perencanaan dan pembuatan prototipe …eprints.ums.ac.id/56730/17/naskah publikasi.pdf1 mendesain...
TRANSCRIPT

PERENCANAAN DAN PEMBUATAN PROTOTIPE
SISTEM KEMUDI KENDARAAN EMPAT RODA
DENGAN SUDUT HINGGA 90˚
Disusun sebagai salah satu syarat menyelesaikan Program Studi Strata II pada Jurusan
Magister Teknik Mesin
Oleh :
Fani Nur Fadhila Ichsan
NIM U 100 140 014
PROGRAM STUDI MAGISTER TEKNIK MESIN
SEKOLAH PASCA SARJANA
UNIVERSITAS MUHAMMADIYAH SURAKARTA
2017
i
ii

iii

1
MENDESAIN PROTOTIPE SISTEM KEMUDI EMPAT RODA DENGAN SUDUT
HINGGA 90˚ PADA KENDARAAN YANG BERPENGGERAK PADA SEMUA RODA
Abstrak
Zaman sekarang kemajuan dan perkembangan teknologi sangat pesat, terutama pada industri
otomotif. Banyak teknologi baru yang diterapkan pada kendaraan dengan fungsi bermacam-
macam seperti peningkatan keamanan sampai teknologi yang mempermudah pengemudinya untuk
mengoperasikan dan mengendalikan kendaraan. Tujuan penelitian ini adalah untuk menganalisa
mekanisme sistem kemudi dengan sudut belok 90˚ yang bisa digunakan pada kendaraan segala
medan dan kendaraan yang berpenggerak pada semua roda. Metode penelitian diawali dengan
mempersiapkan semua alat dan komponen yang diperlukan lalu dibuat perencanaan perakitan.
Dilanjutkan dengan pemodelan atau desain menggunakan software CATIA V5 dan diassembly
setelah desain seluruh komponen selesai. Dari assembly komponen pada CATIA V5 tersebut
dilakukan analisa tegangan Von Mises dan displacement yang terjadi pada komponen dengan
variasi torsi 250 Nm, 280 Nm, dan 300 Nm dan dilanjutkan dengan simulasi gerak menggunakan
CATIA V5 hingga hasil menunjukkan tidak adanya tumbukan antar komponen lalu dibuatlah
prototipe-nya di bengkel tehnik. Hasil dari analisa struktur material menunjukan bahwa tegangan
von mises yang terjadi tidak melebihi yield strength material baja yaitu 2,5+008 N/m2 dan
displacement yang terjadi sangat kecil dibawah 1 mm, dalam kategori aman untuk selanjutnya
dilakukan simulasi gerak. Pada simulasi gerak tidak memperlihatkan adanya tumbukan yang
signifikan antar komponen, hanya terdapat gesekan kecil karena seluruh bagian komponen
berputar. Dalam akhir penelitian prototipe berhasil dibuat sesuai dengan desain awal.
Kata kunci: Sistem kemudi, CATIA, simulasi, von mises, prototipe.
Abstract
Today's technological advances and developments are very rapid, especially in the automotive
industry. Many new technologies applied to vehicles with various functions such as security
upgrades and technologies that make it easier for drivers to operate and control vehicles. The
purpose of this study is to analyze the mechanism of the steering system with 90˚ turn angle that
can be use on all-terrain vehicles and all-wheeled vehicles. Research method begins by preparing
all the necessary tools and components then made assembly planning. Followed by modeling or
design using CATIA V5 software and assembled after all component design is complete. From the
assembled component in CATIA V5, Von Misses stress and displacement analysis performed on
components with torque variation of 250 Nm, 280 Nm, and 300 Nm and continues with motion
simulation using CATIA V5 until the result showed no collision between components and then
made the prototype at the technical workshop. The result of the material structure analysis shows
that the von Misses stress does not exceed the yield strength of steel material properties that is
2.5+008 N/m 2 and the displacement is very small below 1 mm which is in the safe category for
next motion simulation. Motion simulation does not show any significant collisions between
components, there is only a small friction because all parts of the component rotate. In the end, the
prototype successfully made according to the initial design.
Keywords: CATIA, prototipe, simulation, steering system, von mises.

2
1. PENDAHULUAN
Perkembangan teknologi yang semakin cepat mendorong manusia untuk mengembangkan
produk teknologi yang lebih baik dari sebelumnya. Dalam dunia otomotif khususnya mobil
terdapat banyak sistem yang bekerja. Sistem-sistem tersebut bekerja saling berkaitan antara satu
dengan yang lain, dan salah satunya adalah sistem kemudi. Tipe dari sistem kemudi mobil ini
bermacam-macam tergantung dari jenis kendaraan serta desain dari produsen mobil. Desain dari
sistem kemudi ini menentukan tingkat keamanan dan kenyamanan saat berkendara. Karena pada
sekarang ini banyak mobil-mobil modern yang mempunyai ban lebar dengan tekanan yang rendah,
sehingga mengakibatkan bidang singgung ban dengan permukaan jalan semakin besar, hal ini juga
mempengaruhi tenaga yang akan dibutuhkan saat memutar sistem kemudi menjadi bertambah.
Pada system kemudi tipe rack dan pinion, usaha memutar kemudi dapat dikurangi dengan
memperbesar perbandingan gigi (gear ratio) pada sistem kemudi, tetapi ini akan mengakibatkan
usaha untuk memutar roda kemudi semakin besar pada saat kendaraan berbelok, terutama pada
belokan tajam. Oleh karena itu, analisa gerak kinematik pada steering diperlukan agar diperoleh
desain yang sesuai dengan yang dibutuhkan.Untuk mengembangkan sistem kemudi yang sesuai
dengan permintaan perlu dilakukan pengujian baik secara langsung pada kendaraan maupun
melalui pengujian laboratorium.
Pada mobil bersistem 2 Wheel Steering, kendali arah tertumpu pada sudut belok roda
depan (δf). Karena sifat ban dan pengaruh parameter dinamis kendaraan, timbul sudut slip saat
mobil bergerak belok. Bila mobil tersebut bergerak belok pada kecepatan tinggi, sudut slip dapat
mengakibatkan gerakan kendaraan tidak stabil (oversteer, understeer). Cara untuk mengatasi
keadaan ini adalah membatasi kecepatan kendaraan. Dari dua macam keadaan tidak stabil di atas,
oversteeringlah yang harus dihindari pengendara saat kecepatan mobil tinggi. Oversteer lebih
berbahaya dibandingkan understeer, karena menyebabkan arah belok kendaraan tidak menentu.
Cara lain untuk mengatasi oversteer ini adalah menggunakan sistem 4 wheel steering (4WS).
Dengan mengontrol sudut belok roda belakang (δr), oversteer dapat dihindari. Keuntungan 4WS
lainnya adalah dapat menghasilkan manuver kendaraan yang baik pada kecepatan rendah. Analisa
yang dibuat ini diharapkan dapat menghasilkan perumusan δr sebagai fungsi dari δf dan juga V,
yang membuat kendaraan berputar stabil pada kecepatan tinggi dan memiliki radius putar yang
kecil pada kecepatan rendah. Dengan kombinasi metoda Tanpa Side Slip dan skid kritis,
dihasilkan sudut belok roda belakang yang tidak menghasilkan skid saat kendaraan berbelok serta
radiusputar kendaraan yang kecil, baik pada kecepatan rendah maupun kecepatan tinggi. Akhirnya
dapat diperoleh konstruksi dari kendaraan yang lebih stabil. Maka dari itu dapat dijabarkan
rencana strategis untuk menyelesaikan masalah tersebut. Diantaranya adalah pengembangan
sistem dan teknologi transportasi yang berkaitan dengan proposal riset ini. Berdasarkan rencana
3
strategis tersebut maka muncul tema-tema penelitian, salah satunya adalah pengembangan
teknologi transportasi yang berkelanjutan.
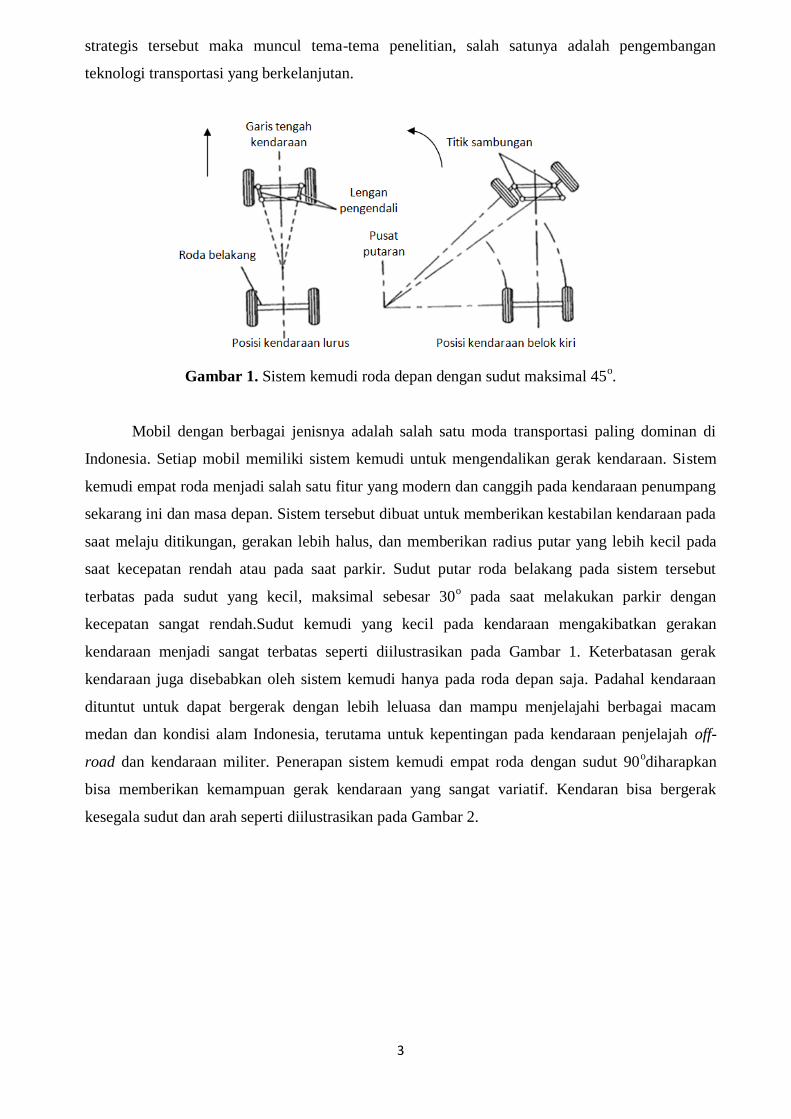
Gambar 1. Sistem kemudi roda depan dengan sudut maksimal 45o.
Mobil dengan berbagai jenisnya adalah salah satu moda transportasi paling dominan di
Indonesia. Setiap mobil memiliki sistem kemudi untuk mengendalikan gerak kendaraan. Sistem
kemudi empat roda menjadi salah satu fitur yang modern dan canggih pada kendaraan penumpang
sekarang ini dan masa depan. Sistem tersebut dibuat untuk memberikan kestabilan kendaraan pada
saat melaju ditikungan, gerakan lebih halus, dan memberikan radius putar yang lebih kecil pada
saat kecepatan rendah atau pada saat parkir. Sudut putar roda belakang pada sistem tersebut
terbatas pada sudut yang kecil, maksimal sebesar 30o pada saat melakukan parkir dengan
kecepatan sangat rendah.Sudut kemudi yang kecil pada kendaraan mengakibatkan gerakan
kendaraan menjadi sangat terbatas seperti diilustrasikan pada Gambar 1. Keterbatasan gerak
kendaraan juga disebabkan oleh sistem kemudi hanya pada roda depan saja. Padahal kendaraan
dituntut untuk dapat bergerak dengan lebih leluasa dan mampu menjelajahi berbagai macam
medan dan kondisi alam Indonesia, terutama untuk kepentingan pada kendaraan penjelajah off-
road dan kendaraan militer. Penerapan sistem kemudi empat roda dengan sudut 90odiharapkan
bisa memberikan kemampuan gerak kendaraan yang sangat variatif. Kendaran bisa bergerak
kesegala sudut dan arah seperti diilustrasikan pada Gambar 2.
4
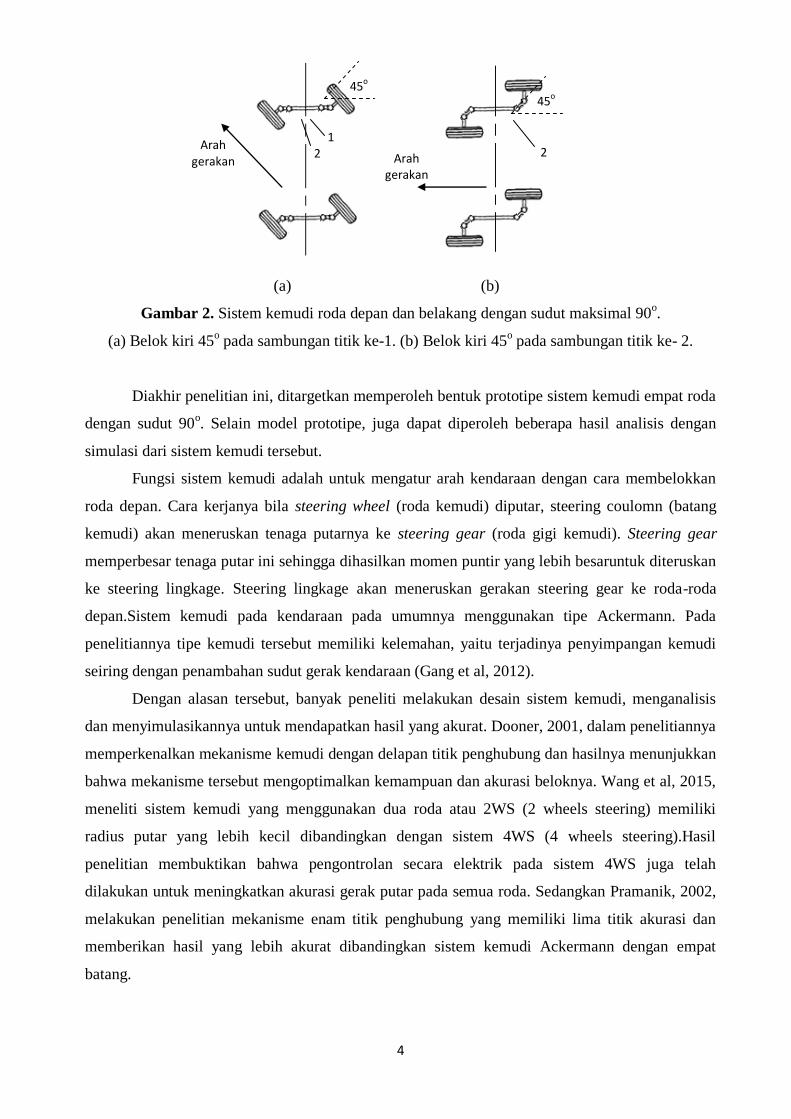
(a) (b)
Gambar 2. Sistem kemudi roda depan dan belakang dengan sudut maksimal 90o.
(a) Belok kiri 45o pada sambungan titik ke-1. (b) Belok kiri 45
o pada sambungan titik ke- 2.
Diakhir penelitian ini, ditargetkan memperoleh bentuk prototipe sistem kemudi empat roda
dengan sudut 90o. Selain model prototipe, juga dapat diperoleh beberapa hasil analisis dengan
simulasi dari sistem kemudi tersebut.
Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan
roda depan. Cara kerjanya bila steering wheel (roda kemudi) diputar, steering coulomn (batang
kemudi) akan meneruskan tenaga putarnya ke steering gear (roda gigi kemudi). Steering gear
memperbesar tenaga putar ini sehingga dihasilkan momen puntir yang lebih besaruntuk diteruskan
ke steering lingkage. Steering lingkage akan meneruskan gerakan steering gear ke roda-roda
depan.Sistem kemudi pada kendaraan pada umumnya menggunakan tipe Ackermann. Pada
penelitiannya tipe kemudi tersebut memiliki kelemahan, yaitu terjadinya penyimpangan kemudi
seiring dengan penambahan sudut gerak kendaraan (Gang et al, 2012).
Dengan alasan tersebut, banyak peneliti melakukan desain sistem kemudi, menganalisis
dan menyimulasikannya untuk mendapatkan hasil yang akurat. Dooner, 2001, dalam penelitiannya
memperkenalkan mekanisme kemudi dengan delapan titik penghubung dan hasilnya menunjukkan
bahwa mekanisme tersebut mengoptimalkan kemampuan dan akurasi beloknya. Wang et al, 2015,
meneliti sistem kemudi yang menggunakan dua roda atau 2WS (2 wheels steering) memiliki
radius putar yang lebih kecil dibandingkan dengan sistem 4WS (4 wheels steering).Hasil
penelitian membuktikan bahwa pengontrolan secara elektrik pada sistem 4WS juga telah
dilakukan untuk meningkatkan akurasi gerak putar pada semua roda. Sedangkan Pramanik, 2002,
melakukan penelitian mekanisme enam titik penghubung yang memiliki lima titik akurasi dan
memberikan hasil yang lebih akurat dibandingkan sistem kemudi Ackermann dengan empat
batang.
1 2 2
45o 45o
Arah gerakan
Arah gerakan

5
Tujuan sistem kemudi 4WS adalah stabilitas yang lebih baik saat menyalip atau manuver,
pengurangan osilasi kendaraan di sekitar sumbu vertikal, mengurangi kepekaan terhadap angin
lateral, perilaku netral saat menikung seperti peningkatan keamanan yang aktif. (P Brabec, 2004),
juga meneliti mengenai sistem kontrol kemudi 4WSdengan model 1:5 dari ukuran kendaraan
aslinya. Hasil penelitian tersebut menunjukkan bahwa dengan menggunakan control komputer
dalam model, kita akan bisa menilai beberapa jenis algoritma untuk kemudi roda belakang.
Algoritma ini akan dioptimalkan sesuai dengan ukuran dan arah percepatan lateral. Sampai
sekarang ini, penelitian sistem kemudi 4WS masih terbatas untuk sudut putar 45o pada roda depan
dan 30o pada roda belakang. Penelitian ini akan terfokus pada sistem kemudi 4WS dengan sudut
90o baik pada roda depan maupun belakang. Studi pendahuluan tentang sistem 4WS telah
dilakukan sampai dengan tahap desain dan assembly atau simulasi perakitan. Gambar 2
menunjukkan ilustrasi bentuk gabungan dari sistem kemudi 4WS pada saat posisi sudut kemudi 0o
untuk gerakan lurus.
Sistem kemudi atau Steering system berfungsi untuk mengatur arah kendaraan dengan cara
membelokkan roda sesuai kehendak pengemudi. Sistem pengendalian empat roda saat ini telah
dikembangkan, dimana pada umumnya roda yang dikendalikan adalah kedua roda depan.
Perubahan atau perkembangan sistem kemudi harus tetap dikendalikan dengan mudah agar roda
tidak terseret saat kendaraan sedang berbelok. Dalam sistem kemudi terdapat banyak komponen,
namun yang sangat menentukan batas atau jangkauan sudut belok adalah CJ joint.
Fungsi axle shaft adalah sebagai penumpu beban roda atau dudukan roda dan penerus
putaran mesin ke roda. Axle shaft dibagi menjadi axle shaft rigid dan independent axle shaft. Tipe
rigid banyak digunakan pada kendaraan berskala menengah keatas dengan muatan yang besar,
juga pada kendaraan yang dirancang untuk medan - medan berat karena mampu menahan beban
yang berat. Tipe ini sering digunakan pada kendaraan kecil dan umumnya jenis sedan, karena tipe
ini disamping kontruksinya ringan juga mampu membuat sudut belok lebih besar.
Gambar 3. Axle Shaft pada kendaraan
Dengan dilengkapi CV joint maka pada saat kendaraan melaju di jalan yang bergelombang
maka posisi bodi kendaraan seakan-akan tidak terpengaruhi oleh keadaan jalan, karena dengan
dilengkapi CV joint pada setiap gerakan, disamping dapat bergerak putar juga dapat bergerak
6
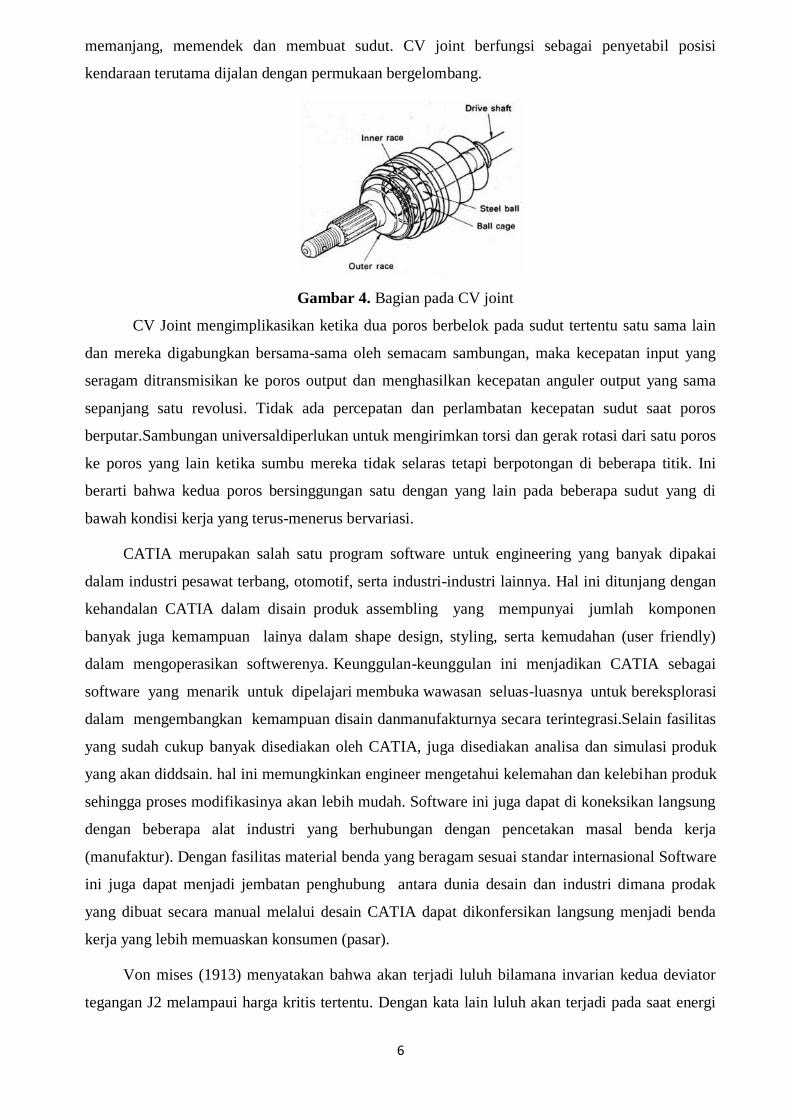
memanjang, memendek dan membuat sudut. CV joint berfungsi sebagai penyetabil posisi
kendaraan terutama dijalan dengan permukaan bergelombang.
Gambar 4. Bagian pada CV joint
CV Joint mengimplikasikan ketika dua poros berbelok pada sudut tertentu satu sama lain
dan mereka digabungkan bersama-sama oleh semacam sambungan, maka kecepatan input yang
seragam ditransmisikan ke poros output dan menghasilkan kecepatan anguler output yang sama
sepanjang satu revolusi. Tidak ada percepatan dan perlambatan kecepatan sudut saat poros
berputar.Sambungan universaldiperlukan untuk mengirimkan torsi dan gerak rotasi dari satu poros
ke poros yang lain ketika sumbu mereka tidak selaras tetapi berpotongan di beberapa titik. Ini
berarti bahwa kedua poros bersinggungan satu dengan yang lain pada beberapa sudut yang di
bawah kondisi kerja yang terus-menerus bervariasi.
CATIA merupakan salah satu program software untuk engineering yang banyak dipakai
dalam industri pesawat terbang, otomotif, serta industri-industri lainnya. Hal ini ditunjang dengan
kehandalan CATIA dalam disain produk assembling yang mempunyai jumlah komponen
banyak juga kemampuan lainya dalam shape design, styling, serta kemudahan (user friendly)
dalam mengoperasikan softwerenya. Keunggulan-keunggulan ini menjadikan CATIA sebagai
software yang menarik untuk dipelajari membuka wawasan seluas-luasnya untuk bereksplorasi
dalam mengembangkan kemampuan disain danmanufakturnya secara terintegrasi.Selain fasilitas
yang sudah cukup banyak disediakan oleh CATIA, juga disediakan analisa dan simulasi produk
yang akan diddsain. hal ini memungkinkan engineer mengetahui kelemahan dan kelebihan produk
sehingga proses modifikasinya akan lebih mudah. Software ini juga dapat di koneksikan langsung
dengan beberapa alat industri yang berhubungan dengan pencetakan masal benda kerja
(manufaktur). Dengan fasilitas material benda yang beragam sesuai standar internasional Software
ini juga dapat menjadi jembatan penghubung antara dunia desain dan industri dimana prodak
yang dibuat secara manual melalui desain CATIA dapat dikonfersikan langsung menjadi benda
kerja yang lebih memuaskan konsumen (pasar).
Von mises (1913) menyatakan bahwa akan terjadi luluh bilamana invarian kedua deviator
tegangan J2 melampaui harga kritis tertentu. Dengan kata lain luluh akan terjadi pada saat energi

7
distorsi atau energi regangan geser dari material mencapai suatu nilai kritis tertentu. Secara
sederhana dapat dikatakan bahwa energi distorsi adalah bagian dari energi regangan total per unit
volume yang terlibat di dalam perubahan bentuk. Dalam kasus ini, material dikatakan mulai luluh
ketika tegangan von Mises mencapai nilai kritis yang diketahui sebagai yield strength. Tegangan
von Mises digunakan untuk meprediksi tingkat keluluhan material terhadap kondisi pembebanan
Perhatian terhadap kualitas yang terbaik adalah bukan pada produk akhir. Hal ini penting
agar produk akhir yang dihasilkan adalah produk yang bebas cacat dan tidak ada lagi pemborosan
karena produk tersebut dibuang atau dikerjakan ulang. Maka sebaiknya perhatian terhadap kualitas
harus dimulai pada saat awal pembangunan produk. Tahapan yang sangat penting dalam
perencanaan awal pembuatan produk adalah pembuatan prototipe produk. Prototipe produk
(purwa–rupaproduk) adalah bentuk dasar dari sebuah produk merupakan tahapan yang sangat
penting dalam rencana pembuatan produk karena menyangkut keunggulan produk yang akan
menentukan kemajuan suatu usaha di masa mendatang. Sebagai bentuk dasar produk, prototipe
memiliki bagian yang ukuran dan bahan sama seperti jenis produk yang akan dibuat tetapi tidak
harus difabrikasi dengan proses sebenarnya ditujukan untuk pengetesan untuk menentukan apakah
produk bekerja sesuai desain yang diinginkan dan apakah produk memuaskan
2. METODE
Penelitian dilakukan di laboratorium Teknik Mesin UMS, diantaranya yaitu lab. Produksi
dan lab CAD/CAM/CATIA dan bengkel tehnik diluar kampus.Indikator keberhasilan dari
penelitian:
1. Terbentuknya produk gabungan atau assembly dari sistem kemudi 4WS, termasuk
analisis gerak kinematika dan analisis kekuatan materialnya.
2. Terbentuknya prototipe sistem kemudi dengan sudut 90o.
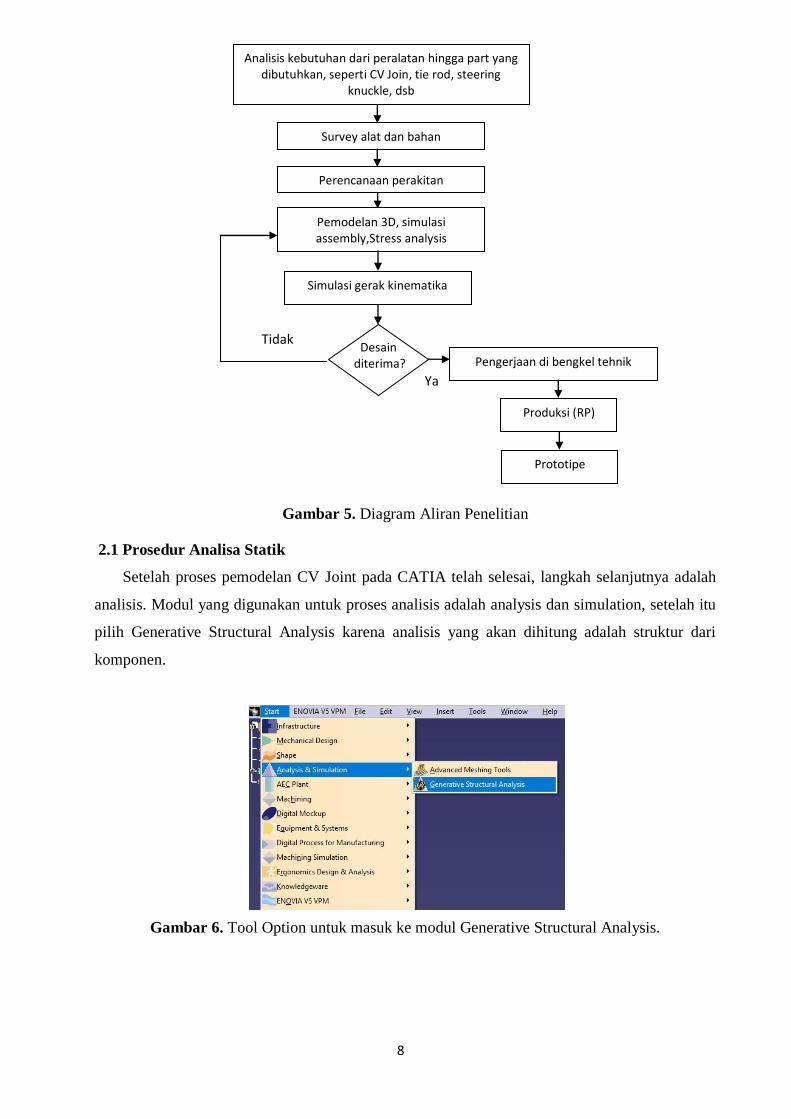
Berikut alur penelitian ini dilakukan:
8
Gambar 5. Diagram Aliran Penelitian
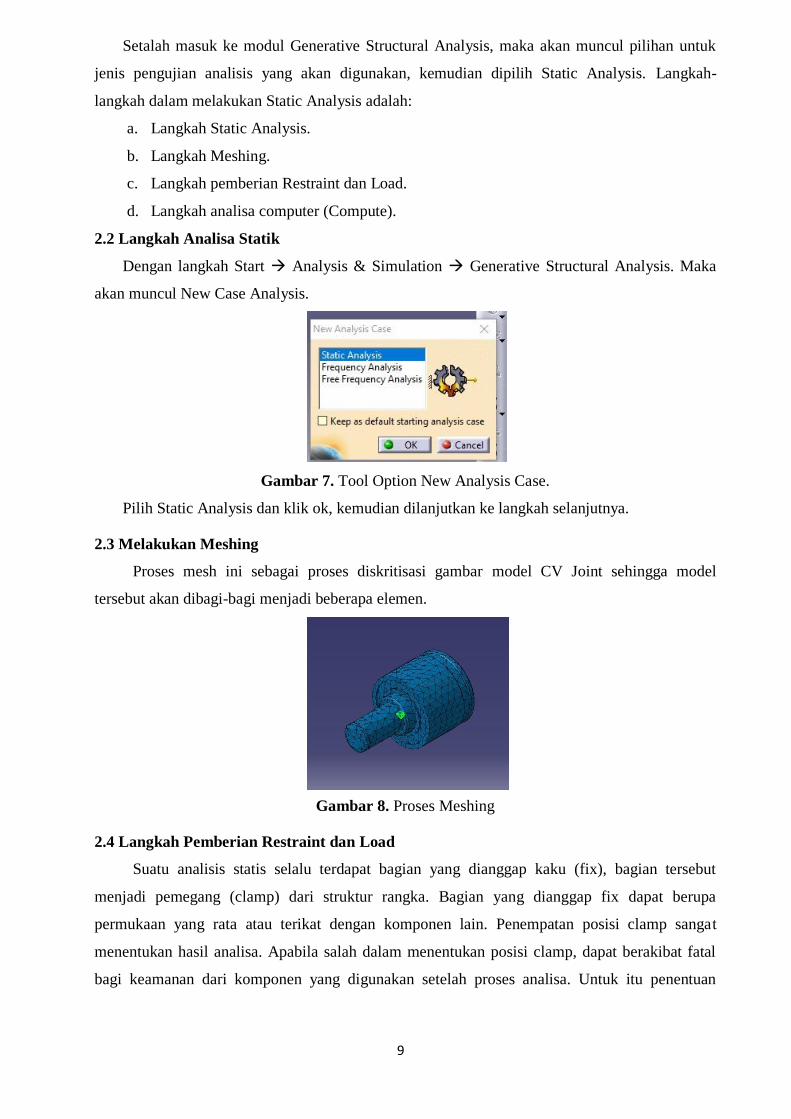
2.1 Prosedur Analisa Statik
Setelah proses pemodelan CV Joint pada CATIA telah selesai, langkah selanjutnya adalah
analisis. Modul yang digunakan untuk proses analisis adalah analysis dan simulation, setelah itu
pilih Generative Structural Analysis karena analisis yang akan dihitung adalah struktur dari
komponen.
Gambar 6. Tool Option untuk masuk ke modul Generative Structural Analysis.
Pemodelan 3D, simulasi assembly,Stress analysis
Produksi (RP)
Prototipe
Simulasi gerak kinematika
Desain diterima?
Tidak
Ya
Survey alat dan bahan
Pengerjaan di bengkel tehnik
Perencanaan perakitan
Analisis kebutuhan dari peralatan hingga part yang dibutuhkan, seperti CV Join, tie rod, steering
knuckle, dsb
9
Setalah masuk ke modul Generative Structural Analysis, maka akan muncul pilihan untuk
jenis pengujian analisis yang akan digunakan, kemudian dipilih Static Analysis. Langkah-
langkah dalam melakukan Static Analysis adalah:
a. Langkah Static Analysis.
b. Langkah Meshing.
c. Langkah pemberian Restraint dan Load.
d. Langkah analisa computer (Compute).
2.2 Langkah Analisa Statik
Dengan langkah Start Analysis & Simulation Generative Structural Analysis. Maka
akan muncul New Case Analysis.
Gambar 7. Tool Option New Analysis Case.
Pilih Static Analysis dan klik ok, kemudian dilanjutkan ke langkah selanjutnya.
2.3 Melakukan Meshing
Proses mesh ini sebagai proses diskritisasi gambar model CV Joint sehingga model
tersebut akan dibagi-bagi menjadi beberapa elemen.
Gambar 8. Proses Meshing
2.4 Langkah Pemberian Restraint dan Load
Suatu analisis statis selalu terdapat bagian yang dianggap kaku (fix), bagian tersebut
menjadi pemegang (clamp) dari struktur rangka. Bagian yang dianggap fix dapat berupa
permukaan yang rata atau terikat dengan komponen lain. Penempatan posisi clamp sangat
menentukan hasil analisa. Apabila salah dalam menentukan posisi clamp, dapat berakibat fatal
bagi keamanan dari komponen yang digunakan setelah proses analisa. Untuk itu penentuan
10
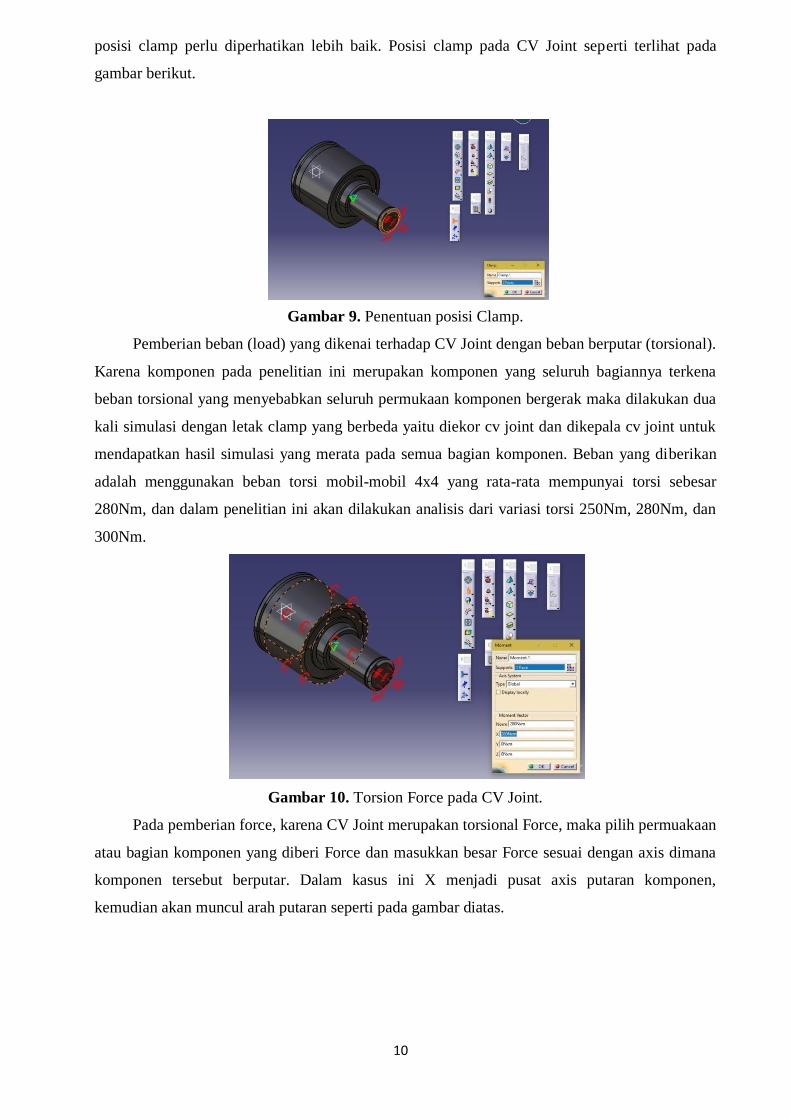
posisi clamp perlu diperhatikan lebih baik. Posisi clamp pada CV Joint seperti terlihat pada
gambar berikut.
Gambar 9. Penentuan posisi Clamp.
Pemberian beban (load) yang dikenai terhadap CV Joint dengan beban berputar (torsional).
Karena komponen pada penelitian ini merupakan komponen yang seluruh bagiannya terkena
beban torsional yang menyebabkan seluruh permukaan komponen bergerak maka dilakukan dua
kali simulasi dengan letak clamp yang berbeda yaitu diekor cv joint dan dikepala cv joint untuk
mendapatkan hasil simulasi yang merata pada semua bagian komponen. Beban yang diberikan
adalah menggunakan beban torsi mobil-mobil 4x4 yang rata-rata mempunyai torsi sebesar
280Nm, dan dalam penelitian ini akan dilakukan analisis dari variasi torsi 250Nm, 280Nm, dan
300Nm.
Gambar 10. Torsion Force pada CV Joint.
Pada pemberian force, karena CV Joint merupakan torsional Force, maka pilih permuakaan
atau bagian komponen yang diberi Force dan masukkan besar Force sesuai dengan axis dimana
komponen tersebut berputar. Dalam kasus ini X menjadi pusat axis putaran komponen,
kemudian akan muncul arah putaran seperti pada gambar diatas.
11
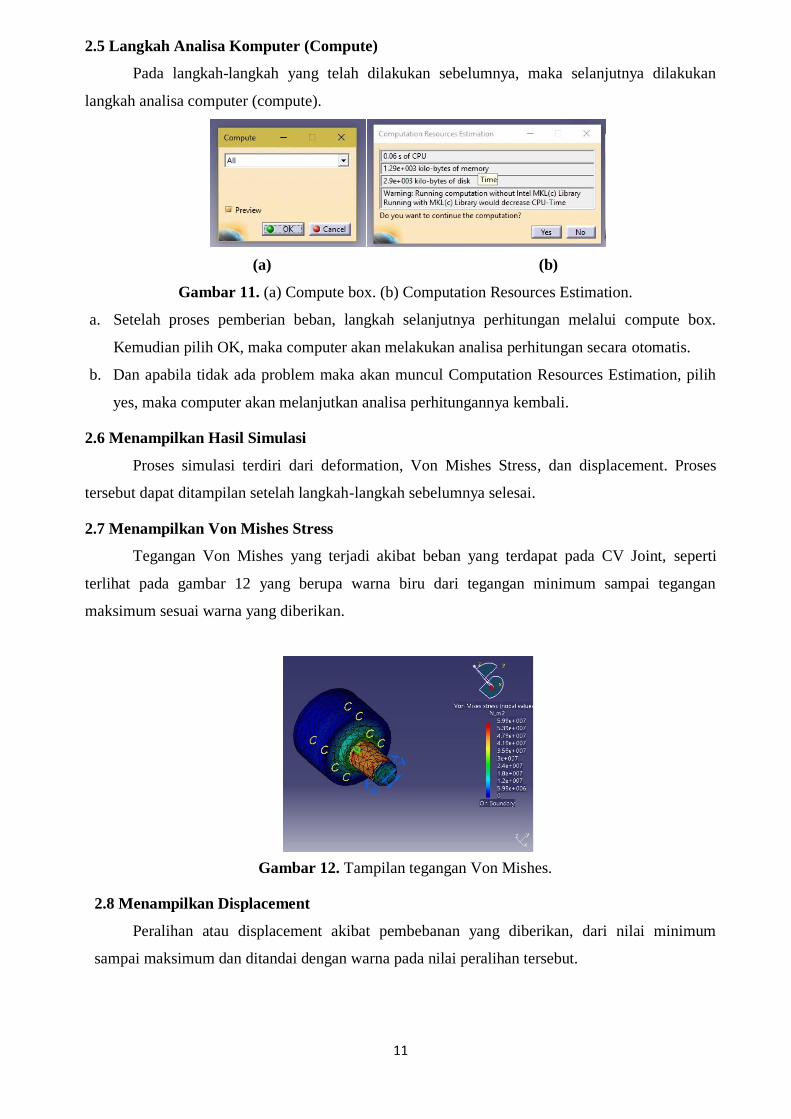
2.5 Langkah Analisa Komputer (Compute)
Pada langkah-langkah yang telah dilakukan sebelumnya, maka selanjutnya dilakukan
langkah analisa computer (compute).
(a) (b)
Gambar 11. (a) Compute box. (b) Computation Resources Estimation.
a. Setelah proses pemberian beban, langkah selanjutnya perhitungan melalui compute box.
Kemudian pilih OK, maka computer akan melakukan analisa perhitungan secara otomatis.
b. Dan apabila tidak ada problem maka akan muncul Computation Resources Estimation, pilih
yes, maka computer akan melanjutkan analisa perhitungannya kembali.
2.6 Menampilkan Hasil Simulasi
Proses simulasi terdiri dari deformation, Von Mishes Stress, dan displacement. Proses
tersebut dapat ditampilan setelah langkah-langkah sebelumnya selesai.
2.7 Menampilkan Von Mishes Stress
Tegangan Von Mishes yang terjadi akibat beban yang terdapat pada CV Joint, seperti
terlihat pada gambar 12 yang berupa warna biru dari tegangan minimum sampai tegangan
maksimum sesuai warna yang diberikan.
Gambar 12. Tampilan tegangan Von Mishes.
2.8 Menampilkan Displacement
Peralihan atau displacement akibat pembebanan yang diberikan, dari nilai minimum
sampai maksimum dan ditandai dengan warna pada nilai peralihan tersebut.

12
Gambar 13. Displacement yang terjadi pada CV Joint setelah diberikan beban.
2.9 Pembuataun Prototipe
Setelah semua langkah diatas selesai dilakukan dan hasil simulasi beserta analisis tidak
menunjukkan adanya cacat atau kegagalan, maka selanjutnya dapat dilakukan perakitan
prototype di bengkel yang sebelumnya sudah dipersiapkan komponen-komponennya.
3. HASIL DAN PEMBAHASAN
Keluaran yang diambil dari simulasi adalah sebaran dan besar tegangan yang dihasilkan,
dari sebaran dan besar tegangan tersebut, struktur dianalisis kekuatannya dari segi material,
apakah masih dalam batas aman kriteria yield atau tidak. Material cv joint akan dianalisa
menggunakan kriteria kegagalan yang sesuai dengan jenis materialnya yang ulet, yaitu Teori
Kegagalan Von Mises. Dalam penelitian ini dilakukan analisis dari variasi torsi kendaraan 4WS
yaitu 250Nm, 280Nm, dan 300Nm. Bagian-bagian cv joint yang disimulasikan mendapatkan
hasil yang berbeda, berikut adalah keluaran dari simulasi tersebut.
Sifat mekanik yang dimiliki oleh suatu material antara lain: kekuatan, keuletan, kekerasan
dan kekuatan lelah. Sifat mekanik dapat didefinisikan sebagai kemampuan material dalam
mendistribusikan dan menahan gaya serta tegangan yang terjadi. Berikut data properties material
dari bahan material cv joint yang digunakan yaitu baja (steel).
Gambar 14. Properties Material dari Baja/Steel.
3.1 Hasil Simulasi CV joint part 1
Setelah semua grafik dari hasil simulasi setiap varian beban torsional didapat, maka seluruh
hasil dibandingkan mulai dari tegangan von mises dan displacement yang terjadi pada cv joint
13
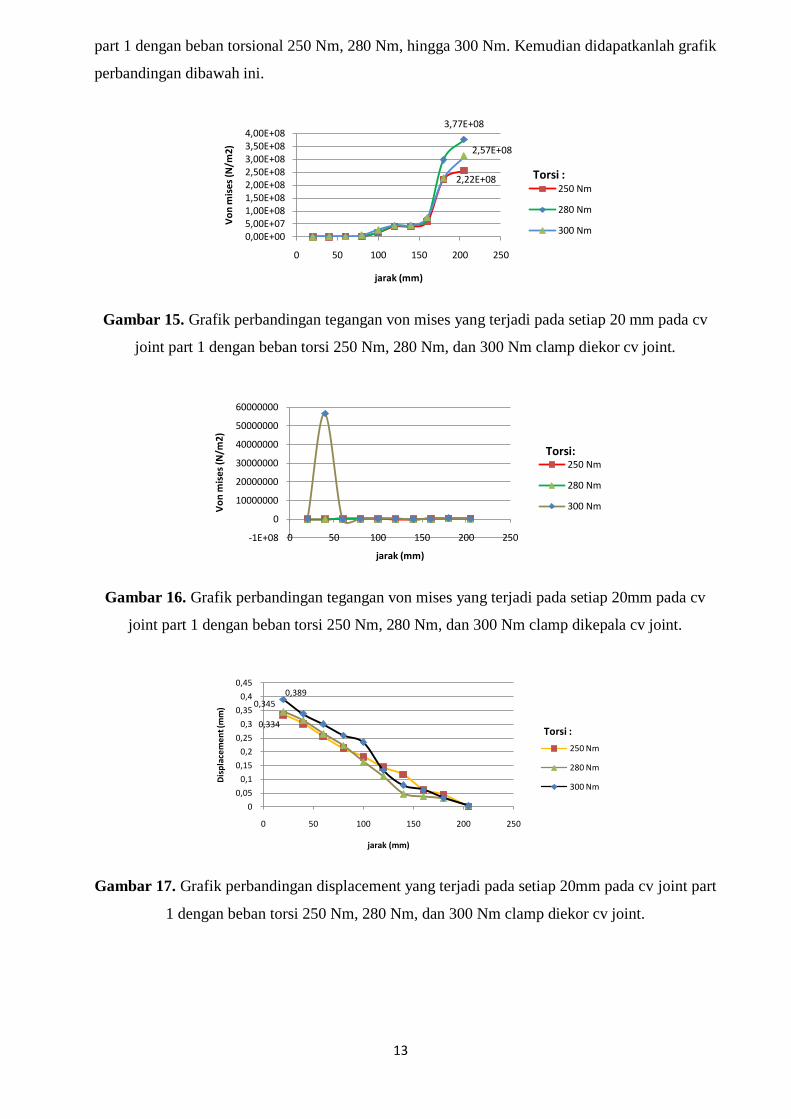
part 1 dengan beban torsional 250 Nm, 280 Nm, hingga 300 Nm. Kemudian didapatkanlah grafik
perbandingan dibawah ini.
Gambar 15. Grafik perbandingan tegangan von mises yang terjadi pada setiap 20 mm pada cv
joint part 1 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp diekor cv joint.
Gambar 16. Grafik perbandingan tegangan von mises yang terjadi pada setiap 20mm pada cv
joint part 1 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp dikepala cv joint.
Gambar 17. Grafik perbandingan displacement yang terjadi pada setiap 20mm pada cv joint part
1 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp diekor cv joint.
2,22E+08
2,57E+08
3,77E+08
0,00E+005,00E+071,00E+081,50E+082,00E+082,50E+083,00E+083,50E+084,00E+08
0 50 100 150 200 250
Vo
n m
ise
s (N
/m2)
jarak (mm)
Torsi :250 Nm
280 Nm
300 Nm
-1E+08
0
10000000
20000000
30000000
40000000
50000000
60000000
0 50 100 150 200 250
Vo
n m
ise
s (N
/m2)
jarak (mm)
Torsi:250 Nm
280 Nm
300 Nm
0,334
0,3450,389
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0 50 100 150 200 250
Dis
pla
cem
en
t (m
m)
jarak (mm)
Torsi :
250 Nm
280 Nm
300 Nm
14
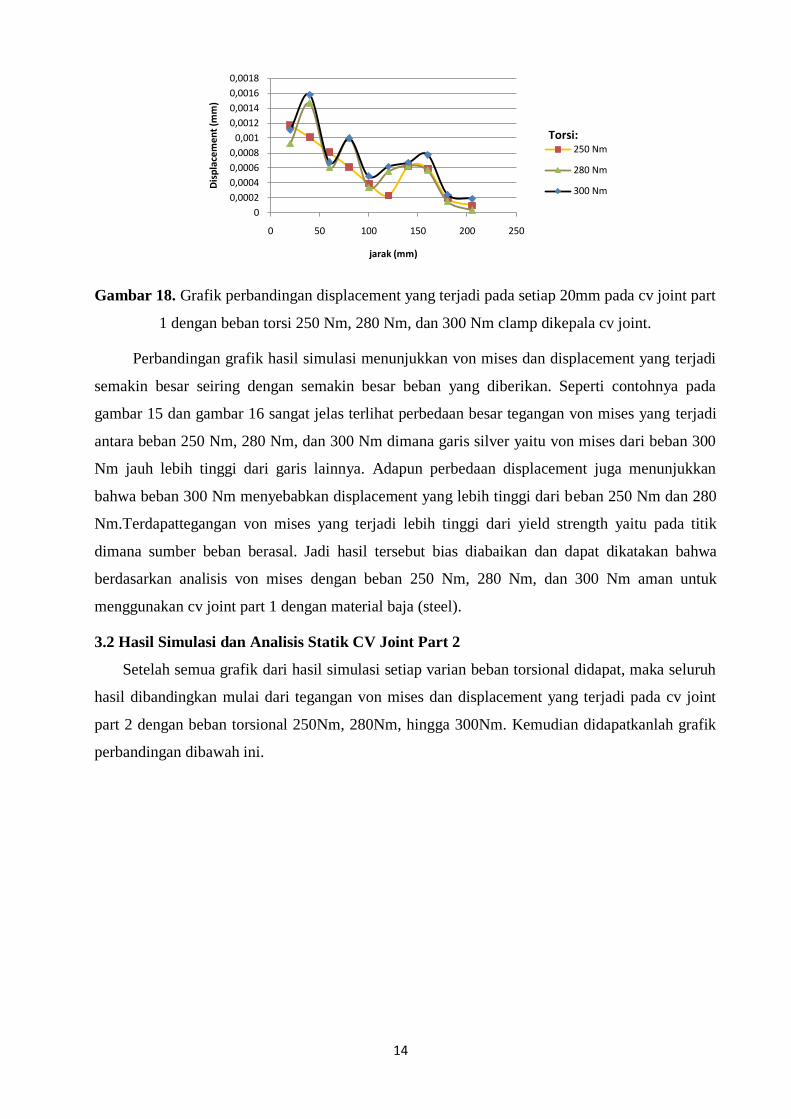
Gambar 18. Grafik perbandingan displacement yang terjadi pada setiap 20mm pada cv joint part
1 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp dikepala cv joint.
Perbandingan grafik hasil simulasi menunjukkan von mises dan displacement yang terjadi
semakin besar seiring dengan semakin besar beban yang diberikan. Seperti contohnya pada
gambar 15 dan gambar 16 sangat jelas terlihat perbedaan besar tegangan von mises yang terjadi
antara beban 250 Nm, 280 Nm, dan 300 Nm dimana garis silver yaitu von mises dari beban 300
Nm jauh lebih tinggi dari garis lainnya. Adapun perbedaan displacement juga menunjukkan
bahwa beban 300 Nm menyebabkan displacement yang lebih tinggi dari beban 250 Nm dan 280
Nm.Terdapattegangan von mises yang terjadi lebih tinggi dari yield strength yaitu pada titik
dimana sumber beban berasal. Jadi hasil tersebut bias diabaikan dan dapat dikatakan bahwa
berdasarkan analisis von mises dengan beban 250 Nm, 280 Nm, dan 300 Nm aman untuk
menggunakan cv joint part 1 dengan material baja (steel).
3.2 Hasil Simulasi dan Analisis Statik CV Joint Part 2
Setelah semua grafik dari hasil simulasi setiap varian beban torsional didapat, maka seluruh
hasil dibandingkan mulai dari tegangan von mises dan displacement yang terjadi pada cv joint
part 2 dengan beban torsional 250Nm, 280Nm, hingga 300Nm. Kemudian didapatkanlah grafik
perbandingan dibawah ini.
0
0,0002
0,0004
0,0006
0,0008
0,001
0,0012
0,0014
0,0016
0,0018
0 50 100 150 200 250
Dis
pla
cem
ent
(mm
)
jarak (mm)
Torsi:250 Nm
280 Nm
300 Nm

15
Gambar 19.Grafik perbandingan tegangan von mises yang terjadi pada setiap 50 mm pada cv
joint part 2 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp diekor cv joint.
Gambar 20.Grafik perbandingan tegangan von mises yang terjadi pada setiap 50 mm pada cv
joint part 2 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp dikepala cv joint.
Gambar 21.Grafik perbandingan displacement yang terjadi pada setiap 50 mm pada cv joint part
2 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp diekor cv joint.
1,03E+08
1,32E+081,41E+08
0,00E+00
2,00E+07
4,00E+07
6,00E+07
8,00E+07
1,00E+08
1,20E+08
1,40E+08
1,60E+08
0 100 200 300 400 500 600
Vo
n m
ise
s (N
/m2
)jarak (mm)
Torsi:
250 Nm
280 Nm
300 Nm
9,69E+06
1,11E+07
1,28E+07
0,00E+00
2,00E+06
4,00E+06
6,00E+06
8,00E+06
1,00E+07
1,20E+07
1,40E+07
0 100 200 300 400 500 600
Vo
n m
ise
s (N
/m2)
jarak (mm)
Torsi:
250 Nm
280 Nm
300 Nm
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 100 200 300 400 500 600
Dis
pla
cem
ent
(mm
)
jarak (mm)
Torsi:250 Nm
280 Nm
300 Nm
16
Gambar 22.Grafik perbandingan displacement yang terjadi pada setiap 50 mm pada cv joint part
2 dengan beban torsi 250 Nm, 280 Nm, dan 300 Nm clamp diekor cv joint.
Perbandingan grafik hasil simulasi menunjukkan von mises dan displacement yang terjadi
semakin besar seiring dengan semakin besar beban yang diberikan. Seperti contohnya pada
gambar 19 dan gambar 20 sangat jelas terlihat perbedaan besar tegangan von mises yang terjadi
antara beban 250 Nm, 280 Nm, dan 300 Nm dimana garis silver yaitu von mises dari beban 300
Nm jauh lebih tinggi dari garis lainnya. Adapun perbedaan displacement juga menunjukkan
bahwa beban 300 Nm menyebabkan displacement yang lebih tinggi dari beban 250 Nm dan 280
Nm. Terdapat tegangan von mises yang terjadi lebih tinggi dari yield strength yaitu pada titik
dimana sumber beban berasal. Jadi hasil tersebut bias diabaikan dan dapat dikatakan bahwa
berdasarkan analisis von mises dengan beban250 Nm, 280 Nm, dan 300 Nm aman untuk
menggunakan cv joint part 2 dengan material baja (steel).
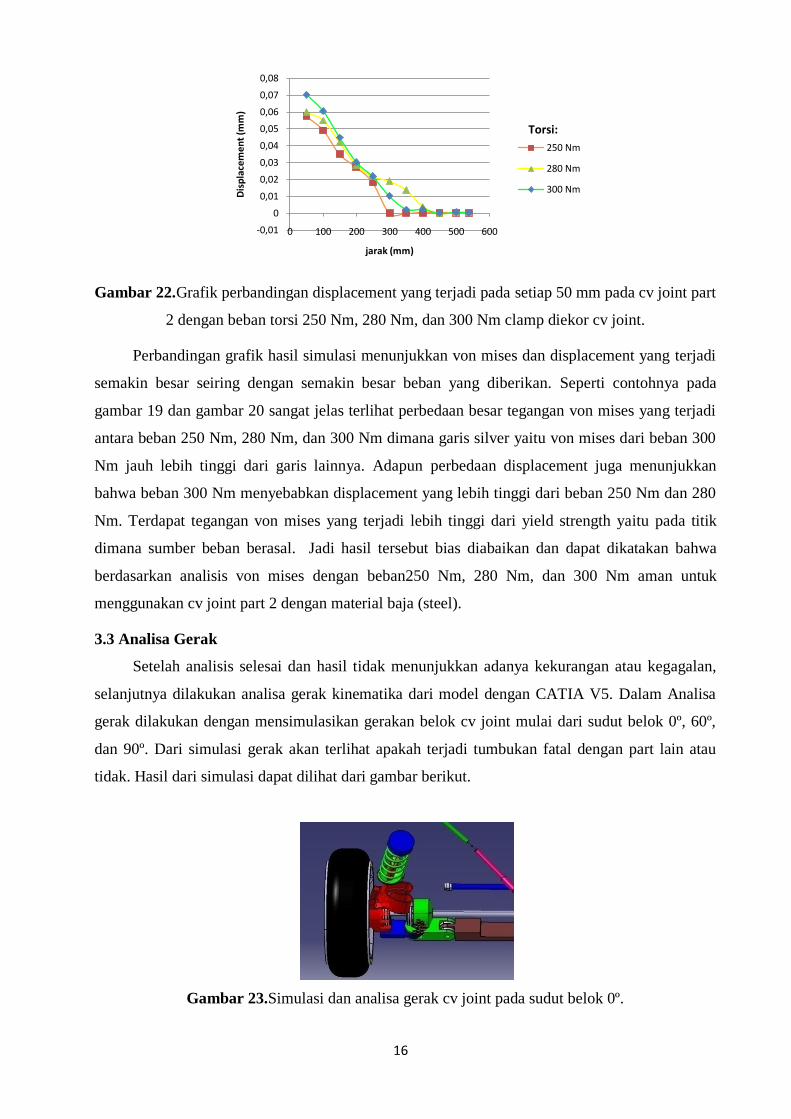
3.3 Analisa Gerak
Setelah analisis selesai dan hasil tidak menunjukkan adanya kekurangan atau kegagalan,
selanjutnya dilakukan analisa gerak kinematika dari model dengan CATIA V5. Dalam Analisa
gerak dilakukan dengan mensimulasikan gerakan belok cv joint mulai dari sudut belok 0º, 60º,
dan 90º. Dari simulasi gerak akan terlihat apakah terjadi tumbukan fatal dengan part lain atau
tidak. Hasil dari simulasi dapat dilihat dari gambar berikut.
Gambar 23.Simulasi dan analisa gerak cv joint pada sudut belok 0º.
-0,01
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0 100 200 300 400 500 600D
isp
lace
men
t (m
m)
jarak (mm)
Torsi:
250 Nm
280 Nm
300 Nm

17
Gambar 24.Simulasi dan analisa gerak cv joint belok ke kanan pada sudut belok 60º (kiri) dan
90º (kanan).
Saat dilakukan simulasi gerak berbelok ke kanan dari sudut belok 0º, 60º, hingga 90º, tidak
terlihat atau tidak muncul adanya tumbukan cv joint dengan part lain. Hanya terdapat sedikit
gesekan yang tidak signifikan pada cv joint yang disebabkan oleh adanya beban torsional dari
kendaraan. Begitu juga dengan hasil simulasi gerak untuk gerakan belok ke kiri dengan sudut
belok 0º, 60º, hingga 90º juga.
Gambar 25.Simulasi dan analisa gerak cv joint belok ke kiri pada sudut belok 60º (kiri) dan 90º
(kanan).
3.4 Pembuatan Prototipe
Pembuatan prototipe merupakan hasil akhir dari penelitian dan dilakukan setelah Analisa
konstruksi/material yang digunakan dan simulasi dari assembly memenuhi syarat serta tidak
menunjukkan kegagalan. Prototipe ini dibuat sebagai tanda keberhasilan dari penelitian sekaligus
dapat digunakan untuk penelitian selanjutnya. Selain itu prototipe juga digunakan atau
difungsikan untuk alat peraga. Berikut beberapa gambar prototipe yang telah dibuat dan
diperagakan sudut beloknya.

18
Gambar 24. Peragaan dengan prrototipe gerak cv joint belok pada sudut belok 90º berbelok ke
kiri (kiri) dan berbelok ke kanan (kanan).
4. PENUTUP
Dari penelitian ini dapat ditarik beberapa kesimpulan dan saran hasil analisa material yang
digunakan untuk cv joint kendaraan 4WS yang rata-rata mempunyai torsi sekitar 250 Nm, 280
Nm, dan 300 Nm menunjukkan bahwa semakin besar torsi yang dipakai pada kendaraan maka
tegangan von mises dan displacement yang terjadi pada cv jointnya juga akan semakin besar.
Namun selama tegangan von mises yang terjadi tidak melebihi yield stress material baja yaitu
2,5e+008 N/m2
maka cv joint berbahan material baja masih aman untuk digunakan. Saran untuk
penelitian kedepan adalah dapat dilakukan penelitian dengan cv joint yang berbahan material
selain baja serta dengan variasi torsi yang lebih besar.
Hasil simulasi dan analisa gerak pada CATIA V5 memperlihatkan tidak adanya tumbukan
yang signifikan terhadap komponen selain cv joint, hanya terjadi gesekan pada bearing cv joint
yang berputar karena adanya beban berputar atau bebam torsional yang berasal dari kendaraan.
Untuk saran penelitian kedepan pada simulasi gerak lebih mendetail seperti adanya pengaruh
gerakan dari komponen lain atau beban yang disebabkan dari komponen lain.
Prototipe juga sudah berhasil dibuat sesuai hasil simulasi dan analisis. Saran untuk
penelitian selanjutnya agar supaya bisa dibuat prototipe lebih lengkap dengan komponen lain.
DAFTAR PUSTAKA
Bodson, M. (2002). “Evaluation Of Optimization Methods For Control Allocation”. Journal of
Guidance, Control, and Dynamics, 25 (4), 703–711
Durham, W. C. (1993). “Constrained control allocation”. Journal of Guidance, Control, and
Dynamics, 16 (4), 717–725
Fredriksson, J., Andreasson, J., & Laine, L. (2004). “Wheel force distribution for improved
handling in a hybrid electric vehicle using nonlinear control”. In Proceedings of the 43rd
IEEE conference on decision and control (pp. 4081–4086). Atlantis, USA, December.
Hendratno, Bayu. (1996). “Analisa Kestabilan Mobil Tenaga Surya Widya Wahana III ITS
Dengan Menggunakan Tiga Roda”, Jurusan Teknik Mesin FTI-ITS.
19
Hori, Y. (2004). “Future vehicle driven by electricity and control research on four wheel
motored „UOT MarchII‟”. IEEE Transactions on Industrial Electronics, 51 (5), 954–962.
I.N.Sutantra, & Yusuf Kaelani. (2000). “Dinamic Characteristics of Multi Function Four Wheel
Steering System”, FISITA World Automotive Congress, Seoul, Korea, June, 2000,
F2000G344.
Jonoadji, Ninuk and et. Al. (2008). ”Analisa Kinematika Gerakan Belok Akibat Pengaruh
dynamic Center of Gravity (CoG) dan Panjang Wheelbase (L) Menentukan Sudut Side Slip
dan Hubungannya terhadap Stabilitas Kendaraan”, Prosiding SNTMI 4, Universitas
Tarumanagara Jakarta.
Krisnawan, I Gede Ngurah. (1988). “Korelasi Sudut Streer Depan dan Belakang dengan Control
Side Slip Angle Guna Meningkatkan Stabilitas Arah Kendaraan”, Jurusan Teknik Mesin
FTI-ITS.
Lakad, Sailesh. (2004). “Modelling and Simulation of Steering System for Autonomous Vehicle”,
Florida State College.
Lazic, Nenand. (2002). “Optimal Vehicle Dinamics-Yaw Rate and Side Slip Angle Control Using
4 Wheel Steering”, Dep. Of Automatic Control, Lund Institute of Technology.
Lee A.Y. (1995). “Perfomance of Four Wheel SteeringVehicle In Line Change Maneuver”, SAE
950316.
Li, G., Hong, W., &Liang, H. (2012). “Four-wheel independently driven in-wheel motors
electric vehicle AFS and DYC integrated control”. In SAE paper 2012-01-0258.
Mokhiamar, O., & Abe, M. (2005). “Experimental verification using a driving simulator of the
effect of simultaneous optimal distribution of tyre forces for active vehicle handling
control”. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of
Automobile Engineering, 219(2), 135–149.
Nagai, M., Shino, M., & Gao, F. (2002). “Study on integrated control of active front steer angle
and direct yaw moment”. JSAE Review, 23(3), 309–315.
Nurdhiyanto, Irvan. (1992), “Perencanaan Sistem Elektronika Sebagai Pengatur Gerakan
System Kemudi Empat Roda”. Jurusan Teknik Mesin FTI-ITS.
P Brabec, M Maly, &R Vozenilek,. (2004).”Controls System of Vehicle model with 4WS”.
International Scientific Meeting Motor Vehicles and Engine, Kragujevac.
P. Raksincharoensak, Hiroshi Mouri, MasaoNagai. (2002).“Vehicle Lane Keeping Control by
Four Wheel Steering System”. Proceeding, 6th Int.Symp. on Advanced Vehicle Control
(AVEC –2002), Hirosima, Japan, Sept. 9–13, 2002.
P. Raksincharoensak, Hiroshi Mouri, Masao Nagai. (2004). “Evaluation of Four Wheel steering
system from The viewpoint of lane-Keeping control”. International-Journal of Automotive
Technology Vol 5 No 2.
Prucker, Alfred, Fischer, Sven. (2000).“Vehicle Dynamics Control for a 4WS Prototipe Car”.
15th
ADAM user Conference 2000.
Rajamani, R. (2006). “Vehicle dynamics and control”. NewYork: Springer-Verlag.
20
Sadewa, Arya Tjandra. (1999). “Perancangan Sistem Elektronik Sebagai Unit kontrol stabilitas
kendaraan dengan system kemudi empat roda (4WS)”. Jurusan Teknik Mesin FTI-ITS.
Setiawan Ananto (1990).“Modifikasi Sistem Kemudi 4 Roda Dahiatsu Charade CX-88”. Tugas
Akhir S-1, Jurusan Teknik Mesin ITS, Surabaya.
Shinya Nohtomi, Yoshihiro Shimada, Shinichiro Horiuchi and Naohiro Yuhara. (1997).“Multi
Criteria Design of Adaptive Front and Rear Wheel Steering Control System with Special
Emphasison Yaw Rate Response”. Int. Pasific Conferenceon Automotive Engineering (IPC
– 9), Bali, Indonesia, Nov. 16 – 21, 1997.
Siahaan, Ian Hardianto. ”Penentuan Region Skid-Non Skid (2WS) Type Model Kendaraan Rear
Wheel Drive (RWD)”. Prosiding SNTMI 4, Universitas Tarumanagara Jakarta.
Sjahmanto, Mohammad. (1999). “Pengaruh Parameter Operasi Terhadap Sudut Ster Belakang
System Kemudi Empat Roda (4WS) Pada Kecepatan Rendah”. Jurusan Teknik Mesin FTI
ITS.
Sjahmanto, M. (2001). “Pengaruh Parameter Deasin dan Parameter Operasi terhadap δr sistem
4-WS pada Kecepatan Rendah”. Jurusan Teknik Mesin FTI-ITS.
Tahzir, Ahmad. (1999). “Perangkat Lunak Analisa Stabilitas Kendaraan System Kemudi 4
Roda”. Jurusan Teknik Mesin FTI-ITS.
Tjønnås, J., & Johansen, T. A. (2010). “Stabilization of automotive vehicles using active steering
and adaptive brake control allocation”. IEEE Transactions on Control Systems
Technology, 18 (3), 545–558.
T. Kohata, M. Abe, & N. Ukai. (1992).“Electronic Control Four Wheel Steering System”.
Proceeding of AVEC-Yokohama, Japan, pp.264-269.
Wang, J. (2007). “Coordinated and reconfigurable vehicle dynamics control”. Ph. D.
dissertation. Austin, TX, USA: Department of Mechanical Engineering. The University of
Texas at Austin.
W. Diyono, & Sutantra (1994). “Rancang Bangun Sistem Kemudi 4 Roda Electric–Mekanis (M-
ITS-4WSII)”. Laporan Proyek Penelitian, Jurusan Teknik Mesin ITS, Surabaya.
Yunarko. T. (1999). “Pengaruh Parameter Disain Terhadap Kebutuhan Sudut Belok Roda
Belakang pada Sistim Kemudi Empat Roda untuk Kecepatan Tinggi”. Thesis S-2, Prog.
Studi Teknik Mesin, ITS – Surabaya.