05 0:30:05 0:30:05 0:30:05 0:00:05 0,27
8 40 0:38:43 0:38:43 0:38:43 0:38:43 0:38:43 0:38:43 0:01:17 3,2
9 50 0:49:28 0:49:28 0:49:28 0:49:28 0:49:28 0:49:28 0:00:32 1,06
10 60 1:00:13 1:00:13 1:00:13 1:00:13 1:00:13 1:00:13 0:00:13 0,36
11 70 1:08:49 1:08:49 1:08:49 1:08:49 1:08:49 1:08:49 0:01:11 1,69
12 80 1:19:34 1:19:34 1:19:34 1:19:34 1:19:34 1:19:34 0:00:26 0,54
13 90 1:30:19 1:30:19 1:30:19 1:30:19 1:30:19 1:30:19 0:00:19 0,35
14 100 1:38:55 1:38:55 1:38:55 1:38:55 1:38:55 1:38:55 0:01:05 1,08
15 110 1:49:40 1:49:40 1:49:40 1:49:40 1:49:40 1:49:40 0:00:20 0,3
16 120 1:58:16 1:58:16 1:58:16 1:58:16 1:58:16 1:58:16 0:01:44 1,4
Selisih
Maksimum 0:01:44
Ralat
Maksimum
3,33
Keterangan :
Selisih merupakan selisih antara input waktu dengan waktu realisasi slider.

Tabel 4.3. Hasil Pengujian Waktu Gerak Translasi Rotasi
NO
MASUKAN
WAKTU
(MENIT)
Pengujian 1 Pengujian 2 Pengujian 3
Selisih
Persentase
Ralat (%) SERIAL STOPWATCH SERIAL STOPWATCH SERIAL STOPWATCH
1 0,5 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:31 0:00:01 3,33
2 1 0:01:02 0:01:02 0:01:02 0:01:02 0:01:02 0:01:02 0:00:02 3,33
3 5 0:04:57 0:04:57 0:04:57 0:04:57 0:04:57 0:04:57 0:00:03 1
4 10 0:09:52 0:09:52 0:09:52 0:09:52 0:09:52 0:09:52 0:00:08 1,33
5 15 0:14:48 0:14:48 0:14:48 0:14:48 0:14:48 0:14:48 0:00:12 1,33
6 20 0:19:44 0:19:44 0:19:44 0:19:44 0:19:44 0:19:44 0:00:16 1,33
7 30 0:29:35 0:29:35 0:29:35 0:29:35 0:29:35 0:29:35 0:00:25 1,38
8 40 0:39:27 0:39:27 0:39:27 0:39:27 0:39:27 0:39:27 0:00:33 1,37
9 50 0:49:18 0:49:18 0:49:18 0:49:18 0:49:18 0:49:18 0:00:42 1,4
10 60 0:59:10 0:59:10 0:59:10 0:59:10 0:59:10 0:59:10 0:00:50 1,38
11 70 1:09:02 1:09:02 1:09:02 1:09:02 1:09:02 1:09:02 0:00:58 1,38
12 80 1:18:53 1:18:53 1:18:53 1:18:53 1:18:53 1:18:53 0:01:07 1,39
13 90 1:28:45 1:28:45 1:28:45 1:28:45 1:28:45 1:28:45 0:01:15 1,38
14 100 1:38:37 1:38:37 1:38:37 1:38:37 1:38:37 1:38:37 0:01:23 1,38
15 110 1:48:28 1:48:28 1:48:28 1:48:28 1:48:28 1:48:28 0:01:32 1,39
16 120 1:58:31 1:58:31 1:58:31 1:58:31 1:58:31 1:58:31 0:01:29 1,23
Selisih
Maksimum 0:01:32
Ralat
Maksimum
3,33
Keterangan :
Selisih merupakan selisih antara input waktu dengan waktu realisasi slider.

Dari data hasil pengujian yang dilakukan, ralat waktu maksimum yang dihasilkan
adalah sebagai berikut:
Tabel 4.4. Ralat Waktu Maksimum
Mode Gerakan Ralat Waktu Maksimum (%)
Translasi 3,45
Rotasi 3,33
Translasi Rotasi 3,33
Pada tabel (Tabel 4.1., 4.2. dan 4.3.) dapat dilihat bahwa hasil dari selisih yang
dihasilkan tidaklah linear, hal ini disebabkan oleh fungsi delay pada Arduino tidak dapat
membaca data berupa float maupun double dari delay yang dihasilkan oleh perhitungan,
sehingga data yang terbaca merupakan hasil dari pembulatan. Adapun perhitungan
untuk mencari nilai fungsi delay telah dijelaskan pada sub-bab
4.1.2. Pengujian Mode Gerak Translasi Rotasi
Metode pengujian mode gerak translasi rotasi ini adalah dengan mengamati gerak
dari slider dan dudukan kamera melalui aplikasi pada kamera, kemudian sudut akhir
dari gerakan kamera diukur menggunakan busur. Pengujian dilakukan dengan empat
macam perkiraan masukan jarak, masing-masing sebanyak sepuluh kali.
Kriteria keberhasilan pengujian pada mode gerak translasi rotasi ini adalah
gerakan dari slider dan dudukan kamera dapat berfokus pada objek yang telah diletakan
sesuai dengan perkiraan jarak. Berikut adalah data dari pengujian mode gerak translasi
rotasi.

Gambar 4.2. Pengujian Mode Gerak Translasi Rotasi
Gambar 4.3. Pengujian Mode Gerak Translasi Rotasi

Gambar 4.4. Pengujian Mode Gerak Translasi Rotasi
Tabel 4.5. Hasil Pengujian Mode Gerak Translasi Rotasi
Jarak
(cm)
Selisih Sudut Akhir pada Pengujian Selisih
Maksimum 1
(°)
2
(°)
3
(°)
4
(°)
5 (°) 6
(°)
7
(°)
8
(°)
9 (°) 10
(°)
35 0 0 0 0 0 0 0 0 0 0 0
60 0 0 0 0 0 0 0 0 0 0 0
100 0 0 1 0 0 0 0 0 0 0 1
>100 0 0 0 0 1,5 0 0 0 0 0 1,5
Pada pengujian mode gerak translasi rotasi hasil gerakan dari kamera sesuai dengan
perhitungan gerak translasi rotasi (3.1.2.2.) namun pada pengujian dengan jarak 100 cm
dan >100 cm terdapat sudut akhir yang meleset, hal ini dikarenakan adanya
permasalahan pada hardware yaitu pulley pada dudukan kamera yang terhenti sejenak
(selip). Sehingga pada pengujian ini keberhasilan dan ketidak berhasilan bisa saja terjadi
pada masukan jarak berapapun dan masukan waktu berapapun. Selisih maksimum yang
dihasilkan adalah 1° untuk masukan jarak 100 cm dan 1,5° untuk masukan jarak >100
cm.
4.2. Smartphone Android
Pada sub-bab ini akan dilakukan pengujian terhadap aplikasi user interface yang
telah dibuat. Selain pengujian terhadap aplikasi, pengujian pada jangkauan kerja kendali
smartphone android menggunakan Bluetooth.
4.2.1. Pengujian Aplikasi User Interface
Metode pengujian yang digunakan pada aplikasi user interface ini adalah
mengirimkan data sesuai dengan masukan dari mode dan masukan waktu yang ada di
aplikasi user interface sebanyak 10 kali pengujian dengan masukan data yang berbeda-
beda.
Kriteria keberhasilan dari pengujian aplikasi user interface ini adalah ketika
masukan data yang dikirimkan ke Arduino sesuai dengan masukan dari aplikasi pada
smartphone android. Berikut adalah data hasil pengujian dari aplikasi user interface:
4.2.1.1. Pengujian Menu Mode Utama
Pengujian mode utama dilakukan dengan memasukkan data menu “MANUAL”
dan “AUTO” yang kemudian datanya dikirimkan ke Arduino dan menampilkan
tampilan pemilihan mode gerakan beserta hasil masukan data yang diterima oleh
Arduino. Berikut adalah gambar dari pengujian mode utama:

Gambar 4.5. Pengujian Mode Utama
Tabel 4.6. Hasil Pengujian Mode Utama
No Masukan Mode Utama Hasil Pengujian
1 Manual Sesuai
2 Manual Sesuai
3 Auto Sesuai
4 Manual Sesuai
5 Auto Sesuai
6 Auto Sesuai
7 Manual Sesuai
8 Auto Sesuai
9 Manual Sesuai
10 Auto Sesuai

4.2.1.2. Pengujian Menu Mode Gerakan
Pengujian mode gerakan dilakukan dengan memasukkan data menu “Translasi”,
“Rotasi” dan “Translasi Rotasi” yang kemudian datanya dikirimkan ke Arduino dan
menampilkan tampilan masukan waktu beserta hasil masukan data yang diterima oleh
Arduino. Berikut adalah gambar dari pengujian mode gerakan:
Gambar 4.6. Pengujian Mode Gerakan

Tabel 4.7. Hasil Pengujian Mode Gerakan
No Masukan Mode Gerakan Hasil Pengujian
1 Rotasi Sesuai
2 Rotasi Sesuai
3 Translasi Rotasi Sesuai
4 Translasi Sesuai
5 Translasi Rotasi Sesuai
6 Rotasi Sesuai
7 Translasi Sesuai
8 Rotasi Sesuai
9 Translasi Rotasi Sesuai
10 Translasi Sesuai
4.2.1.3. Pengujian Menu Masukan Waktu
Pengujian menu masukan waktu dilakukan dengan memasukkan data menu masukan
waktu yang bervariasi, kemudian datanya dikirimkan ke Arduino dan menampilkan
tampilan start beserta hasil masukan data yang diterima oleh Arduino. Berikut adalah
gambar dari pengujian menu masukan waktu:

Gambar 4.7. Masukan Waktu Gambar 4.8. Pengujian Masukan Waktu
Tabel 4.8. Hasil Pengujian Masukan Waktu
No Masukan Waktu (s) Hasil Pengujian
1 3750 Sesuai
2 300 Sesuai
3 600 Sesuai
4 2400 Sesuai
5 30 Sesuai
6 900 Sesuai
7 1200 Sesuai
8 7200 Sesuai
9 6000 Sesuai
10 6600 Sesuai

4.2.1.4. Pengujian Menu Start dan Reset
Pengujian menu start dan reset dilakukan dengan memasukkan data menu “Start”
yang kemudian datanya dikirimkan ke Arduino untuk menampilkan data kecepatan
beserta jarak tempuh dan juga hasil masukan data yang diterima oleh Arduino.
Memasukkan menu “Reset” setelah slider berhenti bekerja yang kemudian datanya juga
dikirimkan ke Arduino. Berikut adalah gambar dari pengujian menu start dan reset:
Gambar 4.9. Pengujian Menu Start Gambar 4.10. Pengujian Menu Reset

Tabel 4.9. Hasil Pengujian Menu Start dan Reset
No Masukan Menu Start Hasil Pengujian
1 Start Sesuai
2 Reset Tidak Sesuai
3 Start Sesuai
4 Start Sesuai
5 Reset Sesuai
6 Reset Sesuai
7 Reset Sesuai
8 Start Sesuai
9 Reset Sesuai
10 Start Sesuai
4.2.1.5. Pengujian Menu Mode Pengambilan Gambar
Pengujian mode pengambilan gambar dilakukan dengan memasukkan data menu
“Sunset”, “Sunrise” dan “Panorama” yang kemudian datanya dikirimkan ke Arduino
dan menampilkan tampilan start beserta info panduan bagi pengguna dan juga hasil
masukan data yang diterima oleh Arduino. Berikut adalah gambar dari pengujian mode
gerakan:
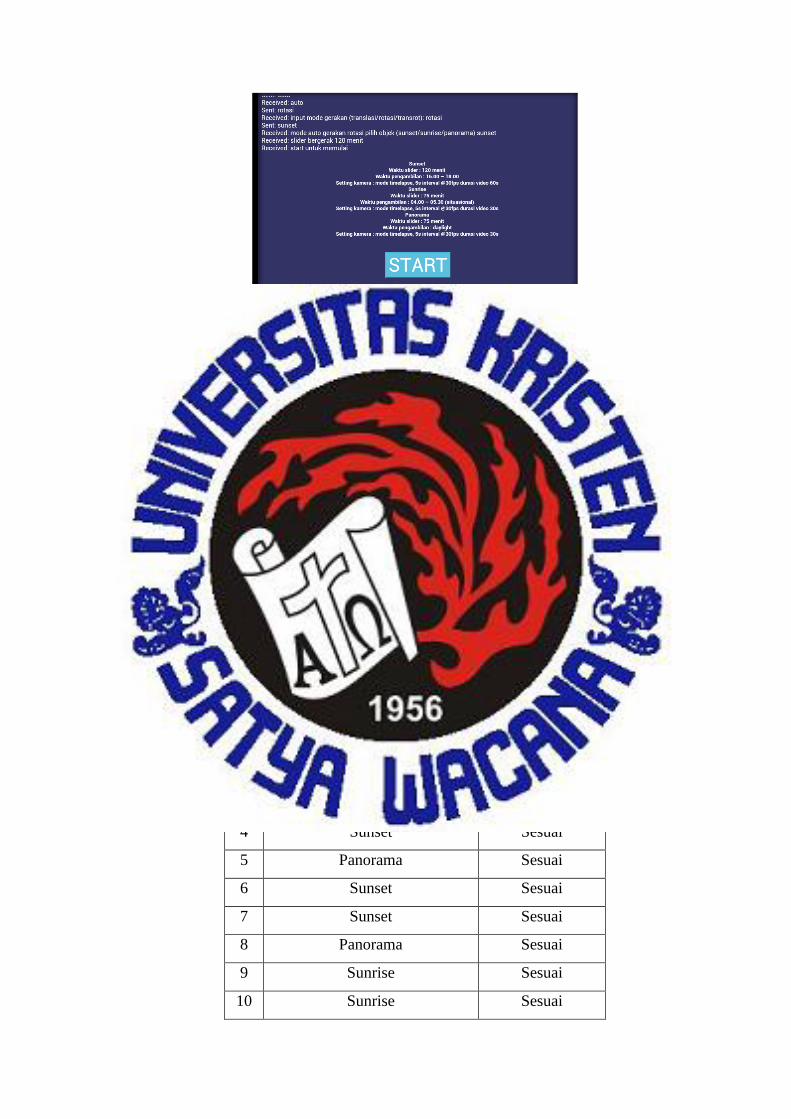
Gambar 4.11. Pengujian Mode Pengambilan Gambar
Tabel 4.10. Hasil Pengujian Mode Pengambilan Gambar
No Masukan Mode
Pengambilan Gambar
Hasil Pengujian
1 Sunset Sesuai
2 Sunrise Sesuai
3 Panorama Sesuai
4 Sunset Sesuai
5 Panorama Sesuai
6 Sunset Sesuai
7 Sunset Sesuai
8 Panorama Sesuai
9 Sunrise Sesuai
10 Sunrise Sesuai

Pada hasil pengujian di atas terdapat satu masukan menu reset yang tidak sesuai,
hal ini disebabkan oleh data telah dikirim oleh aplikasi pada smartphone android namun
data tidak diterima oleh Arduino. Sehingga untuk mengirim reset, pilihan menu reset
harus dikirim ulang.
4.2.2. Pengujian Jangkauan Kerja Kendali Bluetooth
Metode pengujian yang digunakan pada jangkauan kerja kendali Bluetooth ini
adalah smartphone android mengirimkan masukan ke slider timelapse dengan jarak
jangkauan tertentu, masing-masing 3 kali percobaan.
Kriteria keberhasilan dari pengujian ini adalah smartphone android dapat
mengirimkan masukan ke slider timelapse dengan baik pada jangkauan kurang lebih 10
meter.
Gambar 4.12. Pengujian Kerja Kendali Bluetooth

Tabel 4.11. Hasil Pengujian Kerja Kendali Bluetooth
NO Jarak (m) Pengujian 1 Pengujian 2 Pengujian 3
1 2 Berhasil Berhasil Berhasil
2 5 Berhasil Berhasil Berhasil
3 8 Berhasil Berhasil Berhasil
4 10 Berhasil Berhasil Berhasil
5 12 Berhasil Berhasil Berhasil
Pada data di atas semua pengujian yang dilakukan berhasil, pengujian dilakukan di
dalam Lab. Skripsi dengan jarak hitungan menggunakan eternit berukuran panjang 2
meter.