bab ii landasan teori - digital library - perpustakaan pusat...
TRANSCRIPT

BAB II
LANDASAN TEORI
2.1 Sistem penyalaan
Sistem penyalaan adalah suatu sistem pada motor yang sangat penting untuk
diperhatikan. Sistem penyalaan ini erat hubungannya dengan tenaga (daya) yang
dibangkitkan oleh suatu mesin. Apabila sistem tidak bekerja dengan baik dan tepat,
maka hal ini dapat menggangu kelancaran pembakaran campuran bahan bakar dan
udara didalam silinder sehingga tenaga yang dihasilkan oleh mesin berkurang.
Sistem penyalaan bahan bakar diruang bakar atau silinder pada umumnya ada dua
macam, yakni sistem baterai dan sistem magnet. Kedua sistem ini mempunyai prinsip
dan tujuan yang sama. Yakni sama-sama memakai arus listrik dan bertujuan
membangkitkan tegangan listrik yang tinggi sekali, yang memungkinkan meloncatnya
bunga api listrik (elektron) diantara kedua ujung kutub busi, tinggi tegangan yang
dibangkitkan itu kira-kira 10.000 volt.
Perbedaan dari kedua sistem ini terletak pada sumber (supply) dari arus listrik
yang dipakai untuk penyalaan ini. Pada sistem baterai suplay arus listrik berasal dari
baterai, sedangkan pada sistem magnet, arus listrik berasal dari generator AC.
Loncatan bunga api listrik ini ditimbulkan oleh alat-alat listrik seperti :
a. koil penyalaan (coil ignition).
b. Busi
c. CDI (Capasitive Discharger Ignition).
2.1.1 Koil penyalaan (Coil Ignition).
Arus listrik yang datang dari baterai ataupun dari generator AC, akan masuk
kedalam koil, arus ini mempunyai tegangan yang rendah dan oleh koil tegangan ini
akan dinaikan samapi mencapai tegangan kira-kira 10.000 volt. Dalam koil terdapat
gulungan primer dan skunder yang dililitkan pada pelat besi tipis yang bertumpuk,
gulungan primer ini mempunyai kawat yang dililitkan dengan diameter 0,6 sampai 0,9
5

mm. Jumlah lilitannya sebanyak 200 kali. Sedangkan gulungan skunder mempunyai
lilitan kawat dengan diameter 0,05 sampai 0.08mm dengan jumlah lilitan sebanyak
20.000 kali Karena perbedaan jumlah gulungan pada kumparan primer dan sekunder
maka pada kumparan sekunder akan timbul tegangan kira-kira 10.000 volt. Arus
dengan tegangan tinggi ini timbul akibat terputus putusnya aliran arus pada kumparan
primer yang mengakibatkan tegangan tinggi pada kumparan sekunder. Karena
hilangnya medan magnet ini terjadi pada saat terputusnya arus listrik pada kumparan
primer, maka dibutuhkan suatu saklar pemutus yaitu CDI (Capasitive Discharger
Ignition).
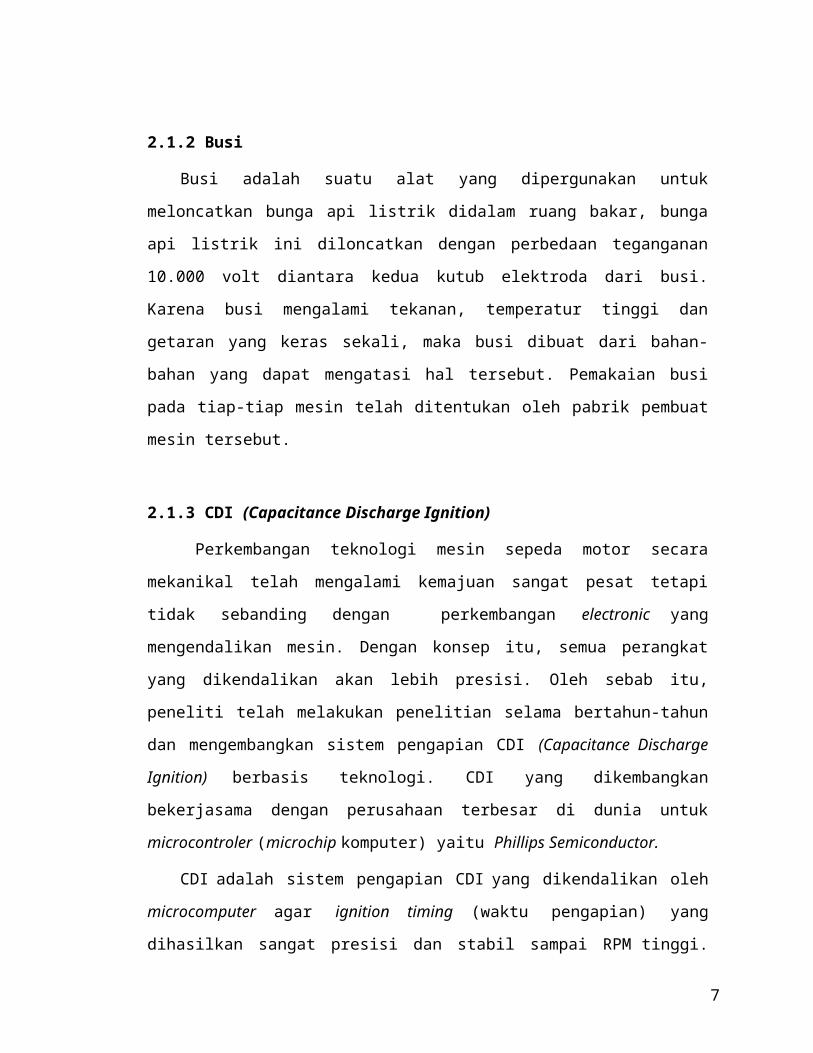
2.1.2 Busi
Busi adalah suatu alat yang dipergunakan untuk meloncatkan bunga api listrik
didalam ruang bakar, bunga api listrik ini diloncatkan dengan perbedaan teganganan
10.000 volt diantara kedua kutub elektroda dari busi. Karena busi mengalami tekanan,
temperatur tinggi dan getaran yang keras sekali, maka busi dibuat dari bahan-bahan
yang dapat mengatasi hal tersebut. Pemakaian busi pada tiap-tiap mesin telah
ditentukan oleh pabrik pembuat mesin tersebut.
2.1.3 CDI (Capacitance Discharge Ignition)
Perkembangan teknologi mesin sepeda motor secara mekanikal telah
mengalami kemajuan sangat pesat tetapi tidak sebanding dengan perkembangan
electronic yang mengendalikan mesin. Dengan konsep itu, semua perangkat yang
dikendalikan akan lebih presisi. Oleh sebab itu, peneliti telah melakukan penelitian
selama bertahun-tahun dan mengembangkan sistem pengapian CDI (Capacitance
Discharge Ignition) berbasis teknologi. CDI yang dikembangkan bekerjasama dengan
perusahaan terbesar di dunia untuk microcontroler (microchip komputer) yaitu Phillips
Semiconductor.
CDI adalah sistem pengapian CDI yang dikendalikan oleh microcomputer agar
ignition timing (waktu pengapian) yang dihasilkan sangat presisi dan stabil sampai
RPM tinggi. Akibatnya pembakaran lebih sempurna dan hemat bahan bakar, serta
6
tenaga yang dihasilkan akan sangat stabil dan besar mulai dari putaran rendah sampai
putaran tinggi. Dengan CDI, emisi yang dihasilkan juga sangat rendah itu sebabnya
disebut teknologi Digital CDI dengan GREEN CDI (CDI Hijau = ramah lingkungan)
2.2 Catu daya
Dalam sistem elektronik, hampir semua rangkaian elektronik membutuhkan
sumber tegangan DC (Direct Current) yang teratur dengan besar 5V-30V. Dalam
beberapa kasus, pencatuan ini dapat dilakukan secara langsung oleh baterai (misalnya
6V, 9V, 12V) namun dalam banyak kasus lainnya akan lebih menguntungkan apabila
di gunakan sumber AC (Alternatting Current) Untuk itu diperlukan suatu perangkat
catu daya yang dapat mengubah arus AC menjadi DC. Regulator tegangan
menyediakan tegangan output DC yang konstan dan secara terus menerus menahan
tegangan output pada nilai yang diinginkan. Regulator ini hanya dapat bekerja jika
tegangan input (Vin) lebih besar daripada tegangan output (Vout). Biasanya perbedaan
tegangan input dengan output yang direkomendasikan tertera pada datasheet komponen
tersebut
2.3 Komunikasi data
Pertama kali komputer di temukan, komputer belum bisa berkomunikasi dengan
yang lain. Pada saat itu komputer sangat sederhana sekali. Berkat kemajuan teknologi
di bidang elektronika, komputer mulai berkembang pesat dan semakin dirasakan
manfaatnya dalam kehidupan sehari-hari. Sekarang ini komputer sudah menjamur
dimana-mana. Komputer tidak hanya dimonopoli oleh perusahaan-perusahaan,
universitas-universitas atau dilembaga-lembaga lainnya, bahkan komputer dapat
dimiliki secara pribadi seperti kita memiliki televisi, radio, dan lain-lain.
Secara garis besar suatu sistem sirkulasi pengolahan data terdiri dari pengumpulan
data, pemprosesan, dan distribusi. Dari sirkulasi ini maslah yang banyak dijumpai dari
perusahaan justru dalam hal pengumpulan data dan distribusi data dan informasi untuk
beberapa lokasi.
7

SUMBER MEDIA TRANSMISI
PENERIMA
Untuk data yang menggunakan komputer, pengiriman data menggunkan sistem
transmisi elektronik, biasanya disebut dengan komunikasi data. Teknik komputer dan
teknik komunikasi berkembang dengan pesat. Akibat teknik komunikasi data yang
merupakan perpaduan antara kedua teknik tersebut juga berkembang dengan pesat.
Akhir-akhir ini perkembangan tersebut terasa juga dampaknya di Indonesia, sehingga
keperluan akan tenaga kerja yang termpil dan mempunyai pengetahuan komunikasi
data juga semakin meningkat.
Gambar 2.1 Diagram blok komunikasi data
Untuk pengiriman data dari satu tempat ketempat yangb lain, harus ada tiga
elemen sistem yang tersedia, yaitu sumber data, media transmisi, dan penerima. Jika
salah satu elemen tidak tersedia maka pengiriman tidak dapat dilakukan. Pada gambar
2.1 dijelaskan mengenai ketiga elemen tersebut. Berikut ini akan dijelaskan mengenai
ketiga elemen komunikasi data tersebut.
1. Sumber
Sumber adalah bagian yang mengirimkan informasi, contohnya station radio,
televisi, telepon, dan lain-lain
2. Media Transmisi
Media transmisi adalah jalur pengiriman data atau pembawa data yang dikirim,
dapat berupa kabel, udara dan lain-lain
3. Penerima
Penerima adalah bagian alat yang menerima data atau informasi, contohnya
pesawat telepon, dan lain-lain
8

2.4 Jenis komunikasi
Setelah mengetahui tentang sistem dasar komunikasi data, ada bagian penting
yang perlu diketahui adalah jenis sistem komunikasi. Komunikasi data terbagi dua
yaitu :
1. komunikasi analog
2. komunikasi digital
2.4.1 Komunikasi analog
Komunikasi analog yaitu suatu komunikasi dimana sinyal informasi yang akan
dikirimkan langsung memodulasi sinyal pembawa, tanpa melakukan proses digitalisasi
terlebih dahulu.
2.4.1.1. Amplitude modulation (AM)
Amplitude Modulastion (AM) adalah proses modulasi pengubah amplitude
sinyal pembawa sesuai dengan sinyal modulasinya atau sinyal informasi. Sehingga
dalam modulasi AM, frekuensi dan fasa yang dimiliki sinyal pembawa tetap, tetapi
amplitude sinyal pembawa berubah sesuai dengan informasi. Persamaan dari perubahan
gelombang dapat dilihat pada persamaan 2.1
y(t) = Acos (2πƒt + Ø) (2.1)
dari persamaan tersebut nilai A sangat berpengaruh terhadap perubahan amplitudo
tersebut. Sedangkan untuk bentuk gelombang dari amplitude modulation dapat dilihat
gambar 2.2
Gambar 2.2 Bentuk gelombang AM
9

Sehingga Am merupakan metode pertama kali yang digunakan untuk penyiar
radio komersil. Tetapi AM memiliki suatu kelemahan yang mendasar yaitu dapat
terganggu oleh atmosfir , dan juga memiliki bandwitch yang sempit sehingga
membatasi kualitas suara yang dipancarkan.
2.5 Komunikasi digital
Komunikasi digital yaitu komunikasi dimana sinyal informasi yang akan
dikirimkan sudah berupa data digital atau berbentuk gelombang diskrit yang hanya
memiliki logika 1 dan logika 0. jika data digital tersebut akan dikirimkan melalui media
transmisi, diperlukan suatu teknik modulasi agar data yang akan dikirim dapat diterima
dengan baik.
2.5.1 Amplitudo shift keying (ASK)
ASK merupakan suatu teknik modulasi, dimana frekuensi dan fasa dalam
keadaan tetap, tetapi memiliki lebar yang berbeda, dan ASK memiliki 2 bit yaitu bit 0
dan bit 1.
Pada ASK, modulasi ini menyatakan sinyal digital 1 sebagai suatu nilai
tegangan tertentu (misalnya 1volt ) dan sinyal digital 0 sebagai sinyal digital dengan
tegangan 0 volt.
S(t)=
(2.2)
ASK tidak diterapkan secara luas untuk mengkonversikan data biner, karena
sinyalnya mudah terpengaruh oleh redaman, derau atau distorsi. Tetapi pada beberapa
hal ASK masih digunakan terutama pada modulasi hybrid (misalnya ASK digabungkan
dengan PSK (Phase Shift Keying) ). ASK umumnya digunakan untuk mentransmisikan
sinyal digital pada serat optik, adanya cahaya menandakan 1 elemen atau biner 1 dan
bila tidak ada cahaya maka 0. transmiter laser pada umumnya memiliki arus bias yang
tetap dan menyebabkan pemancaran cahaya dengan level yang rendah, oleh karena itu
level yang rendah dapat dipakai untuk mewakili elemen sinyal 1 sedangkan untuk
10

level yang tinggi mewakili elemen sinyal 0. dan bentuk gelombang dari ASK dapat di
lihat pada gambar 2.3.
2.3. Bentuk gelombang ASK
2.6 Antena
Antena adalah bagian yang paling penting dari sistem pemancar. Antena berfungsi
sebagai alat yang dapat meradiasi gelombang radio. Sebagian dari sistem penerima ,
antena berfungsi sebagai bagian yang dapat menangkap radiasi gelombang radio.
Antena yang ideal akan meradiasikan gelombang radio segala arah. Antena yang ideal
disebut sebagai antena isotropis. Sebagai gambaran, jika antena isotropis diletakan pada
titik pusat dari bola maka antena isotropis akan mengisi semua ruang yang ada pada
bola tersebut dengan radiasi gelombang radio.
Beberapa parameter-parameter pada antena adalah :
Polarisasi
Penguatan antena
Pengarahan
2.7 Gangguan Transmisi
Dalam sistem komuniksi, sinyal yang diterima kemungkinan berbeda dengan
sinyal yang ditransmisikan karena adanya gangguan transmisi. Untuk pengiriman
sinyal analog terdapat gangguan yang dapat menurunkan kualitas sinyal, namun bagi
pengiriman sinyal digital akan terdapat gangguan seperti bit error. Gangguan yang ada
pada transmisi data yaitu :
11

1. Atenuasi dan Distorsi Atenuasi
Kekuatan sinyal berkurang bila jaraknya terlalu jauh melalaui media taransmisi.
Pada sinyal analog karena anuasi berubah ubah sebagai fungsi frekuensi,sinyal
diterima menjadi penyimpangan, sehingga mengurangi tingkat kejelasan
2. Distorsi Tunda
Distorsi tunda merupakan suatu kejadian khas pada guided media, kejadian ini
disebabkan oleh sebuah sinyal yang melewati guilded berbeda frekuensi.
3. Derau
Adalah sinyal-sinyal yang tidak diinginkan yang terselip atau terbangkitkan dari
suatu tempat diantara transmisi dan penerimaan. Derau merupakan faktor utama
yang membatasi kinerja sistem komunikasi.
2.8 Metode arah komunikasi
Setelah mengetahui dari pengertian komunikasi data, jenis komunikasi dan
teknik modulasi yang akan digunakan dalam komunikasi baik itu digital maupun
analog. Hal yang penting dalam komunikasi yaitu tentang metode arah komunikasi.
Dalam suatu komunikasi dikenal 3 jenis arah komunikasi yaitu :
Arah komunikasi simplex (satu arah)
Yaitu suatu sistem yang berkomunikasi dalam satu arah saja yang mana hanya
memiliki salah satu bagian saja, contohnya informasi radio, TV, dan lain-lain.
Arah komunikasi half duplex (dua arah)
Yaitu suatu sistem yang berkomunikasi dua arah tetapi dilakukan secara
bergantian sehingga dimana salah satu perangkat dapat berfungsi sebagai
penerima atau pemancar saja, contohnya : radio walky talky, radio CB, dan
lain-lain.
Arah komunikasi full duplex (dua arah)
Yaitu suatu sistem yang berkomunikasi dalam dua arah secara langsung atau
bersamaan, sebagi contoh telephone, handphone, dan lain-lain.
12

2.9 Komunikasi data serial
Komunikasi data elektronik terdiri atas dua kategori yaitu : single-ended dan
diferensial. RS232 (single-ended) yang diperkenalkan di 1962 merupakan standart
interface yang diterbitkan oleh Asosisasi Industri Elektronika (Electronic Industry
Assosiation. EIA).
RS232 berfungsi sebagai penghubung antara peralatan data (DTE, Data
Terminal Equipment) seperti komputer, printer dan sebagainya, dengan peralatan
komunikasi data (DCE, Data Communication Equipment) yang juga disebut sebagai
modem (modulator-demodulator). Jarak antara kedua alat tersebut tidak boleh lebih
dari 15 meter.
Data RS-232 adalah bi-polar dengan ketentuan logic level sebagai berikut:
Logic 1 disebut “mark” terletak antara –3 volt hingga –12 volt.
Logic 0 disebut “space” terletak antara +3 volt hingga +12 volt.
Daerah tegangan antara –3 volt hingga +3 volt adalah daerah terlarang dan
demikian pula daerah lebih negatif dari –12 volt dan daerah lebih positif dari +12 volt.
Gambar 2.4 Konektor serial DB-9
Sumber : [email protected]
Salah satu contoh konektor serial yang sering digunakan adalah jenis DB-9
seperti yang terlihat pada gambar 2.18.
2.9.1 Port Serial/RS-232
Port serial lebih sulit ditangani dari pada port paralel karena peralatan yang
dihubungkan ke port serial harus komunikasi dengan menggunakan transmisi serial,
13
sedangkan data di komputer diolah secara paralel. Sehingga, data dari (dan ke) port
serial harus dikonversikan ke (dan dari) bentuk paralel untuk bisa digunakan secara
hardware hal ini bisa digunakan oleh UART (Universal Asyncronus Receiver
Transmitter).
Adapun keunggulan menggunakan port serial dari pada port paralel sebagai transfer
data yaitu :
1. Kabel port serial bisa lebih panjang dibandingkan kabel port paralel. Hal ini
karena port serial mengirimkan logika 1 sebagai –3 Volt hingga –25 Volt dan
logika 0 sebagai +3 Volt hingga +25 Volt, sedangkan port paralel menggunakan
TTL, yakni hanya 0 Volt untuk logika 0 dan +5 Volt untuk logika 1. ini berarti
port serial mamiliki rentang kerja 50 Volt sehingga kehilangan daya karena
panjang kabel bukan merupakan masalah serius jika dibandingkan dengan port
paralel.
2. Transmisi serial memerlukan lebih sedikit menggunakan jumlah kabel
dibandingkan dengan transmisi paralel, bisa hanya menggunakan tiga kabel
yaitu saluran Transmit Data,Recive Data, dan saluran Ground.
Gambar 2.5 Susunan Port Serial 9 pin
EIA (electronic Industry association) mengeluarkan spesifikasi listrik untuk
standar RS-232 yaitu :
1. Space (logika 0) antara +3 sampai +15 Volt.
2. Mark (logika 1) antara –3 sampai –15 Volt.
3. Daerah antara +3 Volt dan –3 Volt tidak ditetapkan.
14

4. Tegangan rangkaian terbuka tidak boleh melebihi 25 Volt (terhadap Ground).
5. Arus pada rangkaian tertutup (Short Circuit) atau hubung singkat tidak boleh
melebihi 500mA.
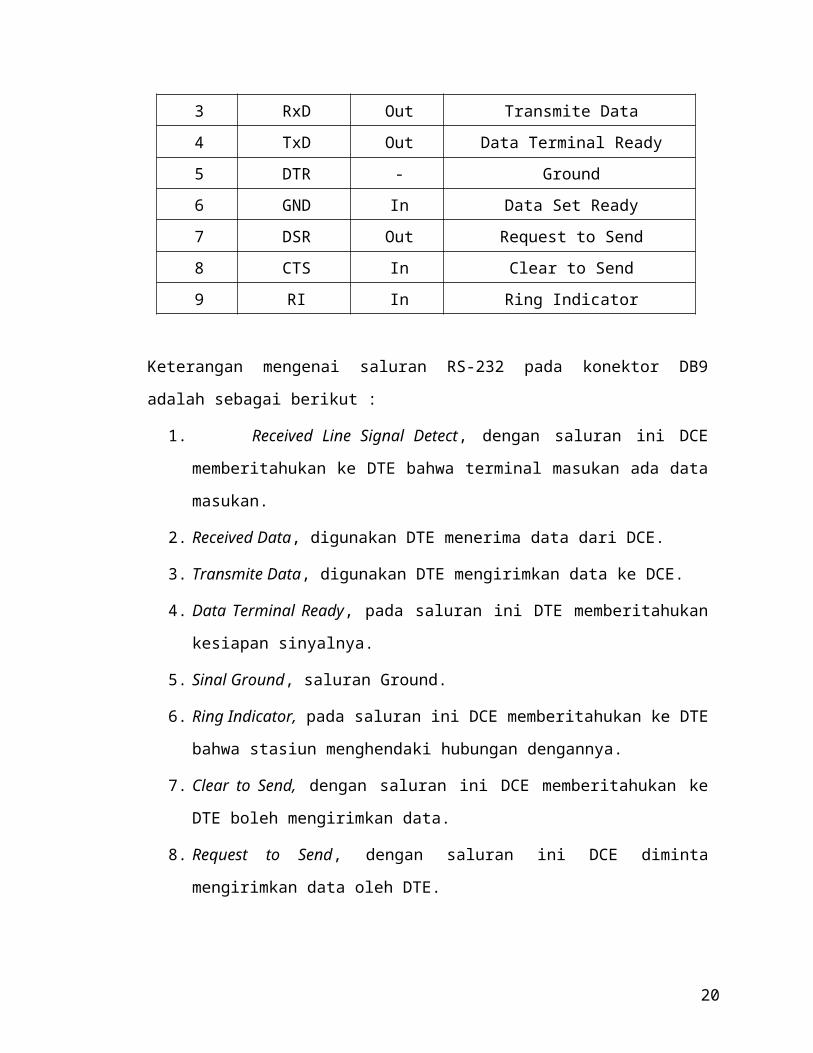
Tabel 2.1 Konfigurasi pin dan nama sinyal konektor serial DB9
Nama Pin
Nama Sinyal Direction Keterangan
1 DCD In Data Carrier Detect/Received Line Signal Detect
2 DSR In Received Data
3 RxD Out Transmite Data
4 TxD Out Data Terminal Ready
5 DTR - Ground
6 GND In Data Set Ready
7 DSR Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indicator
Keterangan mengenai saluran RS-232 pada konektor DB9 adalah sebagai berikut :
1. Received Line Signal Detect, dengan saluran ini DCE memberitahukan
ke DTE bahwa terminal masukan ada data masukan.
2. Received Data, digunakan DTE menerima data dari DCE.
3. Transmite Data, digunakan DTE mengirimkan data ke DCE.
4. Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan
sinyalnya.
5. Sinal Ground, saluran Ground.
6. Ring Indicator, pada saluran ini DCE memberitahukan ke DTE bahwa stasiun
menghendaki hubungan dengannya.
7. Clear to Send, dengan saluran ini DCE memberitahukan ke DTE boleh
mengirimkan data.
15

8. Request to Send, dengan saluran ini DCE diminta mengirimkan data oleh DTE.
9. DCE Ready, sinyal aktif pada saluran ini menunjukan bahwa DCE sudah siap.
2.9.2 MAX232
Hampir semua komponen digital bekerja pada level tegangan TTL. Dengan
demikian, dalam membentuk saluran RS232 di perlukan pengubahan level tegangan
timbal balik antara TTL – RS232. Hal ini dilakukan oleh IC MAX232 yang berisikan 2
buah Line Driver dan 2 buah Line Reciver. Dalam IC ini di lengkapai dengan
pengganda tegangan DC sehingga meskipun catu daya untuk IC MAX232 hanya +5
Volt, ini sanggup melayani level tegangan RS232 antara -10 Volt sampai +10 Volt
Gambar 2.6 IC MAX232
2.10 RLP-434A dan TLP-434A
Akhir-akhir ini, terdapat kecenderungan penggunaan komunikasi data secara
wireless dalam aplikasi komputer, PDA, ponsel, dll. Berbagai macam teknologi
digunakan sebagai sarana komunikasi nirkabel seperti RF, Infra Red, Bluetooth®,
Wireless LAN, Dan sebagainya. Tidak mau ketinggalan, DT-51™ MinSys pun juga
akan menggunakan modul RF untuk komunikasi data secara wireless dengan komputer.
Modul RF yang digunakan adalah TLP-434A (Pemancar) dan RLP-434A (Penerima).
Digunakannya TLP dan RLP 434A sebagai modul RF (Radio Frekuensi) pada skripsi
ini, selain kemampuannya di dalam pengiriman dan penerimaan data yang cukup baik,
harganya tergolong relatif murah.
16

Modul RF buatan LAIPAC ini sering sekali digunakan sebagai alat untuk
komunikasi data secara wireless. Biasanya kedua modul ini dihubungkan dengan
mikrokontroler atau peralatan digital yang lainnya. Input data adalah serial dengan
level TTL (Transistor – Transistor Logic). Jarak pancar maksimum dari modul RF ini
adalah 100 meter tanpa halangan dan 30 meter di dalam gedung. Ukuran ini dapat
dipengaruhi oleh faktor antena, kebisingan, dan tegangan kerja dari pemancar. Panjang
antena yang digunakan adalah 17 cm, dan terbuat dari kawat besi.
Modul RF yang digunakan adalah TLP-434 (Pemancar) dan RLP-
434(Penerima). Modul RF ini merupakan modul RF sudah berupa IC kemasan sil
(Single In Iine). Modul RF buatan LAIPAC ini kemampuannya didalam pengiriman
dan penerimaan data yang cukup baik
Gambar 2.7. RLP-434A (gambar A) dan TLP-434A (gambar B)
Susunan kaki dari modul TLP dan RLP 434A dapat dilihat pada tabel 2.2 berikut:
Tabel 2.2 Susunan kaki RLP-434A dan TLP-434A
17

2.11 Mikrokontroler AT89C51
AT89C51 adalah mikrokontroler keluaran Atmel dengan 4 Kbyte Flash PEROM
(Programmable and Erasable Read Only Memory). AT89C51 memiliki memori
dengan teknologi nonvolatile, yaitu isi memori tersebut dapat diisi ulang ataupun
dihapus berkali-kali.
Memori ini biasa digunakan untuk menyimpan instruksi berstandar MCS-51
sehingga memungkinkan mikrokontroler ini untuk bekerja dalam mode single chip
operation yang tidak memerlukan external memory untuk menyimpan source code
tersebut.
2.11.1 Deskripsi pin
AT89C51 mempunyai 40 kaki, 32 kaki diantaranya adalah kaki untuk keperluan
port paralel. Satu port paralel terdiri dari 8 kaki, dengan demikian 32 kaki tersebut
membentuk 4 buah port paralel, yang masing-masing dikenal sebagai Port-0, Port-1,
Port-2 dan Port-3. Nomor dari masing-masing kaki dari port paralel mulai dari 0
sampai 7. Jalur atau kaki pertama Port-0 disebut sebagai P0.0 dan jalur terakhir untuk
Port-0 adalah P0.7. Letak dari masing-masing port diperlihatkan pada gambar 2.8.
Gambar 2.8. Konfigurasi pin ATMEL AT89C51
18

2.11.2 Struktur memori
AT89C51 mempunyai struktur memori yang terdiri dari :
1. RAM internal
RAM internal memiliki memori sebesar 128 byte yang biasanya digunakan
untuk menyimpan variabel atau data yang bersifat sementara, dialamati oleh
RAM address register (register alamat RAM)..
2. Special function register (register fungsi khusus)
Memori yang berisi register-register yang memiliki fungsi khusus yang
tersediakan oleh mikrokontroler, seperti timer, serial dan lain-lain. 89C51
memiliki 21 special function register yang terletak pada alamat 80H hingga FFH
dengan rincian pada tabel 2.3. Salah satu contoh dari special function register
adalah accumulator, register ini terletak pada alamat E0H. Semua operasi
aritmatika dan operasi logika dan proses pengambilan dan pengiriman data ke
memori selalu menggunakan register ini.
19
Tabel 2.3. Alamat register fungsi khusus
Register Mnemonic AlamatP0 Port 0 Latch 80HSP Stack Pointer 81HDPTR Data Pointer 82H-83HDPL Data Pointer Low Byte 82HDPH Data Pointer High Byte 83HPCON Power Control 87HTCON Timer/Counter Control 88HTMOD Timer/Counter Mode Control 89H
TL0 Timer/Counter 0 Low Byte 8AHTL1 Timer/Counter 1 Low Byte 8BHTH0 Timer/Counter 0 High Byte 8CHTH1 Timer/Counter 1 High Byte 8DHP1 Port 1 Latch 90HSCON Serial Port Control 98HSBUF Serial Data Port 99HP2 Port 2 Latch A0HIE Interrupt Enable A8HP3 Port 3 Latch B0HIP Interrupt Priority Control B8HPSW Program Status Word D0HACC Accumulator E0HB Register B F0H
3. Flash PEROM
Memori yang digunakan untuk menyimpan instruksi-instruksi MCS-51
dialamati oleh program address register (register alamat program). AT89C51
memiliki 4 Kb Flash PEROM yang menggunakan atmel’s high-density non
volatile technology.
2.11.3 Timer AT89C51
20

AT89C51 mempunyai dua buah timer, yaitu Timer 0 dan Timer 1, setiap timer
terdiri dari 16 bit timer yang tersimpan dalam dua buah register yaitu THx untuk Timer
High Byte dan TLx untuk Timer Low Byte yang keduanya dapat berfungsi sebagai
counter maupun sebagai timer. Perbedaan terletak pada sumber clock dan aplikasinya.
Jika timer mempunyai sumber clock dengan frekuensi tertentu yang sudah pasti
sedangkan counter mendapat sumber clock dari pulsa yang hendak dihitung jumlahnya.
Aplikasi dari counter atau penghitung biasa digunakan untuk aplikasi menghitung
jumlah kejadian yang terjadi dalam periode tertentu sedangkan timer atau pewaktu
biasa digunakan untuk aplikasi menghitung lamanya suatu kejadian yang terjadi.
Perilaku dari register THx dan TLx diatur oleh register TMOD dan register TCON.
Timer dapat diaktifkan melalui perangkat keras maupun perangkat lunak.
Perioda waktu timer/counter dapat dihitung menggunakan rumus 2.1 dan 2.2 sebagai
berikut :
1. Sebagai timer/counter 8 bit
T = (255 – TLx) * μs, ------------------------------- (2.1)
2. Sebagai timer/counter 16 bit
T = (65535 – THx TLx) * μs, ----------------------- (2.2)
dimana : THx = isi register TH0 atau TH1
TLx = isi register TL0 atau TL1
Gambar 2.9 Register TCON dan TMOD
Pengontrolan kerja timer/counter diatur oleh register TCON. Register ini bersifat
bit addressable sehingga bit TF1 dapat disebut TCON.7 dan seterusnya hingga bit IT0
21

sebagai TCON.0. Register ini hanya mempunyai 4 bit saja yang berhubungan dengan
timer seperti diperlihatkan gambar 2.9 dan dijelaskan pada tabel 2.4.
Tabel 2.4 Fungsi bit register TCON yang berhubungan dengan timer
Nama Bit Fungsi
TF1 Timer 1 Overflow Flag yang akan diset jika timer
overflow.
TR1 Membuat timer 1 aktif (set) dan nonaktif (clear)
TF0 Timer 0 Overflow Flag yang akan diset jika timer
overflow.
TR0 Membuat timer 0 aktif (set) dan nonaktif (clear)
2.11.4 Prinsip kerja timer
Gambar 2.10 Operasi timer
Seperti yang telah disebutkan di atas timer mempunyai dua sumber clock untuk
beroperasi, yaitu sumber clock internal dan sumber clock eksternal. Jika timer
menggunakan sumber clock eksternal, maka bit C/T harus di-set atau berkondisi high,
saklar akan menghubungkan sumber clock timer ke pin Tx (To untuk Timer 0, T
untuk Timer 1). Apabila sumber clock internal digunakan, input clock berasal dari
osilator yang telah dibagi 12, maka bit C/T harus di-clear atau berkondisi low
sehingga saklar akan menghubungkan sumber clock timer ke osilator yang telah
dibagi 12.
22

2.11.5 Mode operasi port serial
Dalam Port Serial 89C51 mempunyai 4 buah mode operasi yang diatur oleh bit ke
7 dan bit ke 5 dari Register SCON (Serial Control).
SM0: Serial Port Mode bit 0, bit Pengatur Mode Serial
SM1: Serial Port Mode bit 1, bit Pengatur Mode Serial
SM2: Serial Port Mode bit 2, bit untuk mengaktifkan komunikasi multiprosesor pada
kondisi set.
REN: Receive Enable, bit untuk mengaktifkan penerimaan data dari Port Serial pada
kondisi set. Bit ini di set dan clear oleh perangkat lunak.
TB8: Transmit bit 8, bit ke 9 yang akan dikirimkan pada mode 2 atau 3. Bit ini di set
dan clear oleh perangkat lunak
RB8: Receive bit 8, bit ke 9 yang diterima pada mode 2 atau 3. Pada Mode 1 bit ini
berfungsi sebagai stop bit.
TI: Transmit Interrupt Flag, bit yang akan set pada akhir pengiriman karakter. Bit ini
diset oleh perangkat keras dan di clear oleh perangkat lunak
RI: Receive Interrupt Flag, bit yang akan set pada akhir penerimaan karakter. Bit ini
diset oleh perangkat keras dan di clear oleh perangkat lunak
Mode-mode operai port serial dapat di lihat pada tabel 2.5
Tabel 2.5 Mode operasi port serial
SM0 SM1 Mode Deskripsi
23

0 0 0 Shift Regidter 8 bit
0 1 1 UART 8 bit dengan baud rate yang diatur
1 0 2 UART 9 bit dengan baud rate permanen
1 1 3 UART 9 bit dengan baud rate yang dapat diatur
2.11.6 Baud rate
Untuk mengakses port serial, ada beberapa hal yang harus diatur terlebih dahulu
dengan mengisi beberapa register tertentu yaitu:
- Tentukan Mode Serial
- Tentukan Baud Rate Serial
Proses penentuan mode serial dilakukan dengan mengisi SCON Baud rate serial.
Baud rate dari port serial 89C51 dapat diatur pada Mode 1 dan Mode 3, namun pada
Mode 0 dan Mode 2, baud rate tersebut mempunyai kecepatan yang permanen yaitu
untuk Mode 0 adalah 1/12 frekwensi osilator dan Mode 2 adalah 1/64 frekwensi
osilator.
Dengan mengubah bit SMOD yang terletak pada register PCON menjadi set
(kondisi awal pada saat sistem reset adalah clear) maka baud rate pada Mode 1, 2 dan
3 akan berubah menjadi dua kali lipat. Pada Mode 1 dan 3 baud rate dapat diatur
dengan menggunakan timer1. Cara yang biasa digunakan adalah timer Mode 2 (8 bit
auto reload) yang hanya menggunakan register TH1 saja. Pengiriman setiap bit data
terjadi setiap timer 1 overflow sebanyak 32 kali sehingga dapat disimpulkan bahwa:
Lama pengiriman setiap bit data = Timer 1 Overflow X 32 ...........
Baud rate (jumlah bit data yang terkirim tiap detik) =
2.12 Regulator IC LM 7805
24

IC dengan tiga kaki yang digunakan sebagai komponen pendukung dari vcc untuk
menghasilkan tegangan 5 volt. Tegangan pada suatu transformator tidak selalu tetap atau
berubah-ubah, agar transformator stabil maka diperlukan tambahan regulator IC LM7805
yang digunakan untuk menstabilkan tegangan 5 volt tersebut. Komponen dari regulator
IC LM7805 bisa dilihat pada gambar 2.
Karakteristik IC regulator :
1. Ada tipe positif untuk meregulasi tegangan positif.
2. Ada tipe negatif untuk meregulasi tegangan negatif.
3. Penerapan IC mengharuskan Vi > Vo
4. Dalam praktek, minimum Vi ~Vo + 3 Volt
5. Agar dapat menerapkan Vi > Vo perlu menggunakan komponen-komponen
lepasan.
6. Transistor dalam konfigurasi tunggal-emitor, dimana Vi > Vo hanya kalau
transistornya jenuh.
Gambar 2.11 Regulator IC LM7805
2.13 Bahasa pemrograman assembly
Assembler adalah program komputer yang mentranslasi program dari bahasa
assembly ke bahasa mesin. Sedangkan bahasa Assembly adalah ekuivalensi bahasa mesin
dalam bentuk alphanumerik. Mnemonics alphanumerik digunakan sebagai alat bantu bagi
programmer untuk memprogram mesin komputer daripada menggunakan bahasa mesin
yang panjang dan rumit. Proses cara pembuatan program Assembly terlihat pada gambar
2.12.
25

Gambar 2.12 Proses Assembly
Program sumber assembly terdiri dari kumpulan baris-baris perintah dan
biasanya disimpan dengan extension .ASM dengan 1 baris untuk satu perintah, setiap
baris perintah tersebut bisa terdiri atas beberapa bagian (field), yakni bagian label, bagian
mnemonic, bagian operand yang bisa lebih dari satu dan terakhir bagian komentar.
Program sumber (source code) dibuat dengan program editor biasa yaitu note pad pada
windows, selanjutnya program sumber diterjemahkan ke bahasa mesin dengan
menggunakan program assembler. Hasil kerja program assembler adalah program objek
dan juga assembly listing, dengan ketentuan sebagian berikut:
1. Masing-masing bagian dipisahkan dengan spasi atau TAB, khusus untuk
operand yang lebih dari satu masing-masing operand dipisahkan dengan koma.
2. Bagian-bagian tersebut tidak harus semuanya ada dalam sebuah baris, jika
ada satu bagian yang tidak ada maka spasi atau TAB sebagai pemisah bagian tetap
harus ditulis.
3. Bagian Label ditulis mulai huruf pertama dari baris, jika baris bersangkutan
tidak mengandung label, maka label tersebut digantikan dengan spasi atau TAB,
yakni sebagai tanda pemisah antara bagian Label dan bagian mnemonic seperti
pada gambar 2.13.
26

Gambar 2.13 Bentuk program sumber assembly
Assembler directive digunakan untuk mengatur kerja dari program assembler.
Mnemonic untuk assembler directive tergantung pada program assembler yang dipakai.
Ada beberapa assembler directive yang umum, yang sama untuk banyak macam program
assembler diantaranya adalah :
1. ORG (Origin)
Digunakan untuk menyatakan lokasi memori tempat instruksi atau perintah yang
ada di bawahnya disimpan.
2. EQU (Equate)
EQU digunakan untuk mendefinisikan sebuah simbol atau lambang assembler
secara bebas.
3. DB (Define Byte)
Digunakan untuk memberikan nilai tertentu pada memory-program.
4. DW (Define Word)
Dipakai untuk memberi nilai 2 byte ke memory-program pada baris bersangkutan.
assembler directive ini biasa dipakai untuk membentuk suatu tabel yang isinya
adalah nomor-nomor memory-program.
5. DS (Define Storage)
Assembler directive ini dipakai untuk membentuk variabel. Sebagai variabel tentu
saja memori yang dipakai adalah memory-data (RAM) bukan memory-program
(ROM).
27
Label Mnemonic Operand 1 Operand 2 Komentar
Isi Memori: Movx @DPTR,A Isi Akumulator ke alamat yangditunjuk oleh DPTR

2.14 Bahasa pemrograman delphi 7
Borland delphi adalah paket bahasa pemrograman yang mempunyai cakupan
kemampuan yang luas dan sangat canggih. Secara umum, kemampuan delphi adalah
menyediakan komponen – komponen dan bahasa pemrograman yang andal, sehingga
memungkinkan kita untuk membuat program aplikasi sesuai dengan keinginan, dengan
tampilan dan kemampuan yang canggih.
Borland delphi merupakan bahasa Pemrograman yang mudah, karena delphi adalah
bahasa perograman tingkat tinggi (high level) sehingga sangat memudahkan user untuk
bermain-main di tingkat ini. Pada Pemrograman delphi kita tinggal click dan drag ke form,
dan jadilah program aplikasi yang kita inginkan.
Delphi memiliki kelebihan dibandingkan dengan program aplikasi lainnya, karena
delphi bersifat produktifitas dari pengembangan perangkat lunak yang dapat dibagi menjadi
5 atribut penting yaitu :
1. Kualitas lingkungan pengembangan visual.
2. Kecepatan compiler dibandingkan dengan kompleksitasnya.
3. Kekuatan bahasa pemrograman dibandingkan dengan
kompleksitasnya.
4. Fleksibilitas arsitektur basis data.
5. Pola desain dan pemakaian yang diwujudkan oleh framework-nya.
Pada saat pertama kali dipanggil, akan muncul beberapa tools utama dalam Delphi
IDE, yaitu menu, toolbar, component palette, object inspector, object treeview, code editor,
project manager, dan beberapa tools lain. Pada dasarnya IDE (Integrated Development
Environment) milik delphi dibagi menjadi 6 bagian utama :
1. Menu
Dari menu ini kita dapat memanggil atau menyimpan program, menjalankan dan
melacak bug program.
2. Speed bar
Disebut juga toolbar berisi kumpulan tombol, setiap tombol pada speed bar
menggantikan salah satu item menu, contoh seperti pada gambar 2.14
28

Gambar 2.14 Speed bar
3. Component pallete
Component pallete berisi komponen-komponen Delphi (visual/non visual VCL dan
CLX) yang dapat dipergunakan untuk menyusun tampilan program dalam form.
Komponen yang ada dalam component palllete disusun dan dikelompokkan dalam
page sesuai fungsinya. Bila kita letakkan mouse pointer diatas sebuah komponen
dalam component pallete dan kita diamkan beberapa saat, maka akan muncul nama
komponen tersebut dalam bentuk tooltip, seperti yang tampak pada gambar 2.15
berikut :
Gambar 2.15 Component pallete
4. Form designer
Form Designer adalah form tempat kita mengatur komponen sesuai kebutuhan
tampilan program yang kita buat. Objek yang sudah ada dalam form dapat diatur
posisinya sesuai kebutuhan cukup dengan click-drag pada objek tersebut. Objek
yang terseleksi akan ditandai dengan delapan kotak kecil di bagian tepi dan
sudutnya. Form designer tampak pada gambar 2.16.
29

Gambar 2.16 Form designer
5. Object inspector
Object Inspector digunakan untuk mengubah nilai property dari objek terseleksi
yang ada dalam form designer. Object inspector terdiri atas dua page, yaitu
property dan event. Setiap jenis komponen akan memiliki property dan event yang
berbeda dengan jenis komponen lainnya (lihat gambar 2.17).
Gambar 2.17 Object inspector
30

6. Object treeview
Object treeview menampilkan hubungan parent-child antar komponen dalam bentuk
hirarki. Object treeView, form designer, dan object inspector saling tersinkronisasi,
sehingga bila fokus kita ubah dalam form designer maka fokus dalam object
treeview dan object inspector juga akan berpindah, gambar dari object treeview
dapat dilihat pada gambar 2.18.
Gambar 2.18 Object treeview
31