bab i
TRANSCRIPT

i
PEMBUATAN MEDIA PEMBELAJARAN INTERAKTIF
SISTEM PENGEREMAN BENTUK ELEKTRIK
LAPORAN TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat
guna memperoleh gelar Diploma Tiga (D-3)
pada Politeknik Negeri Ujung Pandang
Oleh :
AGUNG SETIA BELA 341 08 022
AFRYANTO TANDUNGAN 341 08 033
PROGRAM STUDI TEKNIK MESIN
JURUSAN TEKNIK MESIN
POLITEKNIK NEGERI UJUNG PANDANG
MAKASSAR
2011
ii
HALAMAN PENGESAHAN PEMBIMBING
Dengan ini menyatakan bahwa Laporan Tugas Akhir dengan :
Judul : Pembuatan Media Pembelajaran Interaktif Sistem
Pengereman Bentuk Elektrik
Nama/Stambuk : Agung Setia Bela ( 34108022 )
Afryanto Tandungan ( 34108033 )
Jurusan : Teknik Mesin
Program Studi : Teknik Mesin
Telah diterima dan disahkan sebagai salah satu syarat untuk memperoleh gelar Diploma Tiga (D-3) pada program studi Teknik Mesin Jurusan Teknik Mesin
Politeknik Negeri Ujung Pandang.
Makassar, 31 Oktober 2011
Mengesahkan,
Pembimbing I, Pembimbing II,
Ir. Yosrihard Basongan, M.T. Arman, S.T, M.T. NIP. 196212181988031003 NIP. 19781231 200812 1002
Mengetahui:
a.n. Direktur,
Ketua Jurusan Teknik Mesin,
Muh. Tekad,S.T.,M.T.
NIP. 19650824 199003 1 003

iii
HALAMAN PENERIMAAN PANITIA UJIAN
Pada hari ini, 31 Oktober 2011, Panitia Ujian Sidang Tugas Akhir, telah
menerima dengan baik hasil Tugas Akhir oleh mahasiswa :
1. Agung Setia Bela (341 08 022)
2. Afryanto Tandungan (341 08 033)
Dengan judul : ”Pembuatan Media Pembelajaran Interaktif Sistem
Pengereman Bentuk Elektrik”, yang diajukan untuk memenuhi salah satu syarat
guna menyelesaikan studi pada program diploma tiga (D-3) Politeknik Negeri
Ujung Pandang.
Makassar, 31 Oktober 2011
Panitia Tugas Akhir :
1. Ir. Muh. Arsyad Habe, M.T. (Ketua) (.................................)
2. Rudianto, S.T. (Sekretaris) (.................................)
3. Dermawan, S.T, M.T. (Anggota) (.................................)
4. Ir. Yosrihard Basongan, M.T. (Pembimbing I) (.................................)
5. Arman, S.T,M.T. (Pembimbing II) (.................................)
iv
KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Allah SWT, karena dengan rahmat
dan hidayahnya, sehingga penulis dapat menyelesaikan laporan tugas akhir ini.
Salawat dan salam tak terlupa tercurah kepada Rasulullah SAW sebagai pencerah
kehidupan manusia di dunia.
Laporan tugas akhir ini, merupakan salah satu persyaratan yang harus
dipenuhi untuk menyelesaikan studi Diploma Tiga ( D-3) pada Jurusan Teknik
Mesin Program Studi Teknik Mesin Politeknik Negeri Ujung Pandang. Selain itu,
laporan ini merupakan tolak ukur keberhasilan mahasiswa menyelesaikan proyek
tugas akhir yang telah dibuat.
Laporan ini dapat kami selesaikan tidak lepas atas bantuan dari beberapa
pihak, oleh sebab itu penulis ingin mengucapkan terima kasih yang sebesar-
besarnya kepada :
1. Keluarga yang telah memberi bantuan moril maupun materil.
2. Segenap staf administrasi Politeknik Negeri Ujung Pandang yang telah
membantu kelancaran administrasi kami.
3. Bapak Muh. Tekad, ST., MT. selaku Ketua Jurusan Teknik Mesin
4. Bapak Abram Tangkemanda, ST., MT. selaku Ketua Program Studi
Teknik Mesin.
5. Bapak Ir. Yosrihard Basongan, M.T. selaku pembimbing I tugas akhir
kami.
v
6. Bapak Arman, S.T, M.T. selaku pembimbing II tugas akhir kami.
7. Semua pihak yang telah membantu kami dalam menyelesaikan proyek
tugas akhir ini.
Penulisan laporan tugas ini mungkin masih jauh dari kesempurnaan, oleh
karena itu kami selaku penulis terbuka dan mengharapkan kritik dan saran dari
pembaca yang sifatnya membangun demi kesempurnan laporan ini dan
kesempurnaan pada pembuatan laporan berikutnya.
Akhir kata, penulis berharap laporan ini dapat berguna baik bagi kami dan
kepada masyarakat luas pada umumnya, dan semoga Allah SWT senantiasa
melimpahkan rahmatnya kepada kita semua.
Makassar, 31 Oktober 2011
Penulis
vi
DAFTAR ISI
HALAMAN SAMPUL........................................................................................i
HALAMAN PENGESAHAN PEMBIMBING ...................................................ii
HALAMAN PENERIMAAN PANITIA UJIAN ................................................iii
KATA PENGANTAR .........................................................................................iv
DAFTAR ISI .......................................................................................................vi
DAFTAR GAMBAR ...........................................................................................ix
DAFTAR SIMBOL .............................................................................................x
DAFTAR LAMPIRAN........................................................................................xi
BAB I PENDAHULUAN ..................................................................................1
A. Latar Belakang ..................................................................................1
B. Rumusan Masalah .............................................................................2
C. Tujuan Penelitian ...............................................................................3
D. Manfaat Penelitian .............................................................................3
BAB II TINJAUAN PUSTAKA ........................................................................4
A. Defenisi Media Pembelajaran............................................................4
B. Rem Hidrolik .....................................................................................4
1. Defenisi Rem Hidrolik .................................................................4

vii
2. Mekanisme Penggerak Hidrolik ...................................................5
3. Komponen – Komponen Rem Hidrolik .......................................6
4. Prinsip Kerja Rem Hidrolik ..........................................................12
C. Light Emitting Diode ........................................................................13
D. Liquid Cristal Display (LCD) ...........................................................13
E. DC Potensiometer..............................................................................14
F. System Minimum Mikrokontroller....................................................15
G. CodeVisionAVR................................................................................17
H. Pemerograman Bahasa C untuk AVR ..............................................18
BAB III METODE PENELITIAN ......................................................................20
A. Waktu dan Tempat Penelitian ...........................................................20
1. Waktu ...........................................................................................20
2. Tempat..........................................................................................20
B. Alat dan Bahan..................................................................................20
1. Alat ...............................................................................................20
2. Bahan............................................................................................21
C. Prosedur Penelitian ............................................................................22
1. Langkah Pembuatan .....................................................................22
2. Langkah Perakitan ........................................................................27
3. Prosedur Pengujian .......................................................................28
D. Teknik Analisis Hasil Pengujian .......................................................29
BAB IV HASIL DAN PEMBAHASAN .............................................................31
A. Perhitungan Secara Teoritis...............................................................31
viii
1. Hasil Perhitungan Daya Adaptor .................................................31
2. Hasil Perhitungan Resistor Sebagai Pembatas Arus ....................32
B. Hasil Pembuatan
1. Rangka..........................................................................................33
2. Papan Panel ..................................................................................34
3. Rangkaian Sistem Minimum Mikrokontroler...............................34
4. Kabel Konektor ............................................................................35
C. Pengujian Rangkaian Mikrokontroler ...............................................35
1. Hasil ............................................................................................35
2. Pembahasan ..................................................................................37
D. Pengujian Rangkaian Powersupplay .................................................37
1. Hasil..............................................................................................37
2. Pembahasan ..................................................................................38
E. Pengujian Rangkaian Liquid Cristal Display ( LCD ) .....................38
1. Hasil..............................................................................................38
2. Pembahasan ..................................................................................39
F. Pengujian Media Pembelajaran Interaktif Sistem Pengereman
Bentuk Elektrik..................................................................................39
1. Hasil..............................................................................................39
2. Pembahasan ..................................................................................41
BAB V PENUTUP .............................................................................................44
A. Kesimpulan ........................................................................................44
B. Saran .................................................................................................44

ix
DAFTAR GAMBAR
Gambar 1. Pedal Rem ....................................................................................... 6
Gambar 2. Booster Rem.................................................................................... 7
Gambar 3. Master Slinder ................................................................................. 8
Gambar 4. Pad Rem .......................................................................................... 9
Gambar 5. Disc (Piringan)................................................................................. 10
Gambar 6. Fixed Kaliper................................................................................... 10
Gambar 7. Floating Kaliper .............................................................................. 11
Gambar 8. Prinsip Kerja Rem Hidrolik ............................................................. 12
Gambar 9. Light Emmiting Diode (LED) ......................................................... 13
Gambar 10. Liquid Cristaln Display ................................................................. 14
Gambar 11. DC Potensiometer dan Simbol Potensiometer............................... 14
Gambar 12. Diagram pin-pin mikrokontroler AT Mega 16............................ 15
Gambar 13. Sistem Minimum Mikrokontroler.................................................. 16
Gambar 14. Tampilan Halaman Editing CodeVisionAVR ............................... 18
Gambar 15. Diagram alir Pembuatan ................................................................ 30

x
Gambar 16. Rangka .......................................................................................... 33
Gambar 17. Papan Panel ................................................................................... 34
Gambar 18. Kabel Konektor............................................................................. 35
Gambar 19. Rangkaian pengujian Mikrokontroler............................................ 36
Gambar 20. Rangkaian Power Supplay ............................................................ 37
Gambar 21. Hasil Pengujian Rangkaian Liquid Cristal Display ....................... 39
xi
DAFTAR SIMBOL
Simbol Keterangan Satuan
P Daya Watt
I Arus Amperre
V Tegangan Volt
R Nilai Resistor OHM
VC Tegangan Adaptor Volt
VLED Tegangan LED Volt
xii
DAFTAR LAMPIRAN
Lampiran 1. Skedul Pembuatan Media Pembelajaran Interaktif Sistem
Pengereman Bentuk Elektrik........................................................ 46
Lampiran 2. Foto Media Pembelajaran Interaktif Sistem Pengereman
Bentuk Elektrik ............................................................................ 49
Lampiran 3. Jalur Rangkaian Sistem Minimum Mikrokontroller ..................... 51
Lampiran 4. Rangkaian Elektronik Media Pembelajaran Interaktif
Sistem Pengereman Bentuk Elektrik............................................ 52
1
BAB I
PENDAHULUAN
A. Latar Belakang
Perkembangan zaman yang semakin pesat, menuntut adanya
kemajuan di dalam segala bidang terutama dalam bidang teknologi.
Kemajuan di dalam bidang teknologi ini memudahkan seseorang dalam
melakukan suatu pekerjaan. Salah satu bidang teknologi yang mengalami
kemajuan adalah otomotif. Kemajuan di dalam bidang ini dapat kita lihat
pada kendaraan-kendaraan sekarang yang selalu ingin meningkatkan rasa
kenyamanan bagi pengemudinya. Usaha di dalam peningkatan rasa
kenyamanan tersebut, salah satunya adalah dengan melengkapi sistem
pengereman pada suatu kendaraan.
Sistem pengereman sangat penting dimiliki oleh suatu kendaraan
karena sistem pengereman berfungsi untuk mengurangi kecepatan dan
menghentikan laju kendaraan. Dengan demikian sebagai seorang pengemudi
dapat memperlambat atau menghentikan kendaraan sesuai dengan
keinginannya tanpa melanggar peraturan-peraturan yang berlaku.
Proses pengereman pada kendaraan terjadi secara mekanik yang
dihasilkan oleh tekanan minyak rem. Tekanan minyak rem tersebut
diakibatkan oleh tekanan dari pengemudi melalui pedal rem ke master slinder.
Selanjutnya minyak rem akan meneruskan tekanan ke masing-masing kaliper
pada setiap roda untuk menekan piston ke arah pad rem sehingga pad rem
akan bergesekan dengan piringan dan terjadilah pengereman.

2
Proses pengereman yang terjadi secara mekanik tersebut, sulit
dipahami oleh mahasiswa yang baru pertama kali mempelajari sistem
pengereman karena pada kendaraan sesungguhnya komponen-komponen
sistem pengereman telah digabung menjadi satu dengan komponen-
komponen sistem yang lain pada kendaraan, dengan demikian perlu adanya
media pembelajaran yang dapat memperagakan proses pengereman yang
terjadi secara mekanik pada kendaraan. Salah satu media yang bisa kita
gunakan untuk memperagakan proses pengereman pada kendaraan adalah
media yang berbentuk elektrik.
Melihat latar permasalahan tersebut, maka penulis tertarik untuk
memilih judul “Pembuatan Media Pembelajaran Interaktif Sistem
Pengereman Bentuk Elektrik” dengan cara mengubah proses pengereman
yang terjadi secara mekanik menjadi bentuk elektrik berupa LED yang
disusun sesuai dengan skema sistem pengereman dan penyalaannya dikontrol
menggunaklan mikrokontroler AT Mega 16. Sehingga dengan adanya media
pembelajaran tersebut, sebagai mahasiswa yang baru pertama kali
mempelajari sistem pengereman akan lebih mudah memahami proses
pengereman pada kendaraan, baik itu belajar melalui pengajar maupun belajar
sendiri.
B. Rumusan Masalah
Berdasarkan latar belakang, berikut ini dikemukakan rumusan
masalah dalam bentuk pertanyaan:
3
1. Bagaimana memahami proses pengereman pada kendaraan melalui sistem
elektrik?
2. Bagaimana mengganti proses pengereman yang terjadi secara mekanik
pada kendaraan dengan sistem elektrik untuk pembelajaran sistem
pengereman?
C. Tujuan Penelitian
1. Untuk memahami proses pengereman pada kendaraan melalui sistem
elektrik.
2. Untuk mengganti proses pengereman yang terjadi secara mekanik pada
kendaraan dengan sistem elektrik untuk pembelajaran sistem pengereman.
D. Manfaat Penelitian
1. Sebagai salah satu bahan referensi bagi mahasiswa yang berminat
melakukan penelitian ilmiah dalam bidang yang sama dalam rangka
pengembangan ilmu pengetahuan.
2. Sebagai alat praktikum simulasi sistem rem hidrolik yang dapat digunakan
oleh mahasiswa.
4
BAB II
TINJAUAN PUSTAKA
A. Defenisi Media Pembelajaran.
Ada beberapa defenisi media pembelajaran, akan tetapi pemaparanya
tidak disajikan dengan nama media pembelajaran tetapi dengan nama alat
peraga. Salah satu definisi yang dikemukakan oleh Sudjana ( 2002: 59 )
bahwa “Alat peraga adalah suatu alat yang dapat diserap oleh mata dan
telinga dengan tujuan membantu guru agar proses belajar mengajar siswa
lebih efektif dan efisien”. Sejalan dengan itu Moh. Surya (1992: 75)
mengemukakan bahwa “Alat peraga merupakan salah satu factor untuk
mencapai efisiensi hasil belajar”.
Berdasarkan beberapa pendapat diatas, dapat disimpulkan bahwa
media pembelajaran atau disebut juga dengan alat peraga merupakan segala
macam alat yang digunakan dalam pembelajaran guna membantu
memperlancar jalannya pembelajaran untuk mencapai tujuan yang
diharapkan. Dengan menggunakan alat peraga, mahasiswa lebih terdorong
untuk belajar, lebih aktif dan kreatif sehingga pada akhirnya mencapai hasil
yang lebih optimal.
B. Rem Hidrolik.
1. Defenisi Rem Hidrolik
Defenisi rem hidrolik berikut ini tidak didefenisikan secara
langsung tetapi didefenisikan secara terpisah antara rem dan sistem

5
hidrolik. Adapun pengertian dari rem adalah suatu alat yang digunakan
pada kendaraan untuk menghentikan/memperlambat/menghentikan laju
atau kecepatan pada saat kendaraan itu berjalan
(http://leoteknik.blogspot.com/2008/10/jobsheet-rem-
cakramhidrolik.html). Sedangkan pengertian sistem hidrolik adalah suatu
cara (alat) yang menggunakan oil (minyak) sebagai pengganti tenaga
(http://leoteknik.blogspot.com/2008/10/jobsheet-rem-
cakramhidrolik.html).
Dengan demikian dapat sisimpulkan bahwa defenisi rem hidrolik
adalah suatu alat yang digunakan pada kendaraan untuk menghentikan
atau memperlambat laju kendaraan dengan menggunakan minyak sebagai
pengganti tenaga.
2. Mekanisme Penggerak Hidrolik
Prinsip kerja rem hidrolik adalah menggunakan hukum pascal yaitu
gaya penampang dari fluida akan menghasilkan tekanan yang akan
diteruskan ke segala arah dengan sama besar. Untuk melipat gandakan
daya penekanan pedal digunakan booster rem sehingga daya pengereman
yang dihasilkan lebih besar.
3. Komponen – Komponen Rem Hidrolik
Dari beberapa referensi yang ada komponen-komponen rem
hidrolik salah satunya dikemukakan oleh Arif Sugiharto (2007: 10) yaitu
“1) Pad rem, 2) Disc ( piringan ) 3) Kaliper”. Selain itu, komponen rem
cakram hidrolik dikemukakan oleh Abigain Pakpahan (2009: 9) yaitu “1)
6
Kaliper rem cakram, 2) Bantalan rem cakram, 3) Rotor rem cakram, 3)
Piston, 4) Cairan/Pelumas”.
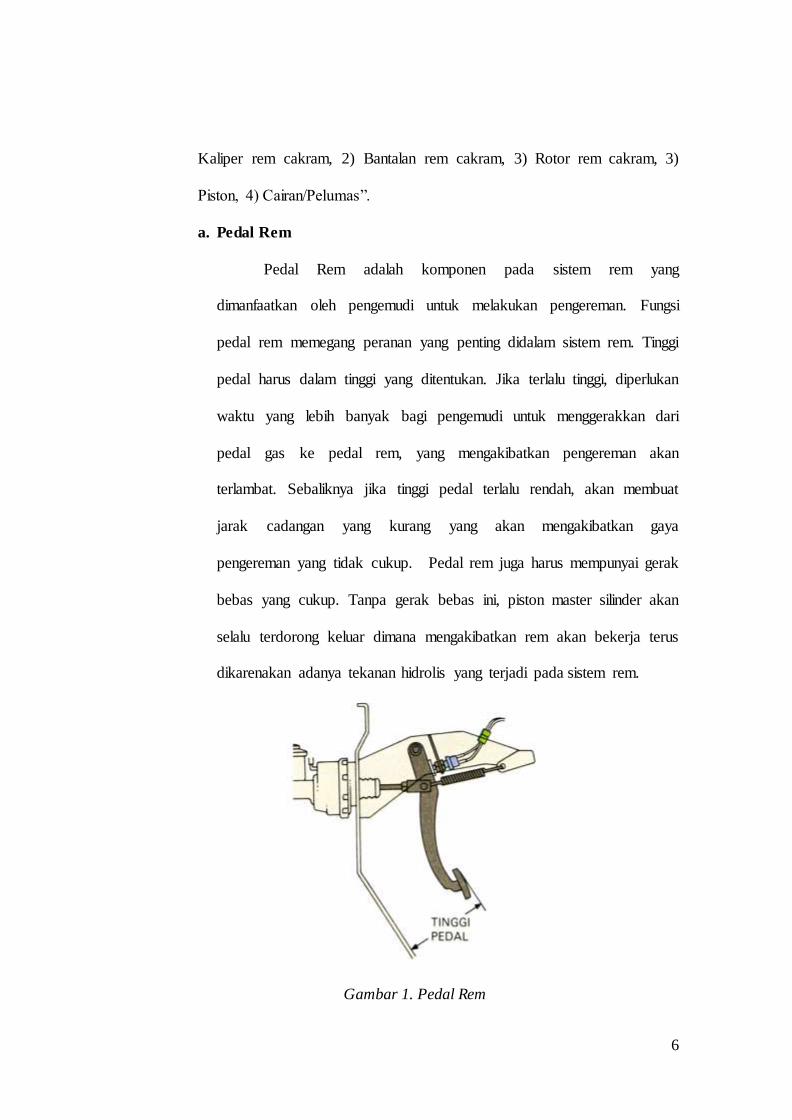
a. Pedal Rem
Pedal Rem adalah komponen pada sistem rem yang
dimanfaatkan oleh pengemudi untuk melakukan pengereman. Fungsi
pedal rem memegang peranan yang penting didalam sistem rem. Tinggi
pedal harus dalam tinggi yang ditentukan. Jika terlalu tinggi, diperlukan
waktu yang lebih banyak bagi pengemudi untuk menggerakkan dari
pedal gas ke pedal rem, yang mengakibatkan pengereman akan
terlambat. Sebaliknya jika tinggi pedal terlalu rendah, akan membuat
jarak cadangan yang kurang yang akan mengakibatkan gaya
pengereman yang tidak cukup. Pedal rem juga harus mempunyai gerak
bebas yang cukup. Tanpa gerak bebas ini, piston master silinder akan
selalu terdorong keluar dimana mengakibatkan rem akan bekerja terus
dikarenakan adanya tekanan hidrolis yang terjadi pada sistem rem.
Gambar 1. Pedal Rem

7
b. Booster Rem
Booster rem merupakan satu komponen pada sistem rem yang
dipasang menjadi satu dengan master silinder dan setelah pedal rem,
yang berfungsi untuk mengurangi tenaga yang diperlukan pengemudi
dalam pengereman.
Booster rem mempunyai membran yang kerjanya disebabkan
karena adanya perbedaan antara tekanan dan kevakuman yang
dihasilkan dari dalam intake manifold mesin. Prinsip kerja booster rem
menggunakan hukum bernoulli yaitu fluida dalam keadaan mengalir
kontinu mempunyai energi tekanan, energi kinetic (kecepatan), dan
energi potensial (kecepatan awal).
Gambar 2. Booster Rem
8
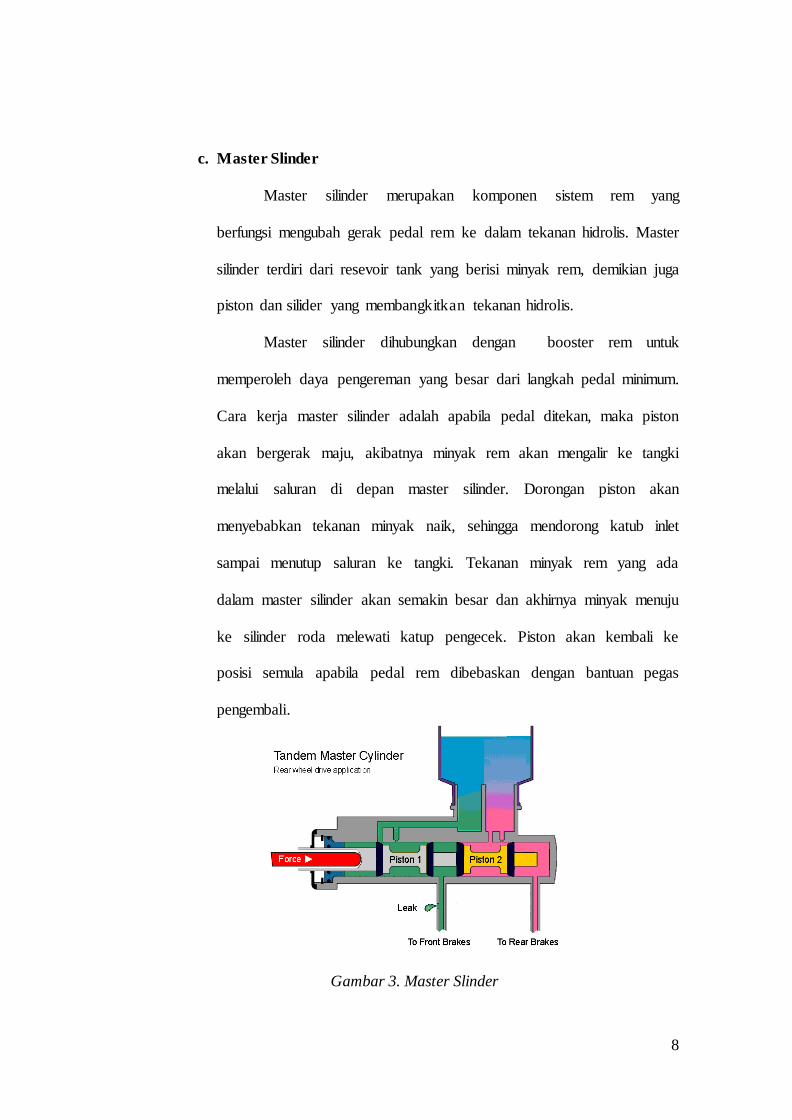
c. Master Slinder
Master silinder merupakan komponen sistem rem yang
berfungsi mengubah gerak pedal rem ke dalam tekanan hidrolis. Master
silinder terdiri dari resevoir tank yang berisi minyak rem, demikian juga
piston dan silider yang membangkitkan tekanan hidrolis.
Master silinder dihubungkan dengan booster rem untuk
memperoleh daya pengereman yang besar dari langkah pedal minimum.
Cara kerja master silinder adalah apabila pedal ditekan, maka piston
akan bergerak maju, akibatnya minyak rem akan mengalir ke tangki
melalui saluran di depan master silinder. Dorongan piston akan
menyebabkan tekanan minyak naik, sehingga mendorong katub inlet
sampai menutup saluran ke tangki. Tekanan minyak rem yang ada
dalam master silinder akan semakin besar dan akhirnya minyak menuju
ke silinder roda melewati katup pengecek. Piston akan kembali ke
posisi semula apabila pedal rem dibebaskan dengan bantuan pegas
pengembali.
Gambar 3. Master Slinder
9
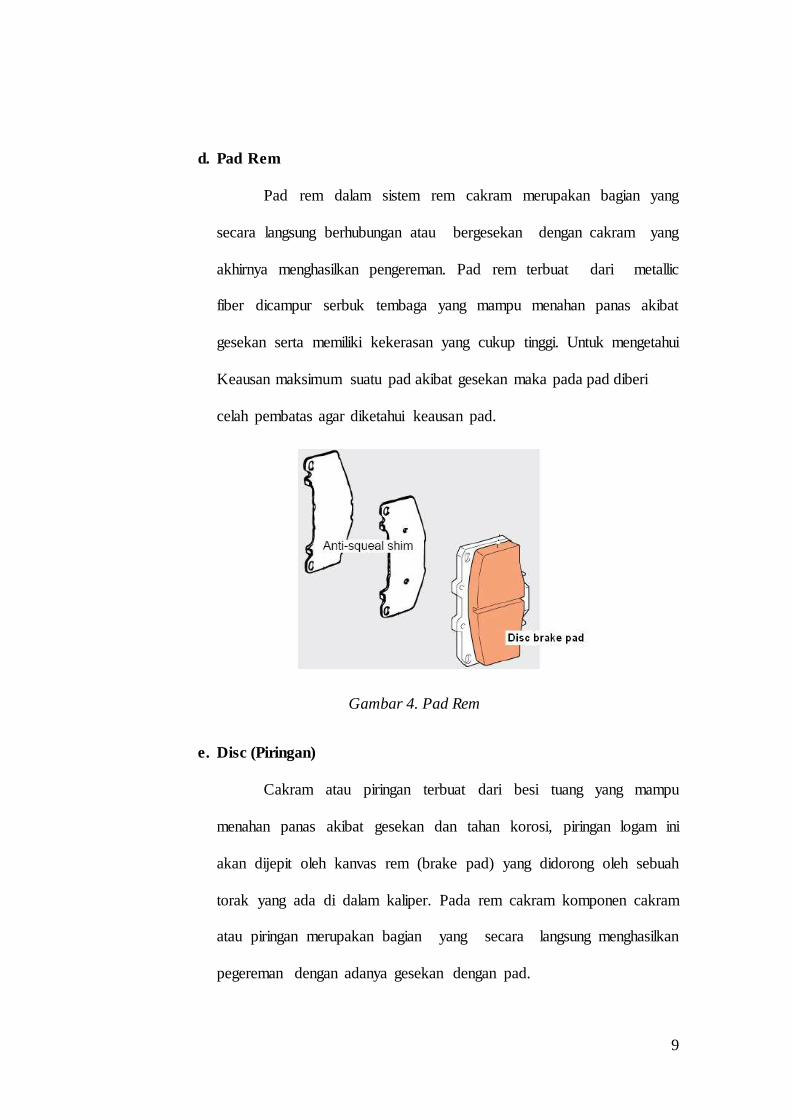
d. Pad Rem
Pad rem dalam sistem rem cakram merupakan bagian yang
secara langsung berhubungan atau bergesekan dengan cakram yang
akhirnya menghasilkan pengereman. Pad rem terbuat dari metallic
fiber dicampur serbuk tembaga yang mampu menahan panas akibat
gesekan serta memiliki kekerasan yang cukup tinggi. Untuk mengetahui
Keausan maksimum suatu pad akibat gesekan maka pada pad diberi
celah pembatas agar diketahui keausan pad.
Gambar 4. Pad Rem
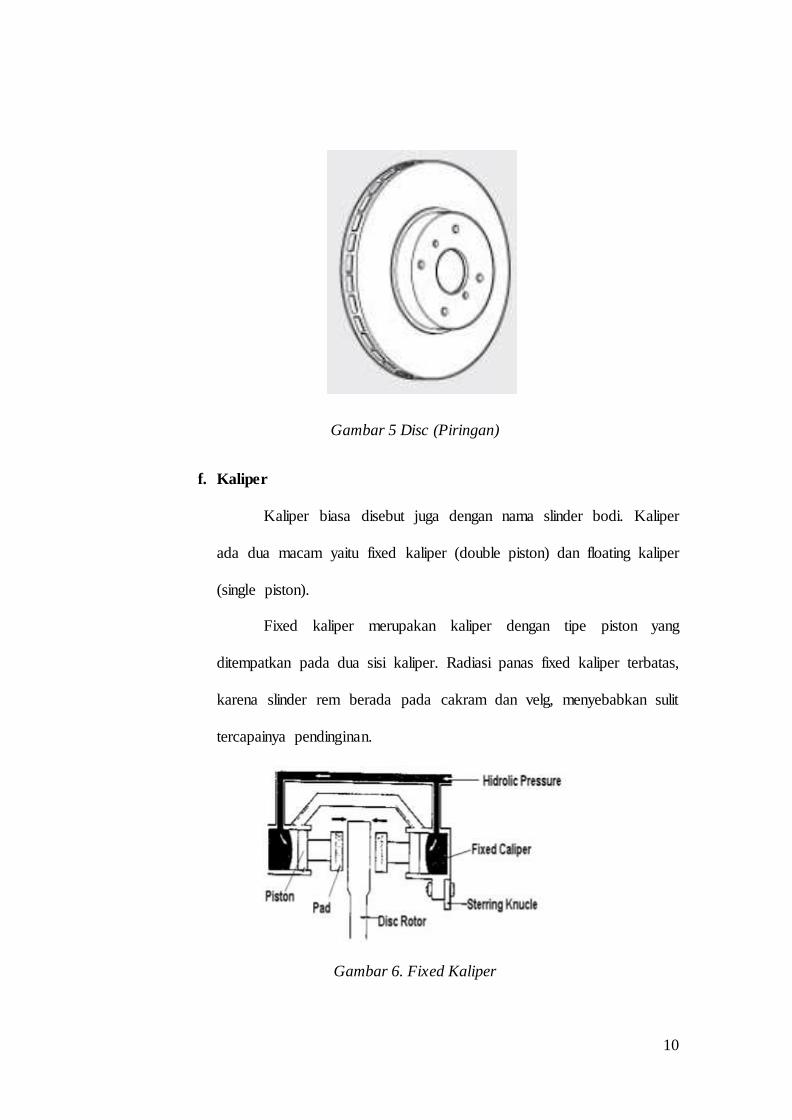
e. Disc (Piringan)
Cakram atau piringan terbuat dari besi tuang yang mampu
menahan panas akibat gesekan dan tahan korosi, piringan logam ini
akan dijepit oleh kanvas rem (brake pad) yang didorong oleh sebuah
torak yang ada di dalam kaliper. Pada rem cakram komponen cakram
atau piringan merupakan bagian yang secara langsung menghasilkan
pegereman dengan adanya gesekan dengan pad.
10
Gambar 5 Disc (Piringan)
f. Kaliper
Kaliper biasa disebut juga dengan nama slinder bodi. Kaliper
ada dua macam yaitu fixed kaliper (double piston) dan floating kaliper
(single piston).
Fixed kaliper merupakan kaliper dengan tipe piston yang
ditempatkan pada dua sisi kaliper. Radiasi panas fixed kaliper terbatas,
karena slinder rem berada pada cakram dan velg, menyebabkan sulit
tercapainya pendinginan.
Gambar 6. Fixed Kaliper
11
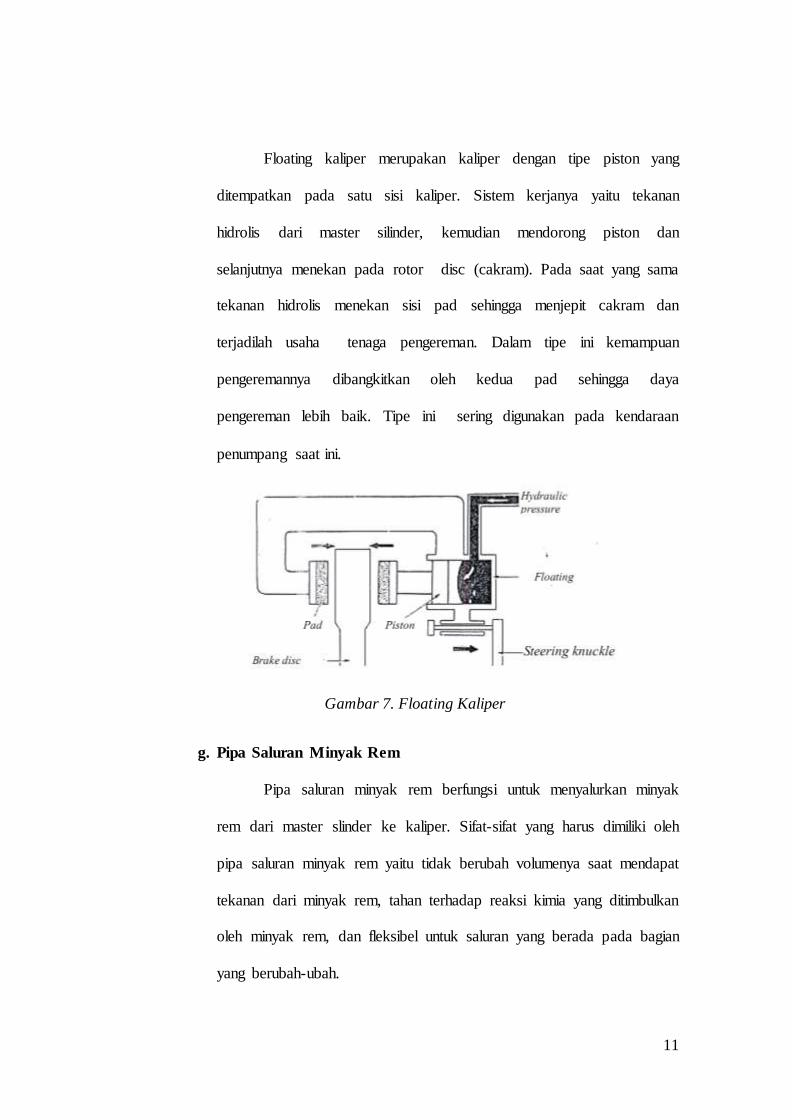
Floating kaliper merupakan kaliper dengan tipe piston yang
ditempatkan pada satu sisi kaliper. Sistem kerjanya yaitu tekanan
hidrolis dari master silinder, kemudian mendorong piston dan
selanjutnya menekan pada rotor disc (cakram). Pada saat yang sama
tekanan hidrolis menekan sisi pad sehingga menjepit cakram dan
terjadilah usaha tenaga pengereman. Dalam tipe ini kemampuan
pengeremannya dibangkitkan oleh kedua pad sehingga daya
pengereman lebih baik. Tipe ini sering digunakan pada kendaraan
penumpang saat ini.
Gambar 7. Floating Kaliper
g. Pipa Saluran Minyak Rem
Pipa saluran minyak rem berfungsi untuk menyalurkan minyak
rem dari master slinder ke kaliper. Sifat-sifat yang harus dimiliki oleh
pipa saluran minyak rem yaitu tidak berubah volumenya saat mendapat
tekanan dari minyak rem, tahan terhadap reaksi kimia yang ditimbulkan
oleh minyak rem, dan fleksibel untuk saluran yang berada pada bagian
yang berubah-ubah.
12
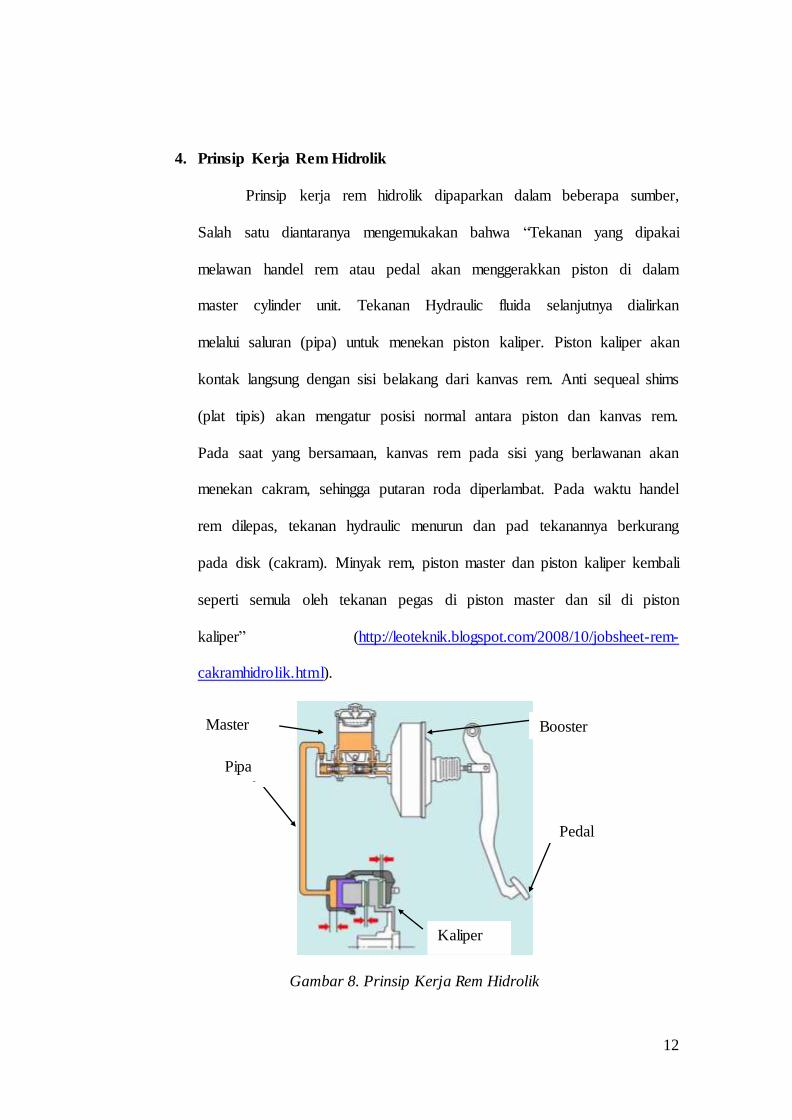
4. Prinsip Kerja Rem Hidrolik
Prinsip kerja rem hidrolik dipaparkan dalam beberapa sumber,
Salah satu diantaranya mengemukakan bahwa “Tekanan yang dipakai
melawan handel rem atau pedal akan menggerakkan piston di dalam
master cylinder unit. Tekanan Hydraulic fluida selanjutnya dialirkan
melalui saluran (pipa) untuk menekan piston kaliper. Piston kaliper akan
kontak langsung dengan sisi belakang dari kanvas rem. Anti sequeal shims
(plat tipis) akan mengatur posisi normal antara piston dan kanvas rem.
Pada saat yang bersamaan, kanvas rem pada sisi yang berlawanan akan
menekan cakram, sehingga putaran roda diperlambat. Pada waktu handel
rem dilepas, tekanan hydraulic menurun dan pad tekanannya berkurang
pada disk (cakram). Minyak rem, piston master dan piston kaliper kembali
seperti semula oleh tekanan pegas di piston master dan sil di piston
kaliper” (http://leoteknik.blogspot.com/2008/10/jobsheet-rem-
cakramhidrolik.html).
Gambar 8. Prinsip Kerja Rem Hidrolik
Pedal
Rem
Kaliper
Booster
Rem
Pipa
Minyak
Rem
Master
Rem
13
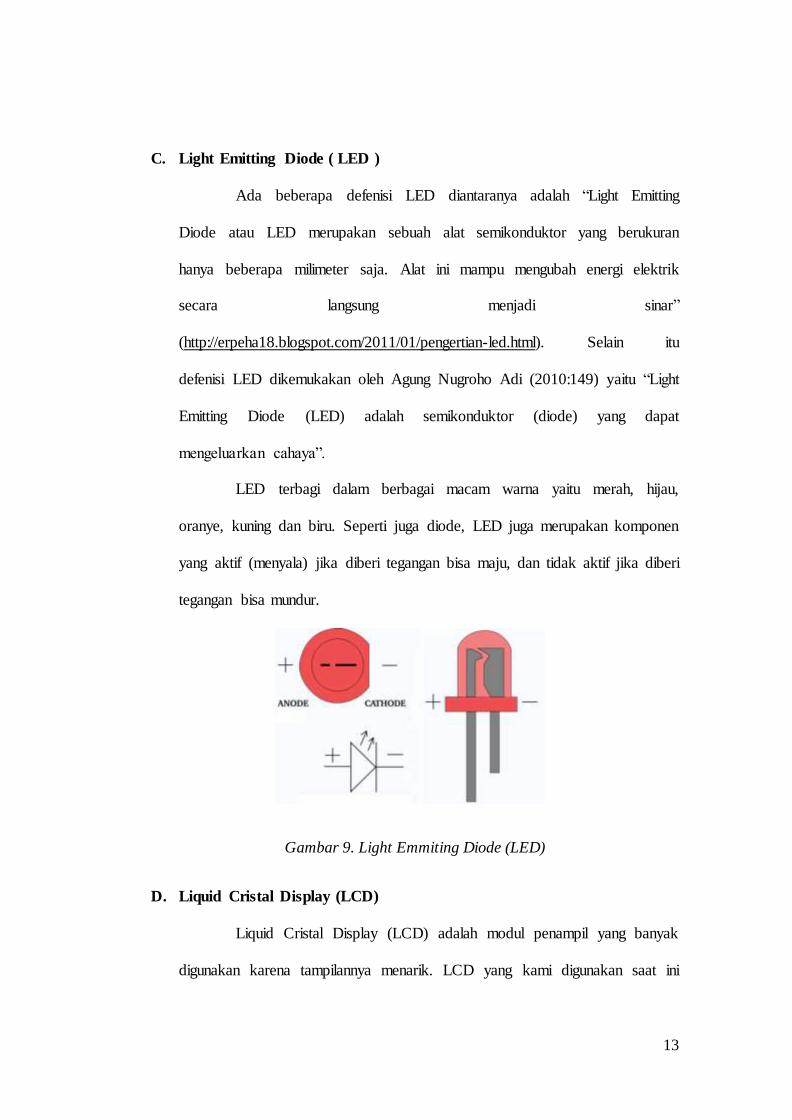
C. Light Emitting Diode ( LED )
Ada beberapa defenisi LED diantaranya adalah “Light Emitting
Diode atau LED merupakan sebuah alat semikonduktor yang berukuran
hanya beberapa milimeter saja. Alat ini mampu mengubah energi elektrik
secara langsung menjadi sinar”
(http://erpeha18.blogspot.com/2011/01/pengertian-led.html). Selain itu
defenisi LED dikemukakan oleh Agung Nugroho Adi (2010:149) yaitu “Light
Emitting Diode (LED) adalah semikonduktor (diode) yang dapat
mengeluarkan cahaya”.
LED terbagi dalam berbagai macam warna yaitu merah, hijau,
oranye, kuning dan biru. Seperti juga diode, LED juga merupakan komponen
yang aktif (menyala) jika diberi tegangan bisa maju, dan tidak aktif jika diberi
tegangan bisa mundur.
Gambar 9. Light Emmiting Diode (LED)
D. Liquid Cristal Display (LCD)
Liquid Cristal Display (LCD) adalah modul penampil yang banyak
digunakan karena tampilannya menarik. LCD yang kami digunakan saat ini
14
adalah LCD M1632 reffurbish karena harganya cukup murah. LCD M1632
merupakan modul LCD dengan tampilan 2 x 16 (2 baris x 16 kolom) dengan
konsumsi daya rendah dan tegangan supplay yang digunakan sebesar 5 volt.
Gambar 10. Liquid Cristal Display
E. DC Potensiometer
Adalah sebuah resistor yang nilainya dapat berubah-ubah dengan
jalan menggeser atau memutar toggle pada alat tersebut. Sehingga nilai
resistor dapat kita tetapkan sesuai dengan kebutuhan. Potensio meter adalah
alat ukur yang dirancang untuk mengukursuatu tegangan dengan cara
membandingkan dengan tegangan lain yang diketahui besarnya.
Potensiometer datan digunakan untuk mengkalibrasi voltmeter dan
amperremeter.
Gambar 11. DCPotensiometer dan Simbol Potensiometer
15
F. Sistem Minimum Mikrokontroler
Sistem minimum mikrokontroler merupakan suatu sistem yang
didalamnya terdapat mikrokontroler. Mikrokontroler pada dasarnya adalah
computer dalam satu chip, yang didalamnya terdapat mokroprosesor, memori,
jalur input/output dan perangkat pelengkap lainnya. Kecepatan pengolahan
data pada mikrokontroler lebih rendah jika dibandingkan dengan PC. Pada PC
kecepatan mikroprosesor yang digunakan saat ini telah mencapai orde GHz,
sedangkan kecepatan oprasi mikrokontroler pada umumnya berkisar antara 1-
16 MHz.
Pada pembuatan media pembelajaran interaktif sistem pengereman
bentuk elektrik kali ini kami menggunakan mikrokontroler yang masih
keluarga dari mikrokontroler AVR. Keluarga mikrokontroler AVR
merupakan mikrokontroler dengan arsitektur modern. Hingga saat ini Atmel
membuat 5 macam mikrokontroler AVR yaitu Tiny AVR, Mega AVR, AVR
XMega, AVR 32 UC3 dan AVR 32 AP7. Pada kali ini kami menggunakan
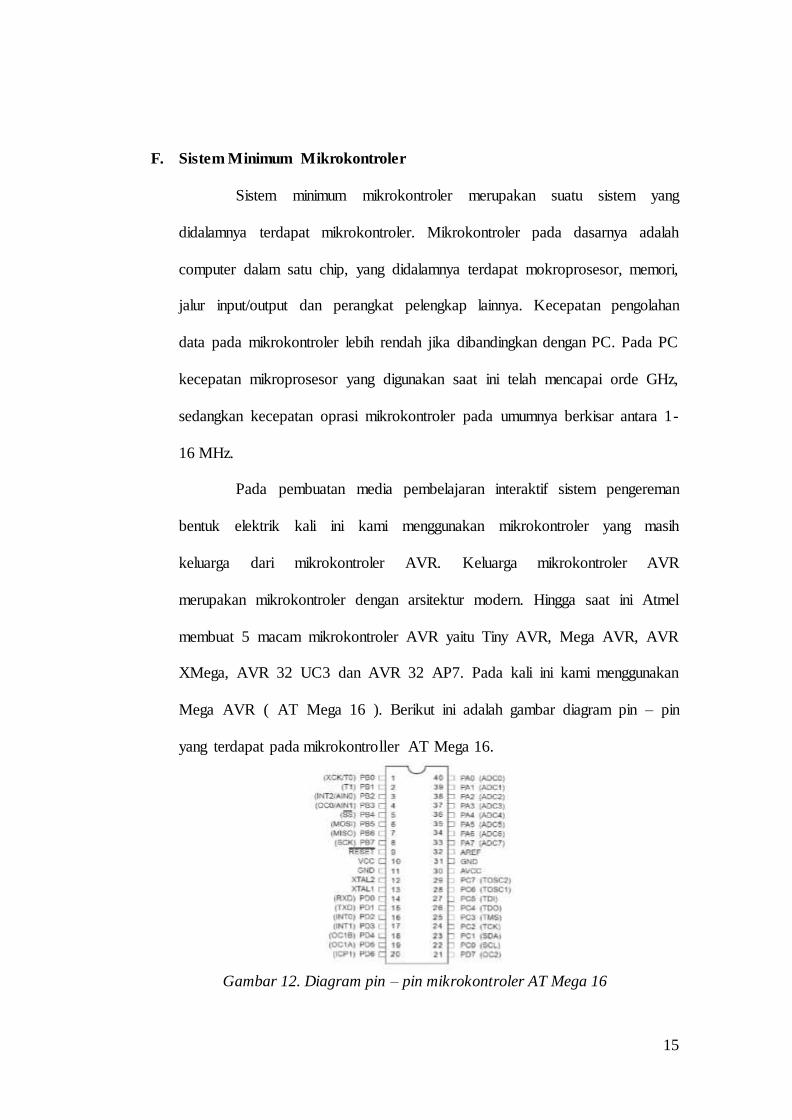
Mega AVR ( AT Mega 16 ). Berikut ini adalah gambar diagram pin – pin
yang terdapat pada mikrokontroller AT Mega 16.
Gambar 12. Diagram pin – pin mikrokontroler AT Mega 16
16
Adapun penjelasan tentang fungsi dari masing pin pada
mokrokontroler AT Mega 16 adalah sebagai berikut:
1. VCC : Sebagai sumber tegangan.
2. GND : Sebagai Ground.
3. Port A (PA7 ... PA0) : Port A berfungsi sebagai input analog
untuk A/D konverter. Selain itu sebagai I/O port 8 bit jika A/D Konverter
tidak digunakan.
4. Port B (PB7 ... PB0) : Port B berfungsi sebagai I/O port 8.
5. Port C (PC7 ... PC0) : Port C berfungsi sebagai I/O port 8.
6. Port D (PD7 ... PD0) : Port D berfungsi sebagai I/O port 8 bit.
7. RESET : Adalah masukan reset (aktif low).
8. AVCC : AVCC adalah sumber tegangan pin untuk
port A dan A/D konverter
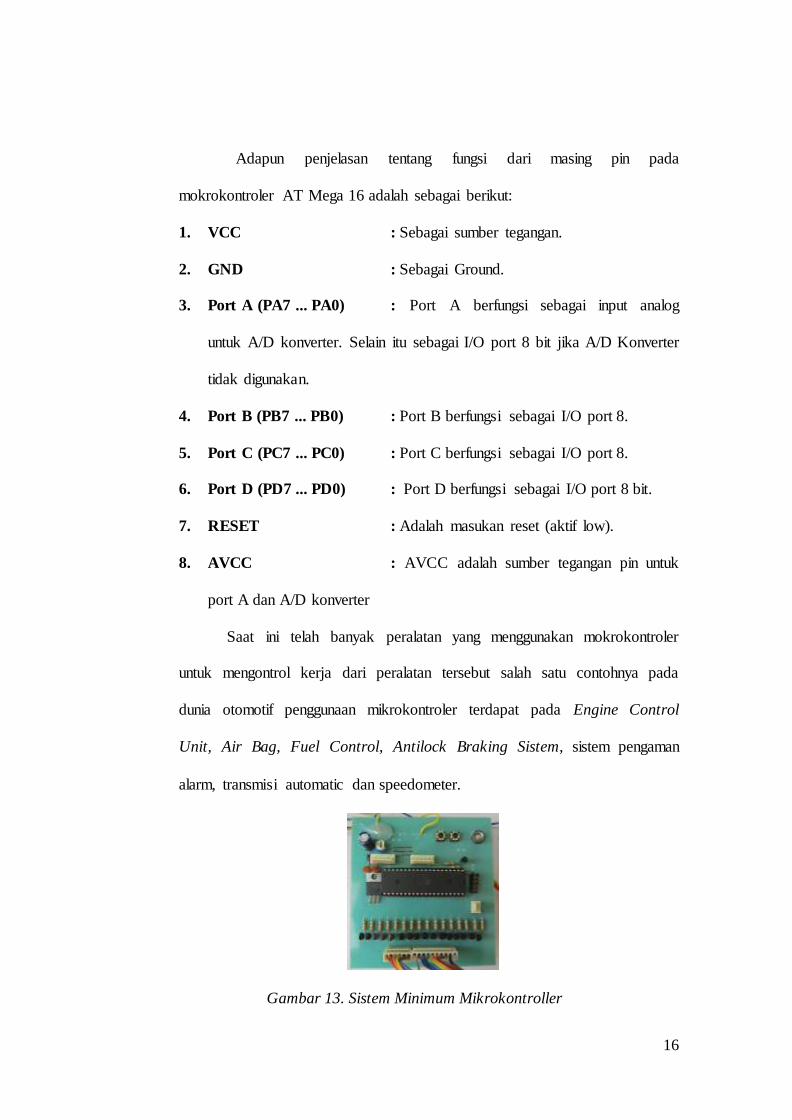
Saat ini telah banyak peralatan yang menggunakan mokrokontroler
untuk mengontrol kerja dari peralatan tersebut salah satu contohnya pada
dunia otomotif penggunaan mikrokontroler terdapat pada Engine Control
Unit, Air Bag, Fuel Control, Antilock Braking Sistem, sistem pengaman
alarm, transmisi automatic dan speedometer.
Gambar 13. Sistem Minimum Mikrokontroller
17
G. CodeVisionAVR
CodeVisionAVR merupakan salah satu software kompiler yang
khusus digunakan untuk keluarga mikrokontroler AVR. CodeVisionAVR
digunakan untuk membuat program yang kemudian program tersebut
didownload ke mikrokontroler. Meskipun CodeVisionAVR termasuk
software komersial, namun kita tetap dapat menggunakannyan dengan mudah
karena terdapat versi evaluasi yang tersedia secara gratis walaupun dengan
kemampuan yang dibatasi .
CodeVisionAVR merupakan yang terbaik bila dibandingkan dengan
kompiler – kompiler yang lain karena beberapa kelebihan yang dimiliki oleh
CodeVisionAVR antara lain :
a) Fasilitas yang disediakan lengkap (mengedit program, mengompile
program, mendownload program) serta tampilanya yang terliahat menarik
dan mudah dimengerti. Kita dapat mengatur settingan editor sedemikian
rupa sehingga membantu memudahkan kita dalam penulisan program.
b) Mampu mempercepat pembuatan kerangka program secara otomatis
dengan menggunakan fasilitas CodeWizard AVR.
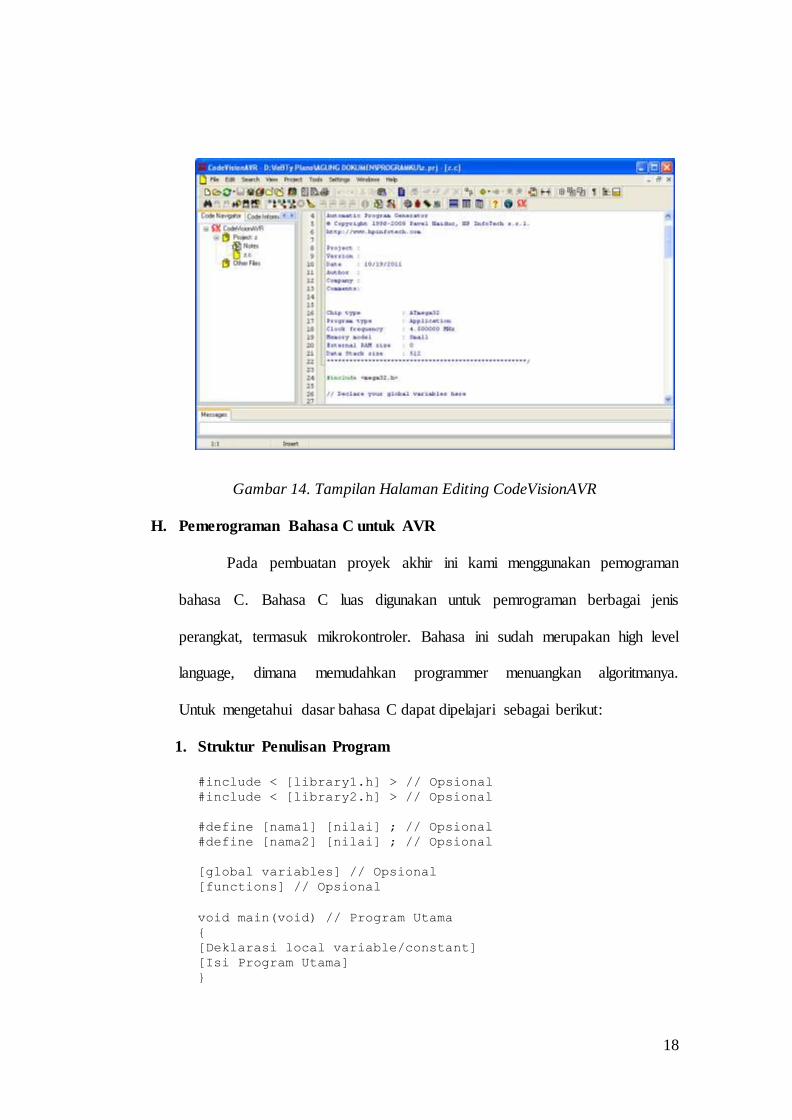
c) Memiliki faslitas untuk mendownload program langsung dari
CodeVisionAVR dengan menggunakan hardware khusus seperti Atmel
STK500 / AVRISP. Berikut ini merupakan gambar halaman editing
CodeVisionAVR.
18
Gambar 14. Tampilan Halaman Editing CodeVisionAVR
H. Pemerograman Bahasa C untuk AVR
Pada pembuatan proyek akhir ini kami menggunakan pemograman
bahasa C. Bahasa C luas digunakan untuk pemrograman berbagai jenis
perangkat, termasuk mikrokontroler. Bahasa ini sudah merupakan high level
language, dimana memudahkan programmer menuangkan algoritmanya.
Untuk mengetahui dasar bahasa C dapat dipelajari sebagai berikut:
1. Struktur Penulisan Program
#include < [library1.h] > // Opsional
#include < [library2.h] > // Opsional
#define [nama1] [nilai] ; // Opsional
#define [nama2] [nilai] ; // Opsional
[global variables] // Opsional
[functions] // Opsional
void main(void) // Program Utama
[Deklarasi local variable/constant]
[Isi Program Utama]
19
2. Statement
Statement adalah setiap operasi dalam pemrograman, harus diakhiri
dengan [ ; ] atau [ ]. Statement tidak akan dieksekusi bila diawali dengan
tanda [ // ] untuk satu baris. Lebih dari 1 baris gunakan pasangan [ /* ] dan
[ */ ]. Statement yang tidak dieksekusi disebut juga comments / komentar,
contoh :
suhu=adc/255*100; //contoh rumus perhitungan suhu
3. Deklarasi Variabel dan Konstanta
Variable adalah memori penyimpanan data yang nilainya dapat
diubah – udah. Cara penulisan variable dalam pemerograman bahasa C
adalah [tipe data] [nama] = [nilai]; contohnya adalah #define A = 1000.
Sedangkan konstanta adalah memori penyimpanan data yang nilainya
tidak dapat diubah-udah. Cara penulisan konstanta dalam pemerograman
bahasa C adalah const [nama] = [nilai]; contohnya const pi = 3.14.
20
BAB III
METODE PENELITIAN
A. Waktu dan Tempat Penelitian
1. Waktu Penelitian
Pembuatan media pembelajaran interaktif sistem pengereman
bentuk elektrik dilaksanakan mulai tanggal 20 Juni - 31 Oktober 2011.
Untuk lebih jelasnya dapat dilihat pada lampiran 1.
2. Tempat Penelitian
Pembuatan media pembelajaran sistem pengereman bentuk elektrik
dilaksanakan di bengkel mekanik jurusan teknik mesin Politeknik Negeri
Ujung Pandang.
B. Alat dan Bahan
1. Alat
Alat yang digunakan pada pembuatan media pembelajaran sistem
pengereman bentuk elektrik terdiri dari :
Mesin gerinda tangan
Mesin bor tangan
Tang rifet
Solder
Downloader
Penghisap Timah
Multitester
21
Tang potong
Tang lancip
Computer
Kikir segi empat
Kikir bulat
Kuas cat
Obeng (+ dan - )
2. Bahan
Bahan yang digunakan pembuatan media pembelajaran sistem
pengereman bentuk elektrik terdiri dari :
Aluminium kotak
Aluminium plate
Acrylic
Paku rifet
Papan PCB
Timah
Kabel
Lem lilin
Saklar
Konnektor
LED bening
Potensiometer
22
Mikro kontroller AT-Mega 16
IC Regulator
Capasitor
Dioda
Resistor
Trafo/Adaptor
Baut dan mur
C. Prosedur Penelitian
1. Langkah Pembuatan
Proses pembuatan media pembelajaran sistem pengereman bentuk
elektrik dilakukan berdasarkan pengelompokan komponen-komponennya.
Adapun langkah pembuatannya yaitu sebagai berikut:
a. Rangka
Rangka merupakan bagian utama yang digunakan sebagai
dudukan papan panel. Langkah-langkah pembuatan rangka yaitu
sebagai berikut :
1) Memotong aluminium kotak 22 x 22 mm dengan ukuran panjang
2000 mm sebanyak 2 batang sebagai tiang rangka.
2) Memotong aluminium kotak 22 x 22 mm dengan ukuran panjang
900 mm sebanyak 2 batang sebagai lebar rangka.
3) Memotong aluminium kotak 22 x 22 mm dengan ukuran panjang
600 mm sebanyak 2 batang sebagai kaki rangka.
23
4) Mengikir permukaan aluminium kotak yang telah dipotong agar
tidak tajam.
5) Menyambung aluminium kotak sebagai lebar rangka pada bagian
atas aluminium kotak sebagai tiang rangka dengan menggunakan
aluminium plate, kemudian diikat menggunakan paku refet.
6) Menyambung aluminium kotak sebagai lebar rangka di bagian
tengah aluminium kotak sebagai tiang rangka tepatnya yaitu 900
mm dari atas tiang rangka dengan menggunakan aluminium plate,
kemudian diikat menggunakan paku rifet.
7) Memasang kaki rangka pada tiang rangka agar rangka dapat
berdiri, kemudian diikat menggunakan paku rifet.
b. Papan Panel
Panel digunakan sebagai dudukan komponen – komponen media
pembelajaran sistem pengereman bentuk elektrik. Langkah – langkah
pembuatan panel yaitu sebagai berikut:
1) Memotong acrylic yang tebalnya 5 mm dengan ukuran 900 x 700
mm sebanyak 1 lembar menggunakan mesin gerinda potong.
2) Membuat gambar skema sistem pengereman pada selembar kertas
menggunakan komputer.
3) Menempel gambar tersebut pada bagian depan acrylic yang telah
dipotong sebelumnya, kemudian direkatkan menggunakan lapban.
24
4) Kemudian langkah selanjutnya melubangi acrylic tersebut sesuai
gambar yang telah dibuat sebagai tempat dudukan LED
menggunakan mesin bor tangan.
5) Memberikan keterangan pada tiap – tiap gambar komponen sistem
pengereman.
6) Mengecat bagian belakang acrylic menggunakan catspray berwarna
putih.
7) Setelah cat kering, langkah selanjutnya yaitu meletakkan LED pada
lubang – lubang yang telah dibuat, kemudian direkatkan dengan
menggunakan lem lilin.
8) Menghubungkan semua kaki (+) LED yang telah dipasang
sehingga terhubung menjadi satu.
9) Pada bagian roda, kaki (-) LED dalam baris yang sama di
hubungkan sehingga menjadi satu.
10) Kemudian kaki (-) LED baris pertama diparalel dengan kaki (-)
LED baris ke 10,19 dan 28, kaki (-) LED yang ke 2 diparalel
dengan kaki (-) LED yang ke 11,20 dan 29, begitu seterusnya
hingga kaki (-) LED yang ke 36.
11) Pada bagian pipa saluran minyak rem, 7 kaki (-) LED dihubungkan
menjadi satu.
c. Rangkaian Sistem Minimum Mikrokontroller
Rangkaian Sistem Minimum Mikrokontroller merupakan
rangkaian yang mengontrol penyalaan LED sebagai simulator sistem
25
pengereman. Adapun langkah – langkah pembuatan rangkaian Sistem
Minimum Mikrokontroller adalah sebagai berikut:
1) Membuat gambar skema rangkaian Sistem Minimum
Mikrokontroller menggunakan software Express PCB.
2) Setelah gambar selesai dibuat, selanjutnya yaitu memprint out
gambar tersebut menggunakan printer laser.
3) Memotong hasil print out seluas gambar skema Sistem Minimum
Mikrokontroler.
4) Memotong PCB seluas gambar skema Sistem Minimum
Mikrokontroler yang telah diprint out.
5) Meletakkan gambar skema Sistem Minimum Mikrokontroler ke
permukaan PCB (Permukaan gambar menghadap ke permukaan
PCB).
6) Setelah itu, bagian belakang gambar distrika hingga gambar skema
Sistem Minimum Mikrokontroler melekat pada PCB.
7) Selanjutnya yaitu membersihkan kertas yang melekat pada PCB
dengan cara merendam kedalam air dan digosok menggunakan jari
– jari tangan, sehingga yang tersisa adalah PCB dan tinta gambar
skema Sistem Minimum Mikrokontroler yang melekat pada
permukaan PCB
8) Kemudian melarut PCB menggunakan campuran cairan antara
H2O, HCl, dan H2O2 dengan perbandingan 4 : 2 : 1.
9) Membersihkan PCB dengan bensin.
26
10) Melubangi PCB menggunakan mesin bor tangan sebagai tempat
dudukan komponen.
11) Setelah PCB selesai dilubangi, langkah selanjutnya meletakkan
komponen – komponen Sistem Minimum Mikrokontroller sesuai
dengan dudukannya masing-masing.
12) Menyatukan kaki komponen – komponen Sistem Minimum
Mikrokontroller dengan tembaga yang ada pada dudukannya
masing – masing menggunakan timah yang dipanaskan
menggunakan solder.
d. Kabel konnektor
Kabel konnektor digunakan untuk menghubungkan antara
output Sistem Minimum Mikrokontroller ke LED yang ada pada papan
panel. Selain itu, kabel konnektor digunakan untuk menghubungkan
antara output Sistem Minimum Mikrokontroller ke LCD. Adapun
langkah – langkah yang dilakukan untuk membuat kabel konnektor
adalah sebagai berikut:
1) Mengupas sedikit isolator dibagian ujung – ujung kabel.
2) Memberi timah yang dicairkan oleh solder pada bagian ujung –
ujung tembaga kabel yang telah dikupas isolatornya.
3) Memasang tembaga kabel yang telah diberi timah ke konnektor pin
kemudian ditekan menggunakan tang lancip.
4) Setelah itu, langkah yang terakhir adalah memasukkan konnektor
pin yang telah menyatu dengan kabel ke dalam rumah konnektor.

27
2. Langkah Perakitan
Setelah komponen-komponen telah selesai dibuat maka selanjutnya
ketahap perakitan. Urutan proses perakitan komponen-komponen media
pembelajaran sistem pengereman bentuk elektrik yaitu sebagai berikut :
a) Memasang papan panel pada rangka, kemudian diikat menggunakan
paku rifet.
b) Memberi aluminium profil L pada setiap sudut papan panel, kemudian
diikat menggunakan paku rifet.
c) Memasang Sistem Minimum Mikrokontroller di bagian belakang papan
panel, kemudian diikat menggunakan mur dan baut.
d) Memasang adaptor di bagian belakang papan panel, kemudian
dilekatkan menggunakan lem lilin.
e) Memasang LCD
f) Memasang saklar ON/OFF
g) Memasang pedal
h) Menghubungkan output adaptor ke input Sistem Minimum
Mikrokontroller menggunakan kabel konnektor ( kutub negative
dihubungkan langsung ke Sistem Minimum Mikrokontroller, sedangkan
kutub positif melalui saklar ON/OFF terlebih dahulu).
i) Menghubungkan output Sistem Minimum Mikrokontroller ke input
LED menggunakan kabel konnektor.
j) Menghubungkan output Sistem Minimum Mikrokontroller ke input
LCD menggunakan kabel konnektor.
28
k) Menghubungkan input Sistem Minimum Mikrokontroller ke output
potensiometer.
l) Setelah itu, langkah yang terakhir adalah membuat program dan
mendownload program tersebut ke mikrokontroller yang ada pada
Sistem Minimum Mikrokontroller.
D. Prosedur Pengujian
Pengujian merupakan hal yang sangat penting karena dengan
melakukan pengujian kita dapat mengetahui apakah alat yang kita buat sudah
sesuai yang kita harapkan atau belum. Adapun langkah pengujian media
pembelajaran sistem pengereman bentuk elektrik adalah sebagai berikut :
1) Menghubungkan adaptor ke sumber tegangan AC.
2) Menekan saklar ke posisi ON.
3) Menekan pedal sambil mengamati penyalaan LED apakah sudah sesuai
dengan cara kerja sistem rem cakram hidrolik atau belum.
4) Jika sudah sesuai, kemudian mengembalikan pedal ke posisi semula.
5) Langkah selanjutnya yaitu menekan saklar ke posisi OFF.
6) Langkah yang terakhir melepaskan hubungan adaptor ke sumber tegangan
AC.
29
E. Teknik Analisis Hasil Pengujian
Setelah melakukan proses pengujian, maka diperoleh hasil pengujian
yang akan dianalisis dengan menggunakan metode perbandingan. Dimana
hasil pengujian yang diperoleh pada pembuatan media pembelajaran
interaktif sistem pengereman bentuk elektrik di bandingkan dengan sistem
rem hidrolik pada kendaraan sesungguhnya. Perbandingan ini dilakukan
dengan cara melihat apakah media pembelajaran interaktif sistem
pengereman bentuk elektrik dapat memperagakan sistem rem hidrolik pada
kendaraan sesungguhnya atau tidak.
30
Mulai
Selesai
Tidak
Ya
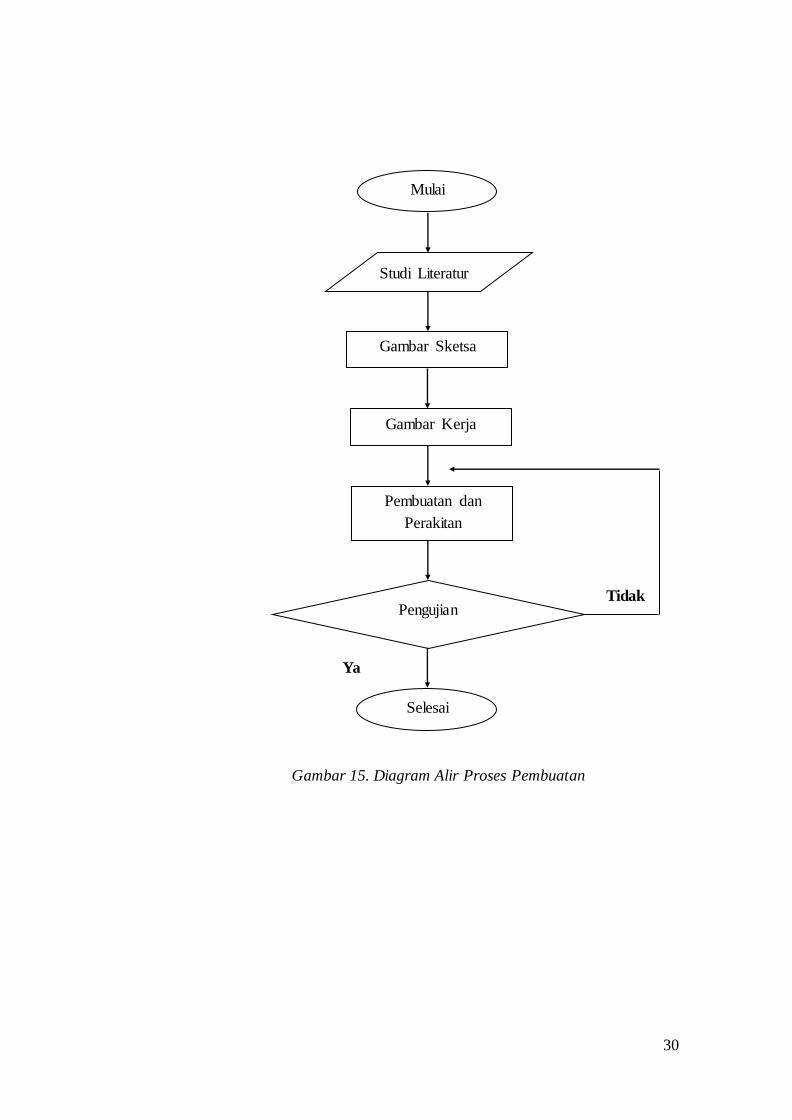
Gambar 15. Diagram Alir Proses Pembuatan
Gambar Sketsa
Gambar Kerja
Pembuatan dan
Perakitan
Pengujian
Studi Literatur
31
BAB IV
HASIL DAN PEMBAHASAN
A. Perhitungan Secara Teoritis
1. Hasil Perhitungan Daya Adaptor
Pada pembuatan media pembelajaran interaktif sistem pengereman
bentuk elektrik ini, kami menggunakan adaptor dengan tegangan output 12
Volt dan arus output 1 Amperre. Penggunaan adaptor ini berdasar pada
penggunaan IC regulator 7805. IC regulator 7805 dapat bekerja dengan
baik apabila tegangan inputnya berkisar antara 12 - 18 Volt. Untuk
menghitung daya output adaptor maka digunakan rumus sebagai berikut:
𝑃 = 𝐼 𝑥 𝑉
Dimana:
P = Daya
I = Arus
V = Tegangan
Dari komponen – komponen tersebut dilakukan perhitungan
sebagai berikut:
𝑃 = 𝐼 𝑥 𝑉
= 1 𝑥 12
= 12 𝑊𝑎𝑡𝑡
Jadi, daya output adaptor adalah 12 Watt.

32
2. Hasil Perhitungan Resistor Sebagai Pembatas Arus
LED pada umumnya menghasilkan penurunan tegangan 0,7 Volt
dan memerlukan arus berkisar antara 0.02 – 0.04 Amperre. Jika tegangan
adaptor/catu daya yang digunakan adalah 12 Volt, maka nilai resistor
yang digunakan dapat diperoleh menggunakan rumus sebagai berikut:
𝑅 =𝑉𝐶 − 𝑉𝐿𝐸𝐷
𝐼
Dimana:
R = Nilai resistor
Vc = Tegangan adaptor/catu daya
VLED = Tegangan LED
Dari komponen – komponen tersebut dilakukan perhitungan
sebagai berikut:
𝑅 =𝑉𝐶 − 𝑉𝐿𝐸𝐷
𝐼
= 12−0.7
0.02
= 565 Ω
Atau:
𝑅 =𝑉𝐶 − 𝑉𝐿𝐸𝐷
𝐼
= 12−0.7
0.04
= 282.5 Ω
Jadi nilai resistor yang dapat digunakan berkisar antara 282.5-
565Ω.
33
B. Hasil Pembuatan
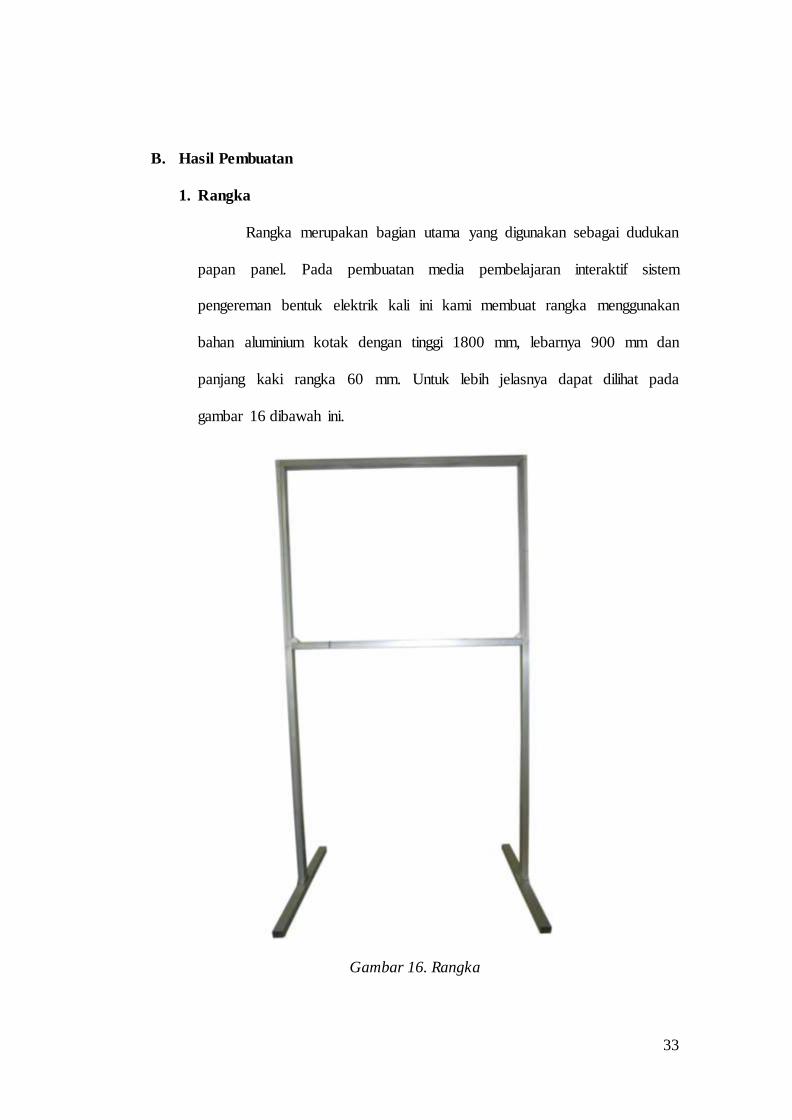
1. Rangka
Rangka merupakan bagian utama yang digunakan sebagai dudukan
papan panel. Pada pembuatan media pembelajaran interaktif sistem
pengereman bentuk elektrik kali ini kami membuat rangka menggunakan
bahan aluminium kotak dengan tinggi 1800 mm, lebarnya 900 mm dan
panjang kaki rangka 60 mm. Untuk lebih jelasnya dapat dilihat pada
gambar 16 dibawah ini.
Gambar 16. Rangka
34
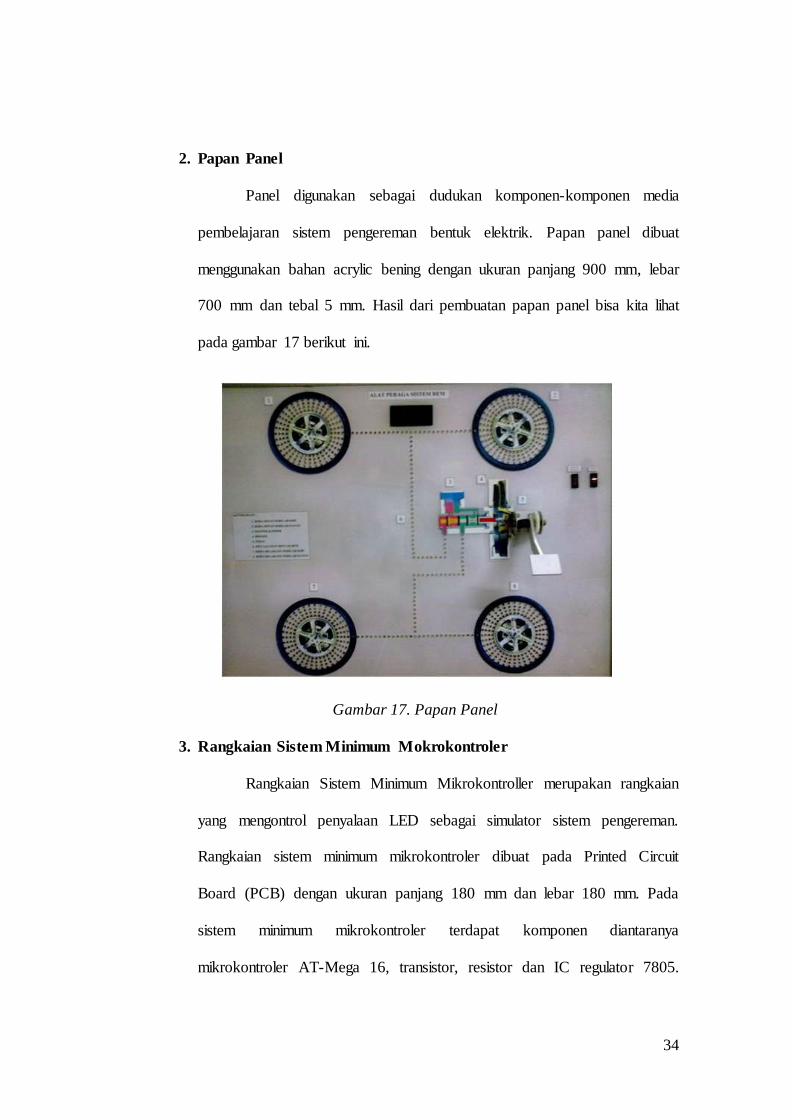
2. Papan Panel
Panel digunakan sebagai dudukan komponen-komponen media
pembelajaran sistem pengereman bentuk elektrik. Papan panel dibuat
menggunakan bahan acrylic bening dengan ukuran panjang 900 mm, lebar
700 mm dan tebal 5 mm. Hasil dari pembuatan papan panel bisa kita lihat
pada gambar 17 berikut ini.
Gambar 17. Papan Panel
3. Rangkaian Sistem Minimum Mokrokontroler
Rangkaian Sistem Minimum Mikrokontroller merupakan rangkaian
yang mengontrol penyalaan LED sebagai simulator sistem pengereman.
Rangkaian sistem minimum mikrokontroler dibuat pada Printed Circuit
Board (PCB) dengan ukuran panjang 180 mm dan lebar 180 mm. Pada
sistem minimum mikrokontroler terdapat komponen diantaranya
mikrokontroler AT-Mega 16, transistor, resistor dan IC regulator 7805.
35
Hasil pembuatan Sistem Minimum Mikrokontroler dapat dilihat pada
gambar 13.
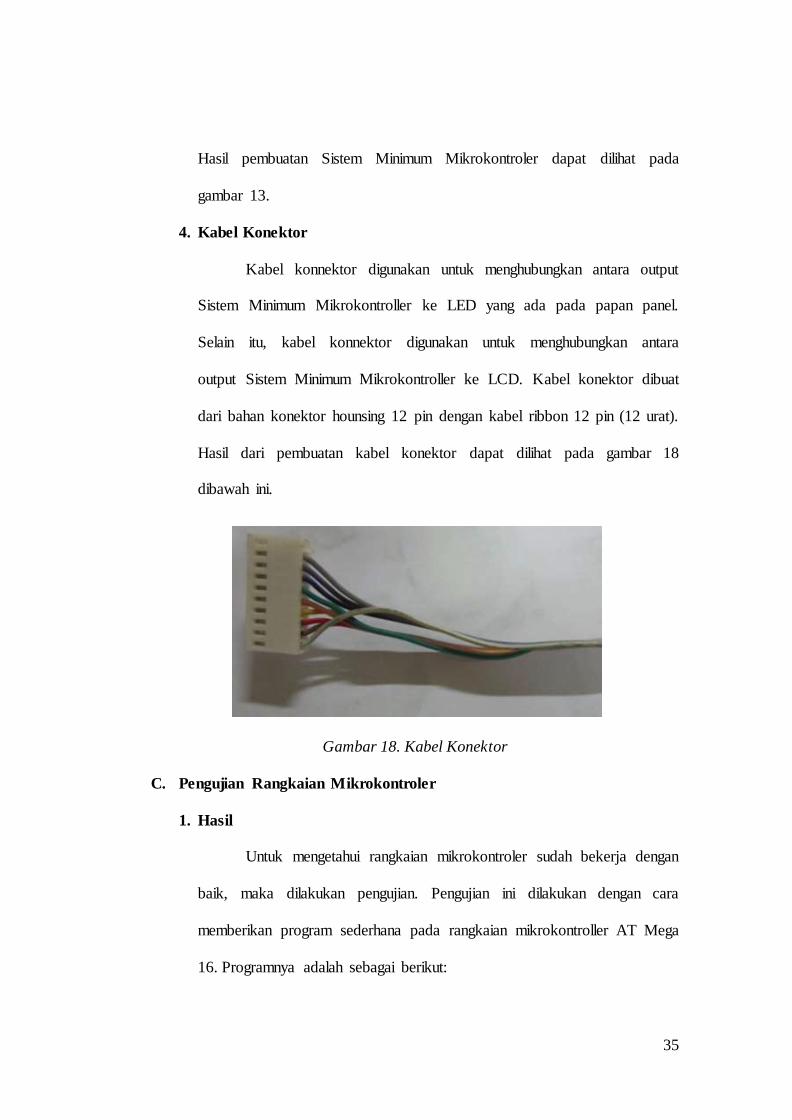
4. Kabel Konektor
Kabel konnektor digunakan untuk menghubungkan antara output
Sistem Minimum Mikrokontroller ke LED yang ada pada papan panel.
Selain itu, kabel konnektor digunakan untuk menghubungkan antara
output Sistem Minimum Mikrokontroller ke LCD. Kabel konektor dibuat
dari bahan konektor hounsing 12 pin dengan kabel ribbon 12 pin (12 urat).
Hasil dari pembuatan kabel konektor dapat dilihat pada gambar 18
dibawah ini.
Gambar 18. Kabel Konektor
C. Pengujian Rangkaian Mikrokontroler
1. Hasil
Untuk mengetahui rangkaian mikrokontroler sudah bekerja dengan
baik, maka dilakukan pengujian. Pengujian ini dilakukan dengan cara
memberikan program sederhana pada rangkaian mikrokontroller AT Mega
16. Programnya adalah sebagai berikut:
36
#include <mega16.h>
#include <delay.h> #define a 1000 void main(void)
PORTA=0x00;
DDRA=0xFF; ACSR=0x80;
while (1)
// Place your code here PORTA=0b00000001;delay_ms(a); PORTA=0b00000000;delay_ms(a);
;
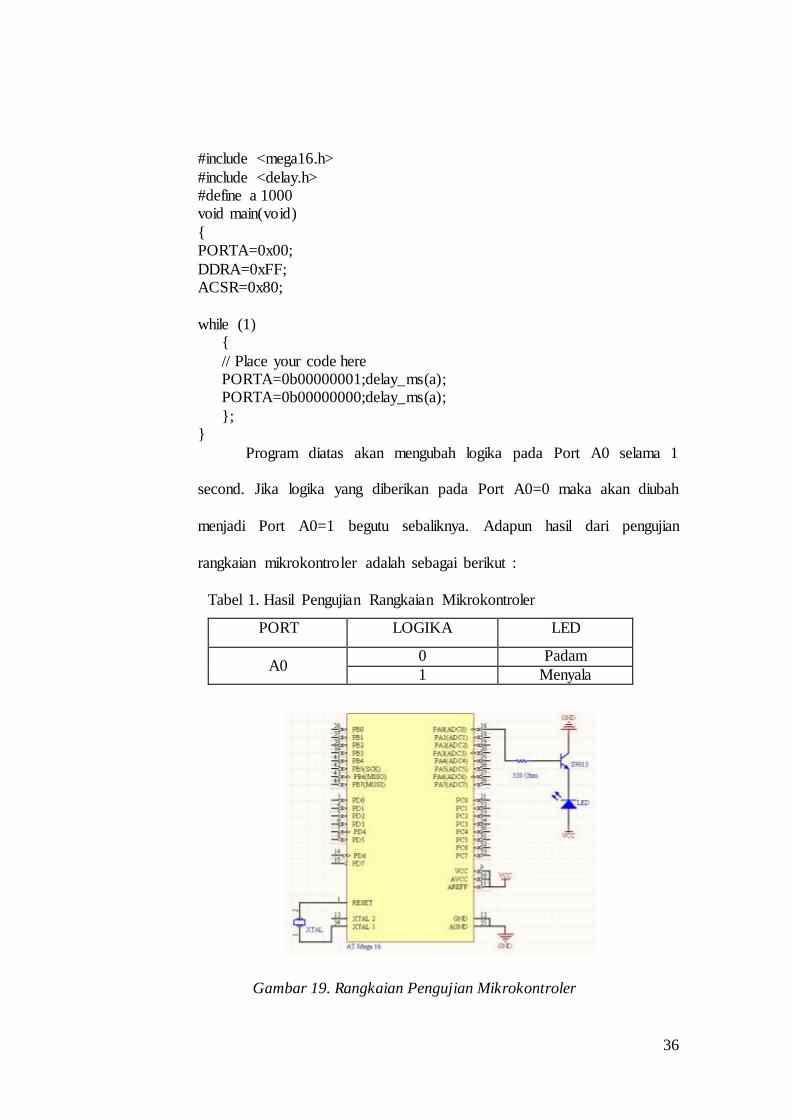
Program diatas akan mengubah logika pada Port A0 selama 1
second. Jika logika yang diberikan pada Port A0=0 maka akan diubah
menjadi Port A0=1 begutu sebaliknya. Adapun hasil dari pengujian
rangkaian mikrokontroler adalah sebagai berikut :
Tabel 1. Hasil Pengujian Rangkaian Mikrokontroler
PORT LOGIKA LED
A0 0 Padam
1 Menyala
Gambar 19. Rangkaian Pengujian Mikrokontroler
37
2. Pembahasan
Berdasarkan hasil pengujian rangkaian mikrokontroler yaitu pada
saat Port A0 berlogika 0 LED padam dan pada saat Port A0 berlogika 1
LED menyala dapat dijelaskan bahwa logika 1 pada Port A0 akan
mengaktifkan transistor sehingga LED akan menyala, sedangkan logika 0
pada Port A0 akan menonaktifkan transistor sehingga LED akan padam.
Dengan demikian program yang diberikan pada mikrokontroler akan
membuat LED berkedip secara terus-menerus. Jika LED telah berkedip
terus menerus sesuai program yang diinginkan, maka rangkaian
mikrokontroler telah berfungsi dengan baik.
D. Pengujian Rangkaian Power Supplay
1. Hasil
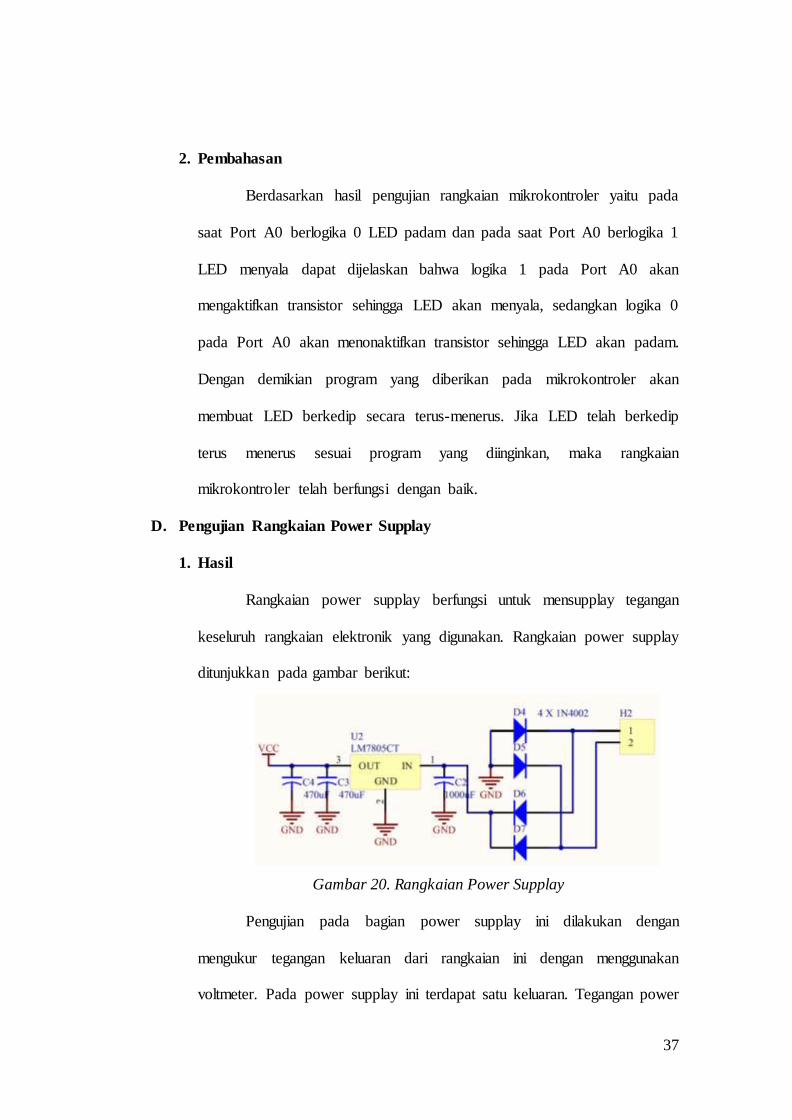
Rangkaian power supplay berfungsi untuk mensupplay tegangan
keseluruh rangkaian elektronik yang digunakan. Rangkaian power supplay
ditunjukkan pada gambar berikut:
Gambar 20. Rangkaian Power Supplay
Pengujian pada bagian power supplay ini dilakukan dengan
mengukur tegangan keluaran dari rangkaian ini dengan menggunakan
voltmeter. Pada power supplay ini terdapat satu keluaran. Tegangan power
38
supplay ini digunakan untuk mensupplay tegangan keseluruh rangkaian.
Rangkaian power supplay ini dapat dikatakan baik ketika nilai tegangan
outputnya berkisar antara 4.5 Volt sampai 5.0 Volt. Setelah melakukan
pengukuran tegangan output pada power supplay menggunakan Voltmeter
maka kami peroleh tegangan output power supplay 4.8Volt.
2. Pembahasan
Berdasarkan hasil pengujuan rangkaian power supplay diperoleh
tegangan output power supplay 4.8 Volt. Berdasarkan hasil tersebut power
suplay yang kami gunakan dapat dikatakan baik, karena masih memenuhi
standar yaitu 4.5 Volt sampai 5.0 Volt dan sudah bisa digunakan untuk
mensupplay mikrokontroler AT Mega 16 yang dapat bekerja pada
tegangan 4.0 Volt sampai tegangan 5.5 Volt.
E. Pengujian Rangkaian Liquid Cristal Display ( LCD )
1. Hasil
Fungsi dari penggunaan modul LCD ini adalah untuk menampilkan
tulisan-tulisan yang bisa berupa informasi penting ataupun status-status
yang ada. Cara pengujian terhadap modul LCD ini adalah dengan cara
mencoba menampilkan tulisan pada modul LCD. Pertama kali yang
dilakukan adalah memasukkan program pengujian modul LCD ke
Atmega16. Program untuk menampilkan tulisan pada LCD adalah dengan
meng-include-kan lcd.h pada CodeVisionAVR. Berikut ini adalah kode
inti dari program pengujian modul LCD.
39
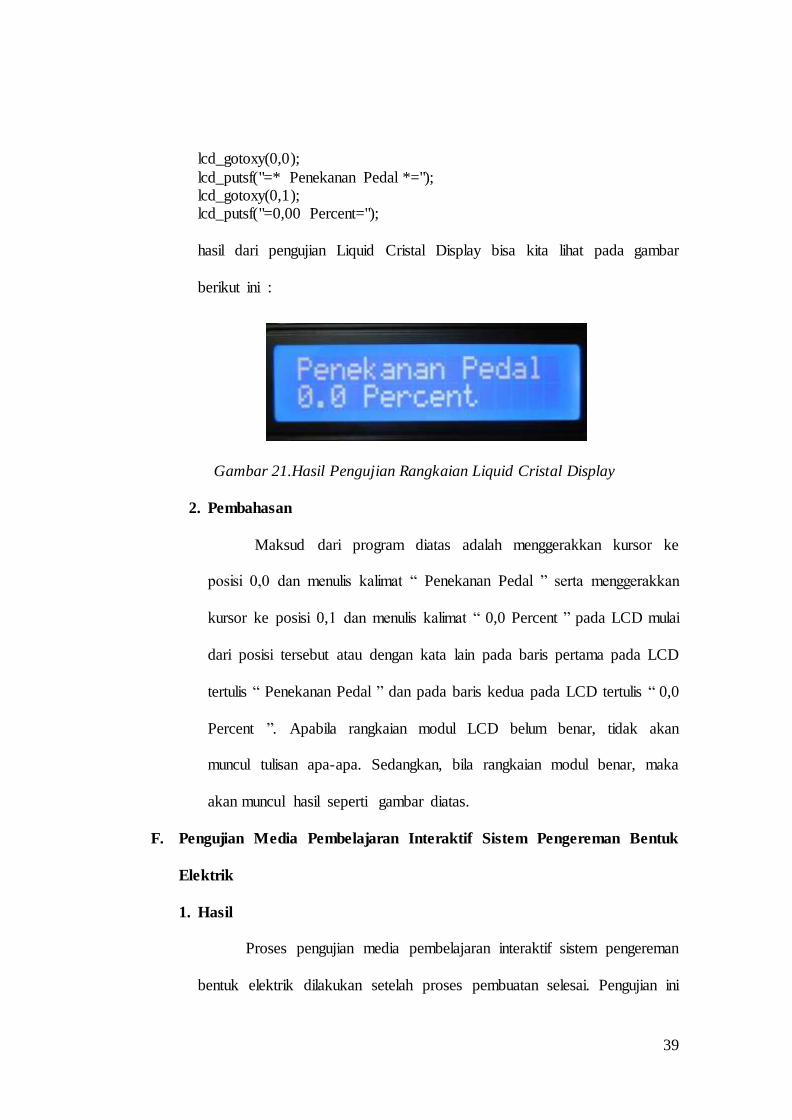
lcd_gotoxy(0,0);
lcd_putsf("=* Penekanan Pedal *="); lcd_gotoxy(0,1); lcd_putsf("=0,00 Percent=");
hasil dari pengujian Liquid Cristal Display bisa kita lihat pada gambar
berikut ini :
Gambar 21.Hasil Pengujian Rangkaian Liquid Cristal Display
2. Pembahasan
Maksud dari program diatas adalah menggerakkan kursor ke
posisi 0,0 dan menulis kalimat “ Penekanan Pedal ” serta menggerakkan
kursor ke posisi 0,1 dan menulis kalimat “ 0,0 Percent ” pada LCD mulai
dari posisi tersebut atau dengan kata lain pada baris pertama pada LCD
tertulis “ Penekanan Pedal ” dan pada baris kedua pada LCD tertulis “ 0,0
Percent ”. Apabila rangkaian modul LCD belum benar, tidak akan
muncul tulisan apa-apa. Sedangkan, bila rangkaian modul benar, maka
akan muncul hasil seperti gambar diatas.
F. Pengujian Media Pembelajaran Interaktif Sistem Pengereman Bentuk
Elektrik
1. Hasil
Proses pengujian media pembelajaran interaktif sistem pengereman
bentuk elektrik dilakukan setelah proses pembuatan selesai. Pengujian ini
40
dilakukan untuk mengetahui seberapa besar tingkat keberhasilan dari
media tersebut, apakah dapat berfungsi dengan baik sesuai dengan yang
diharapkan atau tidak.
Hasil pengujian media pembelajaran interaktif sistem pengereman
bentuk elektrik ini tidak berupa data tetapi berupa penjelasan cara kerja
media tersebut. Apakah cara kerja media tersebut sudah bisa
memperagakan proses pengereman pada kendaraan atau belum. Adapun
hasil dari pembuatan media pembelajaran sistem pengereman di bagi
menjadi 2 yaitu:
a. Saat Saklar Trouble Ditekan pada Posisi (0)
Pada saat saklar ditekan ke posisi ON maka lampu LED sebagai
tekanan minyak rem yang ada pada pipa saluran minyak rem menyala
redup dan lampu LED sebagai putaran roda menyala bergantian dengan
cepat. Kemudian saat pedal ditekan sedikit demi sedikit maka lampu
LED sebagai tekanan minyak rem pada pipa saluran minyak rem akan
menyala terang sedikit demi sedikit pula dan lampu LED sebagai
putaran roda akan menyala bergantian dengan memperlambat sedikit
demi sedikit waktu pergantiannya. Saat pedal ditekan 100% maka
lampu LED sebagai tekanan minyak rem akan menyala terang dan
lampu LED sebagai putaran roda akan menyala tidak bergantian.
b. Saat Saklar Trouble Ditekan pada Posisi (1)
Pada saat saklar ditekan ke posisi ON maka lampu LED sebagai
tekanan minyak rem yang ada pada pipa saluran minyak rem menyala
41
redup dan lampu LED sebagai putaran roda menyala bergantian dengan
cepat. Kemudian saat pedal ditekan sedikit demi sedikit maka lampu
LED sebagai tekanan minyak rem pada pipa saluran minyak rem akan
menyala terang sedikit demi sedikit pula tetapi lebih redup
dibandingkan dengan apabila saklar trouble ditekan pada posisi (0) dan
lampu LED sebagai putaran roda akan menyala bergantian dengan
memperlambat sedikit demi sedikit waktu pergantiannya tetapi waktu
perlambatannya lebih sedikit. Saat pedal ditekan 100% maka lampu
LED sebagai tekanan minyak rem akan menyala terang tetapi lebih
redup dibandingkan dengan apabila saklar trouble ditekan pada posisi
(0) dan lampu LED sebagai putaran roda tetap menyala bergantian,
tetapi sangat lambat waktu pergantiannya.
2. Pembahasan
a. Saat Saklar Trouble Ditekan pada Posisi (0)
Dari hasil pengujian diperoleh bahwa Pada saat saklar ditekan
ke posisi ON maka lampu LED sebagai tekanan minyak rem yang ada
pada pipa saluran minyak rem menyala redup, hal ini memperagakan
bahwa pada pipa saluran minyak rem sesungguhnya sudah terdapat
minyak rem di dalamnya namun, tekanannya rendah sehingga
diperagakan dengan redupnya lampu LED dan lampu LED sebagai
putaran roda menyala bergantian dengan cepat, hal ini memperagakan
perputaran roda.
42
Pada saat pedal ditekan sedikit demi sedikit maka lampu LED
sebagai tekanan minyak rem pada pipa saluran minyak rem akan
menyala terang sedikit demi sedikit pula, hal ini memperagakan bila
pedal rem pada kendaraan sesungguhnya ditekan sedikit demi sedikit
maka tekanan minyak rem akan naik sedikit demi sedikit pula. dan
lampu LED sebagai putaran roda akan menyala bergantian dengan
memperlambat sedikit demi sedikit waktu pergantiannya, hal ini
memperagakan bahwa putaran roda pada kendaraan sesungguhnya
sedang diperlambat.
Pada saat pedal ditekan 100% maka lampu LED sebagai tekanan
minyak rem akan menyala terang, hal ini memperagakan bahwa tekanan
minyak rem pada pipa saluran minyak rem sesungguhnya tinggi dan
lampu LED sebagai putaran roda akan menyala tidak bergantian,
memperagakan bahwa roda berhenti berputar.
b. Saat Saklar Trouble Ditekan pada Posisi (0)
Dari hasil pengujian diperoleh bahwa Pada saat saklar ditekan
ke posisi ON maka lampu LED sebagai tekanan minyak rem yang ada
pada pipa saluran minyak rem menyala redup, hal ini memperagakan
bahwa pada pipa saluran minyak rem sesungguhnya sudah terdapat
minyak rem di dalamnya namun, tekanannya rendah sehingga
diperagakan dengan redupnya lampu LED dan lampu LED sebagai
putaran roda menyala bergantian dengan cepat, hal ini memperagakan
perputaran roda.
43
Pada saat pedal ditekan sedikit demi sedikit maka lampu LED
sebagai tekanan minyak rem pada pipa saluran minyak rem akan
menyala terang sedikit demi sedikit pula tetapi lebih redup
dibandingkan dengan apabila saklar trouble ditekan pada posisi (0), hal
ini memperagakan bila pedal rem pada kendaraan sesungguhnya
ditekan sedikit demi sedikit maka tekanan minyak rem akan naik sedikit
demi sedikit pula tetapi tetapi tekanannya rendah karena pada sistem
pengereman terdapat kebocoran dan lampu LED sebagai putaran roda
akan menyala bergantian dengan memperlambat sedikit demi sedikit
waktu pergantiannya tetapi waktu perlambatannya lebih sedikit di
bandingkan dengan saat saklar trouble ditekan pada posisi (0), hal ini
memperagakan bahwa putaran roda pada kendaraan sesungguhnya
sedang diperlambat tetapi tidak selambat saat tidak ada trouble.
Pada saat pedal ditekan 100% maka lampu LED sebagai tekanan
minyak rem akan menyala terang tetapi lebih redup dibandingkan
dengan apabila saklar trouble ditekan pada posisi (0), hal ini
memperagakan bahwa tekanan minyak rem pada pipa saluran minyak
rem sesungguhnya tinggi tetapi tidak setinggi pada saat tidak ada
trouble dan lampu LED sebagai putaran roda tetap menyala bergantian,
tetapi sangat lambat waktu pergantiannya, ini memperagakan bahwa
roda pada kendaraan sesungguhnya tidak berhenti tetapi berputar sangat
lambat karena pada sistem pengereman terdapat trouble.
44
BAB V
PENUTUP
A. Kesimpulan
Berdasarkan uraian penjelasan pada tiap-tiap bab sebelumnya serta
setelah diselesaikannya proses pembuatan media pembelajaran interaktif
sistem pengereman, maka dapat diambil beberapa kesimpulan sebagai
berikut:
a. Sistem tekanan minyak rem pada rem hidrolik dapat diperagakan dalam
bentuk elektrik, yaitu dengan menggunakan LED yang disusun sesuai
dengan skema sistem rem hidrolik dan dikontrol dengan menggunakan
sistem minimum mikrokontroller.
b. Dengan menggunakan media pembelajaran interaktif sistem pengereman
bentuk elektrik, sebagai seorang pemula akan lebih mudah memahami cara
kerja sistem rem hidrolik tanpa melihat langsung sistem tersebut pada
kendaraan sesungguhnya.
B. Saran
a. Demi kesederhanaan media pembelajaran interaktif sistem pengereman
bentuk elektrik ini, gunakanlah adaptor camera CCTV dengan tegangan
output 12 Volt dan Arus 1 Amperre sebagai power supplay.
b. Gunakanlah rangkaian pengendali negative untuk membuat media
pembelajaran bentuk elektrik yang menggunakan banyak LED.
45
DAFTAR PUSTAKA
Kurniawan, Hadhi. 2005. Alat Peraga Pendidikan Interaktif Bersuara. Tugas Akhir, Teknik Elektro S1. Universitas Kristen Petra Surabaya.
Moh. Surya, 1992, Psikologi Pendidikan. Bandung: IKIP Bandung
Nugroho Adi, Agung. 2010. Mekatronika. Yogyakarta: Graha Ilmu.
Pakpahan, Abigain. 2009. Rem Piringan dan Booster Rem. Bandung: Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
Kependidikan Bidang Mesin dan Teknik Industri.
Sudjana, Nana. 2002. Dasar-dasar Proses Belajar Mengajar. Bandung: Sinar
Baru Algensindo
Sugiharto, Arif. 2007. Cara Kerja dan Perbaikan Rem Disc Brake. Laporan Tugas Akhir. Semarang: Universitas Negeri Semarang.
http://leoteknik.blogspot.com/2008/10/jobsheet-rem-cakramhidrolik.html
http://erpeha18.blogspot.com/2011/01/pengertian-led.html
46
LAMPIRAN
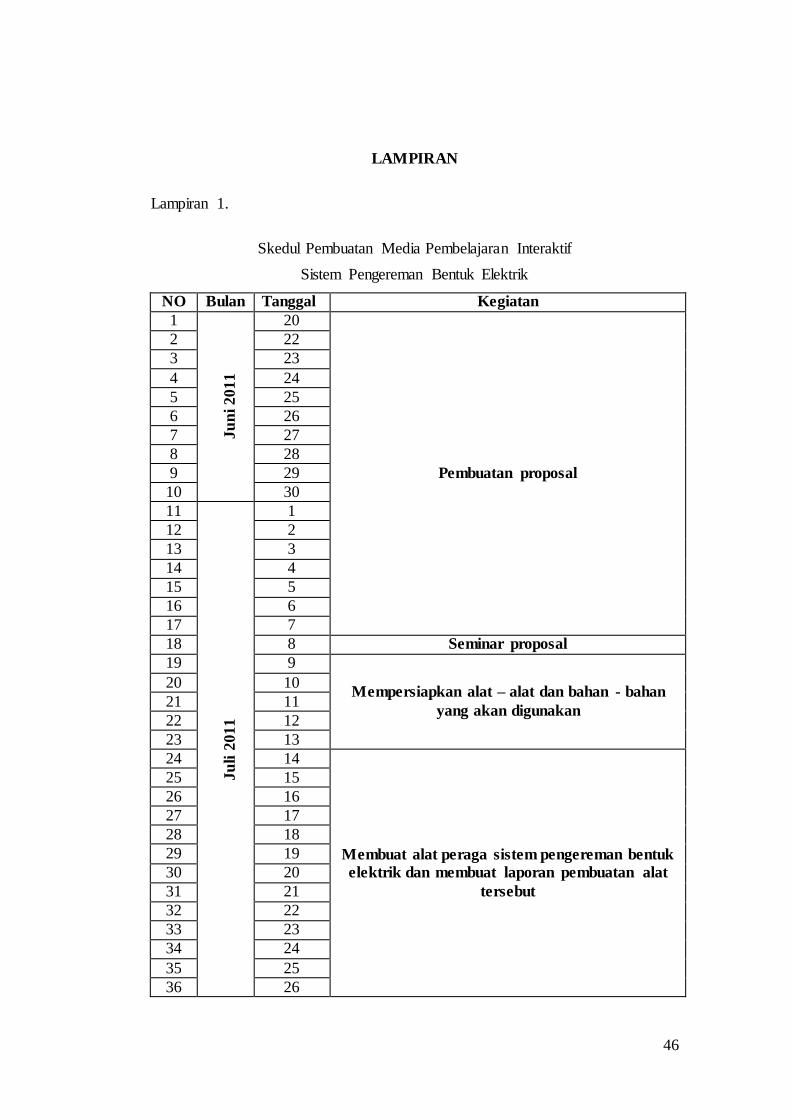
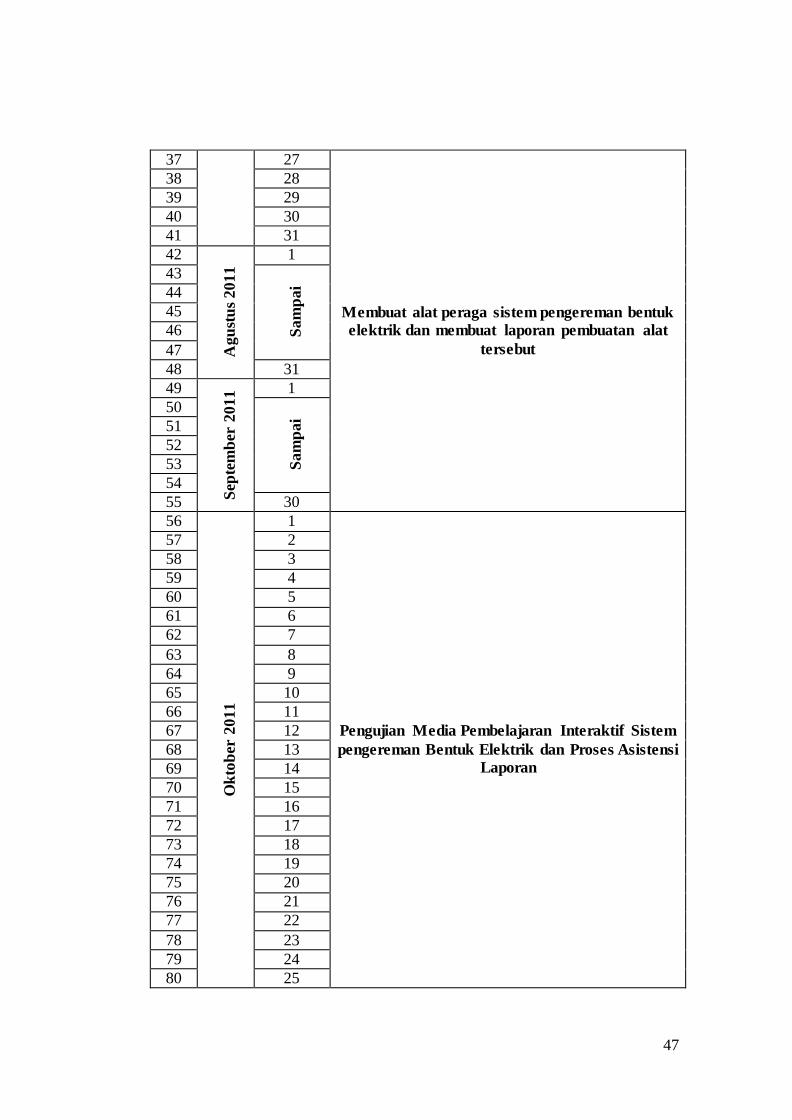
Lampiran 1.
Skedul Pembuatan Media Pembelajaran Interaktif
Sistem Pengereman Bentuk Elektrik
NO Bulan Tanggal Kegiatan
1
Ju
ni 2011
20
Pembuatan proposal
2 22
3 23
4 24
5 25
6 26
7 27
8 28
9 29
10 30
11
Ju
li 2
011
1
12 2
13 3
14 4
15 5
16 6
17 7
18 8 Seminar proposal
19 9
Mempersiapkan alat – alat dan bahan - bahan
yang akan digunakan
20 10
21 11
22 12
23 13
24 14
Membuat alat peraga sistem pengereman bentuk
elektrik dan membuat laporan pembuatan alat
tersebut
25 15
26 16
27 17
28 18
29 19
30 20
31 21
32 22
33 23
34 24
35 25
36 26
47
37 27
Membuat alat peraga sistem pengereman bentuk
elektrik dan membuat laporan pembuatan alat
tersebut
38 28
39 29
40 30
41 31
42
Agu
stu
s 2011
1
43
Sam
pai 44
45
46
47
48 31
49
Sep
tem
ber
2011
1
50
Sam
pai
51
52
53
54
55 30
56
Ok
tob
er 2
011
1
Pengujian Media Pembelajaran Interaktif Sistem
pengereman Bentuk Elektrik dan Proses Asistensi
Laporan
57 2
58 3
59 4
60 5
61 6
62 7
63 8
64 9
65 10
66 11
67 12
68 13
69 14
70 15
71 16
72 17
73 18
74 19
75 20
76 21
77 22
78 23
79 24
80 25
48
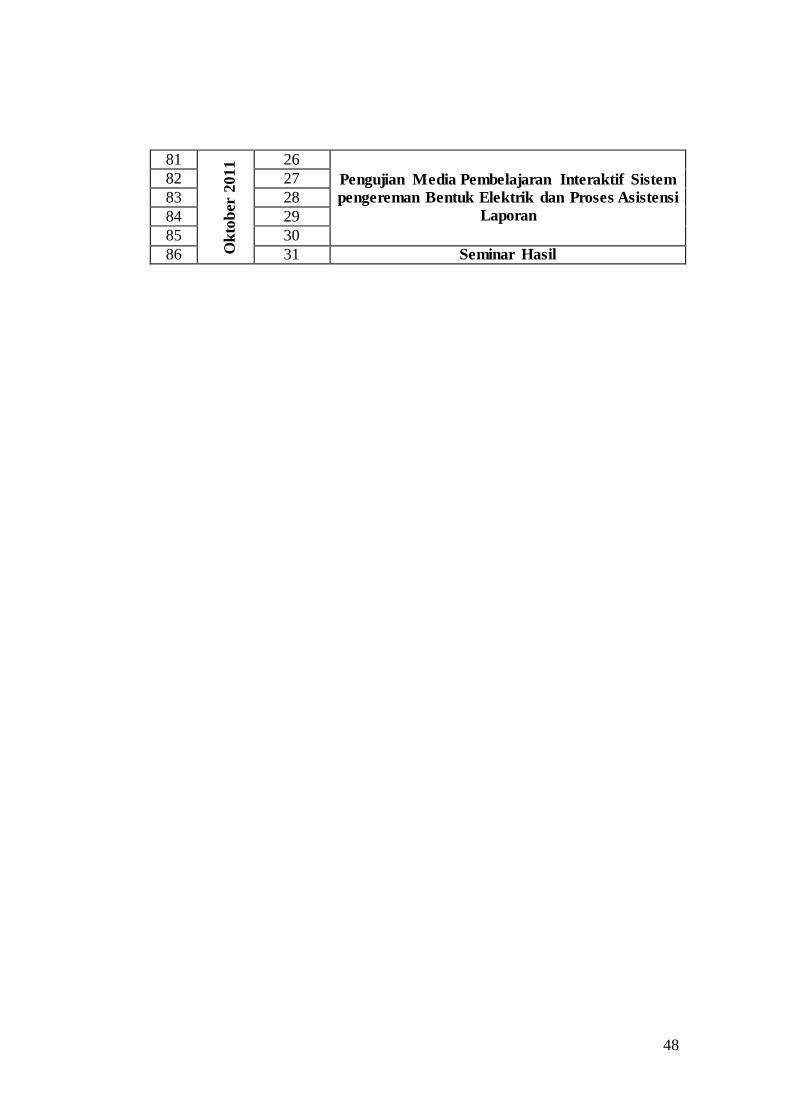
81
Ok
tob
er 2
011
26
Pengujian Media Pembelajaran Interaktif Sistem
pengereman Bentuk Elektrik dan Proses Asistensi
Laporan
82 27
83 28
84 29
85 30
86 31 Seminar Hasil
49
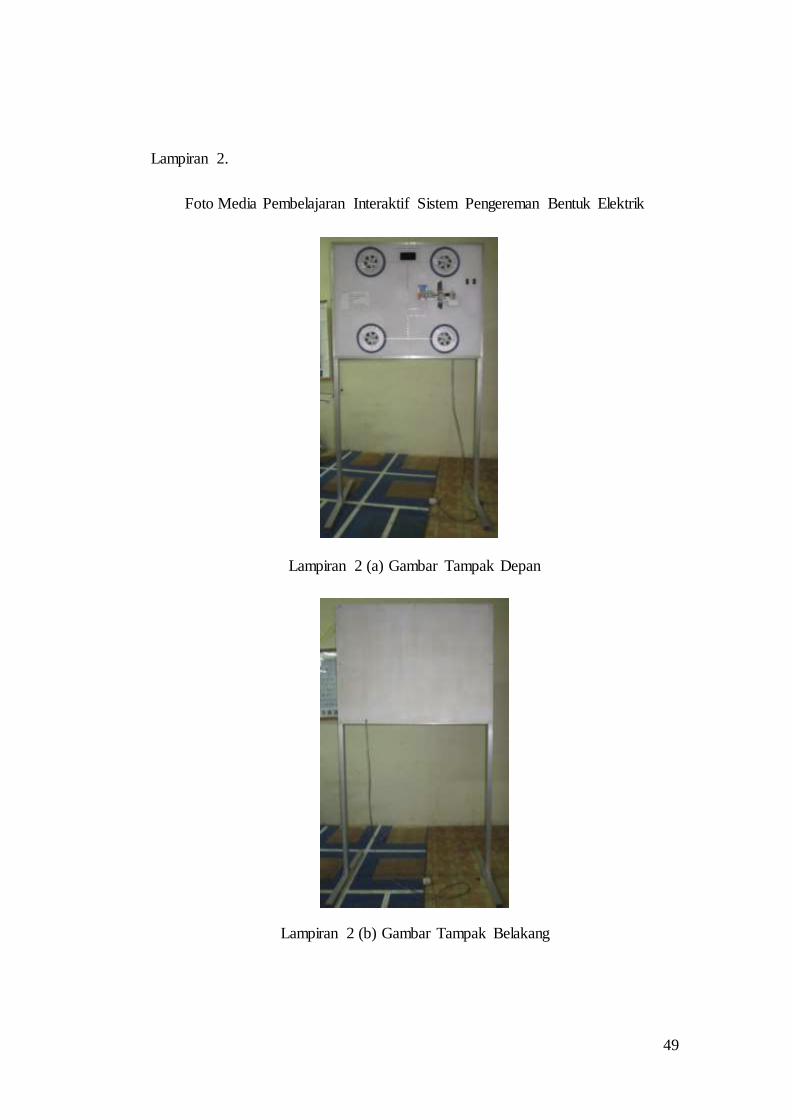
Lampiran 2.
Foto Media Pembelajaran Interaktif Sistem Pengereman Bentuk Elektrik
Lampiran 2 (a) Gambar Tampak Depan
Lampiran 2 (b) Gambar Tampak Belakang

50
Lampiran 2 (c) Gambar Tampak Samping
Lampiran 2 (d) Gambar Pedal
51
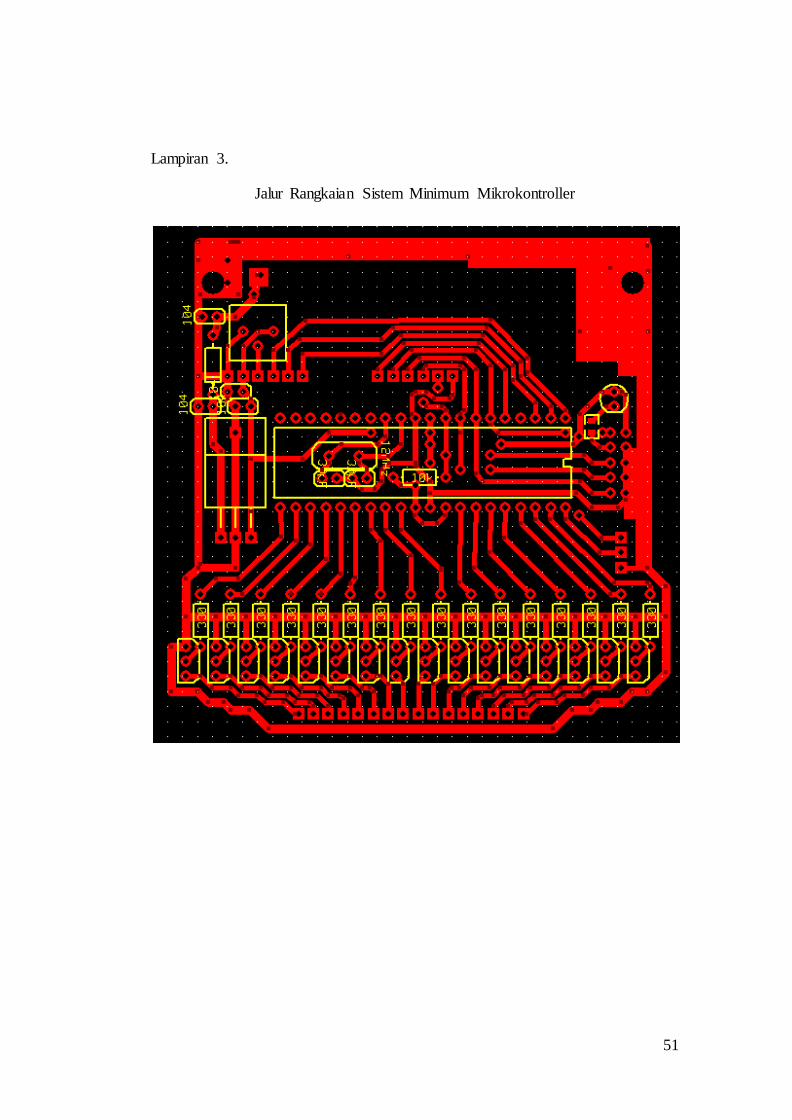
Lampiran 3.
Jalur Rangkaian Sistem Minimum Mikrokontroller
52
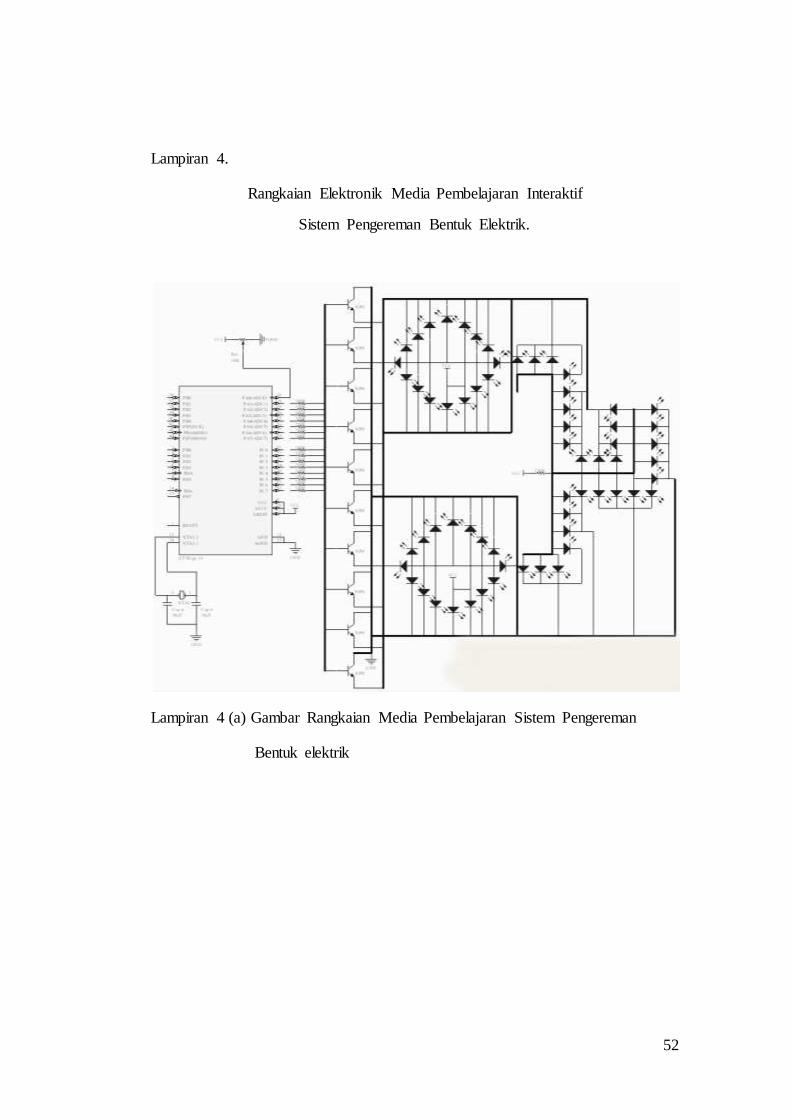
Lampiran 4.
Rangkaian Elektronik Media Pembelajaran Interaktif
Sistem Pengereman Bentuk Elektrik.
Lampiran 4 (a) Gambar Rangkaian Media Pembelajaran Sistem Pengereman
Bentuk elektrik
53
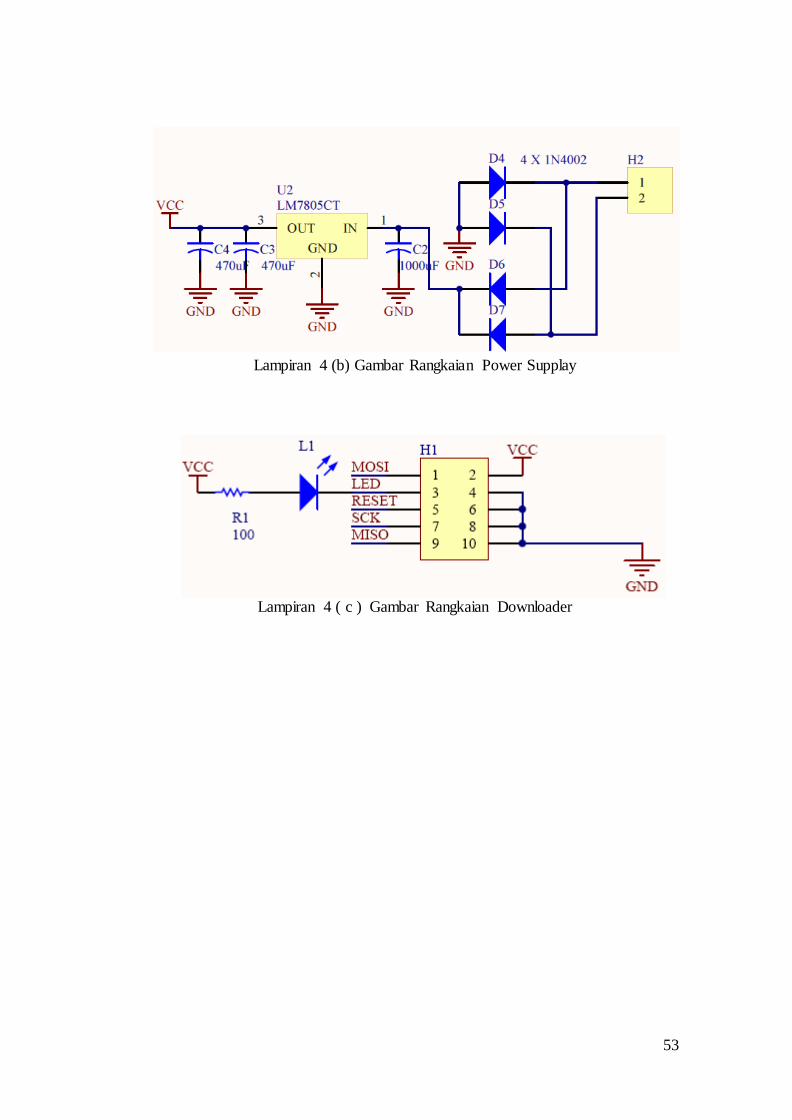
Lampiran 4 (b) Gambar Rangkaian Power Supplay
Lampiran 4 ( c ) Gambar Rangkaian Downloader