bab ii tinjauan pustaka 2.1 tuning -...
TRANSCRIPT
4
BAB II
TINJAUAN PUSTAKA
2.1 Tuning
Tuning merupakan proses menentukan frekuensi standar dan
menyelaraskan frekuensi antar senar pada alat musik berdawai, contohnya gitar.
Pada proses ini dilakukan dengan mengatur ketegangan senar melalui pemutar
(tuning machine) yang ada di kepala (head) gitar. Tuning standar pada gitar yaitu
E-A-D-G-B-E, untuk mendapatkan frekuensi yang standar misalnya A dapat
dijadikan patokan sebuah garpu tala A atau dengan alat musik lain. (Ramdhani,
2012).
2.2 Tuner Gitar Elektronik (Penala)
Tuner gitar elektronik adalah perangkat elektronik yang menginstruksikan
Anda apakah nada perlu dinaikkan atau diturunkan. Metode ini adalah cara yang
paling akurat untuk menyetem gitar, terutama bagi pemula. setiap tuner listrik
dioperasikan secara berbeda, sehingga Anda harus memeriksa instruksi yang
datang dengan tuner anda. (Schmunk, and Stoubis, 2010).
2.3 Gitar
2.3.1 Pengertian Gitar
Gitar adalah alat musik yang memiliki dawai (senar) dan dapat dibunyikan
dengan cara dipetik atau digenjreng. Bunyi yang dihasilkan gitar berasal dari
getaran dawai. (Asriadi, 2011)
5
2.3.2 Jenis Gitar
Pada dasarnya gitar memiliki dua jenis, yaitu gitar elektrik dan gitar akustik. Kedua
gitar ini memiliki fungsi yang sama, tapi memiliki perbedaan pada karakter dan bagiannya.
a) Gitar akustik
Gitar akustik adalah jenis gitar yang suaranya dihasilkan dari getaran senar gitar yang
dialirkan melalui sadel dan jembatan tempat pengikat senar kedalam ruang suara. Suara
didalam ruangan suara ini akan beresonasi terhadap kayu badan gitar. Jenis kayu yang
digunakan akan mempengaruhi suara yang dihasilkan oleh gitar akustik tersebut. (Asriadi,
2011).
1. Gitar Akustik String
Adalah gitar akustik yang menggunakan bahan string atau logam sepeti nikel atau baja.
Biasanya ukuran lebar papan jari(finger board) lebih kecil atau sama dengan gitar elektrik.
(Asriadi, 2011).
2. Gitar Akustik Nilon
Adalah gitar akustik yang senar 1,2 dan 3 menggunakan senar dari bahan nilon. Biasanya
ukuran dan lebar papan jari lebih lebar dari gitar akustik string. Gitar ini biasa dikenal dengan
istilah gitar klasik, karena sering digunakan untuk memainkan lagu-lagu bergenre klasik.
(Asriadi, 2011).
3. Gitar Akustik Elektrik
Adalah gitar akustik string atau nilon yang bisa juga menggunakan elektrik atau pick-up
sebagai pembangkit suaranya, dan memiliki lubang jack seperti gitar elektrik. Gitar ini bisa
digunakan secara akustik atau secara elektrik dengan menggunakan pick up dan aplifier.
(Asriadi, 2011).
6
b) Gitar Elektrik
Gitar elektrik adalah jenis gitar yag menggunakan beberapa pick up untuk mengubah
bunyi getaran dari senar gitar menjadi arus listrik, lalu akan dikuatkan kembali dengan
menggunakan seperangkan amplifier dan loud speaker. Bunyi yang dihasilkan dari getaran
senar gitar akan mengenai kumparan yang ada di badan gitar biasanya disebut pick up.
Terkadang sinyal yang keluar dari pick up diubah secara elektrinik dengan menggunakan
guitar effect, sehingga suara yang dihasilkan manjadi lebih kuat dan lebih beragam karakter
suara yang muncul. (Asriadi, 2011).
2.3.4 Akor
Akor adalah beberapa nada yang dibunyikan secara bersamaan. Akor berasal dari
tangga nada diatonis, dan mengambil sesuai dengan ketentuannya. Akor pada dasarnya
menggunakan tiga nada, yaitu nada ke-1(Do), nada ke-3 (Mi), dan nada ke-5 (Sol), sesuai
dengan tangga nada diatonis yang digunakan menurut nada dasarnya. (Asriadi, 2011).
2.3.5 Susunan Nada Pada Gitar
Gitar adalah sebuah instrumen transposing, dimana suara titinadanya satu oktaf lebih
rendah dari yang tertulis pada skor/lembaran musiknya. Berbagai variasi setem dapat saja
digunakan, tergantung dari pemainnya. Setem yang paling umum digunakan yang dikenal
sebagai "Standard Tuning" menggunakan senar yang disetem dari E rendah ke E tinggi,
dengan melintasi rentang dua oktaf (EADGBe). Jika keenam senar dibunyikan secara terbuka
(open string) maka akan menghasilkan chord Em7/add11. (Sumber:
http://id.wikipedia.org/wiki/Gitar)
7
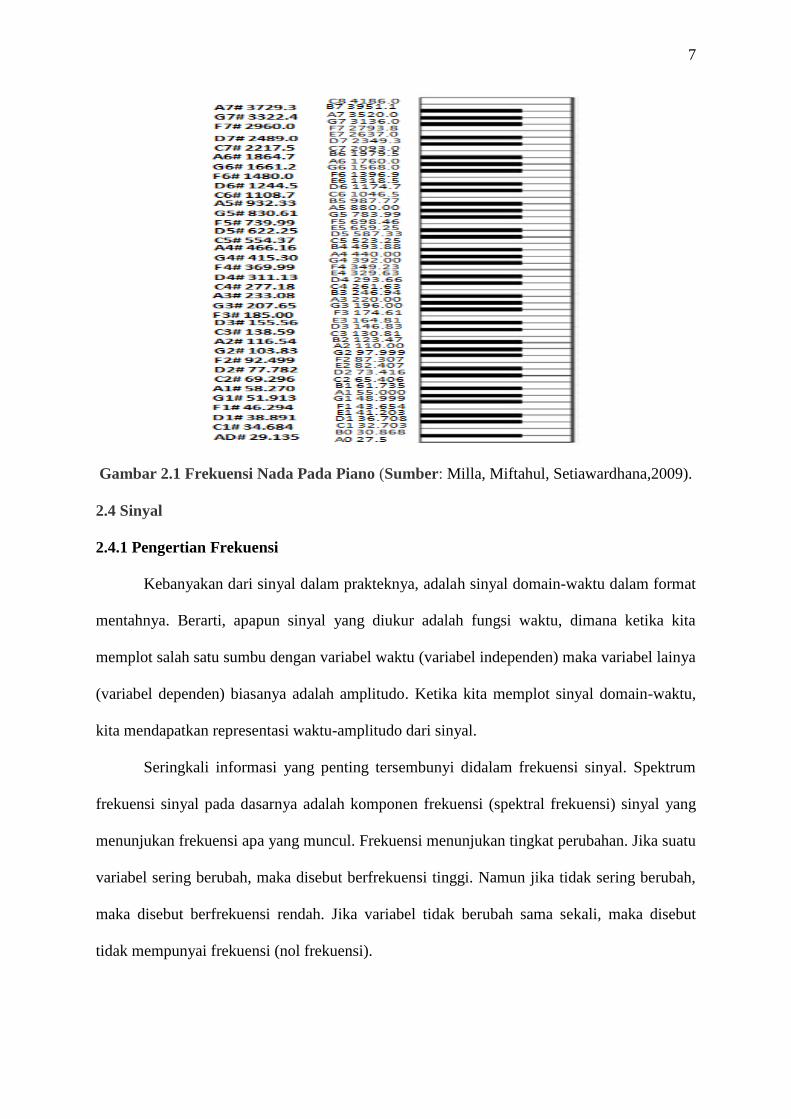
Gambar 2.1 Frekuensi Nada Pada Piano (Sumber: Milla, Miftahul, Setiawardhana,2009).
2.4 Sinyal
2.4.1 Pengertian Frekuensi
Kebanyakan dari sinyal dalam prakteknya, adalah sinyal domain-waktu dalam format
mentahnya. Berarti, apapun sinyal yang diukur adalah fungsi waktu, dimana ketika kita
memplot salah satu sumbu dengan variabel waktu (variabel independen) maka variabel lainya
(variabel dependen) biasanya adalah amplitudo. Ketika kita memplot sinyal domain-waktu,
kita mendapatkan representasi waktu-amplitudo dari sinyal.
Seringkali informasi yang penting tersembunyi didalam frekuensi sinyal. Spektrum
frekuensi sinyal pada dasarnya adalah komponen frekuensi (spektral frekuensi) sinyal yang
menunjukan frekuensi apa yang muncul. Frekuensi menunjukan tingkat perubahan. Jika suatu
variabel sering berubah, maka disebut berfrekuensi tinggi. Namun jika tidak sering berubah,
maka disebut berfrekuensi rendah. Jika variabel tidak berubah sama sekali, maka disebut
tidak mempunyai frekuensi (nol frekuensi).
8
Frekuensi diukur dalam satuan detik atau Hertz (Hz). Gambar berikut menunjukkan
contoh gelombang sinus berfrekuensi 3 Hz, 10 Hz dan 50 Hz.
Gambar 2.2 Sinyal gelombang sinus frekuensi 3 Hz
(Sumber : http://library.binus.ac.id/Collections/Download/eColls/eThesis/Bab2/2007-2-
00553%20%20Bab%20II.pdf)
Gambar 2.3 Sinyal gelombang sinus frekuensi 10 Hz
(Sumber http://library.binus.ac.id/Collections/Download/eColls/eThesis/Bab2 /2007-2-
00553%20%20Bab%20II.pdf)
Gambar 2.4 Sinyal gelombang sinus frekuensi 50 Hz
(Sumber : http://library.binus.ac.id/Collections/Download/eColls/eThesis/Bab2 /2007-2-
00553%20%20Bab%20II.pdf)
9
2.4.2 Sinyal analog
Sinyal analog adalah sinyal data dalam bentuk gelombang yang kontinyu, yang
membawa informasi dengan mengubah karakteristik gelombang. Dua parameter
/karakteristik terpenting yang dimiliki oleh isyarat analog adalah amplitude dan
frekuensi.Isyarat analog biasanya dinyatakan dengan gelombang sinus, mengingat gelombang
sinus merupakan dasar untuk semua bentuk isyarat analog. (Sumber:
http://www.scribd.com/doc/130703457/Pengertian-Sinyal-Analog).
Gambar 2.5 Sinyal Analog
(Sumber : http://www.rpi.edu/dept/phys/ScIT/InformationTransfer/sigtransfer
/signalcharacteristics.html)
Gelombang pada sinyal analog yang umumnya berbentuk gelombang sinus memiliki tiga
variable dasar, yaitu amplitudo, frekuensi dan phase.
Amplitudo merupakan ukuran tinggi rendahnya tegangan dari sinyal analog.
Frekuensi adalah jumlah gelombang sinyal analog dalam satuan detik.
Phase adalah besar sudut dari sinyal analog pada saat tertentu.
2.4.3 Sinyal Digital
Sinyal digital merupakan sinyal data dalam bentuk pulsa yang dapat mengalami
perubahan yang tiba-tiba dan mempunyai besaran 0 dan 1. Teknologi Sinyal digital hanya
memiliki dua keadaan, yaitu 0 dan 1, sehingga tidak mudah terpengaruh oleh derau/noise,

10
tetapi transmisi dengan sinyal digital hanya mencapai jarak jangkau pengiriman data yang
relatif dekat.
Gambar 2.6 Sinyal Digital
(Sumber : http://www.rpi.edu/dept/phys/ScIT/InformationTransfer/sigtransfer
/signalcharacteristics.html)
Sistem Sinyal Digital merupakan bentuk sampling dari sytem analog. digital pada dasarnya
dicode-kan dalam bentuk biner (atau Hexa). besarnya nilai suatu system digital dibatasi oleh
lebarnya / jumlah bit (bandwidth). jumlah bit juga sangat mempengaruhi nilai akurasi system
digital. (Sumber: http://www.scribd.com /doc/130703457/Pengertian-Sinyal-Analog).
2.4.4 Sinyal Stationer
Sinyal stationer adalah sinyal yang isi frekuensinya tidak berubah dari waktu ke
waktu. Dengan demikian, informasi mengenai waktu kemunculan komponen frekuensi tidak
diperlukan, karena semua komponen frekuensi muncul di setiap waktu. Contoh : sinyal x(t) =
cos(2*∏*10*t) + cos(2*∏*25*t) + cos(2*∏*50*t) + cos(2*∏*100*t) adalah sinyal stationer
karena memiliki frekuensi 10, 25, 50 dan 100 Hz di setiap waktu. (Sumber:
http://library.binus.ac.id/Collections/ Download/eColls/eThesis/Bab2/2007-2-
00553%20%20Bab%20II.pdf)
11
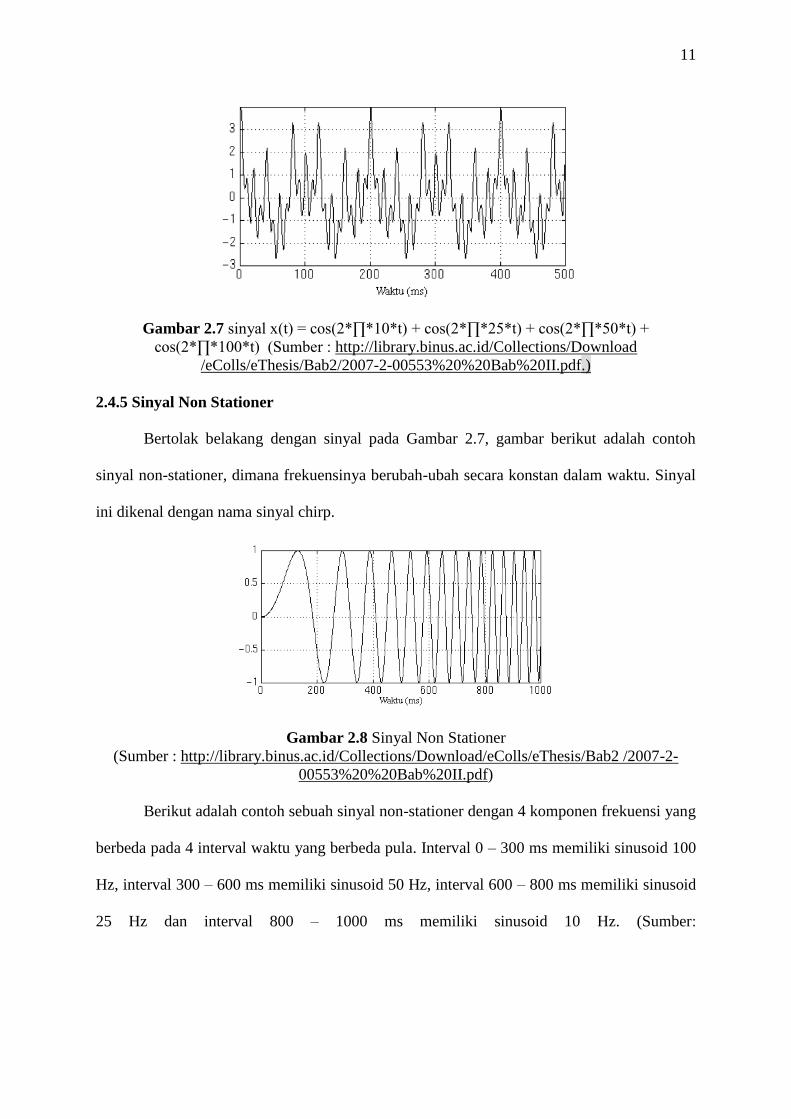
Gambar 2.7 sinyal x(t) = cos(2*∏*10*t) + cos(2*∏*25*t) + cos(2*∏*50*t) +
cos(2*∏*100*t) (Sumber : http://library.binus.ac.id/Collections/Download
/eColls/eThesis/Bab2/2007-2-00553%20%20Bab%20II.pdf.)
2.4.5 Sinyal Non Stationer
Bertolak belakang dengan sinyal pada Gambar 2.7, gambar berikut adalah contoh
sinyal non-stationer, dimana frekuensinya berubah-ubah secara konstan dalam waktu. Sinyal
ini dikenal dengan nama sinyal chirp.
Gambar 2.8 Sinyal Non Stationer
(Sumber : http://library.binus.ac.id/Collections/Download/eColls/eThesis/Bab2 /2007-2-
00553%20%20Bab%20II.pdf)
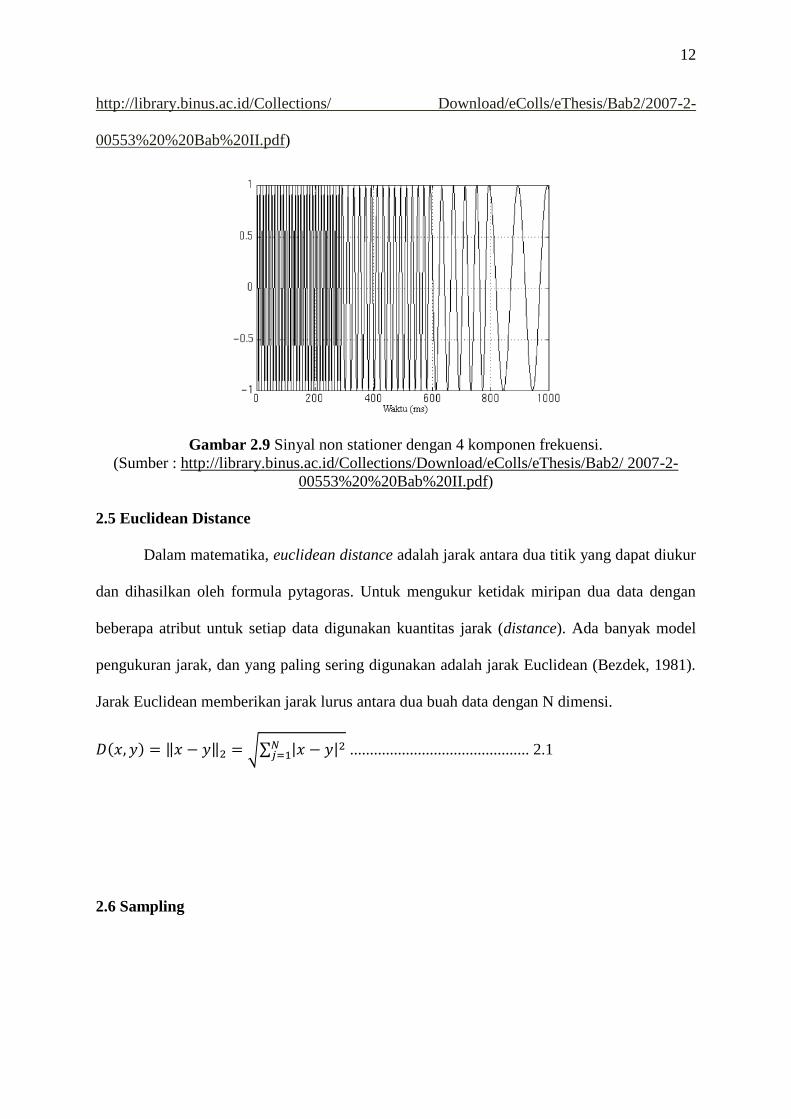
Berikut adalah contoh sebuah sinyal non-stationer dengan 4 komponen frekuensi yang
berbeda pada 4 interval waktu yang berbeda pula. Interval 0 – 300 ms memiliki sinusoid 100
Hz, interval 300 – 600 ms memiliki sinusoid 50 Hz, interval 600 – 800 ms memiliki sinusoid
25 Hz dan interval 800 – 1000 ms memiliki sinusoid 10 Hz. (Sumber:
12
http://library.binus.ac.id/Collections/ Download/eColls/eThesis/Bab2/2007-2-
00553%20%20Bab%20II.pdf)
Gambar 2.9 Sinyal non stationer dengan 4 komponen frekuensi.
(Sumber : http://library.binus.ac.id/Collections/Download/eColls/eThesis/Bab2/ 2007-2-
00553%20%20Bab%20II.pdf)
2.5 Euclidean Distance
Dalam matematika, euclidean distance adalah jarak antara dua titik yang dapat diukur
dan dihasilkan oleh formula pytagoras. Untuk mengukur ketidak miripan dua data dengan
beberapa atribut untuk setiap data digunakan kuantitas jarak (distance). Ada banyak model
pengukuran jarak, dan yang paling sering digunakan adalah jarak Euclidean (Bezdek, 1981).
Jarak Euclidean memberikan jarak lurus antara dua buah data dengan N dimensi.
( ) ‖ ‖ √∑ | | ............................................. 2.1
2.6 Sampling
13
Kebanyakan sinyal di alam ini dalam bentuk analog. Untuk memperoleh sinyal diskrit
dari sinyal analog harus dilakukan suatu proses yang disebut sampling. Secara matematik,
proses sampling dapat dinyatakan oleh persamaan berikut :
(n) = (nT) = x(t)|t =Ts untuk ( )
Dimana:
x(t) = sinyal analog
x(n) = sinyal waktu diskrit
xa (nT) = sinyal analog yang disampling setiap periode Ts
Ts = Waktu Sampling, Fs =
sampling rate atau (
)
Secara umum
∮ =
∮= Frekuensi Relatif (normalized frekuensi)
F = Frekuensi Informasi, Fs = Frekuensi Sampling
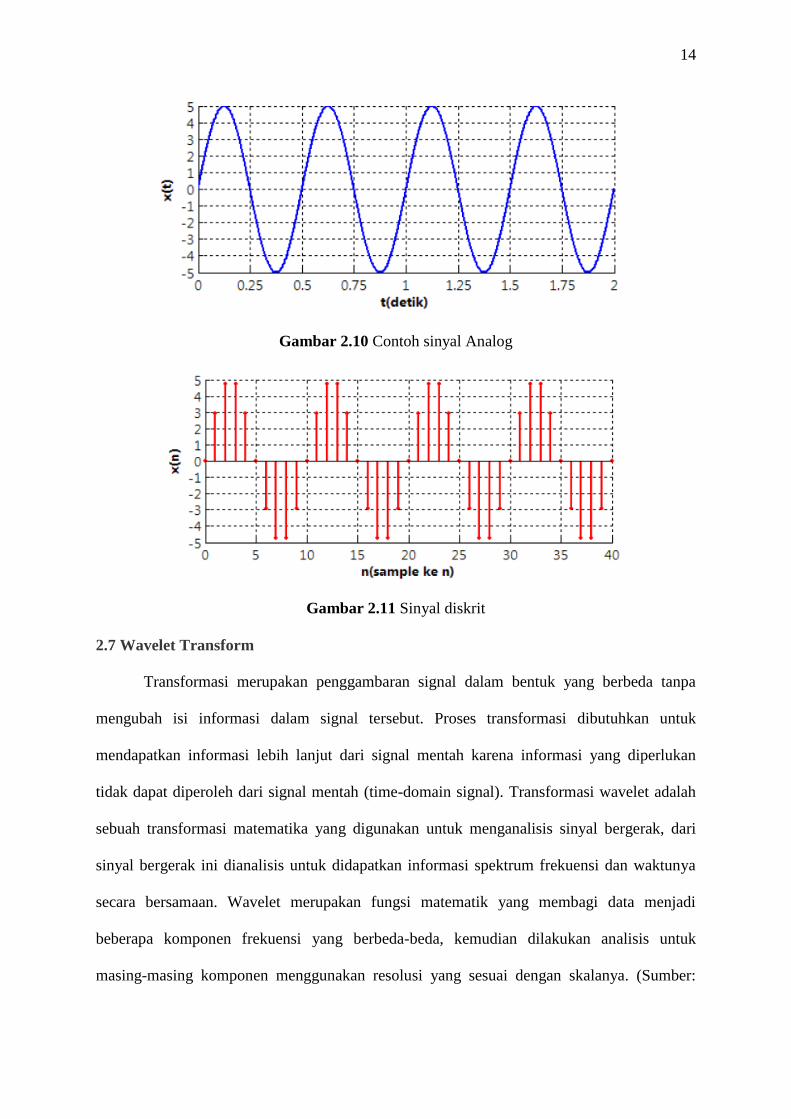
Contoh sampling sinyal analog menjadi sinyal diskrit.
14
Gambar 2.10 Contoh sinyal Analog
Gambar 2.11 Sinyal diskrit
2.7 Wavelet Transform
Transformasi merupakan penggambaran signal dalam bentuk yang berbeda tanpa
mengubah isi informasi dalam signal tersebut. Proses transformasi dibutuhkan untuk
mendapatkan informasi lebih lanjut dari signal mentah karena informasi yang diperlukan
tidak dapat diperoleh dari signal mentah (time-domain signal). Transformasi wavelet adalah
sebuah transformasi matematika yang digunakan untuk menganalisis sinyal bergerak, dari
sinyal bergerak ini dianalisis untuk didapatkan informasi spektrum frekuensi dan waktunya
secara bersamaan. Wavelet merupakan fungsi matematik yang membagi data menjadi
beberapa komponen frekuensi yang berbeda-beda, kemudian dilakukan analisis untuk
masing-masing komponen menggunakan resolusi yang sesuai dengan skalanya. (Sumber:
15
http://digilib.ittelkom.ac.id/index.php?option=com_content&view=artic le&id=1035:teori-
wavelet&catid=13:rpl&Itemid=14).
Transformasi wavelet dalam lingkup signal processing adalah suatu metode untuk
mendekomposisi (memisahkan) sinyal masukan yang diinginkan menjadi sebuah bentuk
gelombang lain (wavelet). Kemudian akan dilakukan analisis pada sinyal tersebut dengan
mengolah koefesien-koefesien wavelet.
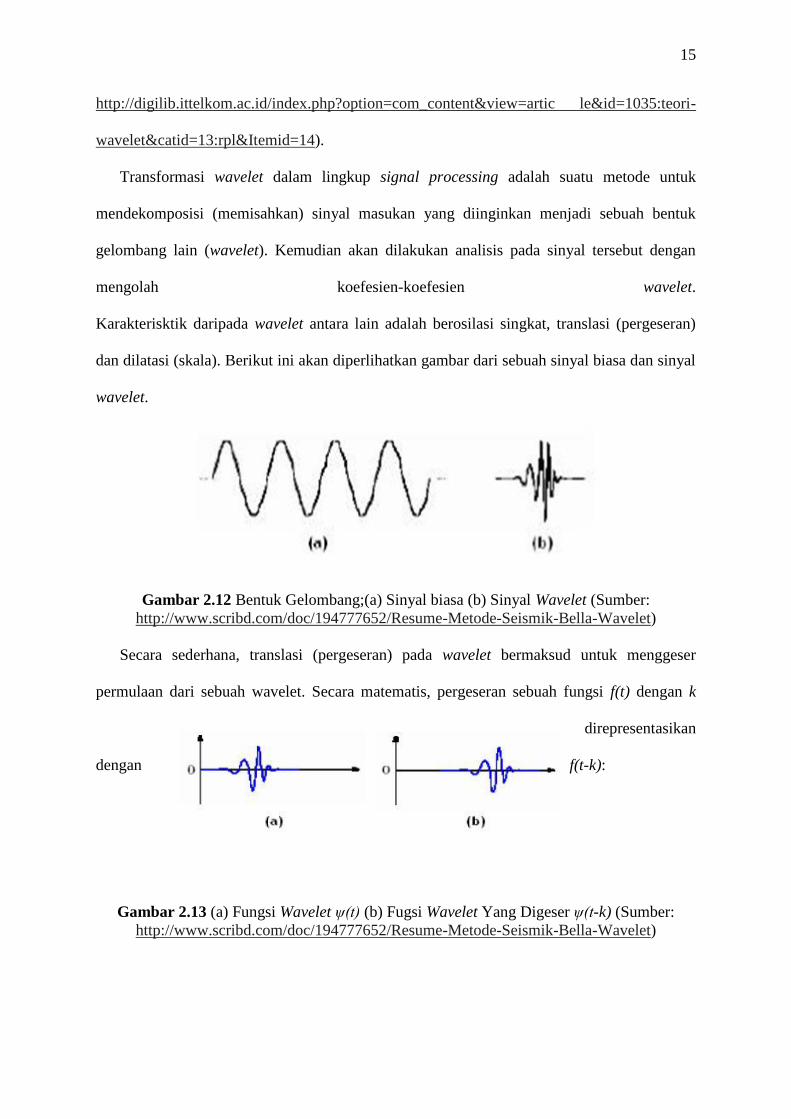
Karakterisktik daripada wavelet antara lain adalah berosilasi singkat, translasi (pergeseran)
dan dilatasi (skala). Berikut ini akan diperlihatkan gambar dari sebuah sinyal biasa dan sinyal
wavelet.
Gambar 2.12 Bentuk Gelombang;(a) Sinyal biasa (b) Sinyal Wavelet (Sumber:
http://www.scribd.com/doc/194777652/Resume-Metode-Seismik-Bella-Wavelet)
Secara sederhana, translasi (pergeseran) pada wavelet bermaksud untuk menggeser
permulaan dari sebuah wavelet. Secara matematis, pergeseran sebuah fungsi f(t) dengan k
direpresentasikan
dengan f(t-k):
Gambar 2.13 (a) Fungsi Wavelet ψ(t) (b) Fugsi Wavelet Yang Digeser ψ(t-k) (Sumber:
http://www.scribd.com/doc/194777652/Resume-Metode-Seismik-Bella-Wavelet)
16
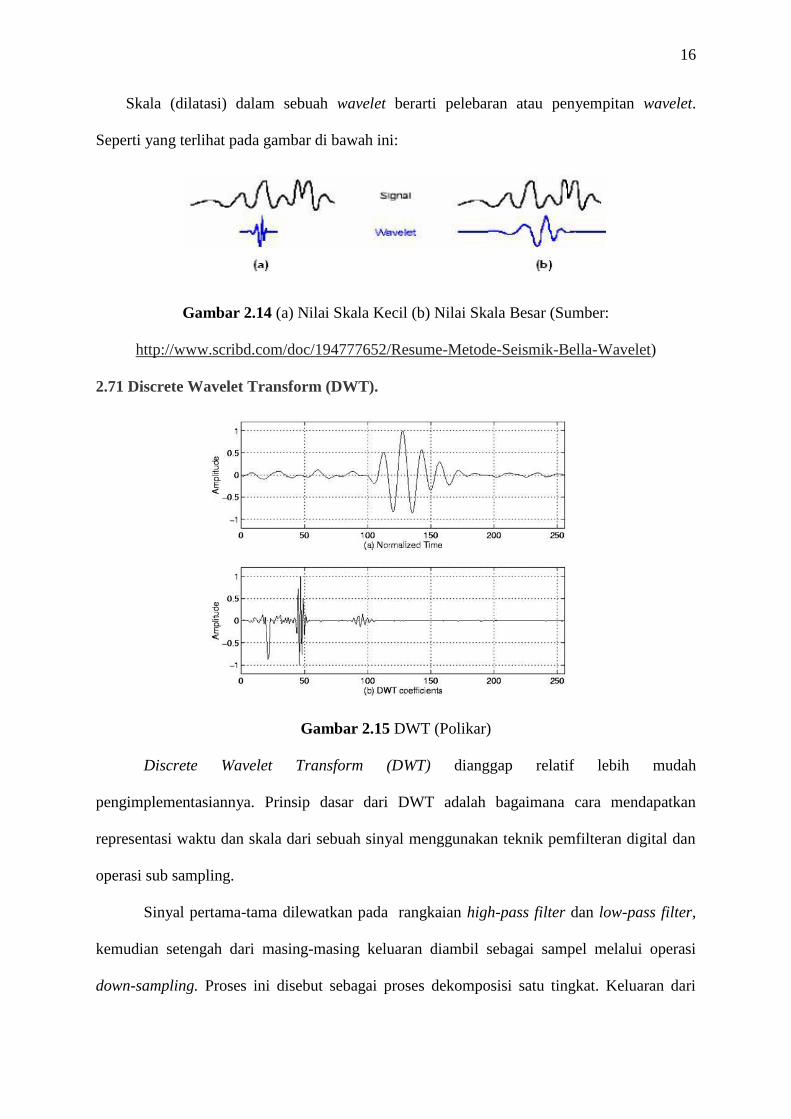
Skala (dilatasi) dalam sebuah wavelet berarti pelebaran atau penyempitan wavelet.
Seperti yang terlihat pada gambar di bawah ini:
Gambar 2.14 (a) Nilai Skala Kecil (b) Nilai Skala Besar (Sumber:
http://www.scribd.com/doc/194777652/Resume-Metode-Seismik-Bella-Wavelet)
2.71 Discrete Wavelet Transform (DWT).
Gambar 2.15 DWT (Polikar)
Discrete Wavelet Transform (DWT) dianggap relatif lebih mudah
pengimplementasiannya. Prinsip dasar dari DWT adalah bagaimana cara mendapatkan
representasi waktu dan skala dari sebuah sinyal menggunakan teknik pemfilteran digital dan
operasi sub sampling.
Sinyal pertama-tama dilewatkan pada rangkaian high-pass filter dan low-pass filter,
kemudian setengah dari masing-masing keluaran diambil sebagai sampel melalui operasi
down-sampling. Proses ini disebut sebagai proses dekomposisi satu tingkat. Keluaran dari

17
low pass filter digunakan sebagai masukan di proses dekomposisi berikutnya. Proses ini
diulang sampai tingkat proses dekomposisi yang diinginkan. Gabungan dari keluaran-
keluaran high-pass filter dan satu keluaran low pass filter yang terakhir disebut sebagai
koefisien wavelet, yang berisi informasi sinyal hasil transformasi yang telah terkompresi.
(Silalahi, Saragih 2010).
Penjelasan tersebut dapat diwakili oleh diagram berikut:
Gambar 2.16 Skema DWT (Sumber: Haikal. 2011)
Discrete wavelet transform merupakan pengembangan dari Continuous wavelet
transform dengan masukan diskrit, tetapi disederhanakan derivasi matematika. Hubungan
antara input dan output dapat direpresentasikan sebagai berikut.
Dimana g[n] adalah low pass filter seperti fungsi scaling, dann h[n] adalah high pass
filter seperti Mother wavelet. Strukturnya seperti di bawah ini.
.............................(2.2)
18
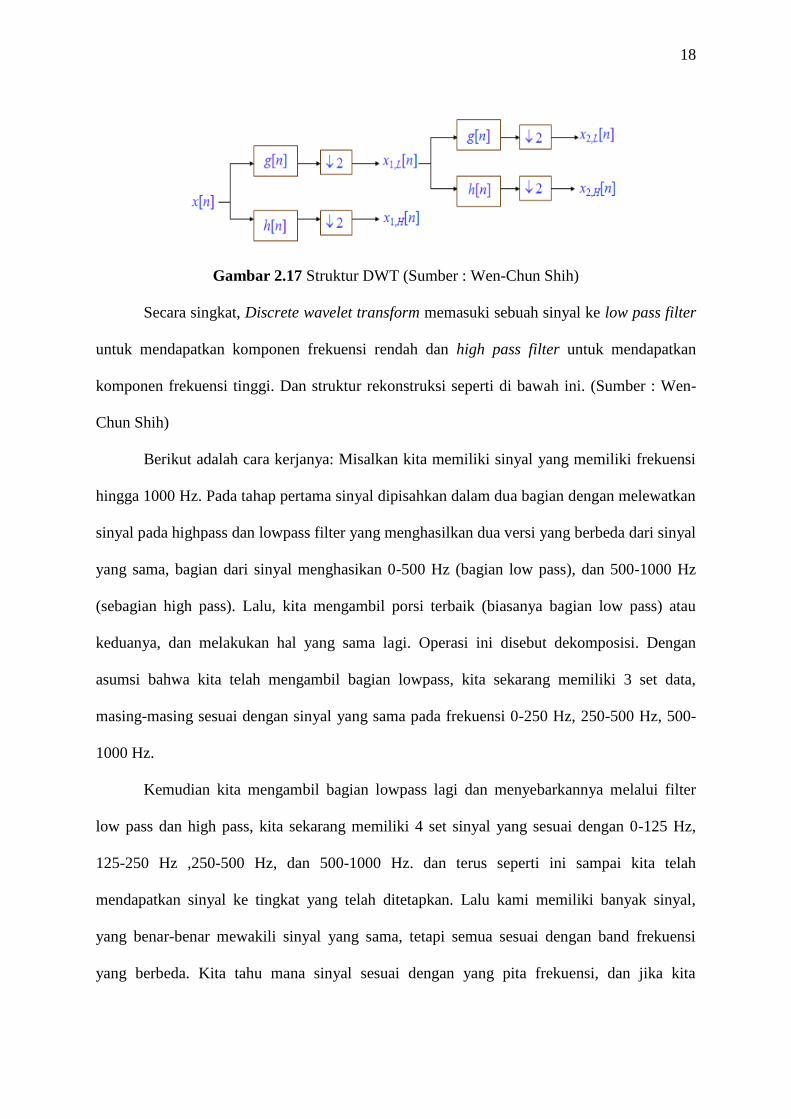
Gambar 2.17 Struktur DWT (Sumber : Wen-Chun Shih)
Secara singkat, Discrete wavelet transform memasuki sebuah sinyal ke low pass filter
untuk mendapatkan komponen frekuensi rendah dan high pass filter untuk mendapatkan
komponen frekuensi tinggi. Dan struktur rekonstruksi seperti di bawah ini. (Sumber : Wen-
Chun Shih)
Berikut adalah cara kerjanya: Misalkan kita memiliki sinyal yang memiliki frekuensi
hingga 1000 Hz. Pada tahap pertama sinyal dipisahkan dalam dua bagian dengan melewatkan
sinyal pada highpass dan lowpass filter yang menghasilkan dua versi yang berbeda dari sinyal
yang sama, bagian dari sinyal menghasikan 0-500 Hz (bagian low pass), dan 500-1000 Hz
(sebagian high pass). Lalu, kita mengambil porsi terbaik (biasanya bagian low pass) atau
keduanya, dan melakukan hal yang sama lagi. Operasi ini disebut dekomposisi. Dengan
asumsi bahwa kita telah mengambil bagian lowpass, kita sekarang memiliki 3 set data,
masing-masing sesuai dengan sinyal yang sama pada frekuensi 0-250 Hz, 250-500 Hz, 500-
1000 Hz.
Kemudian kita mengambil bagian lowpass lagi dan menyebarkannya melalui filter
low pass dan high pass, kita sekarang memiliki 4 set sinyal yang sesuai dengan 0-125 Hz,
125-250 Hz ,250-500 Hz, dan 500-1000 Hz. dan terus seperti ini sampai kita telah
mendapatkan sinyal ke tingkat yang telah ditetapkan. Lalu kami memiliki banyak sinyal,
yang benar-benar mewakili sinyal yang sama, tetapi semua sesuai dengan band frekuensi
yang berbeda. Kita tahu mana sinyal sesuai dengan yang pita frekuensi, dan jika kita

19
menempatkan mereka semua bersama-sama dan plot mereka pada grafik 3-D, kita akan
punya waktu dalam satu poros, frekuensi dan amplitudo kedua di sumbu ketiga. Ini akan
menunjukkan kepada kita mana frekuensi yang ada pada saat itu. (Polikar)
2.7.2 Continuous Wavelet Transform (CWT).
Cara kerja Continuous Wavelet Transform adalah dengan menghitung konvolusi
sebuah sinyal dengan sebuah jendela modulasi pada setiap waktu untuk setiap skala yang
diinginkan. Jendela modulasi yang mempunyai skala fleksibel inilah yang biasa disebut induk
wavelet atau fungsi dasar wavelet.
Secara umum transformasi wavelet kontinyu untuk sinyal f(x) berdimensi 1-D,
didefinisikan pada persamaan berikut:
Fungsi Ψ disebut dengan induk wavelet a, b ε R dan a ≠ 0 (R = bilangan nyata).
Dalam hal ini, a adalah parameter penskalaan (lebar) dan b adalah parameter penggeseran
posisi terhadap sumbu-x. (Silalahi. dan Saragih 2010).
2.8 Haar Wavelet
Sekitar 15 s/d 20 tahun yang lalu, suatu „alat‟ ampuh yang dapat dipakai untuk
memroses signal (suara ataupun citra) telah ditemukan. Alat tersebut dikenal dengan nama
wavelet (secara harfiah berarti „gelombang kecil‟), yang menyaingi alat lama yakni
transformasi Fourier dan berbagai modifikasinya. Sejak ditemukannya wavelet, dunia
pemrosesan signal dan teknologi digital berkembang dengan pesat. Munculnya TV digital,
kamera digital, telepon genggam, dan cakram video digital tidak lepas dari kemajuan dalam
pemrosesan signal dan teknologi digital. Computer graphics tentunya juga menikmati semua
kemajuan ini. Wavelet sesungguhnya sudah ditemukan sejak tahun 1910 oleh seorang
matematikawan Jerman bernama Haar. Namun, pada saat itu, keampuhannya dalam
.............................(2.3)

20
pemrosesan signal belum disadari oleh para matematikawan dan pengguna. Ia hanya
dipandang sebagai suatu basis ortonormal, yang dapat dipakai untuk menguraikan fungsi
menjadi suatu deret Haar, seperti halnya keluarga fungsi sinus dan cosinus yang digunakan
oleh Fourier pada awal abad kesembilanbelas. Keunggulan wavelet Haar baru akan tampak
apabila kita berurusan dengan fungsi diskrit tertentu. Cara kerja wavelet Haar dalam
pemrosesan signal dapat diilustrasikan sebagai berikut. Misalkan kita mempunyai sebuah
sinyal dengan deretan diskrit 4, katakan:
12 10 4 6.
Untuk menguraikannya menjadi deret Haar, mula-mula kita hitung nilai rata-ratanya
sepasang demi sepasang, sehingga kita peroleh:
11 5
Nilai rata-rata Koefisien detil
Jadi, menggunakan wavelet Haar, sinyal diskrit 12 10 4 6 ditransformasikan menjadi deret 8
3 1 -1. Selanjutnya sinyal tersebut dapat disimpan sebagai deret ini. Cara memperoleh deret
ini, yakni dengan penghitungan nilai rata-rata sepasang demi sepasang dan pencatatan
koefisien detilnya secara rekursif, dikenal sebagai filter bank. Perhatikan bahwa secara
matematis, kita mempunyai kesamaan matriks (untuk contoh di atas):
(12 10 4 6) = 8(1 1 1 1) + 3(1 1 -1 -1) + 1(1 -1 0 0) - 1(0 0 1 -1).
Matriks (1 1 1 1), (1 1 -1 -1), (1 -1 0 0), dan (0 0 1 -1) merupakan representasi dari empat
basis Haar yang pertama, sedangkan 8, 3, 1, dan -1 merupakan koefisien Haar yang
bersesuaian untuk matriks (12 10 4 6). Jadi, setelah transformasi, koefisien Haar inilah yang

21
kita simpan. Dibandingkan dengan penyimpanan langsung (tanpa transformasi). Pembulatan
koefisien-koefisien Haar yang bernilai „kecil‟ menjadi nol akan menghemat banyak memori
penyimpanan dan tidak akan mengubah banyak sinyal semula.
Haar wavelet dapat direpresentasikan sebagai berikut
dan fungsi skala adalah
Gambar 2.18 Haar wavelet (Sumber : Wen-Chun Shih)
Haar wavelet memiliki beberapa sifat, pertama dan dapat mendekati setiap
fungsi nyata terus menerus dengan kombinasi linear pergeseran dan skala, kedua,
orthogonality adalah
Ketiga, mother wavelet atau fungsi skala akan memiliki hubungan fungsional jika m
adalah berbeda.
.............................(2.4)
................................................(2.5)
........................................(2.6)

22
Kempat, koefisien skala m +1 dapat menghitung m, jika
Maka
Wavelet Haar (orthogonal)
Jenis wavelet ini merupakan compactly supported dan wavelet yang tertua dan
sederhana. Sifat-sifatnya yaitu:
a. Bersifat orthogonal, biortogonal dan compactly supported
b. Memungkinkan transformasi wavelet diskrit maupun kontinyu
c. Support width-nya 1
d. Panjang tapis 2
e. Bersifat simetris tetapi regulariltasnya tidak kontinyu.
f. Jumlah vanishing moments untuk untuk w (t) adalah 1.
Wavelet Haar dapat dijelaskan dalam ruang vektor 4 dimensi. Haar merentang ruang
vektor 4 dimensi dengan vektor-vektor basis seperti dibawah
.............................(2.7)
......................(2.8)
.......................(2.9)

23
1
1
0
0
,
0
0
1
1
,
1
1
1
1
,
1
1
1
1
3210 hhhh
yang bila digambarkan dalam bentuk sinyal akan berbentuk sebagai berikut :
h0
h1
h2
h3
Scaling Function = [
] = h0
Mother Wavelet [
] = h1
Mother Wavelet yang didilasikan =[
] = h2
Mother Wavelet yang didilasikan dan digeser = [
] = h3
Berikut adalah cara merepresentasikan suatu vektor sebagai kombinasi linier dari vektor-
vektor dalam wavelet Haar, seperti ini dengan menentukan nilai a,b,c dan d dalam persamaan
dibawah.
1
1
0
0
0
0
1
1
1
1
1
1
1
1
1
1
3
2
1
0
dcba
x
x
x
x
..................................(2.11)
Setelah itu dapat diturunkan persamaan-persamaan berikut dari persamaan diatas:
....................................(2.10)

24
x0 = a + b + c
x1 = a + b – c
x2 = a – b + d
x3 = a – b – d
sehingga didapatkan :
x2 – x3 = 2d
x0 – x1 = 2c
(x0 + x1) – (x2 + x3) = 4b
(x0 + x1) + (x2 + x3) = 4a
Dengan demikian dapat diambil kesimpulan bahwa
d = ½ (x2 – x3)
c = ½ (x0 – x1)
b = ½ ( ½ (x0 + x1) – ½ (x2 + x3))
a = ½ ( ½ (x0 + x1) + ½ (x2 + x3))
Terlihat bahwa sebenarnya koefisien-koefisian a,b,c,d dapat diperoleh dari operasi
averaging dan differencing terhadap nilai x0, x1, x2 dan x3 dengan aturan tertentu.
Stephane Mallat kemudian memperkenalkan cara mudah menghitung koefisien a, b, c
dan d dengan cara yang dikenal dengan algoritma piramida Mallat. Algoritma tersebut dapat
ditunjukkan dengan gambar berikut.
021
021 ...
ddd
aaaa
jj
HHH
LjLjLj
dimana aj adalah vektor awal dengan ukuran 2j, dan koefisien a, b, c, d dapat diperoleh
dari aproksimasi a0 detail-detail d0, d1 dan seterusnya. Matriks L dan H
2
2
2
2
3.01.
013..
..
...013
...013
2
1
10.32.
3210..
..
...3210
...3210
2
1
cccc
cccc
cccc
cccc
H
cccc
cccc
cccc
cccc
L

25
masing masing adalah matriks lowpass (averaging) dan highpass (differencing) dengan
bentuk:
Matriks L dan H untuk basis Haar dimana c0 = c1 = 1 adalah sebagai berikut :
Proses mencari koefisien a, b, c dan d seperti ini disebut dengan proses dekomposisi. Sebagai
contoh, untuk vektor x di dibawah:
kita akan dekomposisi menjadi:
Nilai a,b, c dan d pada persamaan 2.11 kemudian dapat kita peroleh dengan melihat
nilai aproksimasi terakhir a0 dan semua nilai-nilai detail d0,d1 dan d1 dimana
a = ½ ( ½ (x0 + x1) + ½ (x2 + x3)) = a0 = 4,7
b = ½ ( ½ (x0 + x1) – ½ (x2 + x3)) = d0 = 21
c = ½ (x0 – x1) = d1(0) = -8
d = ½ (x2 – x3) = d1(1) = -12,5
26
2.9 Low Pass Filter
Low Pass Filter (LPF) merupakan bentuk filter yang mengambil frekuensi rendah dan
membuang frekuensi tinggi. LPF menghasilkan citra blur (lembut/halus). Ciri-ciri dari LPF
adalah semua koefisien filter harus positif dan jumlah semua koefisien sama dengan satu.
Salah bentuk dari LPF adalah filter rata-rata. (Prihatini, 2010).
Low Pass Filter adalah filter yang melewatkan sinyal dengan frekuensi yang lebih
rendah, hasill keluaran dari LPF berupa gelomabang yang disebut aproksimasi, aproksimasi
adalah pendekatan untuk memperoleg nilai yang sedekat mungkin dengan nilai yang
sebenarnya.
Gambar 2.19 Low Pass Filter
2.10 Penelitian Terkait
Rizal Candra (2012) dalam penelitiannya yang berjudul “Pengembangan Program
Aplikasi Penala Gitar Menggunakan Fast Fourier Transform” proses pembuatan penala
dimulai dengan meng-input suara dari alat musik ke komputer, lalu suara yang masuk akan
di-sampling, dan diubah ke data digital, lalu dengan menggunakan Fast Fourier Transform
akan didapat frekuensi. Frekuensi ini akan dihitung untuk mengetahui nadanya, nantinya
27
nada ini akan ditampilkan di layar sehingga pengguna tahu apakah nadanya sudah pas atau
belum. Saat program dijalankan, program membutuhkan masukan berupa suara gitar, maka
pengguna membunyikan gitar dan suara gitar akan ditangkap oleh mikrofon. Suara yang
masuk melalui mikrofon akan diproses di program sehingga menghasilkan tampilan yang
akan ditampilkan pada layar monitor. Umumnya dalam proses penalaan, suara gitar tidak
langsung sama atau tertala. Dibutuhkan pengulangan beberapa kali sehingga suara gitarnya
tertala dengan baik. Bila gitar sudah tertala, pengguna bisa keluar dari program.
hasil penelitiannya menunjukan dari hasil evaluasi penelitiannya terdapat kesalahan
penalaan 3 dari 30 kali testing, dengan tingkat kesalahan 10% dan ditarik kesimpulan sebagai
berikut:
a) Teknik-teknik yang digunakan dalam grafik komputer mampu mempresentasikan obyek
dunia nyata ke dalam data komputer, sehingga dapat lebih mudah untuk dikalkulasikan.
b) Fast Fourier Transform mampu mengubah gelombang suara berbasis waktu menjadi
gelombang berbasis frekuensi.
c) Terdapat noise yang cukup mengganggu dalam program tapi dapat sedikit teratasi
dengan pembatasan frekuensi rendah yang ditampilkan.
d) Mikrofon ternyata berpengaruh terhadap noise yang terjadi. Mikrofon yang kurang bagus
akan berpengaruh terhadap noise yang lebih banyak.
Metode FFT masih memiliki kekurangan dalam melakukan ekstraksi sinyal seperti, tidak
mampu menganalisa sinyal non-stationer dan tidak mampu memberikan informasi waktu
pada sinyal yang dianalisa, dan hanya dapat menangkap informasi apakah suatu sinyal
memiliki frekuensi tertentu ataukah tidak, tapi tidak dapat menangkap dimana frekuensi itu
terjadi. Jika FFT hanya memberikan informasi tentang frekuensi suatu sinyal, maka
transformasi wavelet memberikan informasi tentang kombinasi skala dan frekuensi. sehingga
pada penelitian ini digunakan metode wavelet transform.