i. bab i pendahuluan -...
TRANSCRIPT

1
I. BAB I
PENDAHULUAN
I.1. Latar Belakang
Metode ekstra terestrial adalah metode penentuan posisi dengan melakukan
pengamatan atau pengukuran terhadap obyek di luar angkasa baik itu obyek alami
ataupun buatan manusia seperti satelit (Abidin, 2000). Global Navigation Satellite
System (GNSS) adalah salah satu metode penentuan posisi secara ekstra terestrial
dengan menggunakan teknologi satelit navigasi yang diamat dari permukaan bumi
seperti GPS, GLONASS, Galileo, QZSS, Beidou, dan IRNSS. Survei GNSS mampu
memberikan posisi tiga dimensi serta informasi waktu yang akurat dan relatif cepat.
Metode survei GNSS inilah yang paling banyak digunakan untuk penentuan posisi.
Survei GNSS dimanfaatkan dalam berbagai pekerjaan seperti pemetaan,
navigasi, militer, eksplorasi sumber daya alam, rekayasa, transportasi, mitigasi
bencana dan lain-lain. Salah satu alat survei yang umum digunakan adalah receiver
GPS. Khusus dalam bidang survei dan pemetaan diperlukan survei GPS secara teliti
pada berbagai kegiatan teknis seperti pengukuran jaring kontrol dari orde nasional
hingga daerah, survei deformasi, pemetaan bidang tanah, dan lain-lain. Pada
umumnya kegiatan survei dan pemetaan tersebut menggunakan receiver GNSS yang
sudah standar dengan tipe geodetik dan sudah dikalibrasi. Receiver tipe geodetik ini
mampu menghasilkan ketelitian hingga fraksi milimeter.
Menurut International Federation of Surveyors (FIG) receiver GNSS dengan
tipe geodetik relatif mahal mulai dari 145 juta rupiah (Weston dan Schwieger, 2010).
Kondisi kebutuhan penentuan posisi yang tersebut di atas, mendorong para ahli
GNSS untuk menciptakan teknologi yang lebih efektif dan efisien dalam berbagai
aspek, seperti kehandalan, efisiensi waktu, biaya, dan kemudahan. Perkembangan
tersebut mampu menciptakan receiver GNSS yang diproduksi dalam bentuk Original
Equipment Manufacturer (OEM) dengan harga yang jauh lebih murah dari receiver
GNSS tipe geodetik yaitu mulai dari dua juta rupiah (Weston dan Schwieger, 2010).

2
OEM adalah alat yang dirancang dan diproduksi oleh suatu perusahaan
manufaktur berdasarkan spesifikasi yang telah ditentukan oleh perusahaan tersebut.
OEM modul receiver diproduksi dan dijual di pasaran seperti merek Skytraq, U-blox,
Novatel, dan lain-lain. Untuk dapat menggunakannya, alat OEM tersebut pada
umumnya dirakit dengan perangkat lain seperti antena, catu daya, media
penyimpanan, dan kontroler dengan perangkat lunak untuk pengoperasiannya. Hal
tersebut menunjukkan perbedaan yang signifikan antara OEM modul receiver GPS
dengan receiver geodetik yang kondisinya memang diciptakan untuk menghadapi
berbagai kondisi dan sudah terintegrasi dengan perangkat pendukung lain secara
permanen.
Pada prinsipnya cara kerja kedua alat tersebut sama yaitu menggunakan
pengamatan code dan carrier phase. Code dan carrier phase digunakan untuk
menghitung jarak antara satelit yang berada di luar angkasa dengan receiver yang
berada di permukaan bumi melalui fungsi code dan carrier phase. Perhitungan yang
akurat sangat menentukan akurasi perhitungan untuk menentukan posisi sebuah
receiver. Sebelum itu sebuah receiver mampu melacak satelit dengan baik untuk
dapat melakukan inisialisasi penentuan posisinya, karena semakin banyak satelit
yang dapat dilacak akan semakin presisi data yang diamat.
OEM diklaim mampu memberikan solusi ketelitian posisi dalam fraksi
sentimeter (Dabove dan Manzino, 2014), lebih rendah dibandingkan dengan receiver
geodetik. Sampai saat ini alat tersebut sudah banyak digunakan untuk navigasi dan
mulai digunakan untuk survei dan pemetaan. Untuk itu, OEM tersebut masih perlu
dikembangkan dan dilakukan penelitian lebih lanjut untuk menghasilkan produk
yang lebih baik khususnya untuk survei dan pemetaan.
Penelitian ini bertujuan untuk memperoleh kemampuan pelacakan satelit,
kemampuan pengukuran code dan kemampuan pengukuran carrier phase pada OEM
modul receiver GPS dengan antena geodetik menggunakan data hasil pengukuran
yang dilakukan. Code dan carrier phase yang diterima akan sangat mempengaruhi
ketelitian pengukuran yang dilakukan. Penelitian ini mengacu pada kemampuan
standar receiver tipe geodetik sehingga dapat diketahui kemampuan pengukuran
pseudorange dan carrier phase oleh OEM modul receiver GPS serta kelayakan alat
tersebut untuk kegiatan survei dan pemetaan.

3
I.2. Identifikasi Masalah
Berdasarkan latar belakang di atas, OEM modul receiver GNSS dengan
antena Geodetik mulai dimanfaatkan untuk bidang survei dan pemetaan yang pada
umumnya menggunakan receiver geodetik. Walaupun dari segi harga jauh lebih
murah, namun ketelitiannya berbanding terbalik. Faktor yang sangat mempengaruhi
ketelitian yang dihasilkan oleh suatu receiver antara lain kemampuan pengukuran
code dan carrier phase. Kemampuan tersebut dapat dilihat dari kemampuan
pelacakan satelit, kemampuan pengukuran pseudorange, kemampuan pengukuran
carrier phase. Untuk itu, diperlukan analisis pada data hasil pengukuran OEM
dibandingkan dengan nilai standar receiver geodetik agar dapat diketahui kelayakan
produk tersebut untuk bidang survei dan pemetaan.
I.3. Pertanyaan Penelitian
Untuk mencari solusi atas permasalahan yang ada, maka dalam penelitian ini
terdapat beberapa pertanyaan antara lain:
1. Bagaimana kemampuan pelacakan satelit oleh OEM modul receiver GPS
dengan antena Geodetik dilihat dari nilai SNR?
2. Bagaimana kemampuan pengukuran pseudorange oleh OEM modul receiver
GPS dengan antena Geodetik dilihat dari nilai ORD?
3. Bagaimana kemampuan pengukuran carrier phase oleh OEM modul receiver
GPS dengan antena Geodetik dilihat dari nilai residual carrier phase double
difference?
I.4. Tujuan Penelitian
Tujuan yang hendak dicapai dalam penelitian ini adalah:
1. Perolehan kualitas kemampuan pelacakan satelit oleh OEM modul receiver
GPS dengan antena Geodetik dibuktikan dengan nilai SNR.
2. Perolehan kualitas kemampuan pengukuran pseudorange oleh OEM modul
receiver GPS dengan antena Geodetik dibuktikan dengan nilai ORD.
3. Perolehan kualitas kemampuan pengukuran carrier phase oleh OEM modul
receiver GPS dengan antena Geodetik dibuktikan dengan nilai residual
carrier phase double difference.

4
I.5. Manfaat Penelitian
Penelitian ini diharapkan mampu memberikan kontribusi bagi ilmu
pengetahuan tentang kemampuan code dan carrier phase oleh OEM modul receiver
GPS dengan antena Geodetik. Pengetahuan tersebut diharapkan mampu memicu
penelitian lanjutan yang terkait dan pemanfaatan receiver yang diteliti pada bidang
survei dan pemetaan.
I.6. Cakupan Penelitian
Ditinjau dari beberapa aspek, diberikan batasan - batasan dalam penelitian ini
antara lain:
1. Perangkat keras yang digunakan dalam penelitian ini adalah OEM modul
receiver GPS, receiver GPS tipe geodetik dan antena geodetik.
2. Penelitian ini dilakukan pada titik yang sudah diketahui koordinatnya, dan
titik yang memiliki kondisi ideal untuk pengukuran dengan sedikit obstruksi
dan multipath.
3. Pengamatan dilakukan dengan metode statik zero baseline.
4. Satelit GNSS yang digunakan dalam penelitian ini adalah satelit GPS
5. Data hasil pengamatan diolah dengan metode ORD dan double difference.
6. Analisis yang dilakukan meliputi:
a. Nilai SNR OEM dibandingkan dengan nilai standar SNR geodetik
yang mengacu pada penelitian Langley (1997).
b. Nilai ORD OEM dibandingkan dengan nilai standar ORD geodetik
yang mengacu pada SPS-PS-GPS (2008).
c. Nilai residual carrier phase OEM dibandingkan dengan nilai standar
residual carrier phase geodetik yang mengacu pada penelitian
Muravchik, dkk (2005).
I.7. Tinjauan Pustaka
OEM modul receiver GPS sudah berkembang selama kurang lebih sepuluh
tahun silam. Beberapa penelitian telah dilakukan untuk meningkatkan kemampuan
dan kehandalan OEM di lapangan.

5
Penelitian yang dilakukan antara lain terkait pengukuran code dan carrier
phase seperti yang dilakukan oleh Takasu dan Yasuda pada tahun 2004 di Jepang.
Penelitian ini menggunakan metode akuisisi dataa secara real time kinematik (RTK).
Selama pengamtan berlangsung Takasu dan Yasuda menganalisis antena PCV
(phase center variation), multipath, dan SNR atau carrier to noise density (C/N0).
Data hasil pengukuran pseudorange dan carrier phase digunakan untuk
mengevaluasi akurasi pengukuran RTK, ambiguitas fase, dan time to first fix (TTFF).
Hasil dari analisis dan evaluasi yang dilakukan antara lain terdapat perbedaan yang
signifikan terhadap pengukuran code antara receiver geodetik dengan receiver GPS
Single-frequency berbiaya rendah yaitu pada rentang nilai ± 3 m, namun untuk
pengukuran carrier phase tidak ada perbedaan yang signifikan yaitu pada rentang
nilai ± 3 cm. Nilai root mean square error koordinatnya pada rentang nilai ± 2 cm.
Takasu dan Yasuda menyimpulkan bahwa RTK dengan receiver/antena GPS Single-
frequency berbiaya rendah layak digunakan untuk penentuan posisi secara presisi,
namun kinerja inisialisasinya masih rendah.
Berbeda dengan penelitian yang dilakukan oleh Takasu dan Yasuda,
Schwieger, dkk. melakukan penelitian untuk mengetahui kemungkinan penggunaan
teknologi receiver GPS berbiaya rendah untuk aplikasi penentuan posisi kelas
geodetik di Mesir pada tahun 2005. Penelitian yang dilakukan oleh Schwieger, dkk.
menggunakan metode akuisisi data secara short baseline dan diolah dengan post
processing. Alat yang digunakan adalah OEM receiver modul GPS GARMIN eTrex
dengan menggunakan antena standar tipe geodetik dan telah dikalibrasi. Data hasil
pengukuran short baseline dianalisis terhadap residu pengukuran code dan carrier
phase. Nilai residu pengukuran code berada pada rentang nilai ± 10 m dari lima
baseline yang diukur. Nilai residu pengukuran carrier phase berada pada rentang
nilai ± 5 mm dari lima baseline yang diukur. Baseline dan nilai koordinat yang
didapat memiliki ketelitian 8 cm.
Penelitian yang serupa dengan Schwieger, dkk. dilakukan oleh Andrei, dkk.
pada tahun 2011 di Denmark dengan metode dan analisis yang lebih komplek.
Penelitian ini bertujuan untuk mengevaluasi kemampuan penentuan posisi oleh
modul receiver GPS u-blox LEA 6T. Jika Schwieger, dkk. menggunakan metode
akuisisi secara short baseline, Andrei, dkk. (2011) menggunakan metode zero

6
baseline dan short baseline. Secara umum analisis yang dilakukan terhadap data
hasil pengukuran antara lain adalah kemampuan pengukuran pseudorange dan
kemampuan pengukuran carrier phase. Hasil dari kemampuan pengukuran
pseudorange dengan pengamatan zero baseline dan short baseline dianalisis
menggunakan data residu pseudorange yang hasilnya pada rentang nilai yang sama
yaitu ± 10 m (≈ 0,5 cycle untuk frekuensi L1). Kemampuan pengukuran carrier
phase dengan pengamatan zero baseline dianalisis menggunakan data residu carrier
phase yang hasilnya pada rentang nilai ± 9 cm dan dengan pengamatan zero baseline
memiliki rentang nilai ± 7 cm. Pada elevasi yang rendah memiliki nilai residu yang
besar yang dapat mengurangi kemampuan pengukurannya. Modul receiver GPS u-
blox LEA 6T memiliki kepresisian di bawah 2 cm pada area dengan kondisi
multipath dan obstruksi minimal, sedangkan pada lingkungan yang banyak pohon
dan gedung memiliki kepresisian di bawah 10 cm.
Metode akuisisi secara zero baseline untuk mengevaluasi kinerja OEM modul
receiver yang lain dilakukan pada tahun 2014 oleh Rapiński, dkk. di Polandia.
Tujuan penelitian ini untuk meneliti kemungkinan penggunaan OEM modul receiver
untuk posisi yang presisi dengan pengamatan zero baseline double difference.
Analisis hasil akuisisi data yang dilakukan antara lain kualitas pelacakan satelit
dengan menghitung nilai SNR atau C/N0, menganalisis kualitas pengukuran
pseudorange dengan metode ORD, menganalisis kualitas pengukuran carrier phase
dengan metode double difference, dan menganalisis kualitas penentuan posisi dengan
pengukuran terhadap titik yang sudah diketahui koordinatnya. Hasil dari penelitian
ini antara lain nilai rata-rata SNR 43,79 dBHz dengan nilai variasinya 28 dBHz
sampai dengan 51 dBHz, nilai rata-rata ORD 0,99 m dengan nilai variasinya -10 m
sampai dengan 30 m, dan nilai residual carrier phase 0,013 mm dengan nilai
variasinya -2,7 mm sampai dengan 1,5 mm. Pengamatan yang dilakukan oleh OEM
modul receiver U-blox LEA-6T sebanding dengan receiver tipe geodetik dan dapat
digunakan untuk aplikasi geodesi.
Kinerja pengukuran pseudorange dan carrier phase dengan OEM modul
receiver terus dilakukan. Penelitian yang lebih detil antara OEM modul receiver
dengan setiap satelit yang diamat dilakukan oleh Montenbruck, dkk. (2014) di
Munchen. Penelitian ini menggunakan NovAtel OEM-4 dengan pengamatan zero

7
baseline untuk menganalisis kesalahan pada double difference dan noisenya. Analisis
dilakukan pada data hasil pengolahan double difference dengan satelit tertentu yang
dipilih berdasarkan nilai SNR yang bagus (sinyal kuat) serta nilai clock offset dari
pengamatan tersebut. Berdasarkan nilai SNR dipilih pasangan satelit PRN 17 dan 32
serta PRN 6 dan 9. Hasil dari penelitian tersebut antara lain nilai deviasi
pseudorange dari PRN 17 dan 32 sebesar 0,58 m sedangkan nilai residual carrier
phasenya sebesar 0,82 mm. Nilai deviasi pseudorange dari PRN 6 dan 9 sebesar 0,31
m sedangkan nilai residual carrier phasenya sebesar 0,74 mm. Nilai rata-rata SNR
pada elevasi yang rendah sebesar 42,07 dBHz dan pada elevasi yang tinggi sebesar
50,64 dBHz. Serta nilai cock offset pada data pseudorange sebesar 0,25 ms.
Berdasarkan penelitian sebelumnya tentang kinerja OEM modul receiver
yang berbeda-beda, Everett (2015) di Colorado melakukan penelitian pada modul
receiver U-blox M8T untuk penentuan posisi yang presisi secara komprehensif.
Everett membandingkan hasil pengamatan menggunakan zero baseline double
difference dan short baseline (8 km). Penelitan ini bertujuan untuk mengetahui
kesalahan pengukuran pseudorange dan carrier phase oleh receiver yang digunakan.
Everett menggunakan perangkat lunak RTKLIB untuk mengkarakteristikkan dan
menganalisis residual pengukuran pseudorange dan residual carrier phase.
Pengamatan dilakukan selama satu jam pada titik yang memiliki banyak obstruksi
dan multipath. Hasil dari penelitian ini antara lain pada elevasi yang tinggi dan sinyal
yang kuat, nilai rata-rata deviasi pseudorange sebesar 0,24 m dan nilai rata-rata
residual carrier phase sebesar 1,7 mm. Pada elevasi yang lebih rendah dan sinyal
yang beragam nilai rata-rata deviasi pseudorange sebesar 0,46 m dan nilai rata-rata
residual carrier phase sebesar 0,8 mm. Serta secara keseluruhan nilai rata-rata
deviasi pseudorange sebesar 1,02 m dan nilai rata-rata residual carrier phase sebesar
3,9 mm.
I.8. Landasan Teori
I.8.1. GNSS
Global Navigation Satellite System (GNSS) adalah sistem konstelasi satelit
yang mengorbit bumi dengan menyiarkan lokasinya dalam ruang dan waktu. Sistem
satelit navigasi ini digunakan untuk menyediakan informasi lokasi dan waktu dengan

8
memancarkan macam-macam sinar dalam berbagai frekuensi secara terus-menerus,
yang tersedia di semua lokasi di atas permukaan bumi (UNOOSA, 2011).
Beberapa negara telah mengembangkan teknologi GNSS. GNSS yang ada
saat ini antara lain:
1. GPS milik Amerika Serikat,
2. GLONASS milik Rusia,
3. Galileo milik Uni Eropa,
4. Compass atau Beidou milik Cina,
5. IRNSS milik India, dan
6. QZSS milik Jepang.
I.8.1.1 GPS (Global Positioning System). GPS merupakan sistem satelit
navigasi yang digunakan dalam penelitian ini. GPS adalah sistem satelit navigasi
milik Departemen Pertahanan (Departemen of Defense) Amerika Serikat yang
menyediakan layanan penyedia informasi posisi, navigasi dan layanan waktu
(Department Of Defense, 2008). GPS terdiri dari tiga segmen, yaitu segmen ruang,
segmen kontrol dan segmen pengguna. Segmen-segmen tersebut memiliki fungsi
masing-masing. Fungsi segmen-segmen tersebut antara lain (Department Of
Defense, 2008):
1. Segmen ruang merupakan stasiun radio di luar angkasa yang dilengkapi
dengan antena untuk mengirim dan menerima sinyal gelombang. Sinyal dari
satelit kemudian akan diterima receiver GPS yang ada di permukaan bumi
dan digunakan untuk menentukan posisi, kecepatan, serta waktu.
2. Segmen kontrol merupakan stasiun pengontrol dan pemonitor satelit selain
bertugas untuk mengontrol dan memonitor satelit, juga berfungsi untuk
menentukan orbit dari seluruh satelit GPS.
3. Segmen pengguna memiliki alat penerima sinyal GPS yang berfungsi untuk
menerima serta memproses sinyal dari satelit GPS untuk penentuan posisi,
kecepatan, serta waktu.
Angkatan Udara Amerika Serikat mengembangkan, memelihara, dan
mengoperasikan segmen ruang dan kontrol. Satelit GPS memberikan layanan kepada
pengguna sipil dan militer. Layanan sipil ini bebas tersedia untuk semua pengguna
9
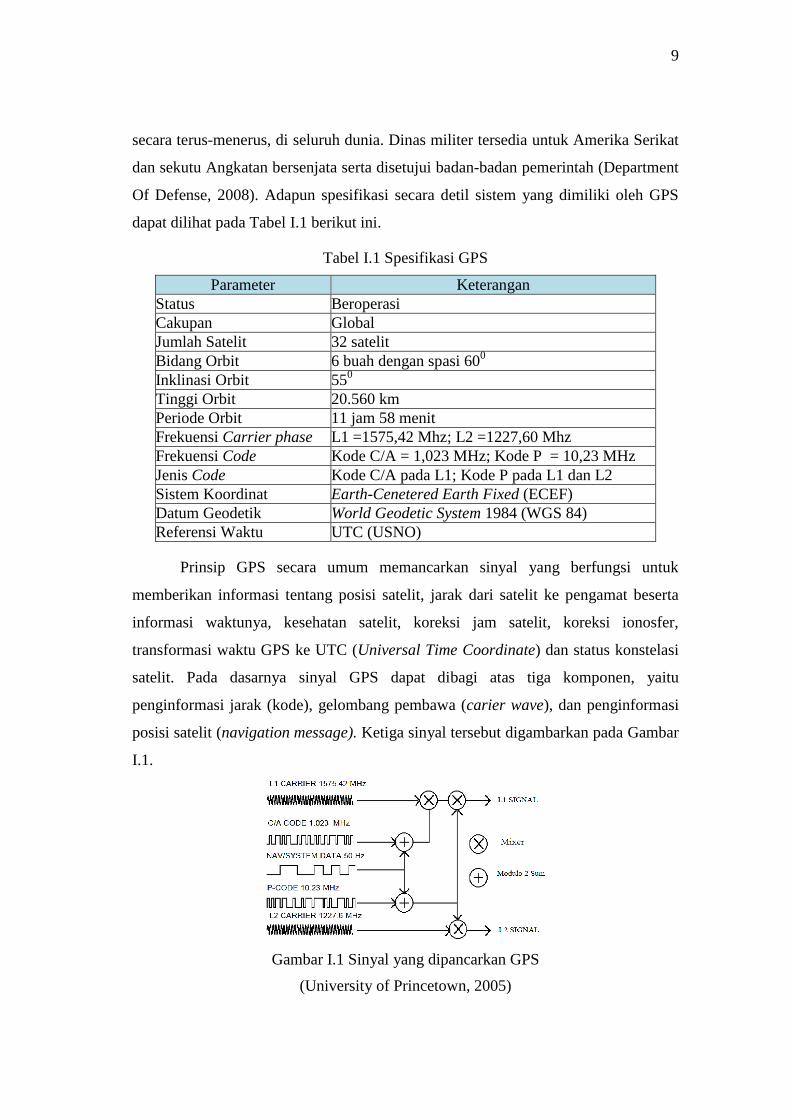
secara terus-menerus, di seluruh dunia. Dinas militer tersedia untuk Amerika Serikat
dan sekutu Angkatan bersenjata serta disetujui badan-badan pemerintah (Department
Of Defense, 2008). Adapun spesifikasi secara detil sistem yang dimiliki oleh GPS
dapat dilihat pada Tabel I.1 berikut ini.
Tabel I.1 Spesifikasi GPS
Parameter Keterangan
Status Beroperasi
Cakupan Global
Jumlah Satelit 32 satelit
Bidang Orbit 6 buah dengan spasi 600
Inklinasi Orbit 550
Tinggi Orbit 20.560 km
Periode Orbit 11 jam 58 menit
Frekuensi Carrier phase L1 =1575,42 Mhz; L2 =1227,60 Mhz
Frekuensi Code Kode C/A = 1,023 MHz; Kode P = 10,23 MHz
Jenis Code Kode C/A pada L1; Kode P pada L1 dan L2
Sistem Koordinat Earth-Cenetered Earth Fixed (ECEF)
Datum Geodetik World Geodetic System 1984 (WGS 84)
Referensi Waktu UTC (USNO)
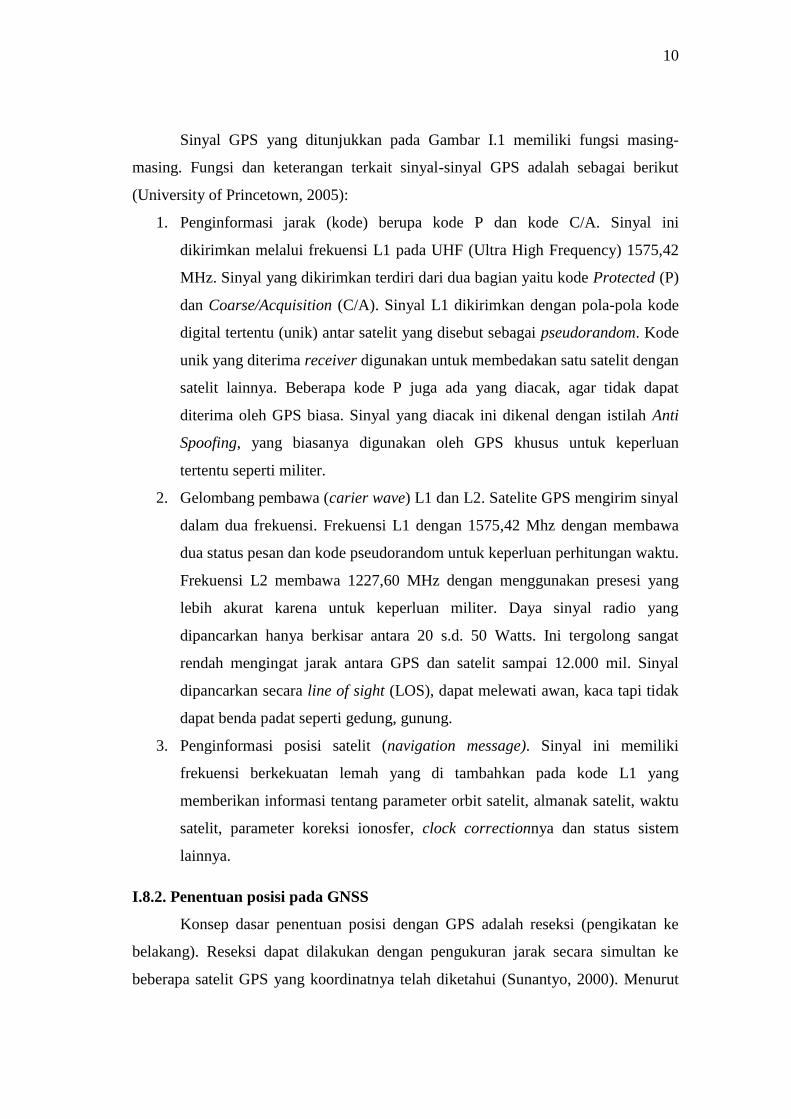
Prinsip GPS secara umum memancarkan sinyal yang berfungsi untuk
memberikan informasi tentang posisi satelit, jarak dari satelit ke pengamat beserta
informasi waktunya, kesehatan satelit, koreksi jam satelit, koreksi ionosfer,
transformasi waktu GPS ke UTC (Universal Time Coordinate) dan status konstelasi
satelit. Pada dasarnya sinyal GPS dapat dibagi atas tiga komponen, yaitu
penginformasi jarak (kode), gelombang pembawa (carier wave), dan penginformasi
posisi satelit (navigation message). Ketiga sinyal tersebut digambarkan pada Gambar
I.1.
Gambar I.1 Sinyal yang dipancarkan GPS
(University of Princetown, 2005)
10
Sinyal GPS yang ditunjukkan pada Gambar I.1 memiliki fungsi masing-
masing. Fungsi dan keterangan terkait sinyal-sinyal GPS adalah sebagai berikut
(University of Princetown, 2005):
1. Penginformasi jarak (kode) berupa kode P dan kode C/A. Sinyal ini
dikirimkan melalui frekuensi L1 pada UHF (Ultra High Frequency) 1575,42
MHz. Sinyal yang dikirimkan terdiri dari dua bagian yaitu kode Protected (P)
dan Coarse/Acquisition (C/A). Sinyal L1 dikirimkan dengan pola-pola kode
digital tertentu (unik) antar satelit yang disebut sebagai pseudorandom. Kode
unik yang diterima receiver digunakan untuk membedakan satu satelit dengan
satelit lainnya. Beberapa kode P juga ada yang diacak, agar tidak dapat
diterima oleh GPS biasa. Sinyal yang diacak ini dikenal dengan istilah Anti
Spoofing, yang biasanya digunakan oleh GPS khusus untuk keperluan
tertentu seperti militer.
2. Gelombang pembawa (carier wave) L1 dan L2. Satelite GPS mengirim sinyal
dalam dua frekuensi. Frekuensi L1 dengan 1575,42 Mhz dengan membawa
dua status pesan dan kode pseudorandom untuk keperluan perhitungan waktu.
Frekuensi L2 membawa 1227,60 MHz dengan menggunakan presesi yang
lebih akurat karena untuk keperluan militer. Daya sinyal radio yang
dipancarkan hanya berkisar antara 20 s.d. 50 Watts. Ini tergolong sangat
rendah mengingat jarak antara GPS dan satelit sampai 12.000 mil. Sinyal
dipancarkan secara line of sight (LOS), dapat melewati awan, kaca tapi tidak
dapat benda padat seperti gedung, gunung.
3. Penginformasi posisi satelit (navigation message). Sinyal ini memiliki
frekuensi berkekuatan lemah yang di tambahkan pada kode L1 yang
memberikan informasi tentang parameter orbit satelit, almanak satelit, waktu
satelit, parameter koreksi ionosfer, clock correctionnya dan status sistem
lainnya.
I.8.2. Penentuan posisi pada GNSS
Konsep dasar penentuan posisi dengan GPS adalah reseksi (pengikatan ke
belakang). Reseksi dapat dilakukan dengan pengukuran jarak secara simultan ke
beberapa satelit GPS yang koordinatnya telah diketahui (Sunantyo, 2000). Menurut

11
Sunantyo (2000), pengamatan dasar pada GNSS dalam penentuan jarak ke satelit
terdapat tiga macam yaitu pseudorange, carrier phase dan doppler. Maka dari itu
dalam penelitian ini dilakukan analisis terhadap pengukuran pseudorange dan carrier
phase.
1.8.2.1. Pseudorange. Pengukuran jarak dengan metode ini didasarkan pada
pengiriman sinyal yang berisi informasi mengenai waktu sementara pemancaran
gelombang, posisi satelit, nomor satelit dan lainnya dari satelit ke receiver. Konsep
perhitungan jarak dengan metode ini didapat dari pengukuran waktu rambat sinyal
yang dipancarkan dari minimal empat satelit GPS ke receiver pada saat bersamaan.
Pengukuran pseudorange dilakukan oleh receiver dengan membandingkan
kode yang diterima dari satelit dan replika kode yang diformulasikan dalam receiver.
Hasil pengamatan dan hubungan-hubungannya dengan parameter lain dapat
diformulasikan sebagai persamaan (I.1) (Fotopoulos, 2000) :
( ) ………………………….(I.1)
Dalam hal ini,
: jarak pseudorange
: jarak sebenarnya
: kesalahan orbit satelit
: kecepatan cahaya
: perbedaan jam satelit dari waktu GPS
: perbedaan jam receiver dari waktu GPS
: bias efek ionosfer
: bias efek troposfer
: multipath
: noise
1.8.2.2. Carrier phase. Pengukuran jarak dengan metode carrier phase
diperoleh dengan mengukur beda fase antara sinyal pembawa yang dibangkitkan
oleh receiver saat penerimaan sinyal berlangsung dengan sinyal pembawa yang
dibangkitkan oleh pemancar sinyal satelit. Konsep perhitungan jarak dengan metode
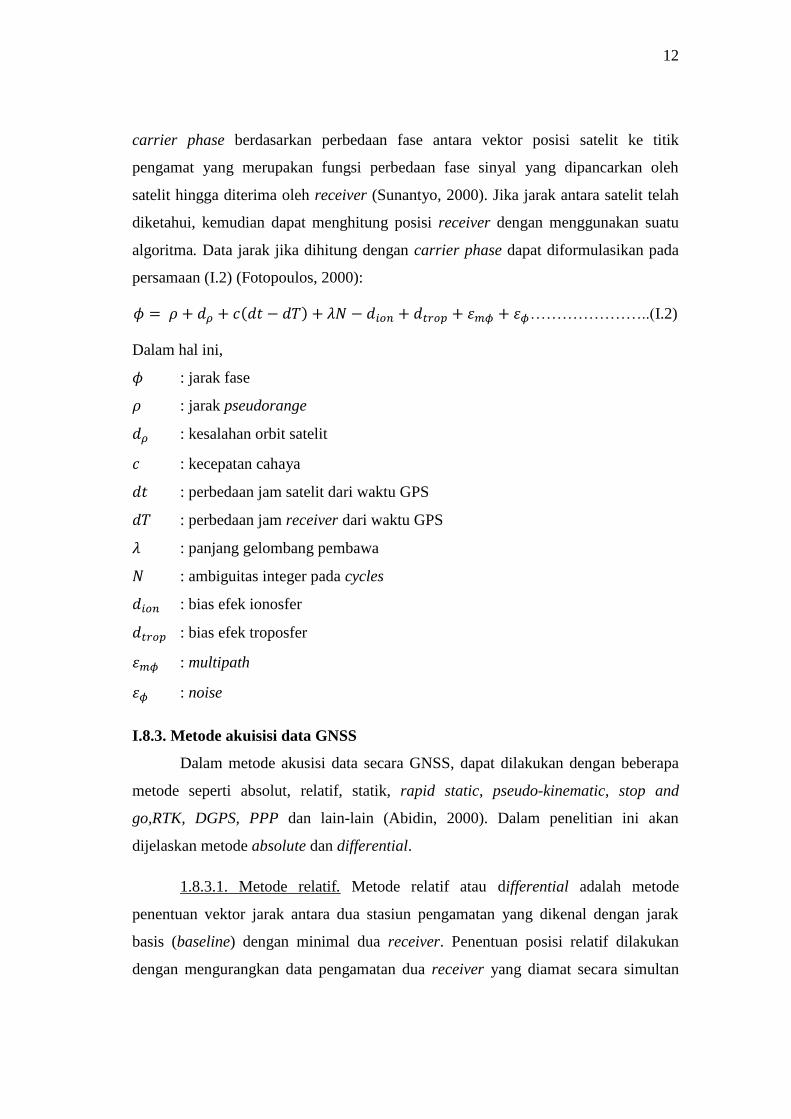
12
carrier phase berdasarkan perbedaan fase antara vektor posisi satelit ke titik
pengamat yang merupakan fungsi perbedaan fase sinyal yang dipancarkan oleh
satelit hingga diterima oleh receiver (Sunantyo, 2000). Jika jarak antara satelit telah
diketahui, kemudian dapat menghitung posisi receiver dengan menggunakan suatu
algoritma. Data jarak jika dihitung dengan carrier phase dapat diformulasikan pada
persamaan (I.2) (Fotopoulos, 2000):
( ) …………………..(I.2)
Dalam hal ini,
: jarak fase
: jarak pseudorange
: kesalahan orbit satelit
: kecepatan cahaya
: perbedaan jam satelit dari waktu GPS
: perbedaan jam receiver dari waktu GPS
: panjang gelombang pembawa
: ambiguitas integer pada cycles
: bias efek ionosfer
: bias efek troposfer
: multipath
: noise
I.8.3. Metode akuisisi data GNSS
Dalam metode akusisi data secara GNSS, dapat dilakukan dengan beberapa
metode seperti absolut, relatif, statik, rapid static, pseudo-kinematic, stop and
go,RTK, DGPS, PPP dan lain-lain (Abidin, 2000). Dalam penelitian ini akan
dijelaskan metode absolute dan differential.
1.8.3.1. Metode relatif. Metode relatif atau differential adalah metode
penentuan vektor jarak antara dua stasiun pengamatan yang dikenal dengan jarak
basis (baseline) dengan minimal dua receiver. Penentuan posisi relatif dilakukan
dengan mengurangkan data pengamatan dua receiver yang diamat secara simultan

13
dari beberapa satelit dengan minimal. Penentuan suatu titik ditentukan secara relatif
terhadap titik lainnya yang telah diketahui koordinatnya (fix). Data ukuran
pengamatan yang digunakan dalam penentuan posisi secara relatif dapat berupa
pseudorange maupun carrier phase. Secara matematis dapat dirumuskan sebagai
persamaan (I.3) dan (I.4) (Kornhauser, 2006):
( )
( ) ( )
( ) ( ) ......................(I.3)
( )
( ) ( )
( ) ( ) ...........(I.4)
Dalam hal ini,
( ) : jarak pseudorange satelit (1) dan receiver (A) pada epok t0
( ): jarak fase (carrier phase) satelit (1) dan receiver (A) pada epok t0
( ) : jarak geometris antara receiver (A) dengan satelit (1) pada epok t0
( ): kesalahan jarak akibat kesalahan ephemeris (orbit) pada satelit (1) dan
receiver (A)
: ambiguitas fase dari pengamatan sinyal-sinyal L1 dan L2 dari satelit (1) dan
receiver (A)
c : kecepatan cahaya dalam ruang vakum (m/s)
: panjang gelombang dari sinyal (m)
: fase gelombang yang terukur
( ): kesalahan dan offset dari jam satelit (1) pada epok t0
( ): kesalahan dan offset dari jam receiver (A) pada epok t0
TA : bias yang disebabkan oleh refraksi troposfer pada receiver (A)
IA : bias yang disebabkan oleh refraksi ionosfer pada receiver (A)
: gangguan (noise) yang disebabkan oleh mutipath
Dengan mengurangkan data antar receiver beberapa kesalahan dapat
direduksi atau dihilangkan. Kesalahan yang dapat direduksi adalah kesalahan bias
ionosfer, troposfer, dan ephemeris. Kesalahan yang dapat dihilangkan adalah
kesalahan jam receiver dan jam satelit. Reduksi dan penghilangan berbagai
kesalahan dan bias ini meningkatkan ketelitian posisi yang diperoleh hingga fraksi
milimeter. Efektifitas proses pengurangan ini tergantung pada jarak antara stasiun
monitor dengan stasiun pengamatan yang ditentukan posisinya. Semakin pendek
jarak tersebut maka semakin efektif, dan berlaku juga sebaliknya (Kornhauser,

14
2006). Metode relatif ini digunakan dalam zero baseline yang dilakukan dengan
menggunakan dua receiver atau lebih. Zero baseline akan dibahas lebih lanjut dalam
sub-bab 1.8.7.
I.8.4. Differencing Data GNSS
Metode yang digunakan pada penentuan posisi secara differential atau relatif
adalah teknik differencing, yaitu mengurangkan data pengamatan GNSS untuk
mengeliminasi dan mereduksi efek dari sebagian kesalahan dan bias yang terjadi
pada saat melakukan pengamatan. Reduksi dan penghilangan berbagai kesalahan dan
bias ini meningkatkan ketelitian posisi yang diperoleh. Pengolahan data pengamatan
GNSS secara differencing, dikenal beberapa metode, yaitu single difference, double
difference dan triple (El-Rabbany, 2002).
1.8.4.1. Single difference. Single difference dikenal sebagai differencing antar
receiver. Single difference merupakan penentuan posisi dengan cara mengurangkan
(differencing) dua persamaan pengamatan penentuan posisi one way (OW). Jika
terdapat dua receiver (k dan l) yang mengamati satu satelit (satelit m), dengan
epoch (t) yang sama dapat dituliskan dengan persamaan (I.5) dan (I.6) (Leick, 2004):
( ) ..............................................................(I.5)
( ) ( ) ...............................................(I.6)
Persamaan (I.5) dan (I.6) tersebut, diturunkan menjadi persamaan
pengurangan (I.7) sampai dengan (I.10) (Leick, 2004) :
( )
( ) ( )........................................................................................(I.7)
( )
( ) ( )
( ) ( )
( ) ................(I.8)
( )
( ) ( ).......................................................................................(I.9)
( )
( )
( ) ( ) ( )
( ) ( )
.......(I.10)
Dalam hal ini,
P : jarak pseudorange (m)
Φ : jarak fase (m)
ρ : jarak geometris pengamat dengan satelit (m)
c : kecepatan cahaya dalam ruang vakum (m/s)

15
λ : panjang gelombang (m)
N : ambiguitas fase
e, : efek multipath
ε : efek noise
dt, dT : kesalahan offset jam receiver dan jamsatelit (m)
dion, dtrop : bias refraksi ionosfer dan troposfer
Teknik single differencing ini dapat mengeliminasi efek dari bias jam satelit
dan juga mereduksi efek dari bias troposfer dan ionosfer.
1.8.4.2. Double difference. Double difference, merupakan teknik penentuan
posisi dengan cara mengurangkan (differencing) dua persamaan pengamatan
penentuan posisi relative single difference (SD), Jika terdapat dua receiver (k dan l)
yang mengamati dua satelit (satelit m dan n), dengan epoch (t) yang sama dapat
dituliskan dengan persamaan (I.11) sampai dengan (I.14) (Leick, 2004).
( )
( ) ( ).....................................................................................(I.11)
( )
( ) ( )
( ) ( )
( ) .......(I.12)
( )
( ) ( )...................................................................................(I.13)
( )
( ) ( ) ( )
( ) ( )
( ) .......(I.14)
Dalam hal ini notasi yang digunakan adalah sama dengan notasi pada persamaan
(I.5) sampai dengan (I.10)
Proses differencing tersebut meliputi pengeliminasian kesalahan jam
satelit dan receiver, mereduksi efek kesalahan orbit, bias ionosfer dan bias troposfer
pada data pengamatan, pengestimasian ambiguitas fase.
1.8.4.3. Triple difference. Triple difference merupakan suatu teknik
penentuan posisi dengan cara mengurangkan dua data pengamatan double difference
dengan epoch yang berbeda. Jika terdapat dua receiver (k dan l) yang mengamati
dua satelit (satelit m dan n), secara simultan pada epoch (t1) dan (t2) maka hasil
pengurangan yang diturunkan dari persamaan (I.11) sampai dengan (I.14) menjadi
persamaan (I.15) sampai dengan (I.18) (Leick, 2004).
( )
( ) ( )...........................................................................(I.15)

16
( )
( ) ( ) ( )
( )
( ) ........................................................................................(I.16)
( )
( ) ( )..........................................................................(I.17)
( )
( ) ( ) ( )
( )
( ) ( )
.......................................................................(I.18)
Dalam hal ini notasi yang digunakan adalah sama dengan notasi pada persamaan
(I.5) sampai dengan (I.10)
Hasil akhir dari triple difference dari persamaan (I.15) sampai dengan (I.18)
masih menyisakan efek ionosfer, bias troposfer, multipath. Bias dan kesalahan
tersebut tidak dapat dieliminasi dengan menggunakan teknik differencing tetapi
hanya dapat direduksi.
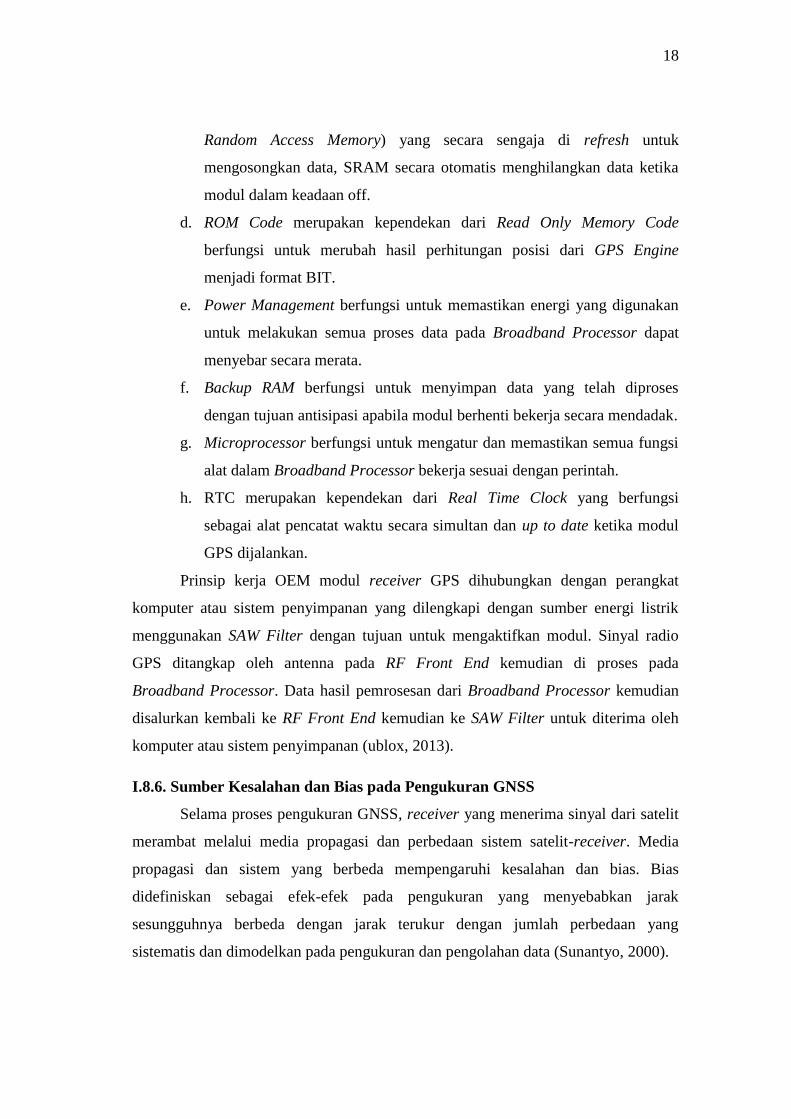
I.8.5. OEM Modul Receiver GPS
Original equipment manufacturer (OEM) adalah perangkat baik keras ataupun
lunak yang dirancang dan diproduksi oleh suatu perusahaan manufaktur berdasarkan
spesifikasi yang telah ditentukan oleh perusahaan tersebut. Salah satu OEM
perangkat keras adalah modul receiver GPS. OEM modul receiver GPS belum
memiliki kemasan dan ukurannya kecil dalam fraksi sentimeter (Skytraq, 2015).
.
Gambar I.2 Blok diagram OEM modul receiver GPS secara umum
(ublox, 2013)
TCXO or Crystal
RTC Crystal

17
Gambar I.2 merupakan skema komponen dari modul GPS secara umum.
OEM modul receiver GPS merupakan suatu chip yang di dalamnya diberikan fungsi
untuk menerima sinyal satelit GPS. Modul GPS banyak digunakan pada berbagai alat
yang terdapat fungsi navigasi di dalamnya, contohnya smartphone. Bagian terpenting
pada modul GPS antara lain, SAW Filter, RF Front End, dan Broadband Processor.
Adapun fungsi fungsinya adalah sebagai berikut (ublox, 2013):
1. SAW Filter. SAW Filter merupakan kependekan dari Surface Acoustic Wave
Filter yang berfungsi untuk merubah sinyal elektrik menjadi sinyal akustik
dan sebaliknya. Sinyal akustik tersebut kemudian diteruskan pada RF Front
End. SAW Filter juga menerima sinyal akustik dari RF Front End untuk
kemudian dirubah menjadi sinyal elektrik. Tujuan adanya SAW Filter adalah
meminimalisir rambatan panas pada sensor yang disebabkan oleh sinyal
elektrik pada modul GPS.
2. RF Front End. RF Front End merupakan kependekan dari Radio Frequency
Front End yang berfungsi sebagai penerima sinyal radio utama dalam
komponen modul GPS. RF Front End tersebut dilengkapi dengan integrated
LNA (integrated Low Noise Amplifier) yang berfungsi untuk memperkuat
sinyal radio lemah yang ditangkap.
3. Broadband Processor. Broadband Processor merupakan alat pemrosesan
data sinyal radio yang dipancarkan satelit GPS. Broadband Processor
tersebut terdiri dari IF Filter, GPS Engine, SRAM, ROM Code, Power
management, Backup RAM, Microprocessor, dan RTC. Fungsi masing-
masing bagian dari Broadband Processor sebagai berikut
a. IF Filter. IF Filter merupakan kependekan dari Intermediate Frequency
Filter yang berfungsi untuk menyaring sinyal radio dari RF Front End
menjadi sinyal intermediate agar dapat diproses lebih lanjut di dalam
Broadband Processor.
b. GPS Engine. GPS Engine berfungsi untuk melakukan proses perhitungan
agar posisi modul di permukaan bumi dapat diketahui. S
c. SRAM merupakan kependekan dari Static Random Access Memory,
yaitu sejenis semi konduktor yang berfungsi sebagai penyimpanan data
sementara yang bersifat statis. Berbeda dengan DRAM (Dynamic
18
Random Access Memory) yang secara sengaja di refresh untuk
mengosongkan data, SRAM secara otomatis menghilangkan data ketika
modul dalam keadaan off.
d. ROM Code merupakan kependekan dari Read Only Memory Code
berfungsi untuk merubah hasil perhitungan posisi dari GPS Engine
menjadi format BIT.
e. Power Management berfungsi untuk memastikan energi yang digunakan
untuk melakukan semua proses data pada Broadband Processor dapat
menyebar secara merata.
f. Backup RAM berfungsi untuk menyimpan data yang telah diproses
dengan tujuan antisipasi apabila modul berhenti bekerja secara mendadak.
g. Microprocessor berfungsi untuk mengatur dan memastikan semua fungsi
alat dalam Broadband Processor bekerja sesuai dengan perintah.
h. RTC merupakan kependekan dari Real Time Clock yang berfungsi
sebagai alat pencatat waktu secara simultan dan up to date ketika modul
GPS dijalankan.
Prinsip kerja OEM modul receiver GPS dihubungkan dengan perangkat
komputer atau sistem penyimpanan yang dilengkapi dengan sumber energi listrik
menggunakan SAW Filter dengan tujuan untuk mengaktifkan modul. Sinyal radio
GPS ditangkap oleh antenna pada RF Front End kemudian di proses pada
Broadband Processor. Data hasil pemrosesan dari Broadband Processor kemudian
disalurkan kembali ke RF Front End kemudian ke SAW Filter untuk diterima oleh
komputer atau sistem penyimpanan (ublox, 2013).
I.8.6. Sumber Kesalahan dan Bias pada Pengukuran GNSS
Selama proses pengukuran GNSS, receiver yang menerima sinyal dari satelit
merambat melalui media propagasi dan perbedaan sistem satelit-receiver. Media
propagasi dan sistem yang berbeda mempengaruhi kesalahan dan bias. Bias
didefiniskan sebagai efek-efek pada pengukuran yang menyebabkan jarak
sesungguhnya berbeda dengan jarak terukur dengan jumlah perbedaan yang
sistematis dan dimodelkan pada pengukuran dan pengolahan data (Sunantyo, 2000).

19
Sumber kesalahan pada sistem satelit-receiver antara lain kesalahan orbit
satelit, jam satelit, kesalahan jam satelit dan receiver, kesalahan antena, ambiguitas
fase, dan cycle slips. Sumber bias pada media propagasi antara lain ionosfer dan
troposfer dimana sinyal GNSS mengalami refraksi di dalamnya. Selain itu, sinyal
GNSS juga dapat dipantulkan oleh benda-benda di sekitar pengamat dan
menyebabkan efek multipath (Abidin, 2000). Sumber kesalahan dan bias tersebut di
atas dapat mengurangi ketelitian posisi yang dihasilkan oleh receiver.
1.8.6.1. Kesalahan orbit satelit. Kesalahan orbit satelit atau kesalahan
ephemeris terjadi ketika posisi orbit satelit yang terdapat dalam file broadcast
ephemeris tidak sama dengan posisi orbit satelit yang sebenarnya. Pada dasarnya
kesalahan ini dapat disebabkan oleh ketidaktelitian proses perhitungan orbit satelit
oleh stasiun-stasiun pengontrol satelit dan kesalahan dalam prediksi orbit untuk
periode waktu setelah uploading ke satelit. Besarnya kesalahan juga bergantung pada
jenis data ephemeris yang digunakan seperti Almanak, Broadcast Ephemeris, Ultra
Rapid Ephemeris, Rapid Ephemeris, dan Precise Ephemeris. Kesalahan ini dapat
mempengaruhi ketelitian posisi titik-titik yang diamat dapat menurun dikarenakan
jarak yang diu kur lebih panjang atau lebih pendek.
kesalahan orbit satelit dapat direduksi dengan berbagai cara antara lain
dengan diferensial, short baseline, perpanjang waktu pengamatan, dan menggunakan
data orbit satelit yang teliti seperti Precise Ephemeris (Rizos, 1999).
1.8.6.2. Kesalahan jam satelit dan jam receiver. Sistem waktu pada satelit
GNSS menggunakan jam atom. Jam atom tersebut sangat teliti namun masih dapat
mengalami penyimpangan seperti offset, drift, dan drift-rate. Pada umumnya receiver
GNSS dilengkapi dengan jam kristal quartz yang relatif lebih kecil, lebih murah, dan
relatif memerlukan daya yang relatif lebih kecil dibandingkan jam atom yang
digunakan di satelit (Rizos, 1999). Jam satelit dengan jam receiver dapat mengalami
perbedaan yang menyebabkan kesalahan penghitungan lama perambatan sinyal dan
jarak antara satelit dengan receiver.
1.8.6.3. Kesalahan antena. Kesalahan antena atau antenna phase center
variation terjadi ketika ada perbedaan ukuran jarak antara jarak satelit ke pusat

20
geometris antena dengan jarak satelit ke pusat fase antena. Jarak ukuran pada
pengukuran jarak dari satelit ke antena receiver GNSS diasumsikan mengacu ke
pusat geometris dari antena yang lokasinya tetap. Sebenarnya secara elektronik
pengukuran jarak tersebut mengacu ke pusat fase antena, bukan ke pusat geometris
antena. Adanya perbedaan lokasi antara pusat fase dan pusat geometris antena
menyebabkan terjadinya kesalahan pada jarak ukuran (Rizos, 1999).
1.8.6.4. Cycle slips. Cycle slips adalah kondisi terputusnya pengamatan sinyal
satelit dalam jumlah gelombang penuh dari fase gelombang pembawa yang diamati
oleh receiver karena suatu hal. Hal ini dapat terjadi karena beberapa penyebab seperti
mematikan dan menghidupkan receiver, obstruksi sinyal satelit, dinamika receiver
yang tinggi, rendahnya rasio SNR, dan receiver failure (Kaplan, 2006).
1.8.6.5. Ambiguitas fase. Ambiguitas fase adalah kondisi adanya jumlah
gelombang penuh yang tidak terukur oleh receiver GNSS saat pengukuran.
Ambiguitas fase berupa bilangan bulat kelipatan panjang gelombang. Ketidaktepatan
dalam mendefinisikan besarnya ambiguitas fase menyebabkan kesalahan penentuan
jarak dari satelit ke pengamat (Abidin, 2000). Semakin panjang baseline
menyebabkan kesalahan ambiguitas fase besar. Penentuan harga ambiguitas fase
dapat dilakukan dengan pengamatan double difference (Sunantyo, 2000).
1.8.6.6. Bias troposfer. Troposfer adalah bagian atau lapisan dari atmosfer
yang berbatasan dengan permukaan bumi dan mempunyai ketebalan setinggi 9 km
s/d 18 km tergantung pada tempat dan waktu. Ketika sinyal GNSS melalui troposfer,
akan mengalami refraksi yang menyebabkan perubahan pada kecepatan dan arah dari
sinyal GNSS. Efek utama dari refraksi troposfer adalah kesalahan terhadap hasil
ukuran jarak (Rizos, 1999). Bias troposfer dapat dieliminasi dengan cara
meminimalkan besaran zenith pengguna dan memperbesar horizon pengamatan,
pengaruh bias troposfer dapat diabaikan jika sudut satelit di bawah 20º (El-Rabbany,
2002).
1.8.6.7. Bias ionosfer. Ionosfer adalah bagian atau lapisan dari atmosfer yang
berbatasan dengan lapisan troposfer. Lapisan ionosfer terdapat pada ketinggian 50
21
km s/d 1000 km di atas permukaan bumi. Kesalahan ionosfer disebabkan oleh
keberadaan elektron-elektron bebas, molekul dan atom positif yang berterbangan di
lapisan ionosfer.
Benda-benda bertebangan tersebut menyebabkan sinyal GNSS tidak berjalan
dengan kecepatan cahaya sebagaimana di dalam ruang vakum pada saat melalui
lapisan ini. Modulasi sinyal kode dapat mengalami perlambatan (pseudorange hasil
konversi kode-kode C/A dan P lebih panjang dari semestinya), sementara fase-fase
frekuensi radio gelombang pembawa carrier L1 dan L2 mengalami percepatan
sehingga menjadi lebih pendek dari yang sebenarnya dengan besar yang sama.
Densitas dari elektron ini tidak bersifat konstan dan berubah menyesuaikan dengan
posisi bujur dari pengamat (El-Rabbany, 2002).
1.8.6.8. Multipath. Multipath adalah kondisi sinyal satelit GNSS yang tiba di
antena melalui dua atau lebih lintasan berbeda karena efek pantulan benda-benda di
sekitar pengamat seperti bangunan, jalan, dan permukaan air (Sunantyo, 2000).
Perbedaan jarak tempuh dapat menyebabkan sinyal berinterferensi ketika diterima
oleh antena sehingga menyebabkan kesalahan hasil pengamatan (Rizos, 1999).
1.8.6.9. Noise. Noise secara umum menggambarkan kekerasan, kekasaran
atau suara yang tidak diinginkan. Kebisingan tersebut lebih khusus ke sinyal listrik.
Kebisingan listrik ini mengaburkan kegunaan sinyal atau isi informasi. Pada sistem
navigasi, noise bersumber dari perangkat keras, atau perangkat elektrik yang
dihubungkan dengan perangkat keras seperti antena, receiver, atau kabel. Noise
sangat dipengaruhi oleh temperatur. Semakin panas temperatur pada perangkat keras,
maka semakin besar noise yang dihasilkan dari perangkat keras tersebut(Langley,
1997).
I.8.7. Zero Baseline Test
Zero baseline test adalah metode untuk menguji kualitas antena, receiver,
kabel dan perangkat lunak pengolahan data GNSS. Untuk menguji kualitas receiver
menggunakan dua buah receiver GNSS yang dihubungkan dengan satu buah antena
melalui splitter atau repeater. Antena yang digunakan menerima signal dari satelit
lalu dikirim ke splitter dan dibagi menuju kedua receiver. Metode akuisis data yang
22
digunakan adalah metode relatif seperti pada sub-bab 1.8.3.1. dan metode
pengolahan yang digunakan adalah metde double difference seperti pada sub-bab
1.8.4.1. Semua kesalahan umum karena multipath, noise, bias, dan lain-lain direduksi
dalam pengolahan data (Sun, dkk, 2016; Bossler, dkk, 2010 ). Hasil yang didapatkan
pada kedua receiver secara teori sama karena bersumber dari antena yang sama. Jika
terjadi perbedaan hasil berarti salah satu GNSS mengalami masalah (de Bakker, dkk,
2012).
Berikut adalah standar dalam melakukan Zero baseline Test antara lain
(Jabatan Ukur dan Pemetaan Malaysia,1999):
1. Tes dapat dilakukan di tempat yang nyaman, dilakukan di sebuah titik dengan
setidaknya 90% visibilitas langit.
2. Tes dilakukan dengan minimal sesi pengamatan selama sepuluh menit.
3. Tes dilakukan dengan interval rekaman setidaknya 15 detik.
4. Receiver melacak satelit GNSS setidaknya lima satelit selama sesi
pengamatan dengan GDOP dari kurang dari enam.
5. Elevation mask 15° diterapkan selama pengolahan baseline.
6. Jarak kemiringan yang dihasilkan antara dua receiver sedang diuji kurang
dari tiga milimeter.
Jika toleransi ini tidak terpenuhi tes harus diulang atau peralatan dikirim ke
agen GPS untuk pengujian lebih lanjut.
I.8.8. Receiver Independent Exchange (RINEX)
Format data RINEX (Receiver Independent Exchange)adalah format standar
untuk pertukaran data survey GNSS dan navigasi presisi (Gurtner dan Mader, 1990).
RINEX dikembangkan oleh Astronomical Institute of The University of Berne untuk
mengatasi kesulitan mengkombinasikan data biner dari receiver GNSS yang berbeda.
Perangkat lunak pengolah data survei GNSS umumnya dapat memberikan keluaran
dan menerima masukan dalam format RINEX. Beberapa karakteristik RINEX adalah
sebagai berikut:
1. Format ASCII, dengan panjang setiap record maksimum 80 karakter.
2. Satuan data fase adalah panjang gelombang, data pseudorange adalah meter.
3. Semua kalibrasi tergantung receiver sudah diaplikasikan ke data.

23
4. Tanda waktu adalah waktu pengamatan dalam kerangka waktu jam receiver.
5. Data pengamatan, data navigation message, dan data meteorologi diberikan
dalam file yang berbeda.
Dalam file RINEX dapat memberikan informasi untuk data code dan data
carrier phase masing-masing. RINEX memiliki beberapa jenis data antara lain
(International GNSS Service & RINEX Working, 2013):
1. File data observasi (*.YYo)
2. File pesan navigasi GPS (*.YYn)
3. File data Meteorologi (*.YYm)
4. File pesan navigasi GLONASS (*.YYg)
Dalam penelitian ini jenis data yang digunakan adalah file data observasi dan
file pesan navigasi GPS.
I.8.9. Signal to Noise Ratio (SNR)
Signal to noise ratio (SNR) adalah parameter umum yang digunakan untuk
menggambarkan kekuatan sinyal yang diamati oleh receiver GNSS. SNR mengacu
pada rasio sinyal dan noise listrik suatu bandwidth yang diberikan. Nilai parameter
ini akan tergantung pada model front-end receiver-nya, akuisisi dan pelacakan
parameter serta pengaturan instalasi pada setiap observasi. Ini akan berbeda pada
setiap tahap pemrosesan sinyal dalam receiver GNSS.
SNR merupakan fungsi dari kekuatan sinyal yang dibagi oleh kekuatan derau
atau noise. SNR biasanya dinyatakan dalam satuan desibel. Kekuatan sinyal
didefinisikan dalam satuan daya pada umumnya yaitu watts atau milliwatts. Kondisi
tersebut dapat dibuat persamaan pada persamaan I.19. namun jiga kekuatan sinyal
sudah dalam satuan decibel seperti dBW atau dBm maka dapat dibuat persamaan
seperti persamaan I.20 (Northwood Labs LLC, 2003):
(
).................................................................................................(I.19)
..........................................................................................(I.20)
Dalam hal ini :
SNR : Signal to Noise Ratio
S : kekuatan sinyal,
N : kekuatan suara dalam bandwidth yang diberikan.
24
I.8.10. Observed Range Deviation (ORD)
Observed Range Deviation (ORD) didefinisikan sebagai perbedaan antara
pseudorange yang diamati dan yang diperkirakan atau diperhitungkan (Bradford W.,
dkk. 1996). Pada beberapa receiver GNSS, efek yang paling signifikan untuk
memperhitungkan koreksi rentang pengamatan (beda waktu) adalah jam receiver
offset (perbedaan antara waktu internal penerima dan waktu GNSS yang benar).
Menurut Feess B., dkk. (1987) ORD dapat dirummuskan sebagai berikut:
ORD = PRobs – PRcomp (I.21)
ORD = PRobs – [R + c(фreceiver – фsv)] (I.22)
Dalam hal ini:
PRobs : Pseudorange diamat oleh receiver yang terkoreksi dari kesalahan ionosfer,
dan troposfer.
PRcomp : Pseudorange terhitung untuk receiver
R : Jarak geometris dari Satelit ke receiver
c : Kecepatan cahaya
фreceiver : Offset Jam Satelit terhadap waktu GPS yang terdapat di data navigasi
фsv : Offset Jam Receiver terhadap waktu GPS
ORD adalah salah satu tool pada perangkat lunak GPSTk. Beberapa fungsi
perintah pada ORD antara lain ordClock membuat perkiraan jam receiver offset,
ordLinEst untuk menghitung perkiraan model jam secara linear dan juga menghitung
nilai penyimpangan model (jam residual), ordStats meringkas statistik kesalahan
yang berisi rentang elevasi, standar deviasi, rata-rata dan nilai maksimum dari ORD
yang terdaftar, serta jumlah observasi dan jumlah kesalahan, ordPlot merencanakan
ORD, offset jam, model jam linear dan model jam residual.
I.8.11. Standar yang Digunakan untuk Evaluasi Kemampuan Pengukuran Code
dan Carrier Phase OEM Modul Receiver GPS
1.8.11.1. Standar nilai SNR receiver geodetik berdasarkan penelitian Langley
(1997). Penelitian yang dilakukan oleh Langley (1997), mengarakteristikkan nilai
SNR melalui data pengamatan dibeberapa stasiun pengamatan GPS. Dalam bukunya,
Langley mengatakan bahwa nilai SNR yang diberikan melalui nilai C/N0 yang
dayanya ditransmisikan oleh satelit GPS berkisar pada 42 dBHz. Pernyataan Langley
25
tersebut digunakan sebagai referensi oleh Bilich untuk melakukan penelitian dalam
tingkat thesis pada tahun 2006. Bilich menambahkan nilai SNR receiver geodetik
berada pada rentang 35 dBHz s.d. 50 dBHz.
1.8.11.2. Standar nilai ORD receiver geodetik berdasarkan penelitian Standar
Positioning Service Performance Standard GPS (SPS-PS GPS) (2008). Standar ini
dipublikasikan oleh Departemen Pertahanan, Amerika Serikat pada tahun 2008.
Standar yang memuat tentang berbagai prosedur performa penentuan posisi
menggunakan GPS ditulis dalam dokumen tersebut. Salah satu standar yang ada
adalah standar pengukuran code oleh receiver geodetik. Standar tersebut menyatakan
bahwa akurasi hasil pengukuran pseudorange atau nilai ORD sebesar lebih kurang
7,8 m sebanyak 95% dari 100% data pengukuran. Nilai 95% merupakan tingkat
kepercayaan yang digunakan yang berarti tingkat kepastian sampel estimasi dengan
benar sebesar 95%.
1.8.11.3. Standar nilai residual carrier phase receiver geodetik berdasarkan
Muravchik (2005). Standar nilai residual carrier phase receiver geodetik mengacu
kepada penelitian yang dilakukan oleh Muravchik, dkk. pada tahun 2005.
Muravchik, dkk. melakukan penelitian dengan menggunakan metode differencing
dan menghilangkan serta mengurangi kesalahan yang ada untuk menentukan besaran
nilai residual carrier phase receiver geodetik. Muravchik, dkk. mengatakan bahwa
nilai standar residual carrier phase untuk receiver geodetik adalah sebesar ±8,8 mm.
I.8.12. Perangkat lunak RTKLIB
RTKLIB adalah perangkat lunak open source untuk penentuan posisi
dengan GNSS secara standar dan presisi. RTKLIB terdiri dari sebuah program
library portable. Perangkat lunak ini dapat melakukan pemrosesan data secara cepat
dan dapat diintegrasikan secara post processing maupun real time. Beberapa fitur
dari RTKLIB adalah
1. Dapat menjalankan algoritma penentuan posisi secara presisi seperti GPS,
GLONASS, Galileo, dan lain-lain;
2. Dapat melakukan pengamatan untuk post processing maupun real time;

26
3. Dapat mengolah beberapa format dan protokol GNSS seperti RINEX,
RTCM, RTCA, NMEA, dan lain-lain;
4. Dapat menggunakan beberapa receiver GNSS seperti NovAtel, Hemisphere,
U-blox, Skytraq, JAVAD, dan lain-lain.
I.8.13. Perangkat lunak GPSTk
Perangkat lunak GPSTk atau Toolkit GPS adalah perangkat lunak open
source yang dibuat oleh University of Texas, Austin dan dirilis oleh Lesser GNU
Public License. GPSTk terdiri dari library dan aplikasi yang mendukung penelitian
GPS, analisis, dan pengembangan. GPSTk mendukung berbagai fungsi termasuk
membaca dan menulis pengamatan dalam format standar, seperti RINEX, Binex, dan
SP3, evaluasi ephemeris, penentuan posisi, integritas otonom penerima pemantauan ,
pemodelan penundaan atmosfer, cycle slips dan koreksi, dan generasi P-code.
I.9. Hipotesis
Berdasarkan penelitian sebelumnya yang telah diulas dalam tinjauan pustaka
dan teori yang telah diulas dalam landasan teori, hipotesis awal pada penelitian ini
antara lain:
1. Kemampuan pelacakan satelit oleh OEM modul receiver GPS setara dengan
kemampuan receiver geodetik yang dibuktikan oleh nilai rata-rata SNR yang
didapat kurang dari 45 dBHz, dan masih berada dalam rentang nilai SNR secara
umum pada receiver geodetik.
2. Kemampuan pengukuran pseudorange oleh OEM modul receiver GPS setara
dengan kemampuan receiver geodetik yang dibuktikan oleh sebanyak 95% nilai
ORD sesuai dengan standar receiver geodetik yaitu ± 7,8 m.
3. Kemampuan pengukuran carrier phase oleh OEM modul receiver GPS setara
dengan kemampuan receiver geodetik yang dibuktikan oleh nilai residual carrier
phase yang didapat bervariasi pada ± 8,8 mm.