rancang bangun alat peraga sandi …digilib.unila.ac.id/30603/12/skripsi tanpa pembahasan.pdfrancang...
TRANSCRIPT
RANCANG BANGUN ALAT PERAGA SANDI SEMAPHORE DAN SANDI
MORSE BERBASIS MIKROKONTROLER ARDUINO MEGA 2560
(Skripsi)
Oleh
SANDI ALFINO
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018
ABSTRAK
RANCANG BANGUN ALAT PERAGA SANDI SEMAPHORE DAN SANDI
MORSE BERBASIS MIKROKONTROLER ARDUINO MEGA 2560
Oleh
SANDI ALFINO
Alat peraga sandi Semaphore dan sandi Morse merupakan alat yang dibutuhkan
bagi pendidik atau pembina ektrakurikuler Pramuka. Mempelajari sandi
Semaphore dan sandi Morse membutuhkan waktu pemahaman dan latihan yang
cukup lama karena butuh daya ingat dan pemahaman yang lebih.
Pada Penelitian ini dilakukan rancang bangun alat peraga sandi Semaphore dan
sandi Morse berbasis mikrokontroler Arduino Mega 2560. Perangkat ini akan
memeragakan sandi Semaphore bendera dan sandi Morse bunyi dengan input
menggunakan PS/2 Keyboard. Pada sandi Semaphore gerakan dilakukan dengan
dua buah motor servo continuous DS-04 NFC sebagai lengan kanan dan kiri
sedangkan sandi Morse keluaran mengunakan buzzer aktif.
Hasil dari pengujian sandi Semaphore menunjukan bahwa sudut yang dihasilkan
tidak presisi. Rata-rata waktu yang dibutuhkan setiap huruf sandi Semaphore
adalah 3,63 detik dengan rata-rata standar deviasi 0,0757 detik. Adanya deviasi
dan sudut yang tidak presisi karena motor ini memiliki karakteristik berbeda
setiap motor. Sementara itu dari pengujian sandi Morse menunjukan bahwa rata-
rata waktu yang dibutuhkan setiap huruf Morse dalam keadaan normal adalah
0,67 detik dengan rata-rata standar deviasi 0,0791 detik, deviasi ini dikarena
kesalahan dalam pengukuran. Namun secara sistem keseluruhan sudah mampu
melakukan sandi Semaphore dan sandi Morse yang diharapkan.
Kata kunci: Arduino Mega 2560, Servo Continuous, Buzzer, Semaphore dan
Morse
ABSTRACT
SEMAPHORE CODE AND MORSE CODE PROPS DESIGN BASED ON
ARDUINO MEGA 2560 MICROCONTROLLER
by
SANDI ALFINO
The Semaphore code and Morse code props are the tools needed for educators or
scout extracurricular builders. Studying the Semaphore code and Morse code
takes a long time to understand and practice because it takes more memory and
understanding.
In this research, Semaphore code and Morse code props is designed based on
Arduino Mega 2560 microcontroller. This device will demonstrate the password
of flag Semaphore and Morse code sound with input using PS/2 keyboard. In the
Semaphore code, the motion is performed with two continuous servo motors DS-
04 NFC as the right and left arm while the Morse code output uses active buzzer.
The result of Semaphore code testing shows that the resulting angle is not
precision. The average time taken for each letter of the Semaphore code is 3.63
seconds with an average standard deviation of 0.0757 seconds. The presence of
deviations and angles are not precision because each motors have different
characteristics. Meanwhile, Morse code testing shows that the average time
required for each Morse under normal circumstances is 0.67 seconds with an
average standard deviation of 0.0791 seconds, this deviation due to the error in
measurement. However, the whole system is capable of performing the expected
Semaphore code and Morse code.
Keywords: Arduino Mega 2560, Servo Continuous, Buzzer, Semaphore and
Morse
RANCANG BANGUN ALAT PERAGA SANDI SEMAPHORE DAN SANDI
MORSE BERBASIS MIKROKONTROLER ARDUINO MEGA 2560
Oleh
SANDI ALFINO
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar
SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018
RIWAYAT HIDUP
Penulis dilahirkan di Bandar Lampung, pada tanggal 13 April 1992, sebagai anak
ketiga dari empat bersaudara, dari Bapak Herman Sofyan dan Ibu Nurhayati.
Penulis menyelesaikan pendidikan Sekolah Dasar di SD Negeri 2 Way Halim
Permai, Bandar Lampung pada tahun 2004, Sekolah Menengah Pertama di MTS
Negeri 2 Bandar Lampung pada tahun 2007, dan Sekolah Menengah Atas di SMA
Gajah Mada Bandar Lampung pada tahun 2010.
Pada tahun 2010, Penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro
Fakultas Teknik Unkiversitas Lampung melalui jalur SNMPTN. Aktif di Unit
Kegiatan Mahasiswa Pramuka Unila sebagai Ketua UKM Pramuka pada tahun
2012-2013 dan Pemangku Adat pada tahun 2013-2014 serta pada tahun 2015
pernah melakukan kerja praktik di PT. Semen baturaja (Persero) tbk, Pabrik
Panjang.
Kupersembahkan karyaku ini kepada :
Allah SWT , Dzat yang telah menciptakanku dengan
harapan menjadi nilai ibadah disisi-Nya.
Ibu dan Bapak tercinta, sosok idola yang sangat
menginspirasi dan sebagai wujud baktiku.
Uni Yesti, Abang Rofi dan Adikku Sakti sebagai tanda
sayangku atas do’a dan dukungannya kelak kitalah
Si “pambangkik batang tarandam” itu.
Guru-guruku dan dosen-dosenku, terima kasih untuk setiap
ilmu yang telah diberikan.
Saudara-saudaraku di Racana Raden Intan – Puteri
Silamaya, DKC Bandar Lampung dan DKD Lampung yang
telah memberikan pengalaman dan kenangan.
Adik-adik binaanku pasukan Jendral Sudirman dan Dewi
Sartika (SMPN 2 Bandar Lampung) yang telah memberikan
do’a dan dukungannya.
Serta tak lupa ku persembahkan kepada Almamaterku
tercinta, semoga kelak berguna dikemudian hari.
“Maka Nikmat Tuhan yang mana lagi, yang akan kau
dustakan”
(QS. Ar-rahman)
“Sebaik-baiknya manusia adalah yang bermanfaat untuk
orang lain”
(Nabi Muhammad SAW)
“Apalah artinya hidup bila manusia telah kehilangan
kemanusiaannya”
(Sandi Racana Putra Saburai)
“Menjadi orang penting itu baik tapi lebih penting menjadi
orang baik dan tidak ada orang baik yang mengatakan
dirinya baik”
(Anonim)
“Janganlah menjadi lilin yang hanya menerangi sesaat
tetapi mengorbankan diri sendiri, jadilah matahari yang
menjadi sumber energy dan beribu manfaat meskipun selalu
dijauhi”.
(Sandi Alfino)
SANWACANA
Alhamdulillah, puji syukur penulis tujukan kehadiran Allah Subhanahu Wa Ta’ala
atas segala rahmat dan hidayah yang diberikan sehingga penulis dapat
menyelesaikan skripsi tugas akhir yang berjudul “Rancang Bangun Alat Peraga
Sandi Semaphore dan Sandi Morse Berbasis Arduino Mega 2560”. Penyusunan
skripsi merupakan syarat memperoleh gelar Sarjana Teknik pada Jurusan Teknik
Elektro Fakultas Teknik Universitas Lampung.
Dalam penyusunan skripsi ini Penulis banyak mendapat bantuan baik moral
maupun material dari berbagai pihak. Untuk itu pada kesempatan ini, Penulis ingin
menyampaikan ucapan terima kasih kepada:
1. Bapak Prof. Dr. Ir. Hasriadi Mat Akin, M.P, selaku Rektor Universitas
Lampung.
2. Bapak Prof. Dr. Drs. Suharno, M.Sc., selaku Dekan Fakultas Teknik Universitas
Lampung.
3. Dr. Ardian Ulvan, S.T., M.Sc., selaku Ketua Jurusan Teknik Elektro
Universitas Lampung.
4. Bapak Dr. Herman Halomoan, S.T., M.T., selaku Sekretaris Jurusan Teknik
Elektro Universitas Lampung dan jajaran staf administrasi Jurusan Teknik
Elektro Universitas Lampung.
5. Bapak Syaiful Alam, S.T., M.T., selaku Dosen Pembimbing I dan Bapak Dr.
Eng. F.X. Arinto Setyawan, S.T., M.T., Selaku Dosen Pembimbing II yang
telah memberikan bimbingan, arahan dan saran serta kritik membangun dalam
penyelesaian tugas akhir ini.
6. Ibu Herlinawati, S.T.,M.T., selaku Dosen Penguji yang telah memberikan
pelajaran, kritik dan saran dalam penyelesaian tugas akhir ini.
7. Seluruh Dosen Jurusan Teknik Elektro atas bimbingan yang penuls peroleh
selama perkuliahan.
8. Semua teman – teman Teknik Elektro angkatan 2010 yang selalu memberikan
dukungan dan kebahagian selama ini.
9. Teman-teman seperjuangan disetiap tempat dan waktu, serta seluruh pihak yang
telah membantu dan mendukung Penulis dalam segala hal yang tidak dapat
disebutkan satu per satu.
Semoga Allah SWT membalas kebaikan mereka terhaadap Penulis dan
semogaskripsi ini berguna.
Bandar Lampung, Februari 2018
Penulis
Sandi Alfino
i
DAFTAR ISI
Halaman
DAFTAR ISI ................................................................................................. i
DAFTAR TABEL ......................................................................................... iii
DAFTAR GAMBAR .................................................................................... v
I. PENDAHULUAN .................................................................................... 1
1.1 Latar Belakang .................................................................................... 1
1.2 Tujuan Penelitian ................................................................................ 2
1.3 Manfaat Penelitian .............................................................................. 3
1.4 Rumusan Masalah .............................................................................. 3
1.5 Batasan Masalah ................................................................................. 3
1.6 Hipotesis ............................................................................................. 4
1.7 Sistematika Penulisan ......................................................................... 4
II. TINJAUAN PUSTAKA ........................................................................... 6
2.1 Semaphore .......................................................................................... 6
2.2 Sandi Morse ........................................................................................ 8
2.3 Arduino ............................................................................................... 10
2.4 Motor Servo ........................................................................................ 13
ii
III. METODE PENELITIAN ....................................................................... 19
3.1 Waktu dan Tempat Penelitian .......................................................... 19
3.2 Alat dan Bahan ................................................................................. 19
3.3 Spesifikasi Sistem ............................................................................ 20
3.4 Metode Penelitian ............................................................................ 20
IV. HASIL DAN PEMBAHASAN .............................................................. 25
4.1 Prinsip Kerja Alat ............................................................................ 25
4.2 Pengujian Alat .................................................................................. 26
4.2.1 Pengujian Motor Servo DS-04 NFC ....................................... 26
4.2.2 Pengujian Buzzer ..................................................................... 28
4.2.3 Pengujian PS/2 Keyboard ....................................................... 29
4.2.4 Pengujian Sistem Peraga Sandi Semaphore ............................ 29
4.2.5 Pengujian Sistem Peraga Sandi Morse ................................... 39
4.3 Diagram Alir Sistem Keseluruhan ................................................... 44
V. KESIMPULAN DAN SARAN .............................................................. 47
5.1 Kesimpulan ...................................................................................... 47
5.2 Saran ................................................................................................ 48
DAFTAR PUSTAKA
LAMPIRAN
iii
DAFTAR TABEL
Tabel Halaman
2.1 Spesifikasi Arduino Mega 2560 .......................................................... 13
3.1 Alat dan Bahan .................................................................................... 19
4.1 Hasil Pengujian Motor Servo DS-04 NFC Tanpa Lengan ................... 27
4.2 Data Pengujian Waktu Sandi Semaphore pada tiap huruf ................... 30
4.3 Perhitungan Standar Deviasi Waktu Huruf A Semaphore .................. 31
4.4 Seluruh Standar Deviasi Waktu Semaphore ........................................ 32
4.5 Pengukuran Sudut Peragaan Sandi Semaphore pada Motor Kanan .... 34
4.6 Pengukuran Sudut Peragaan Sandi Semaphore pada Motor Kiri ........ 35
4.7 Penghitungan Standar Deviasi Sudut Peragaan Sandi Morse Huruf A 37
4.8 Standar Deviasi Sudut Peragaan Sandi Semaphore pada Motor Kanan 38
4.9 Standar Deviasi Sudut Peragaan Sandi Semaphore pada Motor Kiri ... 38
4.10 Pengukuran Waktu pada Setiap Huruf Sandi Morse ........................... 40
4.11 Perhitungan Standar Deviasi Waktu Huruf A Morse .......................... 41
4.12 Perhitungan Keseluruhan Standar Deviasi Huruf pada Sandi Morse ... 42
iv
DAFTAR GAMBAR
Gambar Halaman
2.1 Simbol Huruf Sandi Semaphore ........................................................ 7
2.2 Simbol Huruf Sandi Morse ............................................................... 9
2.3 Board Arduino Mega 2560 R3 .......................................................... 12
2.4 Pin Out Kabel Motor Servo .............................................................. 14
2.5 Kontruksi Motor Servo ...................................................................... 16
3.1 Diagram Alir Penelitian .................................................................... 21
3.2 Blok Diagram Alat Peraga ................................................................ 22
3.3 Kerangka Model Rancangan Alat Peraga Sandi Semaphore dan
Morse .................................................................................................. 23
4.1 Rancang Bangun Alat Peraga Sandi Semaphore dan Sandi Morse
Berbasis Arduino Mega 2560 ............................................................ 25
4.2 Grafik Waktu Rata – Rata Setiap Huruf Pada Sandi Semaphore ....... 31
4.3 Grafik Standar Deviasi waktu pada Semaphore ................................ 33
4.4 Grafik Sudut Motor Kanan pada Sandi Semaphore .......................... 36
4.5 Grafik Sudut Motor Kiri pada Sandi Semaphore .............................. 36
4.6 Grafik Waktu Rata – Rata Setiap Huruf pada Sandi Morse ............... 41
4.7 Grafik Standar Deviasi Waktu Setiap Huruf pada Sandi Morse ........ 43
4.8 Bentuk Alat Peraga Sandi Semaphore dan Morse ............................. 44
4.9 Diagram Alir Sistem Keseluruhan ..................................................... 45
I. PENDAHULUAN
1.1. Latar Belakang Masalah
Perkembangan ilmu pengetahuan dan teknologi dewasa ini telah maju dengan
pesat seiring kemajuan jaman. Misalnya dalam dunia pendidikan, untuk
mengajarkan suatu materi dibutuhkan alat peraga agar mudah dipahami oleh
peserta didik. Alat peraga sandi semaphore dan sandi morse merupakan salah
satu alat yang dibutuhkan bagi pendidik atau pembina ektrakurikuler Pramuka.
Terlebih saat kurikulum 2013 yang menjadikan ekstrakurikuler pramuka sebagai
ektrakurikuler wajib.
Untuk mempelajari sandi semaphore dan sandi morse membutuhkan waktu
pemahaman dan latihan yang cukup lama karena butuh daya ingat dan
pemahaman yang lebih. Pembina pramuka yang sedikit menjadikan alat ini sangat
berguna untuk mengajarkan sandi semaphore dan sandi morse dengan mudah.
Penelitian tentang alat peraga sandi semaphore sebelumnya sudah dilakukan oleh
Yanda Pranapis dan Rahmad Hadi Darmawan (Pranapis, Darmawan, 2015) yang
merancang alat peraga sandi semaphore dan Mardiansyah (Mardiyansyah, 2014)
yang merancang Robot semaphore dengan input sandi morse untuk pembelajaran
siswa pramuka. Dari kedua penelitian tersebut pembuatan sandi semaphore
2
sebagai keluaran sistem dengan input menggunakan keyboard dan sandi morse.
Oleh karena itu penulis ingin mengembangkan penelitian diatas dengan
merancang sistem yang dapat memperagakan sandi semaphore dan sandi morse
dengan input keyboard berbasis arduino.
Berdasarkan latar belakang inilah penulis membuat alat peraga sandi semaphore
dan sandi morse berbasis Arduino. Harapannya alat ini dapat mempermudah
pembina pramuka dalam mengajarkan sandi semaphore dan sandi morse dengan
lebih mudah sekaligus menjadi daya tarik peserta didik untuk memahami dan
mempelajari sandi semaphore dan sandi morse.
1.2. Tujuan Penelitian
Tujuan dari penelitian tugas akhir ini adalah sebagai berikut:
1. Merancang dan membuat alat peraga sandi semaphore berbasis Arduino.
2. Merancang dan membuat alat peraga sandi morse berbasis Arduino.
3. Mengetahui waktu rata-rata setiap huruf pada sandi semaphore
menggunakan motor servo continuous.
4. Mengetahui waktu rata-rata setiap huruf pada sandi morse menggunakan
buzzer.
3
1.3. Manfaat Penelitian
Manfaat dari penelitian tugas akhir ini diharapkan dapat digunakan sebagai alat
peraga sandi semaphore dan sandi morse bagi Pembina Pramuka ataupun guru
yang mengajarkann ektrakurikuler pendidikan kepramukaan di sekolah.
1.4. Rumusan Masalah
Dengan permasalahan yang telah dijelaskan pada bagian latar belakang, rumusan
masalah pada penelitian tugas akhir ini yaitu :
1. Bagaimana merancang dan membuat sistem yang dapat memaragakan
sandi semaphore dan sandi morse dengan berbentuk robot.
2. Mengatur motor servo continuous menjadi gerakan sandi semaphore
1.5. Batasan Masalah
Adapun batasan masalah pada penelitian tugas akhir ini adalah sebagai berikut :
1. Hanya merancang alat peraga sandi semaphore menggunakan bendera dan
sandi morse menggunakan bunyi.
2. Input yang digunakan hanya setiap huruf untuk diubah menjadi perintah
dalam bentuk sandi semaphore bendera dan sandi morse bunyi.
3. Input perintah menggunakan PS/2 keyboard.
4. Alat peraga sandi semaphore dan sandi morse ini hanya digunakan untuk
media pembelajaran di dalam ruangan.
4
1.6. Hipotesis
Sistem yang dirancang diduga dapat memperagakan gerakan sandi semaphore dan
sandi morse dengan input menggunakan PS/2 keyboard dan output sandi
semaphore berupa gerakan motor servo dan output sandi morse berupa suara
menggunakan buzzer.
1.7. Sistematika Penulisan
Untuk memudahkan penulisan dan pemahaman mengenai materi tugas akhir ini,
maka tulisan ini dibagi menjadi lima bab, yaitu :
BAB I PENDAHULUAN
Memuat latar belakang, tujuan, manfaat penelitian, batasan masalah, rumusan
masalah, hipotesis dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Berisi tentang teori dasar yang menunjang dalam penelitian seperti, sandi
semaphore, sandi morse, motor servo continous.
BAB III METODE PENELITIAN
Menjelaskan langkah-langkah yang akan dilakukan dalam penelitian, diantaranya
waktu dan tempat penelitian, alat dan bahan, serta prosedur penelitian.
BAB IV HASIL DAN PEMBAHASAN
Menjelaskan hasil dari pengujian dan pengambilan data, serta analisa hasil
pengujian tersebut.
5
BAB V KESIMPULAN DAN SARAN
Memuat simpulan yang diperoleh dari pembuatan dan pengujian alat, dan saran-
saran untuk pengembangan lebih lanjut.
DAFTAR PUSTAKA
LAMPIRAN
6
II. TINJAUAN PUSTAKA
2.1. Semaphore
Semaphore adalah suatu cara untuk mengirim dan menerima berita dengan
menggunakan bendera, dayung, batang, tangan kosong atau dengan sarung tangan.
Informasi yang didapat dibaca melalui posisi bendera atau tangan. Namun kini
yang umumnya digunakan adalah bendera, yang dinamakan bendera semaphore.
Pengiriman sandi melalui bendera semaphore ini menggunakan dua bendera, yang
masing-masing bendera tersebut berukuran 45 cm x 45 cm. Bentuk bendera yang
persegi merupakan penggabungan dua buah segitiga sama kaki yang berbeda
warna. Warna yang digunakan sebenarnya bisa bermacam-macam, namun yang
lazim digunakan adalah warna merah dan kuning, dimana letak warna merah
selalu berada dekat tangkai bendera (Sunardi, 2013).
Semaphore digunakan dalam komunikasi kelautan. Semaphore merupakan salah
satu bentuk isyarat menggunakan bendera yang lazim digunakan ketika perang
sipil di Amerika Serikat. Ketika itu bendera yang digunakan berwarna putih dan
oranye serta hanya terdiri dari satu bendera saja. Orang yang ditugaskan
melakukan isyarat bendera ini biasanya berdiri di sebuah tempat yang tinggi atau
di lantai yang tingginya sekitar 2-3 meter dari permukaan tanah.
7
Penemu Semaphore Claude Chappe (25 Desember 1763 - 23 Januari 1805) adalah
seorang penemu Perancis yang pada tahun 1792 menunjukkan praktis sistem
semaphore yang akhirnya membentang seluruh Perancis. Ini adalah sistem
telekomunikasi praktis pertama pada zaman industri, membuat Chappe sang
maestro telekomunikasi pertama dengan "internet mekanis."
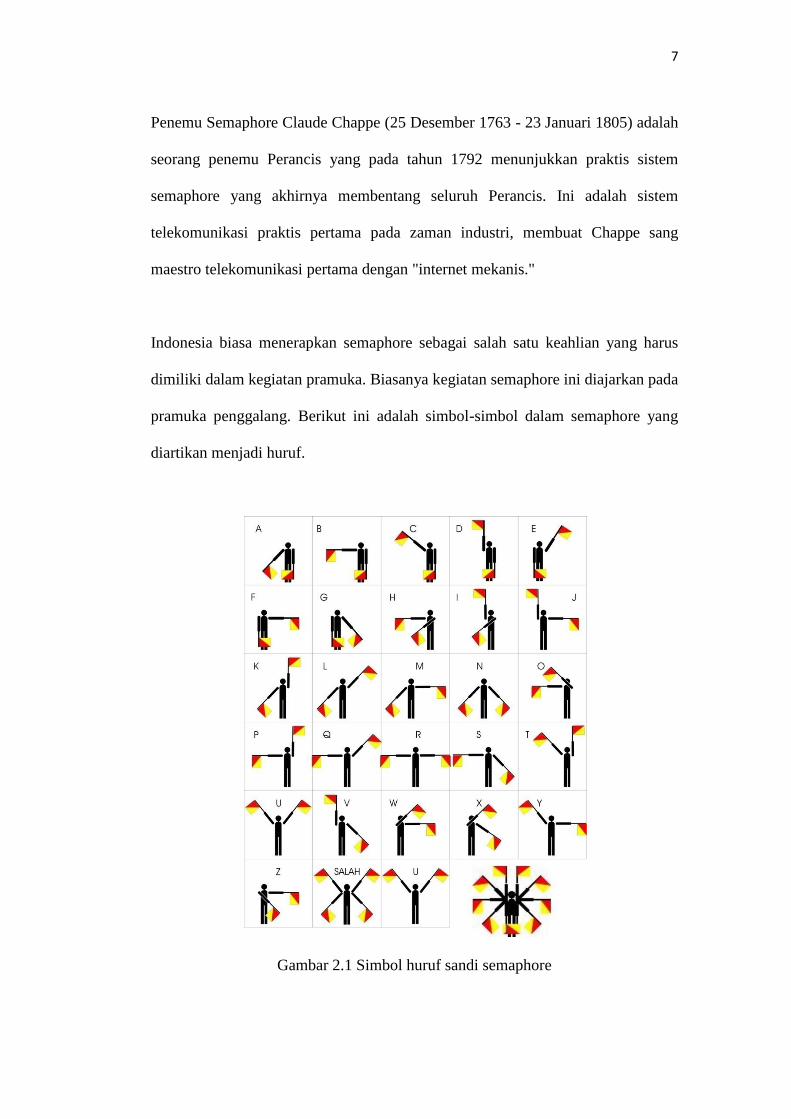
Indonesia biasa menerapkan semaphore sebagai salah satu keahlian yang harus
dimiliki dalam kegiatan pramuka. Biasanya kegiatan semaphore ini diajarkan pada
pramuka penggalang. Berikut ini adalah simbol-simbol dalam semaphore yang
diartikan menjadi huruf.
Gambar 2.1 Simbol huruf sandi semaphore
8
2.2. Sandi Morse
Kode Morse atau ‘Sandi Morse’ adalah sistem representasi huruf, angka, tanda
baca dan sinyal dengan menggunakan kode titik dan garis yang disusun mewakili
karakter tertentu pada alfabet atau sinyal (pertanda) tertentu yang disepakati
penggunaannya di seluruh dunia. Kode Morse diciptakan oleh Samuel F.B. Morse
dan Alfred Vail pada tahun 1835 (Sunardi, 2013).
Kode morse pertama kali digunakan secara luas setelah teknologi radio dan
telegrafi berkembang pesat di akhir abad ke-19. Pada awal-awal penggunaannya
kode morse dipakai untuk pengiriman pesan antara dua tempat yang terpisah jauh
dengan menggunakan teknologi radio CW (constant wave) atau gelombang tetap
sebelum ditemukannya komunikasi radio dengan suara. Hal ini dikarenakan radio
pada masa awalnya masih pada penggunaan gelombang rendah, yang tidak
mampu mengirimkan gelombang suara, namun dapat mengirimkan bunyi
sederhana seperti bunyi panjang-pendek dari kode morse.
Durasi pengiriman kode morse diukur dalam satuan Kata Per Menit (word per
minute; disingkat WPM), dan berkisar di antara 8-50 WPM di dalam
penggunaannya secara umum melalui jaringan radio atau media lain. Kode morse
juga digunakan dan dipelajari di dunia kepramukaan atau kepanduan. Dalam
dunia kepramukaan kode morse disampaikan menggunakan senter atau peluit
pramuka. Kode morse disampaikan dengan cara menuip peluit dengan durasi
pendek untuk mewakili titik dan meniup peluit dengan durasi panjang untuk
mewakili garis.
9
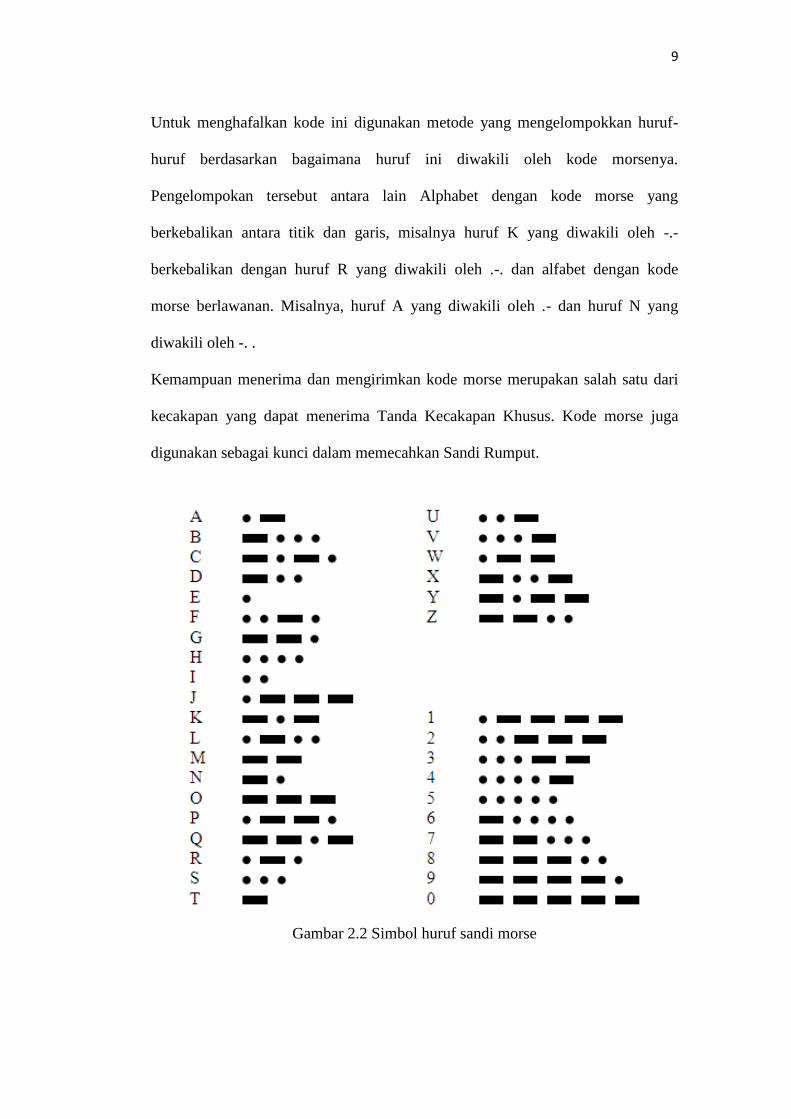
Untuk menghafalkan kode ini digunakan metode yang mengelompokkan huruf-
huruf berdasarkan bagaimana huruf ini diwakili oleh kode morsenya.
Pengelompokan tersebut antara lain Alphabet dengan kode morse yang
berkebalikan antara titik dan garis, misalnya huruf K yang diwakili oleh -.-
berkebalikan dengan huruf R yang diwakili oleh .-. dan alfabet dengan kode
morse berlawanan. Misalnya, huruf A yang diwakili oleh .- dan huruf N yang
diwakili oleh -. .
Kemampuan menerima dan mengirimkan kode morse merupakan salah satu dari
kecakapan yang dapat menerima Tanda Kecakapan Khusus. Kode morse juga
digunakan sebagai kunci dalam memecahkan Sandi Rumput.
Gambar 2.2 Simbol huruf sandi morse
10
2.3. Arduino
Arduino merupakan suatu produk modul pengendali elektronik berbasis open
source yang menggunakan mikrokontroler Atmel AVR dan memiliki software
pemrograman sendiri. Proyek Arduino pertama kali dicetuskan pada tahun 2005 di
Ivre, Italia. Pembuatan Arduino yang merupakan open source ini melibatkan
beberapa tim pengembang. Massimo Banzi dan David Cuartielles tampil sebagai
founder proyek ini, lalu untuk wiring ditangani oleh Hernando Barragan yang
merupakan programmer dan artis asal kolombia. Lalu ada juga IDE (Integrated
Development Environment) yang diciptakan oleh Casey Reas dan Ben Fry. Selain
itu, ada beberapa programmer lain yang terlibat seperti Tom Igoe, Giancula
Martino, David Mellis, dan Nicholas Zambetti.
Pada tahun 2014, Arduino board sudah tersedia dalam berbagai jenis dan pilihan
antara lain Arduino Uno, Arduino Mega 2560, Arduino Mega ADK, Arduino
Duemilanove, Arduino Leonardo, Arduino Nano, Arduino Diecimila, Arduino
FIO, dan Arduino lilypad. Bahkan, Arduino juga sudah menulis board terbaru
mereka yang berbasis mikrokontroler 32 bit, yaitu Arduino Due.
Selain itu, Arduino juga memiliki perangkat tambahan yang disebut shield. Shield
adalah perangkat tambahan yang dapat dipasang langsung pada board Arduino.
Dengan shield ini, pengguna tidak kesulitan membuat rangkaian baru yang
melakukan soldering jika ingin membuat perangkat tambahan untuk Arduino,
karena shield sudah didesain agar sesuai dengan pin-pin yang ada pada board
Arduino. Contoh Arduino antara lain : Ethernet shield yang digunakan agar
11
Arduino dapat terkoneksi seluler, Xbee yang digunakan agar beberapa Arduino
berkomunikasi secara wireless, dan masih banyak lagi.
Pemrograman Arduino menggunakan bahasa C++ yang telah dipermudah dan
disederhanakan melalui library. Untuk menulis program ke dalam Arduino,
digunakan software Arduino IDE. Software ini merupakan penggabungan antara
bahasa C++ dan Java. Software Arduino IDE ini dapat dipasang di berbagai
sistem operasi seperti : LINUX, MacOS, dan Windows. Secara garis besar,
software Arduino IDE terdiri dari tiga bagian, yaitu :
1. Editor program, berfungsi untuk menulis dan merubah program. Listing
program yang dibuat pada Arduino IDE disebut sketch.
2. Compiler, berfungsi untuk mengubah kode program yang kita tulis
kedalam kode biner, sehingga dapat dipahami oleh mikrokontroler.
3. Uploader, berfungsi untuk memasukkan program yang kita tulis kedalam
mikrokontroler.
Struktur perintah pada Arduino secara garis besar terdiri dari dua bagian yaitu
void setup dan void loop. Void setup berisi perintah yang akan dieksekusi hanya
satu kali sejak pertama kali Arduino dihidupkan atau di-reset, sedangkan void
loop berisi perintah yang akan dieksekusi berulang-ulang selama Arduino dalam
keadaan menyala (Artanto, 2012).
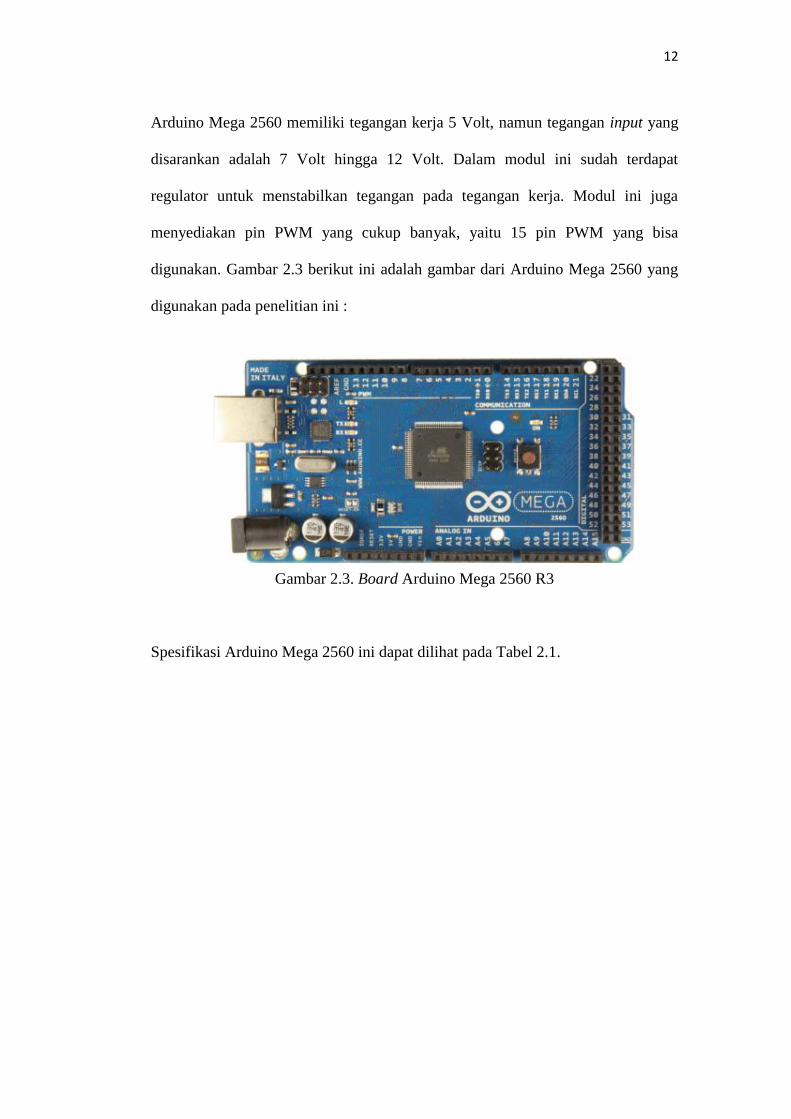
Tipe Arduino yang akan digunakan penulis disini adalah Arduino Mega 2560.
Modul ini memakai mikrokontroler Atmega 2560 sebagai inti pemrosesannya.
12
Arduino Mega 2560 memiliki tegangan kerja 5 Volt, namun tegangan input yang
disarankan adalah 7 Volt hingga 12 Volt. Dalam modul ini sudah terdapat
regulator untuk menstabilkan tegangan pada tegangan kerja. Modul ini juga
menyediakan pin PWM yang cukup banyak, yaitu 15 pin PWM yang bisa
digunakan. Gambar 2.3 berikut ini adalah gambar dari Arduino Mega 2560 yang
digunakan pada penelitian ini :
Gambar 2.3. Board Arduino Mega 2560 R3
Spesifikasi Arduino Mega 2560 ini dapat dilihat pada Tabel 2.1.
13
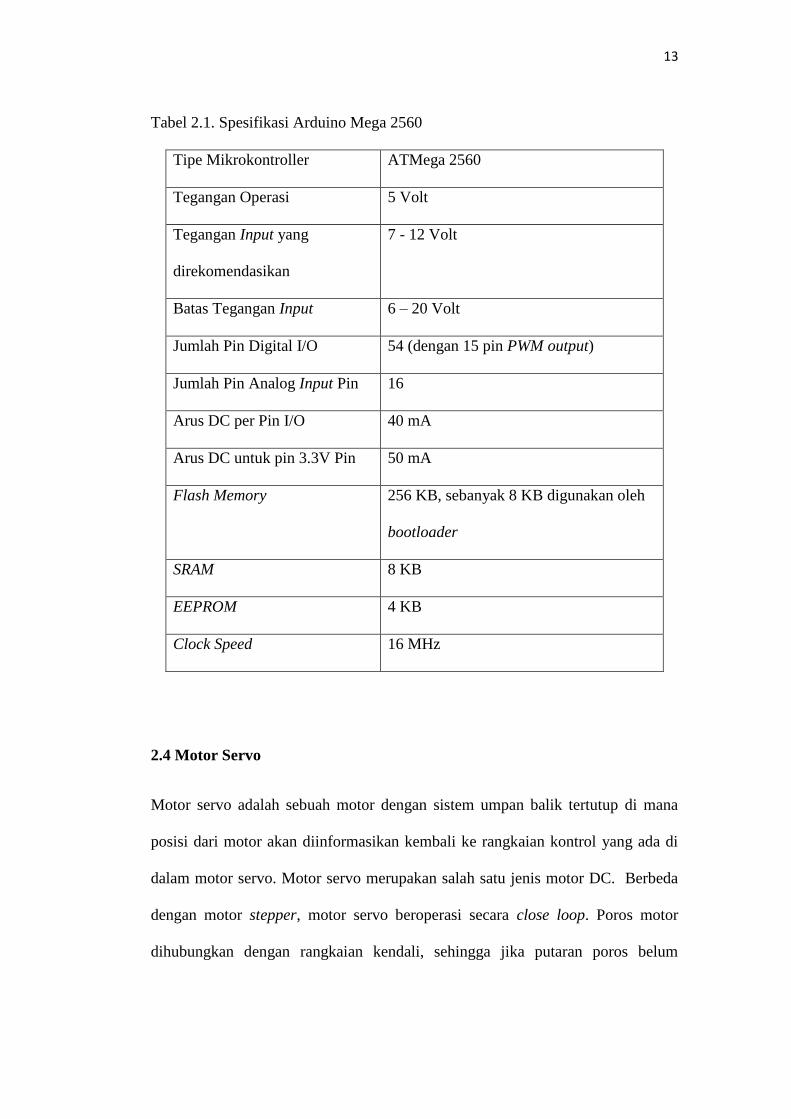
Tabel 2.1. Spesifikasi Arduino Mega 2560
Tipe Mikrokontroller ATMega 2560
Tegangan Operasi 5 Volt
Tegangan Input yang
direkomendasikan
7 - 12 Volt
Batas Tegangan Input 6 – 20 Volt
Jumlah Pin Digital I/O 54 (dengan 15 pin PWM output)
Jumlah Pin Analog Input Pin 16
Arus DC per Pin I/O 40 mA
Arus DC untuk pin 3.3V Pin 50 mA
Flash Memory 256 KB, sebanyak 8 KB digunakan oleh
bootloader
SRAM 8 KB
EEPROM 4 KB
Clock Speed 16 MHz
2.4 Motor Servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di mana
posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam motor servo. Motor servo merupakan salah satu jenis motor DC. Berbeda
dengan motor stepper, motor servo beroperasi secara close loop. Poros motor
dihubungkan dengan rangkaian kendali, sehingga jika putaran poros belum
14
sampai pada posisi yang diperintahkan maka rangkaian kendali akan terus
mengoreksi posisi hingga mencapai posisi yang diperintahkan.
Motor servo banyak digunakan pada peranti R/C (Remote Control) seperti mobil,
pesawat, helikopter, dan kapal, penggerak pada kamera serta sebagai aktuator
robot. Pada robot boat pengintai, motor servo digunakan sebagai pengendali
kamera pengintai (Ahlina, 2015).
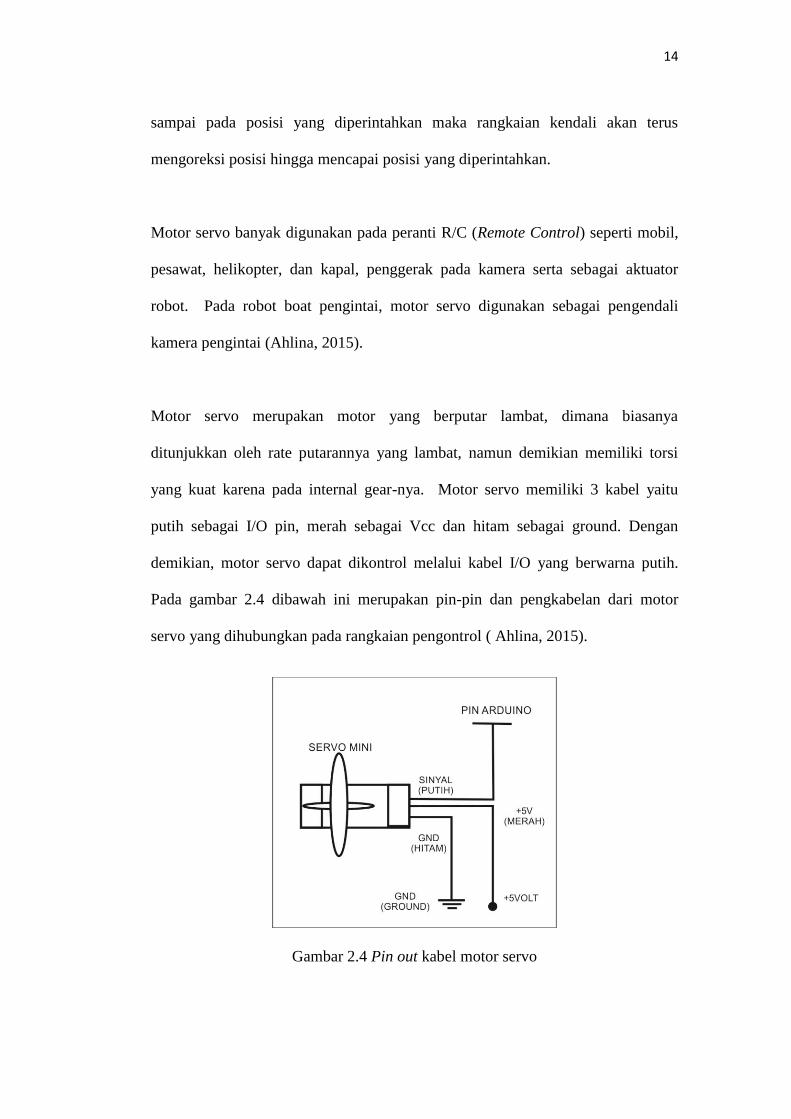
Motor servo merupakan motor yang berputar lambat, dimana biasanya
ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi
yang kuat karena pada internal gear-nya. Motor servo memiliki 3 kabel yaitu
putih sebagai I/O pin, merah sebagai Vcc dan hitam sebagai ground. Dengan
demikian, motor servo dapat dikontrol melalui kabel I/O yang berwarna putih.
Pada gambar 2.4 dibawah ini merupakan pin-pin dan pengkabelan dari motor
servo yang dihubungkan pada rangkaian pengontrol ( Ahlina, 2015).
Gambar 2.4 Pin out kabel motor servo
15
Didalam sebuah motor servo terdapat beberapa karakteristik, yaitu :
- 3 jalur : power, ground dan control.
- Sinyal kontrol mengendalikan posisi.
- Operasional dari motor servo dikendalikan oleh pulsa sebesar 20ms, dimana
lebar pulsa antara 500µs dan 2400µs menyatakan akhir dari range sudut
maksimum.
- Konstruksi didalamnya meliputi internal gear, potensiometer dan feedback
control.
Didalam motor servo terdapat potensiometer yang digunakan sebagai sensor
posisi. Potensiometer tersebut dihubungkan dengan output shaft untuk mengetahui
sudut posisi dari output gear pada motor servo. Ketika motor DC (Direct Current)
berputar, maka output shaft juga berputar dan sekaligus memutar potensiometer.
Rangkaian kontrol kemudian dapat membaca kondisi potensiometer tersebut
untuk mengetahui posisi actual shaft. Jika posisinya sesuai dengan yang
diinginkan, maka motor dc akan berhenti. Sudut operasi motor servo (operating
angle ) bervariasi tergantung jenis motor servo (Ahlina, 2015).
Pada gambar 2.5 merupakan internal gear dan kontrol elektronik untuk mengatur
pergerakan dari motor.
16
Gambar 2.5 Kontruksi Motor Servo
2.4.1 Jenis-jenis Motor Servo
Motor servo terbagi menjadi 2 jenis, yaitu :
a. Motor servo standar
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan
defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari
kanan – tengah – kiri adalah 180°. Pengaturan motor servo diperlukan untuk
mengetahui gerakan dari motor servo dan pula yang harus kita berikan untuk
bergerak ke kanan atau bergerak ke kiri. Teknik PWM (Pulse Width
Modulation) digunakan untuk mengatur sudut motor servo jenis standard 180˚.
Sudut dari motor servo diatur berdasarkan lebar pulsa yang dikirim melalui
kaki sinyal dari kabel motor. Sebagai contoh, dengan pulsa 50µs pada periode
delay selebar 20ms maka sudut dari motor servo akan berada pada posisi
netral atau 90˚ sedangkan pada saat pulsa ≤ 20µs pada periode delay selebar
20ms maka sudut dari motor servo akan berada pada posisi 0˚ dan untuk pulsa
17
100µs pada periode delay sebesar 20ms maka sudut dari motor servo akan
berada pada posisi 180˚.
Pada motor servo standar 180˚ semakin lebar pulsa off maka akan semakin
besar gerakan sumbu kearah jarum jam dan semakin kecil pulsa off maka akan
semakin besar gerakan sumbu berlawanan dengan arah jarum jam sehingga
semakin besar pulsa yang masuk melalui kaki pin motor sevo maka semakin
besar sudut yang dihasilkan.
b. Motor Servo Continuous
Motor servo kontinu merupakan motor servo yang bagian feedback-nya
dilepas sehingga motor servo jenis ini mampu bergerak dua arah (CW dan
CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Prinsip kerja dari motor servo continuous sedikit berbeda dari motor servo
standar. Untuk menggerakan motor servo ke kanan atau ke kiri, tergantung
dari nilai delay yang diberikan. Untuk membuat servo pada posisi center,
berikan pulsa 1.5ms dan untuk pemberian pulsa ≤ 1.3ms motor servo akan
berputar searah jarum jam dengan besar putaran sumbu ditentukan oleh besar
pulsa on pada motor sedangkan untuk membuat motor servo continuous
berputar berlawanan dengan arah jarum jam dapat memberikan pulsa ≥ 1.7ms,
dan dengan besar pulsa on yang digunakan, dapat menentukan besar putaran
untuk berlawanan dengan arah jarum jam.

18
Pada motor servo continuous mampu bergerak dua arah yaitu searah jarum
jam dan berlawanan dengan arah jarum jam tanpa adanya batasan defleksi
sudut putar (dapat berputar secara kontinyu sehingga motor ini berputar 360˚)
(Ahlina, 2015).
19
III. METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Penelitian tugas akhir ini dilaksanakan pada bulan Maret hingga Agustus 2017.
Perancangan sistem dan laporan dilakukan di Laboratorium Terpadu Teknik
Elektro Universitas Lampung.
3.2. Alat dan Bahan
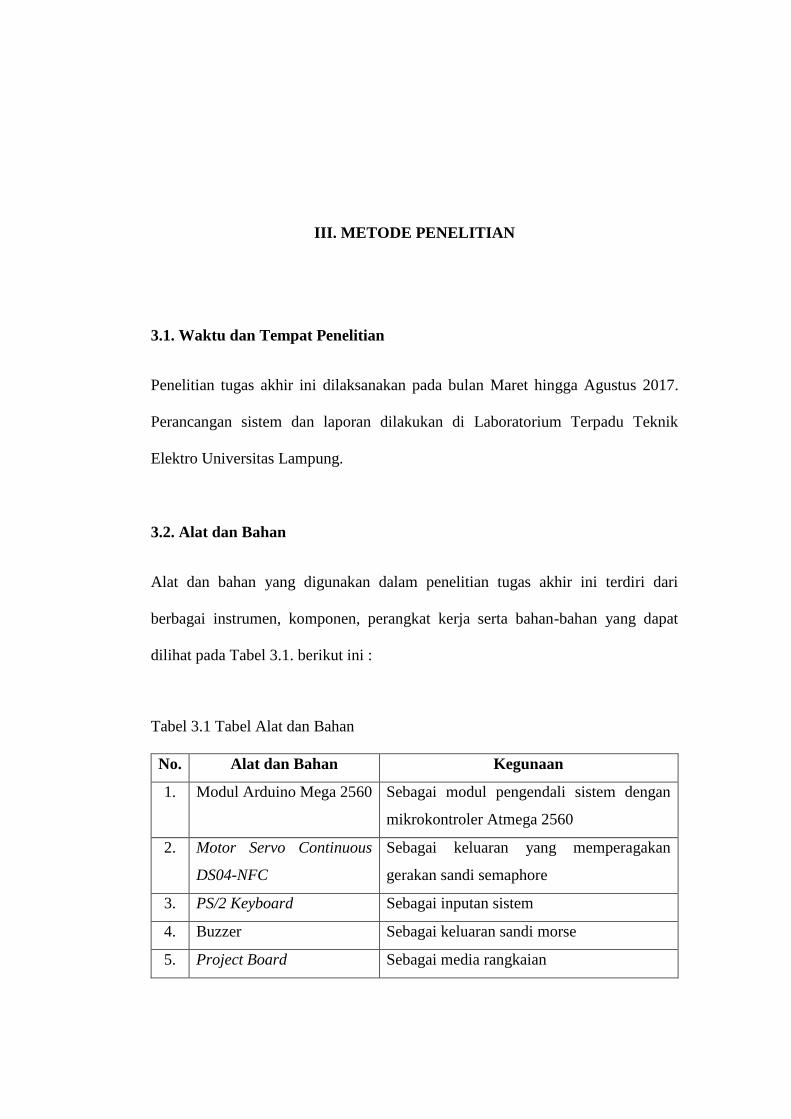
Alat dan bahan yang digunakan dalam penelitian tugas akhir ini terdiri dari
berbagai instrumen, komponen, perangkat kerja serta bahan-bahan yang dapat
dilihat pada Tabel 3.1. berikut ini :
Tabel 3.1 Tabel Alat dan Bahan
No. Alat dan Bahan Kegunaan
1. Modul Arduino Mega 2560 Sebagai modul pengendali sistem dengan
mikrokontroler Atmega 2560
2. Motor Servo Continuous
DS04-NFC
Sebagai keluaran yang memperagakan
gerakan sandi semaphore
3. PS/2 Keyboard Sebagai inputan sistem
4. Buzzer Sebagai keluaran sandi morse
5. Project Board Sebagai media rangkaian
20
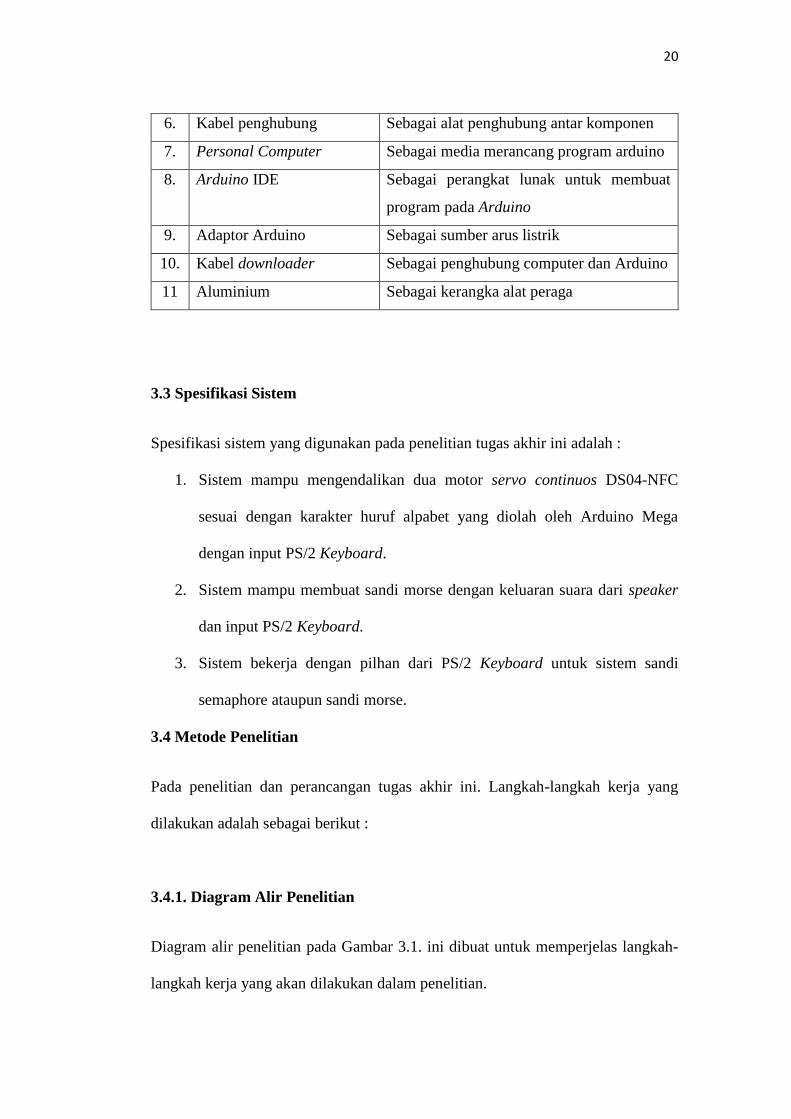
6. Kabel penghubung Sebagai alat penghubung antar komponen
7. Personal Computer Sebagai media merancang program arduino
8. Arduino IDE Sebagai perangkat lunak untuk membuat
program pada Arduino
9. Adaptor Arduino Sebagai sumber arus listrik
10. Kabel downloader Sebagai penghubung computer dan Arduino
11 Aluminium Sebagai kerangka alat peraga
3.3 Spesifikasi Sistem
Spesifikasi sistem yang digunakan pada penelitian tugas akhir ini adalah :
1. Sistem mampu mengendalikan dua motor servo continuos DS04-NFC
sesuai dengan karakter huruf alpabet yang diolah oleh Arduino Mega
dengan input PS/2 Keyboard.
2. Sistem mampu membuat sandi morse dengan keluaran suara dari speaker
dan input PS/2 Keyboard.
3. Sistem bekerja dengan pilhan dari PS/2 Keyboard untuk sistem sandi
semaphore ataupun sandi morse.
3.4 Metode Penelitian
Pada penelitian dan perancangan tugas akhir ini. Langkah-langkah kerja yang
dilakukan adalah sebagai berikut :
3.4.1. Diagram Alir Penelitian
Diagram alir penelitian pada Gambar 3.1. ini dibuat untuk memperjelas langkah-
langkah kerja yang akan dilakukan dalam penelitian.
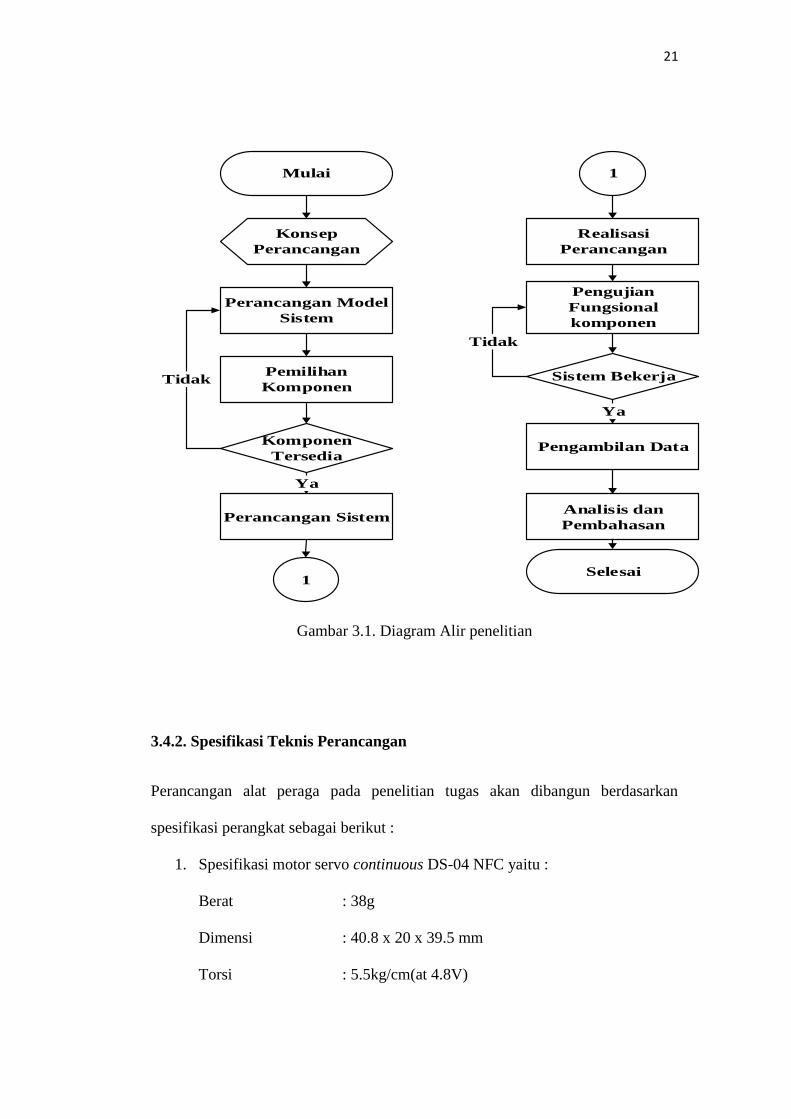
21
Gambar 3.1. Diagram Alir penelitian
3.4.2. Spesifikasi Teknis Perancangan
Perancangan alat peraga pada penelitian tugas akan dibangun berdasarkan
spesifikasi perangkat sebagai berikut :
1. Spesifikasi motor servo continuous DS-04 NFC yaitu :
Berat : 38g
Dimensi : 40.8 x 20 x 39.5 mm
Torsi : 5.5kg/cm(at 4.8V)
Mulai
Konsep
Perancangan
Perancangan Model
Sistem
Pemilihan
Komponen
Komponen
Tersedia
Ya
Perancangan Sistem
Tidak
1
Realisasi
Perancangan
Pengujian
Fungsional
komponen
Sistem Bekerja
Ya
Pengambilan Data
Analisis dan
Pembahasan
Selesai
Tidak
1
22
Rpm : 0.22sec/60°(at 4.8V)
range tegangan motor : 4.8v-6
2. Spesifikasi buzzer aktif, yaitu:
Arus : < 35 mA
Suara : 85 dB/10 cm
Frekuensi : 2300 Hz ± 500 Hz
Suhu : -20° – 70° C
3.4.3. Perancangan Model Alat Peraga
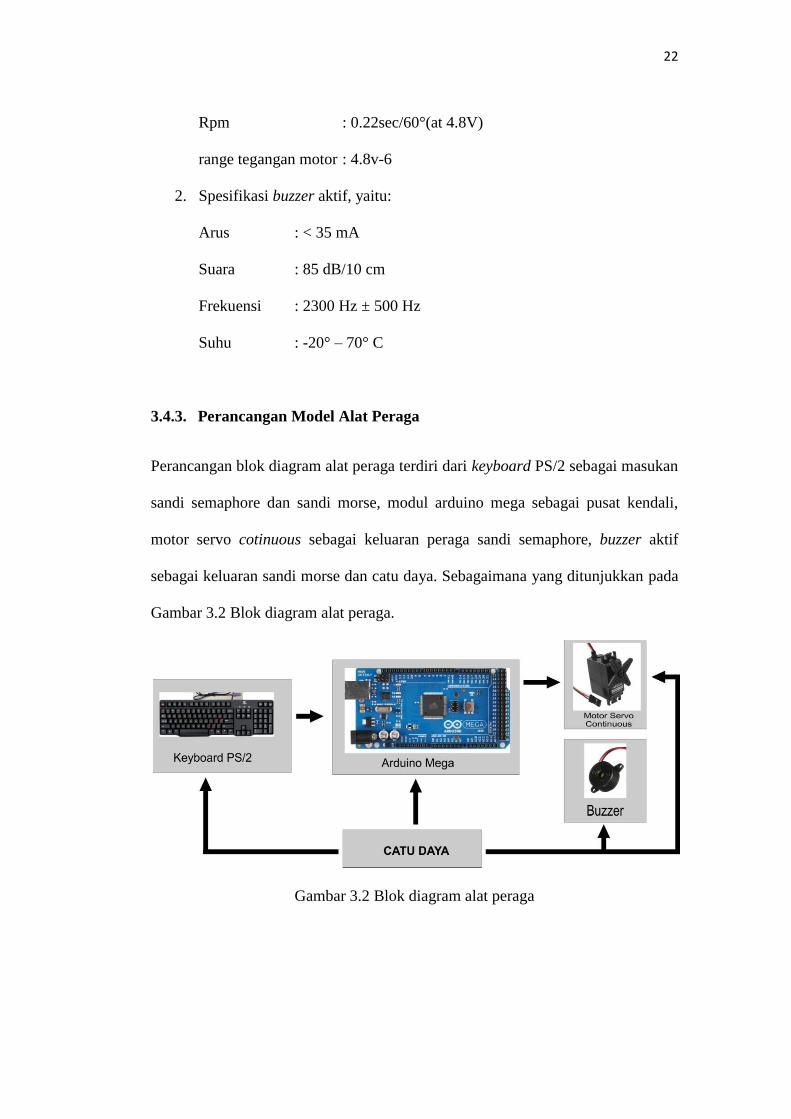
Perancangan blok diagram alat peraga terdiri dari keyboard PS/2 sebagai masukan
sandi semaphore dan sandi morse, modul arduino mega sebagai pusat kendali,
motor servo cotinuous sebagai keluaran peraga sandi semaphore, buzzer aktif
sebagai keluaran sandi morse dan catu daya. Sebagaimana yang ditunjukkan pada
Gambar 3.2 Blok diagram alat peraga.
Gambar 3.2 Blok diagram alat peraga
23
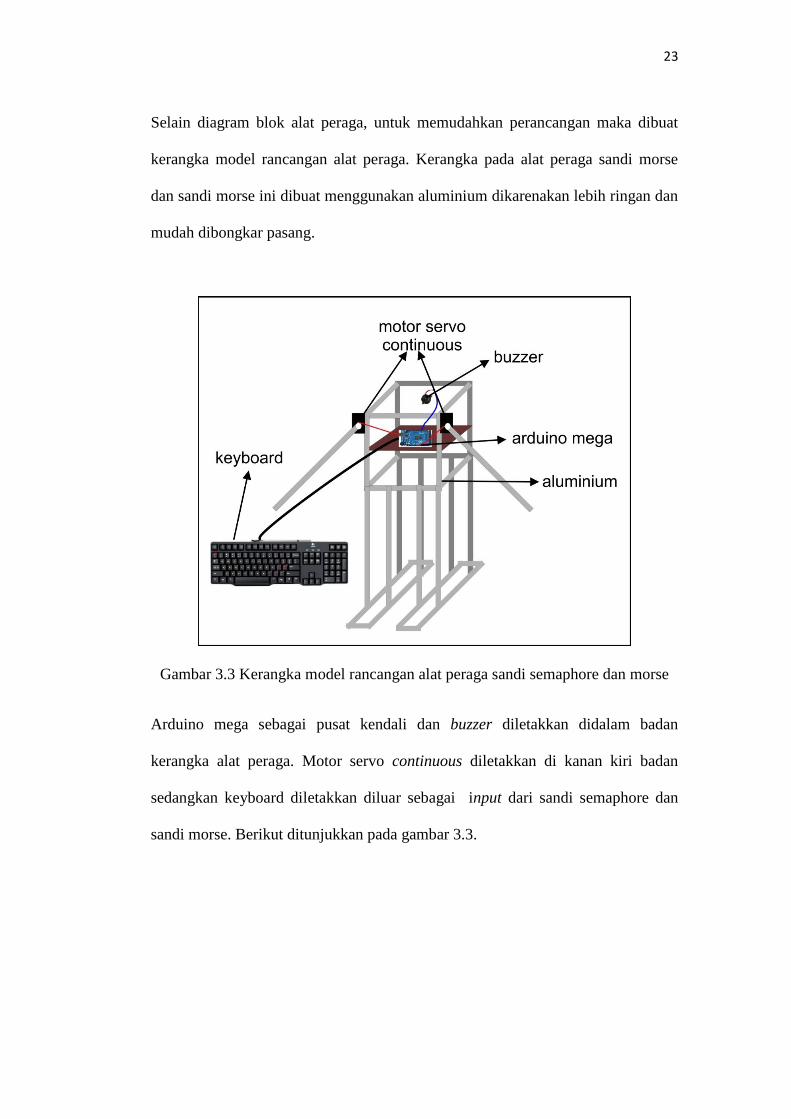
Selain diagram blok alat peraga, untuk memudahkan perancangan maka dibuat
kerangka model rancangan alat peraga. Kerangka pada alat peraga sandi morse
dan sandi morse ini dibuat menggunakan aluminium dikarenakan lebih ringan dan
mudah dibongkar pasang.
Gambar 3.3 Kerangka model rancangan alat peraga sandi semaphore dan morse
Arduino mega sebagai pusat kendali dan buzzer diletakkan didalam badan
kerangka alat peraga. Motor servo continuous diletakkan di kanan kiri badan
sedangkan keyboard diletakkan diluar sebagai input dari sandi semaphore dan
sandi morse. Berikut ditunjukkan pada gambar 3.3.
24
3.4.4. Analisa dan Kesimpulan
Analisa dilakukan dengan cara membandingkan hasil pengujian sistem ini baik
perbagian maupun secara keseluruhan dengan nilai yang diharapkan dari literatur
yang ada.
Adapun analisa yang akan dilakukan pada penelitian ini adalah sebagai berikut.
1. Pengaruh arus dan tegangan pada setiap gerakan motor servo continuous.
2. Waktu yang diperlukan pada setiap huruf sandi semaphore dan delay pada
motor servo continuous.
3. Waktu yang diperlukan pada setiap huruf sandi morse.
3.4.5. Pembuatan Laporan
Akhir dari tahap penelitian ini adalah pembuatan laporan dari semua kegiatan
penelitian yang telah dilakukan.
47
V. KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari analisa dan pembahasan pada bab sebelumnya, dapat disimpulkan bahwa:
1. Rancang Bangun Alat peraga sandi semaphore dan sandi morse terealisasi
sesuai dengan yang diharapkan.
2. Karena pertimbangan mekanis, sistem perlu dikalibrasi setiap 5 kali
peragaan huruf sandi semaphore.
3. Rata-rata standar deviasi waktu pada peragaan huruf sandi morse adalah
0,079 detik sedangkan rata-rata standar deviasi sudut pada peragaan huruf
sandi semaphore pada motor kanan adalah 7,89 derajat dan pada motor kiri
adalah 8,04 derajat.
4. Waktu rata-rata peragaan huruf yang diperlukan pada sandi morse adalah
0,67 detik.
5. Waktu rata-rata peragaan huruf yang diperlukan pada sandi semaphore
adalah 3,63 detik.
48
5.2 Saran
1. Perlu adanya LCD agar lebih menarik siswa untuk mempelajarinya dan
untuk mengetahui huruf yang sudah terinput oleh operator.
2. Jika menginginkan sudut yang lebih presisi maka diperlukan pengendali
pada motor servo continuous DS-04 NFC.
DAFTAR PUSTAKA
Ahlina, Nuril. 2015. Sistem Kendali Motor Servo Sebagai Penggerak Kamera
Pada Robot Boat Pengintai Menggunakan XBEE Series 1 Berbasis
Arduio. Laporan Akhir Jurusan Teknik Elektro. Politeknik Negeri
Sriwijaya.
Artanto, Dian., 2012. Pengenalan Arduino dan LabVIEW. Gramedia. Jakarta.
Bob Sunardi, Andri. 2013. Boyman Ragam Latih Pramuka, Buku Panduan.
Darma Utama. Surabaya.
Malvino, Gunawan, Hanapi. 1995. Prinsip-prinsip Elektronik. Erlangga. Jakarta.
Mardiansyah, 2014. Rancang Bangun Robot Semaphore Dengan Input Sandi
Morse untuk Pembelajaran Siswa Pramuka. Tugas Akhir Jurusan
Teknik Elektronika. Politeknik Elektronika Negeri Surabaya.
Ratna Sulistiyanti, S, Arinto Setyawan, FX, 2006. Dasar Sistem Kendali.
Universitas Lampung. Lampung.
Republik Indonesia. 2010. Undang-Undang No. 12 Tahun 2012 tentang Gerakan
Pramuka. Jakarta.
Rusli Sabri, 2011. Running Text Menggunakan Keyboard AT PS/2 Berbasis
Mikrokontroller ATMega 8535. Skripsi Jurusan Teknik Elektro.
Universitas Islam Negeri Sultan Syarif Kasim.
Sujarwata., 2013. Pengendali Motor Servo Berbasis Mikrokontroler Basic Stamp
2SX Untuk Pengembangan Sistem Robotika, Jurnal Fisika Volume V
No.1. Jurusan Fisika. Universitas Negeri Semarang.

Sumiarta, Kadek Adi dkk. 2013. Makalah Piranti Masukan dan Keluaran
Keyboard. Halaman 4-11. Manajemen Informatika. Universitas
Pendidikan Ganesha.