pemodelan sistem (lanjutan) - professional · sistem roda gigi (gears) dalam torsi dasar sistem...
TRANSCRIPT
Pemodelan Sistem
(Lanjutan)
Dasar Sistem Kontrol, Kuliah 3
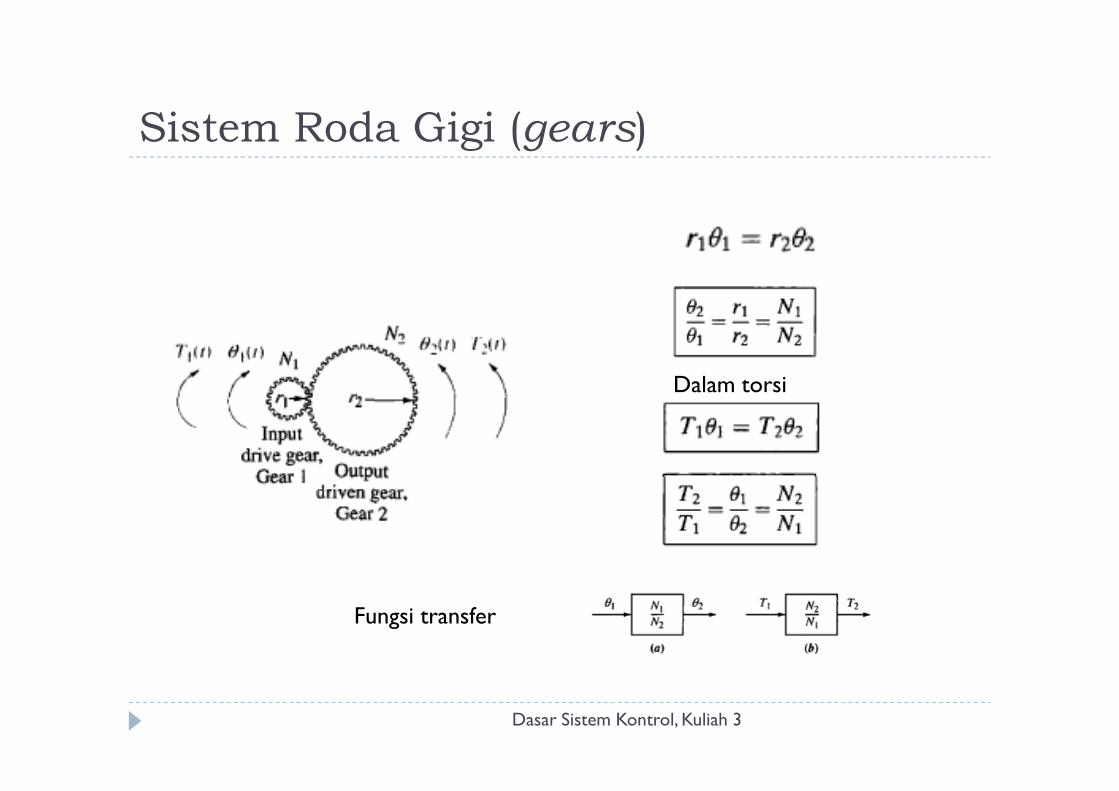
Sistem Roda Gigi (gears)
Dalam torsi
Dasar Sistem Kontrol, Kuliah 3
Dalam torsi
Fungsi transfer
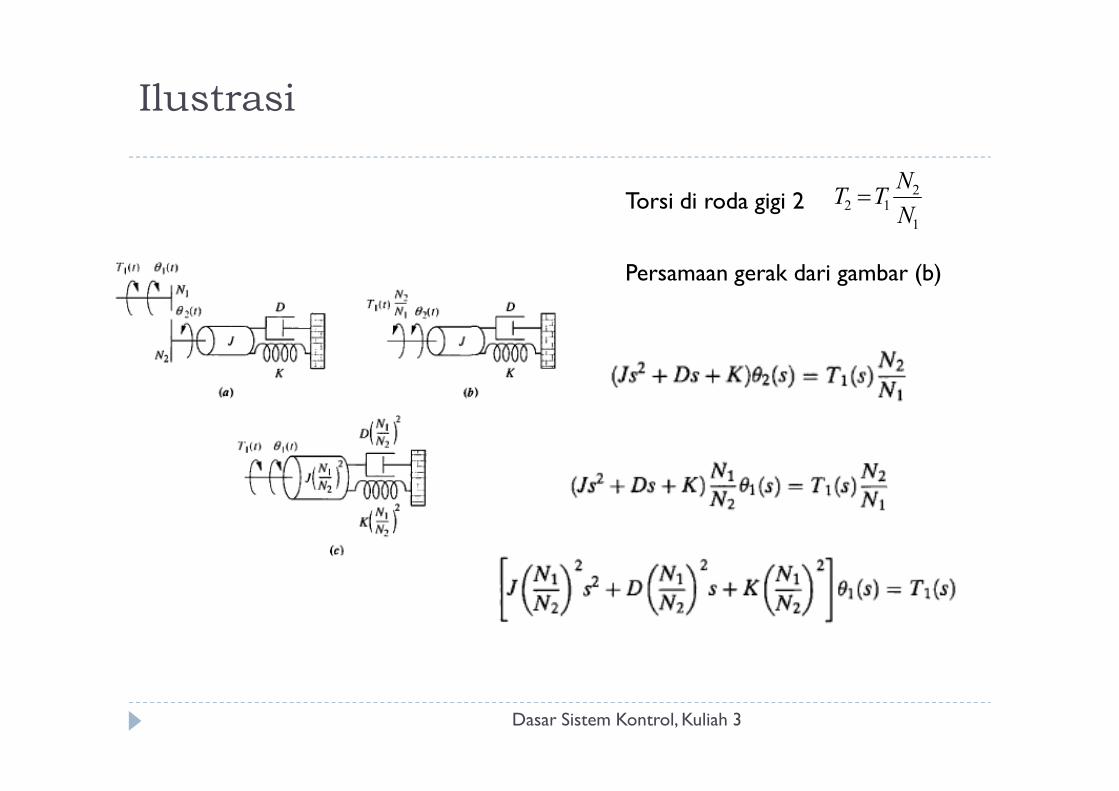
Ilustrasi
Torsi di roda gigi 21
2
12
N
NTT =
Persamaan gerak dari gambar (b)
Dasar Sistem Kontrol, Kuliah 3

Sistem Elektromekanikal
Motor DC
Dasar Sistem Kontrol, Kuliah 3
Model fisik dc motor (a) dan fungsi transfernya (b)Back emf
di mana
L Hukum Kirchoff tegangan (loop arus)
Torsi motor
Kt= konstanta torsi motor

DC motor (lanjutan)
SubtitusiVb dan Ia
Beban mekanik ekivalen pada motor dc
Dasar Sistem Kontrol, Kuliah 3
Jika diasumsikan La <<< Ra(tipikal motor dc)
Fungsi transfer
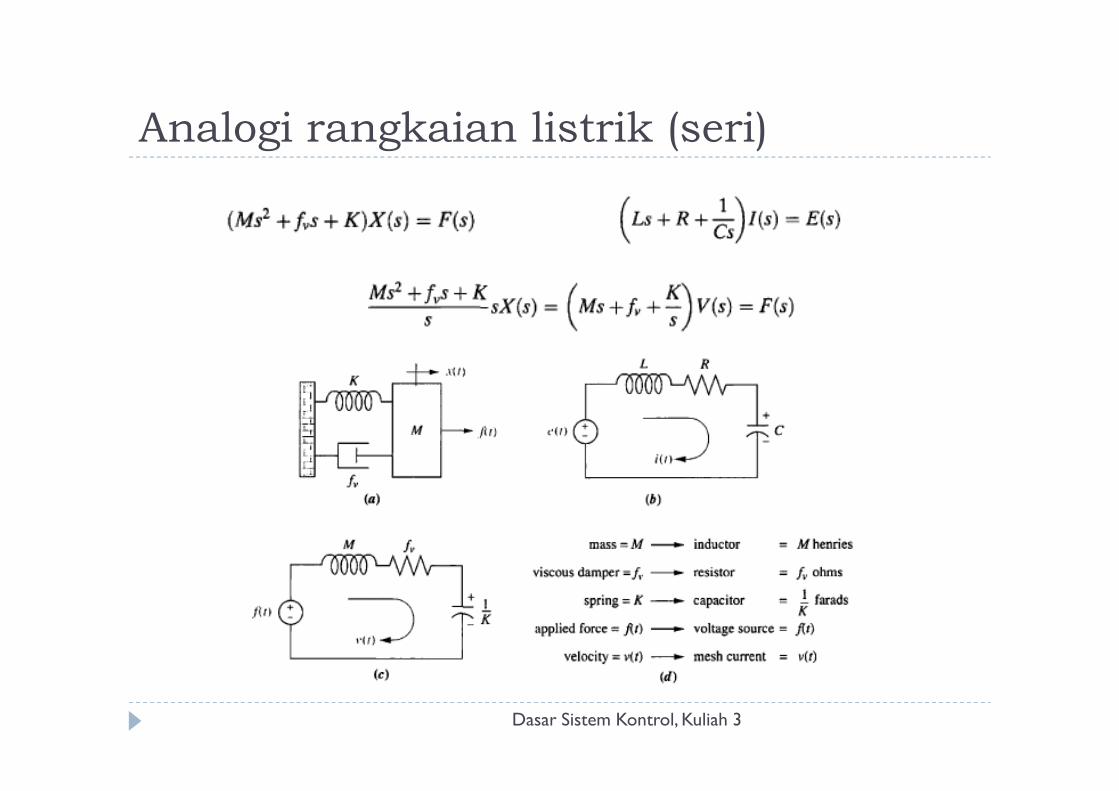
Analogi rangkaian listrik (seri)
Dasar Sistem Kontrol, Kuliah 3
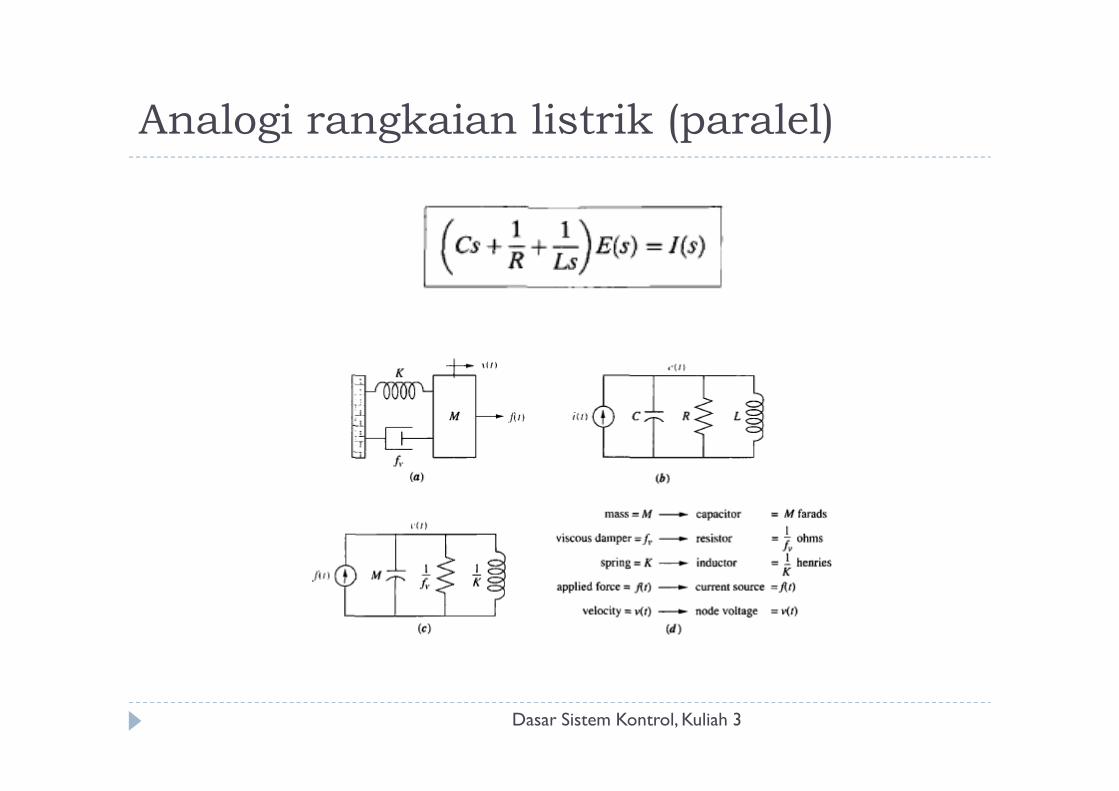
Analogi rangkaian listrik (paralel)
Dasar Sistem Kontrol, Kuliah 3
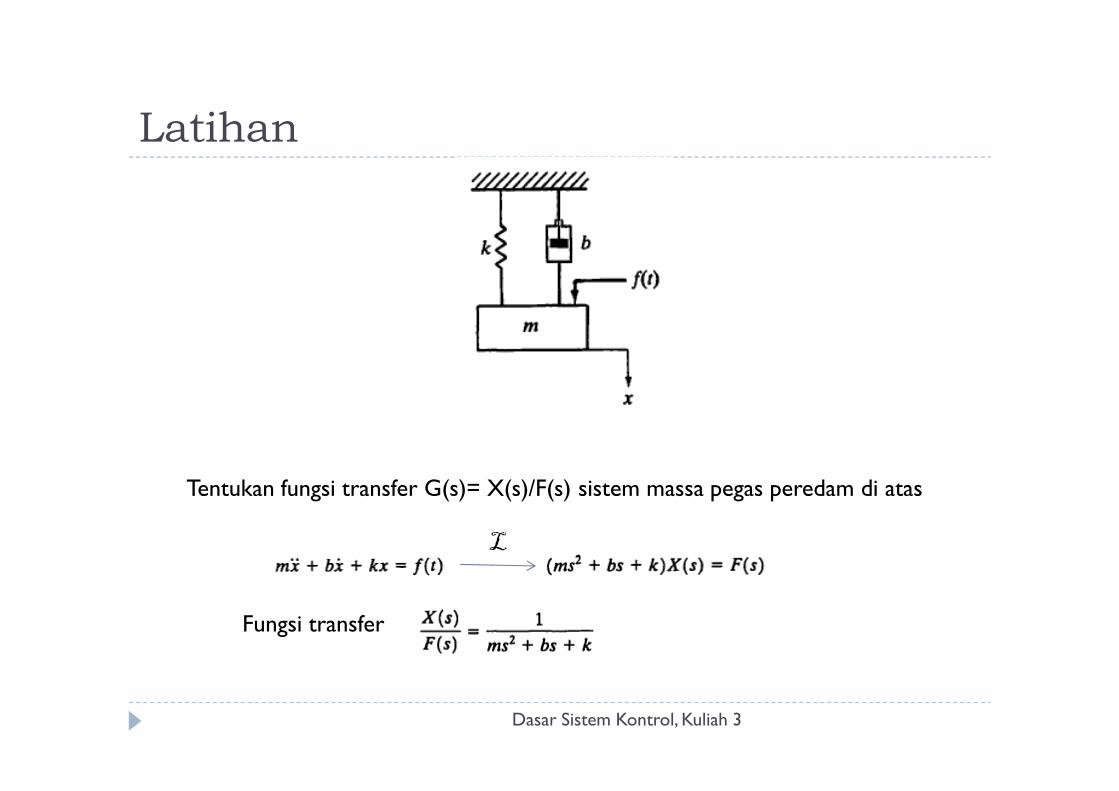
Latihan
Dasar Sistem Kontrol, Kuliah 3
Tentukan fungsi transfer G(s)= X(s)/F(s) sistem massa pegas peredam di atas
L
Fungsi transfer

Latihan
Tentukan fungsi transfer G(s)=X1(s)/F(s) dari sistem mekanikal translasi di bawah ini
Dasar Sistem Kontrol, Kuliah 3
Jika x2 adalah perpindahan pegas di sebelah kanan

Aplikasi Transformasi Laplace
Carilah fungsi y(t) dari persamaan diferensial di bawah ini jika semua kondisi awal nol
Dengan transformasi Laplace dan semua kondisi awal =0
Dasar Sistem Kontrol, Kuliah 3
Dengan inverse transformasi Laplace

Aplikasi Transformasi Laplace
Dengan cara sebelumnya diperoleh konstanta2
Dasar Sistem Kontrol, Kuliah 3
Dengan inverse transformasi Laplace
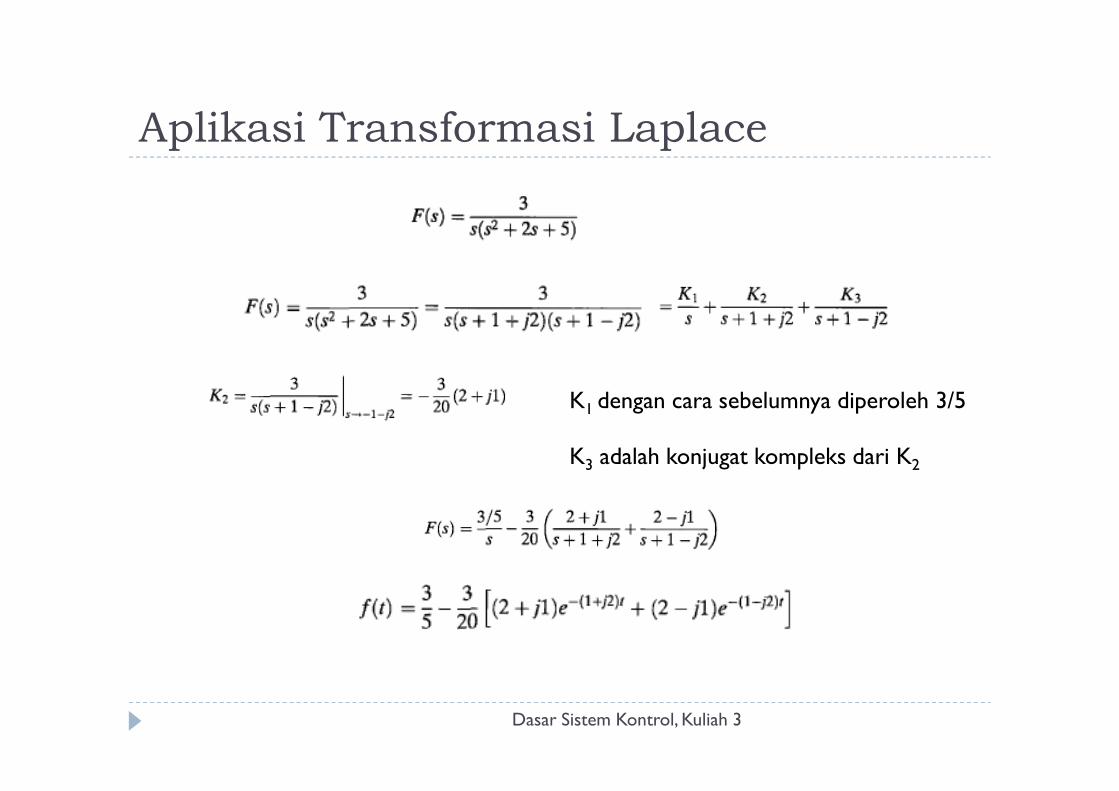
Aplikasi Transformasi Laplace
K dengan cara sebelumnya diperoleh 3/5
Dasar Sistem Kontrol, Kuliah 3
K1 dengan cara sebelumnya diperoleh 3/5
K3 adalah konjugat kompleks dari K2
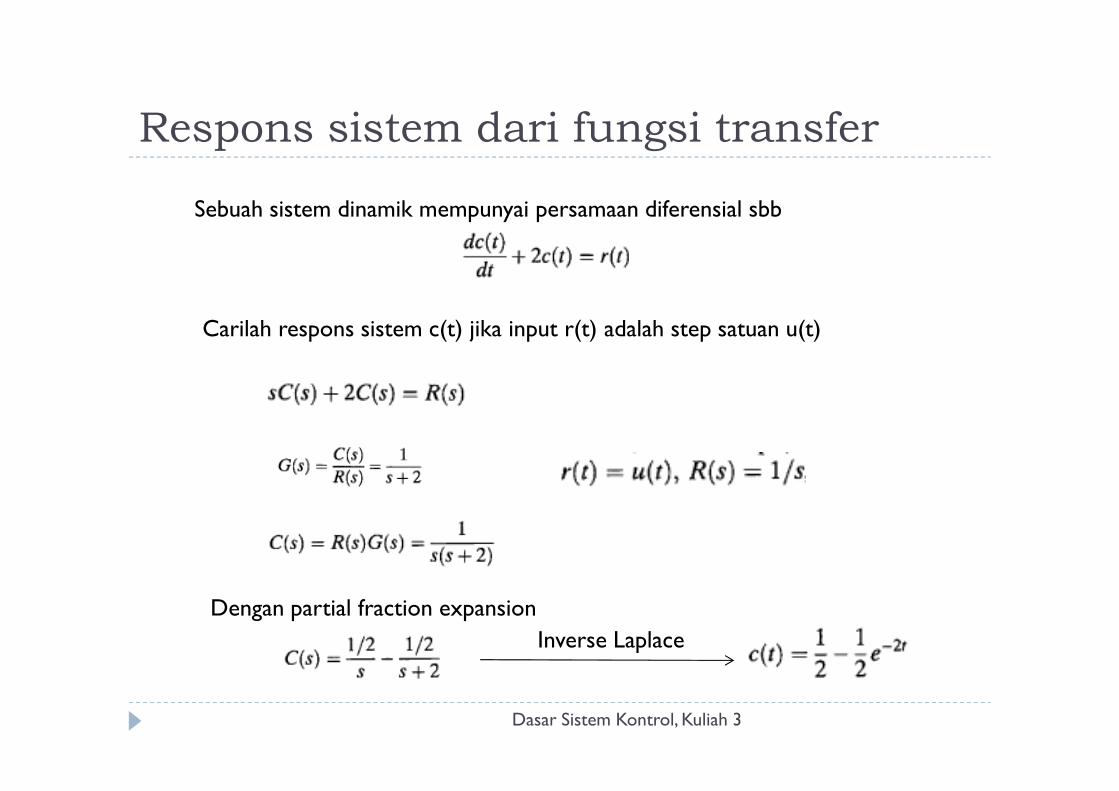
Respons sistem dari fungsi transfer
Sebuah sistem dinamik mempunyai persamaan diferensial sbb
Carilah respons sistem c(t) jika input r(t) adalah step satuan u(t)
Dasar Sistem Kontrol, Kuliah 3
Dengan partial fraction expansion
Inverse Laplace
Ramp Response
Tentukan ramp response dari sistem dengan fungsi transfer sbb:
Dasar Sistem Kontrol, Kuliah 3
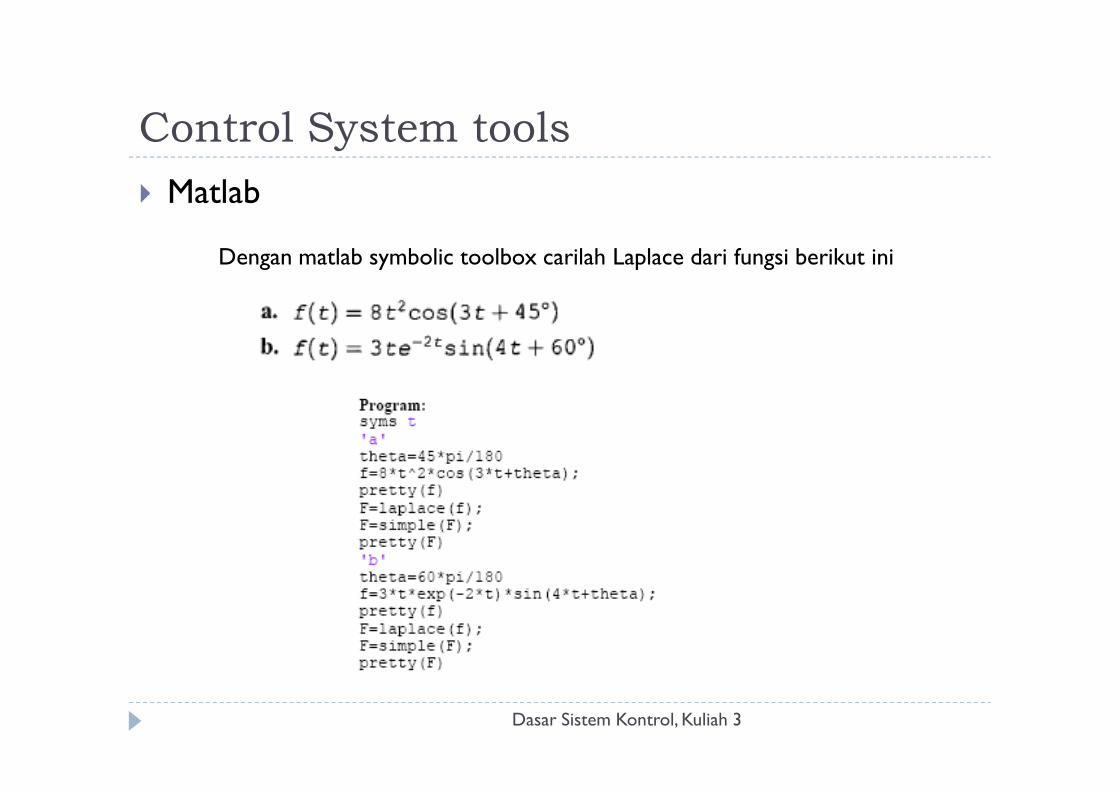
Control System tools
� Matlab
Dengan matlab symbolic toolbox carilah Laplace dari fungsi berikut ini
Dasar Sistem Kontrol, Kuliah 3
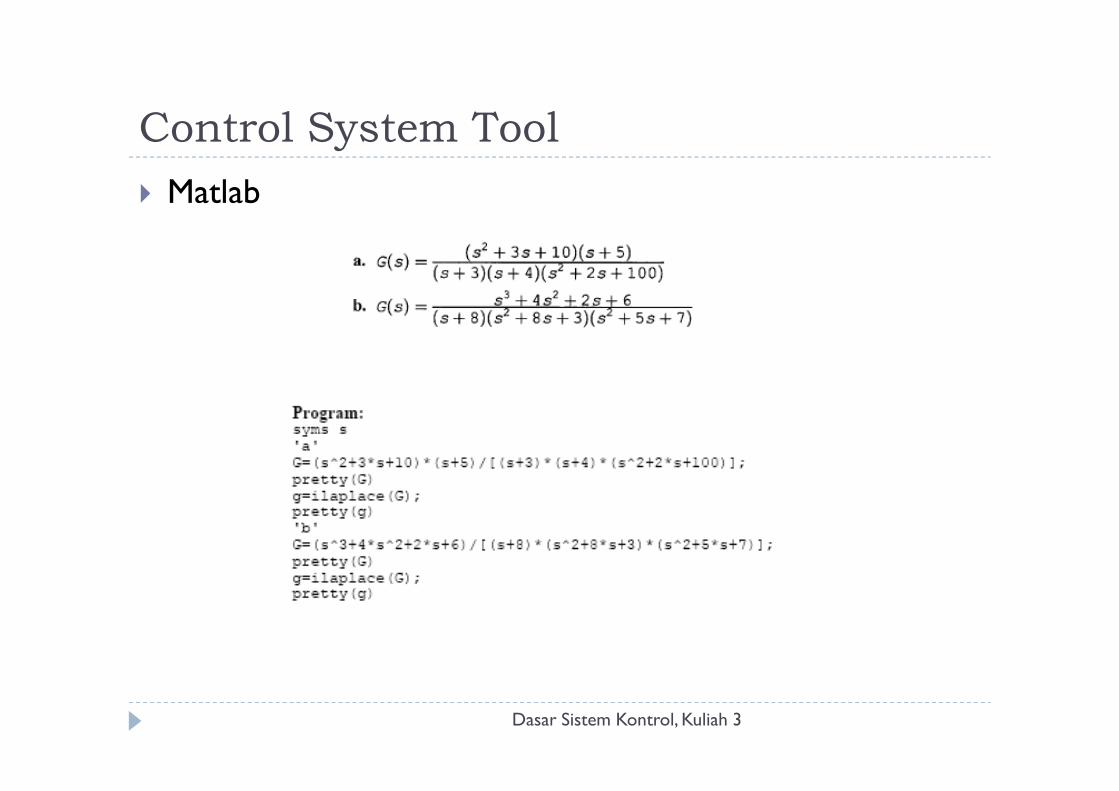
Control System Tool
� Matlab
Dasar Sistem Kontrol, Kuliah 3
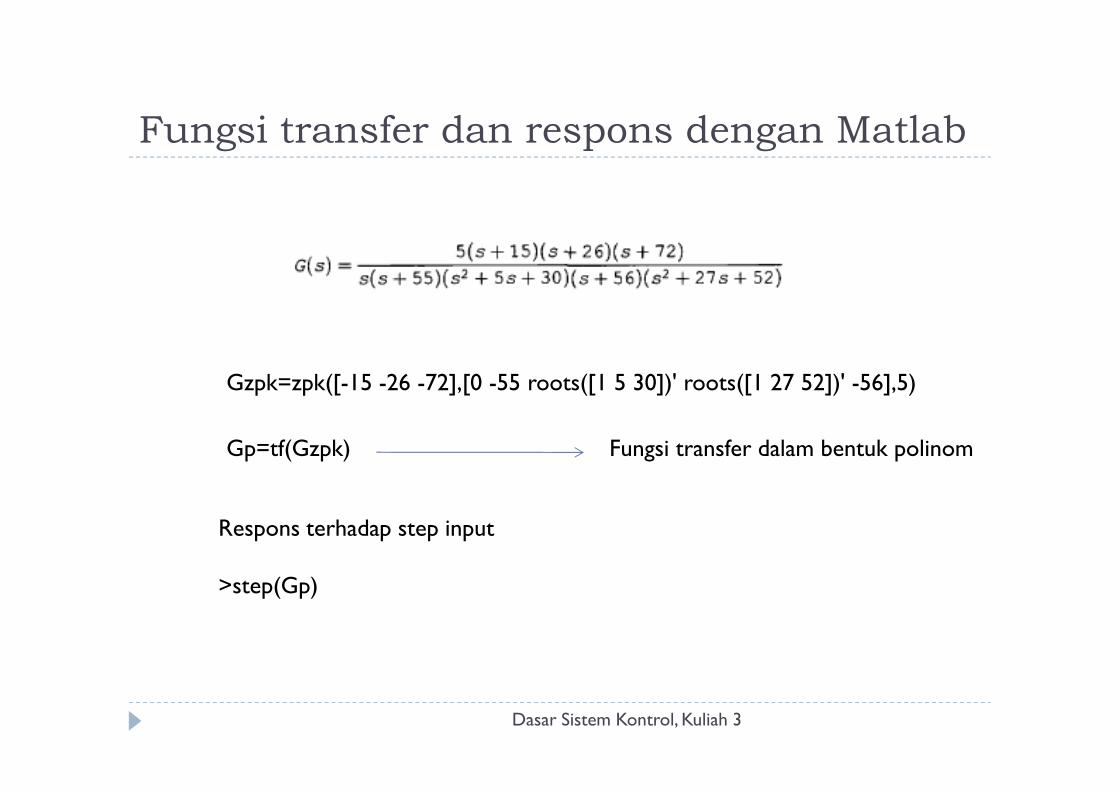
Fungsi transfer dan respons dengan Matlab
Gzpk=zpk([-15 -26 -72],[0 -55 roots([1 5 30])' roots([1 27 52])' -56],5)
Dasar Sistem Kontrol, Kuliah 3
Respons terhadap step input
>step(Gp)
Gp=tf(Gzpk) Fungsi transfer dalam bentuk polinom
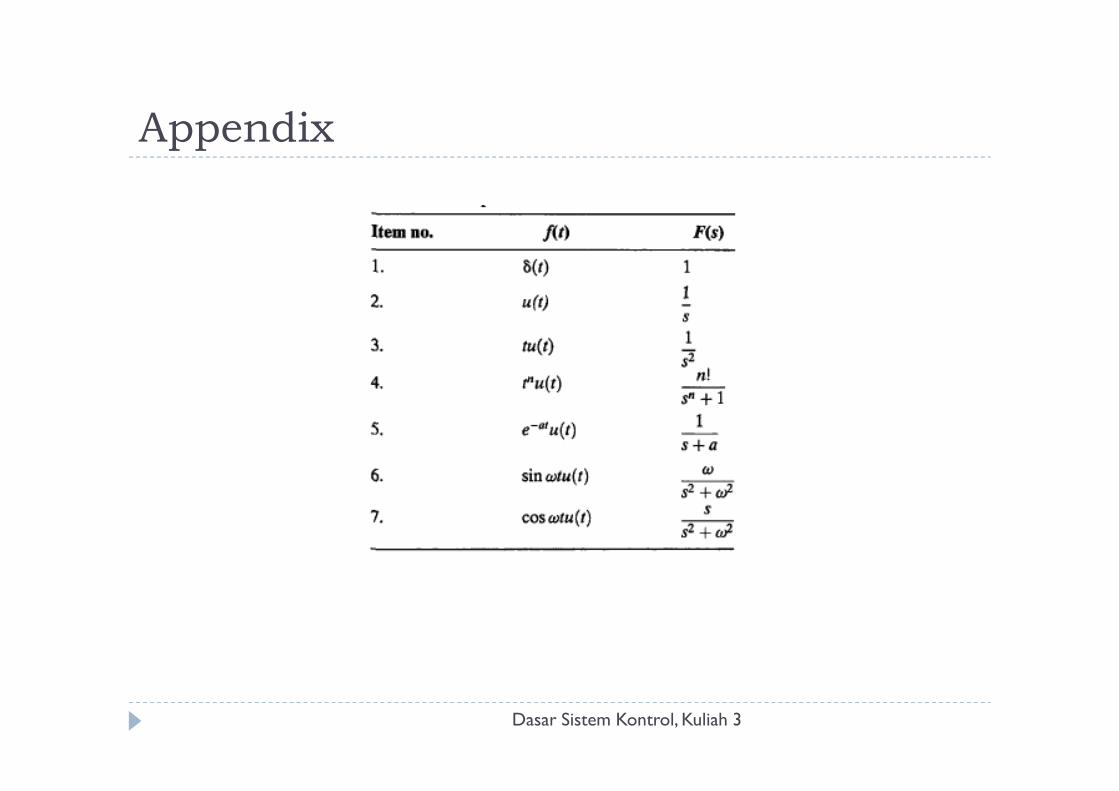
Appendix
Dasar Sistem Kontrol, Kuliah 3
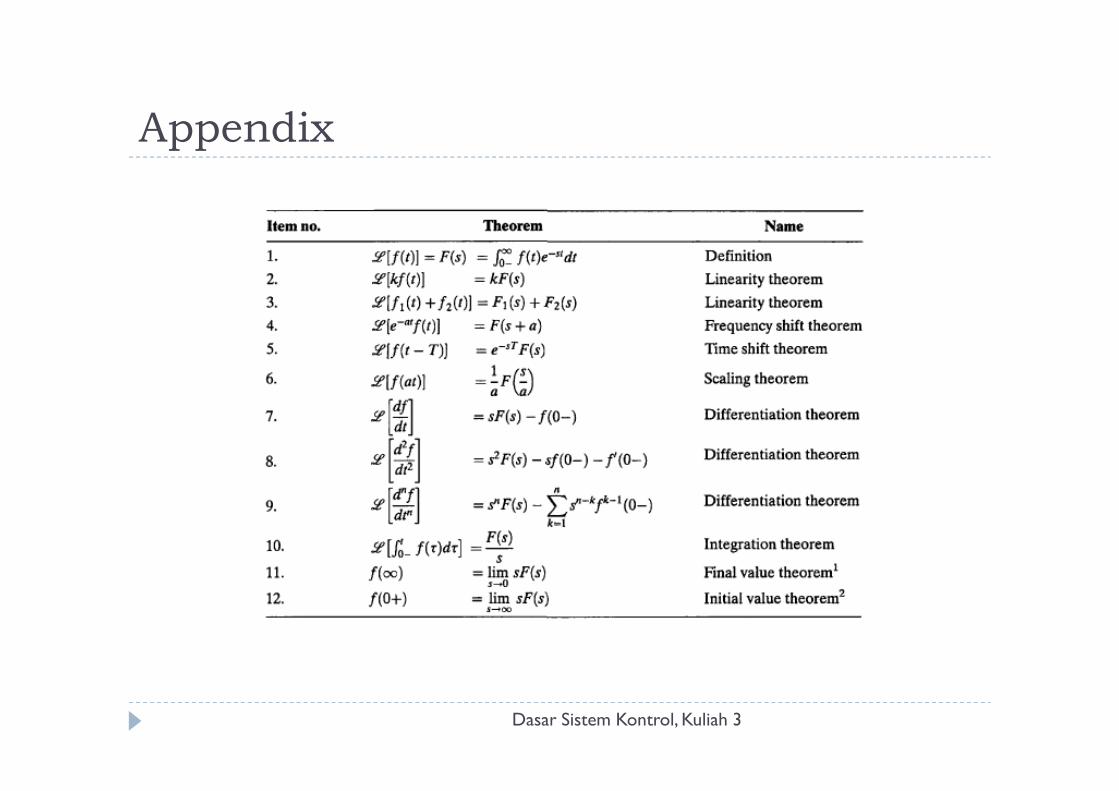
Appendix
Dasar Sistem Kontrol, Kuliah 3