bab i pendahuluan -...
TRANSCRIPT

BAB I
PENDAHULUAN
I.1. Latar Belakang
Pada saat ini kebutuhan akan data batimetri semakin meningkat seiring dengan
kegunaan data tersebut untuk berbagai aplikasi, seperti perencanaan pelabuhan,
perencanaan jalur kapal, perencanaan konstruksi lepas pantai, aplikasi navigasi
kelautan dan lain-lain. Data batimetri perairan ini akan semakin dibutuhkan dengan
adanya prioritas Pembangunan Nasional dalam bidang maritim serta keinginan
Indonesia sebagai poros maritim dunia. Gagasan terbesar menuju poros maritim dunia
adalah dengan membangun tol laut.
Untuk menjadikan Indonesia sebagai poros maritim dunia melalui konsep tol
laut ini, pemerintah telah menyusun rencana pembangunan melalui Rencana
Pembangunan Jangka Menengah Nasional (RPJMN) 2014-2019. Berdasarkan draf
RPJMN tersebut, pemerintah berencana untuk melakukan pembangunan dan
pengembangan 24 pelabuhan strategis di seluruh wilayah Indonesia yang terintegrasi
dalam konsep tol laut. Salah satu prasarana fisik di dalam transportasi laut adalah
pelabuhan yang berfungsi sebagai tempat bongkar muat barang dan naik turunnya
penumpang. Sebagai tindakan antipasi perkembangan permintaan tentang jasa
angkutan laut pada masa mendatang, maka perlu dipersiapkan lokasi-lokasi baru
untuk pelabuhan.
Perencanaan alur pelayaran dapat ditentukan dari titik-titik kedalaman yang
terdapat dalam peta batimetri pada wilayah perairan. Dengan adanya pembangunan
dan pengembangan pelabuhan pelabuhan yang baru maka diperlukan adanya
informasi data batimetri dasar laut/perairan. Informasi ini nantinya sangat diperlukan
untuk menentukan jalur kapal dan menentukan lokasi pelabuhan.
Untuk memperoleh data topografi dasar laut dilakukan dengan cara survei
hidrografi. Salah satu metode yang diterapkan pada pengukuran batimetri dasar laut
ini yaitu dengan menggunakan teknologi akustik dasar laut. Akustik dasar laut
mempunyai keterkaitan antara lain dalam proses perambatan suara pada medium air
yang mampu memberikan berbagai informasi penting dasar perairan dan penentuan
2
posisi di perairan. Salah satu teknologi akustik yang telah dikenal dan sering
digunakan dalam pemetaan batimetri yaitu dengan menggunakan teknologi
echosounder, dalam hal ini pengukuran kedalaman dilakukan dengan menggunakan
alat singlebeam echosounder, yang mengacu pada IHO SP-44 Orde Spesial tahun
2008. Disamping itu untuk memperoleh peta batimetri dasar laut yang akurat,
diperlukan pengamatan pasang surut. Profil kontur yang terdapat dalam peta batimetri,
juga harus terdefinisi dengan baik terhadap mean sea level (MSL) maupun surutan
peta (Chart Datum).
Selain pulau Jawa, Sulawesi adalah salah satu pulau diwilayah timur Indonesia
yang paling berkembang secara ekonomi. Disamping pertanian dan hasil laut, saat ini
perkebunan kelapa sawit merupakan primadona baru yang tengah berkembang
khususnya di Sulawesi Utara. Untuk mendukung tumbuhnya perkebunan kelapa sawit
ini dibutuhkan adanya pelabuhan yang sangat membantu dalam efektifitas dan
efisiensi entry exit logistik diwilayah Sulawesi Utara. Selanjutnya dengan adanya
pelabuhan yang memadai akan mendorong kegiatan ekspor produksi kelapa sawit
yang ada di Gorontalo Sulawesi Utara.
Dalam kegiatan aplikatif ini, pembuatan peta batimetri dimaksudkan untuk
menyediakan informasi mengenai topografi dasar laut guna untuk kegiatan rekayasa
di pantai Sumalata. Dengan demikian diharapkan akan dapat membantu dalam
pelaksanaan pembangunan kegiatan rekayasa seperti pembangunan pelabuhan dan
perencanaan alur pelayaran di wilayah perairan tersebut.
I.2. Lingkup Kegitan
Lingkup kegiatan pada pekerjaan aplikatif ini meliputi hal-hal sebagai berikut:
1. Pengukuran dilakukan di sebagian perairan Hutokalo Gorontalo Sulawesi
Utara dilakukan oleh PT. LINTANG BUMI.
2. Pada kegiatan aplikatif ini, data pengukuran batimetri dengan alat
singlebeam echosounder South SDE 28 S yang diintegrasikan dengan GPS
metode RTK
3. Pada kegiatan ini pengamatan pasut dilakukan di Pantai Sumalata selama
30 hari dengan interval 1 jam.

3
4. Datum horizontal pembuatan peta topografi dan peta batimetri mengacu
pada datum WGS’84
5. Datum vertikal pada peta batimetri mengacu pada chart datum.
6. Model chart datum yang digunakan mengacu terhadap Dinas Hidro-
Oseanografi TNI AL.
I.3. Tujuan
Adapun tujuan dari kegiatan aplikatif ini yaitu :
1. Menentukan nilai MSL, Chart datum, dan Surutan peta di Pantai Sumalata
Gorontalo Utara
2. Tersedianya peta batimetri dengan skala 1:2000 di Pantai Sumalata Gorontalo
Utara. Peta batimetri ini akan digunakan untuk kegiatan rekayasa laut yang
mengacu pada standar nasional yaitu standar SNI 7646:2010.
3. Membuat peta topografi di sekitar area pengukuran batimetri menggunakan
data shapefile peta RBI.
4. Menggabungkan peta topografi yang mengacu pada MSL dan peta batimetri
yang tinggi dan kedalamannya mengacu pada Chart Datum.
I.4. Manfaat
Manfaat dari kegiatan apliaktif ini adalah untuk mendukung perencanaan kegiatan
rekayasa laut di pantai Sumalata Gorontalo Utara.
I.5. Landasan Teori
I.5.1. Pasang Surut
Pasang surut adalah naik turunnya permukaan air laut secara periodik yang
disebabkan oleh pengaruh gaya tarik benda-benda langit terutama bulan dan matahari
di bumi yang berotasi (IHO, 2008). Meskipun massa matahari lebih besar dibanding
dengan massa bulan, akan tetapi gaya pembangkit pasang oleh matahari jauh lebih
kecil dibanding dengan gaya yang dihasilkan oleh bulan. Hal ini dikarenakan jarak

4
matahari yang terlalu jauh bila dibandingkan dengan jarak bumi dengan bulan
(Poerbandono dan Djunarsjah, 2005).
Terdapat beberapa teori mengenai pasut, yaitu teori kesetimbangan
(Equilibrum) pertama kali dikemukakan oleh Sir Isaac Newton yang menjelaskan
bahwa seluruh permukaan bumi diasumsikan tertutup oleh permukaan air dengan
densitas yang sama dan naik turunnya muka air laut sebanding dengan gaya
pembangkit pasut. Teori dinamis, dikemukakan pertama kali oleh Laplace. Pada teori
Laplace menyatakan bahwa gelombang pasut yang terbentuk dipengaruhi oleh gaya
pembangkit pasut, kedalaman dan luas perairan, pengaruh rotasi bumi, dan pengaruh
gesekan dasar. Teori ini melengkapi teori kesetimbangan sehingga sifat-sifat pasut
dapat diketahui secara kuantitatif (Priyana, 1994).
Gaya Pembangkit Pasut (GPP) merupakan resultan gaya tarik bulan matahari
dan gaya sentrifugal. Arah gaya sentrifugal menjauh dari bulan, sedangkan arah gaya
tarik bulan menuju pusat bulan dan besarnya tergantung jaraknya ke pusat bulan. Gaya
yang sangat berpengaruh terhadap pasang surut dapat dilihat pada Gambar I.1.
Gambar I.1. Gaya pembangkit pasut (Sumber: Poerbandono dan Djunarsjah, 2005)
1. Gaya sentrifugal yang berfungsi sabagai penyeimbang.
𝐹𝑆 = 𝐺𝑀𝑚
𝑟2 = 𝑔𝑀𝑚
𝑀𝑒(
𝑎2
𝑟2) .......................................................................... (I.1)
2. Gaya tarik bulan
𝐹𝐵 = 𝐺𝑀𝑝𝑀𝑚
𝑅2 = 𝐺𝑀𝑚
𝑅2 = 𝑔𝑀𝑚
𝑀𝑒(
𝑎2
𝑅2) ........................................................ (I.2)

5
Resultan antara gaya tarik bulan (Fp) dan gaya sentrifugal (Fc) merupakan gaya
pembangkit pasut, untuk lebih jelasnya dapat dilihat pada Gambar I.2.
Gambar I.2. Arah gaya sentrifugal dan gaya gravitasi bulan
(Sumber : Poerbandono dan Djunarsjah, 2005)
Dari Gambar I.2, maka dapat dihitung GPP dengan rumus sebagai berikut :
P = FB − FC ............................................................................................... (I.3)
Dalam hal ini :
Fc : gaya sentrifugal
Fp : gaya tarik bulan
Mm : massa bulan
Me : massa bumi
G : konstanta gaya gravitasi universal (6.67 x 10-11newton.m2/kg2)
g : konstanta gaya gravitasi
a : jari-jari bumi
r : jarak antara pusat bumi dan pusat bulan
R : jarak dari pusat bulan ke permukaan bumi
P : gaya pembangkit pasut
I.5.1.1. Analisis harmonik pasut. Analisis harmonik pasut bertujuan untuk
menghitung amplitude hasil respons dari kondisi laut setempat dan beda fase dari
gelombang tiap komponen terhadapkeadaan pasang surut setimbang. Nilai perubahan
amplitude dan keterlambatan fase yang dihitung dinyatakan dalam sebuah konstanta
harmonik. Untuk menentukan nilai konstanta harmonik pasut laut tersebut maka
sebelumya perlu untuk diketahui bahwa pasut yang diamati dari variasi naik turunnya

6
muka laut adalah hasil penjumlahan dari semua gelombang komponen harmonik pasut
yang terjadi. Dengan demikian tinggi muka laut pada suatu saat (t) dapat dituliskan
dalam persamaan sebagai berikut (Soeprapto 1993) :
……………………………………………(I.4)
Dimana:
h(t) : tinggi muka air fungsi dari waktu
v(tn) : residu
hm : tinggi muka air rerata
k : jumlah komponen
Ai : amplitudo komponen ke-i
i : kecepatan sudut komponen ke-i
t : waktu
gi : fase komponen ke-i
Dari rumus diatas dapat diuraikan menjadi :
……………..………….(I.5)
Jika dimisalkan :
………………………………………………(I.6)
Maka hasilnya menjadi :
…………………….……………....(I.7)
Keterangan :
Ar dan Br : konstanta harmonik ke-i
k : jumlah komponen pasut,
tn : menunjukkan waktu pengamatan tiap jam (tn = -n, n+1, n; tn = 0
adalah waktu tengah-tengah pengamatan).
Besarnya ( hm ) hasil hitungan dengan persamaan diatas mendekati elevasi pasut
pengamatan h(t) jika :
………………………………………………(I.8)

7
Persamaan diatas kemudian diturunkan terhadap Ari dan Bri
……………………………………….(I.9)
Dari hubungan persamaan tersebut diperoleh 2n + 1 persamaan dimana n adalah
banyaknya komponen harmonik pasut laut. Sehingga dapat ditentukan besaran S, Ar,
dan Br. Selanjutnya berdasarkan estimasi kuadrat terkecil maka persamaan dapat
diuraikan dalam tahap – tahap sebagai berikut :
1. persamaan pengamatan tinggi muka laut L = AX
2. persamaan koreksi v = (AX) – L, maka :
……………………………..(I.10)
Berikut ini pendesainan matrik pengamatan pasut :
………………………………(I.11)
……..…………………………………………...(I.12)
………………………………………………….(I.13)
………………………………………………………………….(I.14)

8
Menentukan nilai amplitude komponen pasut laut :
………………………………………………………………………..(I.15)
Menentukan nilai fase komponen pasut laut :
……………………………………………………………………...(I.16)
Dalam hal ini :
L : data tinggi muka laut
A : matrik koefisien
X : parameter komponen harmonik pasut laut
V : nilai koreksi
Ar : parameter A komponen pembentuk pasut
Br : parameter B komponen pembentuk pasut
𝛚 : kecepatan sudut gelombang harmonik
t : waktu pengamatan
Ai : amplitude
g : fase
I.5.1.2. Konstanta-konstanta harmonik pasut. Konstanta-konstanta harmonik
pasut yang diperoleh dari analisis harmonik pasut saat ini telah diketahui ratusan
konstanta harmonik pasut, tetapi banyak diantaranya yang mempunyai bilangan yang
sangat kecil sehingga yang ditimbulkan sangat kecil pula dan umumnya dalam analisis
pasut dapat diabaikan. Untuk keperluan rekayasa umumnya digunakan 9 unsur utama
pembangkit pasut atau komponen utama konstanta harmonik pasut, yaitu: M2, S2, N2,
K2, K1, O1, P1, M4 dan MS4. Konstanta-konstanta harmonik pasut dapat dilihat pada
Tabel I.1.

9
Tabel I.1. Konstanta harmonik pasut (Sumber: modifikasi dari Poerbandono dan
Djunarsjah 2005)
Konstanta Keterangan Periode
(jam) Kategori
K1 Deklinasi sistem Bulan dan Matahari 23,93
Diurnal O1 Deklinasi Bulan 25,82
P1 Deklinasi Matahari 24,07
S2 Gravitasi Matahari dengan orbit
lingkaran dan sejajar ekuator Bumi 12,00
Semi Diurnal
M2 Gravitasi Bulan dengan orbit
lingkaran dan sejajar ekuator Bumi 12,42
N2 Perubahan jarak Bulan ke Bumi
akibat lintasan elips 12,66
K2 Perubahan jarak Matahari ke Bumi
akibat lintasan elips 11,97
Mf Variasi setengah bulanan 327,86 Periode
Panjang Mm Variasi bulanan 661,30
Ssa Variasi semi tahunan 2191,43
2SM2 Interaksi bulan dan matahari 11,61 Periode
dangkal
MNS2
Interaksi bulan dan matahari dengna
perubahan jarak matahari akibat
lintasan berbentuk elips
13,13
MK3
Interaksi bulan dan matahari dengna
perubahan jarak bulan akibat
lintasan berbentuk elips
8,18
Periode
dangkal M4
Dua kali kecepatan sudut M2 akibat
pengaruh Bulan di perairan
Dangkal
6,21
MS4 Interaksi M2 dan S2 di perairan
dangkal 2,20
I.5.1.3. Tipe pasut. Penggolongan tipe pasang surut menggunakan 4 amplitudo
konstanta harmonik yaitu M2, S2, K1 dan O1. Tipe pasang surut didasarkan pada
perbandingan antara jumlah amplitudo konstanta-konstanta harian tunggal dengan
jumlah amplitudo konstanta-konstanta hariaan ganda. Perbandingan ini disebut nilai
Formzahl (F) seperti persamaan I.17 (Soeprapto, 2001).
F =A(K1)+A(O1)
A(M2)+A(S2)……………………………………………………………(I.17)
Dimana:

10
F : bilangan formzahl.
O1 : amplitude komponen pasang surut tunggal utama yang disebabkan oleh gaya
tarik bulan.
K1 : amplitudo komponen pasang surut tunggal utama yang disebabkan oleh gaya
tarik matahari.
M2 : amplitudo komponen pasang surut ganda utama yang disebabkan oleh gaya
tarik bulan.
S2 : amplitudo komponen pasang surut ganda utama yang disebabkan oleh gaya
tarik matahari.
Dari nilai F tersebut tipe-tipe pasang surut bias diklasifikasikan dengan
menggunakan aturan “Formzahl” sebagai berikut:
F < 0,25 : Tipe pasang surut harian ganda
0,25 < F ≤ 1,50 : Tipe pasang surut harian campuran condong ke harian ganda
1,50 < F ≤ 3,00 : Tipe pasang surut harian campuran condong ke harian tunggal
F > 3,00 : Tipe pasang surut harian tunggal
Tipe-tipe pasang surut dapat ditunjukkan dengan Gambar I.3.
Gambar I.3. Tipe-tipe pasang surut
(Sumber: NOAA 2008)
Tipe pasang surut harian tunggal Tipe pasang surut harian ganda
Tipe pasang surut harian campuran
Waktu (jam)
Tin
gg
i P
asu
t (m
eter
)
Waktu (jam) Waktu (jam)
Tin
gg
i P
asu
t (m
eter
)
Tin
gg
i P
asu
t (m
eter
)

11
I.5.1.4. Chart Datum dan MSL. Chart Datum atau muka surutan peta adalah
suatu bidang permukaan pada suatu daerah perairan yang didefinisikan terletak di
bawah permukaan air laut terendah yang mungkin terjadi. Chart Datum digunakan
sebagai dasar penentuan angka kedalaman pada peta batimetri (bidang nol).
Kedudukan Chart Datum diinisialkan dengan di bawah Mean Sea Level (S0) dengan
jarak sebesar faktor Z0 (jarak surutan peta). Besar faktor Z0 tersebut umumnya berbeda
antar lokasi lainya.
Gerakan periodik bulan dan matahari terhadap bumi menyebabkan adanya
bermacam-macam kedudukan permukaan air laut. Berbagai macam kedudukan air laut
tersebut dapat dilihat pada Gambar I.4.
Gambar I.4. Macam-macam kedudukan air laut (Sumber: Soeprapto 2001)
Beberapa istilah kedudukan muka air laut yang penting dikemukakan antara
lain (Soeprapto 2001).
1. Permukaan air laut rata-rata (Mean sea Level/MSL),
2. Permukaan pasang surut rerata (Mean Tidal Level/MTL),
3. Permukaan air tinggi purnama rata-rata (Mean High Water Spring/MHWS)
dan permukaan air rendah purnama rata-rata (Mean Low Water
Spring/MLWS),
4. Permukaan air tinggi perbani rata-rata (Mean High Water Neaps/MHWN)
dan permukaan air rendah perbani rata-rata (Mean low Water Neaps
/MLWN),

12
5. Permukaan air tinggi rata-rata (Highest High Water Spring/HHWS) dan
permukaan air rendah terendah rata-rata (Lower Low Water Spring/LLWS),
6. Muka surutan peta (Chart Datum/CD), dan
7. Permukaan pasang surut tertinggi astronomi (Highest Astronomic
Tide/HAT) dan permukaan pasang surut terendah astronomi (Lowest
Astronomic Tide /LAT).
Terlihat bahwa muka air rendah dapat berupa Chart Datum, Mean Low Water
Spring/MLWS, Mean Low Water Neaps /MLWN, Mean Lower Low Water/MLLW
maupun Lowest Astronomic Tide/LAT menunjukkan bahwa tergantung pada tipe pasut
di perairan yang bersangkutan, seperti diurnal atau semidiurnal, maka kedudukan dan
jarak relatif antara muka-muka air rendah ini juga akan bervariasi.
Berdasarkan hasil nilai amplitudo komponen harmonik telah ditetapkan muka
surutan peta yang berada pada jarak Z0 terhadap MSL. Terdapat beberapa model
penentuan Chart Datum, secara umum nilai muka surutan peta ditentukan dengan
persamaan I.18 (Soeprapto 2001):
CD = S0 - Z0 ............................................................................................. (I.18)
Perbedaan jarak surutan peta terletak pada penentuan besarnya Z0, untuk masing-
masing model adalah: (Soeprapto 2001)
1. Untuk Negara Prancis:
Z0= 1,2 (M2 + S2 + K2) .......................................................................... (I.19)
2. Air rendah pada peta Admiralty Inggris:
Z0= 1,1 (M2 + S2) .................................................................................. (I.20)
3. Air rendah pada peta Amerika Serikat:
Z0= M2 .................................................................................................. (I.21)
4. Menurut definisi Hidrografi Internasional (IHO):
Z0 = ∑ 𝐴𝑖𝑁𝑖=1 ........................................................................................ (I.22)
5. Untuk Indian Spring Low water:
Z0= (K1 + O1 + M2 + S2) ........................................................................ (I.23)
6. Menurut Dinas Hidro-oseanografi TNI-AL:
Z0 = AR kombinasi konstanta harmonik utama
(M2,S2, K2,N2, K1, O1, P1, M4 dan MS4) .................................. (I.24)

13
Banyaknya model untuk menentukan muka surutan peta antara lain karena
pada tiap-tiap daerah mempunyai tipe dan karakteristik pasut yang berbeda. Pemilihan
model pada umumnya adalah tergantung pada sifat pasut di daerah yang bersangkutan
dan pada kepentingan yang terkait.
I.5.1.5. Pengukuran pasang surut. Pengukuran pasang surut dapat dilakukan
dengan menggunakan berbagai macam alat yaitu dengan menggunakan palem pasang
surut, float gauge, gelombang akustik, tekanan hidrostatik, dan radar. Pada kegiatan
ini, alat yang digunakan untuk mengukur pasang surut pada Stasiun Pasang Surut
pantai Sumalata adalah Pengukuran dengan menggunakan palem pasut. Palem
diletakkan di dinding-dinding dermaga atau dinding stasiun pengamat pasut. Hasil
pengamatan pasut dilakukan untuk interval tertentu misalkan per-jam. Pencatatan hasil
pengamatan dilakukan secara manual oleh si pengamat di atas kertas. Meskipun
teknologi ini terbilang kuno, sampai saat ini penggunaan palem pasut masih terus
dilakukan dengan alasan data control dan reality check di lapangan.
I.5.2. Standardisasi Survei Hidrografi
Untuk menjaga kualitas dari seluruh data hasil kegiatan pemeruman tetap baik,
perlu ditetapkan standar resmi, baik standar resmi berskala nasional maupun skala
internasional. Untuk skala internasional, sudah ditetapkan standar resmi untuk
kegiatan survei hidrografi oleh International Hidrographic Organization, yakni IHO
Special Publication 44 (IHO SP’ 44). Sementara untuk skala nasional, Badan
Standardisasi Nasional telah menetapkan SNI 7646:2010 tentang Survei hidrografi
dengan menggunakan singlebeam echosounder. Untuk kegiatan aplikatif ini, standar
yang diacu yakni SNI 7646:2010.
I.5.2.1. SNI 7646:2010. SNI 7646:2010 merupakan standar yang ditetapkan
Badan Standardisasi Nasional Republik Indonesia yang berisikan pedoman maupun
acuan dalam kegiatan survei hidrografi dengan menggunakan singlebeam
echosounder. SNI 7646:2010 mengacu pada IHO Special Publication 44. Dalam SNI
ini hanya dibahas mengenai SNI survei hidrografi dengan menggunakan peralatan
singlebeam echosounder. Pemilihan metode singlebeam echosounder karena metode
ini paling banyak digunakan di Indonesia pada saat ini. SNI 7646-2010 menetapkan
14
ketentuan dan prosedur survei hidrografi menggunakan singlebeam echosounder yang
meliputi ketentuan-ketentuan, prosedur pelaksanaan survei hidrografi, pengolahan
data, penyimpanan dan penyajian data, dan pelaporan hasil survey hidrografi.
I.5.2.2. Orde ketelitian SNI 7646:2010. Menurut SNI 7646:2010, derajat
ketelitian dalam pelaksanaan kegiatan survei hidrografi diklasifikasikan menjadi
empat orde, yakni:
a. Orde khusus
Orde khusus survei hidrografi mendekati standar ketelitian survei rekayasa dan
digunakan secara terbatas di daerah-daerah kritis dimana kedalaman di bawah
laut sangat minim dan di dalam hal ini karakteristik dasar airnya berpotensi
membahayakan kapal. Daerah-daerah kritis tersebut ditentukan secara langsung
oleh instansi yang bertanggung jawab di dalam masalah kualitas survei. Sebagai
contoh ialah pelabuhan-pelabuhan tempat sandar dan alur masuknya. Semua
sumber kesalahan harus dibuat minimal.
Orde khusus memerlukan penggunaan yang berkaitan dengan side scan sonar,
multi transducer arrays atau multibeam echosounder dengan resolusi tinggi
dengan jarak antar lajur perum yang rapat untuk mendapatkan gambaran dasar
air 100%. Harus pula diyakinkan bahwa setiap benda dengan ukuran lebih besar
dari 1 meter persegi dapat terlihat oleh peralatan perum yang digunakan.
Penggunaan side scan sonar dan multibeam echosounder mungkin diperlukan
di daerah-daerah di dalam hal ini benda-benda kecil dan rintangan bahaya
mungkin ditemukan atau survei untuk keperluan investigasi.
b. Orde satu
Orde satu survei hidrografi diperuntukkan bagi pelabuhan-pelabuhan, alur
pendekat, haluan yang dianjurkan, alur navigasi dan daerah pantai dengan lalu
lintas komersial yang padat di dalam hal ini kedalaman di bawah laut memiliki
luas cukup memadai dan kondisi geofisik dasar lautnya tidak begitu
membahayakan kapal (misalnya lumpur atau pasir). Survei orde satu berlaku batas
di daerah dengan kedalaman kurang dari 100 meter. Meskipun persyaratan
pemeriksaan dasar laut tidak begitu ketat jika dibandingkan orde khusus,
namun pemeriksaan dasar laut secara menyeluruh tetap diperlukan di daerah-

15
daerah di dalam hal ini karakteristik dasar laut dan resiko adanya rintangan
berpotensi membahayakan kapal. Pada daerah-daerah yang diteliti tersebut, harus
diyakinkan bahwa untuk kedalaman sampai dengan 40 meter benda-benda
dengan ukuran lebih besar dari 2 meter persegi, atau pada kedalaman lebih dari
40 meter, benda-benda dengan ukuran 10% dari kedalaman harus dapat
digambarkan oleh peralatan perum yang digunakan.
c. Orde dua
Orde dua survei hidrografi diperuntukkan di daerah dengan kedalaman kurang
dari 200 meter yang tidak termasuk di dalam orde khusus maupun orde satu, dan
di dalam hal ini gambaran batimetri secara umum sudah mencukupi untuk
meyakinkan bahwa tidak terdapat rintangan di dasar laut yang akan
membahayakan tipe kapal yang lewat atau bekerja di daerah tersebut. Hal ini
merupakan kriteria yang penggunaannya di bidang kelautan, sangat beraneka
ragam, di dalam hal ini orde hidrografi yang lebih tinggi tidak dapat
diberlakukan. Pemeriksaan dasar laut mungkin diperlukan pada daerah-daerah di
dalam hal ini karakteristik dasar air dan resiko adanya rintangan berpotensi
membahayakan kapal.
d. Orde tiga
Orde tiga survei hidrografi diperuntukkan untuk semua area yang tidak tercakup
oleh orde khusus, orde satu dan dua pada kedalaman lebih besar dari 200 meter.
I.5.3. Survei Batimetri
Survei batimetri sering disebut dengan istilah pemeruman yaitu proses dan
aktivitas yang ditujukan untuk memperoleh gambaran bentuk permukaan dasar
perairan (seabed surface). Bentuk permukaan yang dimaksud hanya sebatas pada
konfigurasinya saja, tidak sampai pada kandungan materialnya ataupun biota yang
tumbuh di atasnya (Poerbandono dan Djunarsjah, 2005). Dalam survei batimetri salah
satu ketentuan teknis yang berlaku internasional adalah ketentuan IHO (International
Hydrographic Organization). Peta batimetri harus memiliki sebuah datum vertikal,
Datum vertikal adalah referensi sebagai dasar pengukuran ketinggian atau kedalaman.
Peta batimetri umumnya menggunakan suatu bidang air rendah (Chart Datum) sebagai

16
bidang referensi tinggi, sehingga semua kedalaman yang diperhatikan pada peta laut
mengacu pada pasut rendah (low tide).
I.5.3.1. Kegiatan survei batimetri. Dalam survei batimetri pengukuran
kedalaman titik pemeruman (h) dilakukan secara simultan dengan pengukuran posisi
horizontal titik-titik pemeruman (X,Y). Pengukuran kedalaman dilakukan dengan alat
ukur kedalaman yang menggunakan gelombang akustik yaitu alat echosounder.
Metode akuisisi data yang diperoleh dari pengukuran dengan alat echosounder adalah
selang waktu gelombang mulai dipancarkan dan gelombang kembali diterima oleh
alat, sehingga diperoleh data kedalaman yang dicatat alat perekam merupakan fungsi
selang waktu. Sebagaimana diuraikan dalam persamaan I.25 untuk menentukan
kedalaman laut yang terukur pada saat pengukuran dapat diketahui dengan persamaan
I.25 (Poerbandono dan Djunarsjah 2005).
𝑑 =1
2∫ 𝑣
𝑡1
𝑡2(𝑡). 𝑑𝑡 .................................................................................... (I.25)
Keterangan:
d : kedalaman laut yang terukur pada saat pengukuran,
v(t) : cepat rambat gelombang suara di air,
t1 dan t2 : waktu pada saat gelombang suara dipancarkan dan saat penerimaan
gelombang pantulnya.
Penentuan posisi titik pemeruman dalam survei batimetri merupakan peran
yang sangat penting. Beberapa metode dalam penentuan posisi horizontal (X,Y) titik-
titik pemeruman dengan gelombang elektromagnetik (satellite receiver) yang
dipasang pada kapal survei. Metode yang digunakan dapat berupa metode GPS absolut
maupun metode differential GPS (Poerbandono 2005). Pada pekerjaan ini penentuan
posisi horizontal menggunakan sistem satelit yang disebut dengan DGPS (Differential
Global Positioning System).
Faktor lain yang mempengaruhi pengukuran batimetri adalah dinamika media
air laut berupa pasang surut laut. Pada pengukuran kedalaman dasar laut perlu
dilakukan tiga pengukuran sekaligus pada waktu yang bersamaan yaitu pengukuran
kedalaman, pengukuran posisi alat ukur kedalaman (posisi horizontal) dan pengukuran
pasang surut. Dari ketiga data tersebut akan menjadi informasi kedalaman pada posisi
fix terhadap suatu bidang referensi.
17
I.5.3.2. Penentuan kedalaman titik pemeruman. Penentuan kedalaman titik
pemeruman merupakan suatu proses pengukuran untuk memperoleh nilai suatu
kedalaman yang bertujuan untuk menghasilkan gambaran bentuk topografi dasar
perairan (Poerbandono dan Djunarsjah 2005). Teknologi yang sering digunakan dalam
kegiatan pemeruman adalah Hydro-acoustic, yakni teknologi yang digunakan untuk
mendeteksi bawah perairan menggunakan gelombang akustik. Alat survei batimetri
yang menggunakan teknologi akustik adalah echosounder.
Perangkat echosounder terdiri dari alat perekam data, tranducer (pemancar),
hidrofon (penerima), dan catu daya. Cara kerja dari perangkat ini untuk memperoleh
nilai kedalaman yaitu tranducer memancarkan gelombang akustik secara vertikal
menuju dasar perairan dengan frekuensi tertentu, kemudian gelombang akustik
tersebut dipantulkan kembali oleh dasar perairan dan diterima oleh hidrofon. Data
yang dihasilkan dari proses tersebut adalah selang waktu dari gelombang dipancarkan
hingga gelombang diterima kembali. Nilai kecepatan rambat gelombang di air adalah
1500 m/detik, maka nilai kedalaman perairan dapat di tentukan berdasarkan persamaan
(I.26) berikut ini (Poerbandono dan Djunarsjah 2005):
𝑑 = 1
2(𝑣. Δt) …………………………………………………………… (I.26)
Keterangan:
d : kedalaman laut yang terukur pada saat pengukuran,
v : cepat rambat gelombang akustik di medium air (meter/detik),
Δt : selang waktu antara saat gelombang akustik dipancarkan dan saat
gelombang kembali diterima (detik).

18
Gambar I.5. Ilustrasi pengukuran kedalaman dengan echosounder
(Sumber: Parikesit 2008)
I.5.3.3. Penentuan posisi horizontal titik-titik pemeruman. Penentuan posisi
horizontal titik-titik pemeruman merupakan hal yang sangat penting, khususnya survei
batimetri. Pada intinya penentuan posisi horizontal yang digunakan pada pekerjaan
survei batimetri dan survei topografi adalah sama. Perbedaannya terletak pada objek
yang diamati. Jika pada survei topografi objek yang diamati dalam kondisi tidak
bergerak, pada survei batimetri objek yang diamati tidak dapat diam, sehingga objek
selalu dalam keadaan bergerak.
Dalam menentukan posisi horizontal terdapat beberapa metode, salah satunya
metode penentuan posisi horizontal menggunakan gelombang elektromagnetik, yaitu
dengan menggunakan receiver gelombang elektromagnetik yang dipancar oleh Satelit
GNSS, yang kemudian disebut receiver GPS, yang dipasangkan pada kapal. Terdapat
dua metode penentuan posisi horizontal menggunakan sinyal satelit GNSS, yakni
metode absolut dan metode differential.
Metode absolut merupakan metode yang sering digunakan dalam keperluan
praktis (Gambar I.6). Metode ini hanya memerlukan satu buah receiver GNSS.
Penentuan posisi secara absolut menggunakan data pseudorange yang berisi 4
parameter yang harus ditentukan yaitu parameter koordinat (X,Y,Z) dan parameter
kesalahan jam receiver GPS. Berdasarkan alasan tersebut, maka diperlukan minimal 4
buah satelit yang harus ditangkap oleh receiver (Abidin 2000).
19
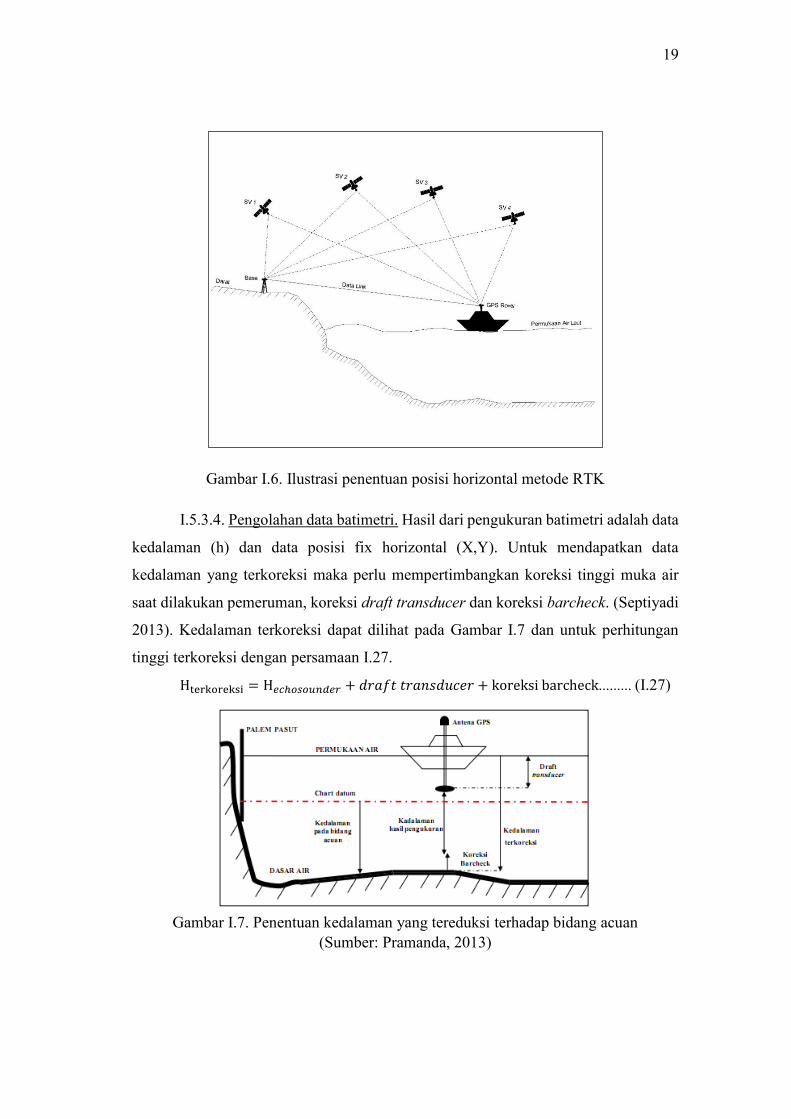
Gambar I.6. Ilustrasi penentuan posisi horizontal metode RTK
I.5.3.4. Pengolahan data batimetri. Hasil dari pengukuran batimetri adalah data
kedalaman (h) dan data posisi fix horizontal (X,Y). Untuk mendapatkan data
kedalaman yang terkoreksi maka perlu mempertimbangkan koreksi tinggi muka air
saat dilakukan pemeruman, koreksi draft transducer dan koreksi barcheck. (Septiyadi
2013). Kedalaman terkoreksi dapat dilihat pada Gambar I.7 dan untuk perhitungan
tinggi terkoreksi dengan persamaan I.27.
Hterkoreksi = H𝑒𝑐ℎ𝑜𝑠𝑜𝑢𝑛𝑑𝑒𝑟 + 𝑑𝑟𝑎𝑓𝑡 𝑡𝑟𝑎𝑛𝑠𝑑𝑢𝑐𝑒𝑟 + koreksi barcheck......... (I.27)
Gambar I.7. Penentuan kedalaman yang tereduksi terhadap bidang acuan
(Sumber: Pramanda, 2013)

20
Pada Gambar I.7. dapat terlihat cara untuk memperoleh angka kedalaman yang
terkoreksi ke bidang acuan tinggi (Chart Datum). Untuk membedakan dengan angka
ketinggian maka angka kedalaman harus bernilai negatif. Penentuan nilai kedalaman
titik-titik pemeruman dapat diketahui dengan persamaan I.28.
Hreduksi = (S0 − 𝐶𝐷) − Hterkoreksi ........................................................ (I.28)
Untuk menunjukkan nilai kedalaman maka Hreduksi bernilai negatif. Hreduksi
digunakan untuk keperluan pembuatan garis kontur kedalaman, sedangkan untuk
pembuatan DTM (Digital Terrain Model) digunakan nilai Z (angka ketinggian). Nilai
Z ini diperoleh dengan persamaan I.29.
Z = 𝐶𝐷 − Hreduksi ................................................................................... (I.29)
I.5.3.5. Uji kualitas hasil data pemeruman. Hasil survei batimetri adalah nilai
kedalaman yang terukur, nilai kedalaman tersebut perlu dilakukan uji kualitas. Acuan
yang digunakan untuk menentukan batas toleransi kesalahan nilai beda kedalaman
yaitu IHO SP-44 tahun 2008 dengan tingkat kepercayaan 95%. Adapun persamaan
I.30 yang digunakan untuk menghitung batas toleransi kesalahan nilai beda kedalaman
sebagai berikut:
±√𝑎2 + (𝑏 𝑥 𝑑)2 ..................................................................................... (I.30)
dimana:
a : kesalahan independent,
b : faktor kesalahan kedalaman yang dependent,
d : kedalaman rata-rata,
(bxd) : kesalahan kedalaman yang dependent (jumlah semua kesalahan kedalaman
yang dependent).
Dalam hal ini, nilai a dan b disesuaikan dengan orde survei berdasarkan tabel standar
IHO untuk survei hidografi, tabel tersebut dapat dilihat pada Lampiran A.
Pada uji kualitas terlebih dahulu disumsikan bahwa kedalaman lajur utama (Hlu)
nilainya sama dengan kedalaman lajur silang (Hls) yang berada pada posisi koordinat
horizontal yang sama. Kemudian dilakukan perhitungan standar deviasi dari data tersebut,
proses perhitungan disajikan pada persamaan I.31 sampai persamaan I.34 (Mikhail, dkk.
1981).
Hlu - Hls = H .......................................................................................... (I.31)

21
𝜇𝑈 − 𝜇𝑆 = 𝛿 ............................................................................................ (I.32)
Mean error:
�̅� =1
2∑(𝐻𝑙𝑢 − 𝐻𝑙𝑠) ............................................................................... (I.33)
Standard deviation:
𝜎 = ±√∑ (𝐻𝑖−𝐻)2𝑠
𝑖=1
𝑛−1 ................................................................................... (I.34)
Keterangan:
Hlu : kedalaman lajur utama
Hls : kedalaman lajur silang
�̅� : nilai true value (beda kedalaman yang sebenarnya=0)
Hi : beda nilai kedalaman lajur utama dan lajur silang
𝜎 : standar deviasi
𝛿 : selisih kedalaman
Uji kualitas dilanjutkan dengan menghitung nilai kesalahan data beda kedalaman
dengan tingkat kepercayaan 95% yang mengacu pada IHO SP-44 tahun 2008 yaitu
sebesar 1,96 x σ (simpangan baku). Jika nilai kesalahan data beda kedalaman masih dalam
batas toleransi kedalaman, maka kualitas sampel data kedalaman masuk dalam toleransi
yang merujuk pada IHO SP-44 tahun 2008. Sedangkan jika nilai kesalahan data beda
kedalaman diluar batas toleransi kedalaman, maka kualitas sampel data kedalaman tidak
masuk dalam toleransi.
I.5.3.6. Peta batimetri. Peta batimetri adalah peta yang menggambarkan bentuk
konfigurasi dasar laut dinyatakan dengan angka-angka kedalaman dan garis-garis
kedalaman yang diukur terhadap datum vertikal (Chart Datum). Peta batimetri
diperlukan untuk mengetahui keadaan kedalaman laut sekitar lokasi suatu perairan
(Triatmodjo 1999).
Data informasi yang diberikan oleh peta batimetri:
1. Bentuk garis pantai (kontur),
2. Kedalamam peta,
3. Muka surutan,
4. Informasi peta (No.peta, judul peta, skala peta, koreksi peta, legenda, proyeksi peta
dan satuan kedalaman laut serta informasi kelengkapan peta lainya),
22
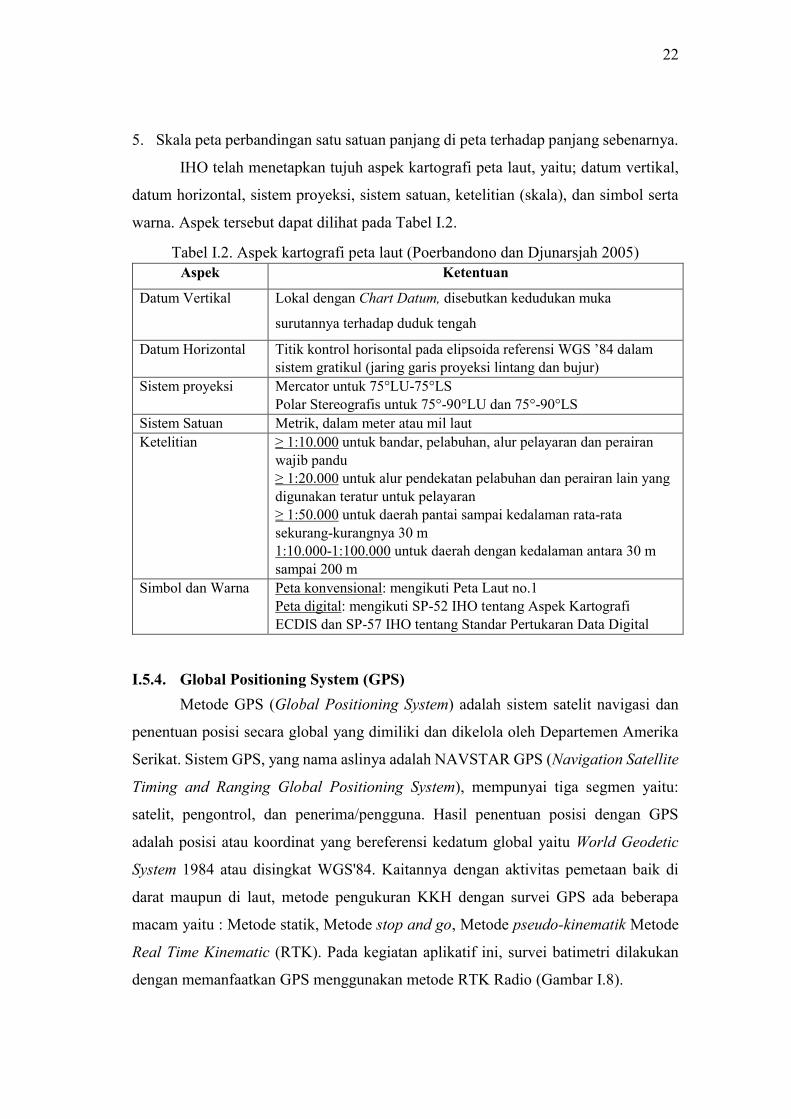
5. Skala peta perbandingan satu satuan panjang di peta terhadap panjang sebenarnya.
IHO telah menetapkan tujuh aspek kartografi peta laut, yaitu; datum vertikal,
datum horizontal, sistem proyeksi, sistem satuan, ketelitian (skala), dan simbol serta
warna. Aspek tersebut dapat dilihat pada Tabel I.2.
Tabel I.2. Aspek kartografi peta laut (Poerbandono dan Djunarsjah 2005)
Aspek Ketentuan
Datum Vertikal Lokal dengan Chart Datum, disebutkan kedudukan muka
surutannya terhadap duduk tengah
Datum Horizontal Titik kontrol horisontal pada elipsoida referensi WGS ’84 dalam
sistem gratikul (jaring garis proyeksi lintang dan bujur)
Sistem proyeksi Mercator untuk 75°LU-75°LS
Polar Stereografis untuk 75°-90°LU dan 75°-90°LS
Sistem Satuan Metrik, dalam meter atau mil laut
Ketelitian ≥ 1:10.000 untuk bandar, pelabuhan, alur pelayaran dan perairan
wajib pandu
≥ 1:20.000 untuk alur pendekatan pelabuhan dan perairan lain yang
digunakan teratur untuk pelayaran
≥ 1:50.000 untuk daerah pantai sampai kedalaman rata-rata
sekurang-kurangnya 30 m
1:10.000-1:100.000 untuk daerah dengan kedalaman antara 30 m
sampai 200 m
Simbol dan Warna Peta konvensional: mengikuti Peta Laut no.1
Peta digital: mengikuti SP-52 IHO tentang Aspek Kartografi
ECDIS dan SP-57 IHO tentang Standar Pertukaran Data Digital
I.5.4. Global Positioning System (GPS)
Metode GPS (Global Positioning System) adalah sistem satelit navigasi dan
penentuan posisi secara global yang dimiliki dan dikelola oleh Departemen Amerika
Serikat. Sistem GPS, yang nama aslinya adalah NAVSTAR GPS (Navigation Satellite
Timing and Ranging Global Positioning System), mempunyai tiga segmen yaitu:
satelit, pengontrol, dan penerima/pengguna. Hasil penentuan posisi dengan GPS
adalah posisi atau koordinat yang bereferensi kedatum global yaitu World Geodetic
System 1984 atau disingkat WGS'84. Kaitannya dengan aktivitas pemetaan baik di
darat maupun di laut, metode pengukuran KKH dengan survei GPS ada beberapa
macam yaitu : Metode statik, Metode stop and go, Metode pseudo-kinematik Metode
Real Time Kinematic (RTK). Pada kegiatan aplikatif ini, survei batimetri dilakukan
dengan memanfaatkan GPS menggunakan metode RTK Radio (Gambar I.8).

23
Gambar I.8. Konsep pengukuran RTK GNSS
(Sumber: Atunggal 2010)
RTK (Real Time Kinematic) merupakan metode berbasiskan pada carier phase
dalam penentuan posisi secara relatif dengan tingkat ketelitian mencapai satuan
centimeter secara real time. Prinsip penentuan posisi secara RTK dengan cara
menggunakan satu stasiun penerima sinyal (referensi/base station) dan beberapa rover
(receiver) yang dapat bergerak. Stasiun referensi penerima sinyal carrier phase dan
unit rover yang bergerak membandingkan pengukuran fase itu sendiri dengan
membandingkan pengukuran fase yang diterima dari stasiun referensi (base stasion)
sehingga nantinya didapat data koreksi yang dibutuhkan untuk pengukurannya secara
Real Time (Wibowo 2013). Ada 3 komponen penting dalam pengukuran
menggunakan metode RTK yaitu (Abidin 2000):
1. Stasiun Referensi
Stasiun referensi atau base station ini terdiri dari receiver dan antena. Base station
ini berfungsi untuk mengolah data differensial dan melakukan koreksi carrier
phase yang dikirimkan via radio modem base station ke radio modem rover.
2. Stasiun Rover
Fungsi rover adalah untuk mengidentifikasi satelit-satelit pada daerah pengamatan
dan menerima data differensial dan koreksi carrier phase dari base station. Cara
kerja rover dalam melakukan pengukuran secara RTK dengan cara menggerakkan
rover dari suatu titik ke titik lainnya yang ingin diketahui posisinya. Koreksi
24
carrier phase tersebut dikirim via radio link dengan radio modem antara base
station dan rover sehingga bisa mendapatkan posisi yang lebih teliti.
3. Data Link (Hubungan data) Differensial
Data link ini berfungsi mengirimkan data differensial dan koreksi carrier phase
dari base station ke rover melalui radio modem. Kecepatan radio modem dan band
frekuensi pada base station dan rover harus sama sehingga proses pengiriman data
bisa lancar. Jenis-jenis band frekuensi yang dimanfaatkan dalam survey GPS-RTK
meliputi:
a. UHF (Ultra Height Frequency)
Bekerja pada frekuensi antara 300 Mhz sampai 3 Ghz dengan panjang
gelombang antara 10 cm sampai dengan 1m.
b. VHF (Very Height Frequency)
Bekerja pada frekuensi antara 30 Mhz sampai 300 Mhz dengan panjang
gelombang antara 1 m sampai dengan 10 m.
c. HF (Height Frequency)
Bekerja pada frekuensi antara 3 Mhz sampai 30 Mhz dengan panjang
gelombang antara 10 m sampai dengan 100 m.
I.5.5. Prinsip Dasar Penggabungan Peta Topografi dan Peta Batimetri
Pada kegiatan aplikatif ini mengenai perencanaan pembangunan pelabuhan di
pantai Sumalata akan menggabungan peta topografi dan peta batimetri. Dasar-dasar
penggabungan peta batimetri dan peta topografi harus diperhatikan untuk
menghasilkan sebuah peta yang baik ilustrasi penggabungan peta topografi dan peta
batimetri dapat dilihat pada Gambar I.9.

25
Gambar I.9. Ilustrasi penggabungan peta topografi dan peta batimetri.
Untuk peta topografi tinggi 0 pada peta mengacu terhadap MSL dan Chart
Datum adalah sebagai tinggi 0 peta batimetri. Untuk keperluan kegiatan aplikatif ini
maka perlu dilakukan penyatuan referensi tinggi guna penggabungan peta batimetri
dan peta topografi. Perbedaan tinggi antar Mean Sea Level dan Chart Datum
ditunjukkan dengan nilai surutan peta (Zo).
I.5.6. SNI 19-6726-2002
SNI 19-6726-2002 tentang peta dasar lingkungan pantai Indonesia skala
1:50000. Standar Nasional Indonesia ini merupakan usaha realisasi program jangka
panjang dalam pembuatan peta dasar LPI seluruh wilayah pantai Indonesia skala
1:50000 sebanyak lebih kurang 1200 Nomor Lembar Peta. Pedoman ini merupakan
salah satu realisasi penediaan standar nasional untuk pmbuatan peta dasar LPI (SNI
19-6726 2002).
Unsur kartografi yang digunakan dalam kegiatan aplikatif ini mengacu pada
SNI 19-6726-2002 meliputi informasi tepi peta, interval kontur kedalaman, interval
kontur ketinggian, warna kontur, titik tinggi, dan titik kedalaman.

26