presentasi riset (1) konstruksi formalisasi klasi–kasi ... fileberikut ini adalah sifat-sifat yang...
TRANSCRIPT
Presentasi Riset (1)
Konstruksi Formalisasi Klasifikasi Kendaraan Otomatis
(AVC/ Automatic Vehicle Classification)
dengan Menggunakan Kalkulus Durasi
Oleh: Muhammad Arzaki
Laboratorium FMSEFakultas Ilmu KomputerUniversitas Indonesia
April 2011

Pokok Bahasan
1 Ulasan Sistem Waktu Nyata (SWN)
2 Formalisasi SWN
1 Variabel status2 Sifat-sifat pada SWN
3 Pengantar Kalkulus Durasi
1 Himpunan simbol pada kalkulus durasi2 Sintaksis kalkulus durasi3 Semantik kalkulus durasi
4 Langkah-Langkah Formalisasi SWN dengan MenggunakanKalkulus Durasi
5 Contoh Formalisasi SWN dengan Menggunakan KalkukusDurasi
6 Translasi dari LTL ke Kalkulus Durasi pada AVC.
7 Rencana selanjutnya

Ulasan SWN
1 Sistem waktu nyata (real-time system): sistem komputasiyang berkaitan dengan sistem tertanam (embedded system)dan sistem reaktif (reactive system).
2 Sistem tertanam: sistem komputasi bertujuan khusus yangseluruh sistemnya dimasukkan ke dalam alat yang dikontrololeh sistem komputasi tersebut.
3 Sistem reaktif: sistem komputasi yang berinteraksi denganlingkungan fisik atau suatu alat secara terus menerus(kontinu).
4 Sistem waktu nyata: sistem reaktif yang melakukan komputasiterhadap masukan dan menghasilkan keluaran tertentu dalambatas waktu yang telah ditentukan.

Diagram SWN
Berikut ini diagram yang dapat menjelaskan cara kerja suatusistem waktu nyata menurut Olderog dan Dierks.
Gambar 1: Diagram sistem waktu nyata.
Penjelasan Diagram SWN
Dari diagram sebelumnya, dapat diketahui bahwa sistem waktunyata terdiri atas:
1 Alat (plant), merupakan suatu peralatan fisis dari suatusistem waktu nyata.
2 Sensor, menerima masukan dari alat dan mengirimnya kepengontrol (controller).
3 Aktuator, menerima perintah dari pengontrol danmengirimnya ke alat.
4 Pengontrol, bertugas untuk menentukan hal-hal yang harusdilakukan oleh alat.

Formalisasi SWN IVariabel status
1 Tujuan formalisasi sistem waktu nyata:
1 mereduksi ambiguitas deskripsi sistem waktu nyata yangdijelaskan dengan menggunakan bahasa alami (bahasapercakapan sehari-hari).
2 mempermudah verifikasi yang dilakukan terhadap sistem waktunyata tersebut.
2 Hingga saat ini, terdapat tiga pendekatan formal untukformalisasi dan verifikasi sistem reaktif, yaitu:
1 kalkulus durasi (duration calculus)2 automata berjangka waktu (timed automata)3 automata PLC (Programmable Logic Controller).

Formalisasi SWN IIVariabel status
3 Formalisasi dengan menggunakan kalkulus durasimenggunakan formula logika interval temporal, sedangkanformalisasi dengan menggunakan automata berjangka waktudan automata PLC menggunakan diagram automata.
4 Untuk mendeskripsikan sistem waktu nyata secara formaldengan menggunakan kalkulus durasi, perlu pendefinisianhimpunan variabel status (state variable/ observable).
5 Variabel status: suatu variabel yang berupa fungsi darihimpunan Time (yang menyatakan waktu) ke himpunan{0, 1}.
6 Himpunan Time dapat berupa Z≥0 atau R≥0. Himpunanseluruh variabel status dinyatakan dengan SVar .
Formalisasi SWN IIIVariabel status
7 Jika S ∈ SVar , maka
S : Time→{0, 1}: t 7→ S (t) .
8 Contoh: misalkan S merupakan variabel status yangmendiskripsikan kerja suatu sensor, maka S dapatdidefinisikan sebagai
S (t) =
1,
jika sensor mendeteksisesuatu pada waktu t
0,jika sensor tidak mendeteksisesuatu pada waktu t.

Formalisasi SWN ISifat-sifat pada SWN
Berikut ini adalah sifat-sifat yang harus dimiliki oleh suatu sistemwaktu nyata menurut Olderog dan Dierks.
1 Sifat keamanan (safety properties)
1 Sistem waktu nyata memenuhi kriteria bahwa sesuatu yangburuk dan tidak diinginkan tidak boleh pernah terjadi padasistem tersebut.
2 Contoh: misalkan C merupakan suatu variabel status yangmenyatakan bahwa suatu sistem dalam kondisi kritis (yangtidak boleh terjadi). Fungsi C : Time→ {0, 1} didefinisikansebagai berikut
C (t) :=
1,
apabila sistem dalamkondisi kritis pada waktu t
0,apabila sistem tidak dalamkondisi kritis pada waktu t
. (4.1)
Formalisasi SWN IISifat-sifat pada SWN
Berdasarkan formulasi 4.1 maka dapat disimpulkan bahwasuatu sistem waktu nyata harus memenuhi kondisi
∀t ∈ Time.¬C (t) .2 Sifat ketersediaan (liveness properties)
1 Sistem waktu nyata memenuhi kriteria bahwa sesuatu yangbaik dan diinginkan suatu saat harus terjadi pada sistemtersebut.
2 Contoh: misalkan G merupakan suatu variabel status yangmenyatakan bahwa suatu sistem berada dalam kondisi yangbaik dan diinginkan untuk terjadi. Fungsi G : Time→ {0, 1}didefinisikan sebagai berikut
G (t) :=
1,
apabila sistem dalamkondisi baik yang diinginkan
pada waktu t
0,apabila sistem tidak dalamkondisi baik yang diinginkan
pada waktu t
. (4.2)

Formalisasi SWN IIISifat-sifat pada SWN
Berdasarkan formulasi 4.2 maka dapat disimpulkan bahwasuatu sistem waktu nyata harus memenuhi kondisi
∃t ∈ Time.G (t) .
3 Sifat respon terbatas (bounded response properties)Sistem waktu nyata memenuhi kriteria bahwa reaksi yangdiberikan oleh sistem waktu nyata terjadi pada interval [b, e]dengan b, e ∈ Time dan b ≤ e.
4 Sifat durasi (duration properties)
1 Sistem waktu nyata memenuhi kriteria bahwa untuk setiapinterval pengamatan [b, e] yang memenuhi kondisi A (b, e)(suatu kondisi yang dapat berupa formula pada interval [b, e]yang memiliki nilai kebenaran benar atau salah) makaakumulasi waktu di mana sistem dalam kondisi tertentumemiliki batas atas u (b, e).

Formalisasi SWN IVSifat-sifat pada SWN
2 Untuk mengukur akumulasi waktu dari suatu variabel statusS (t) pada interval [b, e] digunakan operator integral(Riemann) dengan batas bawah integrasi b dan batas atasintegrasi e, yaitu
e∫b
S (t) dt.
Catatan penting:
pada kalkulus durasi S (t) merupakan fungsi yang memilikisifat nilainya bervariasi secara berhingga (finite variability).
Dengan kalimat lain S (t) merupakan fungsi dari Time ke{0, 1} yang kontinu kecuali pada berhingga titik.

Formalisasi SWN VSifat-sifat pada SWN
Dengan syarat ini maka untuk sebarang interval [b, e] ∈ Intvterdapat suatu partisi berhingga pada [b, e], yaitu
[b, t1] , [t1, t2] , . . . , [tn, e]
untuk suatu n ∈ Z≥0 sehingga nilai dari S (t) konstan padasetiap subinterval dari partisi tersebut.
Hal ini untuk menjamin bahwa S (t) merupakan fungsi yangterintegral Riemann (Riemann integrable) pada [b, e].

Himpunan simbol pada kalkulus durasi I
Formula pada kalkulus durasi dibentuk oleh himpunan-himpunansimbol berikut ini.
1 GVar : himpunan yang terhitung dan tak terhingga darivariabel global x1, x2, x3, . . .. yang tidak bergantung terhadapinterval waktu.
2 TVar : himpunan yang yang terhitung dan tak terhingga darivariabel v1, v2, v3, . . .. TVar terdiri atas variabel interval l(yang merupakan fungsi yang memetakan suatu interval kepanjangnya) dan durasi status (yang dinotasikan dengan
∫S
untuk suatu S ∈ SVar).

Himpunan simbol pada kalkulus durasi II
3 FSymb: himpunan yang terhitung dan tak terhingga darisimbol-simbol fungsi global
f m11 , f m22 , f m33 , . . . .
Nilai dari mi untuk i ∈ Z≥0 merupakan ariti dari fi(banyaknya argumen dari fungsi f ). Apabila mi bernilai 0maka f 0i merupakan suatu konstanta (suatu unsur di R).Setiap f mii ∈ FSymb memiliki daerah asal (Term)
mi dandaerah hasil R. (Term)mi didefinisikan sebagai
(Term)mi = Term× . . .× Term︸ ︷︷ ︸sebanyak mi
.

Himpunan simbol pada kalkulus durasi III
4 RSymb: himpunan yang terhitung dan tak terhingga darisimbol-simbol relasi global
Fm11 ,Fm22 ,Fm33 , . . . .
Nilai dari mi untuk i ∈ Z≥0 merupakan ariti dari fi . Apabilami bernilai 0 maka F 0i merupakan suatu proposisi konstanyang memiliki nilai kebenaran T (benar) atau F (salah)namun tidak keduanya. Setiap Fmii ∈ RSymb memiliki daerahasal (Term)mi dan daerah hasil {F,T}.
Sintaksis kalkulus durasi I
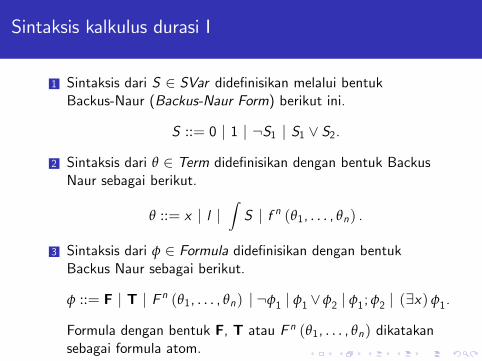
1 Sintaksis dari S ∈ SVar didefinisikan melalui bentukBackus-Naur (Backus-Naur Form) berikut ini.
S ::= 0 | 1 | ¬S1 | S1 ∨ S2.
2 Sintaksis dari θ ∈ Term didefinisikan dengan bentuk BackusNaur sebagai berikut.
θ ::= x | l |∫S | f n (θ1, . . . , θn) .
3 Sintaksis dari φ ∈ Formula didefinisikan dengan bentukBackus Naur sebagai berikut.
φ ::= F | T | F n (θ1, . . . , θn) | ¬φ1 | φ1 ∨φ2 | φ1; φ2 | (∃x) φ1.
Formula dengan bentuk F, T atau F n (θ1, . . . , θn) dikatakansebagai formula atom.
Sintaksis kalkulus durasi II
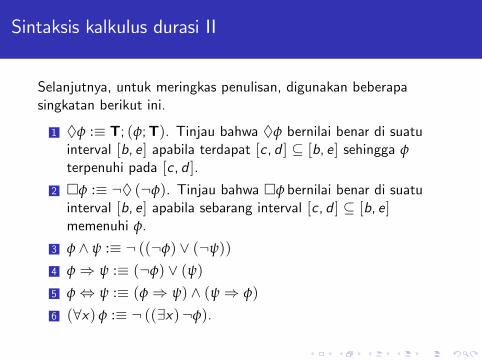
Selanjutnya, untuk meringkas penulisan, digunakan beberapasingkatan berikut ini.
1 ♦φ :≡ T; (φ;T). Tinjau bahwa ♦φ bernilai benar di suatuinterval [b, e] apabila terdapat [c, d ] ⊆ [b, e] sehingga φterpenuhi pada [c , d ].
2 �φ :≡ ¬♦ (¬φ). Tinjau bahwa �φ bernilai benar di suatuinterval [b, e] apabila sebarang interval [c , d ] ⊆ [b, e]memenuhi φ.
3 φ ∧ ψ :≡ ¬ ((¬φ) ∨ (¬ψ))
4 φ⇒ ψ :≡ (¬φ) ∨ (ψ)5 φ⇔ ψ :≡ (φ⇒ ψ) ∧ (ψ⇒ φ)
6 (∀x) φ :≡ ¬ ((∃x)¬φ).
Semantik kalkulus durasi I
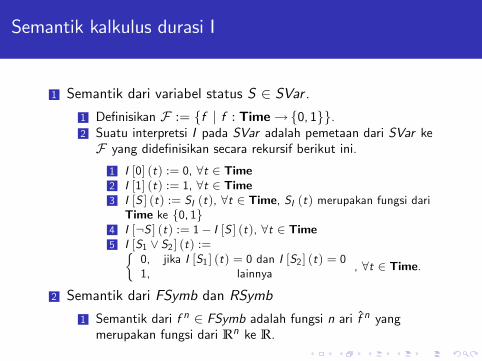
1 Semantik dari variabel status S ∈ SVar .1 Definisikan F := {f | f : Time→{0, 1}}.2 Suatu interpretsi I pada SVar adalah pemetaan dari SVar keF yang didefinisikan secara rekursif berikut ini.1 I [0] (t) := 0, ∀t ∈ Time2 I [1] (t) := 1, ∀t ∈ Time3 I [S ] (t) := SI (t), ∀t ∈ Time, SI (t) merupakan fungsi dariTime ke {0, 1}
4 I [¬S ] (t) := 1− I [S ] (t), ∀t ∈ Time5 I [S1 ∨ S2 ] (t) :={
0, jika I [S1 ] (t) = 0 dan I [S2 ] (t) = 01, lainnya
, ∀t ∈ Time.
2 Semantik dari FSymb dan RSymb
1 Semantik dari f n ∈ FSymb adalah fungsi n ari f̂ n yangmerupakan fungsi dari Rn ke R.

Semantik kalkulus durasi II
2 Semantik dari F n ∈ RSymb adalah fungsi n ari F̂ n yangmerupakan fungsi dari Rn ke {F,T}.
3 Semantik dari term θ ∈ Term.Semantik dari term θ dengan pemberian nilai V ∈ Val padainterval [b, e] terhadap interpretasi I dinotasikan denganI [θ] (V , [b, e]) didefinisikan secara rekursif berikut ini.
1 Untuk θ = x ∈ GVar , maka I [x ] (V , [b, e]) := V (x), denganV ∈ Val = {f | f : GVar → R}.
2 Untuk θ = l ∈ TVar , makaI [l ] (V , [b, e]) := I[b,e ] (l) = e − b.
3 Untuk θ =∫S ∈ TVar , maka
I [∫S ] (V , [b, e]) := I[b,e ] [
∫S ] =
e∫bSI (t) dt.

Semantik kalkulus durasi III
4 Untuk θ = f n (θ1, θ2, . . . , θn), maka
I [f n (θ1, θ2, . . . , θn)] (V , [b, e]) := f̂ n (c1, c2, . . . , cn) ,
dengan ci = I [θi ] (V , [b, e]) ∀i ∈ {1, . . . , n}.
Semantik dari suatu term θ ∈ Term dengan pemberian nilaitertentu pada suatu interval terhadap suatu interpretasitertentu merupakan suatu bilangan real.
4 Semantik dari φ ∈ FormulaSemantik dari formula φ dengan pemberian nilai V ∈ Valpada interval [b, e] terhadap interpretasi I dinotasikan denganI [φ] (V , [b, e]) didefinisikan secara rekursif berikut ini.
1 Untuk φ = F n (θ1, θ2, . . . , θn), maka
I [F n (θ1, θ2, . . . , θn)] (V , [b, e]) := F̂ n (c1, c2, . . . , cn) ,
dengan ci = I [θi ] (V , [b.e]) ∀i ∈ {1, . . . , n}.

Semantik kalkulus durasi IV
2 Untuk φ ≡ ¬φ1, maka I [¬φ1 ] (V , [b, e]) = T jikka (jika danhanya jika) I [φ1 ] (V , [b, e]) = F.
3 Untuk φ ≡ φ1 ∨ φ2, maka I [φ1 ∨ φ2 ] (V , [b, e]) := T jikkaI [φ1 ] (V , [b, e]) = T atau I [φ2 ] (V , [b, e]) = T.
4 Untuk φ ≡ φ1; φ2, maka I [φ1; φ2 ] (V , [b, e]) = T jikkaterdapat c ∈ [b, e] sehingga I [φ1 ] (V , [b, c ]) = T danI [φ2 ] (V , [c , e]) = T.
5 Untuk φ ≡ (∃x) φ1, maka I [(∃x) φ1 ] (V , [b, e]) = T jikkaterdapat d ∈ R sehingga I [φ1 ] (V [x := d ] , [b, e]) = T.V [x := d ] ∈ Val merupakan notasi untuk fungsi yangx-ekivalen dengan V ∈ Val , dengan kalimat lain untuk setiapy ∈ GVar maka V [x := d ] didefinisikan sebagai berikut.
V [x := d ] (y) ={V (y) , jika x 6= yd , jika x = d
.
Semantik kalkulus durasi V
Semantik dari suatu term φ ∈ Formula dengan pemberiannilai tertentu pada suatu interval terhadap suatu interpretasitertentu merupakan suatu nilai kebenaran F atau T.
Beberapa Konvensi untuk Mempersingkat PenulisanFormula I
Berikut ini beberapa konvensi dalam penulisan yang digunakanuntuk mempersingkat formula dalam kalkulus durasi. Konvensi inidisarikan dari definisi yang diberikan oleh Olderog dan Dierks.
1 Notasi yang menyatakan interval titik.de :≡ l = 0.
2 Notasi yang menyatakan suatu S ∈ SVar berlaku hampir disemua titik pada interval pengamatan.dSe:≡
(∫S = l
)∧ (l > 0).
3 Notasi yang menyatakan suatu S ∈ SVar berlaku selamawaktu τ pada interval pengamatan.dSeτ :≡ dSe ∧ (l = τ).
4 Notasi yang menyatakan suatu S ∈ SVar berlaku tidak lebihlama dari waktu τ pada interval.dSe≤τ:≡ dSe ∧ (l ≤ τ).
Beberapa Konvensi untuk Mempersingkat PenulisanFormula II
5 Notasi yang menyatakan S ∈ SVar berlaku tidak kurang dariwaktu τ pada interval.dSe≥τ:≡ dSe ∧ (l ≥ τ).

Langkah-Langkah Formalisasi SWN dengan menggunakanKalkulus Durasi I
Secara umum, terdapat dua jenis metode formalisasi SWN denganmenggunakan kalkulus durasi, yaitu:
1 Formalisasi SWN dengan menentukan variabel status dancakupan pengamatan yang diinginkan. Hal ini merupakanlangkah formalisasi dari dengan cara membangun dari awal(penyusunan formula logika interval temporal dilakukan dariawal).
1 Keuntungan: formula logika dapat disesuaikan denganspesifikasi formalisasi yang diinginkan, sehingga metodepembuktian dalam verifikasi dapat dilakukan dengan lebihterarah.
2 Kelemahan: dapat membutuhkan waktu yang cukup lamadalam penyusunan formula logika.
Langkah-Langkah Formalisasi SWN dengan menggunakanKalkulus Durasi II
2 Formalisasi SWN dengan melakukan translasi dari formulalogika lain, yaitu logika predikat atau logika temporal linier(LTL).
1 Keuntungan: dapat mempersingkat waktu yang dibutuhkandalam penyusunan formula logika.
2 Kelemahan: metode pembuktian dalam verifikasi dapat lebihsulit karena belum tentu sesuai dengan spesifikasi formalisasipada kalkulus durasi.

Langkah-langkah formalisasi dengan menentukan variabelstatus dan cakupan pengamatan yang diinginkan I
Berikut ini merupakan langkah-langkah formalisasi yang dijelaskanoleh Olderog dan Dierks (formalisasi dengan cara membangun dariawal).
1 Pertama, tentukan himpunan variabel status SVar yang akandiamati dalam suatu SWN. Hal ini bergantung terhadaptingkat kerincian formalisasi yang dilakukan.
2 Selanjutnya tentukan interpretasi untuk setiap S ∈ SVar danlakukan konstruksi formula logika yang konjungsinya akandiambil sebagai spesifikasi dari sistem (dinyatakan denganSpec).
Langkah-langkah formalisasi dengan menentukan variabelstatus dan cakupan pengamatan yang diinginkan II
3 Apabila terdapat formula yang berkaitan dengan pengontrolpada SWN, maka formula yang merepresentasikan kinerjapengontrol dinotasikan dengan Ctrl. Ctrl dan Specmemenuhi hubungan
Ctrl⇒ Spec. (6.1)
Formula 6.1 harus merupakan formula yang absah/ valid(benar untuk semua interpretasi dan semua valuasi padasetiap interval waktu).
Langkah-langkah formalisasi dengan menentukan variabelstatus dan cakupan pengamatan yang diinginkan III
4 Apabila formulasi kinerja pengontrol menggunakan variabelstatus yang berbeda atau apabila formulasi kinerja pengontroldipengaruhi oleh suatu asumsi, maka formula 6.1 dapatdituliskan sebagai
Ctrl∧Asm⇒ Spec. (6.2)
Formula 6.2 harus merupakan formula yang absah.
Contoh Formalisasi SWN dengan Menggunakan KalkulusDurasi I
Berikut ini merupakan contoh formalisasi suatu perlintasan keretaapi satu jalur yang dijelaskan oleh Olderog dan Dierks.
1 Pada perlintasan kereta api terdapat sifat keamanan yangdijelaskan sebagai berikut:"pada saat kapanpun ketika kereta melintasi perlintasan makapintu gerbang perlintasan (portal) harus tertutup".
2 Selanjutnya sifat keamanan tersebut dijadikan sebagai formulaspesifikasi dari SWN yang akan ditinjau kebenarannya (Spec).
3 Terdapat beberapa formulasi asumsi dan formulasi pengontrolyang dijelaskan sebagai berikut:
1 (Keadaan awal, Init) Mula-mula jalur kereta api yang diamatidalam keadaan kosong (tidak ada kereta pada jalur tersebut).Dalam hal ini jalur perlintasan kereta api merupakansubhimpunan bagian sejati dari jalur kereta api yang diamati.
Contoh Formalisasi SWN dengan Menggunakan KalkulusDurasi II
2 (Asumsi, Asm) Kereta paling cepat memerlukan waktu εuntuk melintasi perlintasan setelah terdeteksi pada jalur keretaapi yang diamati.
3 (Kontrol, Ctrl) Portal perlintasan harus segera ditutup ketikajalur kereta api yang diamati tidak kosong untuk waktu ε
4 Selanjutnya akan dilakukan formalisasi dengan menggunakankalkulus durasi.
1 Pertama definisikan himpunan variabel status SVar sebagaiSVar = {E ,Cr ,Cl}, dengan E , Cr , dan Cl didefinisikansebagai berikut.
1 E merupakan variabel status yang bernilai 1 ketika jalur yangdiamati dalam keadaan kosong (tidak ada kereta pada jalurtersebut).
2 Cr merupakan variabel status yang bernilai 1 ketika terdapatkereta yang melintasi perlintasan kereta api. Cukup jelasbahwa apabila E (t) = 1 maka Cr (t) = 0.
Contoh Formalisasi SWN dengan Menggunakan KalkulusDurasi III
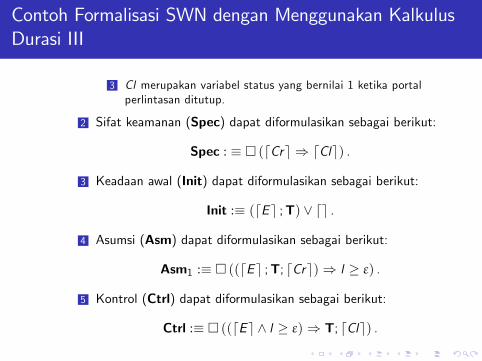
3 Cl merupakan variabel status yang bernilai 1 ketika portalperlintasan ditutup.
2 Sifat keamanan (Spec) dapat diformulasikan sebagai berikut:
Spec : ≡ � (dCre ⇒ dCle) .
3 Keadaan awal (Init) dapat diformulasikan sebagai berikut:
Init :≡ (dEe ;T) ∨ de .
4 Asumsi (Asm) dapat diformulasikan sebagai berikut:
Asm1 :≡ � ((dEe ;T; dCre)⇒ l ≥ ε) .
5 Kontrol (Ctrl) dapat diformulasikan sebagai berikut:
Ctrl :≡ � ((dEe ∧ l ≥ ε)⇒ T; dCle) .

Contoh Formalisasi SWN dengan Menggunakan KalkulusDurasi IV
5 Verifikasi dilakukan dengan membuktikan bahwa formula yangdidefinisikan sebagai berikut
Ctrl∧Asm∧ Init⇒ Spec,
merupakan formula yang absah (valid).

Translasi dari LTL ke Kalkulus Durasi pada AVC I
Formalisasi AVC dengan menggunakan kalkulus durasi yang akandijelaskan berikut ini menggunakan metode translasi dari formulalogika lain, yaitu formula logika temporal linier (LTL). LTL yangakan ditranslasi berasal dari interpretasi behavior tree yang telahdijelaskan.
1 Misalkan Vh merupakan variabel status yang menyatakankendaraan melalui loop coil, Lc merupakan variabel statusyang menyatakan loop coil mendeteksi kendaraan, makadapat diperoleh spesifikasi sebagai berikut:"Pada saat kapanpun, ketika kendaraan melalui loop coil,maka loop coil mendeteksi kendaraan."Spesifikasi ini dapat diformulasikan sebagai
� (dVhe ⇒ dLce) .

Translasi dari LTL ke Kalkulus Durasi pada AVC II
Selanjutnya spesifikasi yang lain dapat dijelaskan sebagaiberikut:"Pada saat kapanpun, ketika tidak terdapat kendaraan yangmelalui loop coil, maka loop coil tidak akan mendeteksikendaraan."Spesifikasi ini dapat diformulasikan sebagai
� (d¬Vhe ⇒ d¬Lce) .
2 Misalkan Tac merupakan variabel status yang menyatakantreadle axle counter ditekan, Ac merupakan variabel statusyang menyatakan axle counter melakukan inkrementasiterhadap banyaknya gandar kendaraan, maka dapat diperolehspesifikasi sebagai berikut:

Translasi dari LTL ke Kalkulus Durasi pada AVC III
"Pada saat kapanpun, ketika treadle axle counter ditekan,maka axle counter melakukan inkrementasi terhadapbanyaknya gandar kendaraan".Spesifikasi ini dapat diformulasikan sebagai
� (dTace ⇒ dAce) .
3 Misalkan Obs merupakan variabel status yang menyatakanoptical beam sensor mendeteksi kendaraan baru, Ussmerupakan variabel status yang menyatakan ultrasonic sensormendeteksi kendaraan (bus/ bukan), maka dapat diperolehspesifikasi sebagai berikut:"Pada saat kapanpun, ketika kendaraan melalui loop coil,maka optical beam sensor dan ultrasonic sensor akan segerabekerja"
Translasi dari LTL ke Kalkulus Durasi pada AVC IV
Spesifikasi ini dapat diformulasikan sebagai
� (dVhe ⇒ (T; dObse) ∧ (T; dUsse)) .
4 Misalkan Tdw merupakan variabel status yang menyatakantreadle-double wheel ditekan, Dw merupakan variabel statusyang menyatakan AVC mengklasifikasikan kendaraan ke dalamkelompok kendaraan dengan roda ganda, maka dapat dipeolehspesifikasi sebagai berikut:"Pada saat kapanpun, ketika sensor treadle-double wheelditekan, maka AVC akan mengklasifikasikan kendaraan kedalam kelompok kendaraan dengan roda ganda."Spesifikasi ini dapat diformulasikan sebagai
� (dTdwe ⇒ dDwe) .

Translasi dari LTL ke Kalkulus Durasi pada AVC V
5 Misalkan Crd merupakan variabel status yang menyatakanAVC menghasilkan kartu tol yang sesuai dengan jeniskendaraan yang melewati gerbang tol, maka dapat diperolehspesifikasi sebagai berikut:"Pada saat kapanpun, ketika kendaraan melalui loop coil,maka AVC akan menghasilkan kartu tol yang sesuai denganjenis kendaraan yang melewati gerbang tol."Spefikasi ini dapat diformulasikan sebagai
� (dVhe ⇒ dTCrde) .
Kekurangan dari metode formalisasi dengan cara translasi adalahpendefinisian variabel status menjadi lebih rumit bila dibandingkandengan formalisasi dengan cara membangun dari awal.

Rencana selanjutnya I
Pada dasarnya formalisasi AVC dengan menggunakan kalkulusdurasi dapat dilakukan dengan cara membangun formalisasi dariawal apabila keterkaitan antar sensor sudah terdefinisi dengan baik.Salah satu solusi untuk memperoleh definisi keterkaitan antarsensor dengan cukup baik adalah dengan meninjau diagram berikutini.

Rencana selanjutnya II
Gambar 2: Keterhubungan antar sensor.
TERIMA KASIHATAS
PERHATIAN ANDA

Referensi
1 Olderog, E.R, Dierks, H. 2008. Real-Time Systems: FormalSpecification and Automatic Verification. Cambridge.
2 Chaochen, Z., M.R. Hansen. 2003. Duration Calculus: AFormal Approach to Real Time Systems. Cambridge