pemodelan dan disain kontroler kaskade pendahuluan · pdf filesistem kontrol pneumatik...
TRANSCRIPT
ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2075
Pemodelan dan Disain Kontroler KaskadePada Sistem Pressure Process Trainer Feedback 38-714
Risfendra, Sukardi
Abstract
This articel aim to design cascade controller in pressurecontrol trainer, Feedback 38-714. The device has beenequipped with PID controller which is a single-loop controllerstructure applied widely in industry. The controller is easilyimplemented and relatively easy in tuning. However, in theother hand, it is unable to reduce load disturbance effect. Inprocess control system, load disturbance becomes a mainproblem. Cascade control can be used to overcome theproblem.
The design begin with plant identification to find themathematical model and calculate the controller parameter.The structure of controller is PI-PI cascade whole mostpopular cascade controller structure in process controlsystems.
The simulation result shown that design of closed-loopsystem with cascade PI-PI controller is better than single PIand single PID controller. This design have ability to reduceload disturbance until 99.99 %.
Key words : cascade control, load disturbance, pressurecontrol trainer.
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2076
PENDAHULUANSistem kontrol pneumatik bertekanan rendah secara luas
telah diterapkan pada teknologi sistem kontrol industri. Adapunalasan pemakaian yang luas ini termasuk antara lain sifat tahanledakan, kesederhanaan dan perawatan yang mudah [5].
Katup pneumatik banyak digunakan untuk pengaturan aliranfluida pada berbagai industri proses. Hal ini karena konstruksinyayang memungkinkan untuk melakukan aksi kontrol yang bagus. Katuppneumatik bekerja dengan mengatur tekanan sehingga dia dapatmelakukan aksi buka tutup.
Perkembangan teknologi sistem kontrol proses di industridewasa ini menuju penerapan teknologi elektro-pneumatik, yaitupengendalian sinyal dan komponen pneumatik melalui sinyal listrik.Dengan demikian pengendalian dapat dilakukan secara elektrikdengan bantuan rangkaian elektronik atau komputer.
Dalam sistem pengendalian proses, masalah gangguan bebanmenjadi perhatian utama, oleh sebab itu diperlukan suatu disainkontroler yang memiliki performansi bagus dan mampu mereduksipengaruh gangguan yang terjadi akibat perubahan beban. Strukturkontroler single loop, khususnya PID, telah menjadi standar otomasiindustri karena kelebihannya yang mudah diimplementasikan danrelatif mudah pula untuk ditala, namun di sisi lain tidak mampumengeliminasi pengaruh gangguan yang terdapat pada sistem proses.Struktur kontrol kaskade (Cascade control) sangat efektif dalammereduksi efek gangguan yang terjadi pada sistem proses [3]. Disamping itu kontrol kaskade juga memiliki kelebihan untukmeningkatkan respon sistem [7].
1. Pressure Control Trainer 38-714Procon 38 Series System adalah peralatan yang digunakan
untuk menunjukkan segala sesuatu tentang pengendalian proses. Padapanel depan trainer yang diperlihatkan pada Gambar 1, terdapatskema yang menunjukkan komponen-komponen utama beserta
ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2077
instalasinya dalam notasi pneumatik. Pada trainer terdapat pneumaticcontrol valve, orifice block, dan pressure tappings yang terhubungpada saluran pipa udara. Setelah melewati keseluruhan proses, aliranudara dapat dibuang langsung keluar atau ditampung ke air receiveryang terdapat pada bagian belakang trainer untuk pengamatan responproses yang lebih lambat. Pemasangan air receiver dapat dilakukansecara seri ataupun paralel.
Pengoperasian process control trainer 38-714 memerlukanbeberapa peralatan pendukung lainnya yaitu Process Interface 38-200,Process Controller 38-300, Pressure Transmitter 38-461, DifferentialPressure Transmitter 38-462, Digital Display Module 38-490 danCompressor Unit 38-820.
Katup pneumatik pada trainer dioperasikan dari current topressure converter (I/P) yaitu alat pengubah sinyal listrik menjadisinyal pneumatik. I/P Converter menerima sinyal kontrol sebesar 4-20 mA dari process interface 38-200 dan mengubahnya menjadisinyal pneumatik sebesar 3-15 psi.
Gambar 1. Bagian depan dari pressure control trainerFeedback 38-714 [1]
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2078
Berikutnya adalah sensor direct pressure untuk mengukurtekanan udara dan sensor differential pressure sebagai pengukur aliranudara (flow). Masing-masing sensor tersebut sudah dilengkapi denganrangkaian pengkondisi sinyal (signal conditioning 38-461 and 38-462)agar sesuai dengan tegangan dan arus kerja Process Interface 38-200.
2. Struktur Kontroler KaskadeKontroler kaskade (Cascade controler) merupakan teknik
kontrol yang sering digunakan pada pengendalian proses karenamemungkinkan untuk memperoleh performansi kontroler yang lebihbaik bila dibandingkan dengan kontroler tunggal (singlecontroller)[9]. Ada dua tujuan dari kontroler kaskade: (1) untukmengeliminasi pengaruh gangguan (2) meningkatkan ataumemperbaiki kedinamisan performansi control loop. [3]
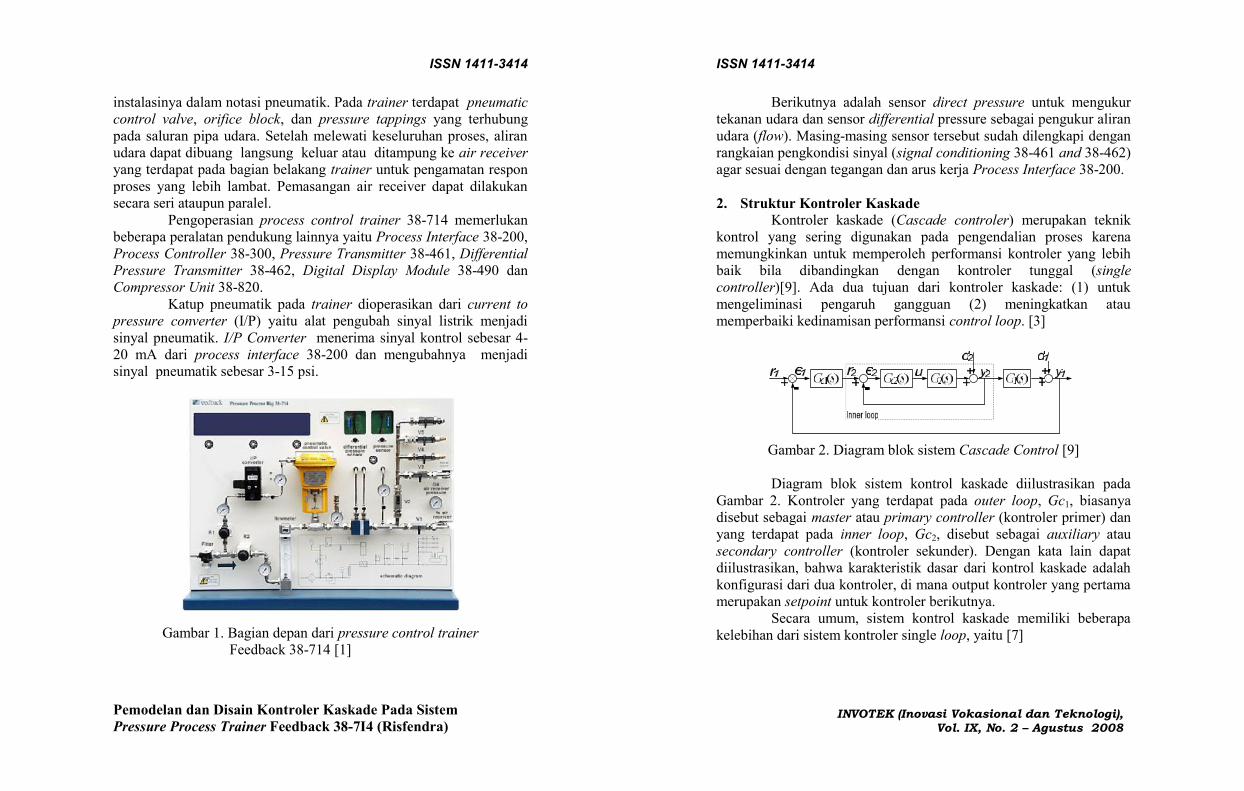
Gambar 2. Diagram blok sistem Cascade Control [9]
Diagram blok sistem kontrol kaskade diilustrasikan padaGambar 2. Kontroler yang terdapat pada outer loop, Gc1, biasanyadisebut sebagai master atau primary controller (kontroler primer) danyang terdapat pada inner loop, Gc2, disebut sebagai auxiliary atausecondary controller (kontroler sekunder). Dengan kata lain dapatdiilustrasikan, bahwa karakteristik dasar dari kontrol kaskade adalahkonfigurasi dari dua kontroler, di mana output kontroler yang pertamamerupakan setpoint untuk kontroler berikutnya.
Secara umum, sistem kontrol kaskade memiliki beberapakelebihan dari sistem kontroler single loop, yaitu [7]

ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2079
Gangguan yang terjadi pada inner loop dapat dikoreksi melaluiauxiliary controller sebelum berpengaruh terhadap variabel y1yang dikendalikan. Koreksi yang dilakukan akan menjadi lebihbaik apabila respon inner loop lebih cepat dari pada outer loop.
Kecepatan respon sistem dapat ditingkatkan apabila kecepatanrespon yang dihasilkan auxiliary control loop melebihi kecepatanrespon proses G2.
Karena keberadaan auxiliary feedback control, maka variasiparameter yang terjadi pada proses G2 dapat dikoreksi langsungpada inner loop tersebut.
Dari Gambar 1.2, fungsi alih dari inner loop, yangdinotasikan sebagai Gi, memiliki persamaan
22
22
2
2
1 GGcGGc
RY
Gi (1)
dengan demikian maka fungsi alih yang dimiliki sistem closed-looptersebut menjadi
212122
2121
112
112
1
1
1
1
GGGcGcGGcGGGcGcGGcG
GGcGRY
G p
(2)
Untuk sistem yang diberi gangguan, misalnya pada d2(gangguan pada inner loop), dan d1 = 0, maka fungsi alih keluaransistem adalah
212122
1
2
1
1 GGGcGcGGcG
DY
(3)
Jika umpan balik pada inner loop ditiadakan maka tentulah kontrolerGc2 tidak diperlukan, maka fungsi alih keluaran sistem menjadi
211
1
2
1
1 GGGcG
DY
(4)
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2080
terdapat perbedaan pada penyebut pers. (3) dan (4) yang merupakanpersamaan karakteristik masing-masing sistem. Hal ini berarti bahwaterdapat perbedaan respon terhadap gangguan antara sistem kontrolkaskade dengan sistem single loop.
IDENTIFIKASI MODELSecara umum sistem pengendalian kaskade untuk proses
tekanan ini dapat diilustrasikan pada Gambar 3. Sistem prosesdioperasikan menggunakan air receiver (V1, V2 dibuka dan V3ditutup) dengan beban nominal (V4 dibuka, V5 dibuka, V6 ditutup).respon sistem terhadap tekanan dikendalikan oleh kontroler primerdan keluarannya menjadi setpoint bagi kontroler sekunder yangmengendalikan respon sistem terhadap laju aliran, dengan demikianrespon sistem terhadap tekanan dinamakan sebagai plant primer danrespon sistem terhadap laju aliran dinamakan sebagai plant sekunder.
Gambar 3. Sistem pengendalian proses tekanan udara Feedback38-714 dengan kontroler kaskade
Kendala yang sering dijumpai dalam pembelian peralatandari luar negeri, baik untuk keperluan laboratorium maupun untukkeperluan industri adalah bahwa pihak vendor asing hanya

ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2081
menyertakan dokumen manual pemakaian alat, tidak disertai transferilmu yang dapat berupa model matematis peralatan dan cara menalaparameter pengendali untuk memenuhi target pengendalian yangdiinginkan [8]. Oleh sebab itu diperlukan identifikasi sistem untukmendapatkan model matematis dari plant.
Sebagaimana yang telah dibahas pada sub-bab 1.1, bahwaplant ini menggunakan katup pneumatik yang dioperasikan melaluicurrent to pressure converter (I/P). Dengan kata lain operasionalsistem ini berdasarkan sumber arus listrik (4-20 mA), sedangkanproses akusisi data memerlukan sumber tegangan listrik (0-5 V) agardapat dibaca komputer. Oleh sebab itu dalam proses identifikasi inidiperlukan pengubah arus ke tegangan dan sebaliknya (V/I dan I/Vconverter). Adapun konfigurasi fisik identifikasi sistem diilustrsikanpada Gambar 4.
Gambar 4. Konfigurasi fisik identifikasi sistem
3. Sinyal UjiProses identifikasi yang dilaksanakan adalah identifikasi
dinamis. Proses identifikasi ini memerlukan sinyal uji yang memilikispektrum frekuensi yang lebar. Oleh sebab itu digunakan sinyalpseudo random binary sequence (PRBS). Dengan demikian responkeluaran pressure process trainer dapat memberikan informasi yangcukup untuk menentukan model dari plant secara akurat. Padapenelitian ini dipilih sinyal PRBS 10 bit (01110111010), katupkontrol dioperasikan disekitar 50 persen dengan tegangan antara 3sampai 2 volt.
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2082
4. Struktur dan Estimasi Parameter ModelHasil identifikasi dinamis yang diperoleh berupa kumpulan
data keluaran tegangan sensor tekanan dan sensor laju aliran sepertiyang diperlihatkan pada Gambar 5.
Gambar 5. Hasil identifikasi dinamis
Data hubungan respon keluaran dan sinyal masukandigunakan dalam estimasi untuk mendapatkan model matematik plant.Adapun struktur model yang digunakan adalah struktur ARX, yaitustruktur model yang digunakan untuk menunjukan efek dari kontroldan disturbance pada output dari plant. ARX artinya proses AR denganexogenus (eksternal) input, dalam kasus ini u(t). Pembangkitan prosesARX diilustrasikan sebagai berikut :
n
ii tetyaty
1
)()1()( (5)
Persamaan tersebut dapat ditulis : A(Q-1)y(t)=e(t)

ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2083
Gambar 6. Pembangkitan Proses Random ARX [2]
Dengan
n
ii QaQA
1
11 1)( merupakan suatu polinominal sehingga
semua akar-akarnya yang terletak dalam unit circle (A(Z-1) =0→│Z│<1).Struktur model ARX dapat dijelaskan sebagai berikut:
)()()()()( tenktuQBtyQA (6)Model ARX diperoleh menggunakan estimasi dengan metode leastsquare, dengan
A(Q) = 1 + a1Q-1 + .... + anQ-n,dan
B(Q) = 1 + b1Q-1 + ... + bnQ-n.Sekumpulan model ARX dengan orde yang berbeda diestimasi untukmendapatkan model yang benar-benar mendekati respon keluaranplant.
Dengan bantuan matlab diperoleh model dengan norm errorterkecil untuk masing-masing model outer plant (tekanan) dan modelinner plant (laju aliran) adalah : Model outer plant :
11308.0)(1
s
sG
Model inner plant:
4.863112)( 22
ss
ssG
u(t) y(t))(
)(1
1
qAqBq d
E(t)
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2084
DISAIN KONTROLERKombinasi PI-PI merupakan kombinasi kontroler yang
sering digunakan, hal ini disebabkan karena kombinasi ini dapatmenjamin kondisi respon inner-loop lebih cepat dari respon outer-loop, di samping tetap menjaga agar keluaran masing-masing loopberada pada error steady state (ess) yang benar-benar mendekati nol.Adapun persamaan fungsi alih ideal untuk kedua kontroler tersebutadalah
sTiKpsGc
pp
11)(1
dan
sTiKpsGc
11)(2
di mana Kpp adalah proportional gain primer, Tip integral time primer,Kpq proportional gain sekunder, dan Tiq adalah integral timesekunder.
Penalaan parameter kontroler untuk sistem kaskade melaluidua tahap[4]: pertama, menala parameter kontroler sekunder (Gc2);selanjutnya, menala parameter kontroler primer (Gc1). Adapun metodapenalaan parameter kontroler yang digunakan adalah metoda stabilitymargin yang diperkenalkan oleh Zieglar and Nichols[6], dan untukmemperoleh nilai penguatan batas kestabilan digunakan metoda directsubstitutions.
Hasil penalaan paramater kontroler kaskade dan kontrolersingle-loop secara rinci dapat dilihat pada Tabel 1.
HASIL SIMULASIPerformansi hasil disain dilihat melalui simulasi, dengan
model matematik respon sistem terhadap tekanan (G1) sebagai plantprimer dan model matematik respon sistem terhadap laju aliran (G2)
ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2085
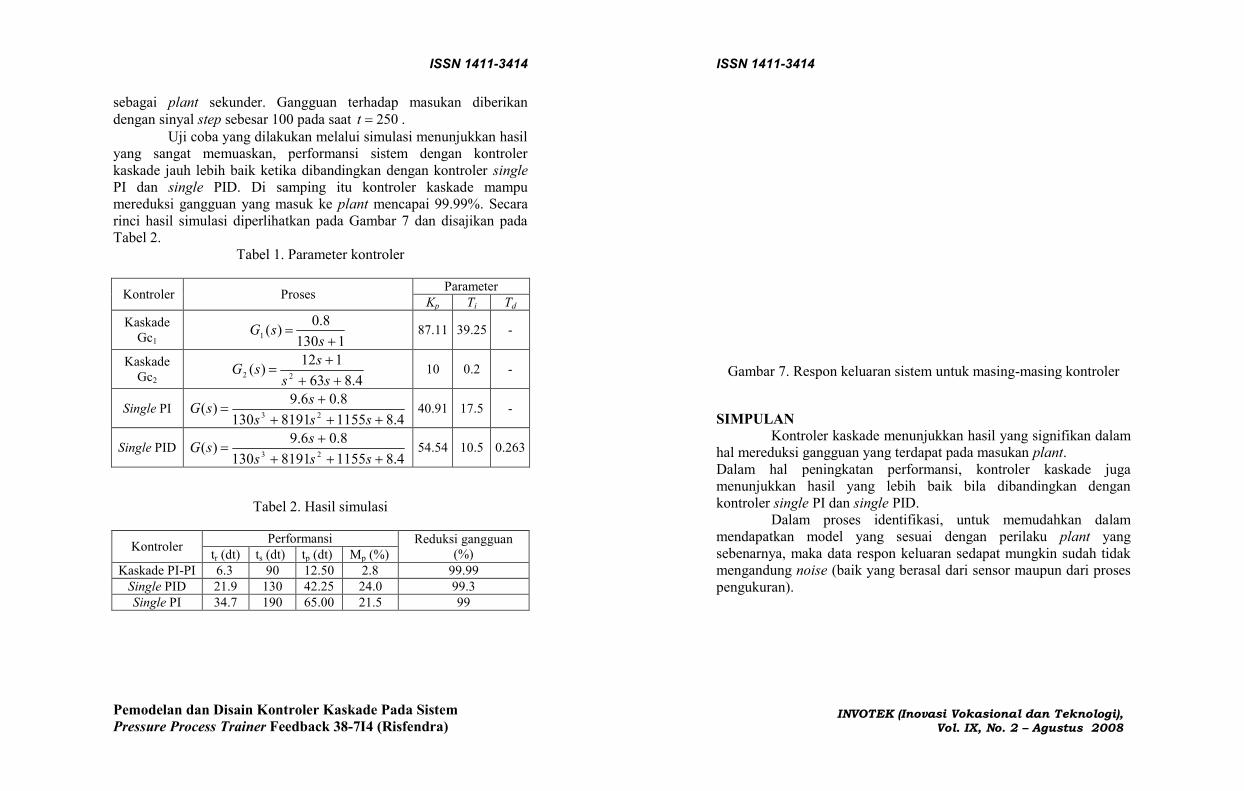
sebagai plant sekunder. Gangguan terhadap masukan diberikandengan sinyal step sebesar 100 pada saat 250t .
Uji coba yang dilakukan melalui simulasi menunjukkan hasilyang sangat memuaskan, performansi sistem dengan kontrolerkaskade jauh lebih baik ketika dibandingkan dengan kontroler singlePI dan single PID. Di samping itu kontroler kaskade mampumereduksi gangguan yang masuk ke plant mencapai 99.99%. Secararinci hasil simulasi diperlihatkan pada Gambar 7 dan disajikan padaTabel 2.
Tabel 1. Parameter kontroler
Kontroler Proses ParameterKp Ti Td
KaskadeGc1 1130
8.0)(1
ssG 87.11 39.25 -
KaskadeGc2 4.863
112)( 22
ss
ssG 10 0.2 -
Single PI4.811558191130
8.06.9)( 23
sss
ssG 40.91 17.5 -
Single PID4.811558191130
8.06.9)( 23
sss
ssG 54.54 10.5 0.263
Tabel 2. Hasil simulasi
Kontroler Performansi Reduksi gangguan(%)tr (dt) ts (dt) tp (dt) Mp (%)
Kaskade PI-PI 6.3 90 12.50 2.8 99.99Single PID 21.9 130 42.25 24.0 99.3Single PI 34.7 190 65.00 21.5 99
ISSN 1411-3414
INVOTEK (Inovasi Vokasional dan Teknologi),Vol. IX, No. 2 – Agustus 2008
2086
Gambar 7. Respon keluaran sistem untuk masing-masing kontroler
SIMPULANKontroler kaskade menunjukkan hasil yang signifikan dalam
hal mereduksi gangguan yang terdapat pada masukan plant.Dalam hal peningkatan performansi, kontroler kaskade jugamenunjukkan hasil yang lebih baik bila dibandingkan dengankontroler single PI dan single PID.
Dalam proses identifikasi, untuk memudahkan dalammendapatkan model yang sesuai dengan perilaku plant yangsebenarnya, maka data respon keluaran sedapat mungkin sudah tidakmengandung noise (baik yang berasal dari sensor maupun dari prosespengukuran).

ISSN 1411-3414
Pemodelan dan Disain Kontroler Kaskade Pada SistemPressure Process Trainer Feedback 38-7I4 (Risfendra)
2087
DAFTAR PUSTAKA
[1] Feedback instrument Ltd, (2003), PROCON Pressure ControlTrainer 38-714 Instruction Manual, Feedback instrument Ltd., UK
[2] Landu, Ioan Dore, (1990), System Identification and ControlDesign Using P.I.M + Software, Prentice Hall Inc.
[3] Luyben, William L., (1997), Essentials Process Control, McGraw-Hill, Singapore
[4] Marlin, Thomas E., (2000), Process Control: Designing Processand system for dynamic performance, 2nd edition, McGraw-Hill,Singapore.
[5] Ogata, Katsuhito, (1997), Modern Control Engineering, Prentice-Hall, New Jersey.
[6] Ogunneike, Babatunde A., (1994), Process Dynamic Modellingand Control, Oxford University press, New York.
[7] Shinskey, F.G., (1979), Process Control Systems-2nd ed, McGraw-Hill, New York
[8] Subiantoro, Aries, (2006), “Disain dan Implementasi PengendaliGPC Swa-tala Pada Sistem Pressure Process Rig”, Proceedings ofInternational Electronics Seminar, Politeknik Elektronika NegeriSurabaya-ITS
[9] Zhuang, M dan Atherton, D.P., (1994), Optimum Cascade PIDController Design For SISO System, IEEE Conference PublicationNo.389 21-24 March
Tentang PenulisPenulis adalah Dosen pada jurusan Teknik Elektro FT-UNPBidang Keahlian yang digeluti Penulis adalah Elektronika dan TeknikSistem Pengaturan. Penulis salah seorang anggota R&D pada LaborKontrol dan Instrumentasi Jurusan Teknik Elektro F-UNP.