penggunaan filter robust multifikatif regulasi pada data...
TRANSCRIPT

Penggunaan Filter Robust Multifikatif Regulasi Pada Data Very Low Frequency
Elektromagnetik (VLF-EM)
Ahmad Zikri
1109 100 702
Pembimbing :
Prof. Dr. rer. Nat Bagus Jaya Santosa, S.U
Dr. Dwa Desa Warnana
Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Teknologi Sepuluh Nopember
Surabaya 2013

Latar Belakang
1. Metode VLF-EM dapat mendeteksi zona konduktivitas (Santos, 2006) serta deliniasi air bawah tanah dan zona patahan (Sharma, 2005).
(Setiadi, 2009)
2. Terdapatnya noise dan outlier dari hasil pengukuran VLF-EM (Abbas, 2012)
3. Parameter smoothing (s) pada filter robust yang dibuat oleh Garcia (2010) dapat mengontrol RSS.

Perumusan Masalah
1. Bagaimana mengembangkan filter robust multifikatif regulasi,
2. Bagaimana proses filter data VLF-EM,
3. Bagaimana mengalisa anomali yang dihasilkan, dan
4. Bagaimana mengeinterpretasi hasil anomali data VLF-EM
Batasan Masalah
• Hanya pada penggunaan data VLF-EM dengan metode filter robust.
• Pada pengolahan data, hanya digunakan perangkat lunak seperti : Matlab R2009a, Inv2DVLF-EM-v1, PrepVLF-EM-v1, PrepVLF-Frow-v1, Surfer 9
Tujuan Penelitian
1. Mengembangkan filter robust
2. Mengfilter data VLF-EM
3. Menganalisa anomali yang tampak sebelum dan sesudah dilakukan filterisasi, dan
4. Menginterpretasi data lapangan VLF-EM untuk menentukan zona lemah.

Very Low Frequency Elektromagnetik (VLF-EM)
1. Memanfaatkan gelombang EM dari stasiun radio di seluruh dunia yang digunakan untuk komunikasi pada navigasi militer dan beroperasi pada frekuensi yang sangat rendah (15-30 KHz)
Prinsip VLF-EM
(Bosch, dkk 2001) dalam Khalil dan Santos (2010)

2. Gabungan medan EM primer dan medan EM sekunder menghasilkan resultan medan magnet polarisasi yang elips (Khalil dan Santos, 2010).
Prinsip VLF-EM
3. Sehingga parameter yang menarik dari resultan medan magnet terpolarisasi adalah :
a) Orientasi dari sudut eliptisitas (∝) yang dikenal Real atau Inphase
Karous dan Hjelt (1983) dalam Khalil dan Santos (2010)
b) Rasio antara polarisasi mayor dan minor (e)

Filter Karous-Hjelt Filter Karous-Hjelt menghasilkan rapat arus pada berbagai kedalaman, serta lokasi yang akan menimbullkan medan magnet pada pengukuran VLF-EM.
∆𝑍
2𝜋𝐼𝑎.
∆𝑥
2= −0.102𝐻−3 + 0.059𝐻−2 − 0.561𝐻−1 +
0.561𝐻+1 − 0.059𝐻+2 + 0.102𝐻+3 Z = Ketebalan, dengan Z = ∆𝑥 ∆𝑥 = Jarak antar titik data 𝐼𝑎 = Rapat arus 𝐻− = nilai parameter Inphase dan 𝐻+ = nilai parameter Quadrature
Filter robust multifikatif regulasi
• Efek outlier dan pengungkitan dapat diminimalkan dengan menetapkan pembobot yang lebih rendah dari nilai outlier dan pengungkitan pada proses iterasi. (Rousseeuw dan Leroy, 1987 dalam Garcia 2010)
Fungsi Pemboboit yang digunakan adalah :
𝑊𝑖 =1 −
𝑢𝑖
4.685
2 2
𝑗𝑖𝑘𝑎 𝑢𝑖
4.685< 1
0 𝑗𝑖𝑘𝑎 𝑢𝑖
4.685> 1
Dengan : 𝑊𝑖 = diagonal matriks pembobot 𝑢𝑖 = Sisa studentized yang
digunakan sebagai standar deviasi dan pengungkitan

Filter robust multifikatif regulasi
• 𝑢𝑖 = 𝑟𝑖 1.4826𝑀𝐴𝐷(𝑟) 1 −1+ 1+16𝛽
2 1+16𝛽
−1
• Dengan :
• 𝑟𝑖 = sisa dari hasil observasi
• 𝛽 = adaptif atau automatik parameter regulasi
Standar deviasi dan pengungkitan

Filter Robust (Garcia, 2010)
• = RSS (Residual Sum of Square)
= Matriks Smoothing
S = Pengontrol dari Smoothing

Rumus Filter Robust Multifikatif Regulasi
Sengaja dikosongkan
ALUR PENELITIAN DATA SINTETIK

ALUR PENELITIAN DATA LAPANGAN
Data Sintetik 2 Anomali
Hasil Filter robust multifikatif regulasi
Hasil Filter
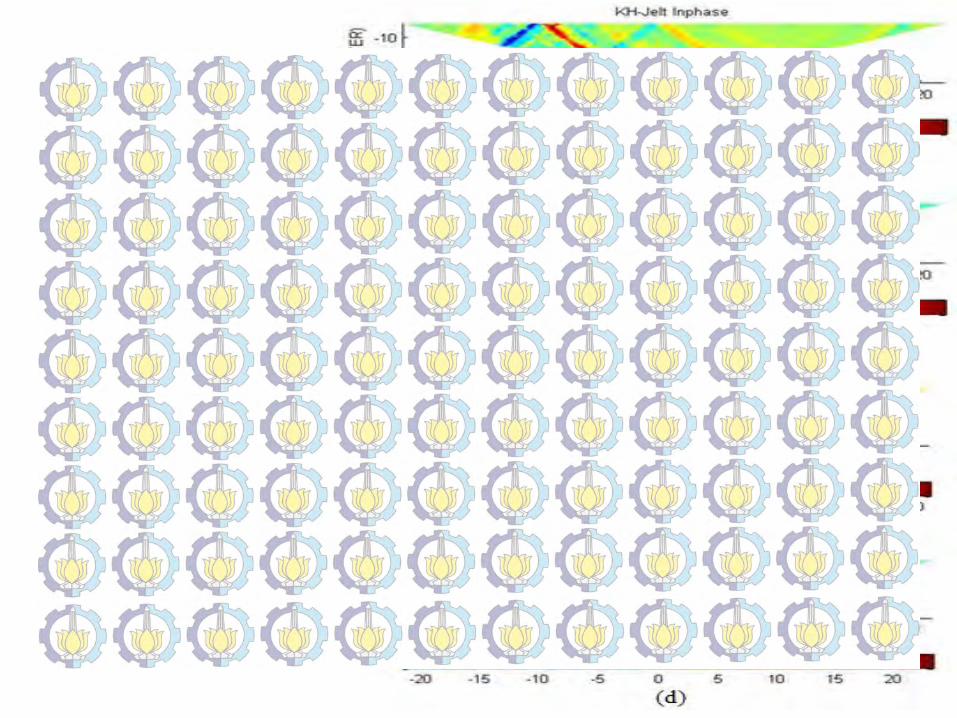
KH-Jelt
𝐼 𝐴 𝑚2
𝐼 𝐴 𝑚2

Data Sintetik 2 Anomali
Hasil Inversi
𝜌 (𝑜ℎ𝑚.𝑚)

Data Lapangan
Lintasan data
Lapangan di desa
Rembangan
Kec. Arjasa, Kab.
Jember
(Setiadi. 2009)

Lintasan 1
Hasil Filter robust multifikatif regulasi
Lintasan 1
Hasil Filter
KH-Jelt
1 • Filter Robust Multifikatif Regulasi dikembangkan dengan menurunkan data
smoothing, sehingga didapatkan autimatik parameter regulasi
2
• Data VLF-EM yang mengandung noise dan outlier dapat difilter dengan Filter Robust Multifikatif Regulasi sehingga pengungkitan pada titik sekitar noise dan outlier tidak mempengauhi model
3
• Analisa anomali sebelum difilter dengan filter robust multfikatif regulasi memperlihatkan banyak distribusi nilai rapat arus yang berbeda-beda disekitar anomali utama. Setelah difiltering, distribusi tersebut tidak terlihat kembali dan hanya rapat arus pada anomali pertama saja yang terlihat
4
• Hasil interpretasi menggunakan data lapangan VLF-EM memperlihatkan letak zona lemah pada :
• Lintasan 1 : (jarak : 40-65m kedalaman 25m, 85-155m kedalaman 35-55m) errorr 3.7
• Lintasan 2 : (jarak : 0-45m kedalaman 20-35m, 80-120m kedalaman 45m) error 4.5
• Lintasan 3 : (jarak : 0-100m kedalaman 20-5m, 100-210m kedalaman 5-55m) error 6.8
• Lintasan 4 : (jarak : 0-140m kedalaman 30-5m) error 5.
KESIMPULAN

SARAN
Dari hasil penulisan tugas akhir ini disarankan dilakukan proses gridding yang lebih teliti sehingga model inversi yang didapatkan memiliki error yang sangat kecil. Filter
robust multifikatif regulasi sabaiknya dibandingkan dengan filter robust lainnya. Ditampilkan bentuk 3D.
TERIMA KASIH