· web viewmemungkinkan untuk membangun robot dengan 3 modul yang sama agar meniru gerakan...
TRANSCRIPT
A Bio-Inspired Small-Sized Wall-Climbing Caterpillar Robot
Houxiang Zhang1, Wei Wang2,Juan Gonzalez-Gomez3 and Jianwei Zhang1
1. University of Hamburg ermany2. Beijing University of Aeronautics and Astronautics hina
3. School of Engineering, Universidad Autonoma de Madrid pain1. Pendahuluan
Climbing robot atau selanjutnya disebut robot pemanjat adalah robot yang bergerak dalam bidang vertical dan bergerak melawan gaya gravitasi. Dalam 15 tahun terakhir, penelitian terkait robot ini sudah sangat berkembang di seluruh dunia untuk aplikasi sebagai penjelajah lingkungan berbahaya dan tak berawak.
Tujuan dari makalah ini adalah untuk memaparkan tentang Bio-Inspired Small Sized Wall-Climbing Caterpillar Robot. Makalah ini mengkombinasikan teknologi pemanjatan yang terinspirasi hewan agar dapat bekerja dengan lebih fleksibel dalam lingkungan kerjanya.
2. Penelitian dan Literatur terkait
2.2 Mekanisme Pemanjatan pada caterpillar robot
Robot pemanjat adalah salah satu robot mobile. Dua hal penting yaitu prinsip adhesi dan dan kinematika mekanis.
Untuk prinsip adhesi biasanya menggunakan mekanisme sebagai berikut
1. Penghisap vakum
2. Gripper
3. Baling-baling
Untuk Kinematika mekanis telah banyak yang diteliti seperti
1. Robot multi-legged
2. Robot beroda
3. Robot Roda-rantai (Tank)
4. Robot ular ( robot tanpa kaki)
5. Robot dengan frame geser
2.3 Robot mobile bio-inspired dan metode kontrolnya
Penelitian Robot mobile bio-inspired dan metode kontrolnya
1. Robot RiES (Spenko, et al., 2008) mengadopsi pergerakan kecoa
2. BigDog (Raibert, et al., 2008) & Robot Littledog (Pongas, et al., 2007) robot berkaki 4
3. SES-2 (Ute, et al., 2002), WormBot (Conradt, et al., 2003) robot tanpa kaki
4. EPFL’s Bio-inspired Robotics Laboratory (Ijspeert, 1998). Mengadopsi jaringan neuron Central Pattern Generators (CPGs).
3. Robot Pemanjat Caterpillar dari inspirasi Biologis
3.1 Mekanisme pemanjatan Caterpillar
Caterpillar adalah pemanjat paling sukses dan dapat bermanuver dalam 3 dimensi. Terdiri dari
kepala dan leher, badan dengan beberapa segmen dan ekor. Pergerakanya tergantung pada mengembang
dan penyusutan otot. Dapat menekuk, membelit dan menyiut.
Caterpillar memiliki keuntungan sebagai berikut dalam memanjat dibanding dengan hewan lain dari
sudut pandang desain sistemnya.
1. Memiliki panjang yang bagus untuk rasio momen balik. Semakin besar rasio momen balik dari
desain mekanik robot lebih baik untuk mengetahui pelekatan yang dapat diandalkan dan
mengurangi bahaya saat memanjat.
2. Desain modular terdistribusi: Caterpillar merupakan beberapa segmen yang sama, sehingga
massa dari badan terdistribusi ke semua segmen.
Dalam paper ini kita fokus pada konfigurasi inchworm untuk alassan berikut ini
1. Inchworm menunjukan perilaku yang berbeda dari ulat biasa. Walaupun inchworm juga terdiri
dari 3 anggota badan, kepala, ekor dan batang tubuh.
2. Struktur badan yang sederhana , inchworm harus mengadaptasi perilaku sederhana untuk
bergerak.
3. Hanya ada satu modul adhesi yang menempel ke tembok saat bergerak.
3.2 Desain prototipe
Berdasarkan gerakan memanjat ulat, bagian terpenting yang diperlukan sistem pergerakan robot
dengan material yang berbeda. Dua unit mekanik diperlukan untuk mendesain mekanik yang ringan.
Sruktur dengan kemampuan daya gerak dan keamanan dan keandalan.
Di samping itu selain robot ini meniru ulat, robot ulat pemanjat harus secerdas mungkin. Agar
dapat bergerak bebas, penting untuk robot agar tidak terhubung dengan lingkungan menggunakan kabel.
Robot harus membawa semua perlengkapan seperti sumber daya, kontroler, dan komunikasi wireless.
Pada proyek ini, kita menggabungkan teknik memanjat dengan pendekatan modular. Prinsip
guncangan frekuensi rendah dan kemampuan daya gerak . Fungsi robot:
1. Mampu berjalan dan memanjat permukaan vertikal dan langit2 bangunan.
2. Kemampuan daya gerak mengangguk, menggeleng geser menyamping dan rotasi.
3. Dilengkapi sensor servo berdasar penglihatan lingkungan.
Kenyataannya ulat menggunakan penghisap pasif pada kaki mereka untuk bergerak dan memanjat.
Vacuum pada penghisap ini biasanya vakum ejector atau pompa vakum yang lebih mudah dikendalikan.
3.3 Desain modul mekanik dan realisasi konfigurasi inchworm
Untuk 2 alasan, konfigurasi inchworm adalah milestone.
1. Konfigurasi ini dasar dan sederhana sebagai robot ulat, konfigurasi lainya dapat didasarkan dari
sudut pandang mekaniknya. Contoh, robot larva dapat dibuat dengan 2 prototipe inchworm.
2. Perilaku dari robot inchworm sederhana.
Robot inchworm terdiri dari 3 modul terhubung seri untuk bergerak. Desain modulnya sama.
Memungkinkan untuk membangun robot dengan 3 modul yang sama agar meniru gerakan inchworm.
Modul pertama dan terkahir dilengkapi dengan penghisap pasif.
Satu modul tubuh termasuk sendi aktif dan modul pelekat. Modul sendi terdiri dari 2 bracket berlubang
sebuah RC servo, poros dan flange. Sebagai hasilnya penggerak dengan servo, 1 DOF rotasi ± 90°
memungkinkan 2 bracket melakukan anggukan. Bracket 1 dengan bracket 2 fixed pada shell dan sumbu
motor servo. Ketika motor berjalan, 2 bracket ini berotasi melingkari poros ditengah. Antarmuka mekanik
pada plat luar bracket memungkinkan modul sendi tersusun pada sumbu parlalel atau sumbu tegak lurus.
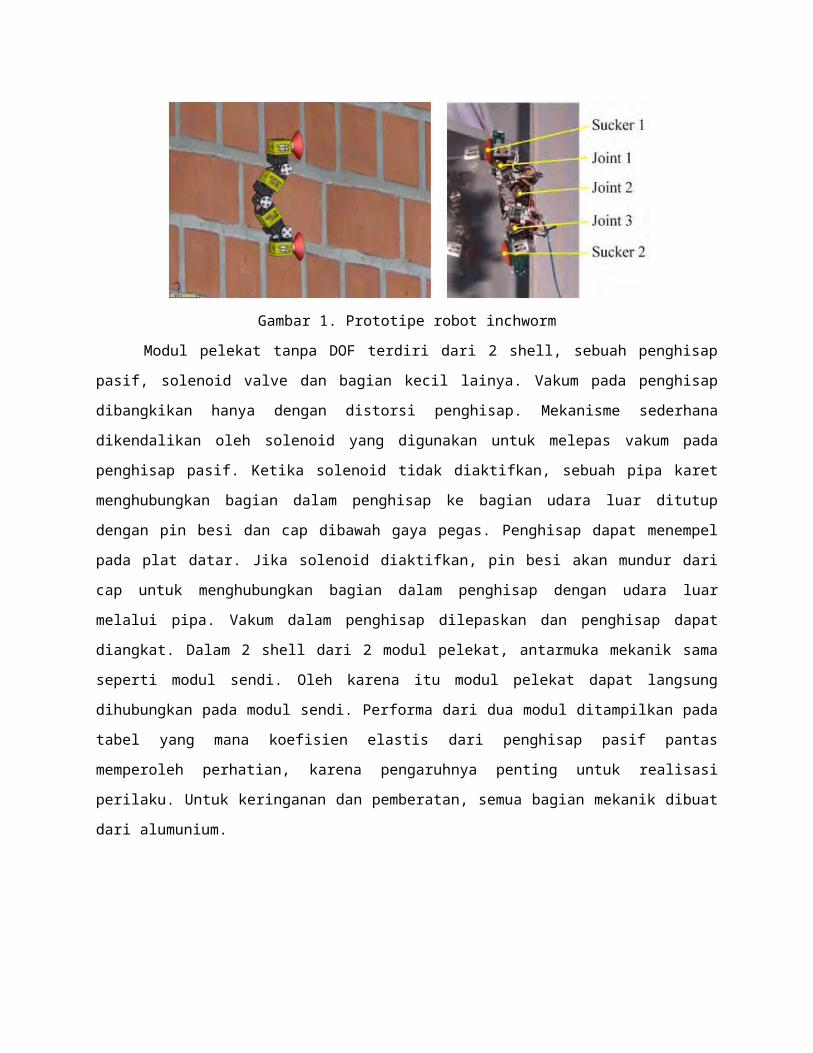
Gambar 1. Prototipe robot inchworm
Modul pelekat tanpa DOF terdiri dari 2 shell, sebuah penghisap pasif, solenoid valve dan bagian
kecil lainya. Vakum pada penghisap dibangkikan hanya dengan distorsi penghisap. Mekanisme sederhana
dikendalikan oleh solenoid yang digunakan untuk melepas vakum pada penghisap pasif. Ketika solenoid
tidak diaktifkan, sebuah pipa karet menghubungkan bagian dalam penghisap ke bagian udara luar ditutup
dengan pin besi dan cap dibawah gaya pegas. Penghisap dapat menempel pada plat datar. Jika solenoid
diaktifkan, pin besi akan mundur dari cap untuk menghubungkan bagian dalam penghisap dengan udara
luar melalui pipa. Vakum dalam penghisap dilepaskan dan penghisap dapat diangkat. Dalam 2 shell dari 2
modul pelekat, antarmuka mekanik sama seperti modul sendi. Oleh karena itu modul pelekat dapat
langsung dihubungkan pada modul sendi. Performa dari dua modul ditampilkan pada tabel yang mana
koefisien elastis dari penghisap pasif pantas memperoleh perhatian, karena pengaruhnya penting untuk
realisasi perilaku. Untuk keringanan dan pemberatan, semua bagian mekanik dibuat dari alumunium.
3.4 realisasi pengontrolan
Robor inchworm harus memiliki cukup kecerdasan untuk meniru.
1. Robot harus dapat membawa daya sendiri, dapat dikontrol dan dapat berkomunikasi secara wireless
2. Sistem harus murah atau ekonomis yang akan digunakan untuk aplikasi yang berbeda seperti
locomotion analysis( analisis penggerak) atau bio-inspired investigation.
Pada gambar 2 nampak bahawa prinsip dari pendistribusian system control, Setiap modul
memiliki kemampuan cerdas yang telah tertanam dengan controller terintegrasi independen. Semua
perintah gerak dapat dikirim ke modul tertentu secara individu atau diberikan ke semua modul melalui
bus I2C. Disisi lain, ada modul yang dapat di jadikan sebagai master dalam mengontrol semua fungsi
control seperti perencanaan jalur, navigasi, lokalisasi. Computer juga dapat digunakan sebagai user
interface melalu komunikasi I2C antara robot dan PC. PC dapat dianggap sebagai modul virtual dalam
sistem robot dan memainkan peran master atau graphic user interface (GUI). Diagram blok nya dapat
dilihat pada gambar berikut ini:
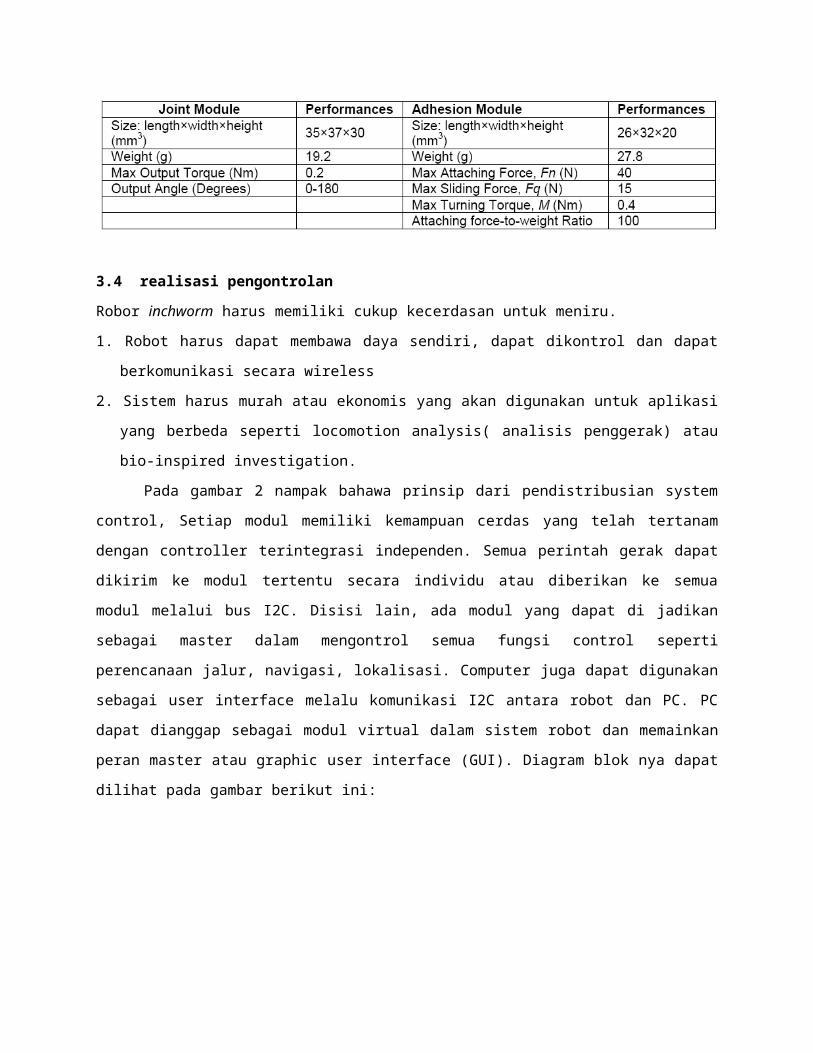
Gambar2. Control realization
Masing-masing kontroler mempunyai satu chanel output PWM untuk mengontrol servo, satu
output on-off untuk mengontrol katup solenoid, tiga input sensor analog dan digital untuk
mengumpulkan data dari sensor, satu I2C dan satu RS232 serial port. Jumlah kontroler dalam sebuah
robot ulat ditentukan oleh jumlah modul. Kontroler dapat berkomunikasi satu sama lain dengan bus I2C
dan menerima perintah dari konsol melalui port serial RS232. Selama robot bekerja, informasi tentang
state dan data sensor akan dikirm kemabali ke konsol pada waktu yang bersamaan.
4. Pergerakan dan uji coba
4.1 pengontrolan penggerak
Dalam pengontrolan robot ini, ditawarkan unsymmetrical phase method (UPM), dimana pada
metode ini menempelkan penghisap ke dinding lebih cepat dari pada mengangkat penghisap dari dinding.
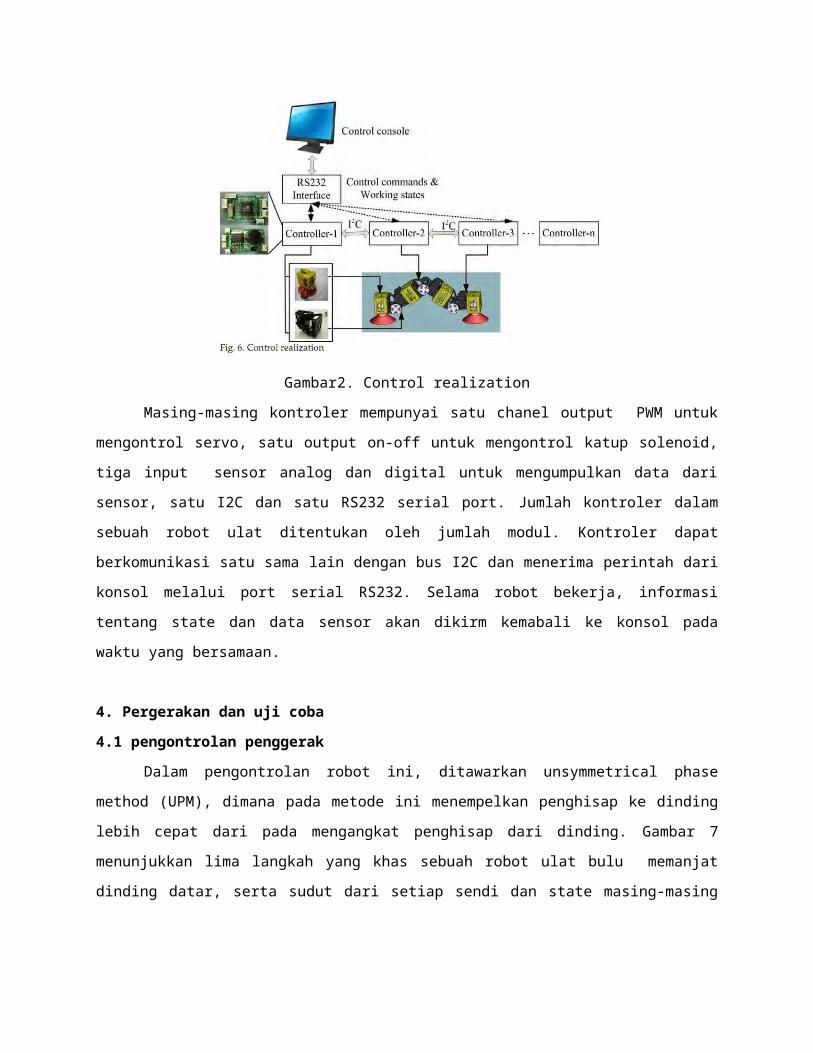
Gambar 7 menunjukkan lima langkah yang khas sebuah robot ulat bulu memanjat dinding datar, serta
sudut dari setiap sendi dan state masing-masing pengisap dalam satu siklus kontrol. Pada awal dan akhir
langkah t0 dan t4, nilai-nilai sudut dari tiga sendi adalah nol semua.
State dari penghisap dikontrol oleh sebuah solenoida yang hanya memeiliki dua state, on atau off. Pada
high level solenoid ditekan dan penghisap diangkat, dan pada low level adalah kebalikannya.
Gambar3 Pergerakan robot inchworm
Pada waktu t1, robot inchworm naik pengisap diturunkan ketika nilai sudut dari tiga sendi
memenuhi hubungan ditunjukkan pada persamaan (1). Dimana ΔθL adalah konstanta yang disebut
sebagai impact angle.
Berdasarkan persamaan (1), pengisap ini bergerak tidak hanya maju tapi juga ke dinding. Selama
waktu antara t1 dan t2, robot meletakkan pengisap dengan memutar Joint 1. Sebagaimana disebutkan di
atas, waktu antara t0 dan t1 jauh lebih lama dari waktu antara t1 dan t2, sehingga fase kontrol simetris
selama dua periode. Robot ulat bulu menggunakan impact force antara pengisap dan dinding yang
dihasilkan oleh UPM untuk kompres pengisap pasif dengan baik dan untuk menempel dengan kuat pada
dinding. Pada periode penurunan UPM, saat penghisap membuat kontak dengan dinding, gaya F yang
bekerja pada penghisap dapat dinyatakan dengan persamaan berikut.
Keterangan:
F1 merupakan gaya yang dihasilkan oleh driver sendi yang memiliki output torsi M
F2 adalah gaya oleh dorongan yang bekerja pada penghisap
I adalah inersia dari semua bagian yang bergerak
ω adalah kecepatan sudut
A adalah jarak antara pengisap yang tidak menempel dengan titik rotasi
δt adalah waktu impulse.
Nilai dari beberapa parameter pada persamaan (2) ditunjukkan di bawah ini.
Pada step t1, A sama dengan 0,13 m, M adalah 0,2 Nm dan I adalah 1,62 × 10-4 kg m2. Nilai ω dan t
dapat dicapai dalam percobaan sebeneranya, ω adalah 5.2 rad / s dan δt adalah 2 × 10-3s. Akibatnya, F1
sama dengan 1.5N dan F2 sama dengan 3.2N. Itu berarti bahwa nilai-nilai distorsi kompresi pengisap
dihasilkan oleh F1 dan F2 0.9mm dan 1.8mm berturut-turut, menurut koefisien kompresi elastis
penghisap.
Joint trajectories dapat dilambangkan dengan menggunakan rumus pada persaman dibawah ini
4.2 Test
Dalam tes ini, pertama satu pengisap dari robot inchworm adalah tetap pada dinding kaca dengan
penjepit, dan satu lagi diturunkan dan diangkat berulang-ulang. Untuk kompres pengisap dan
menurunkannya 1.5mm, ω harus mendekati 2.8rad/s, sedangkan untuk nilai kompresi maksimum hingga
3mm, ω harus mencapai 6rad/s. Karena kecepatan joint terlalu besar akan mengganggu stabilitas pengisap
yang menempel ketika robot memanjat dinding, 5,2 rad/s merupakan kecepatan sendi selama gerakan
menurunkan.
Robot dites pada permukaan kaca, dan robot dapat bergerak secara kontinyu dengan gaya
bergerak sebagaimana pada gambar 7. Dan gambar 8 menunjukan pergerakan oleh robot dengan
memanjat satu step maksimal sejauh 5mm, dan waktu yang dibuthkan dalam satu step tersebut adalah
1.8s
Gambar4. Pengetesan pada dinding kaca
5. Kesimpulan dan rencana pengembangan
Pada proyek ini hal-hal yang dapat diperoleh diantaranya:
1. Sebuah robot mendaki didasarkan pada konsep modular konfigurasi ulang. Robot dengan fitur
sederhana, struktur light mechanical dan menempel pasif.
2. Sistem kontrol terdistribusi dilengkapi desain modular. Sebuah metode penggerak UPM
memungkinkan robot untuk memanjat permukaan vertikal handal.
3. Tes terkait telah menunjukkan bahwa robot dapat mendaki dengan aman dalam model
pergerakan tertentu. Ini berarti kelayakan mekanik, rasionalitas desain dan adaptasi yang fleksibel
pada gerakan robot.