bab ii tinjauan pustaka dan landasan teori 2.1...
TRANSCRIPT

4
BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI
2.1 Tinjauan Pustaka
Materi yang berhubungan dengan miniatur lift berbasis PLC sudah banyak
diangkat sebagai judul untuk menyelesaikan studi di jurusan Teknik Elektro. Tugas
Akhir mahasiswa Teknik Elektro Universitas Sumatera Utara contohnya, mengangkat
judul Perancangan Prototipe lift 4 lantai yang dikontrol PLC (Syafrizal, 2009) dalam
tulisannya Syafrizal tidak memanfaatkan Tugas Akhirnya sebagai modul praktikum.
Tugas Akhir yang dimaksud hanya dibatasi sebagai pengguna dan hanya membahas
struktur dan arsitektur serta komponen-komponen dasar PLC, dan tidak dibahas
secara mendetail, tidak membahas karakteristik motor arus searah secara mendalam.
Tugas Akhir lainnya misalnya dibuat oleh mahasiswa Teknik Elektro Institut
Teknologi Sepuluh Nopember Surabaya, dengan judul Pembuatan Miniatur Lift
Barang 3 Lantai Dengan Penggerak Berupa Ulir (Hadziq,M. dan R.H. Putra, 2009).
Tugas Akhir ini dibuat hanya sebagai cara kerja lift barang yang sebenarnya
digunakan dalam industri.
Dalam penelusuran pustaka yang telah dilakukan, khususnya yang
berhubungan dengan materi PLC, belum ditemukan rancang bangun miniatur lift
sebagai modul praktikum PLC dan Mekatronika. Adapun referensi yang ditemukan
hanya sekedar memberi teori singkat tentang cara kerja lift, fungsi PLC dan cara
pengontrolan motor melalui program yang diisikan dalam PLC dan belum
mencantumkan pembahasan mengenai rancang bangun miniatur lift serta sebagai
modul praktikum mata kuliah PLC dan Mekatronika seperti yang dilakukan dengan
Tugas Akhir yang dibuat.

5
2.2 Landasan Teori
2.2.1 Lift
Lift adalah seperangkat alat yang digunakan untuk mengangkut orang atau
barang secara vertikal dengan menggunakan seperangkat alat mekanik baik disertai
alat otomatis ataupun manual (Wicaksono. H, 2009). Lift bekerja dengan bantuan
relay atau kontaktor magnetik pada umumnya, pengendali lift yang digunakan adalah
sistem pengendali lift berbasis PLC.
2.2.2 Programmable Logic Controller (PLC)
PLC (Programmable Logic Controller) yaitu kendali logika terprogram
merupakan suatu piranti elektronik yang dirancang untuk dapat beroperasi secara
digital dengan menggunakan memori sebagai media penyimpanan instruksi-instruksi
internal untuk menjalankan fungsi-fungsi logika, seperti fungsi pencacah, fungsi
urutan proses, fungsi pewaktu, fungsi aritmatika, dan fungsi yang lainnya dengan cara
memprogramnya.(Budianto, M., A. Wijaya, 2003) Program-program dibuat
kemudian dimasukkan dalam PLC melalui programmer. Pembuatan program dapat
menggunakan komputer sehingga dapat mempercepat hasil pekerjaan. Setelah
program selesai ditulis dan diuji, maka program dapat didesain dengan mudah ke
sejumlah PLC lainnya. Fungsi lain pada PLC adalah dapat digunakan untuk
memonitor jalannya proses pengendalian yang sedang berlangsung, sehingga dapat
dengan mudah dikenali urutan kerja (work sequence) proses pengendalian yang
terjadi pada saat itu.
Pabrik pembuat PLC mendesain sedemikian rupa sehingga pengguna dapat
dengan mudah menguasai fungsi-fungsi dan logika-logika dalam PLC hanya dalam
beberapa jam saja. Fungsi-fungsi dasar yang banyak digunakan antara lain : kontak-
kontak logika, pewaktu (timer), dan pencacah (counter).

6
Dalam sistem PLC terdapat empat komponen bagian utama, yaitu :
1. Central Processing Unit (CPU), merupakan otak dari PLC yang terdiri dari 3
(tiga) bagian, yaitu :
a. Mikroprosesor, merupakan otak dari PLC yang difungsikan untuk operasi
matematika dan operasi logika.
b. Memori, merupakan daerah CPU yang digunakan untuk melakukan proses
penyimpanan dan pengiriman data pada PLC.
c. Catu daya, yang berfungsi untuk mengubah sumber masukan tegangan
bolak-balik menjadi tegangan searah.
2. Programmer/Monitor, adalah perangkat pemrograman yang digunakan untuk
pemrograman ini umumnya tidak tersambung secara permanen ke dalam PLC.
Jalannya program juga dapat diamati melalui perangkat ini.
3. Input/Output Modules, adalah antarmuka antara PLC dan perangkat eksternal
(peralatan input dan peralatan output) dimana prosesor menerima informasi
dari perangkat-perangkat eksternal tersebut dan mengkomunikasikan informasi
kontrol ke perangkat-perangkat eksternal tersebut.
4. Raks dan Chasis, adalah sebagai rumah untuk PLC dan sebagai dudukan PLC
agar posisinya stabil.
Secara blok diagram, hubungan utama dari PLC dapat dilihat pada Gambar 2.1.
Gambar 2.1. Hubungan Bagian Utama dari PLC (Sumber: Putra, A.E, 2004)

7
2.2.3 Programmable Logic Controller (PLC) OMRON CPMA1-30CDR-D
Berikut adalah karakteristik dari PLC OMRON NCPMA1-30CDR-D yang
dikutip dari Beginner Guide PLC Controller (Omron Asia Pacific LTD PTE, 1999).
Secara umum, PLC Omron CPMA1-30CDR-D memiliki karakteristik sebagai
berikut:
Memiliki 30 terminal I/O yang terpasang dalam CPU, yaitu 18 buah terminal
input dan 12 buah terminal output.
Sebuah satuan I/O ekspansi dapat dihubungkan ke CPU dengan menambah 20
terminal I/O ekstra.
PLC CPMA1-30CDR-D diperlengkapi dengan sebuah fungsi filter untuk
mencegah operasi yang salah yang disebabkan oleh chatter atau noise pada
sinyal input. Pemakai dapat memilih sebuah konstanta waktu input 1 ms, 2
ms, 4 ms, 8 ms, 16 ms, 32 ms, 64 ms, atau 128 ms.
Memori flash menyediakan memori cadangan tanpa baterei.
Input respon-cepat dapat mendeteksi sinyal input dengan pulsa sependek 0,2
ms tanpa peduli saatnya selama siklus PLC. Input respon-cepat dan input
interupsi menggunakan terminal input yang sama.
PLC CPMA1-30CDR-D mempunyai sebuah timer interval berkecepatan
tinggi yang dapat diset dari 0,5 ms sampai 319968 ms. Timer dapat diset
untuk memicu sebuah interupsi tunggal (one-shot mode) atau interupsi
berulang terjadwal (scheduled interrupt mode).
PLC CPMA1-30CDR-D mempunyai counter berkecepatan tinggi yang dapat
digunakan dalam mode hitungan naik (incremental mode) atau mode up/down.
Counter berkecepatan tinggi dapat dikombinasikan dengan input interupsi
untuk melakukan kontrol nilai target atau kontrol daerah perbandingan yang
tidak dipengaruhi oleh waktu siklus PLC.
8
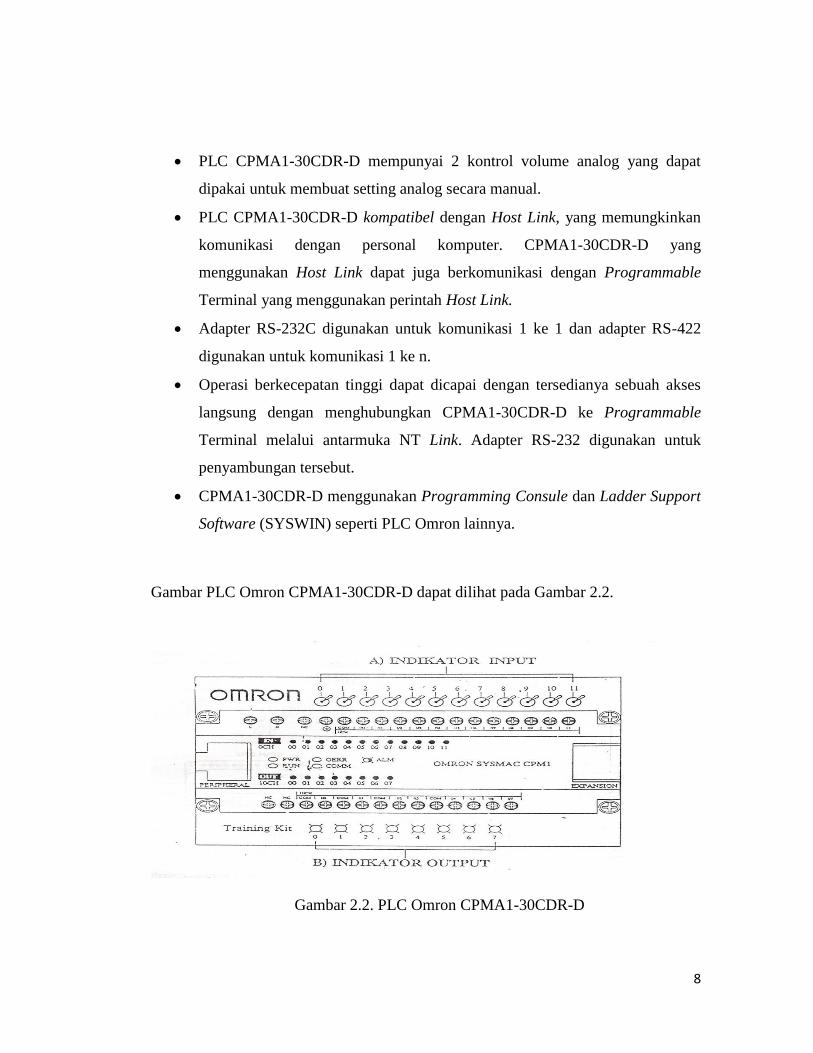
PLC CPMA1-30CDR-D mempunyai 2 kontrol volume analog yang dapat
dipakai untuk membuat setting analog secara manual.
PLC CPMA1-30CDR-D kompatibel dengan Host Link, yang memungkinkan
komunikasi dengan personal komputer. CPMA1-30CDR-D yang
menggunakan Host Link dapat juga berkomunikasi dengan Programmable
Terminal yang menggunakan perintah Host Link.
Adapter RS-232C digunakan untuk komunikasi 1 ke 1 dan adapter RS-422
digunakan untuk komunikasi 1 ke n.
Operasi berkecepatan tinggi dapat dicapai dengan tersedianya sebuah akses
langsung dengan menghubungkan CPMA1-30CDR-D ke Programmable
Terminal melalui antarmuka NT Link. Adapter RS-232 digunakan untuk
penyambungan tersebut.
CPMA1-30CDR-D menggunakan Programming Consule dan Ladder Support
Software (SYSWIN) seperti PLC Omron lainnya.
Gambar PLC Omron CPMA1-30CDR-D dapat dilihat pada Gambar 2.2.
Gambar 2.2. PLC Omron CPMA1-30CDR-D

9
Seperti terlihat pada Gambar 2.2., PLC Omron CPMA1-30CDR-D selain
adanya indikator keluaran (OUT) dan masukan (IN), terlihat juga adanya empat
macam lampu indikator yaitu PWR, RUN, ERR/ALM dan COMM. Arti masing-
masing lampu indikator tersebut ditunjukkan pada Tabel 2.1.
Tabel 2.1. Arti Lampu Indikator PLC Omron CPMA1-30CDR-D
Indikator Status Keterangan
PWR
(hijau)
ON Catu daya disalurkan ke PLC
OFF Catu daya tidak disalurkan ke PLC
RUN
(hijau)
ON PLC dalam kondisi mode kerja RUN atau MONITOR
OFF PLC dalam kondisi mode PROGRAM atau munculnya
kesalahan yang fatal
COMM
(kuning)
Kedip Data sedang dikirim melalui port periferal atau RS-232C
OFF Tidak ada proses pengiriman data melalui port periferal maupun
RS-232C
ERR/ALM
(merah)
ON Muncul suatu kesalahan fatal (operasi PLC berhenti)
Kedip Muncul suatu kesalahan tak-fatal (operasi PLC berlanjut)
OFF Operasi berjalan dengan normal
2.2.4. Diagram Tangga (Ladder Diagram)
Program untuk sistem-sistem berbasis mikroprosesor harus dimuatkan dalam
bentuk kode mesin. Kode ini merupakan serangkaian bilangan biner yang
mempresentasikan instruksi-instruksi program. Bahasa assembler berbasis mnemonic
juga dapat dipakai. Akan tetapi, penggunaan metode-metode ini untuk menuliskan
program membutuhkan keahlian pemrograman hingga taraf tertentu, sementara PLC
ditujukan untuk dapat digunakan oleh para insinyur yang tidak memiliki banyak
pengetahuan mengenai pemrograman. Sebagai konsekuensinya, dikembangkanlah

10
metode pemrograman tangga (ladder programming). Metode ini menyediakan suatu
cara untuk menuliskan program-program, yang kemudian dapat dikonversikan
menjadi kode mesin oleh suatu software sehingga dapat digunakan oleh
mikroprosesor PLC.
Sebuah diagram tangga atau ladder diagram terdiri dari sebuah garis menurun
ke bawah pada sisi kiri dengan garis-garis bercabang ke kanan. Garis yang ada di
sebelah kiri disebut sebagai palang bis (bus bar), sedangkan garis-garis cabang (the
branching lines) adalah baris instruksi atau anak tangga. Sepanjang garis instruksi
ditempatkan berbagai macam kondisi yang terhubung ke instruksi lain di sisi kanan.
Kombinasi logika dari instruksi-instruksi tersebut menyatakan kapan dan bagaimana
instruksi yang ada di sisi kanan tersebut dikerjakan.
2.2.5. Instruksi-Instruksi Dasar Pemrograman
1. Instruksi LOAD (LD) dan LOAD NOT (LD NOT)
Kondisi pertama yang mengawali sembarang blok logika di dalam diagram
tangga berkaitan dengan instruksi LD atau LD NOT.
Diagram ladder instruksi LOAD dan LOAD NOT :
Gambar 2.3 diagram ladder instruksi LOAD dan LOAD NOT

11
Kode mnemonic LOAD dan LOAD NOT dapat dilihat pada Tabel 2.2.
Tabel 2.2 Kode Mnemonic LOAD dan LOAD NOT
Alamat Instruksi Operan
00000 LD 00000
00001 Instruksi
00002 LD NOT 00000
00003 Instruksi
2. Instruksi And Dan And Not
Jika terdapat dua atau lebih kondisi yang dihubungkan secara seri pada
garis instruksi yang sama, maka kondisi yang pertama menggunakan instruksi
LD atau LD NOT dan sisanya menggunakan instruksi AND dan AND NOT.
Diagram ladder instruksi AND dan AND NOT:
Gambar 2.4 Ladder Diagram Instruksi AND dan AND NOT

12
Kode mnemonic instruksi AND Dan AND NOT dapat dilihat pada Tabel 2.3.
Tabel 2.3 mnemonic instruksi AND Dan AND NOT
Alamat Instruksi Operan
00000 LD 00000
00001 AND NOT 00100
00002 AND LR 0000
00003 Instruksi
3. Instruksi Or Dan Or Not
Jika dua atau lebih kondisi dihubungkan secara paralel, artinya dalam garis
instruksi yang berbeda kemudian bergabung lagi dalam satu garis instruksi yang
sama, maka kondisi pertama terkait dengan instruksi LD atau LD NOT dan sisanya
berkaitan dengan instruksi OR atau OR NOT.
Diagram ladder instruksi OR Dan OR NOT:
Gambar 2.5 Ladder Diagram Instruksi OR Dan OR NOT
13
Kode mnemonic instruksi OR Dan OR NOT dapat dilihat pada Tabel 2.4.
Tabel 2.4 Ladder Diagram Instruksi OR Dan OR NOT
Alamat Instruksi Operan
00000 LD NOT 00000
00001 OR NOT 00100
00002 OR LR 0000
00003 Instruksi
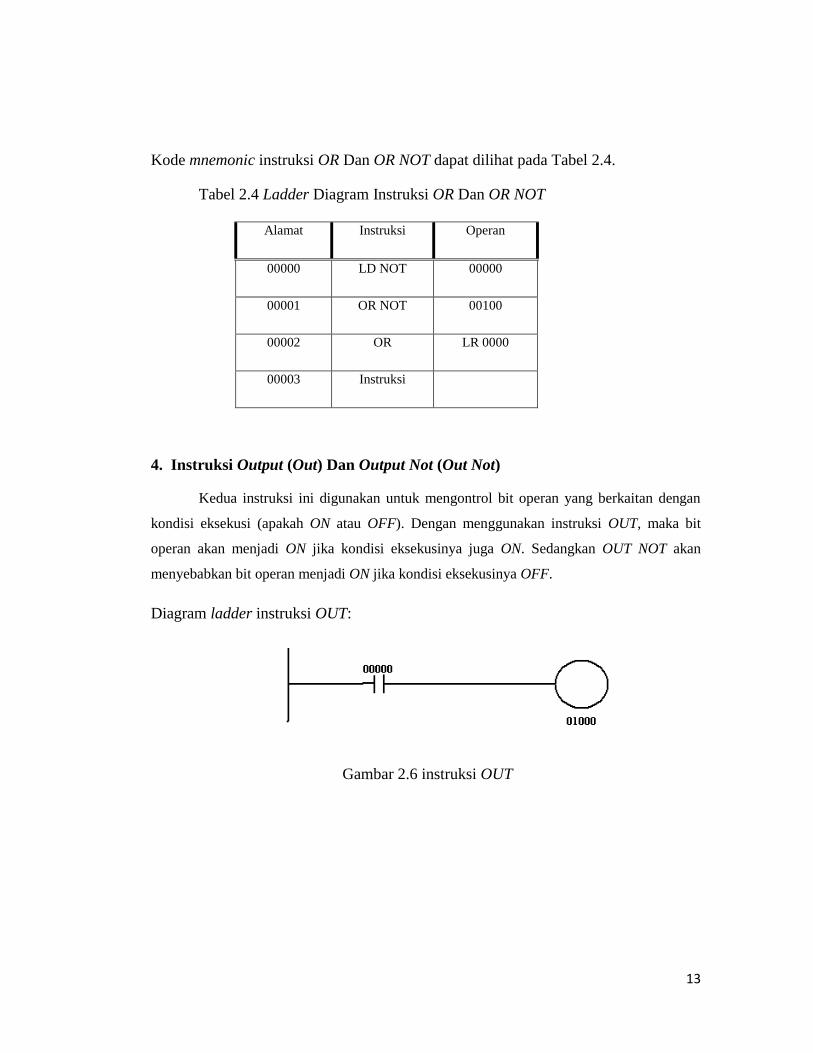
4. Instruksi Output (Out) Dan Output Not (Out Not)
Kedua instruksi ini digunakan untuk mengontrol bit operan yang berkaitan dengan
kondisi eksekusi (apakah ON atau OFF). Dengan menggunakan instruksi OUT, maka bit
operan akan menjadi ON jika kondisi eksekusinya juga ON. Sedangkan OUT NOT akan
menyebabkan bit operan menjadi ON jika kondisi eksekusinya OFF.
Diagram ladder instruksi OUT:
Gambar 2.6 instruksi OUT

14
Kode mnemonic instruksi OUT dapat dilihat pada Tabel 2.5.
Tabel 2.5 Mnemonic Instruksi Out
Alamat Instruksi Operan
00000 LD 00000
00001 OUT 01000
Diagram ladder instruksi OUT NOT:
Gambar 2.7 Ladder Diagram Instruksi OUT NOT
Kode mnemonic instruksi OUT NOT dapat dilihat pada Tabel 2.6.
Tabel 2.6 Mnemonic Instruksi OUT NOT
Alamat Instruksi Operan
00000 LD 00000
00001 OUT NOT 01000

15
5. Instruksi Timer (Tim 01+50)
Instruksi TIM (Timer) dapat digunakan sebagai timer ON-delay atau timer
OFF-delay pada rangkaian relay. Nilai setting value (SV) berkisar dari 0000 sampai
9999 ( 0 sampai 999,9 detik).
Diagram ladder rangkaian On dan Off delay:
Gambar 2.8 Ladder Diagram Instruksi Timer (Tim 01+50)

16
Kode Mnemonic instruksi TIMER (TIM 01+50) dapat dilihat pada Tabel 2.7.
Tabel 2.7 Mnemonic Instruksi Timer (Tim 01+50)
Alamat Instruksi Operan
00000 LD 00000
00001 TIM 000
#0050
00002 LD TIM000
00003 OR 01000
00004 AND NOT TIM001
00005 OUT 01000
00006 LD 01000
00007 AND NOT 00000
00008 TIM 001
#0050
00009 END(01)
6. Instruksi Counter (CNT)
Instruksi CNT (Counter) adalah sebuah counter penurunan yang diset awal.
Penurunan satu hitungan setiap kali saat sebuah sinyal input berubah dari OFF ke
ON. Counter harus diprogram dengan input hitung, input reset, angka counter, dan
nilai set (SV). Nilai set ini dapat berkisar dari 0000 sampai 9999.

17
Diagram ladder COUNTER (CNT):
Gambar 2.9 Ladder Diagram Instruksi Counter (CNT)
Kode mnemonic instruksi COUNTER (CNT) dapat dilihat pada Tabel 2.8.
Tabel 2.8 mnemonic instruksi COUNTER (CNT)
Alamat Instruksi Operan
00000 LD 00000
00001 LD 00002
00002 CNT 001
#0010
00003 LD CNT 001
00004 OUT 01002
00005 END(01)

18
7. Instruksi End
Instruksi terakhir yang harus dituliskan atau digambarkan dalam diagram
tangga adalah instruksi END. CPU pada PLC akan mengerjakan semua instruksi
dalam program dari awal (baris pertama) hingga ditemui instruksi END yang
pertama, sebelum kembali lagi mengerjakan instruksi dalam program dari awal lagi.
Artinya instruksi-instruksi yang ada di bawah atau setelah instruksi END akan
diabaikan.
Diagram ladder instruksi END:
Gambar 2.10 instruksi Ladder diagram END
2.2.6. Software SYSWIN V_3.4
Diagram tangga dibuat dengan menggunakan program penyuntingan
diagram tangga yang dijalankan melalui komputer dan komunikasi transfer
programnya dilakukan melalui kanal serial. SYSWIN adalah software pemrograman
diagram tangga untuk PLC OMRON CPMA1-30CDR-D. Jendela penyuntingan
diagram tangga ditunjukkan pada Gambar 2.11.
Gambar 2.11. SYSWIN Window

19
2.2.7. Motor DC
Motor DC adalah suatu mesin yang berfungsi mengubah tenaga listrik arus
searah menjadi tenaga gerak atau energy mekanik, dimana tenaga gerak tersebut
berupa putaran dari pada rotor. (Okanandaferry.wordpress.com). Prinsip kerjanya
adalah apabila sebuah kawat penghantar yang dialiri arus diletakan diantara dua buah
kutub magnet maka pada kawat itu akan bekerja suatu gaya yang mengerakan kawat
itu (gaya Lorentz). Kontruksi dari motor DC terbagi atas beberapa bagian antara lain:
Stator atau bagian yang diam, terdiri dari:
Rumah stator (gandar) sebagai tempat jalan mengalirnya medan magnet
yang dihasilkan oleh kutub-kutub magnet, dan melindungi bagian-bagian
mesin lainnya, sehingga dibuat dari bahan feromagnetic.
Rotor yang berputar, terdiri dari jangkar, lilitan jangkar, komutator dan
sikat.
Gambar 2.12 Motor DC/ Power Window

20
2.2.8 LIMIT SWITCH
Saklar batas waktu atau limit switch adalah saklar yang dapat dioperasikan
secara otomatis ataupun manual. Limit Switch mempunyai fungsi yang sama yaitu
kontak NO (normaly open) dan NC (normaly close). Limit switch akan bekerja jika
ada benda yang menekan rollernya sehingga kedudukan kontak NO menjadi NC dan
kontak NC menjadi NO. jika benda sudah diangkat, roller dari limit switch kembali
ke posisi semula, demikian pula dengan kedudukan kontak-kontaknya.
Gambar 2.13 Limit Switch
2.2.9 PUSH BUTTON
Push button adalah saklar yang beroperasi dengan cara ditekan, dan bisa
melakukan dua fungsi berbeda, yakni menutup sirkuit bila ditekan, atau justru
membuka sirkuit bila ditekan. Jika tekanan dilepaskan atau terjadi tekanan berikutnya
maka akan menormalkan kembali tombol ke posisi semula dan sirkuit kembali ke
status semula.
Gambar 2.14 Push Button
21
2.2.10 RELAY
Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara
elektronik (elektro magnetik). Saklar pada relay akan terjadi perubahan posisi OFF
ke ON pada saat diberikan energi elektro magnetik pada armatur relay tersebut. Relay
pada dasarnya terdiri dari 2 bagian utama yaitu saklar mekanik dan sistem
pembangkit elektromagnetik (induktor inti besi). saklar atau kontaktor relay
dikendalikan menggunakan tegangan listrik yang diberikan ke induktor pembangkit
magnet untuk menarik armatur tuas saklar atau kontaktor relay. Relay yang ada
dipasaran terdapat berbagai bentuk dan ukuran dengan tegangan kerja dan jumalh
saklar yang berfariasi, berikut adalah salah satu bentuk relay yang ada dipasaran.
Contoh relay elektro mekanik relay dibutuhkan dalam rangkaian elektronika sebagai
eksekutor sekaligus interface antara beban dan sistem kendali elektronik yang
berbeda sistem power supply-nya. Secara fisik antara saklar atau kontaktor dengan
elektromagnet relay terpisah sehingga antara beban dan sistem kontrol terpisah.
Bagian utama relay elektro mekanik adalah sebagai berikut. Kumparan elektromagnet
saklar atau kontaktor Swing Armatur Spring (Pegas) konstruksi relay elektro mekanik
posisi NC (Normally Close) dari konstruksi relay elektro mekanik diatas dapat
diuraikan sistem kerja atau proses relay bekerja. Pada saat elektromagnet tidak
diberikan sumber tegangan maka tidak ada medan magnet yang menarik armatur,
sehingga skalar relay tetap terhubung ke terminal NC (Normally Close) seperti
terlihat pada gambar konstruksi diatas. Kemudian pada saat elektromagnet diberikan
sumber tegangan maka terdapat medan magnet yang menarik armatur, sehingga
saklar relay terhubung ke terminal NO (Normally Open) seperti terlihat pada gambar
2.15. Konstruksi relai elektro mekanik posisi NO (Normally Open) relay elektro
mekanik memiliki kondisi saklar atau kontaktor dalam 3 posisi. Ketiga posisi saklar
atau kontaktor relay ini akan berubah pada saat relay mendapat tegangan sumber pada
elektromagnetnya. Ketiga posisi saklar relay tersbut adalah : Posisi Normally Open
(NO), yaitu posisi saklar relay yang terhubung ke terminal NO (Normally Open).

22
Kondisi ini akan terjadi pada saat relay mendapat tegangan sumber pada
elektromagnetnya. Posisi Normally Close (NC), yaitu posisi saklar relay yang
terhubung ke terminal NC (Normally Close). Kondisi ini terjadi pada saat relay tidak
mendapat tegangan sumber pada elektromagnetnya. Posisi Change Over (CO), yaitu
kondisi perubahan armatur saklar relay yang berubah dari posisi NC ke NO atau
sebaliknya dari NO ke NC. Kondisi ini terjadi saat sumber tegangan diberikan ke
elektromagnet atau saat sumber tegangan diputus dari elektromagnet relay. Relay
yang ada dipasaran terdapat bebarapa jenis sesuai dengan desain yang ditentukan oleh
produsen relay. Dilihat dari desai saklar relay maka relay dibedakan menjadi : Single
Pole Single Throw (SPST), relay ini memiliki 4 terminal yaitu 2 terminal untuk input
kumaparan elektromagnet dan 2 terminal saklar. Relay ini hanya memiliki posisi NO
(Normally Open) saja. Single Pole Double Throw (SPDT), relay ini memiliki 5
terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 3
terminal saklar. relay jenis ini memiliki 2 kondisi NO dan NC. Double Pole Single
Throw (DPST), relay jenis ini memiliki 6 terminal yaitu terdiri dari 2 terminal untuk
input kumparan elektromagnetik dan 4 terminal saklar untuk 2 saklar yang masing-
masing saklar hanya memiliki kondisi NO saja. Double Pole Double Throw (DPDT),
relay jenis ini memiliki 8 terminal yang terdiri dari 2 terminal untuk kumparan
elektromagnetik dan 6 terminal untuk 2 saklar dengan 2 kondisi NC dan NO untuk
masing-masing saklarnya. Relay dapat digunakan untuk mengontrol motor AC
dengan rangkaian kontrol DC atau beban lain dengan sumber tegangan yang berbeda
antara tegangan rangkaian kontrol dan tegangan beban.
Gambar 2.15 Relay