rancang bangun prototipe lift cerdas 5 lantai …digilib.unila.ac.id/55135/3/skripsi tanpa bab...
TRANSCRIPT

RANCANG BANGUN PROTOTIPE LIFT CERDAS 5 LANTAI
MENGGUNAKAN PLC OMRON CPM2A
(Skripsi)
Oleh
DIRYA ANDRIYAN
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018

ABSTRAK
RANCANG BANGUN PROTOTIPE LIFT CERDAS 5 LANTAI
MENGGUNAKAN PLC OMRON CPM2A
Oleh
Dirya Andriyan
Programmable Logic Controller (PLC) adalah perangkat kendali yang banyak
digunakan dalam dunia industri dengan menggunakan relay sebagai input dan
outputnya. Lift adalah satu alat yang dapat dikendalikan menggunakan PLC. Lift
biasa digunakan pada bangunan bertingkat sebagai alat transportasi. Kebanyakan
lift yang telah ada saat ini beroperasi secara statis tanpa mempertimbangkan
efisiensi jarak tempuh dari lift. Dengan menerapkan kecerdasan buatan pada sistem
lift maka akan diperoleh operasi lift secara dinamis. Fuzzy logic adalah salah satu
metode dalam kecerdasan buatan. Fuzzy logic akan melakukan proses penghitungan
prioritas dengan mempertimbangkan bobot inputan jarak, posisi, arah dan berat dari
lift. Perhitungan prioritas tersebut dimasukan kedalam sistem agar lift dapat
melakukan sebuah proses yang disebut dengan panggilan kembali. Proses
panggilan kembali bertujuan untuk melakukan efisiensi jarak perpindahan lift
dengan membalikkan laju lift ke posisi sebelumnya. Kemudian saat ada beberapa
input bersamaan, maka akan dipilih input yang memiliki prioritas terbesar sehingga
input tersebut dieksekusi oleh sistem. Penggunaan fungsi-fungsi pada PLC seperti
counter dan timer dapat merealisasikan pengendalian pada model lift cerdas 5 lantai
berdasarkan perhitungan dengan fuzzy logic.
Kata kunci :PLC, lift, kecerdasan buatan, fuzzy logic, prioritas.

ABSTRACT
THE DEVELOPMENT OF 5 LEVELS SMART
ELEVATOR PROTOTYPE
USING PLC OMRON CPM2A
by
Dirya Andriyan
Programmable Logic Controller (PLC) is a controlling device that has been used in
industrial engineering which uses relay as input and its output. Elevator is a tool
that can be controlled by PLC. The elevator usually used in the tall buildings as
transportation mode. Most elevators which are exist usually operated statically
without considering efficient distance from its track. By implementing artificial
intelligent in elevator system, it can be acquired a dynamic elevator operation.
Fuzzy logic is a method in artificial intelligent. Fuzzy logic will do priority
calculation process with considering values of distance, position, direction, and
weight of the elevator. That priority calculation is input in the system so the elevator
can do a process called recall. This is aimed to efficient distance by reversing
elevator’s direction to its previous position. Then, when there are several inputs at
the same time, so the input that are chosen is the one with most priority so that input
is executed by the system. Application of functions in PLC as the counter and timer
can realize full control on the model of 5 levels smart elevator based on fuzzy logic
calculation.
Keywords: PLC, elevator, artificial intelligence, fuzzy logic, priority.

RANCANG BANGUN PROTOTIPE LIFT CERDAS 5 LANTAI
MENGGUNAKAN PLC OMRON CPM2A
Oleh
Dirya Andriyan
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar
SARJANA TEKNIK
pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018



RIWAYAT HIDUP
Penulis dilahirkan di Kotabumi, pada tanggal 31 Januari 1993, sebagai
anak kedua dari lima bersaudara, dari Bapak Sudirman dan Ibu Mursiah.
Pada tahun 1998 mengikuti pendidikan di Taman Kanak–kanak (TK)
Islam Ibnurusyd sampai dengan tahun 1999, kemudian melanjutkan ke SD Islam
Ibnurusyd Kotabumi yang diselesaikan pada tahun 2005, selanjutnya ke SMP Negeri 1
Kotabumi yang diselesaikan pada tahun 2008, dan SMA Negeri 3 Kotabumi yang
diselesaikan pada tahun 2011, selain kegiatan akademik penulis juga mengisi kegiatan
non-akademik dengan aktif mengikuti organisasi internal sekolah dan pernah
diamanahkan sebagai ketua/pradana putra Pramuka dan kepala divisi mentoring Rohis.
Penulis melanjutkan pendidikannya sebagai mahasiswa Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung pada tahun 2011 melalui Seleksi Penerimaan
Mahasiswa Baru jalur undangan. Pada tahun pertama dan kedua penulis mendapatkan
beasiswa Program Hibah Kompetisi berbasis Institusi (PHKI) dari Dikti. Penulis aktif
di Himpunan Mahasiswa Teknik Elektro (Himatro) selama tiga tahun dan pernah
diamanahkan sebagai sekretaris divisi kerohanian pada tahun 2012-2013 dan Ketua
Himatro pada tahun 2013-2014. Penulis juga ikut membantu di Forum Silaturahim dan
Studi Islam (FOSSI-FT) sebagai anggota penerbitan. Penulis pernah ikut berpartisipasi
di Panitia Khusus Pemilihan Raya Fakultas Teknik dan diamanahkan sebagai ketua.
Penulis juga pernah menjadi wakil gubernur fakultas teknik pada tahun 2014-2015.
Diluar organisasi kampus unila, penulis mengikuti komunitas panahan Mechanical
Archery Club dan Komunitas Astronomi Lampung. Pada tahun 2015, penulis

melaksanakan Kerja Praktik di PT GMP (Gunung Madu Plantations) Lampung
Tengah.
Dalam bidang keilmuan dan kompetisi penulis pernah menjabat sebagai asisten
Laboratorium Kendali, Teknik Elektro dan pernah menjadi asisten praktikum dasar
sistem kendali dan sistem kendali lanjut selama dua tahun. Penulis juga berpartisipasi
dalam beberapa kompetisi seperti perlombaan Programmable Logic Controller (PLC)
di ITS pada tahun 2016 dan di PNJ pada tahun 2018. Penulis juga pernah berpartisipasi
dalam lomba panahan yang diadakan oleh Metro Archery Club dan ikut dalam
perlombaan astrofotografi yang diadakan oleh Observatorium Astronomi Itera
Lampung (OAIL).

Motto Hidup
”Sesungguhnya bersama kesulitan ada kemudahan”
”Maka apabila engkau telah selesai dari suatu urusan, tetaplah bekerja
keras untuk urusan yang lain”
”Dan hanya kepada Tuhanmulah engkau berharap”
(Q.S. Al-Insyirah)
”Orang mukmin yang paling sempurna imannya adalah yang paling baik
akhlaknya”
(H.R. At-Tirmidzi)
SANWACANA
Bismillahirrohmannirrohim,
Puji syukur penulis sampaikan kepada Allah, Alhamdulillahirobbil’alamin atas segala
nikmat yang begitu banyak diberikan oleh-Nya sehingga penulis akhirnya dapat
menyelesaikan skripsi yang berjudul “Rancang Bangun Prototipe Lift Cerdas 5
Lantai Menggunakan PLC CPM2A”. Sholawat dan salam juga penulis sampaikan
untuk panutan, pemimpin serta teladan bagi penulis yakni Rasulullah Muhammad
Shallallahu’alaihi wasallam.
Skripsi ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung. Dalam
penyusunan skripsi ini penulis telah mendapat banyak bantuan baik ilmu, petunjuk,
materi, bimbingan dan saran dari berbagai pihak. Untuk itu pada kesempatan ini penulis
ingin menyampaikan ucapan terima kasih kepada :
1. Bapak Prof. Dr. Suharno, M.Sc. selaku Dekan Fakultas Teknik Universitas
Lampung;
2. Bapak Dr.Ing. Ardian Ulvan, S.T.,M.Sc. selaku Ketua Jurusan Teknik Elektro
Universitas Lampung;
3. Bapak Dr. Herman Halomoan S,S.T.,M.T. selaku sekretaris jurusan Teknik Elektro
Universitas Lampung;
4. Bapak Emir Nasrullah,S.T.,M.T. selaku Pembimbing Utama yang telah
memberikan bimbingan, ilmu dan saran selama penyelesaian Tugas Akhir ini.
5. Bapak Agus Trisanto,Ph.D. selaku Pembimbing Pendamping yang telah
memberikan masukan serta ilmu yang berharga untuk tugas akhir ini.
6. Ibu Dr. Sri Ratna S,M.T. selaku dosen penguji yang selalu memberi pelajaran, ilmu,
dan saran dalam penyelesaian tugas akhir ini.
7. Ibu Dr. Dikpride Despa,S.T., M.T. selaku dosen pembimbing akademik.
8. Seluruh Dosen Jurusan Teknik Elektro atas segala ilmu dan wawasan yang telah
diberikan.
9. Abi, Umi, Kak Oki, Nita, Arif dan Adam atas kasih sayang, kesabaran, do’a dan
dukungan moril maupun materil yang tak pernah habis sepanjang masa.
10. Teman-teman Teknik Elektro Universitas Lampung khususnya angkatan 2011,
salam ikhlas elevENgineer.
11. Para pimpinan dan anggota Himatro, BEM-FT, FOSSI-FT, Pansus-FT pada
jamannya, juga kepada habibisme dan JOSH.
12. Sahabat seatap selama beberapa tahun the Marbrothers.
13. Teman - teman di Laboratorium Teknik Kendali dari masa ke masa.
14. Semua pihak yang telah membantu serta mendukung penulis dari awal kuliah
hingga terselesaikannya Tugas Akhir ini.
Semoga Allah SWT membalas semua amal baiknya. Penulis berharap tugas akhir ini
berguna bagi kita semua.
Bandar Lampung, 03 Desember 2018
Dirya Andriyan

Atas kehendak Allah, kupersembahkan karya kecil dan sederhana ini untuk Ayah dan Ibuku tercinta ;
Sudirman & Mursiah
(Yang telah membesarkan, menyayangi, dan mendidikku serta mencintaiku dengan setulus hati)
Tak lupa untuk saudara-saudara kandungku tersayang ;
Yachman Oktarizal Anita Eviana Putri Arif Rachman Yusuf
Adam Muchlis Ali Furqon
Semoga Allah SWT selalu merahmati Ayah, Ibu, saudaraku, serta orang – orang yang berjuang di jalan-Nya.

DAFTAR ISI
Halaman
DAFTAR ISI ....................................................................................................... i
DAFTAR GAMBAR .......................................................................................... v
DAFTAR TABEL ............................................................................................... ix
BAB I PENDAHULUAN
1.1. Latar Belakang ...................................................................................... 1
1.2. Tujuan Penelitian .................................................................................. 3
1.3. Manfaat Penelitian ................................................................................ 3
1.4. Batasan Masalah.................................................................................... 3
1.5. Hipotesis ................................................................................................ 4
1.6. Sistematika Penulisan ........................................................................... 4
BAB II TINJAUAN PUSTAKA
2.1. Programmable Logic Controller .......................................................... 6
2.1.1 Prinsip kerja PLC ........................................................................... 6
2.1.2 Bahasa Pemrograman PLC ............................................................. 10
2.1.3 Ladder Diagram ............................................................................. 11
2.1.4 Komponen-komponen dasar ladder diagram ................................ 14
2.1.5 Latching .......................................................................................... 15
2.1.6 Timer .............................................................................................. 17
iii
2.2 Lift .......................................................................................................... 18
2.2.1. Cara kerja lift ................................................................................. 20
2.3. Kecerdasan Buatan ................................................................................ 21
2.3.1. Fuzzy logic ..................................................................................... 23
2.3.2. Himpunan fuzzy ............................................................................. 26
2.3.3. Langkah-langkah perancangan fuzzy logic .................................... 29
2.4. Motor Arus Searah (DC) ....................................................................... 30
2.5. Relay Elektromagnetis .......................................................................... 32
BAB III METODE
3.1. Waktu dan Tempat Penelitian ............................................................... 34
3.2. Alat dan Bahan ...................................................................................... 35
3.3. Prosedur Kerja ...................................................................................... 35
3.3.1. Studi Literatur ............................................................................... 37
3.3.2. Penentuan Spesifikasi Rancangan ................................................. 37
3.3.3. Perancangan Perangkat Keras ....................................................... 39
3.3.4. Perancangan Perangkat Lunak ...................................................... 46
3.3.5. Pembuatan Alat ............................................................................. 59
3.3.6. Pengujian Alat ............................................................................... 59
BAB IV HASIL DAN PEMBAHASAN
4.1. Fuzzy Logic ........................................................................................... 60
4.2. Prinsip Kerja Alat ................................................................................. 63
4.3. Spesifikasi Alat ..................................................................................... 67
4.4. Pengujian ............................................................................................... 70
4.4.1. Pengujian Perangkan Keras ........................................................... 71
iv
4.4.2. Pengujian Perangkat Lunak ........................................................... 74
4.4.3. Pengujian Sistem Panggilan Kembali ........................................... 97
4.4.4. Pengujian Efisiensi Jarak Panggilan Kembali ............................... 100
BAB V KESIMPULAN DAN SARAN
5.1. Simpulan ............................................................................................... 106
5.2. Saran ..................................................................................................... 106
DAFTAR PUSTAKA
LAMPIRAN

DAFTAR GAMBAR
Halaman
Gambar 2.1 Blok diagram PLC ............................................................................. 7
Gambar 2.2 Koneksi peralatan dengan modul input PLC..................................... 7
Gambar 2.3 Koneksi peralatan dengan modul output PLC................................... 8
Gambar 2.4 Ilustrasi scanning .............................................................................. 8
Gambar 2.5 Tampilan software pemrograman CX Programmer dan ladder
diagram ............................................................................................ 9
Gambar 2.6 Contoh ladder diagram ..................................................................... 11
Gambar 2.7 Simbol-simbol dasar .......................................................................... 13
Gambar 2.8 Ladder diagram dan timing diagram dari normal contact dan normal
coil ................................................................................................... 14
Gambar 2.9 Gerbang logika dengan ladder diagram............................................ 15
Gambar 2.10 Contoh diagram tangga rangkaian latching .................................... 16
Gambar 2.11 Ladder dan timing on delay timer ................................................... 18
Gambar 2.12 Konstruksi lift .................................................................................. 19
Gambar 2.13 Struktur sistm kendali cerdas .......................................................... 22
Gambar 2.14 Bagian-bagian sistem fuzzy tipe Mamdani ...................................... 24
Gambar 2.15 Himpunan setengah baya ................................................................ 27
Gambar 2.16 Himpunan fuzzy setengah baya ....................................................... 27
vi
Gambar 2.17 Himpunan fuzzy : kelompok umur .................................................. 28
Gambar 2.18 Motor DC ........................................................................................ 31
Gambar 2.19 Relay ................................................................................................ 33
Gambar 3.1 Diagram alir penelitian ...................................................................... 36
Gambar 3.2 Rancangan kotak lift, tampak depan dan samping ............................ 37
Gambar 3.3 Rancangan keseluruhan lift, tampak samping dan depan ................. 38
Gambar 3.4 Power supply ..................................................................................... 39
Gambar 3.5 Driver motor ...................................................................................... 40
Gambar 3.6 Input dan Output yang dikendalikan oleh PLC ................................. 41
Gambar 3.7 Contoh perpindahan kotak lift ........................................................... 46
Gambar 3.8 Diagram alir fuzzy logic..................................................................... 49
Gambar 3.9 Skema proses fuzzy logic ................................................................... 50
Gambar 3.10 Fungsi keanggotaan jarak tujuan ..................................................... 50
Gambar 3.11 Fungsi keanggotaan jarak panggil kembali ..................................... 51
Gambar 3.12 Fungsi keanggotaan arah panggilan kembali yang dituju oleh kotak
lift ..................................................................................................... 51
Gambar 3.13 Fungsi keanggotaan berat kotak lift ketika diisi dengan penumpang
......................................................................................................... 52
Gambar 3.14 Fungsi keanggotaan prioritas kotak lift kembali ............................. 52
Gambar 3.15 Contoh penggunaan perhitungan fuzzy logic ................................... 55
Gambar 3.16 Tampilan muka CX Programmer .................................................... 57
Gambar 3.17 Diagram alir kerja PLC ................................................................... 58
Gambar 4.1 Peralatan lift cerdas secara keseluruhan ............................................ 70
Gambar 4.2 Box control ........................................................................................ 71
vii
Gambar 4.3 Push button panggil atas dan bawah, limit switch ............................. 72
Gambar 4.4 Driver motor ...................................................................................... 72
Gambar 4.5 Motor DC .......................................................................................... 73
Gambar 4.6 System on ........................................................................................... 78
Gambar 4.7 Contoh kondisi system on .................................................................. 78
Gambar 4.8 Contoh kondisi system off ................................................................. 79
Gambar 4.9 Limit switch berat untuk panggilan ................................................... 80
Gambar 4.10 Pintu lift open otomatis ................................................................... 80
Gambar 4.11 Pintu lift close otomatis ................................................................... 82
Gambar 4.12 Pintu lift open manual ..................................................................... 83
Gambar 4.13 Pintu lift close manual ..................................................................... 84
Gambar 4.14 Panggilan lift dari lantai 1 ke lantai 5 ............................................. 85
Gambar 4.15 Memmory lantai 1 menuju lantai 5 .................................................. 86
Gambar 4.16 Motor naik ....................................................................................... 87
Gambar 4.17 Memmory holding motor ................................................................. 88
Gambar 4.18 Program pintu otomatis ketika motor naik aktif.............................. 89
Gambar 4.19 Program pintu otomatis ketika motor berhenti ................................ 89
Gambar 4.20 Tiga kemungkinan panggilan searah lantai 1 menuju lantai 5 ........ 90
Gambar 4.21 Kondisi program motor ketika dari lantai 1 menuju lantai 5 .......... 91
Gambar 4.22 Contoh panggilan searah ................................................................. 92
Gambar 4.23 Kondisi ketika tidak ada panggilan searah ...................................... 92
Gambar 4.24 Kondisi ketika ada panggilan searah ............................................... 93
Gambar 4.25 Holding motor lantai 3 .................................................................... 93
Gambar 4.26 Pintu terbuka di lantai 5 .................................................................. 94

viii
Gambar 4.27 Contoh program panggilan kembali ................................................ 94
Gambar 4.28 Program ketika push button lantai 1 aktif ....................................... 95
Gambar 4.29 Program ketika kotak lift menyentuk limit switch lantai 3.............. 95
Gambar 4.30 Output motor naik terhenti sementara tertahan 25.05 ..................... 96
Gambar 4.31 Panggilan kembali menuju lantai 1 ................................................. 97
Gambar 4.32 Grafik perbandingan jarak tempuh panggilan kembali ................. 105

DAFTAR TABEL
Halaman
Tabel 2.1 Tabel kebenaran And OR ...................................................................... 15
Tabel 3.1 Jadwal dan aktifitas penelitian .............................................................. 34
Tabel 3.2 Pengalamatan pada pin input ................................................................ 42
Tabel 3.3 Pengalamatan pada pin output .............................................................. 43
Tabel 3.4 Pengalamatan internal memmory .......................................................... 43
Tabel 3.5 Hasil perhitungan fuzzy logic ................................................................ 56
Tabel 3.6 Kondisi yang memenuhi bobot minimal ............................................... 57
Tabel 4.1 Kondisi yang memenuhi untuk dilakukan panggilan kembali .............. 60
Tabel 4.2 Panggilan kembali yang memungkinkan pada kondisi pertama ........... 61
Tabel 4.3 Panggilan kembali yang memungkinkan pada kondisi kedua .............. 61
Tabel 4.4 Panggilan kembali yang memungkinkan pada kondisi ketiga .............. 62
Tabel 4.5 Delapan kondisi yang memungkinkan untuk dilakukan panggilan
kembali ................................................................................................. 62
Tabel 4.6 Logika yang memungkinkan dilakukan dengan lokasi lift pada lantai 1
.............................................................................................................. 74
Tabel 4.7 Logika yang memungkinkan dilakukan dengan lokasi lift pada lantai 2
.............................................................................................................. 75

x
Tabel 4.8 Logika yang memungkinkan dilakukan dengan lokasi lift pada lantai 3
.............................................................................................................. 75
Tabel 4.9 Logika yang memungkinkan dilakukan dengan lokasi lift pada lantai 4
.............................................................................................................. 76
Tabel 4.10 Logika yang memungkinkan dilakukan dengan lokasi lift pada lantai 5
............................................................................................................ 76
Tabel 4.11 Logika yang memungkinkan dilakukan ketika terjadi panggilan
kembali ............................................................................................... 77
Tabel 4.12 Pengujian panggilan kembali .............................................................. 98
Tabel 4.13 Pengujian delapan panggilan kembali................................................. 99
Tabel 4.14 Pengujian panggilan kembali lantai 1-5, limit switch lantai 3 on ..... 101
Tabel 4.15 Pengujian panggilan kembali lantai 1-5, limit switch lantai 2 on ..... 101
Tabel 4.16 Pengujian panggilan kembali lantai 5-1, limit switch lantai 3 on ..... 102
Tabel 4.17 Pengujian panggilan kembali lantai 5-1, limit switch lantai 4 on ..... 102
Tabel 4.18 Pengujian panggilan kembali lantai 1-4, limit switch lantai 2 on ..... 103
Tabel 4.19 Pengujian panggilan kembali lantai 2-5, limit switch lantai 3 on ..... 103
Tabel 4.20 Pengujian panggilan kembali lantai 5-2, limit switch lantai 4 on ..... 104
Tabel 4.21 Pengujian panggilan kembali lantai 4-1, limit switch lantai 3 on ..... 104

I. PENDAHULUAN
1.1 Latar Belakang
Programmble Logic Controller (PLC) pada dasarnya adalah sebuah komputer yang
dirancang khusus untuk mengontrol suatu proses atau mesin. PLC merupakan
perangkat kendali yang banyak digunakan dalam dunia industri dengan
menggunakan relay sebgai input dan outputnya. Salah satu aplikasi yang dapat
dilakukan menggunakan PLC adalah elevator.
Elevator atau di Indonesia di kenal dengan sebutan lift merupakan sebuah alat
transportasi vertikal yang digunakan untuk mengangkut orang ataupun barang. Lift
biasanya digunakan pada gedung-gedung tinggi bertingkat lebih dari tiga tingkat.
Lift yang ada saat ini dioperasikan dengan memberikan perintah secara langsung
kepada sistem lift sehingga sistem akan memberikan tanggapan langsung terhadap
perintah yang diberikan tersebut. Tanggapan secara langsung oleh lift akan
menjalankan lift secara statis tanpa mempertimbangkan efisiensi perpindahan lift
dari lantai ke lantai. Dengan mempertimbangkan efisiensi perpindahan lift maka
akan ada pengaturan perpindahan lift secara dinamis agar jarak yang akan dilalui
lift akan terpangkas sehingga diperoleh penghematan energi yang digunakan lift
tersebut.

2
Dari pemikiran di atas maka diperlukan sistem lift yang dapat melakukan
pengolahan perintah yang diberikan dengan mempertimbangkan efisiensi
perpindahan lift tersebut. Perpindahan lift diperhitungkan dengan
mempertimbangkan jarak tujuan yang akan dicapai oleh lift dan jarak panggilan
kembali. Sebagai contoh pada sebuah lift 5 lantai, ketika kondisi awal lift berada
pada lantai 1 hendak menuju lantai 5. Ketika lift berada pada lantai 2 tiba-tiba ada
panggilan lift untuk menuju ke lantai 1. Maka dengan contoh tersebut dapat
diperhitungkan yang pertama adalah jarak tujuan yang akan ditempuh adalah dari
lantai 1 ke lantai 5 dan yang kedua adalah jarak panggilan kembali yaitu dari lantai
2 ke lantai 1. Dengan anggapan orang yang memanggil lift pada lantai 1 akan
menuju lantai 2,3,4 ataupun 5, dimana lantai-lantai tersebut akan dilalui oleh
seseorang yang melakukan perintah dari lantai 1 menuju lantai lantai 5. Maka lift
akan memilih untuk bergerak mundur dari lantai 2 menuju lantai 1. Hal ini akan
menghemat perpindahan lift jika di bandingkan lift berpindah dari lantai 1 ke lantai
5 kemudian kembali kelantai 1 untuk melakukan perintah selanjutnya.
Percobaan akan dilakukan dengan membuat prototipe lift 5 lantai dengan
pengendali utama yang digunakan adalah PLC Omron CPM2A. Pengolahan
perintah perpindahan lift dengan mempertimbangkan jarak tujuan yang akan
dicapai dan jarak panggilan kembali akan diproses menggunakan fuzzy logic untuk
mengetahui perintah mana yang akan menjadi prioritas dan dimasukan kedalam
program PLC. Penelitian sebelumnya mengenai lift dengan pengendalinya adalah
PLC antara lain rancang bangun prototipe lift cerdas 3 lantai dengan menggunakan
PLC Omron Zen 20CIAR-A-V2 oleh Afri Yudamson.

3
1.2 Tujuan Penelitian
Adapun tujuan dari penulisan tugas akhir ini adalah :
1. Sebagai salah satu syarat untuk menyelesaikan pendidikan di Jurusan Teknik
Elektro, Universtitas Lampung.
2. Merancang prototipe lift cerdas berlantai 5 dengan PLC Omron CPM2A
sebagai pengendalinya.
3. Dapat mengaplikasikan kecerdasan buatan pada prototipe lift berlantai 5 yang
akan ditujukan pada program PLC sehingga jarak yang ditempuh oleh kotak
lift menjadi efisien.
1.3 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah akan didapatkan prototipe lift
cerdas berlantai 5 yang memiliki perpindahan yang efektif sehingga menjadi
prototipe lift yang hemat energi.
1.4 Batasan Masalah
Penelitian ini memiliki beberapa batasan sebagai berikut :
1. Prototipe lift yang dibuat tidak memiliki fungsi secara keseluruhan seperti lift
pada umumnya.
2. Program yang digunakan hanya digunakan untuk lift berlantai 5.
3. Aplikasi dari kecerdasan buatan adalah untuk pemilihan prioritas perintah yang
akan ditanggapi sistem lift.
4
1.5 Hipotesis
Kecerdasan buatan pada lift berlantai 5 yang digunakan untuk menentukan
pergerakan lift dapat membuat pergerakan lift menjadi lebih singkat sehingga akan
menghemat energi yang akan digunakan.
1.6 Sistematika Penulisan
Untuk memudahkan penulisan dan pemahaman penelitian ini maka akan dibagi
menjadi lima bab, yaitu :
BAB I PENDAHULUAN
Menjelaskan penelitian secara umum, berisi latar belakang, tujuan, manfaat,
batasan masalah, hipotesis dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Menjelaskan secara umum mengenai teori dasar yang digunakan dalam menyusun
penelitian ini.
BAB III METODELOGI PENELITIAN
Menjelaskan tahapan penelitian, diantaranya adalah waktu dan tempat penelitian,
alat dan bahan, simulasi alat, perancangan alat dan pengujian alat.
BAB IV HASIL DAN PEMBAHASAN
Menjelaskan hasil pengujian dari percobaan dan membahas data-data hasil
pengujian yang diperoleh.

5
BAB V KESIMPULAN DAN SARAN
Memuat simpulan yang diperoleh dari pembuatan dan pengujian alat dan saran-
saran untuk pengembangan lebih lanjut.
DAFTAR PUSTAKA
LAMPIRAN

II. TINJAUAN PUSTAKA
2.1 Programmable Logic Controller (PLC)
PLC pada dasarnya adalah sebuah komputer yang dirancang khusus untuk
mengontrol suatu proses atau mesin. PLC bekerja secara digital dan memiliki
memory yang dapat diprogram, menyimpan perintah-perintah untuk melakukan
perhitungan-perhitungan aritmatika yang relatif kompleks, fungsi komunikasi,
dokumentasi dan lain sebagainya. Didalam PLC berisi rangkaian elektronika yang
berfungsi sebagai contact relay yang dapat diatur dalam keadaan normaly open
ataupun normaly close. Kontak-kontak ini berupa pin input dan pin output ataupun
memory yang terdapat pada PLC.
2.1.1 Prinsip Kerja PLC
Secara umum, PLC terdiri dari dua komponen penyusun utama
• Central Processing Unit (CPU)
• Sistem antarmuka input/output
Pada dasarnya, operasi PLC relatif sederhana. Peralatan luar dikoneksikan melalui
modul input dan output. Peralatan luar yang dapat terhubung antara lain dapat

7
berupa sensor-sensor analog, limit switch, push button, saklar sebagai inputnya dan
motor, selenoid, lampu sebagai outputnya.
Gambar 2.1. Blok diagram PLC
Fungsi dari CPU adalah untuk mengatur segala proses yang terjadi didalam PLC.
Ada tiga komponen utama penyusun CPU ini antara lain sebagai berikut :
• Processor
• Memory
• Power Supply
Gambar 2.2. Koneksi peralatan dengan modul input PLC
8
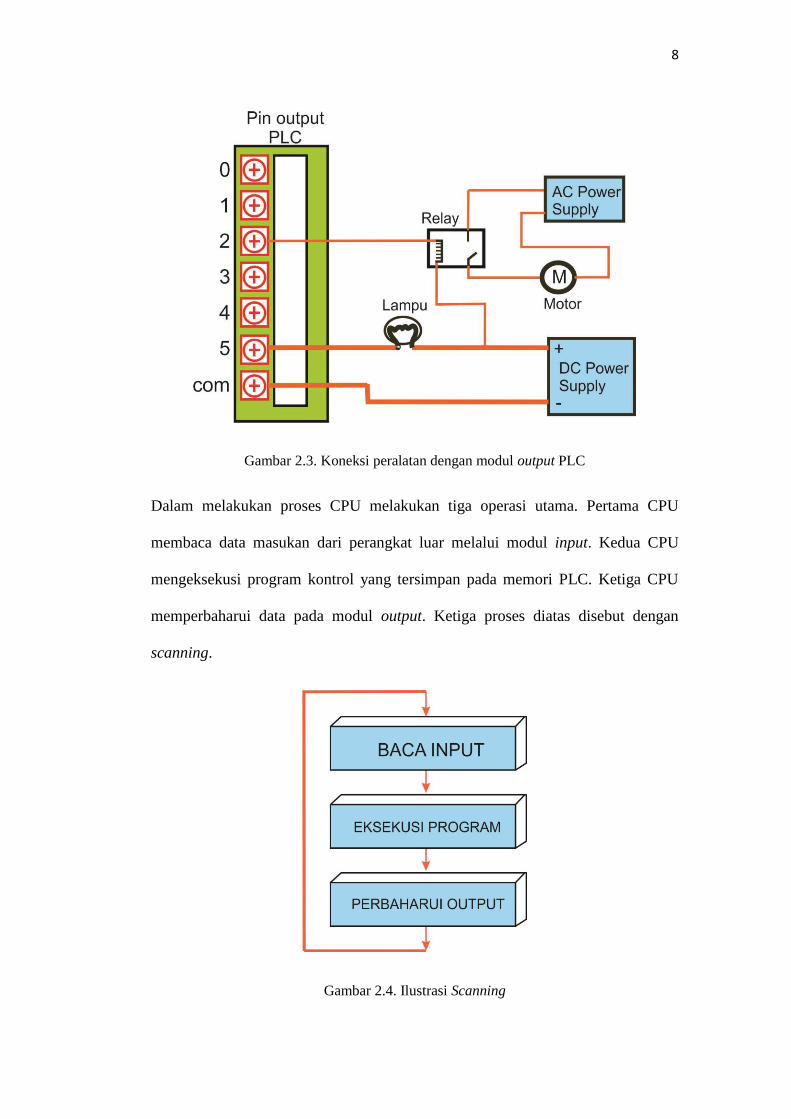
Gambar 2.3. Koneksi peralatan dengan modul output PLC
Dalam melakukan proses CPU melakukan tiga operasi utama. Pertama CPU
membaca data masukan dari perangkat luar melalui modul input. Kedua CPU
mengeksekusi program kontrol yang tersimpan pada memori PLC. Ketiga CPU
memperbaharui data pada modul output. Ketiga proses diatas disebut dengan
scanning.
Gambar 2.4. Ilustrasi Scanning

9
Untuk melakukan pemrograman pada PLC dapat dilakukan dengan menggunakan
perangkat pemrograman yaitu miniprogrammer/console atau menggunakan
komputer melalui software yang menyertainya. Misalnya pada software CX
programmer digunakan untuk memrogram PLC produksi Omron, KGL untuk PLC
produksi LG dan sebagainya. Dibandingan dengan menggunakan
miniprogrammer/console, komputer lebih banyak digunakan untuk melakukan
pemrograman PLC karena lebih memudahkan programmer untuk melakukan
simulasi ataupun melakukan editing program. Console biasanya digunakan untuk
editing saja sehingga cocok digunakan saat dilakukan maintenance PLC.
Pemrograman PLC dengan menggunakan console biasanya dilakukan dengan
menggunakan kode mnemonic seperti OR, NOT, AND dan sebagainya. Sedangkan
pemrograman melalui komputer dilakukan dengan menggunakan teknik standar
pemrograman sekuensial, yaitu diagram ladder.
Gambar 2.5. Tampilan software pemrograman CX Programmer dan ladder diagram
Software PLC yang digunakan pada komputer dilengkapi dengan fasilitas
monitoring, komunikasi ataupun simulasi. Program yang dibuat melalui software
tersebut dapat ditransfer kedalam PLC melalui modul komunikasi yang tersedia

10
pada PLC. Pada umumnya modul komunikasi yang digunakan adalah port serial
COM.
2.1.2 Bahasa Pemrograman PLC
Dalam melakukan pemrograman PLC, ada beberapa metode yang dapat digunakan
yang telah distandarisasi oleh IEC (International Electrical Commission).
1. List Instruksi (Instruksi List), pemrograman dengan menggunakan
instruksi-instruksi bahasa level rendah (mnemonic), contoh : LD/STR,
NOT, AND, OR dan sebagainya.
2. Diagram Blok Fungsional (Function Block Diagram), pemrograman
berbasis aliran data secara grafis. Biasa digunakan dalam proses kontrol
yang melibatkan perhitungan-perhitungan kompleks dan akuisisi data
analog.
3. Diagram Fungsi Sekuensial (Sequensial Function Charts), metode
pemrograman terstruktur secara grafis yang banyak melibatkan langkah-
langkah rumit, contoh pada bidang robotika, batch control, dan sebagainya.
4. Teks Terstruktur (Structured Text), pemrograman ini menggunakan
statemen-statemen yang umum dijumpai pada bahasa level tinggi (high level
programming) contoh : if/then, case, for/next, do/while, dan lain
sebagainya.
5. Diagram Ladder (Ladder Diagram), pemrograman berbasis logika relay
yang cocok digunakan pada permasalahan-permasalahan kontrol diskret
yang input/outputnya memiliki dua kondisi yaitu on atau off seperti pada
sistem lift, konveyor, motor-motor dan sebagainya.

11
Dalam pengaplikasiannya dari lima metode yang ada dan dapat digunakan dalam
PLC, banyak yang menggunakan diagram ladder sebagai bahasa utama dalam
pemrogrammannya. Diagram ladder banyak digunakan karena mudah dipahami
dan lebih familiar. Diagram ladder juga mudah dipahami karena menggunakan
simbol-simbol komponen tertentu [1].
2.1.3 Ladder Diagram
Ladder Diagram merupakan metode pemrograman PLC yang paling populer, hal
ini terjadi karena PLC pertama yang dibuat menggunakan bahasa ladder. Istilah
ladder ini muncul karena bentuk bahasanya mirip dengan tangga.
Berikut ladder diagram sederhana menggunakan software CX Programmer :
Gambar 2.6. Contoh Ladder Diagram
Dapat dilihat pada gambar diatas bahwa ada bagian-bagian utama seperti bagian
contact (input) dan coil (output). Bagian rung berisi komponen-komponen ladder
diagram yang diapit oleh power rail dan neutral rail, dua jalur yang dapat
menggambarkan aliran program seperti layaknya aliran arus listrik. Untuk
pengalamatan pada pemrograman berbeda-beda, tergantung dari produk atau merk

12
PLC yang digunakan. Pada dasarnya pengalamatan digunakan untuk mewakili
input ataupun output yang digunakan.
Dalam software CX programmer aturan pengalamatan yang digunakan untuk input
dan output adalah sebagai berikut:
Input : 0.00 Output : 10.02
Pengalamatan pada CX Programmer untuk input diawali dengan kode 0 dilanjutkan
dengan dua digit angka yang merepresentasikan port input yang digunakan pada
PLC. Sedangkan pengalamatan untuk output diawali dengan kode 10,11,12.. dan
diikuti dua digit setelahnya direpresentasikan sebagai port output yang digunakan
pada PLC.
Dari gambar contoh ladder diagram diatas juga ada hal-hal yang perlu diperhatikan,
diantaranya adalah :
• Dibaca dari kiri kekanan, dari atas ke bawah.
• Tiap rung tidak bisa diakhiri dengan lebih dari satu output.
• Output dan input ditampilkan dalam kondisi tidak dienergized
• Input/output diidentifikasi melalui alamatnya [2].
Melakukan pemrograman PLC dengan menggunakan ladder diagram sama halnya
dengan menggambarkan sebuah rangkaian pensaklaran. Diagram-diagram tangga
terdiri dari dua garis vertikal yang merepresentasikan rail-rail daya, yaitu power rail
dan neutral rail. Komponen-komponen rangkaian dihubungkan sebagai garis-garis
horisontal yang berupa anak-anak tangga diantara dua garis vertikal.
13
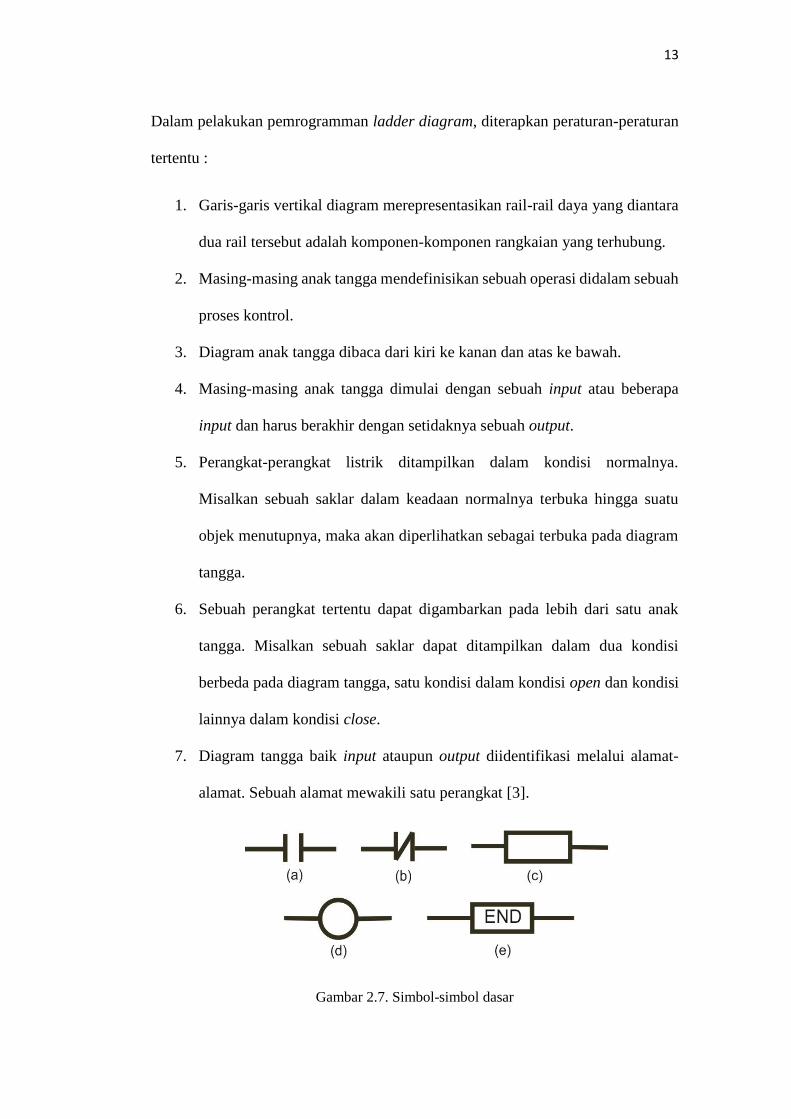
Dalam pelakukan pemrogramman ladder diagram, diterapkan peraturan-peraturan
tertentu :
1. Garis-garis vertikal diagram merepresentasikan rail-rail daya yang diantara
dua rail tersebut adalah komponen-komponen rangkaian yang terhubung.
2. Masing-masing anak tangga mendefinisikan sebuah operasi didalam sebuah
proses kontrol.
3. Diagram anak tangga dibaca dari kiri ke kanan dan atas ke bawah.
4. Masing-masing anak tangga dimulai dengan sebuah input atau beberapa
input dan harus berakhir dengan setidaknya sebuah output.
5. Perangkat-perangkat listrik ditampilkan dalam kondisi normalnya.
Misalkan sebuah saklar dalam keadaan normalnya terbuka hingga suatu
objek menutupnya, maka akan diperlihatkan sebagai terbuka pada diagram
tangga.
6. Sebuah perangkat tertentu dapat digambarkan pada lebih dari satu anak
tangga. Misalkan sebuah saklar dapat ditampilkan dalam dua kondisi
berbeda pada diagram tangga, satu kondisi dalam kondisi open dan kondisi
lainnya dalam kondisi close.
7. Diagram tangga baik input ataupun output diidentifikasi melalui alamat-
alamat. Sebuah alamat mewakili satu perangkat [3].
Gambar 2.7. Simbol-simbol dasar
14
Keterangan :
(a) Kontak input normal terbuka
(b) Kontak input normal tertutup
(c) Sebuah instruksi khusus
(d) Perangkat output
(e) Anak tangga akhir
2.1.4 Komponen-komponen dasar Ladder Diagram
Komponen-komponen dasar ladder diagram adalah sebagai berikut :
1. Input/Contact
2. Output/Coil
3. Timer
4. Counter
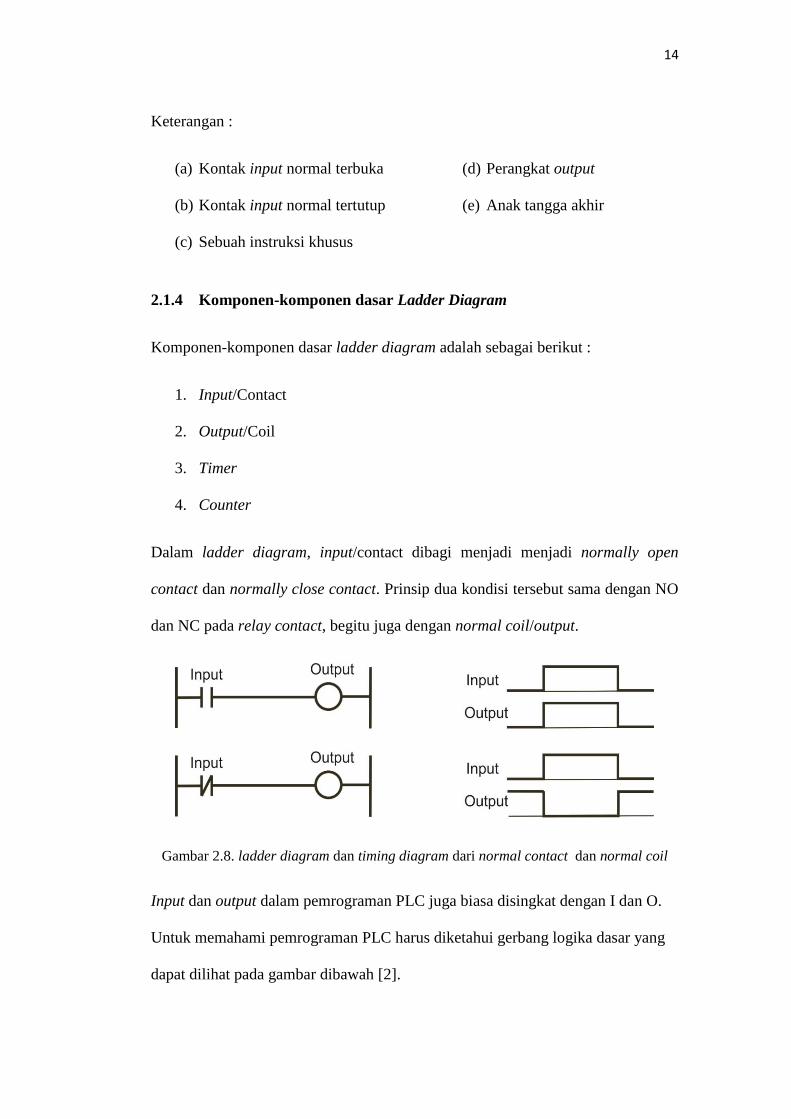
Dalam ladder diagram, input/contact dibagi menjadi menjadi normally open
contact dan normally close contact. Prinsip dua kondisi tersebut sama dengan NO
dan NC pada relay contact, begitu juga dengan normal coil/output.
Gambar 2.8. ladder diagram dan timing diagram dari normal contact dan normal coil
Input dan output dalam pemrograman PLC juga biasa disingkat dengan I dan O.
Untuk memahami pemrograman PLC harus diketahui gerbang logika dasar yang
dapat dilihat pada gambar dibawah [2].
15
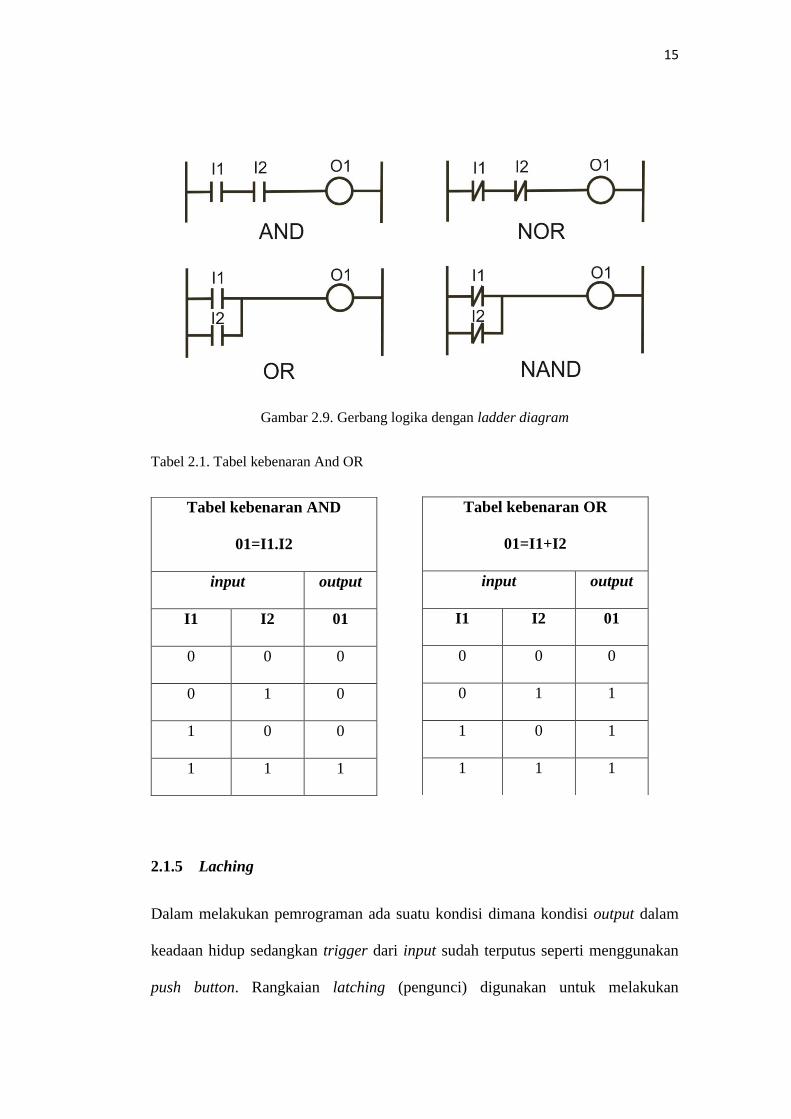
Gambar 2.9. Gerbang logika dengan ladder diagram
Tabel 2.1. Tabel kebenaran And OR
2.1.5 Laching
Dalam melakukan pemrograman ada suatu kondisi dimana kondisi output dalam
keadaan hidup sedangkan trigger dari input sudah terputus seperti menggunakan
push button. Rangkaian latching (pengunci) digunakan untuk melakukan
Tabel kebenaran AND
01=I1.I2
input output
I1 I2 01
0 0 0
0 1 0
1 0 0
1 1 1
Tabel kebenaran OR
01=I1+I2
input output
I1 I2 01
0 0 0
0 1 1
1 0 1
1 1 1
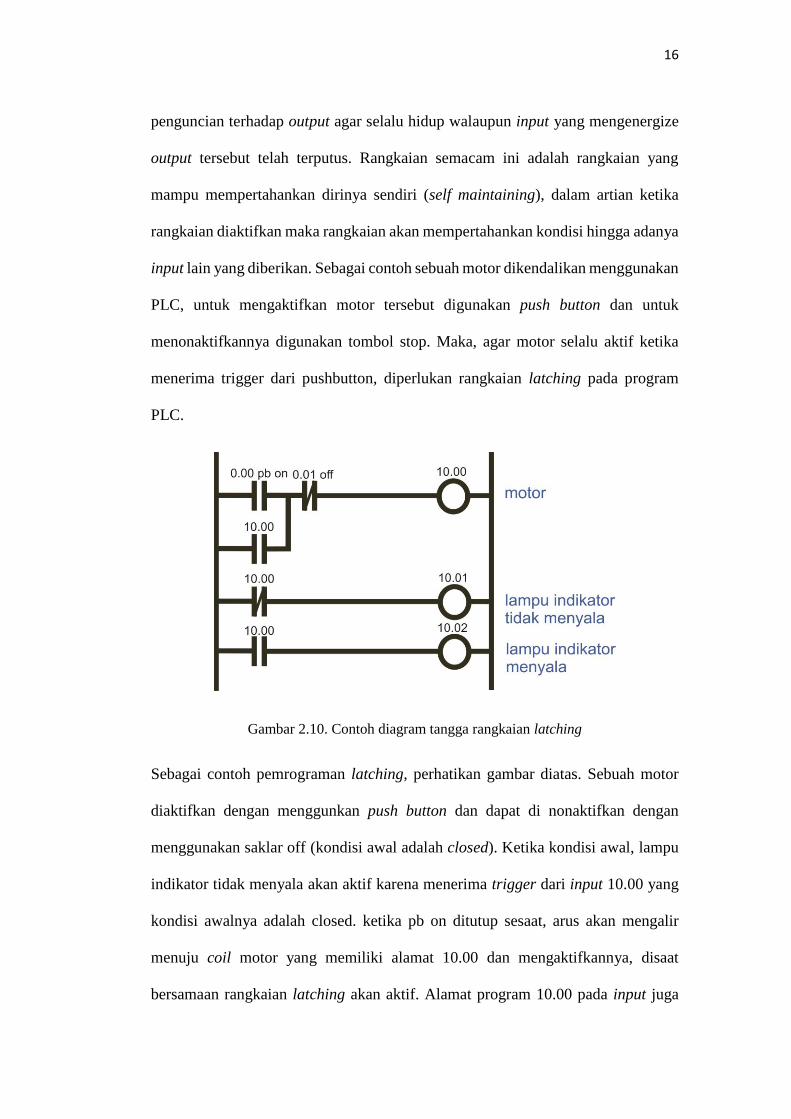
16
penguncian terhadap output agar selalu hidup walaupun input yang mengenergize
output tersebut telah terputus. Rangkaian semacam ini adalah rangkaian yang
mampu mempertahankan dirinya sendiri (self maintaining), dalam artian ketika
rangkaian diaktifkan maka rangkaian akan mempertahankan kondisi hingga adanya
input lain yang diberikan. Sebagai contoh sebuah motor dikendalikan menggunakan
PLC, untuk mengaktifkan motor tersebut digunakan push button dan untuk
menonaktifkannya digunakan tombol stop. Maka, agar motor selalu aktif ketika
menerima trigger dari pushbutton, diperlukan rangkaian latching pada program
PLC.
Gambar 2.10. Contoh diagram tangga rangkaian latching
Sebagai contoh pemrograman latching, perhatikan gambar diatas. Sebuah motor
diaktifkan dengan menggunkan push button dan dapat di nonaktifkan dengan
menggunakan saklar off (kondisi awal adalah closed). Ketika kondisi awal, lampu
indikator tidak menyala akan aktif karena menerima trigger dari input 10.00 yang
kondisi awalnya adalah closed. ketika pb on ditutup sesaat, arus akan mengalir
menuju coil motor yang memiliki alamat 10.00 dan mengaktifkannya, disaat
bersamaan rangkaian latching akan aktif. Alamat program 10.00 pada input juga

17
akan aktif. Arus pada pb on hanya akan aktif sesaat untuk mengenergize motor dan
selanjutnya arus akan terputus. Motor akan tetap aktif karena mendapat aliran arus
dari input 10.00. sedangkan lampu indikator menyala akan aktif dan lampu
indikator tidak menyala akan mati [3].
2.1.6 Timer
Dalam sebuah sistem kontrol berbasis relay, pemberian penundaan waktu diberikan
oleh sebuah relay khusus yang disebut time delay relay. Sedangkan pada sistem
kontrol berbasis PLC instruksi tersebut disebut dengan timer. Timer inilah yang
dalam pemrograman PLC berfungsi untuk menunda terjadinya suatu aksi.
Secara umum kinerja timer adalah:
• Timer bekerja jika timer coil mendapat trigger dari inputnya.
• Timer akan menghitung hingga preset value dan timer contact akan aktif.
• Timer akan non aktif jika inputnya dimatikan.
Adapun jenis timer bermacam-macam tergantung merk PLC yang digunakan.
Secara umum jenis timer yaitu:
1. On delay timer
2. Off delay timer
3. Pulse timer
4. Repeating/cycle timer
5. Dan lainnya.
Berikut merupakan salah satu contoh timer yang sering digunakan dalam
pemrograman PLC. Timer on delay bekerja dengan menunda pengaktifan output
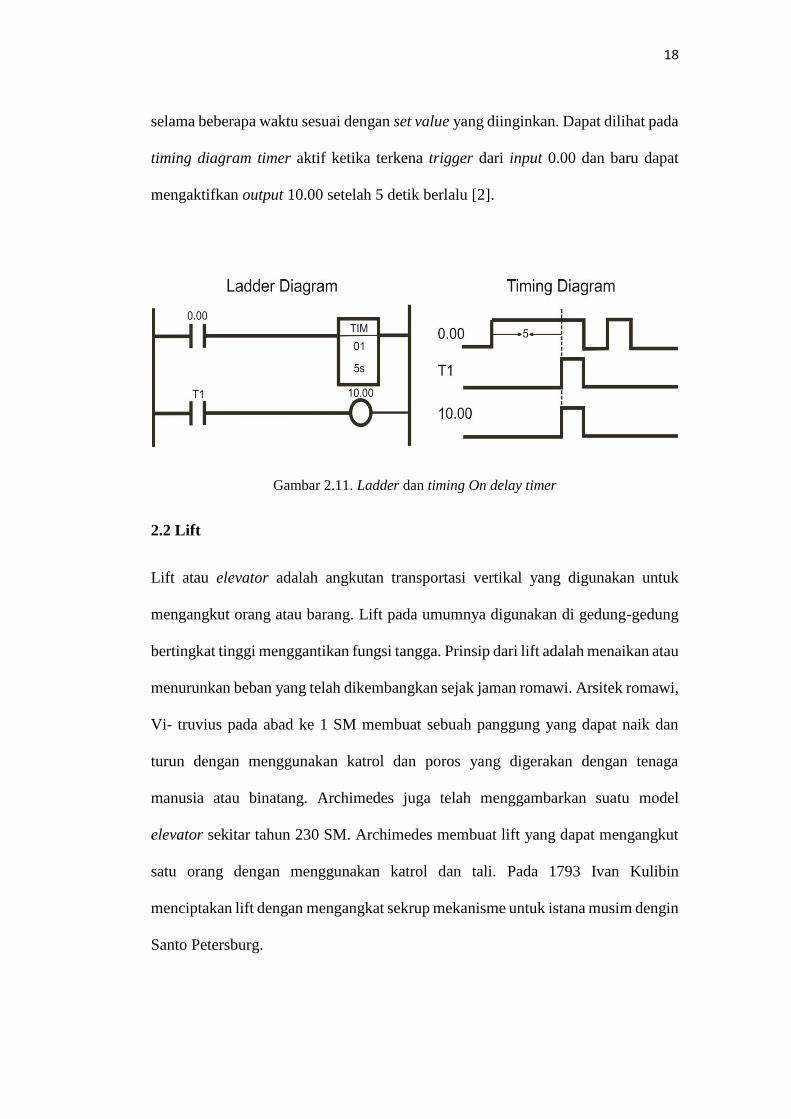
18
selama beberapa waktu sesuai dengan set value yang diinginkan. Dapat dilihat pada
timing diagram timer aktif ketika terkena trigger dari input 0.00 dan baru dapat
mengaktifkan output 10.00 setelah 5 detik berlalu [2].
Gambar 2.11. Ladder dan timing On delay timer
2.2 Lift
Lift atau elevator adalah angkutan transportasi vertikal yang digunakan untuk
mengangkut orang atau barang. Lift pada umumnya digunakan di gedung-gedung
bertingkat tinggi menggantikan fungsi tangga. Prinsip dari lift adalah menaikan atau
menurunkan beban yang telah dikembangkan sejak jaman romawi. Arsitek romawi,
Vi- truvius pada abad ke 1 SM membuat sebuah panggung yang dapat naik dan
turun dengan menggunakan katrol dan poros yang digerakan dengan tenaga
manusia atau binatang. Archimedes juga telah menggambarkan suatu model
elevator sekitar tahun 230 SM. Archimedes membuat lift yang dapat mengangkut
satu orang dengan menggunakan katrol dan tali. Pada 1793 Ivan Kulibin
menciptakan lift dengan mengangkat sekrup mekanisme untuk istana musim dengin
Santo Petersburg.

19
Pada tahun 1853, Elisha Otis memperkenalkan sistem keselamatan lift yang
berfungsi untuk mencegah jatuhnya sangkar jika kabel putus. Beberapa dari inovasi
yang diciptakan oleh otis dalam bidang pengendalian otomatis adalah sistem
pengendalian sinyal, peak periode control, sistem autotronik otis dan multiple
zoning, desain keselamatan lift Otis agak mirip dengan salah satu jenis lift yang
masih digunakan sampai sekarang. Pada 23 Maret 1857, lift otis dipasang pertama
kali di 488 Broadway di New York City. Pada tahun 1867 Charles dan Norton
mengembangkan warisan ayahnya, otis, dengan membentuk Otis Brothers Co. Pada
tahun 1889 Otis mengeluarkan mesin elevator listrik direct-connected geared
pertama yang sangat sukses. Dan pada tahun 1903, Otis memperkenalkan desain
yang nantinya akan menjadi tulang punggung industri lift yaitu elevator listrik
gearless traction yang dan bahkan terbukti umurnya mengalahkan usia bangunan
itu sendiri.
Gambar 2.12. Konstruksi Lift

20
Dengan adanya penemuan ini tentu sangat mempengaruhi perkembangan
pembangunan gedung-gedung tinggi pencakar langit. Para insinyur dapat dengan
bebas mendesain gedung-gedung tinggi tanpa harus khawatir dengan akses untuk
mencapai puncak gedung. Hal ini pula membawa pada perkembangan struktur
gedung-gedung tinggi yang dibuktikan dengan hadirnya Empire State Building dan
World Trade Center di New York, John Hancock Center di Chicago dan CN tower
di Toronto. Lift listrik pertama dibuat oleh Werner von Siemens pada tahun 1880.
Keamanan dan kecepatan lift listrik mengalami peningkatan drastis yang di inisiasi
oleh Frank Sprague.
2.2.1 Cara kerja lift
Berdasarkan cara kerjanya lift dibagi menjadi dua jenis yaitu jenis hidrolik dan jenis
traksi. Pada lift hidrolik terdapat sebuah pompa listrik yang menekan minyak yang
terdapat didalam tabung silinder. Didalam tabung sebuah piston bergerak naik dan
turun mendorong sebuah batang baja yang menjadi tumpuan kotak lift. Kotak lift
bergerak turun perlahan ketika katup minyak terbuka. Tabung silinder lift hidrolik
ini diletakan dibawah tanah dengan kedalaman sama dengan tinggi maksimal
naiknya lift. Karena itu pada umumnya lift jenis ini hanya dipasang pada gedung
bertingkat enam atau lebih rendah, dengan kecepatan lift sekitar 15 sampai 50 meter
per menit.
Lift traksi adalah lift yang digerakan dengan menggunakan motor listrik melalui
kabel baja. Motor listrik untuk lift berkecepatan rendah umumnya menggunakan
sumber arus bolak balik, sedangkan lift berkecepatan tinggi menggunakan arus

21
searah. Ada dua macam lift jenis ini yaitu dengan menggunakan roda gigi dan tanpa
roda gigi.
Lift traksi tanpa menggunakan roda gigi paling sedikit menggunakan tiga kabel baja
untuk menaikan ataupun menurunkan kotak lift. Kabel-kabel baja tersebut
digerakan oleh sebuah motor listrik pada bagian atas lift melalui sebuah roda seperti
katrol. Kabel baja tersebut selain terhubung pada kotak lift juga ujung lainnya
terkait dengan bandul pengimbang. Bandul pengimbang berbobot sekitar 40 persen
berat maksimum kotak lift berfungsi sebagai pengimbang agar tenaga motor listrik
hanya digunakan untuk menggerakan selisih beban antara keduanya. Untuk
menyesuaikan gerakan antara kotak lift dengan bandul pengimbang ini maka
disepanjang rel yang menempel di dinding lorong dilengkapi dengan roda-roda.
Sebuah kabel untuk keperluan menggerakan kipas, memutar kipas, menyalakan
lampu, dal yang lainnya dihubungkan ke kotak lift secara elastis. Lift jenis ini
umumnya digunakan pada gedung bertingkat 10 lebih dan umumnya memiliki
kecepatan 150 meter per menit [4].
2.3 Kecerdasan Buatan
Seiring dengan perkembangan teknologi, sistem kendali juga mengalami
perkembangan yang cukup pesat karena kecepatan komputasi yang tinggi
memungkinkan algoritma kendali yang rumit dapat diimplementasikan secara real
time. Beberapa metode kendali baru yang awalnya hanya sebatas penelitian karena
terhalang oleh daya dukung teknologi komputasi, kini banyak yang telah
diimplementasikan dengan unjuk kerja yang baik. Salah satunya adalah sistem
kendali cerdas.

22
Sistem kendali cerdas adalah sistem kendali yang menggunakan sistem kecerdasan
buatan dalam perancangan pengendali maupun sebagai pengendali itu sendiri.
Sistem kecerdasan buatan adalah sebuah produk dari bidang teknologi informasi
dengan prinsip meniru cara berpikir manusia, berperan untk menggantikan peran
operator dengan mesin cerdas. Sistem kecerdasan menggabungkan antara sistem
kecerdasan buatan dengan teknologi kendali untuk menghasilkan sistem kendali
yang dapat menangkap sinyal, mengolahnya dan melakukan aksi kendali cerdas.
Sistem kendali cerdas memiliki kemampuan untuk menangani ketidakpastian
sebuah sistem, misalnya:
• Ketidakpastian dari model sistem/plant yang dikendalikan.
• Perubahan kondisi diluar lingkungan plant.
• Nilai input dari sensor yang tidak presisi.
• Perubahan fungsi aktuator.
Gambar 2.13. Struktur sistem kendali cerdas
Struktur sistem kendali cerdas dapat dilihat pada gambar diatas. Bagian persepsi
dapat berupa sensor yang menangkap informasi dari palnt ataupun dari lingkungan
plant. Bagian kognisi merupakan bagian untuk melakukan pengambilan keputusan,
dapat berupa pemikiran, perencanaan ataupun pembelajaran. Pada bagian kognisi

23
inilah sistem kendali cerdas ditanamkan yang dapat berupasistem fuzzy, sistem
pakar, algoritma optimasi dan jaringan saraf tiruan. Bagian aktuasi merupakan
aktuator dari sistem kendali yang mengolah sistem kendali cerdas untuk
menggerakan plant kekondisi yang diinginkan. Jika kondisi aktuator tidak bekerja
dengan baik maka sistem kendali cerdas ditunut untuk dapat mengatasinya.
2.3.1 Fuzzy Logic
Fuzzy Logic (logika samar) adalah bagian atau salah satu metode dalam Artifical
Intelligence (Kecerdasan buatan). Sistem kendali fuzzy berkembang pesat di jepang.
Banyak barang yang diproduksi disana sudah terdapat sistem fuzzy sebagai
pengendalinya, seperti mesin cuci, rice cooker, vacuum cleaner, camcoder, televisi
dan sebagainya. Sistem fuzzy logic bahkan telah diterapkan di elevator, kereta api,
crane, mesin, transmisi otomatis, sistem pengeraman dan sistem kendali lalu lintas
bahkan dapat diaplikasikan dalam bentuk perangkat lunak ataupun program
komputer seperti keamanan, diagnosis medis dan kompresi data.
Pengaplikasian fuzzy logic diatas dimungkinkan setelah adanya hasil penelitian oleh
Lotfi Zadeh pada tahun 1965 yang memperkenalkan teori himpunan fuzzy. Teori ini
merupakan perluasan teori himpunan tegas, didasarkan pada persepsi manusia
dalam menentukan suatu nilai yang tidak pasti seperti mempersepsikan suhu
dengan istilah panas atau dingin bukan dengan nilai derajatnya. Teori fuzzy pada
bidang kendali pertama kali diperkenalkan oleh Ebrahim Mamdani pada tahun 1974
yang melakukan perancangan sistem kontrol pada mesin uap.
Sistem fuzzy bekerja bekerja berdasarkan himpunan fuzzy dan operasi himpunan
fuzzy. Himpunan fuzzy merepresentasikan nilai linguistik suatu variabel, sebagai

24
contoh variabel suhu dinyatakan dengan nilai linguistik panas, sejuk, dan dingin,
variabel jarak dinyatakan dengan jauh, sedang, dan dekat. Sistem fuzzy akan
melakukan inferensi atau penarikan kesimpulan berdasarkan nilai linguistik
variabel input dan akan menghasilkan keputusan yang berupa nilai linguistik
variabel output. Dalam proses inferensi inilah terjadi operasi himpunan fuzzy seperti
operasi AND, OR dan implikasi. Keputusan dari sistem fuzzy ditentukan
berdasarkan aturan-aturan yang disebut basis aturan fuzzy yang didalamnya berisi
pernyataan-pernyataan relasi variabel-variabel input ke variabel output.
Gambar 2.14. Bagian-bagian sistem fuzzy tipe Mamdani
Pada gambar diatas merupakan bagian-bagian dari sistem fuzzy tipe Mamdani.
Bagian fuzzifier berfungsi untuk melakukan fuzzifikasi yaitu mengubah nilai
numerik variabel input yang umumnya berupa nilai hasil pembacaan sensor
menjadi nilai linguistik yang berupa derajat keanggotaan pada suatu himpunan
fuzzy variabel input. Pada bagian defuzzifier akan melakukan proses sebaliknya
dengan mengubah nilai linguistik hasil inferensi fuzzy ke nilai numerik yang akan
dikirimkan ke output. Bagian basis aturan fuzzy berisi aturan If-Then yang
menggambarkan pemetaan anggota-anggota atau nilai-nilai variabel input dan
variabel output.

25
Sistem kendali fuzzy banyak digunakan dalam berbagai aplikasi karena memiliki
beberapa kelebihan:
• Sistem kendali fuzzy bersifat kokoh dibandingkan sistem kendali PID
dikarenakan sistem fuzzy memiliki daerah kerja yang lebih luas dan lebih
tahan terhadap gangguan.
• Sistem kendali fuzzy mudah dimodifikasi karena lebih mudah dimengerti
aturan-aturannya. Hal ini dikarenakan kendali fuzzy menggunakan strategi
operator yang dinyatakan dengan bahasa yang alamiah.
• Sistem kendali fuzzy cukup mudah untuk dapat dipahami bagaimana cara
kerjanya, merancangnya dan bagaimana cara mengaplikasikannya.
• Membangun kendali fuzzy lebih mudah lebih murah dibandingkan dengan
membangun pengendali berdasarkan model [5].
Pada sistem inferensi fuzzy terdapat beberapa metode untuk menentukannya,
diantaranya adalah metode Tsukamoto, metode Mamdani, metode Sugeno.
Didalam software pemrograman matlab metode yang di gunakan adalah metode
Mamdani dan metode Sugeno.
Metode Mamdani sering dikenal dengan nama Metode Max-Min. Metode ini
diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk mendapatkan
output diperlukan 4 tahap:
1. Pembentukan himpunan fuzzy. Pada metode ini variabel input maupun
variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Aplikasi fungsi implikasi (aturan). Pada metode ini fungsi implikasi yang
digunakan adalah Min.
26
3. Komposisi aturan. Tidak seperti penalaran monoton, apabila sistem terdiri
dari beberapa aturan, maka inferensi diperoleh dari kumpulan dan korelasi
antar aturan. Ada 3 metode yang digunakan dalam melakukan inferensi
sitem fuzzy yaitu : max, additive dan probabilistik OR.
4. Penegasan (defuzzy). Input dari proses defuzzifikasi adalah suatu himpunan
fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy, sedangkan output
yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy
tersebut.
Selain metode Mamdani yang sering digunakan, juga ada metode Sugeno.
Metode ini hampir sama dengan metode Mamdani, hanya saja output sistem
tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan
linear. Metode ini diperkenalkan oleh Takagi-Sugeno pada tahun 1985 [6].
2.3.2 Himpunan Fuzzy
Himpunan Fuzzy merupakan sebuah gagasan untuk memperluas jangkauan fungsi
karakteristik sehingga fungsi tersebut mencakup bilangan real pada interval 0 dan
1. Nilai keanggotaanya menunjukkan bahwa suatu nilai dalam semesta
pembicaraan tidak hanya berada pada 0 atau 1, namun diantara keduanya ada
sebuah nilai. Dengan kata lain terdapat nilai-nilai antara interval 0 dan 1 atau jika
di misalkan 0 adalah salah dan 1 adalah benar, maka pada himpunan fuzzy antara
salah dan benar masih ada nilai-nilai yang terletak diantaranya.
Misalkan diketahui klasifikasi:
Muda Umur < 35Tahun
Setengah Baya 35 ≤ umur ≤ 55 tahun
Tua umur > 55 tahun
27
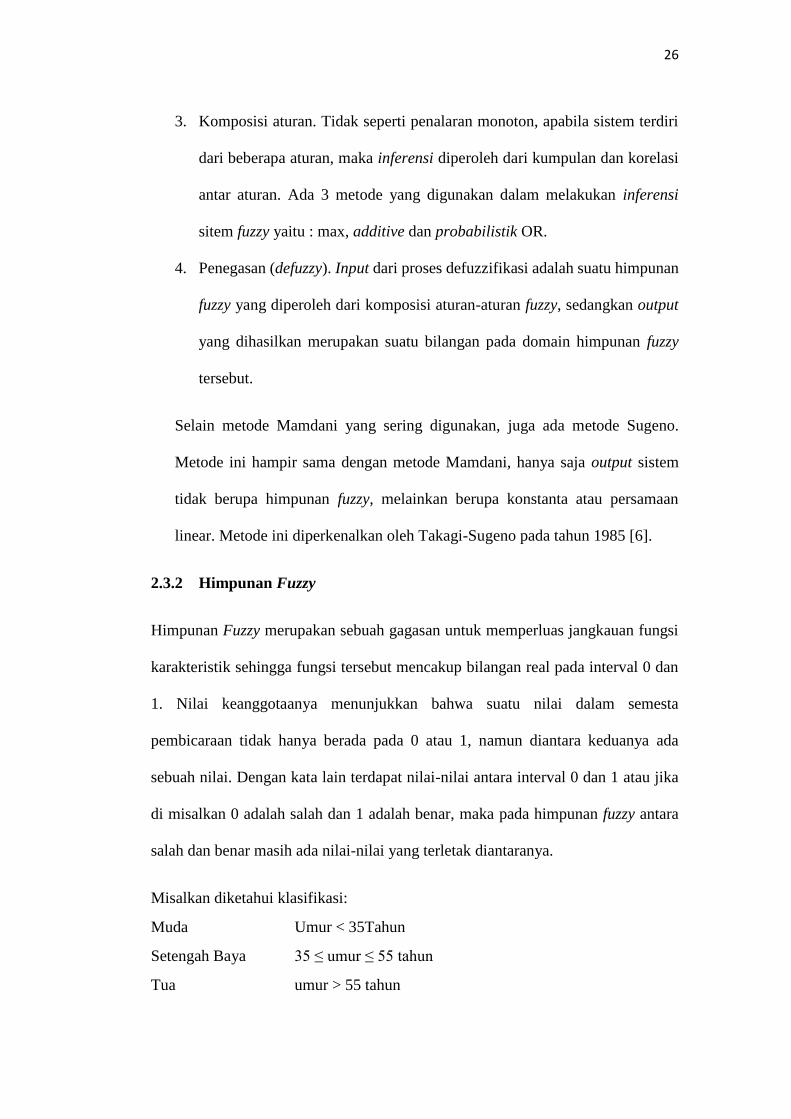
Dengan melihat klasifikasi diatas amatlah tidak adil untuk menetapkan nilai tua.
Misalkan untuk klasifikasi umur 55 dan 56 sangat jauh berbeda, umur 55 masih
termasuk dalam kategori setengah baya sedangkan umur 56 sudah termasuk dalam
kategori tua. Begitu juga untuk kategori muda dan tua. Orang yang berumur 34
tahun dikatakan muda sedangkan unmur 35 dikatakan sudah tidak muda. Orang
yang berumur 55 tahun masih dikatakan setengah baya sedangkan umur 55 tahun
lebih sehari akan dikatakan tua. Dengan demikian pendekantan seperti ini sangat
tidak cocok untuk diterapkan pada hal-hal yang bersifat kontinyu.
Gambar 2.15. Himpunan setengah baya
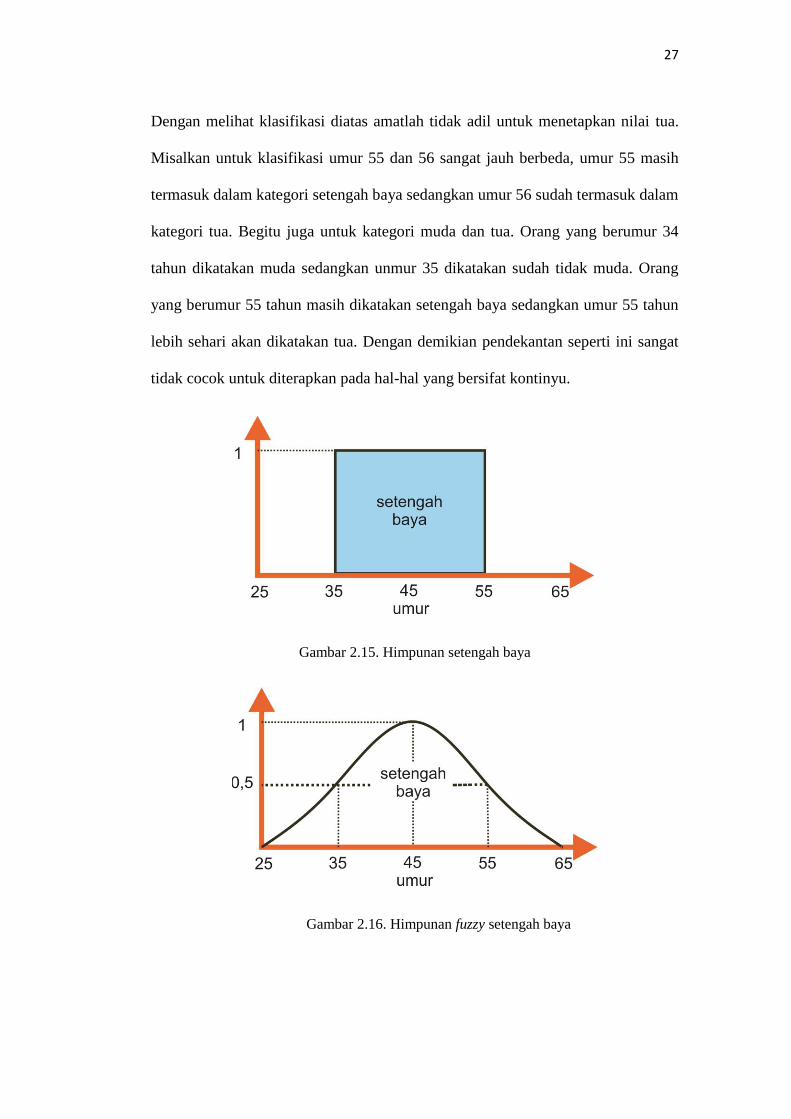
Gambar 2.16. Himpunan fuzzy setengah baya
28
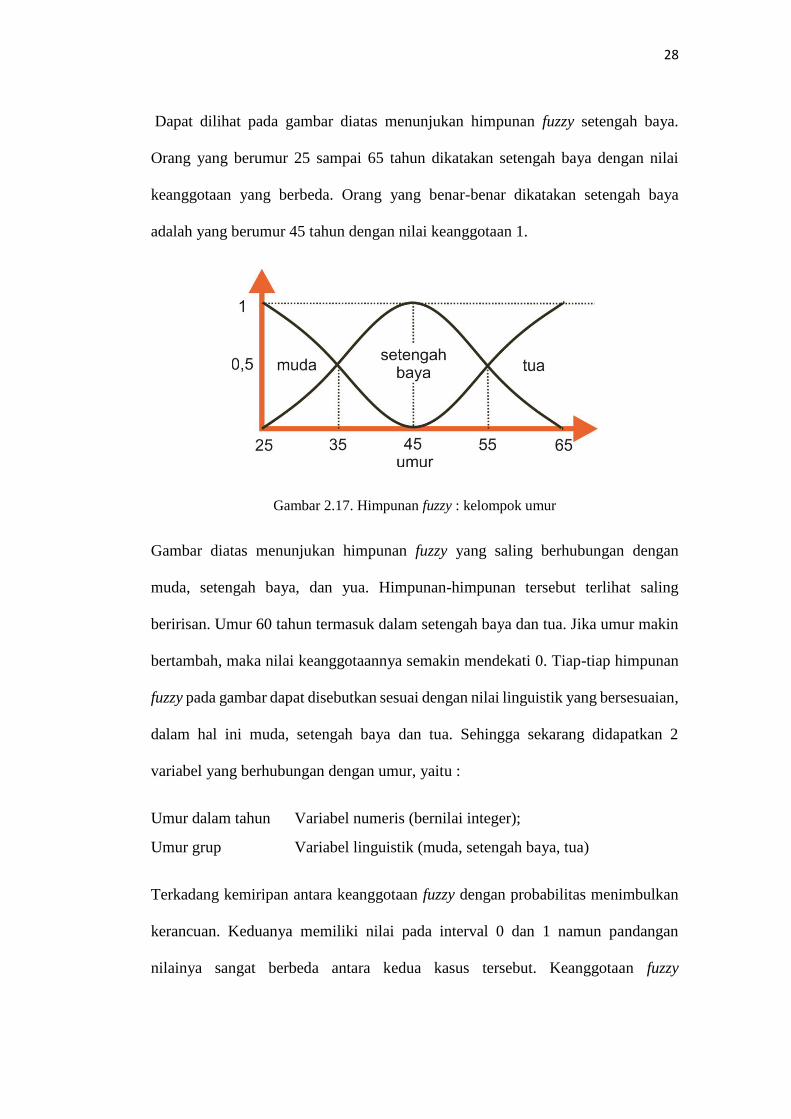
Dapat dilihat pada gambar diatas menunjukan himpunan fuzzy setengah baya.
Orang yang berumur 25 sampai 65 tahun dikatakan setengah baya dengan nilai
keanggotaan yang berbeda. Orang yang benar-benar dikatakan setengah baya
adalah yang berumur 45 tahun dengan nilai keanggotaan 1.
Gambar 2.17. Himpunan fuzzy : kelompok umur
Gambar diatas menunjukan himpunan fuzzy yang saling berhubungan dengan
muda, setengah baya, dan yua. Himpunan-himpunan tersebut terlihat saling
beririsan. Umur 60 tahun termasuk dalam setengah baya dan tua. Jika umur makin
bertambah, maka nilai keanggotaannya semakin mendekati 0. Tiap-tiap himpunan
fuzzy pada gambar dapat disebutkan sesuai dengan nilai linguistik yang bersesuaian,
dalam hal ini muda, setengah baya dan tua. Sehingga sekarang didapatkan 2
variabel yang berhubungan dengan umur, yaitu :
Umur dalam tahun Variabel numeris (bernilai integer);
Umur grup Variabel linguistik (muda, setengah baya, tua)
Terkadang kemiripan antara keanggotaan fuzzy dengan probabilitas menimbulkan
kerancuan. Keduanya memiliki nilai pada interval 0 dan 1 namun pandangan
nilainya sangat berbeda antara kedua kasus tersebut. Keanggotaan fuzzy

29
memberikanukuran terhadap pendapat ataupun keputusan, sedangkan probabilitas
mengindikasikan proporsi terhadap keseringan suatu hasil bernilai benar. Sebagai
contoh, jika nilai keanggotaan suatu himpunan fuzzy muda adalah 0,9; maka tidak
dipermasalahkan berapa seringnya nila tersebut diulang secara individual untuk
mengharapkan suatu hasil yang hampir pasti muda. Pada penilaian probabilitas 0,9
muda menunjukan bahwa ada kemungkinan 10% dari himpunan tersebut
diharapkan tidak muda [7].
2.3.3 Langkah-langkah perancangan fuzzy logic
Dasar dari perancangan kendali fuzzy adalah dengan menyertakan pengalaman
pakar dari operator manusia pada perancangannya untuk mengendalikan proses
dengan relasi masukan keluaran yang dinyatakan dengan kumpulan aturan fuzzy
seperti aturan if – then dengan menggunakan variabel linguistik, aturan kendali
fuzzy, dan menyertakan pengalaman seorang pakar operator pada perancangan
pengendalinya. Ada lima prinsip dasar dalam perancangan kendali fuzzy :
1. Mendefisikan variabel input dan output kendali fuzzy. Variabel input dapat
berupa nilai error, nilai referensi output, nilai variabel keadaan. Output
kendali fuzzy merupakan variabel input pada sistem yang dikendalikan dan
dilakukan manipulasi untuk menghasilkan output sistem yang diinginkan.
2. Membuat partisi fuzzy pada ruang input dan output serta membuat fungsi
keanggotaan yang sesuai dengan variabel linguistik inpur dan output
tersebut.
3. Menentukan aturan-aturan kendali fuzzy. Aturan kendali fuzzy ditentukan
berdasarkan pengetahuan perilaku sistem yang dikendalikan. Pengetahuan
30
ini diperoleh dari pakar yang telah melakukan observasi terhadap sistem
tersebut.
4. Menentukan mekanisme inferensi fuzzy , meliputi pemilihan implikasi fuzzy
dan operator komposisi (min-max) serta interpretasi kalimat penghubung
syarat (and-or).
5. Pemilihan operator defuzzifikasi, misalnya center of area, mean of maximum
dan sebagainya [5].
2.4 Motor Arus Searah (DC)
Motor DC adalah suatu mesin yang berfungsi mengubah gaya listrik arus searah
menjadi gaya gerak berupa putaran rotor. Keunggulan utama dari motor DC adalah
kecepatannya mudah dikendalikan dan tidak mempengaruhi kualitas pasokan daya.
Kerja motor DC terjadi jika suatu lilitan jangkar dialiri arus listrik searah dengan
arah i didalam medan magnet B, maka akan terbangkit gaya F
F = B.i.l
Ket:
F = gaya yang dihasilkan motor (N)
B = kuat medan magnet sekitar (T)
i = arus yang mengalir pada kumparan jangkar (A)
l = panjang kumparan (m)
Karakteristik motor DC:
1. Pemeliharaan dan perbaikan yang diperlukan lebih rutin.

31
2. Lebih mahal dibandingkan motor AC.
3. Torsi tinggi pada kecepatan rendah.
4. Kemampuan mengatasi beban lebih baik.
Gambar 2.18. Motor DC
Motor DC memiliki 3 komponen utama :
1. Kutub medan.
Secara sederhana digambarkan bahwa interaksi antara dua kutub magnet
akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub
medan yang stasioner dan dinamo yang menggerakan bearing pada ruang
diantara kutub medan. Motor DC sederhana memiliki dua kutub sederhana
yaitu kutub utara dan kutub selatan. Garis magnetik energi membesar
melintasi bukaan diantara kutub-kutub dari utara ke selatan.
2. Dinamo
Jika arus masuk menuju dinamo, maka arus akan menjadi elektromagnet.
Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk
menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar
dalam medan magnet yang dibentuk oleh kutub-kutub, hinggga kutub utara

32
dan kutub selatan magnet saling berganti lokasi. Jika hal ini terjadi, arusnya
berbalik untuk merubah kutub-kutub utara dan selatan dinamo.
3. Komutator
Komponen ini umumnya ditemukan dalam motor DC. Kegunaanya adalah
untuk membalikan arah arus listrik dalam dinamo. Komutator juga
membantu dalam transmisi arus antara dinamo dan sumber daya.
2.5 Relay Elektromagnetis
Relay atau biasa disebut sebagai EMR (electromechanical relay) merupakan saklar
magnetis. Relay merupakan alat yang dioperasikan dengan listrik dan secara
mekanis mengontrol penghubungan rangkaian listrik. Relay bekerja berdasarkan
pembentukan elektromagnet yang menggerakan elektromekanis penghubung dari
dua atau lebih titik penghubung (konektor) rangkaian sehingga dapat menghasilkan
kondisi kontak on atau kontak off ataupun kombinasi dari keduanya.
Sebuah relay tersusun tersusun atas kumparan, pegas, saklar dan 2 kontak
elektronik yaitu kontak normally open dan kontak normally close. Kontak normally
open akan terbuka ketika ada arus mengalir pada kumparan, dan akan tertutup
seketika kumparan dialiri arus listrik. Begitu juga sebaliknya kontak normally close
akan tertutup apabila kumparan tidak dialiri arus listrik dan akan membuka ketika
kumparan mendapat aliran listrik.
Umumnya relay kontrol digunakan sebagai alat pembantu untuk kontrol
penghubung rangkaian dan beban., misalnya digunakan pada motor kecil DC,
selenoid, lampu dan lain-lain. Relay dapat digunakan untuk mengontrol rangkaian
beban tegangan tinggi dengan rangkaian kontrol tegangan rendah, hal indi dapat

33
dilakukan karena kumparan dan kontak dari relay secara listrik terisolasi satu sama
lain [8].
Gambar 2.19. Relay

III. METODE
3.1 Waktu dan Tempat Penelitian
Waktu : September 2017 – November 2018
Tempat : Laboratorium Teknik Kendali Jurusan Teknik Elektro Universitas
Lampung.
Tabel 3.1. Jadwal dan aktivitas penelitian
No Aktivitas September Oktober November
1 2 3 4 1 2 3 4 1 2 3 4
1 Studi literatur
2 Pembuatan proposal
3 Perancangan lift
4 Seminar I
5 Pembuatan prototipe lift
6 Pembuatan rangkaian
7 Pembuatan program
8 Uji coba alat
9 Analisis dan kesimpulan
10 Pembuatan Laporan
11 Seminar II

35
3.2 Alat dan Bahan
Alat dan bahan yang digunakan pada penelitian ini antara lain adalah sebagai
berikut :
a. Instrumen dan komponen terdiri dari :
1. PLC Omron CPM2A
2. Motor DC 12 V
3. Relay
4. Transformator
5. Kapasitor
6. Dioda
7. Resistor
8. Gear dan belt
9. Multimeter digital
b. Perangkat kerja terdiri dari :
1. Personal Komputer
2. PCB
3. Bor PCB
4. Kabel Penghubung
5. Peralatan Solder
c. Bahan-bahan kerja terdiri dari :
1. Acrilyc
2. Lem Acrilyc
3. Kotak rangkaian
4. Soket banana
3.3 Prosedur Kerja
Dalam melaksanakan penelitian ini ada beberapa langkah kerja yang akan
dilakukan, diantaranya :
1. Studi literatur
2. Penentuan spesifikasi rancangan
3. Perancangan perangkat keras

36
4. Perancangan perangkat lunak
5. Pembuatan alat
6. Pengujian alat
Tidak
Ya
Gambar 3.1. Diagram alir penelitian
Start
Studi literatur
Penentuan spesifikasi
rancangan
Perancangan
Perangkat keras
Perancangan
Perangkat lunak
Pembuatan alat
Pengujian alat
Berhasil
/ tidak
Selesai

37
3.3.1 Studi Literatur
Studi literatur dilakukan untuk melakukan pencarian informasi yang berkaitan
dengan tugas akhir, diantaranya adalah:
a. Karakteristik PLC, cara kerja serta perancangan wiring dan
pemrogramannya.
b. System kerja dan komponen yang diperlukan dalam pembuatan prototipe
lift.
c. Pembuatan kecerdasan buatan menggunakan matlab.
3.3.2 Penentuan Spesifikasi Rancangan
Rancangan lift yang akan dibuat sebagai prototipe dalam penelitian ini dibagi
menjadi 2 bagian, yaitu bagian kotak lift dan keseluruhan lift.
Rancangan kotak lift sebagai pengangkut penumpang :
Gambar 3.2 Rancangan kotak lift, tampak depan dan samping

38
Rancangan keseluruhan lift :
Gambar 3.3. Rancangan keseluruhan lift, tampak samping dan depan

39
Secara keseluruhan rancangan lift yang akan digunakan pada penelitian ini adalah
lift dengan 5 lantai dengan sistem kendali utamanya adalah PLC omron tipe
CPM2A. Kendali utama inilah yang nantinya akan mengatur kinerja dua motor
utama yang berfungsi untuk membuka menutup pintu dan menaikan dan
menurunkan kotak lift.
Didalam kotak lift terdapat 7 tombol yang berfungsi sebagai penentu lantai mana
yang akan dituju berupa Push button lantai 1 hingga lantai 5. Dua tombol lainnya
berfungsi untuk membuka dan menutup pintu lift secara manual. Pada setiap lantai
dilengkapi dengan satu tombol yang berfungsi untuk memanggil kotak lift.
3.3.3 Perancangan Perangkat Keras
Berikut ini adalah perancangan perangkat keras yang digunakan pada penelitian ini:
a. Power supply
Power supply pada penelitian ini adalah untuk memberikan catu daya
tegangan DC kepada perangkat yang memerlukan sebesar 24 volt dan 12
volt DC.
Gambar 3.4. Power supply

40
b. Rangkaian Driver Motor
Rangkaian ini merupakan rangkaian yang digunakan untuk mengendalikan
motor DC sehingga dapat digunakan searah dengan jarum jam dan juga
kebalikan arah jarum jam. Rangkaian ini terdiri dari 4 relay Single Pole
Double Throw (SPDT), 2 relay digunakan untuk mengatur motor pembuka
pintu dan 2 relay lagi digunakan untuk mengatur motor transport kotak lift.
Gambar 3.5. Driver Motor
c. Sistem pengendali utama
Pada penelitian ini digunakan PLC Omron CPM2A sebagai pengendali
utama. PLC ini yang akan melakukan kontrol terhadap input dan output
yang terhubung padanya. Sebelum melakukan pemrograman PLC biasanya
dilakukan pengalamatan terhadap input atau output yang akan digunakan.
Hal ini dilakukan untuk mempermudah pengerjaan program PLC.
41
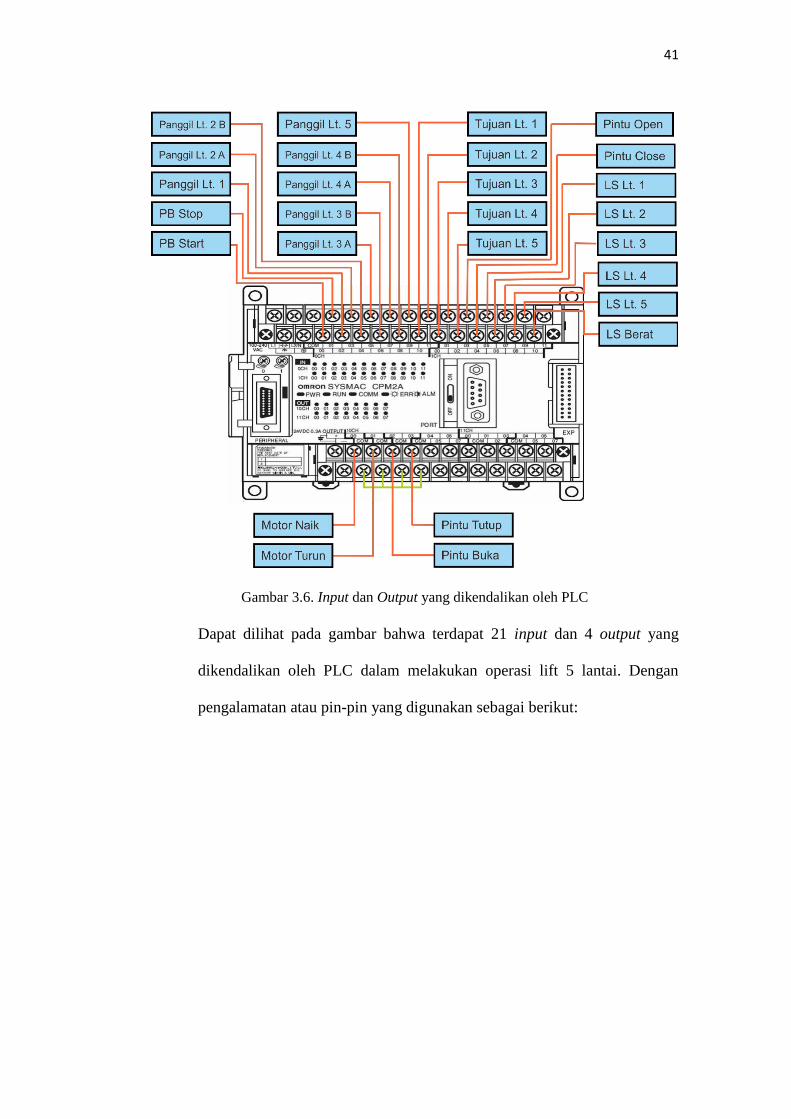
Gambar 3.6. Input dan Output yang dikendalikan oleh PLC
Dapat dilihat pada gambar bahwa terdapat 21 input dan 4 output yang
dikendalikan oleh PLC dalam melakukan operasi lift 5 lantai. Dengan
pengalamatan atau pin-pin yang digunakan sebagai berikut:
42
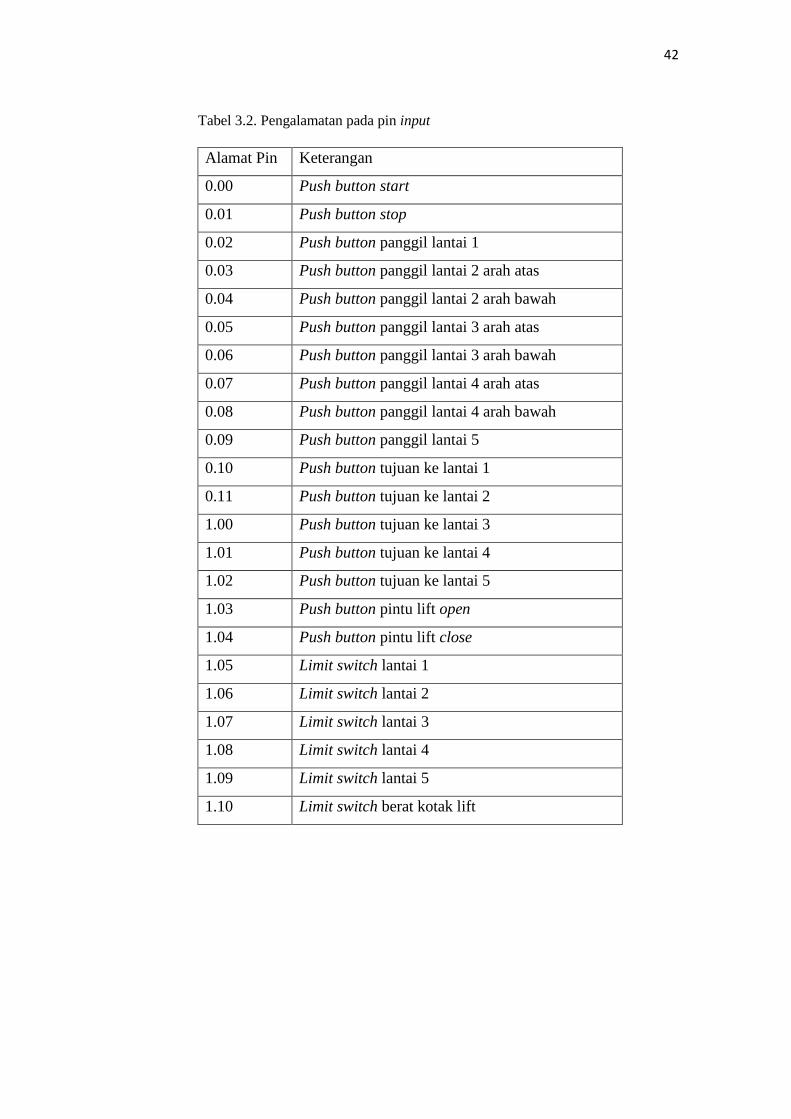
Tabel 3.2. Pengalamatan pada pin input
Alamat Pin Keterangan
0.00 Push button start
0.01 Push button stop
0.02 Push button panggil lantai 1
0.03 Push button panggil lantai 2 arah atas
0.04 Push button panggil lantai 2 arah bawah
0.05 Push button panggil lantai 3 arah atas
0.06 Push button panggil lantai 3 arah bawah
0.07 Push button panggil lantai 4 arah atas
0.08 Push button panggil lantai 4 arah bawah
0.09 Push button panggil lantai 5
0.10 Push button tujuan ke lantai 1
0.11 Push button tujuan ke lantai 2
1.00 Push button tujuan ke lantai 3
1.01 Push button tujuan ke lantai 4
1.02 Push button tujuan ke lantai 5
1.03 Push button pintu lift open
1.04 Push button pintu lift close
1.05 Limit switch lantai 1
1.06 Limit switch lantai 2
1.07 Limit switch lantai 3
1.08 Limit switch lantai 4
1.09 Limit switch lantai 5
1.10 Limit switch berat kotak lift

43
Tabel 3.3. Pengalamatan pada pin output
Alamat Pin Keterangan
10.00 Motor Naik
10.01 Motor Turun
10.02 Pintu lift Open
10.03 Pintu lift Close
Tabel 3.4. Pengalamatan internal memmory
Alamat Keterangan
20.00 Memmory system
20.01 Memmory motor naik
20.02 Memmory motor turun
20.03 Memmory pintu open
20.04 Memmory pintu close
20.05 Memmory push button panggil lantai 1 hold motor
20.06 Memmory push button panggil lantai 2 atas hold motor
20.07 Memmory push button panggil lantai 2 bawah hold motor
20.08 Memmory push button panggil lantai 3 atas hold motor
20.09 Memmory push button panggil lantai 3 bawah hold motor
20.10 Memmory push button panggil lantai 4 atas hold motor
20.11 Memmory push button panggil lantai 4 bawah hold motor
20.12 Memmory push button panggil lantai 5 atas hold motor
20.13 Memmory hold pintu
20.14 Memmory pintu close 10s
20.15 Memmory pintu open manual
21.00 Memmory pintu close manual
21.01 Memmory Holding motor
21.02 Memmory push button tujuan lantai 1
21.03 Memmory push button tujuan lantai 2
21.04 Memmory push button tujuan lantai 3
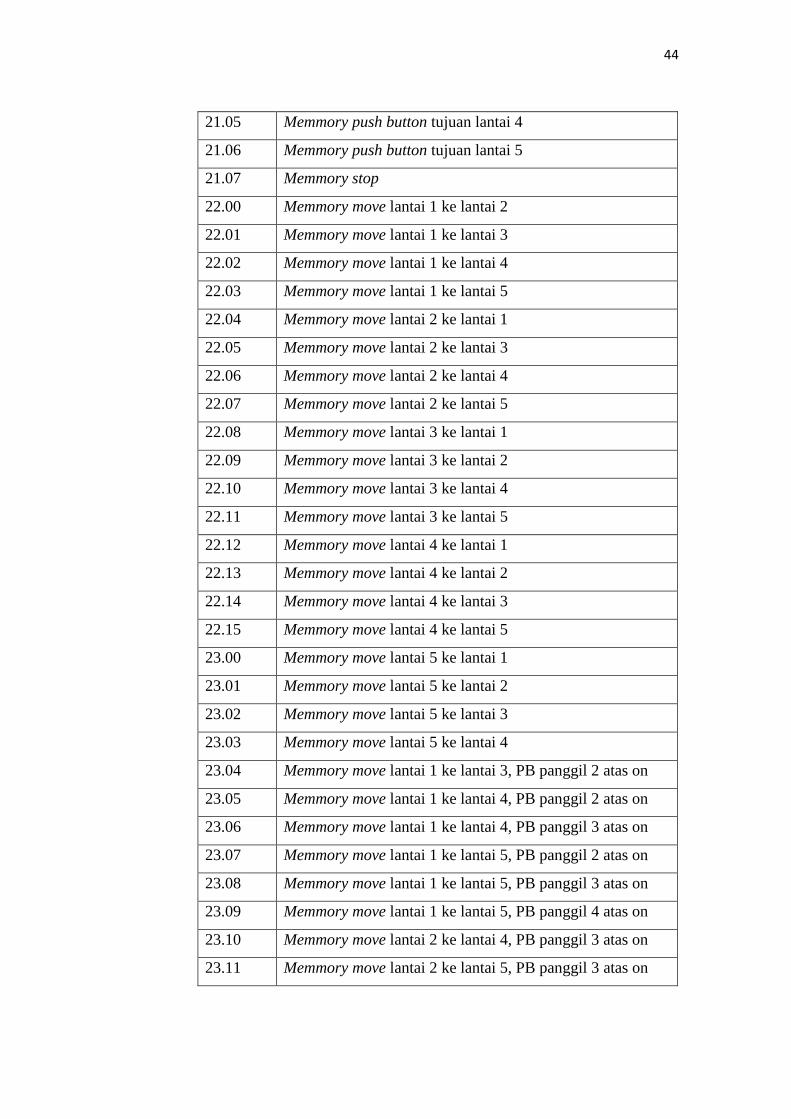
44
21.05 Memmory push button tujuan lantai 4
21.06 Memmory push button tujuan lantai 5
21.07 Memmory stop
22.00 Memmory move lantai 1 ke lantai 2
22.01 Memmory move lantai 1 ke lantai 3
22.02 Memmory move lantai 1 ke lantai 4
22.03 Memmory move lantai 1 ke lantai 5
22.04 Memmory move lantai 2 ke lantai 1
22.05 Memmory move lantai 2 ke lantai 3
22.06 Memmory move lantai 2 ke lantai 4
22.07 Memmory move lantai 2 ke lantai 5
22.08 Memmory move lantai 3 ke lantai 1
22.09 Memmory move lantai 3 ke lantai 2
22.10 Memmory move lantai 3 ke lantai 4
22.11 Memmory move lantai 3 ke lantai 5
22.12 Memmory move lantai 4 ke lantai 1
22.13 Memmory move lantai 4 ke lantai 2
22.14 Memmory move lantai 4 ke lantai 3
22.15 Memmory move lantai 4 ke lantai 5
23.00 Memmory move lantai 5 ke lantai 1
23.01 Memmory move lantai 5 ke lantai 2
23.02 Memmory move lantai 5 ke lantai 3
23.03 Memmory move lantai 5 ke lantai 4
23.04 Memmory move lantai 1 ke lantai 3, PB panggil 2 atas on
23.05 Memmory move lantai 1 ke lantai 4, PB panggil 2 atas on
23.06 Memmory move lantai 1 ke lantai 4, PB panggil 3 atas on
23.07 Memmory move lantai 1 ke lantai 5, PB panggil 2 atas on
23.08 Memmory move lantai 1 ke lantai 5, PB panggil 3 atas on
23.09 Memmory move lantai 1 ke lantai 5, PB panggil 4 atas on
23.10 Memmory move lantai 2 ke lantai 4, PB panggil 3 atas on
23.11 Memmory move lantai 2 ke lantai 5, PB panggil 3 atas on

45
23.12 Memmory move lantai 2 ke lantai 5, PB panggil 4 atas on
23.13 Memmory move lantai 3 ke lantai 1, PB panggil 2 bawah on
23.14 Memmory move lantai 3 ke lantai 5, PB panggil 4 atas on
23.15 Memmory move lantai 4 ke lantai 1, PB panggil 2 bawah on
24.00 Memmory move lantai 4 ke lantai 1, PB panggil 3 bawah on
24.01 Memmory move lantai 4 ke lantai 2, PB panggil 3 bawah on
24.02 Memmory move lantai 5 ke lantai 1, PB panggil 2 bawah on
24.03 Memmory move lantai 5 ke lantai 1, PB panggil 3 bawah on
24.04 Memmory move lantai 5 ke lantai 1, PB panggil 4 bawah on
24.05 Memmory move lantai 5 ke lantai 2, PB panggil 3 bawah on
24.06 Memmory move lantai 5 ke lantai 2, PB panggil 4 bawah on
24.07 Memmory move lantai 5 ke lantai 3, PB panggil 4 bawah on
24.08 Memmory push button panggil lantai 1 limit switch
24.09 Memmory push button panggil lantai 2 atas limit switch
24.10 Memmory push button panggil lantai 2 bawah limit switch
24.11 Memmory push button panggil lantai 3 atas limit switch
24.12 Memmory push button panggil lantai 3 bawah limit switch
24.13 Memmory push button panggil lantai 4 atas limit switch
24.14 Memmory push button panggil lantai 4 bawah limit switch
24.15 Memmory push button panggil lantai 5 limit switch
25.00 Memmory push button tujuan lantai 1 limit switch
25.01 Memmory push button tujuan lantai 2 limit switch
25.02 Memmory push button tujuan lantai 3 limit switch
25.03 Memmory push button tujuan lantai 4 limit switch
25.04 Memmory push button tujuan lantai 5 limit switch
25.05 Memmory panggilan kembali lantai 1 – 5 turun
25.06 Memmory panggilan kembali lantai 5 – 1 naik
25.07 Memmory panggilan kembali lantai 1 – 4 turun
25.08 Memmory panggilan kembali lantai 2 – 5 turun
25.09 Memmory panggilan kembali lantai 5 – 2 naik
25.10 Memmory panggilan kembali lantai 4 – 1 naik

46
3.3.4 Perancangan Perangkat Lunak
Pada pembuatan tugas akhir ini menggunakan 2 perangkat lunak yang digunakan,
yaitu matlab untuk melakukan pengolahan fuzzy logic dan CX Programmer untuk
melakukan pemrograman PLC.
a. Pengolahan fuzzy logic menggunakan Matlab
Seperti pada penjelasan pada tinjauan pustaka fuzzy logic merupakan salah
satu metode dari kecerdasan buatan. Metode fuzzy logic ini digunakan
untuk menentukan prioritas arah tujuan lift. Setelah diketahui prioritas dari
arah tujuan tersebut maka nilai prioritas tersebut akan menjadi acuan untuk
input program PLC.
Gambar 3.7. Contoh perpindahan kotak lift

47
Variabel-variabel yang menjadi bobot pada prioritas arah lift antara lain:
• Jarak tujuan yang akan ditempuh oleh kotak lift.
Jarak tujuan memiliki bobot nilai maksimal adalah 4 (lantai) karena
jarak maksimal terjadi antara lantai 1 menuju lantai 5. Dapat dilihat
pada gambar 3.7. jarak maksimal dicontohkan dengan perpindahan
kotak lift dari posisi awal menuju tujuan, atau dari lantai 5 menuju lantai
1.
• Jarak panggilan kembali.
Jarak panggil kembali memiliki bobot maksimal adalah 3 (lantai) yang
terjadi misalnya ketika kotak lift berada pada lantai 2 dan akan menuju
lantai 1, disaat itu ada panggilan lift dari lantai 5. Pada gambar 3.7. jarak
panggilan kembali memiliki bobot 2, yaitu ketika perpindahan kotak lift
sampai pada lantai 3 ada panggilan kembali di lantai 5.
• Arah panggilan yang dituju oleh kotak lift.
Arah panggilan kotak lift memiliki bobot searah atau tidak searah
terhadap perpindahan kotak lift. arah panggilan pada lantai 1 dan 5
hanya memiliki satu pilihan arah, yaitu atas atau bawah. Sedangkan
pada lantai 2,3 dan 4 memiliki dua pilihan arah yaitu atas dan bawah.
Pada gambar 3.7. dicontohkan panggilan tidak searah terjadi pada lantai
5 dan lantai 2.
• Berat kotak lift ketika diisi dengan penumpang.
Berat maksimal kotak lift memiliki bobot available (masih
memungkinkan menambah penumpang) dan maksimal.

48
Empat variabel inilah yang akan menjadi input pada sistem fuzzy logic yang
digunakan. Untuk metode inferensi yang digunakan adalah metode Sugeno
karena variabel output yang diharapkan adalah berupa konstanta bukan
berupa himpunan fuzzy. Output yang dihasilkan berupa prioritas masing-
masing kondisi dengan nilai bobotnya. Ketika masing-masing kondisi telah
mendapatkan bobotnya, maka akan dilakukan pemanggilan kotak lift
kembali dengan bobot lift lebih dari 1;
49
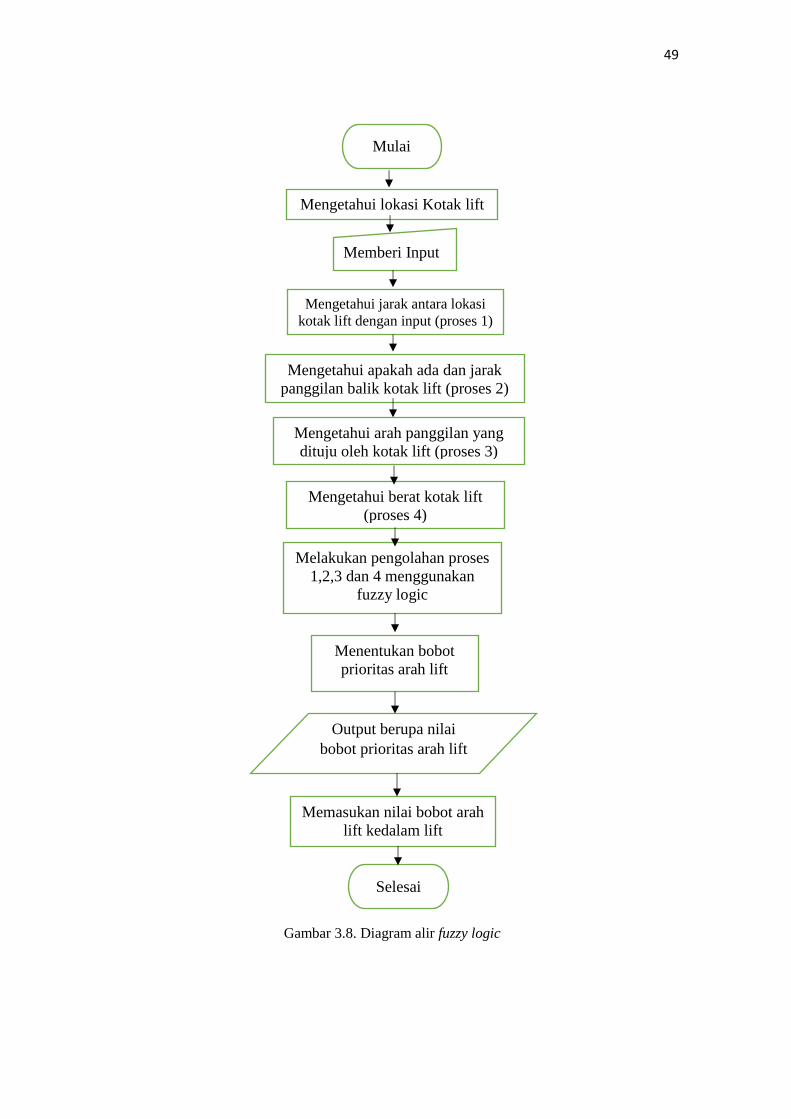
Mulai
Mengetahui lokasi Kotak lift
Memberi Input
Mengetahui jarak antara lokasi
kotak lift dengan input (proses 1)
Mengetahui apakah ada dan jarak
panggilan balik kotak lift (proses 2)
Melakukan pengolahan proses
1,2,3 dan 4 menggunakan
fuzzy logic
Menentukan bobot
prioritas arah lift
Memasukan nilai bobot arah
lift kedalam lift
Selesai
Output berupa nilai
bobot prioritas arah lift
Gambar 3.8. Diagram alir fuzzy logic
Mengetahui berat kotak lift
(proses 4)
Mengetahui arah panggilan yang
dituju oleh kotak lift (proses 3)
50
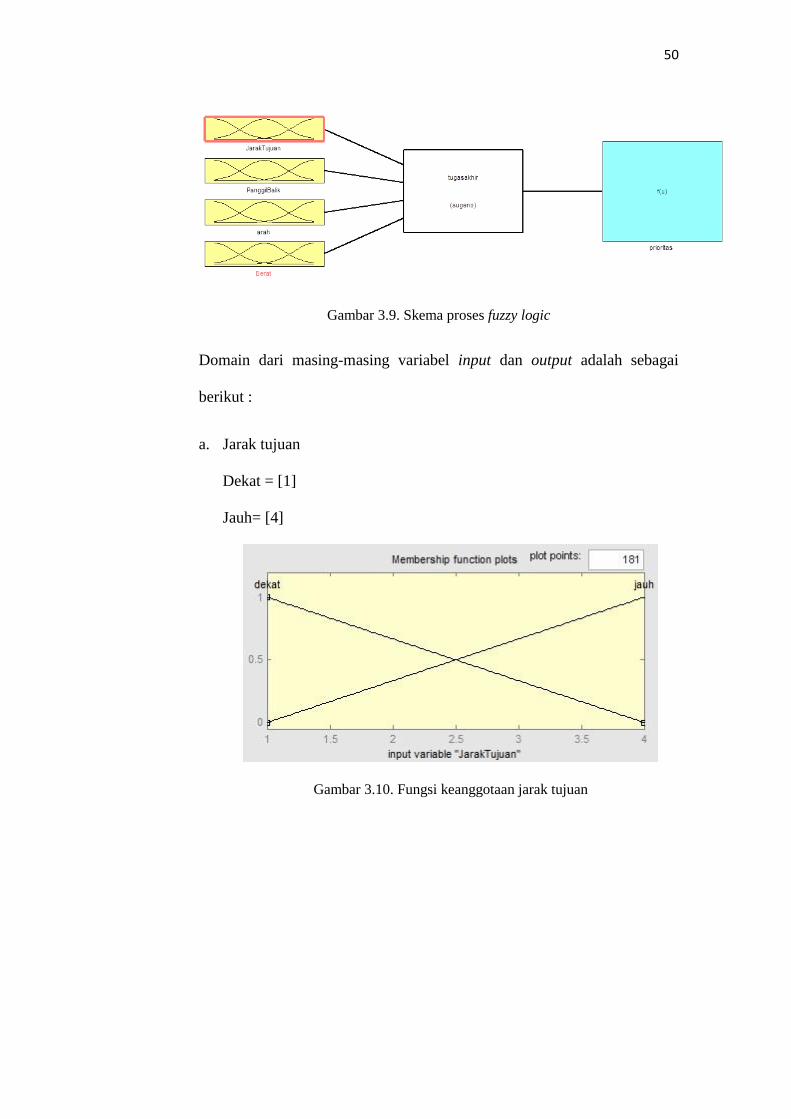
Gambar 3.9. Skema proses fuzzy logic
Domain dari masing-masing variabel input dan output adalah sebagai
berikut :
a. Jarak tujuan
Dekat = [1]
Jauh= [4]
Gambar 3.10. Fungsi keanggotaan jarak tujuan

51
b. Jarak panggilan kembali
Dekat=[1]
Jauh=[3]
Gambar 3.11. Fungsi keanggotaan jarak panggil kembali
c. Arah panggilan kembali yang dituju oleh kotak lift.
Searah=[0]
Tidak searah=[1]
Gambar 3.12. Fungsi keanggotaan arah panggilan kembali yang dituju oleh
kotak lift.

52
d. Berat Kotak lift ketika diisi dengan penumpang.
Available=[0]
Maksimal=[1]
Gambar 3.13. Fungsi keanggotaan Berat kotak lift ketika diisi dengan
penumpang.
e. Prioritas kotak lift kembali
Sangat Tinggi = [1.5];
Tinggi = [1];
Normal = [0.8];
Rendah = [0.6];
Sangat Rendah = [0.3].
Gambar 3.14. Fungsi Keanggotaan Prioritas kotak lift kembali

53
Basis aturan fuzzy nya adalah sebagai berikut :
1. If (JarakTujuan is dekat) and (PanggilBalik is dekat) and (arah is searah)
and (Berat is available) then (prioritas is rendah);
2. If (JarakTujuan is dekat) and (PanggilBalik is jauh) and (arah is searah)
and (Berat is available) then (prioritas is sangat rendah);
3. If (JarakTujuan is jauh) and (PanggilBalik is dekat) and (arah is searah)
and (Berat is available) then (prioritas is sangat tinggi);
4. If (JarakTujuan is jauh) and (PanggilBalik is jauh) and (arah is searah)
and (Berat is available) then (prioritas is normal);
5. If (JarakTujuan is dekat) and (PanggilBalik is dekat) and (arah is tidak
searah) and (Berat is available) then (prioritas is sangat rendah);
6. If (JarakTujuan is dekat) and (PanggilBalik is jauh) and (arah is tidak
searah) and (Berat is available) then (prioritas is sangat rendah);
7. If (JarakTujuan is jauh) and (PanggilBalik is dekat) and (arah is tidak
searah) and (Berat is available) then (prioritas is normal);
8. If (JarakTujuan is jauh) and (PanggilBalik is jauh) and (arah is tidak
searah) and (Berat is available) then (prioritas is sangat rendah);
9. If (JarakTujuan is dekat) and (PanggilBalik is dekat) and (arah is searah)
and (Berat is maksimal) then (prioritas is sangat rendah);
10. If (JarakTujuan is dekat) and (PanggilBalik is jauh) and (arah is searah)
and (Berat is maksimal) then (prioritas is sangat rendah);
11. If (JarakTujuan is jauh) and (PanggilBalik is dekat) and (arah is searah)
and (Berat is maksimal) then (prioritas is sangat rendah);
54
12. If (JarakTujuan is jauh) and (PanggilBalik is jauh) and (arah is searah)
and (Berat is maksimal) then (prioritas is sangat rendah);
13. If (JarakTujuan is dekat) and (PanggilBalik is dekat) and (arah is tidak
searah) and (Berat is maksimal) then (prioritas is sangat rendah);
14. If (JarakTujuan is dekat) and (PanggilBalik is jauh) and (arah is tidak
searah) and (Berat is maksimal) then (prioritas is sangat rendah);
15. If (JarakTujuan is jauh) and (PanggilBalik is dekat) and (arah is tidak
searah) and (Berat is maksimal) then (prioritas is sangat rendah);
16. If (JarakTujuan is jauh) and (PanggilBalik is jauh) and (arah is tidak
searah) and (Berat is maksimal) then (prioritas is sangat rendah).
Output dari proses fuzzy logic digunakan untuk melakukan pengambilan
keputusan terhadap prioritas arah kotak lift sehingga didapatkan
perpindahan kotak lift yang efisien. Pengambilan keputusan pada fuzzy logic
ini menggunakan metode sugeno. Prioritas perpindahan lift hanya akan
dilayani jika bobot prioritas bernilai lebih dari 1. Jika bobot prioritas kurang
dari satu maka perpindahan lift tidak akan dilayani. Berikut contoh
perhitungan menggunakan fuzzy logic. Kotak lift mula-mula berada di lantai
5 dalam keadaan kosong, kemudian ada penumpang masuk dengan tujuan
ke lantai 1. Pada keadaan ini bobot jarak tujuan adalah 4 (jarak antara lantai
5 dan lantai 1). Ketika kotak lift dalam perjalanan menuju lantai 1, ada
panggilan pada lantai 4 dengan arah kebawah sedangkan posisi kotak lift
saat ini sedang di lantai 3. Pada keaadaan ini bobot panggil balik adalah 1
(jarak antara lantai 3 dan lantai 4), bobot arah adalah bernilai 0 karena searah
dan bobot berat adalah 0 karena keadaan kotak lift kosong. Maka didapatkan
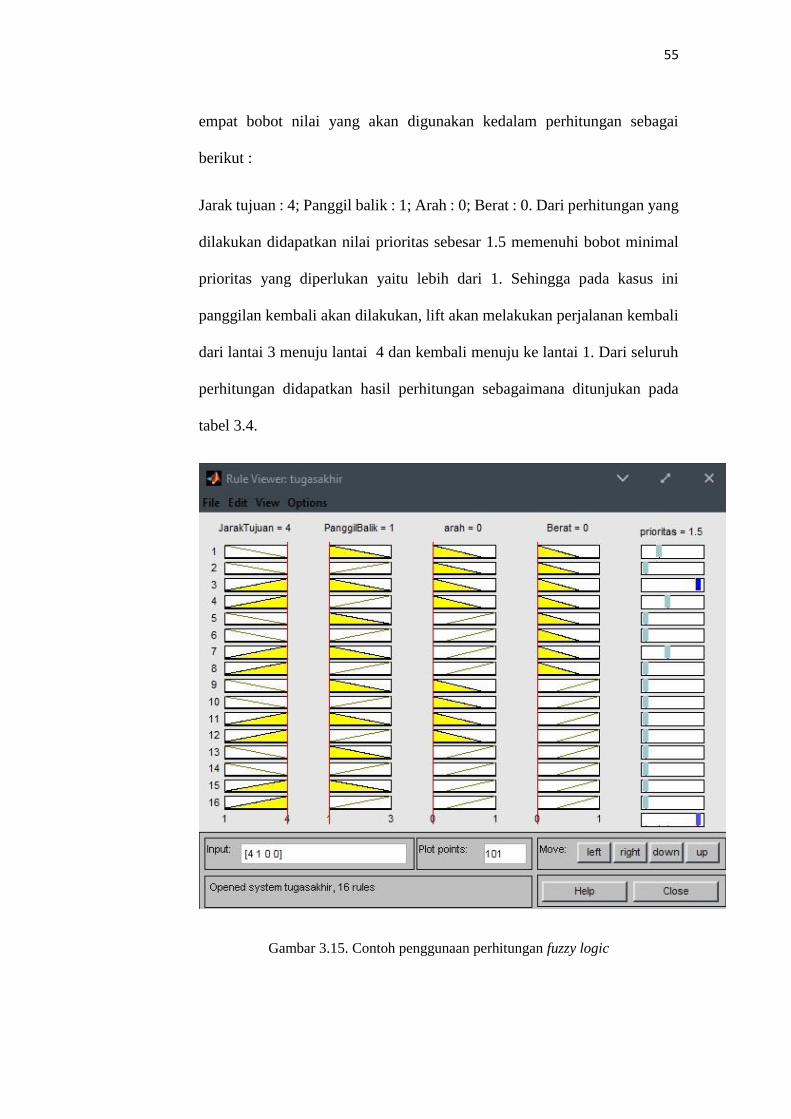
55
empat bobot nilai yang akan digunakan kedalam perhitungan sebagai
berikut :
Jarak tujuan : 4; Panggil balik : 1; Arah : 0; Berat : 0. Dari perhitungan yang
dilakukan didapatkan nilai prioritas sebesar 1.5 memenuhi bobot minimal
prioritas yang diperlukan yaitu lebih dari 1. Sehingga pada kasus ini
panggilan kembali akan dilakukan, lift akan melakukan perjalanan kembali
dari lantai 3 menuju lantai 4 dan kembali menuju ke lantai 1. Dari seluruh
perhitungan didapatkan hasil perhitungan sebagaimana ditunjukan pada
tabel 3.4.
Gambar 3.15. Contoh penggunaan perhitungan fuzzy logic
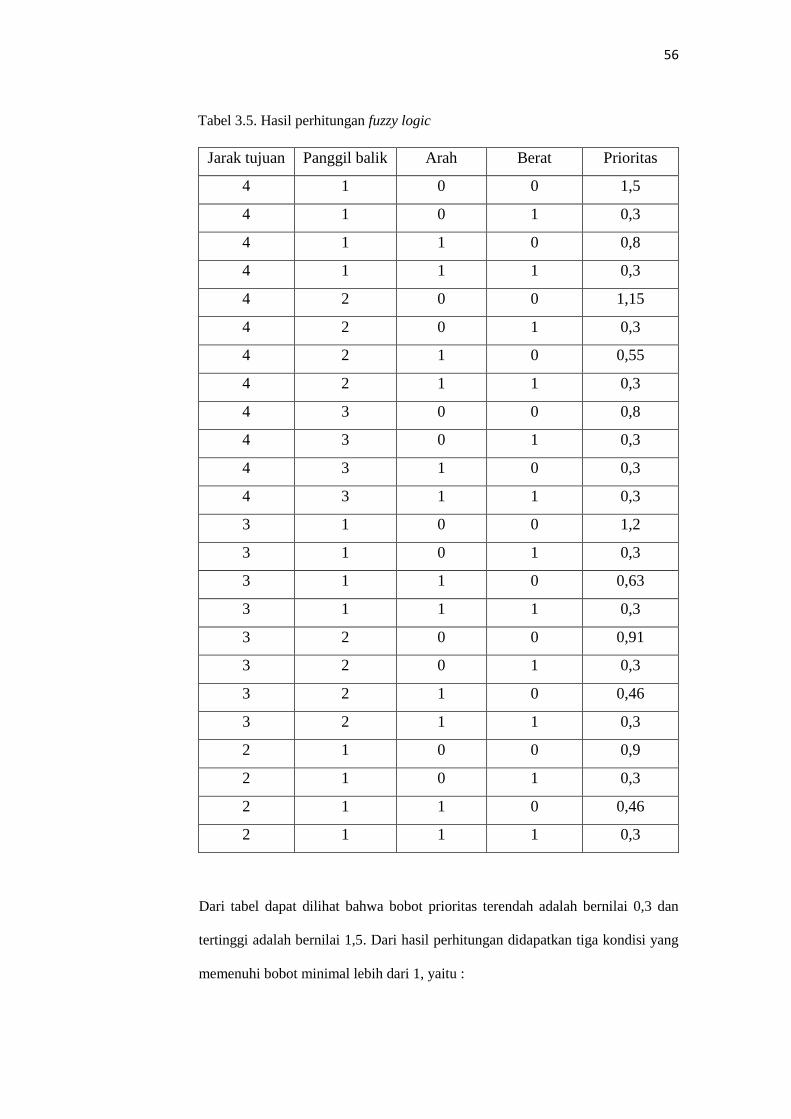
56
Tabel 3.5. Hasil perhitungan fuzzy logic
Jarak tujuan Panggil balik Arah Berat Prioritas
4 1 0 0 1,5
4 1 0 1 0,3
4 1 1 0 0,8
4 1 1 1 0,3
4 2 0 0 1,15
4 2 0 1 0,3
4 2 1 0 0,55
4 2 1 1 0,3
4 3 0 0 0,8
4 3 0 1 0,3
4 3 1 0 0,3
4 3 1 1 0,3
3 1 0 0 1,2
3 1 0 1 0,3
3 1 1 0 0,63
3 1 1 1 0,3
3 2 0 0 0,91
3 2 0 1 0,3
3 2 1 0 0,46
3 2 1 1 0,3
2 1 0 0 0,9
2 1 0 1 0,3
2 1 1 0 0,46
2 1 1 1 0,3
Dari tabel dapat dilihat bahwa bobot prioritas terendah adalah bernilai 0,3 dan
tertinggi adalah bernilai 1,5. Dari hasil perhitungan didapatkan tiga kondisi yang
memenuhi bobot minimal lebih dari 1, yaitu :

57
Tabel 3.6. kondisi yang memenuhi bobot minimal.
Jarak tujuan Panggil balik Arah Berat Prioritas
4 1 1 1 1,5
4 2 1 1 1,15
3 1 1 1 1,2
b. Pemrograman PLC menggunakan CX Programmer
Ada dua metode untuk melakukan programming pada PLC, yaitu melalui
console dan melalui komputer. Pada penelitian ini akan dilakukan
pemrograman PLC menggunakan komputer karena metode ini umum
digunakan ketika melakukan perancangan program. Software yang
digunakan pada PLC Omron CPM2A adalah CX Programmer. Software ini
merupakan software pabrikan Omron.
Gambar 3.16. Tampilan muka CX Programmer

58
Gambar 3.17. Diagram alir kerja PLC
Mulai
Mendeteksi letak kotak lift
Input tujuan
Melakukan pengolahan input
Menjalankan kotak lift ke
tujuan yang ditentukan
Apakah ada input lain
pada lantai yang dilewati?
Apakah kotak lift pernah
melakukan panggilan kembali?
Berhenti lantai yang dilewati jika ada inputan dan
berat tidak maksimal, buka dan tutup pintu lift 5s
Apakah ada input untuk
panggilan kembali?
Berhenti pada tujuan yang
ditentukan dan buka pintu lift 5s
Selesai
tidak
ya
ya
tidak
ya
tidak

59
3.3.5 Pembuatan Alat
Pada tahapan selanjutnya adalah pembuatan alat berdasarkan rancangan yang telah
dibuat. Adapun proses yang dilakukan dalam pembuatan alat adalah:
a. Melakukan pemrograman ladder diagram pada PLC Omron CPM2A.
b. Melakukan trace rangkaian power supply dan driver motor pada PCB.
c. Melakukan pemasangan komponen pada papan PCB.
d. Membuat prototipe lift sesuai rancangan yang telah di rencanakan.
e. Menggabungkan tiap bagian menjadi satu kesatuan sistem.
3.3.6 Pengujian Alat
Pengujian terhadap hasil rancangan lift ini akan dilakukan dengan menggabungkan
prototipe lift, power suppy, driver supply serta kontrol PLC menjadi satu. Pengujian
dilakukan untuk mengamati apakah setiap bagian dapat beroperasi dalam sistem
lift.

V. SIMPULAN DAN SARAN
5.1. Simpulan
Simpulan yang dapat diambil dari penelitian ini adalah sebagai berikut :
1. Telah terealisasi lift cerdas 5 lantai dengan menggunakan PLC CPM2A
sebagai pengendali utama.
2. Penggunaan fuzzy logic pada sistem lift sebagai kecerdasan buatan mampu
memberikan efisiensi pergerakan lift.
3. Sistem cerdas lift dapat membandingkan masing-masing input yang masuk
dan mengambil keputusan sesuai data yang didapat dari konsep fuzzy logic.
5.2. Saran
Perlu dilakukan penelitian lebih lanjut untuk mendapatkan program PLC yang lebih
efisien ketika banyak logika input yang dimasukan dalam satu lantai. Selain itu perlu
ada penelitian untuk mengetahui efisiensi energi yang digunakan dan sistem ini dapat
ditambahkan human machine interface untuk mempermudah penggunaannya.

DAFTAR PUSTAKA
[1] Setiawan, Iwan. 2006. Programmable Logic Controller (PLC) dan Teknik
Perancangan Sistem Kontrol. Yogyakarta: Andi Publishing.
[2] Wicaksono, Handy. 2009. Programmable Logic Controller Teori,
Pemrograman dan Aplikasinya dalam Otomasi Sistem. Yogyakarta: Graha
Ilmu.
[3] Bolton, William. 2004. Programmable Logic Controller (PLC) edisi ketiga.
Jakarta: Erlangga.
[4] Yudamson, Afri. 2011. Rancang Bangun Model Lift Cerdas 3 Lantai Dengan
Menggunakan PLC Omron Zen 20C1AR-A-V2. Bandarlampung: Universitas
Lampung.
[5] Wati, Dwi Ana Ratna. 2011. Sistem Kendali Cerdas. Yogyakarta: Graha
Ilmu.
[6] Kusumadewi, Sri. 2003. Artificial Intelliegence (Teknik dan Aplikasinya).
Yogyakarta: Graha Ilmu.
[7] Prabowo Pudjo Widodo, dkk. 2012. Penerapan Soft Computing dengan
Matlab. Bandung: Rekayasa Sains.
[8] Arindya, Radita. 2013. Penggunaan dan Pengaturan Motor Listrik.
Yogyakarta: Graha Ilmu.