Download - Mi Kro Kontrol Er
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2.4. Mikrokontroler
2.4.1.Pengertian Mikrokontroler
Mikrokotroller adalah suatu alat elektronika digital yang mempunyai
masukan dan keluaran serta kendali dengan program yangbisa ditulis dan dihapus
dengan cara khusus, cara kerja mikrokontroller sebenarnya membaca dan menulis
data, biasanya terdiri dari:
1. CPU (Central Processing Unit)
2. RAM (Random Access Memory)
3. EEPROM/EPROM/PROM/ROM
4. I/O, Serial &Parallel.
5. Timer
6. Interupt Controller
Gambar 2.163 Mikrokontroller
2.4.2.Jenis-Jenis Dan Bagian-Bagian Mikrokontroler
a. Mikrokontroler AVR
Merupakan mikrokontroler dengna arsitektur modern. Terdapat 3
macam atau jenis mikrokontroler AVR, yaitu :
- Tiny AVR
- AVR atau Classic AVR,dan
- Mega AVR
Perbedaan jenis-jenis tersebut terletak dari fasilitas, atau lebih
dikenal dengan fitur-fiturnya. Jenis TinyAVR merupkan mikrokontroler
dengan jumlah pin yang terbatas dan sekaligus fitur-fiturnya juga terbatas
KELOMPOK XII 1
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
dibandingkan dengan megaAVR. Semua mikrokontroler AVR memiliki
set instruksi (assembly) dan organisasi yang sama.
Mikrokontroler Alv, dan Vegard’s risc Processor atau yang
disingkat AVR merupakan mikrokontroler RISC 8 bit, karena RISC
inilah sebagian besar kode instruksinya dikemas dalam satu siklus clock.
AVR adalah jenis mikrokontroler yang paling sering dipakai dalam
bidang elektronika dan instrumentasi.
b. Mikrokontroler MCS-51
Mikrokontroler MCS-51 adalah mikrokontroler yang paling
populer saat ini. Keluarga ini diawali oleh Intel yang mengenalkan IC
Mikrokontroler tipe 8051 pada awal tahun 1980-an, 8051 termasuk
sederhana dan harganya murah sehingga banyak digemari, dan banyak
pabrik IC besar lain yang ikut memproduksinya.
c. Mikrokontroler PIC
Mikrokontroler PIC adalah salah satu jenis mikrokontroler yang
diproduksi oleh microchip, inc. Untuk mengontrol alat di sekeliling,
sehingga mengurangi beban CPU utama.
PIC 18f452, sama seperti CPU, memiliki fungsi kalkulasi dan serta
dikendalikan oleh software. Bagaimanapun PIC memiliki kapasitas
memori yang kecil. Frekuensi kerja maksimum clock untuk
mikrokontroler PIC adalah sekitar 1k sampai dengan 4k. Frekuensi clock
dapat menentukan kecepatan membaca suatu program dan sebuah
intstruksi dieksekusi atau dijalankan.
KELOMPOK XII 2
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
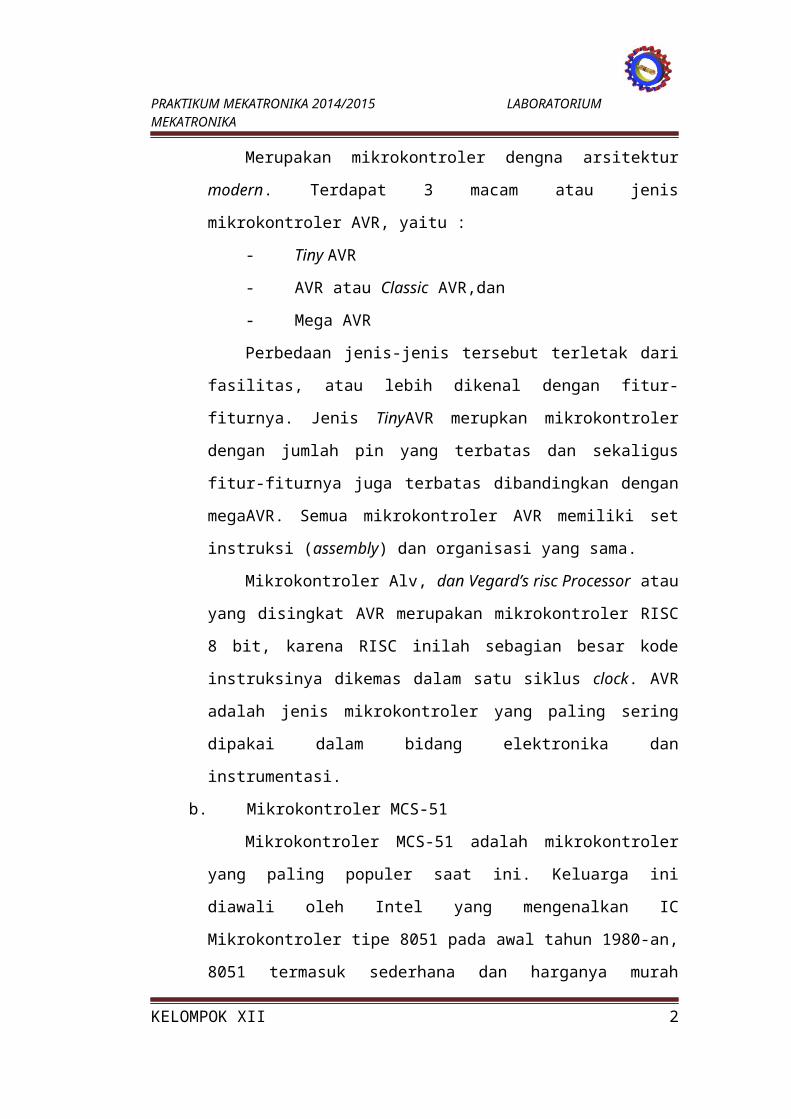
Bagian Mikrokontroler,
Gambar : Bagian Mikro kontroler
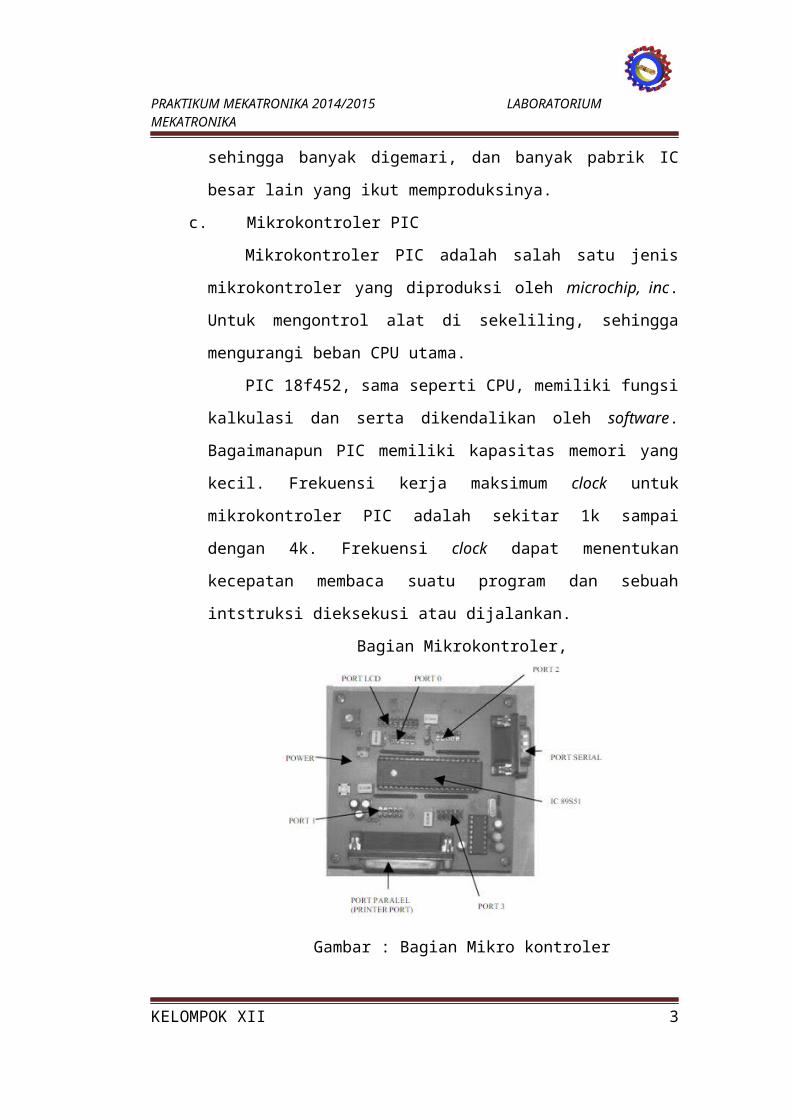
Gambar : Diagram blok mikrokontroler umum
2.4.3.Fitur mikrokontroler AT89s51, Atmega 8535, Arduino dan sebutkan
aplikasi dari mikrokontroler
a. AT89s51
Adapun fitur yang dimiliki Mikrokontroler AT89S51 adalah sebagai
berikut:
1. Sebuah CPU (Central Processing Unit) 8 bit yang termasuk keluarga
MCS51.
2. 2. Osilator internal dan rangkaian pewaktu, RAM internal 128 byte (on
chip).
KELOMPOK XII 3
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
3. Empat buah Programmable port I/O,masing-masing terdiri atas 8 jalur
I/O
4. Dua buah Timer Counter 16 bit.
5. Lima buah jalur interupsi (2 interupsi external dan 3 interupsi internal )
6. Sebuah port serial dengan kontrol serial full duplex UART.
7. Kemampuan melaksanakan operasi perkalian, pembagian dan operasi
Boolean (bit)
8. Kecepatan pelaksanaan instruksi per siklus 1 microdetik pada frekuensi
clock 12 MHz
9. 4 Kbytes Flash ROM yang dapat diisi dan dihapus sampai 1000 kali
10. In-System Programmable Flash Memory
Dengan keistimewaan diatas, pembuatan alat menggunakan AT89S51
menjadi lebih sederhana dan tidak memerlukan IC pendukung yang banyak.
Sehingga mikrokontroler AT89S51 ini mempunyai keistimewaan dari segi
perangkat keras. Adapun blok diagram dari mikrokontroler 89S51
diperlihatkan pada Gambar 1.1.
b. Atmega 8535
Adapun kapabilitas detail dari ATmega8535 adalah sebagai berikut,
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte,
dan EEPROM (Electrically Erasable Programmable Read Only Memori)
sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep untuk menghemat penggunaan daya listrik.
KELOMPOK XII 4
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
c. Arduino
Board Arduino Uno memiliki fitur – fitur baru sebagai berikut :
1. pinout : menambahkan SDA dan SCL pin yang deket ke pin aref dan
dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan I/O REF
yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan
yang disediakan dari board sistem. Pengembangannya, sistem akan
lebih kompatibel dengan prosesor yang menggunakan AVR, yang
beroperasi dengan 5V dan dengan Arduino karena beroperasi dengan
3,3V. Yang kedua adalah pin yang tidak terhubung, yang disediakan
untuk tujuan pengembangannya.
2. Sirkuit reset
3. ATMega 16U2 ganti 8U yang digunakan sebagai konverter USB-to-
serial.
2.4.4.Rangkaian minimum AT89s51 dan Atmega 8535, Arduino dan fungsi
setiap pin
a. AT89s51
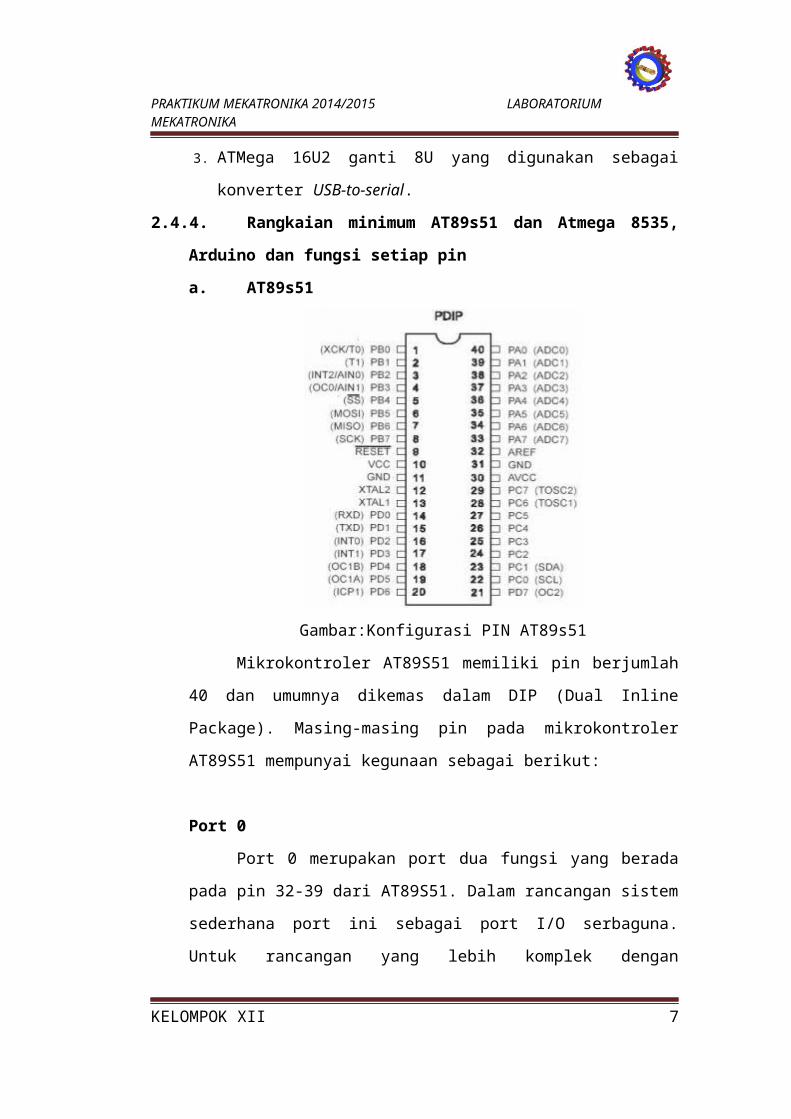
Gambar:Konfigurasi PIN AT89s51
Mikrokontroler AT89S51 memiliki pin berjumlah 40 dan umumnya
dikemas dalam DIP (Dual Inline Package). Masing-masing pin pada
mikrokontroler AT89S51 mempunyai kegunaan sebagai berikut:
KELOMPOK XII 5
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Port 0
Port 0 merupakan port dua fungsi yang berada pada pin 32-39 dari
AT89S51. Dalam rancangan sistem sederhana port ini sebagai port I/O
serbaguna. Untuk rancangan yang lebih komplek dengan melibatkan
memori eksternal jalur ini dimultiplek untuk bus data dan bus alamat.
Port 1
Port 1 disediakan sebagai port I/O dan berada pada pin 1-8.
Beberapa pin pada port ini memiliki fungsi khusus yaitu P1.5 (MOSI), P1.6
(MISO), P1.7 (SCK) yang digunakan untuk jalur download program.
Port 2
Port 2 ( pin 21-28 ) merupakan port dua fungsi yaitu sebagai I/O
serbaguna, atau sebagai bus alamat byte tinggi untuk rancangan yang
melibatkan memori eksternal.
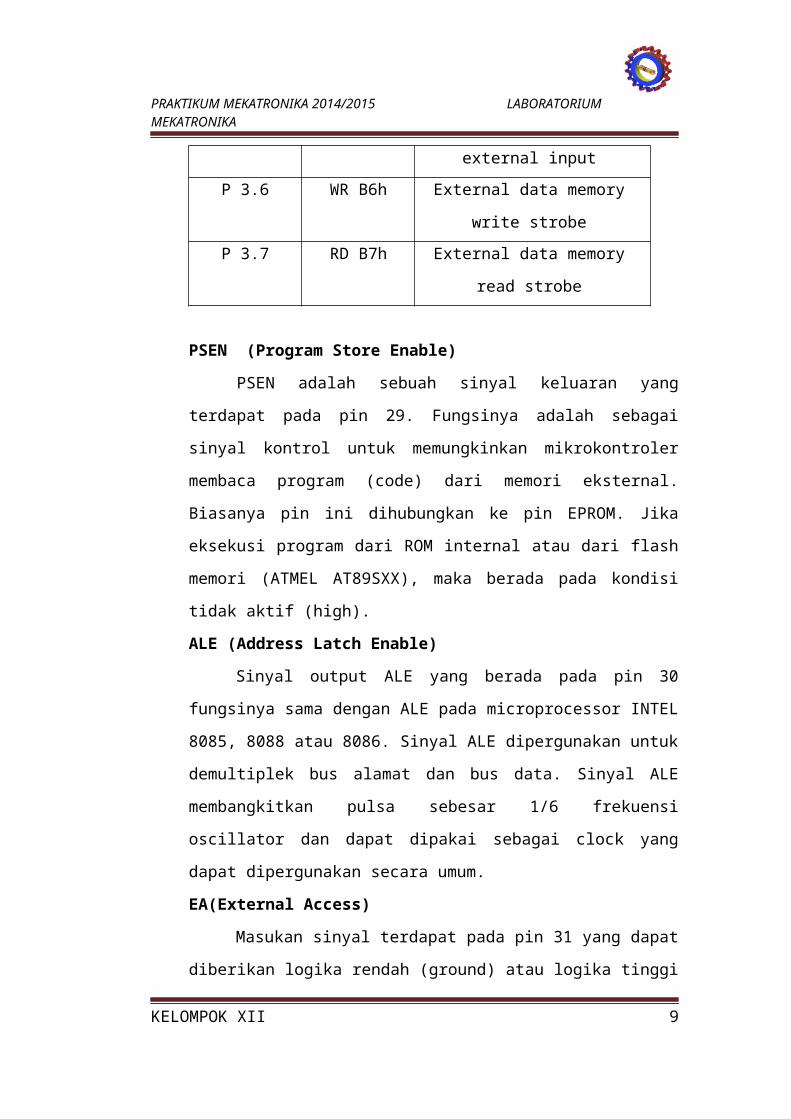
Port 3
Port 3 adalah port dua fungsi yang berada pada pin 10-17, port ini
memiliki multi fungsi, seperti yang terdapat pada tabel 1.1 berikut ini :
BIT NAME BIT ADRESS ALTERNATE FUNCTION
P 3.0 RXD B0h Receiver data for serial port
P 3.1 TXD B1h Transmit data for serial port
P 3.2 INT0 B2h External interrupt 0
P 3.3 INT1 B3h External interrupt 1
P 3.4 T0 B4h Timer/counter 0 external input
P 3.5 T1 B5h Timer/counter 1 external input
P 3.6 WR B6h External data memory write strobe
P 3.7 RD B7h External data memory read strobe
PSEN (Program Store Enable)
PSEN adalah sebuah sinyal keluaran yang terdapat pada pin 29.
Fungsinya adalah sebagai sinyal kontrol untuk memungkinkan
mikrokontroler membaca program (code) dari memori eksternal. Biasanya
pin ini dihubungkan ke pin EPROM. Jika eksekusi program dari ROM
KELOMPOK XII 6
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
internal atau dari flash memori (ATMEL AT89SXX), maka berada pada
kondisi tidak aktif (high).
ALE (Address Latch Enable)
Sinyal output ALE yang berada pada pin 30 fungsinya sama dengan
ALE pada microprocessor INTEL 8085, 8088 atau 8086. Sinyal ALE
dipergunakan untuk demultiplek bus alamat dan bus data. Sinyal ALE
membangkitkan pulsa sebesar 1/6 frekuensi oscillator dan dapat dipakai
sebagai clock yang dapat dipergunakan secara umum.
EA(External Access)
Masukan sinyal terdapat pada pin 31 yang dapat diberikan logika
rendah (ground) atau logika tinggi (+5V). Jika diberikan logika tinggi maka
mikrokontroler akan mengakses program dari ROM internal (EPROM/flash
memori). Jika diberi logika rendah maka mikrokontroler akan mengakses
program dari memori eksternal.
RST (Reset)
Input reset pada pin 9 adalah reset master untuk AT89S51. Pulsa
transisi dari tinggi selama 2 siklus ke rendah akan mereset mikrokontroler.
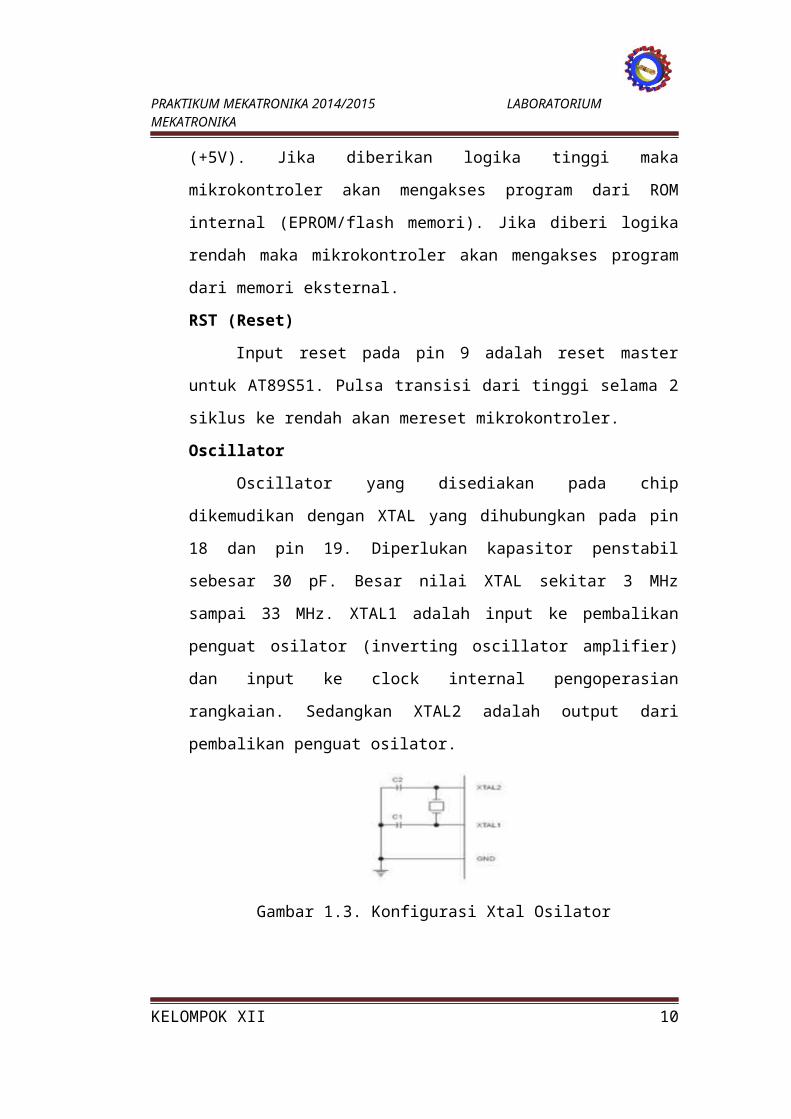
Oscillator
Oscillator yang disediakan pada chip dikemudikan dengan XTAL
yang dihubungkan pada pin 18 dan pin 19. Diperlukan kapasitor penstabil
sebesar 30 pF. Besar nilai XTAL sekitar 3 MHz sampai 33 MHz. XTAL1
adalah input ke pembalikan penguat osilator (inverting oscillator amplifier)
dan input ke clock internal pengoperasian rangkaian. Sedangkan XTAL2
adalah output dari pembalikan penguat osilator.
Gambar 1.3. Konfigurasi Xtal Osilator
KELOMPOK XII 7
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Power
AT89S51 dioperasikan pada tegangan supply +5v, pin Vcc berada
pada nomor 40 dan Vss (ground) pada pin 20.
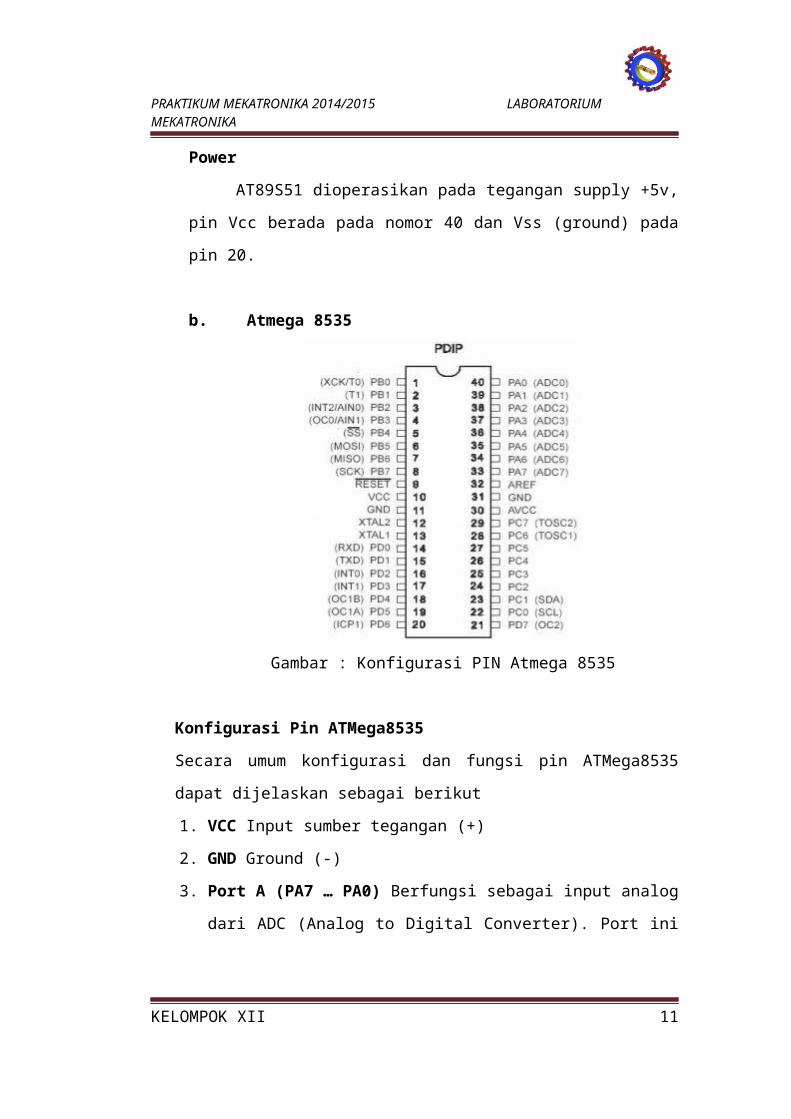
b. Atmega 8535
Gambar : Konfigurasi PIN Atmega 8535
Konfigurasi Pin ATMega8535
Secara umum konfigurasi dan fungsi pin ATMega8535 dapat dijelaskan
sebagai berikut
1. VCC Input sumber tegangan (+)
2. GND Ground (-)
3. Port A (PA7 … PA0) Berfungsi sebagai input analog dari ADC (Analog
to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah,
jika ADC tidak digunakan.
4. Port B (PB7 … PB0) Berfungsi sebagai port I/O dua arah. Port PB5,
PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang
dipergunakan pada proses downloading. Fungsi lain port ini
selengkapnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”.
KELOMPOK XII 8
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
5. Port C (PC7 … PC0) Berfungsi sebagai port I/O dua arah. Fungsi lain
port ini selengk apnya bisa dibaca pada buku petunjuk ”AVR
ATMega8535”.
6. Port D (PD7 … PD0) Berfungsi sebagai port I/O dua arah. Port PD0 dan
PD1 juga berfungsi sebagai RXD dan TXD, yang dipergunakan untuk
komunikasi serial. Fungsi lain port ini selengkapnya bisa dibaca pad a
buku petunjuk ”AVR ATMega8535”.
7. RESET Input reset.
8. XTAL1 Input ke amplifier inverting osilator dan input ke sirkuit clock
internal.
9. XTAL2 Output dari amplifier inverting osilator.
10. AVCC Input tegangan untuk Port A dan ADC.
11. AREF Tegangan referensi untuk ADC.
c. Arduino
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu
daya eksternal. Sumber listrik dipilih secara otomatis. Eksternal (non-
USB) daya dapat berupa baik AC-DC adaptor atau baterai. Adaptor ini
dapat dihubungkan dengan cara menghubungkan plug pusat – positif
2.1mm ke dalam board colokan listrik. Sedangkan untuk baterai dapat
dihubungkan kedalam header pin GND dan Vin dari konektor Power.
KELOMPOK XII 9
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Board dapat beroperasi pada pasokan daya dari 6 – 20 volt. Jika
diberikan dengan kurang dari 7V, bagaimanapun, pin 5V dapat
menyeluplai kurang dari 5 volt dan board mungkin tidak stabil. Jika
menggunakan lebih dari 12V, regulator bisa panas dan merusak board.
Rentang yang dianjurkan adalah 7V – 12V. Selain itu,
beberapa pin memiliki fungsi khusus :
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan
mengirim (TX) data TTL serial. Pin ini terhubung ke pin yang sesuai
dari chip ATMega8U2 USB-to-Serial TTL.
Eksternal Interupsi : 2 dan 3. Pin ini dapat dapat dikonfigurasi untuk
memicu interupsi pada nilai yang rendah, tepi naik atau jatuh, atau
perubahan nilai. Lihat attchInterrupt() fungsi untuk rincian.
PWM : 3,5,6,9,10, dan 11. Menyediakan 8-bit output PWM
dengan analogWrite() fungsi.
SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mendukung
komunikasi SPI menggunakan librarySPI.
LED : 13. Ada built-in LED terhubung ke pin digital 13.
Ketika pin adalah nilai TINGGI. LED menyala, ketika pin adalah
RENDAH, itu off.
Arduino Uno R3 memiliki 6 input analog diberi label A0 sampai A5,
masing – masing menyediakan 10-bit resolusi (yaitu 1024 nilai yang
berbeda). Secara default sistem mengukur dari ground sampai 5 volt,
meskipun mungkin untuk mengubah ujung atas rentang
mengunakan pin AREF dan fungsi analogReference(). Selain itu,
beberapapin memiliki fungsi khusus :
TWI : A4 atau SDA pin dan A5 atau SCL pin. Mendukung
komunikasi TWI
AREF : Referensi tegangan untuk input analog. Digunakan dengan
analogReference()
RESET
2.4.5.Pengertian Interface
KELOMPOK XII 10
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Antarmuka (Interface) merupakan mekanisme komunikasi antara
pengguna (user) dengan sistem. Antarmuka (Interface) dapat menerima
informasi dari pengguna (user) dan memberikan informasi kepada pengguna
(user) untuk membantu mengarahkan alur penelusuran masalah sampai
ditemukan suatu solusi.
Interface, berfungsi untuk menginput pengetahuan baru ke dalam
basis pengetahuan sistem pakar (ES), menampilkan penjelasan sistem dan
memberikan panduan pemakaian sistem secara menyeluruh / step by step
sehingga pengguna mengerti apa yang akan dilakukan terhadap suatu
sistem. Yang terpenting adalah kemudahan dalam memakai / menjalankan
sistem, interaktif, komunikatif, sedangkan kesulitan dalam
mengembangkan/membangun suatu program jangan terlalu diperlihatkan.
Interface yang ada untuk berbagai sistem, dan menyediakan cara :
Input, memungkinkan pengguna untuk memanipulasi sistem.
Output, memungkinkan sistem untuk menunjukkan efek manipulasi
pengguna.
Tujuan sebuah interface adalah mengkomunikasikan fitur-fitur sistem
yang tersedia agar user mengerti dan dapat menggunakan sistem tersebut.
Dalam hal ini penggunaan bahasa amat efektif untuk membantu pengertian,
karena bahasa merupakan alat tertua (barangkali kedua tertua setelah
gesture) yang dipakai orang untuk berkomunikasi sehari-harinya. Praktis,
semua pengguna komputer dan Internet (kecuali mungkin anak kecil yang
memakai komputer untuk belajar membaca) dapat mengerti tulisan.
Interface ada dua jenis, yaitu :
Graphical Interface : Menggunakan unsur-unsur multimedia (seperti
gambar, suara, video) untuk berinteraksi dengan pengguna.
Text-Based : Menggunakan syntax/rumus yang sudah ditentukan untuk
memberikan perintah.
KELOMPOK XII 11







