m´etodo para o c´alculo das solucoes: atrav´es do uso de ...paginas.fe.up.pt/~mprocha/slc-cl/slc...
TRANSCRIPT

2. Modelos Lineares de Espaco de Estados
2.3 - Solucao das equacoes de espaco de estados, funcao de transferencia
e resposta ao impulso
Metodo para o calculo das solucoes: atraves do uso de transformadas de
Laplace
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Transformadas de Laplace
f : [0, +∞[ → R, f ∈ Eα, para algum α ∈ R, isto e:
• f e seccionalmente contınua no intervalo [0, +∞[
• f e de ordem de crescimento α-exponencial, i.e.,
∃M > 0 ∃t0 ≥ 0 |f(t)| ≤ Meαt ∀ t ≥ t0
Transformada de Laplace de f : L{f}(s) ou F (s)
L{f} : Df → C
s 7→ L{f}(s) =∫ +∞
0
e−stf(t)dt
onde Df = {s ∈ C : o integral∫ +∞0
e−stf(t)dt converge}
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Exemplo:
f(t) = eat −→ L{f} = F (s) = ?
F (s) =∫ ∞0
eat e−stdt =∫ ∞0
e−(s−a)tdt
= − 1s−a
e−(s−a)t]+∞
0= 1
s−a
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
• O domınio de convergencia do integral∫ +∞0
e−stf(t)dt contem um
semi-plano direito, no plano complexo.
Mais concretamente:
Proposicao: Usando a notacao anteriormente introduzida, se f ∈ Eα
entao
Cα := {s ∈ C : Re(s) > α} ⊆ Df .
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Propriedades das transformadas de Laplace
1. Sejam f1 ∈ Eα1 , f2 ∈ Eα2 , a1, a2 ∈ R, entao
• a1f1 + a2f2 ∈ Eα, α = max{α1, α2};
• L{a1f1 + a2f2} = a1L{f1} + a2L{f2}
2. Se f ∈ Eα e a ∈ R entao
(1) L{eatf(t)} = F (s − a),
para todo s ∈ C tal que Re(s − a) > α
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
3. Se f ∈ Eα e n ∈ N0 entao
L{tnf(t)} = (−1)n dn
d sn[F (s)],
4. Sejam f, f ′ ∈ Eα, sendo f ′ contınua para t ≥ 0, entao
L{f ′} = sF (s) − f(0)
5. Se f ∈ Eα, entao
L{∫ t
0
f(τ ) dτ
}=
1
sF (s)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Tabela
f(t) L{f}
1 1s
tn n!sn+1
eat 1s−a
sin at as2+a2
cos at ss2+a2
eatf(t) F (s − a)
f(t − a)u∗a(t) e−asF (s)
tnf(t) (−1)n dnF (s)dsn
n ∈ N0, a ∈ R, u∗a(t) - degrau unitario (= 1 t ≥ a)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
2. Modelos Lineares de Espaco de Estados
Transformada inversa
Uma transformada inversa de Laplace de uma funcao F (s), L−1{F (s)}, e
outra funcao f que goza da propriedade L{f} = F (s).
Teorema: Se L{f} ≡ L{g} e se f e g so contınuas em [0, +∞[,
entao f ≡ g.
Teorema: Se as transformadas inversas de Laplace de duas funcoes F1(s)
e F2(s) existem, entao para quaisquer constantes c1 e c2
L−1{c1F1(s) + c2F2(s)} = c1L−1{F1(s)} + c2L−1{F2(s)}.
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Exemplo: F (s) = 1(s−2)(s+3)2
−→ f(t) = ?
1(s−2)(s+3)2
= As−2
+ B(s+3)2
+ Cs+3
A = 125 ;B = − 1
5 ; C = − 125
L−1[
1(s−2)(s+3)2
]= 1
25L−1(
1s−2
)- 125L−1
(1
s+3
)- 15L−1
(1
(s+3)2
)
= 125 e2t - 1
25 e−3t - 15L−1
(d
ds
(−
1
s + 3
))︸ ︷︷ ︸L−1
(−
d
ds
(1
s + 3
))︸ ︷︷ ︸
tL−1(
1s+3
)=te−3t
= 125e2t- 1
25e−3t- 15 te−3t
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
2. Modelos Lineares de Espaco de Estados
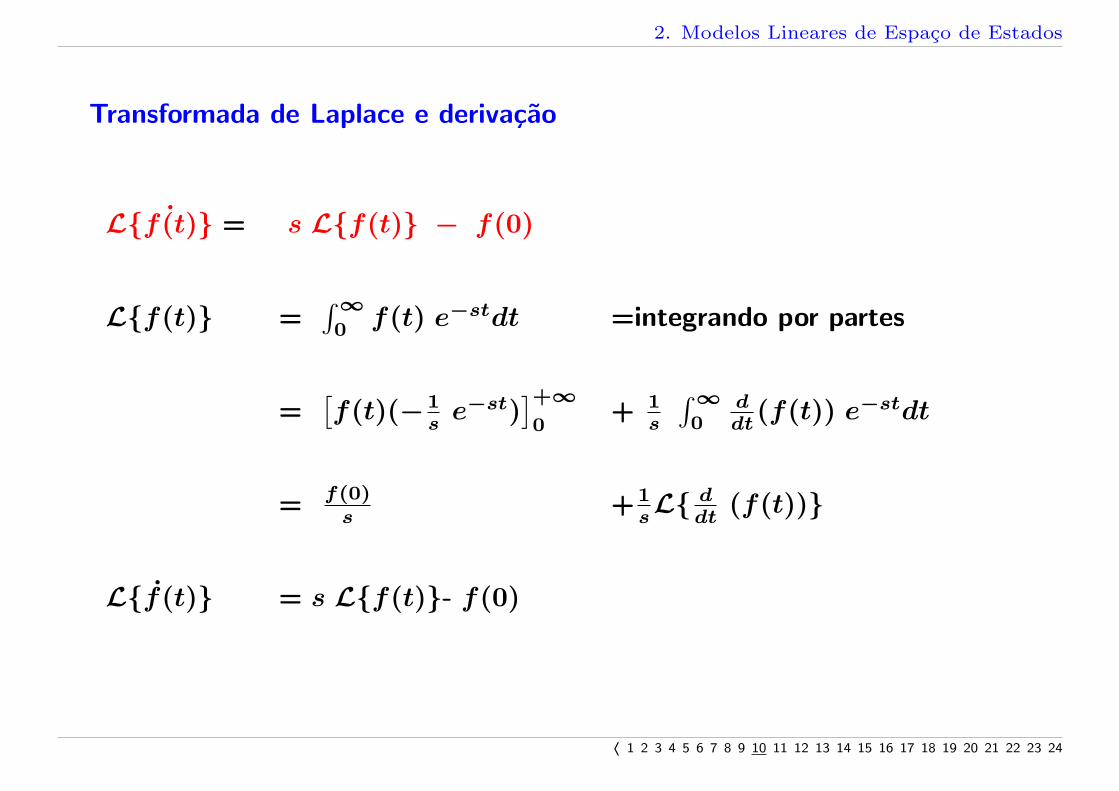
Transformada de Laplace e derivacao
L{ ˙f(t)} = s L{f(t)} − f(0)
L{f(t)} =∫ ∞0
f(t) e−stdt =integrando por partes
=[f(t)(−1
se−st)
]+∞0
+ 1s
∫ ∞0
ddt
(f(t)) e−stdt
= f(0)s
+1sL{ d
dt(f(t))}
L{f(t)} = s L{f(t)}- f(0)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Generalizando:
L{f (k)} =skL{f} -∑k−1
l=0 sk−1−lf (l)(0)
=skL{f} - sk−1 f(0) − sk−2 f (1)(0) − · · · − f (k−1)(0)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Convolucao e a transformada de Laplace
P1: Sejam f, g : [0, +∞[ → R, seccionalmente contınuas
• O produto de convolucao ou convolucao de f e g dado por
(f ∗ g) (t) =∫ t
0
f(t − τ ) g(τ ) dτ.
Elemento neutro do produto de convolucao → δ tal que:
(δ ∗ f) (t) :=∫ t
0
δ(t − τ ) f(τ ) dτ = f(t)
δ → ”funcao” δ de Dirac → nao e uma funcao!!!
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
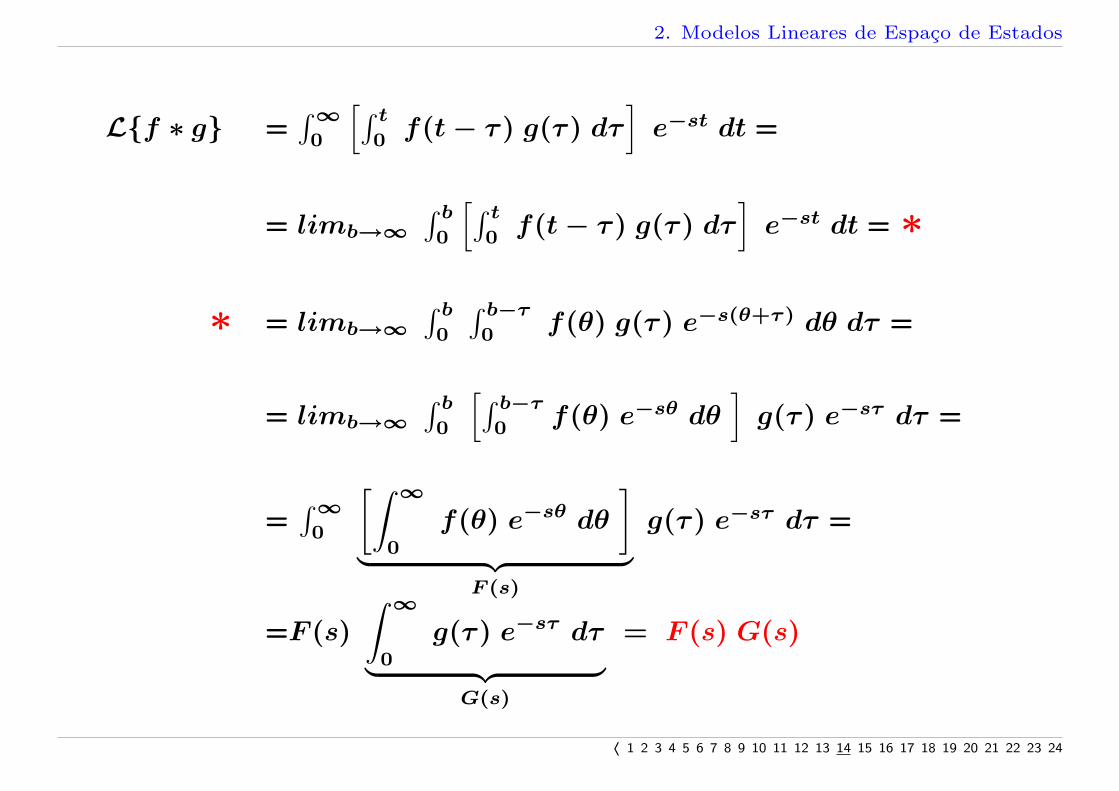
Teorema: Sejam f e g satisfazendo P1, e de ordem exponencial.
Entao:
L{f ∗ g} = L{f} L{g} = F (s) G(s)
Corolario: L{δ} = 1
Demonstracao do teorema →
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
2. Modelos Lineares de Espaco de Estados
L{f ∗ g} =∫ ∞0
[∫ t
0f(t − τ ) g(τ ) dτ
]e−st dt =
= limb→∞∫ b
0
[∫ t
0f(t − τ ) g(τ ) dτ
]e−st dt = ∗
∗ = limb→∞∫ b
0
∫ b−τ
0f(θ) g(τ ) e−s(θ+τ) dθ dτ =
= limb→∞∫ b
0
[∫ b−τ
0f(θ) e−sθ dθ
]g(τ ) e−sτ dτ =
=∫ ∞0
[∫ ∞
0
f(θ) e−sθ dθ
]︸ ︷︷ ︸
F (s)
g(τ ) e−sτ dτ =
=F (s)∫ ∞
0
g(τ ) e−sτ dτ︸ ︷︷ ︸G(s)
= F (s) G(s)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
∗
t
τ
→
θ = t − τ dθ = dt
τ
τ : 0 → b
t : τ → b
→
τ : 0 → b
θ : 0 → b − τ
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Aplicacao da transformada de Laplace aos sistemas EE x(t) = A x(t) + Bu(t)
y(t) = C x(t) + Du(t)↓ L sX(s) − x(0) = A X(s) + BU(s)
Y (s) = C X(s) + DU(s)↓ (sIn − A)X(s) = x(0) + BU(s)
Y (s) = C X(s) + DU(s)↓ X(s) = (sIn − A)−1x(0) + (sIn − A)−1BU(s)
Y (s) = C (sIn − A)−1x(0) + [C(sIn − A)−1B + D]U(s)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Quando o sistema esta livre da influencia da entrada, isto e, quando
u(t) = 0 e portanto U(s) = 0:
X(s) = (sIn − A)−1x(0) =: Xl(s) → evolucao livre do estado
Y (S) = C(sIn − A)−1x(0) =: Yl(s) → evolucao livre da saıda / do
sistema
Quando os sistema tem condicao inicial nula, isto e, x(0) = 0, e e apenas
forcado pela entrada:
X(s) = (sIn − A)−1BU(s) =: Xf(s) → evolucao forcada do estado
Y (s) = [C(sIn − A)−1B + D]U(s) =: Yf(s) → evolucao forcada da
saıda / do sistema
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Yf(s) = [C(sIn − A)−1B + D]︸ ︷︷ ︸ U(s)
Funcao de transferencia do sistema
↓funcao (matricial) racional propria
∗
∗As suas entradas sao funcoes racionais (i.e., quocientes de dois
polinomios) proprias (i.e., o grau do denominador nao excede o do
numerador).
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
2. Modelos Lineares de Espaco de Estados
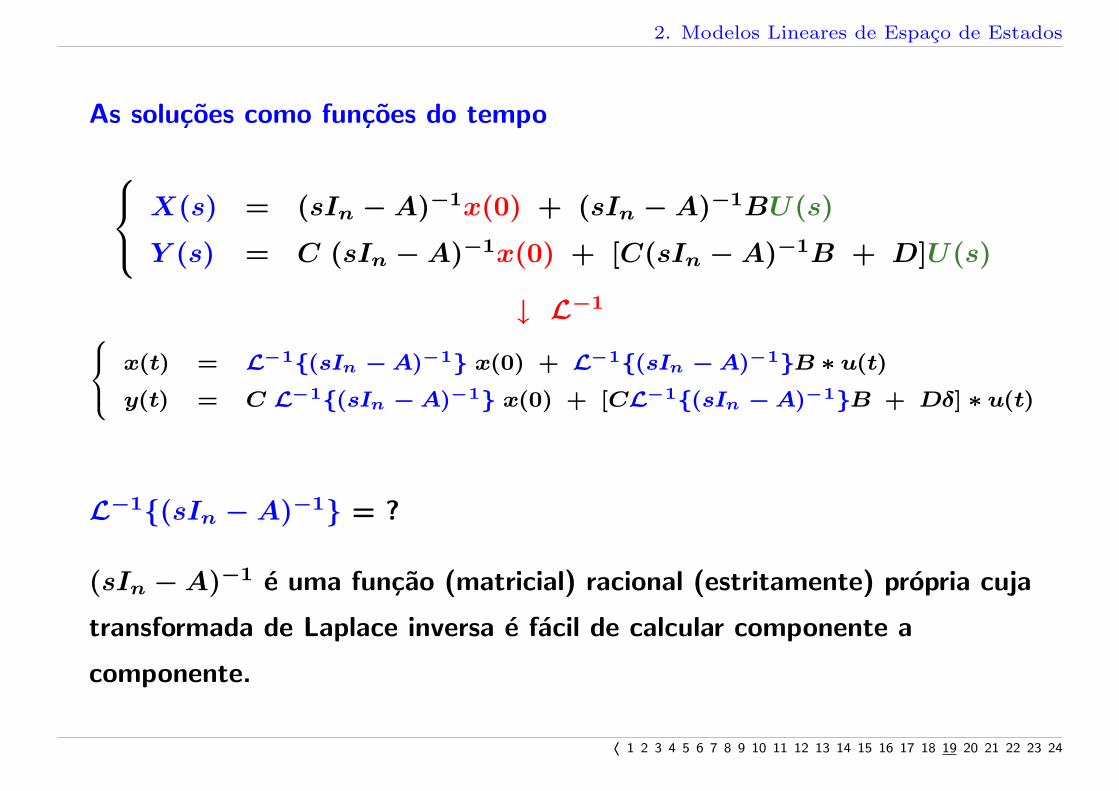
As solucoes como funcoes do tempo
X(s) = (sIn − A)−1x(0) + (sIn − A)−1BU(s)
Y (s) = C (sIn − A)−1x(0) + [C(sIn − A)−1B + D]U(s)
↓ L−1 x(t) = L−1{(sIn − A)−1} x(0) + L−1{(sIn − A)−1}B ∗ u(t)
y(t) = C L−1{(sIn − A)−1} x(0) + [CL−1{(sIn − A)−1}B + Dδ] ∗ u(t)
L−1{(sIn − A)−1} = ?
(sIn − A)−1 e uma funcao (matricial) racional (estritamente) propria cuja
transformada de Laplace inversa e facil de calcular componente a
componente.
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Exemplo:
Calcule L−1{(sIn − A)−1} para A =
1 2
−2 1
.
(sI − A)−1 =
s−1(s−1)2+4
2(s−1)2+4
−2(s−1)2+4
s−1(s−1)2+4
L−1{(sI − A)−1} = et
cos 2t sin 2t
−sin 2t cos 2t
(verifique!)
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
2. Modelos Lineares de Espaco de Estados
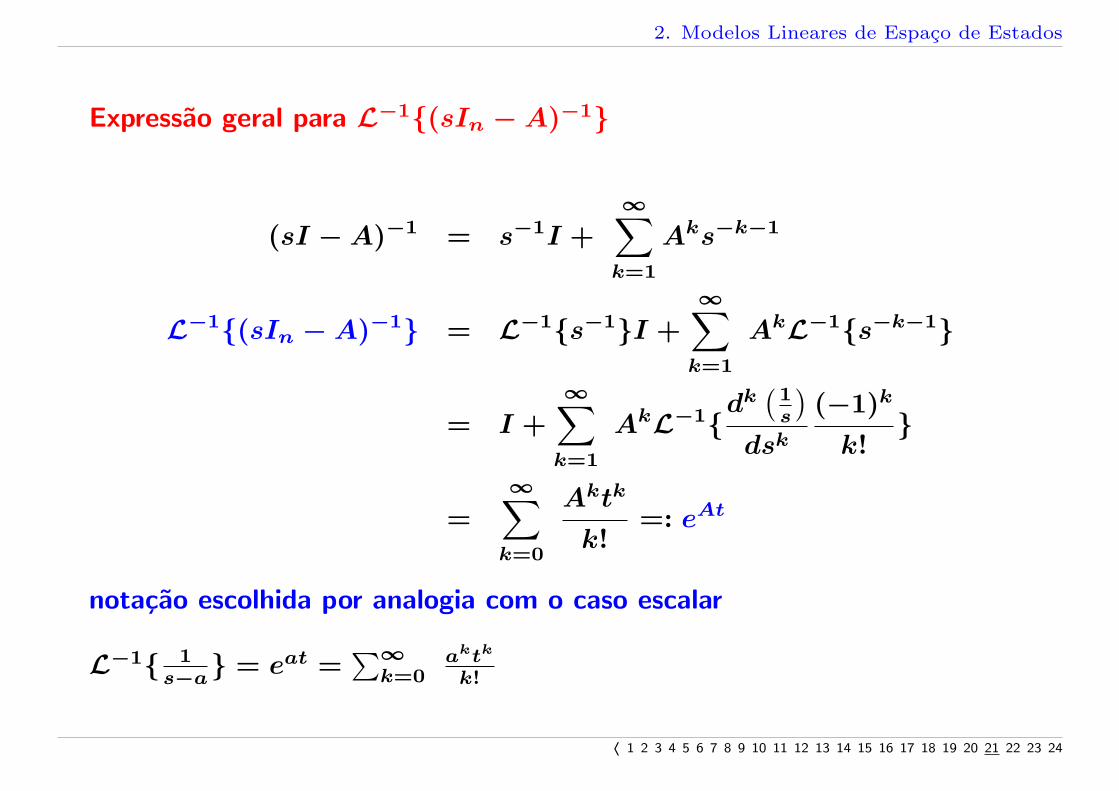
Expressao geral para L−1{(sIn − A)−1}
(sI − A)−1 = s−1I +∞∑
k=1
Aks−k−1
L−1{(sIn − A)−1} = L−1{s−1}I +∞∑
k=1
AkL−1{s−k−1}
= I +∞∑
k=1
AkL−1{dk
(1s
)dsk
(−1)k
k!}
=∞∑
k=0
Aktk
k!=: eAt
notacao escolhida por analogia com o caso escalar
L−1{ 1s−a
} = eat =∑∞
k=0aktk
k!
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Expressao geral para as solucoes no domınio do tempo x(t) = L−1{(sIn − A)−1} x(0) + L−1{(sIn − A)−1}B ∗ u(t)
y(t) = C L−1{(sIn − A)−1} x(0) + [CL−1{(sIn − A)−1}B + Dδ] ∗ u(t)
x(t) = eAt x(0) + eAtB ∗ u(t)
y(t) = C eAt x(0) + [CeAtB + Dδ] ∗ u(t)
x(t) = eAtx(0)︸ ︷︷ ︸xl(t)
+∫ t
0
eA(t−τ)B u(τ )dτ︸ ︷︷ ︸xf (t)
y(t) = CeAtx(0)︸ ︷︷ ︸yl(t)
+∫ t
0
CeA(t−τ)B u(τ )dτ + Du(t)︸ ︷︷ ︸yf (t)
evolucao livre evolucao forcada
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
• Para t0 ≥ 0, as solucoes tambem podem ser escritas na seguinte forma:
x(t) = eA(t−t0)x(t0) +∫ t
t0eA(t−τ)B u(τ )dτ
y(t) = CeA(t−t0)x(t0) +∫ t
t0CeA(t−τ)B u(τ )dτ + Du(t)
Pois
x(t) = eAtx(0) +∫ t
0eA(t−τ)B u(τ)dτ
= eA(t−t0)(eAt0x(0) + +
∫ t
0eA(t0−τ)B u(τ)dτ
)= eA(t−t0)
(eAt0x(0) + +
∫ t00
eA(t0−τ)B u(τ)dτ)
+ eA(t−t0)(∫ t
t0eA(t0−τ)B u(τ)dτ
)= eA(t−t0)x(t0) +
∫ t
t0eA(t−τ)B u(τ)dτ
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24

2. Modelos Lineares de Espaco de Estados
Yf(s) = [C(sIn − A)−1B + D]︸ ︷︷ ︸ U(s)
Funcao de transferencia
L−1 ↓ ↑ L
Resposta ao impulso ∗
yf(t) =︷ ︸︸ ︷[CeAtB + Dδ] ∗u(t)
yf(t) =∫ t
0CeA(t−τ)B u(τ )dτ + Du(t)
∗ Impulso = funcao δ de Dirac; u = δ ⇒ yf = CeAtB + Dδ.
〈 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24