bab ii tinjauan pustaka -...
TRANSCRIPT

BAB II
TINJAUAN PUSTAKA
2.1. Umum
Teknologi laut dalam (deepsea technology) di masa sekarang adalah teknologi
terbaru dalam industri lepas pantai. Penemuan-penemuan baru sumber minyak dan
gas alam di laut dalam telah menghadirkan tantangan-tantangan besar industri, yang
menghasilkan suatu perubahan besar pada perkembangan konstruksi anjungan lepas
pantai sebagai sarana eksplorasi minyak dan gas alam, termasuk di dalamnya
peralatan, prosedur, instrumentasi, dan operasinya.
Secara garis besar, menurut Soedjono (1998) konstruksi anjungan lepas pantai dapat
dibedakan menjadi 3 golongan utama, yaitu :
• Anjungan terapung (Mobile Offshore Drilling Unit/MODU atau Floating
Production Platform) seperti : semi submersible, drilling ship, tension leg
platform,jack-up, FPSO, dll.
• Anjungan terpancang (Fixed Offshore Platform), seperti : jacket platform,
concrete gravity, tripod,dll.
• Anjungan struktur lentur (Compliant Platform), seperti : Articulated Tower,
Guyed tower,dll.
Menurut Arifin (2000) dalam merancang bangunan lepas pantai pertimbangan
penting yang digunakan adalah biaya investasi, perilaku hidrodinamis, kemampuan
mobilitas, serta reliability dalam pengoperasiannya.
Pemilihan konsep struktur merupakan tahapan awal yang sangat penting bagi
keberhasilan struktur anjungan dalam menjalani fungsinya (Rosyid, 1996). Pada
perairan tertentu sumber minyak dan gas alam biasanya mempunyai volume antara
kecil hingga sedang dan berada pada lokasi yang berpencar. Sehingga pengoperasian
anjungan terpancang (fixed platform) menjadi tidak ekonomis lagi. Oleh karena itu
pemilihan anjungan terapung (floating platform) adalah hal yang paling tepat.
5

Anjungan terapung merupakan anjungan yang mempunyai karakter bergerak
mengikuti gerakan gelombang. Seringkali anjungan tipe ini dihubungkan dengan
dasar laut menggunakan peralatan mekanik seperti kabel atau rantai (mooring).
Untuk anjungan tipe ini yang utama adalah mobilitas dan kemampuannya
mengantisipasi gerakan akibat gelombang dan arus laut (Djatmiko, 2003).
Salah satu jenis anjungan terapung adalah FPSO. Menurut Aryawan (2005)
pemilihan jenis FPSO didasarkan pada kemudahannya dalam berpindah tempat,
sehingga sangat menguntungkan secara ekonomis bila ditempatkan pada daerah
marjinal. FPSO ini terdiri dari sebuah struktur pengapung berbentuk kapal (bangunan
baru atau dari modifikasi kapal tanker yang dialihfungsikan) yang secara permanen
ditambatkan ditempatnya beroperasi. Konfigurasi sistem tambatnya bisa berupa jenis
tambat menyebar (spread mooring type) dan sistem tambat titik tunggal (single point
mooring).
Pengetahuan tentang perilaku struktur terapung (floating structures) termasuk FPSO
pada laut lepas adalah persyaratan dasar dalam pengembangan teknologi laut dalam
yang berkelanjutan. Setiap tipe platform mempunyai karakteristik masing-masing.
Karakteristik gerakan pada FPSO misalnya berbeda dengan karakteristik gerakan
Tension Leg Platform (TLP) atau SPAR. Di sisi lain, laut lepas memiliki
karakteristik lingkungan sendiri. Karena itu pengetahuan tentang perkiraan respon
sebuah struktur pada suatu lingkungan tertentu sangatlah penting. Menurut Yilmaz
dan Incecik (1994), dengan menghitung beban-beban lingkungan secara
komprehensif akan diketahui respon dinamis FPSO.
Pada umumnya respon kapal, mooring lines dan riser tidak dapat dipisahkan satu
sama lain. Offset pada FPSO dipengaruhi oleh sistem mooring dan riser, sedangkan
offset mooring tergantung pada karakteristik motion FPSO yang bisa berubah-ubah
disebabkan oleh gaya pengembali (restoring force) dan gaya redaman (drag force)
sistem mooring dan riser. Yang harus menjadi catatan bahwa offset pada FPSO
cukup sensitif terhadap nilai redaman mooring dan riser. Nilai redaman tergantung
pada amplitudo dan frekuensi gerakan FPSO. Respon mooring dan riser sebagian
6
besar non-linier dengan frekuensi natural dan tidak sama dengan rentang frekuensi
gerakan FPSO (Aryawan, 2005).
Salah satu tujuan perhitungan respon dinamis struktur adalah untuk mendapatkan
respon ekstrem dari sistem (gerakan ekstrem, offset mooring ekstrem, tension riser
ekstrem). Cara tradisional untuk melakukan analisa adalah dengan menganalisa
respon struktur untuk satu desain data lingkungan misalnya gelombang signifikan
100 tahun, kecepatan angin 100 tahun dan arus 100 tahun.
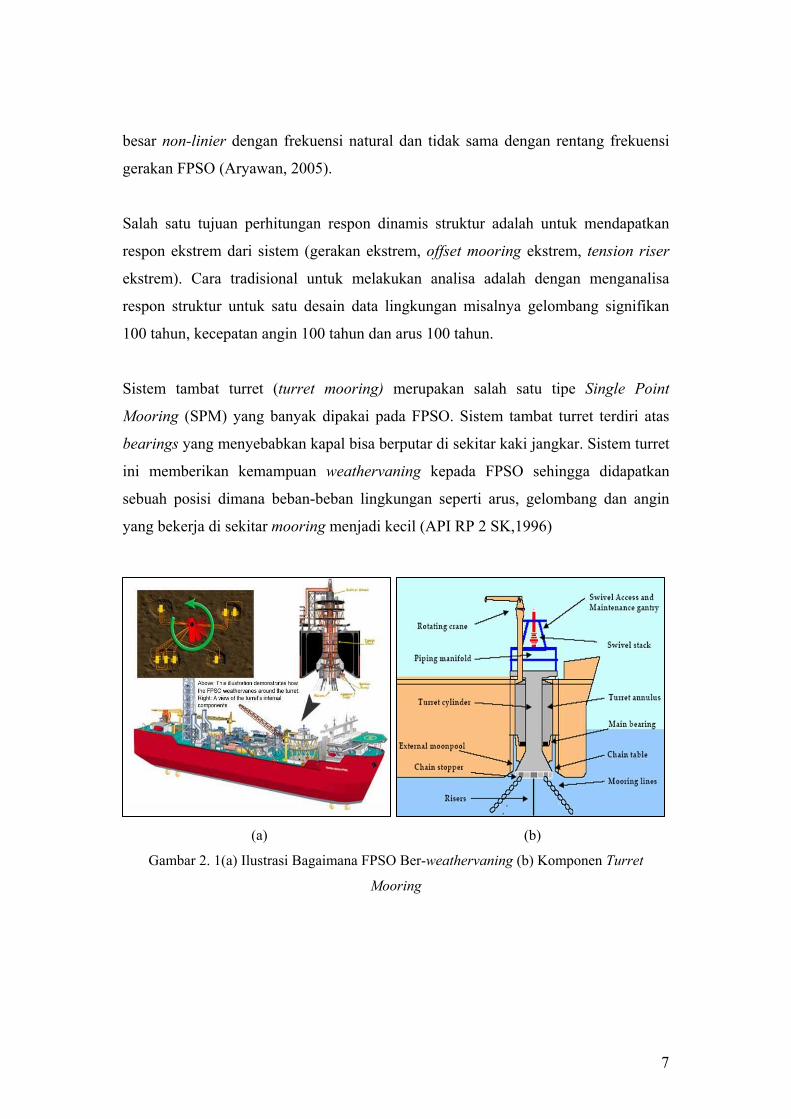
Sistem tambat turret (turret mooring) merupakan salah satu tipe Single Point
Mooring (SPM) yang banyak dipakai pada FPSO. Sistem tambat turret terdiri atas
bearings yang menyebabkan kapal bisa berputar di sekitar kaki jangkar. Sistem turret
ini memberikan kemampuan weathervaning kepada FPSO sehingga didapatkan
sebuah posisi dimana beban-beban lingkungan seperti arus, gelombang dan angin
yang bekerja di sekitar mooring menjadi kecil (API RP 2 SK,1996)
(a) (b)
Gambar 2. 1(a) Ilustrasi Bagaimana FPSO Ber-weathervaning (b) Komponen Turret
Mooring
7

2.2. Konsep Pembebanan
Pada suatu proses perancangan bangunan lepas pantai, untuk menentukan
kemampuan kerja suatu struktur akan dipengaruhi oleh beban yang terjadi pada
bangunan tersebut. Sehingga perancang harus menentukan akurasi atau ketepatan
beban yang akan diterapkan dalam perancangan. Menurut Soedjono (1999) beban-
baban yang harus dipertimbangkan dalam perancangan bangunan lepas pantai adalah
sebagai berikut :
1. Beban mati (Dead Load)
Beban mati (dead load) adalah beban dari komponen-komponan kering serta beban-
beban peralatan, perlengkapan dan permesinan yang tidak berubah dari mode operasi
pada suatu struktur, meliputi : berat struktur, berat peralatan dari permesinan yang
tidak digunakan untuk pengeboran atau proses pengeboran..
2. Beban hidup (Live Load)
Beban hidup adalah beban yang terjadi pada bangunan lepas pantai selama
beroperasi dan bisa berubah dari mode operasi satu ke mode operasi yang lain.
3. Beban akibat kecelakaan (Accidental Load)
Beban kecelakaan merupakan beban yang tidak dapat diduga sebelumnya yang
terjadi pada suatu bangunan lepas pantai, misalnya tabrakan dengan kapal pemandu
operasi, putusnya tali tambat, kebakaran, letusan.
4. Beban lingkungan (Environmetal Load)
Beban lingkungan adalah beban yang terjadi karena dipengaruhi oleh lingkungan
dimana suatu bangunan lepas pantai dioperasikan atau bekerja. Beban lingkungan
yang biasanya digunakan dalam perancangan adalah :
1. Wave Drift Force
2. Beban angin
3. Beban arus
2.2.1 Wave Drift Force Menurut Indiyono (2003) beban gelombang merupakan beban terbesar yang
ditimbulkan oleh beban lingkungan pada bangunan lepas pantai (offshore structure).
Perhitungan beban gelombang dapat direpresentasikan dengan perhitungan gaya
8

gelombang. Teori perhitungan gaya gelombang yang tepat untuk analisa mooring
pada FPSO adalah teori difraksi. Dalam teori ini bilamana suatu struktur mempunyai
ukuran yang relatif besar, yakni memiliki ukuran yang kurang lebih sama dengan
panjang gelombang, maka keberadaan struktur ini akan mempengaruhi timbulnya
perubahan arah pada medan gelombang disekitarnya. Dalam hal ini difraksi
gelombang dari permukaan struktur harus diperhitungkan dalam evaluasi gaya
gelombang.
Untuk gaya gelombang time series dapat dibangkitkan dari spektrum gelombang.
Gaya gelombang first order :
( ) ( ) ( ) ( ) [ ] iii
N
iiwvwv aFtF εωω += ∑
=
cos1
11 .................................................(2.1)
dimana : ( ) ( )tFwv1 = gaya gelombang first order tergantung waktu
( ) ( )ω1wvF = gaya exciting gelombang first order per unit amplitudo gelombang
tergantung waktu
iε = sudut fase komponen gelombang first order
ia = amplitudo komponen gelombang first order ( ) ωω dS2
( )ωS = fungsi kepadatan spektra gelombang
Gaya gelombang second order :
( ) ( ) [ )()(cos11
1jiji
N
jijji
N
iwv tDaatF εεωω −+−= ∑∑
==
] ..........................(2.2)
dimana :
ijD = drift force per unit amplitudo gelombang
2.2.2 Beban Angin Beban angin merupakan beban dinamis, tapi beberapa struktur akan meresponnya
pada model statis yang paling mendekati. Dalam perancangan bangunan lepas pantai
pada umumnya perhitungan beban angin disyaratkan untuk didasarkan pada besarnya
9

kecepatan ekstrim dengan periode ulang 50 atau 100 tahun. Semakin lama periode
ulang yang digunakan, maka resiko kegagalan semakin besar. Sedangkan formula
untuk gaya angin time series dapat dibangkitkan dari spektrum gelombang menurut
API RP 2 T adalah memakai rumus sebagai berikut :
( ) ( xVxVxACtF CCaSaWD && −−= ρ21 ) ...............................................(2.3)
dimana:
Fw = gaya angin (N)
CS = koefisien bentuk
aρ = massa jenis udara (kg/ m3)
x& = kecepatan dari platform (m/s)
ax = aerodinamic amittance
A = luas area vertikal yang terkena angin (m2)
VC = kecepatan partikel air (m/s)
Sedangkan kecepatan angin dirumuskan sebagai berikut : x
WyVV ⎟
⎠
⎞⎜⎝
⎛=1010 ..........................................................................................(2.4)
dimana :
Vw = kecepatan angin, knots (m/s)
V10 = kecepatan angin pada ketinggian 10 m, knots (m/s)
y = ketinggian dimana kecepatan angin dihitung, (m)
x = faktor eksponen
Bila informasi yang akurat tidak tersedia, maka harga eksponensial x sebesar 71
dapat diambil sebagai pendekatan. Harga ini cukup sesuai untuk ketinggian sampai
dengan sekitar 200 m. Untuk semua sudut dari pendekatan beban angin pada
struktur, gaya pada permukaan datar diasumsikan sebagai gaya normal pada
permukaan dan gaya pada tanki silinder vertikal, pipa, dan silinder lain diasumsikan
searah dengan arah angin, sedangkan yang tidak vertikal dapat dihitung
10

menggunakan formula yang diambil dari perhitungan arah angin berhubungan
dengan gerak objek.
2.2.3 Beban Arus Selain gelombang, arus laut juga memberikan gaya terhadap struktur bangunan lepas
pantai. Arus akibat pasang surut memiliki kecepatan yang semakin berkurang seiring
dengan bertambahnya kedalaman sesuai fungsi non-linier. Sedangkan arus yang
disebabkan oleh angin memiliki karakter yang sama, tetapi dalam fungsi linier.
Kecepatan arus tersebut dirumuskan dalam formulasi matematis berikut :
UT = UOT (y/h)1/7 ..................................................................................(2.5a)
UW = UOW (y/h) ..................................................................................(2.5b)
dimana :
UT : kecepatan arus pasang surut (m/detik)
UOT : kecepatan arus pasang surut di permukaan (m/detik)
UW : kecepatan arus akibat angin (m/detik)
UOW : kecepatan arus akibat angin di permukaan (m/detik)
y : jarak dari dasar laut (meter)
h : kedalaman laut (meter)
Gaya arus yang bekerja pada struktur dapat dirumuskan sebagai berikut :
Fcx = Ccx S V2c ...................................................................................(2.6a)
Fcy = Ccy S V2c ...................................................................................(2.6b)
Dimana :
Fcx : Gaya arus pada bow
Fcy : Gaya arus pada beam
Ccx : Koefisient gaya arus pada bow
= 0.016 lb/ft2 (2.89 Nsec2/m4)
Ccy : Koefisient gaya arus pada bow
= 0.4 lb/ft2 (72.37 Nsec2/m4)
S : Luas penampang pada lambung kapal yang terendam (m2)
Vc : Kecepatan arus desain (m/sec)
11

2.3. Teori Gerak Kapal Akibat Eksitasi Gelombang
Pada dasarnya benda yang mengapung mempunyai 6 mode gerakan bebas yang
terbagi menjadi dua kelompok, yaitu 3 mode gerakan translasional dan 3 mode
gerakan rotasional. Berikut adalah keenam mode gerakan tersebut :
1. Mode gerak translasional
Surge, gerakan transversal arah sumbu x
Sway, gerakan transversal arah sumbu y
Heave, gerakan transversal arah sumbu z
2. Mode gerak rotasional
Roll, gerakan rotasional arah sumbu x
Pitch, gerakan rotasional arah sumbu y
Yaw, gerakan rotasional arah sumbu z
Definisi gerakan kapal dalam enam derajat kebebasan dapat dijelaskan dengan
gambar 2.2. Dengan memakai konversi sumbu tangan kanan tiga gerakan translasi
pada arah sumbu x,y dan z, adalah masing-masing surge (ζ1), sway (ζ2) dan heave
(ζ3), sedangkan untuk gerakan rotasi terhadap ketiga sumbu adalah roll (ζ4), pitch (ζ5)
dan yaw (ζ6).
Gambar 2. 2 Tanda Untuk Displacement Gerakan Translasi dan Rotasi
Dengan asumsi bahwa gerakan-gerakan osilasi tersebut adalah linier dan harmonik,
maka enam persamaan diferensial gerakan kopel dapat dituliskan sebagai berikut :
G
x
y
z
O Xo
Yo
Zo
ζx
ζyζz
ζθ
ζφ
ζψ
12

( )[ ] 1,6
1==+++∑
=
jeFCBAM iwtj
nkjkkjkkjkjk ξξξ ............(2.7)
dimana :
Mjk = komponen matriks massa kapal
Ajk, BBjk = matriks koefisien massa tambah dan redaman
Cjk = koefisien-koefisien gaya hidrostatik pengembali
Fj = amplitudo gaya eksitasi dalam besaran kompleks
F1, F2 dan F3 adalah amplitudo gaya-gaya eksitasi yang mengakibatkan surge, sway
dan heave, sedangkan F4, F5 dan F6 adalah amplitudo momen eksitasi untuk roll,
pitch dan yaw. Tanda titik menunjukkan turunan terhadap waktu, sehingga ζ dan ζ
adalah masing-masing kecepatan dan percepatan.
Bila diasumsikan bahwa kapal mempunyai bentuk simetris terhadap bidang tegak O-
XZ dan titik beratnya tertetak pada koordinat (0,0,Zc) maka matriks massa secara
umum adalah :
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−
=
646
5
464
00000000
0000000000000000
IIIMZ
IIMZM
MZMMZM
M
c
c
c
c
jk ….....……(2.8)
dimana M adalah massa kapal, Ij adalah momen inersia massa pada mode ke j, dan Ijk
adalah produk momen inersia massa. Dengan asumsi yang sama, matriks yang
memuat koefisien-koefisien added mass dan damping adalah :
13

( )
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
666462
555351
464442
353331
262422
151311
000000
000000
000000
AAAAAA
AAAAAA
AAAAAA
atauBA jkjk .........……........…..(2.9)
Selanjutnya, untuk kapal yang terapung di permukaan bebas, koefisien-koefisien
hidrostatik pengembali yang tidak sama dengan nol adalah :
C33, C44, C55 dan C35 = C53 ..…………………………...........…(2.10)
Bila matriks massa, koefisien added mass dan damping, dan koefisien pengembali
dimasukkan ke persamaan gerak, maka untuk kapal yang simetris dalam arah lateral,
enam persamaan gerak kopel akan dapat dipisahkan menjadi dua bagian, yaitu
bagian pertama adalah persamaan kopel untuk surge, heave, dan pitch serta bagian
kedua adalah persamaan kopel untuk sway, roll, dan yaw. Jadi untuk kapal dengan
bentuk simetris, tidak akan terjadi kopel antara surge, heave, dan pitch dengan sway,
roll dan yaw.
Prosedur komputasi untuk menyelesaikan persamaan gerak kapal, pertama akan
dihitung besarnya gaya-gaya eksitasi. Hal ini dapat diturunkan dengan menghitung
distribusi tekanan hidrodinamik dengan persamaan Bernoulli, yaitu
⎟⎠⎞
⎜⎝⎛ +∇+
∂∂
−= gzt
p 2
21 φφρ ....................................................(2.11)
dimana potensial kecepatan φ adalah :
( ) ( )[ ] ( ) iwtTsx ezyxzyxUtzyx ,,,,,,, φφφ ++−= ........(2.12)
Dalam persamaan (2.12), variabel pertama dalam ruas kanan adalah merupakan
kontribusi dari potensial kecepatan steady, φs , dan kecepatan kapal U. Sedangkan
variabel kedua adalah kontribusi dari potensial kecepatan unsteady :
14

∑=
++=6
1jjjDTT h φφφφ .......................................................(2.13)
dimana φI , φD dan φj masing-masing adalah potensial kecepatan dari gelombang
insiden, difraksi dan radiasi sebagai akibat mode gerakan ke j.
Langkah berikutnya dalam menyelesaikan persamaan gerak adalah menentukan
harga koefisien-koefisien added mass, damping dan hydrostatic. Dari persamaan
gerak ini didapatkan hasil berupa karakteristik gerakan kapal. Informasi ini pada
umumnya disajikan dalam bentuk grafik, di mana perbandingan gerakan pada mode
tertentu ζj dengan parameter tinggi (atau amplitudo gelombang, ζa) diberikan sebagai
fungsi frekuensi encounter ωe dari sumber eksitasi. Informasi gerakan ini dinamakan
Response Amplitudo Operator (RAO).
2.4. Gerak Kapal di Atas Gelombang Acak
Gerakan kapal di atas gelombang acak dapat dilakukan dengan mentransformasikan
spektrum gelombang menjadi spektrum gerakan kapal. Hal ini dapat dilakukan
dengan memperkalikan harga pangkat dua dari response amplitude operator (RAO)
dan mode gerakan tertentu dengan ordinat spektrum gelombang, pada frekuensi yang
sama. Pendekatan yang diusulkan oleh Denis dan Pierson (1953) ini valid bila harga
RAO adalah merupakan normalisasi amplitudo gerakan dengan amplitudo
gelombang.
Spektrum gerak kapal merupakan hasil perkalian antara RAO dengan spektrum
gelombang. Untuk kapal yang berkecepatan U maka persamaan spektrum
gerakannya (contoh untuk heave) adalah :
( )2
2
11 ⎟⎟
⎠
⎞⎜⎜⎝
⎛=
ξξ
ωξξ SS .............................................................................(2.14)
15

Perlu digarisbawahi bahwa dalam hal ini untuk kapal yang bergerak, frekuensi
gelombang yang dialami oleh kapal akan berbeda dengan frekuensi gelombang
sebenarnya yang datang. Fenomena ini terjadi karena adanya gerakan relatif dari
kapal yang mempunyai kecepatan dengan progresi gelombang. Frekuensi relatif ini
diistilahkan sebagai frekuensi papasan (encounter frekuensi, ωe). Hubungan antara
ωe, kecepatan kapal, U, dan frekuensi gelombang insiden, ω, arah kapal relatif
terhadap gelombang, μ, adalah :
⎟⎟⎠
⎞⎜⎜⎝
⎛−= μωωω cos10 g
U rad/detik ...................................................(2.15)
Diferensiasi persamaan (3.15) terhadap ω dapat ditulis sebagai :
μωω
ωcos210
gU
dd
−= rad/detik ......................................................(2.16)
sehingga hubungan antara interval frekuensi menjadi :
δωμωδω ⎟⎟⎠
⎞⎜⎜⎝
⎛−= cos210 g
U .................................................................(2.17)
Dengan mengikuti proses ini, maka spektrum gelombang papasan mempunyai
hubungan dengan spektrum gelombang insiden sebagai berikut :
( ) ( ) 00 δωωδωω ξξ SS = ........................................................................(2.18)
atau :
( ) ( )ωμω
ω ξξ SUggS
cos20 −= ..........................................................(2.19)
Seperti disinggung sebelumnya, spektrum gerak kapal merupakan hasil perkalian
antara RAO dengan spektrum gelombang. Untuk kapal yang berkecepatan U maka
persamaan spektrum gerakannya (contoh untuk heave) adalah :
( )2
0
101 ⎟⎟
⎠
⎞⎜⎜⎝
⎛=
ξξ
ωξξ SS ..............................................................................(2.20)
16
Dalam analisa gerakan kapal di atas gelombang acak, setelah spektrum gerakan
diperoleh dengan prosedur di atas, maka besaran-besaran seperti amplitudo
signifikan gerakan, kecepatan dan percepatan dapat ditentukan dengan menghitung
momen-momen spektrum.
Dalam perancangan kapal seringkali diperlukan informasi kondisi ekstrim yang akan
terjadi bila kapal berjalan di atas gelombang. Untuk masalah ini, Ochi (1973) telah
memperkenalkan formulasi stokastik harga ekstrim. Untuk kapal yang bergerak di
atas gelombang yang mempunyai karakteristik tertentu (spektrumnya tetap), maka
gerakan terbesar yang paling mungkin terjadi dapat dirumuskan sebagai berikut :
0
21
0
22
260ln2 m
mmT
n⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛=
πξ .......…….…………….....………....(2.21)
Dimana n adalah jumlah observasi depresi gerakan. Harga n dapat dihitung dengan
mempertimbangkan lamanya (waktu) kapal di atas gelombang tersebut (misalnya T
jam).
Bila diinginkan untuk menghitung harga ekstrim dengan faktor keselamatan tertentu,
maka prosedur berikut harus diikuti. Sebagai contoh, bila diinginkan untuk
menghitung harga ekstrim di mana kemungkinan terjadinya hanya 1% (tingkat
keyakinannya terlampaui adalah 99%). Harga 1 % tersebut dinamakan ekstrim
kemudiàn dinamakan faktor keselamatan (α = 0,01). Harga ekstrim kemudian dapat
dihitung dengan memasukkan faktor α ke dalam persamaan :
0
21
0
22
260ln2 m
mmT
n⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛=
παξ ..........................................................(2.22)
17

2.5. Periode Alami Gerakan Bangunan Apung
2.5.1 Gerakan harmonik Gerakan osilasi adalah gerakan berulang, baik secara beraturan atau tidak beraturan.
Apabila gerakan osilasi terjadi secara berulang dengan interfal waktu yang tetap
(periode = T) maka dinamakan gerakan periodik. Syarat gerakan periodik adalah :
f = 1/T
)()( Ttxtx += .............................................................................(2.23)
Dimana : f = frekuensi gerakan periodik
T = Periode gerakan periodik
Gerakan periodik yang paling sederhana adalah gerakan harmonik. Contohnya yaitu
gerakan pegas yang digantung sebuah masaa m (gambar 3.3).
Gambar 2. 3 Gerakan Harmonik Massa Digantung pada Pegas
Frekuensi angular gerakan harmonik adalah : ω = 2πf sedangkan persamaan
simpangan gerakan harmonik adalah :
TtAtAx πω 2sinsin == ..............................................................(2.24)
Persamaan kecepatan dan percepatan gerakan harmonik adalah :
)2
sin(cos πωωωω +=== tAtAdtdxx& ...........................................(2.25a)
)sin(sin 222
2
πωωωω +−=−== tAtAdt
xdx&& .....................................(2.25b)
18

Kecepatan dan percepatan mempunyai sudut fase yang mendahului simpangan,
masing-masing π/2 rad dan π rad. Jika persamaan (2.25b) disubstitusikan ke
persamaan (2.24) akan didapat persamaan berikut :
xx 2ω−=&& ........................................................................................(2.26)
Dimana :
ω = ωn (getaran bebas)
2.5.2 Getaran bebas Model getaran bebas dapat ditunjukkan dengan sistem yang terdiri dari massa m dan
pegas (tanpa massa) :
Gambar 2. 4 Sistem Getaran Bebas
Hubungan gaya-gaya defleksi pada pegas yang linear (memenuhi hukum Hooke) :
F = kx ................................................................................................(2.27)
Dimana : F = Gaya (kN)
k = kekakuan (N/m)
x = displacement/offset (m)
Persamaan kesetimbangan gaya untuk simpangan x :
∑ +Δ−== )( xkwFxm && ...........................................................(2.28)
k(Δ + x)
x& x&&
m m
m
Posisi kesetimbangan statis
x
kΔ
Δ k
w
w
Posisi awal tanpa massa
19

karena kΔ = w = mg, maka :
kxxm −=&& ........................................................................................(2.29)
atau persamaan linear orde 2 untuk gerakan bebas :
0=+ kxxm && ...................................................................................(2.30a)
0=+ xmkx&& .................................................................................(2.30b)
Dari persamaan (2.26) dan (2.30b) diperoleh hubungan :
mk
n =2ω maka mk
n =ω .............................................................(2.31)
2.5.3 Periode Alami Bangunan Apung
Gambar 2. 5 Analisa Periode Bangunan Apung
Bila bangunan apung ditekan ke bawah dengan simpangan z maka akan timbul gaya
pengembali dari air. Dan bila bangunan apung diangkat sejauh z maka berat benda
akan menjadi lebih besar dari gaya apung sebesar ρ g Aw z. Massa sistem gerakan
terdiri atas massa benda (m) dan massa fluida yang mengalami percepatan akibat
gerakan benda (mA /massa tambah). Persamaan gerakan bebas benda apung adalah :
( ) 0=++∇ gAwZZmA ρρ && ...........................................................(2.32a)
gAwk ρ= ....................................................................................(2.32b)
W1
Aw
m
W0
z
x
L1
L0
20
Periode alamiah gerakan heave
A
wnZ m
gAmk
+∇==
ρρ
ω .....................................................................(2.33)
T = 2π /ω maka :
w
AnZ gA
mkmT
ρρ
ππ+∇
== 22 ............................................................(2.34)
Periode alamiah gerakan rolling
Dari teori stabilitas statis, benda apung yang dikenai gangguan dalam bentuk
kemiringan transversal dari posisi tegaknya maka benda apung tersebut akan
mendapatkan momen pengembali sebesar TGMg∇ρ . Untuk olengan dengan sudut
kecil maka lengan moment pengembali adalah :
φφ TTT GMGMGZ == sin ..........................................................(2.35)
Dengan analogi persamaan bebas vertikal (3.33), maka persamaan bebas rotasi
transversal (rolling) dapat ditulis sebagai berikut :
0)( =∇++ Δ φρφφφ TGMgII && .......................................................(2.36)
Iφ = momen inersia massa terhadap sumbu memanjang benda apung (o-x)
yang melalui titik berat
IφΔ = momen inersia massa tambah terhadap sumbu yang sama
Mengambil analogi (3.32b) merupakan gerak rolling adalah :
TGMgk ∇= ρ .................................................................................(2.37)
Sehingga periode alami gerakan rolling benda apung diperoleh sebagai berikut :
Tn
GMg
IIkmT
∇
+== Δ
ρππ φφ
φ 22 ..........................................................(2.38)
atau frekuaesi alami rolling adalah :
Δ+∇
==φφ
φρ
ππωII
GMgmk T
n 22 .......................................................(2.39)
21

Periode alamiah gerakan pitching
Sebagaimana halnya dengan rolling, persamaan gerak rotasi bebas pitching dapat
ditulis :
0)( =∇++ Δ θρθθθ LGMgII && .....................................................(2.40)
Iө + Iө∆ = momen inersia massa dan massa tambah benda apung terhadap
sumbu melintangnya melalui titik berat (o-y)
LGM = tinggi metasenter memanjang benda apung
Periode alami gerakan pitching adalah :
Ln
GMgII
T∇
+= Δ
ρπ θθ
θ 2 ......................................................................(2.41)
atau frekuensi alami gerakan pitching :
Δ+∇
=θθ
θρ
πωII
GMg Ln 2 ......................................................................(2.42)
2.6. Spektrum Gelombang
Pemilihan spektrum energi gelombang didasarkan pada kondisi real laut yang
ditinjau. Bila tidak ada maka dapat digunakan model spektrum yang dikeluarkan oleh
berbagai institusi dengan mempertimbangkan kesamaan fisik lingkungan. Dari
spektrum gelombang dapat diketahui parameter-parameter gelombang :
Tabel 2. 1 Amplitudo dan Tinggi Gelombang pada Spektrum
Profil Gelombang Amplitudo Tinggi
Gelombang rata-rata 025,1 m 05,2 m
Gelombang signifikan 000,2 m 000,4 m
Rata-rata 1/10 gelombang tertingi 055,2 m 000,5 m
Rata-rata 1/100 gelombang tertingi 044,3 m 067,6 m
22

Dimana : m0 = Luasan dibawah kurva spektrum (zero moment)
= .....................................................................................(2.43) ( ) ωω dS∫∞
0
Salah satu model spektral diajukan oleh Pierson Morkowitz (1964) dan masih secara
luas digunakan. Aplikasi umum dari satu parameter spektrum gelombang Pierson
Morkowitz dibatasi oleh fakta jika kondisi laut kadang dijangkau secara penuh
situasi dikembangkan. Pengembangan dari laut juga dibatasi oleh fetch. Secara luas
program pengukuran gelombang, diketahui sebagai Joint North Sea Wave Project
(JONSWAP) yang berasal dari laut utara. Dari analisa dan pengukuran data
JONSWAP spektrum diturunkan. Perumusan spektrum JONSWAP mewakili angin
dengan batasan fetch.
Spektrum gelombang yang dipakai dalam tugas akhir ini adalah spektrum
JONSWAP. Persamaan spektrum JONSWAP merupakan modifikasi dari persamaan
spektrum Pierson-Morkowitz yang disesuaikan dengan kondisi laut yang ada.
Persamaan spektrum JONSWAP dapat ditulis sebagai berikut :
( )( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−−
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−=
20
2
20
24
0
52 25,1 ωτ
ωω
γωωωαω
EXP
EXPgS ...............................(2.44)
Dimana :
γ = parameter puncak (peakedness parameter)
τ = parameter bentuk (shape parameter)
untuk 0ωω ≤ = 0,07 dan 0ωω ≥ = 0,09
α = 0,0076 (X0)-0,22, untuk X0 tidak diketahui α = 0,0081
( ) 33,000 2 −
⎟⎟⎠
⎞⎜⎜⎝
⎛= X
Ug
ω
πω ωUXgX =0
Sedang nilai dari parameter puncak )(γ dapat ditentukan dengan menggunakan
rumus sebagai berikut :
23
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛−−= 2
4
0056,0036,01975,014843,3S
P
S
P
HT
HT
EXPγ .............(2.45)
Dimana :
Tp = periode puncak spektra
Hs = tinggi gelombang signifikan
2.7. Response Amplitude Operators (RAO)
Respon pada struktur offshore (baik struktur fixed maupun terapung) akibat
gelombang reguler dalam tiap-tiap frekuensi, dapat diketahui dengan menggunakan
metode spectra. Nilai amplitudo pada suatu respon secara umum hampir sama
dengan amplitudo gelombang. Bentuk normal suatu respon dari sistem linier tidak
berbeda dengan bentuk amplitudo gelombang dalam fungsi frekuensi.
Response Amplitude Operator (RAO) atau sering disebut sebagai Transfer Function
adalah fungsi respon yang terjadi akibat gelombang dalam rentang frekuensi yang
mengenai struktur offshore. RAO disebut sebagai Transfer Function karena RAO
merupakan alat untuk mentransfer beban luar (gelombang) dalam bentuk respon pada
suatu struktur. Bentuk umum dari persamaan RAO dalam fungsi frekuensi
(Chakrabarty, 1987) adalah sebagai berikut :
Response (ω) = (RAO) η(ω) ..............................................................(2.46)
dimana, η = amplitudo gelombang, m, ft
2.8. Respon Struktur
Response Amplitude Operator (RAO) atau disebut juga dengan Transfer Function
merupakan fungsi respon gerakan dinamis struktur yang disebabkan akibat
gelombang dengan rentang frekuensi tertentu. RAO merupakan alat untuk
mentransfer gaya gelombang menjadi respon gerakan dinamis struktur. Menurut
Chakrabarti (1987), persamaan RAO dapat dicari dengan rumus sebagai berikut :
( ) ( )( )ωη
ωω pX
RAO = ...............................................................................(2.47a)
24

Dimana :
( )ωpX = amplitudo struktur
( )ωη = amplitudo gelombang
Sedangkan amplitudo struktur (respon struktur) dapat dirumuskan :
xp = )cos()2()1( 222
αωζ
−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+−t
rr
x
c
o ………………………………..(2.47b)
Dimana :
xo = kFo
r = nω
ω
tan α = 212
rr
−ζ
Spektrum respons didefinisikan sebagai respons kerapatan energi pada struktur
akibat gelombang. Spektrum respons merupakan perkalian antara spektrum
gelombang dengan RAO kuadrat, secara matematis dapat ditulis sebagai berikut :
( )[ ] ( )ωω SRAOS R2= .........................................................................(2.48)
Dimana :
= spektrum respons (mRS 2-sec)
( )ωS = spektrum gelombang (m2-sec)
( )ωRAO = transfer function
ω = ferkuensi gelombang (rad/sec)
25

2.9. Excursion
Excursion atau Offset adalah perpindahan posisi pada FPSO dengan jarak sejauh x
meter setelah terkena gelombang dan merupakan salah satu bentuk respon dari FPSO
pada saat mendapat beban lingkungan. Offset dapat dibedakan menjadi beberapa
kelompok, yaitu:
1. Mean offset
Displacement dari vessel karena kombinasi dari pengaruh beban arus, wave
drift rata-rata dan angin.
2. Maximum offset
Mean offset yang mendapat pengaruh dari kombinasi frekuensi gelombang dan
low-frequency motion.
Offset maksimum dapat ditentukan dengan prosedur di bawah ini:
1. , maka : wfmaxlfmax SS >
wfsiglfmaxmeanmax SSSS ++= .....................................................................(2.49a)
2. , maka : lfmaxwfmax SS >
lfsigwfmaxmeanmax SSSS ++= .......................................................................(2.49b)
dimana:
Smean = mean vessel offset
Smax = maximum vessel offset
Swfmax = maximum wave frequency motion
Swfsig = significant wave frequency motion
Slfmax = maximum low-frequency motion
Slfsig = significant low-frequency motion
Alternatif lain yang dapat digunakan dengan menggunakan time domain, frekuensi
domain, kombinasi keduanya atau model testing. Mean offset yang diijinkan adalah
2% sampai 4% dari kedalaman perairan sedangkan untuk maximum offset
dipengaruhi oleh banyak faktor seperti kedalaman perairan, lingkungan dan sistem
riser. Tetapi pada umumnya pada range 8% sampai 12% dari kedalaman perairan.
26

2.10. Tension pada Mooring Line
Gerakan pada FPSO karena pengaruh dari gerakan vessel dan pengaruh lingkungan
menyebabkan adanya tarikan pada mooring line. Tarikan (tension) yang terjadi pada
mooring line dapat dibedakan menjadi 2 yaitu :
1. Mean tension
Tension pada mooring line yang berkaitan dengan mean offset pada vessel.
2. Maximum tension.
Mean tension yang mendapat pengaruh dari kombinasi frekuensi gelombang dan
low-frequency tension.
3. Maximum tension dapat ditentukan dengan prosedur di bawah ini :
1. , maka: wfmaxlfmax TT >
wfsiglfmaxmeanmax TTTT ++= ………......………………......……………..(2.50a)
2. , maka: lfmaxwfmax TT >
lfsigwfmaxmeanmax TTTT ++= ….........………………………….....…….(2.50b)
dimana:
Tmean = mean tension
Tmax = maximum tension
Twfmax = maximum wave frequency tension
Twfsig = significant wave frequency tension
Tlfmax = maximum low-frequency tension
Tlfsig = significant low-frequency tension
2.11. Analisa Dinamis
Tujuan dari rangkaian analisa dinamis penelitian ini pertama adalah untuk
mendapatkan frekuensi natural struktur tanpa redaman dan kemudian mencari respon
struktur terhadap pembebanan dinamis yang dalam hal ini menggunakan beban
gelombang. Analisa dinamis FPSO dapat dilakukan dengan analisa domain waktu
(time domain) dan analisa domain frekuensi (frequency domain). Secara sederhana
kedua metode itu dapat digambarkan sebagai berikut :
27

Gambar 2. 6 Pendekatan untuk Analisa Dinamis Struktur
Metode time domain solution secara umum digunakan untuk tahap final detail desain
dan untuk mengecek penyelesain metode frequency domain. Metode time domain
biasanya digunakan untuk analisis kondisi ekstrim tetapi tidak digunakan untuk
analisis fatigue atau analisis kondisi lebih moderat dimana analisis linierisasi bekerja
lebih effisien.
Sejak integrasi numerik langsung persamaan motion dilakukan, pengaruh fungsi-
fungsi non-linier gelombang relevan dan variabel-variabel motion diikutkan.
Keuntungan dari metode time domain dibanding metode frequency domain adalah
semua tipe non-linier (matrik sistem dan beban-beban eksternal) dapat dimodelkan
dengan lebih tepat. Ketidakuntungannya adalah memerlukan waktu menghitung yang
lebih banyak, seperti periode simulasi memerlukan waktu panjang. Simulasi time
domain dapat dikerjakan menurut beberapa skema integrasi. Untuk dapat mewakili
kondisi sebenarnya simulasi minimal dilakukan selama 3 jam.
Pada analisa time domain umumnya keseimbangan dinamik dari multi degree of
freedom sistem dapat diformulasikan sebagai berikut :
28
( ) ( ) ( ) ( )irtQtFtFtF SDI ,,=++ .......................................................(2.51)
Dimana :
IF = vektor gaya inertia
DF = vektor gaya damping
SF = vektor gaya kekakuan
Q = vektor beban luar, harmonik atau fungsi stochastic dari waktu
Ada banyak metode numerik yang telah dikembangkan untuk menyelesaikan
persamaan gerak pada analisis time domain yaitu menggunakan teknik integrasi
direct step by step. Metode Newmark-Wilson dan Runge-Kutta umumnya dipakai
untuk menyelesaikan persamaan diferensial second order. Bila analisis digunakan
untuk gelombang reguler tunggal, maka ketergantungan frekuensi dari added mass
dan koefisien damping untuk periode gelombang tertentu dapat secara langsung
digunakan. Ketika analisis dilakukan pada random sea maka pertimbangan
seharusnya diberikan ketergantungan frekuensi terhadap massa tambah dan
koeffisien dampingnya.
Dengan menyelesaikan persamaan tersebut menggunakan prosedur integrasi waktu,
didapat solusi pada pola responses time history r(t). Pada umumnya semua matrik
sistem (massa, damping, dan kekakuan) dapat difungsikan sebagai respons atau
waktu, seperti pada kasus vektor beban (analisis non linier). Matrik sistem konstan
memberikan analisis linier. Output dari analisis time domain adalah respons time
series dimana :
a. Simulasi gelombang reguler dapat digunakan untuk memprediksikan transfer
function dengan mengambil rasio respons amplitude dengan input amplitudo
gelombang.
b. Spektrum respons dapat dihitung dari time series, memberikan informasi yang
sama dengan analisis frekuensi domain.
29

c. Respon ektrim dapat diestimasi secara langsung dari puncak respons selama
simulasi.
Metode frequency domain adalah linier dan dibatasi dalam hal tipe history beban
yang dipertimbangkan, seperti hanya dapat memberikan solusi khusus untuk dasar
persamaan diferensial. Disini transient response tidak dapat dideskripsikan. Untuk
sistim non-linier, beberapa tipe linierisasi harus dilakukan. Pengaruh kekakuan non-
linier karena variasi tension dan besarnya displacement tidak dapat dihitung. Nilai
statik untuk tension dan deformasi harus diaplikasikan ketika penentuan matrik
sistim.
Pada analisa frequency domain, keseimbangan dinamik dari sistem linier dapat
diformulasikan sebagai berikut :
( ) ( ) ( ) tiXerKrCrM ωωωω =++ &&& ......................................................(2.52)
Dimana :
( )ωM = matrik massa
( )ωC = matrik damping
( )ωK = matrik kekakuan
X = vektor beban kompleks memberikan informasi pada amplitudo beban dan
fase pada semua derajat kebebasan. Pola menetapkan variasi harmonik
dari contoh beban dengan frekuensi
tie ω
ω
r = vektor displacement
solusi dari persamaan tersebut dapat diperoleh sebagai berikut :
( ) ( ) ( )ωωω XHr = ..............................................................................(2.53)
30

Dimana :
Matrik response frekuensi kompleks
( ) [ 12 −+−= CiMKH ωωω ] .................................................................(2.54)
Formulasi tersebut mengijinkan frekuensi tergantung matrik sistem. Respons dari
beban stokastik dapat diperoleh dari beban pengenalan dan konsep spektra response.
31