teknik instrumentasi fix
TRANSCRIPT

1. PENDAHULUAN
1.1 Latar belakang masalah
Konveyor adalah suatu sistem mekanik yang mempunyai fungsi
memindahkan barang dari satu tempat ke tempat yang lain. Konveyor banyak
dipakai di industri untuk transportasi barang yang jumlahnya sangat banyak dan
berkelanjutan. Konveyor dapat memobilisasi barang dalam jumlah banyak dan
kontinyu dari satu tempat ke tempat lain.
Sistem konveyor paling sering ditemukan di bandara untuk bagasi. Ini
adalah cara mudah untuk menangani ratusan tas dan kargo yang datang melalui
bandara. Akan tetapi pada sistem konveyor yang ada di bandara terdapat
kekurangan, di mana tas dan kargo dari berbagai maskapai penerbangan
tercampur menjadi satu pada sistem konveyor tersebut. Oleh karena itu, pada
kesempatan ini akan dibuat sebuah rancang bangun sederhana dari sistem
konveyor pada bandara, di mana akan ditempatkan sensor cahaya photodioda
untuk membedakan warna dari setiap kubus yang melewati sistem konveyor ini.
Warna hitam dan putih pada kubus ini dianalogikan sebagai benda yang telah
diberi label warna untuk membedakan dari maskapai penerbangan mana benda ini
berasal. Hal ini akan memudahkan dalam pengaturan barang dan kargo di
bandara.
1.2 Perumusan masalah
Dari uraian di atas, diperoleh rumusan masalah sebagai berikut :
1. Apakah metode seleksi warna menggunakan sensor cahaya photodioda dapat
diterapkan untuk sistem simulasi sortir barang ?
2. Bagaimana proses sensing warna dengan menggunakan sensor cahaya
photodioda ?

1.3 Batasan maslah
Adapun batasan masalah dari rancang bangun alat yang akan dibuat adalah
konveyor sederhana ini terbatas pada pemisahan antara kubus berwarna hitam dan
kubus berwarna putih.
1.4 Tujuan
Tujuan dari pembuatan rancang bangun alat ini adalah :
1. Membangun sistem simulasi sortir barang dengan menggunakan konveyor dan
sensor cahaya photodioda.
2. Menguji proses sensing warna dari sensor cahaya photodioda.
1.5 Hipotesa
Adapun hipotesa yang diajukan pada pembuatan rancang bangun alat ini
adalah bahwa dengan menggunakan sensor cahaya photodioda dapat diterapkan
pada simulasi sistem sortir barang berdasarkan warna hitam dan putih.
1.6 Metodologi penyelesaian masalah
Metodologi penelitian yang digunakan dalam pembuatan rancang bangun
alat ini adalah sebagai berikut :
1. Studi Pustaka
Pada tahap ini dilakukan pencarian sumber – sumber bacaan mengenai cara
kerja sensor cahaya photodioda, motor servo, mikrokontroler, serta cara
pembuatan konveyor sederhana melalui buku - buku referensi dan jurnal
maupun referensi lain yang terdapat di internet yang mendukung pembuatan
sistem ini.
2. Analisa Kebutuhan dan Perancangan Sistem
Pada tahap ini dilakukan analisis terhadap kebutuhan sistem yang akan
dibangun, kemudian melakukan perancangan sistem sesuai dengan hasil
analisis yang telah dilakukan.
3. Implementasi dan Pengujian Sistem
Pada tahap ini akan dilakukan pembangunan sistem berdasarkan perancangan
yang telah dilakukan sebelumnya. Sistem akan dibangun, kerja sensor cahaya

photodioda akan diuji agar dapat diketahui hasil sensing sensor tersebut
terhadap warna hitam dan putih.
4. Analisis Hasil Pengujian
Keluaran yang dihasilkan sistem dari tahap pengujian yang akan diukur adalah
keakurasian pergerakkan konveyor antara hasil sensing sensor cahaya
photodioda terhadap warna kubus.
5. Penyusunan Laporan Akhir
Pada tahap ini dilakukan pengambilan kesimpulan terhadap hasil analisis dari
tahap sebelumnya, kemudian dibuat dokumentasinya yaitu berupa laporan
akhir.
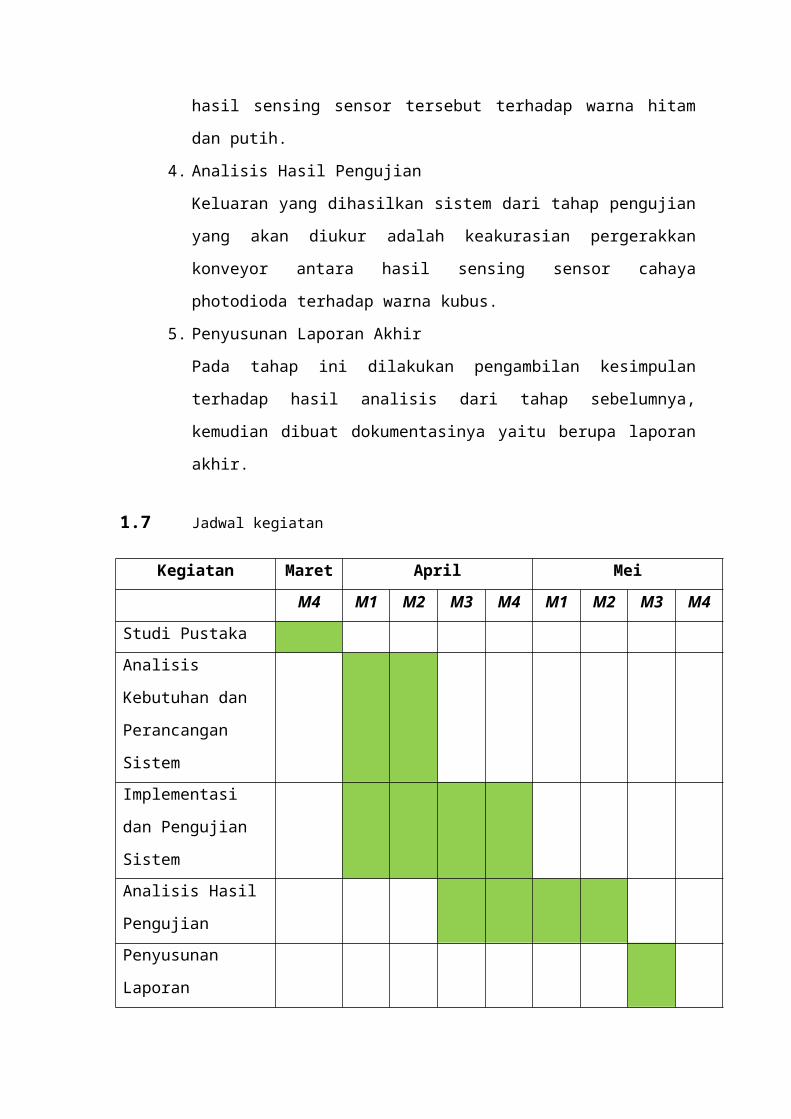
1.7 Jadwal kegiatan
Kegiatan Maret April Mei
M4 M1 M2 M3 M4 M1 M2 M3 M4
Studi Pustaka
Analisis Kebutuhan
dan Perancangan
Sistem
Implementasi dan
Pengujian Sistem
Analisis Hasil
Pengujian
Penyusunan Laporan
Jadwal kegiatan yang direncanakan dalam penelitian ini mengacu pada
metodologi penelitian yang digunakan dan perencanaan jadwal kegiatan tersebut
adalah sebagai berikut :
Tabel 1.1 Jadwal Kegiatan
2. TINJAUAN PUSTAKA
2.1 Sensor Cahaya Photodioda
Photodioda adalah dioda yang bekerja berdasarkan intensitas cahaya, jika
photodioda terkena cahaya maka photodioda bekerja seperti dioda pada umumnya,
tetapi jika tidak mendapat cahaya maka photodioda akan berperan seperti resistor
dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir.
Photodioda merupakan sensor cahaya semikonduktor yang dapat
mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah
dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya
yang dapat dideteksi oleh photodioda ini mulai dari cahaya infra merah, cahaya
tampak, ultra ungu sampai dengan sinar-X.
Prinsip kerja, karena photodioda terbuat dari semikonduktor p-n junction
maka cahaya yang diserap oleh photodioda akan mengakibatkan terjadinya
pergeseran foton yang akan menghasilkan pasangan electron-hole dikedua sisi
dari sambungan. Ketika elektron-elektron yang dihasilkan itu masuk ke pita
konduksi maka elektron-elektron itu akan mengalir ke arah positif sumber
tegangan sedangkan hole yang dihasilkan mengalir ke arah negatif sumber
tegangan sehingga arus akan mengalir di dalam rangkaian. Besarnya pasangan
elektron ataupun hole yang dihasilkan tergantung dari besarnya intensitas cahaya
yang diserap oleh photodioda.
Sifat dari Photodioda adalah :
1. Jika terkena cahaya maka resistansi nya berkurang
2. Jika tidak terkena cahaya maka resistansi nya meningkat.

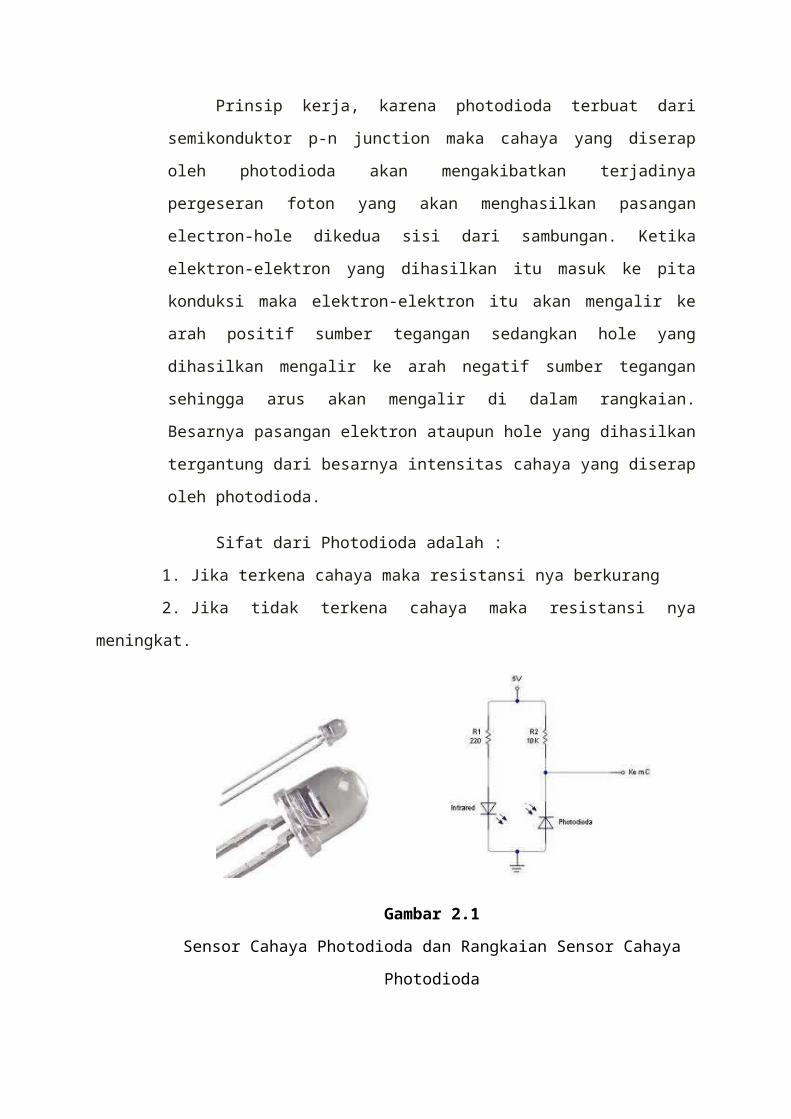
Gambar 2.1
Sensor Cahaya Photodioda dan Rangkaian Sensor Cahaya Photodioda
2.2 Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah ( CW dan CCW )
di mana arah dan sudut pergerakkan rotornya dapat dikendalikan hanya dengan
memberikan duty cycle sinyal PWM pada bagian pin kontrolnya. Motor servo
terdiri dari berbagai jenis, di antaranya adalah motor servo standar 180⁰ dan motor
servo continuous.
Motor servo standar 180⁰ hanya mampu bergerak dua arah ( CW dan
CCW ) dengan defleksi masing - masing sudut mencapai 90⁰ sehingga total
defleksi sudut dari kanan - tengah - kiri adalah 180⁰. Sedangkan motor servo
continuous mampu bergerak dua arah ( CW dan CCW ) tanpa batasan defleksi
sudut putar ( dapat berputar secara kontinyu ). Berikut ini adalah gambaran dari
motor servo.
Gambar 2.2 Motor Servo
2.3 Mikrokontroler
Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC.
IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
RAM, ROM, Port IO. Berbeda dengan PC yang dirancang untuk kegunaan umum,
mikrokontroler digunakan untuk tugas atau fungsi khusus yaitu mengontrol sistem
tertentu.
Gambar 2.3 Mikrokontroler
2.4 Sumber Cahaya LED
LED adalah salah satu jenis dioda maka LED memiliki 2 kutub yaitu
anoda dan katoda. Dalam hal ini LED akan menyala bila ada arus listrik mengalir
dari anoda menuju katoda. Pemasangan kutub LED tidak boleh terebalik karena
apabila terbalik kutubnya maka LED tersebut tidak akan menyala. LED memiliki
karakteristik berbeda-beda menurut warna yang dihasilkan. Semakin tinggi arus
yang mengalir pada LED maka semakin terang pula cahaya yang dihasilkan,
namun perlu diperhatikan bahwa besarnya arus yang diperbolehkan 10mA-20mA
dan pada tegangan 1,6V – 3,5 V menurut karakter warna yang dihasilkan.
Apabila arus yang mengalir lebih dari 20mA maka LED akan terbakar. Untuk
menjaga agar LED tidak terbakar perlu kita gunakan resistor sebagai penghambat
arus.

Gambar 2.4 LED
BAB III
PERANCANGAN SISTEM
ALAT SORTIR BARANG BERBASIS PHOTODIODA
4.1 Deskripsi Alat Sortir Barang
Alat Sortir Barang Berbasis Photodioda ini terdiri dari beberapa bagian dengan fungsinya
masing – masing, diantaranya :
Sistem Konveyor : berfungsi untuk mobilitas barang berwarna (hitam dan
putih)
Sensor : berfungsi untuk mensensing barang yang melewati
konveyor, sensor yang digunakan adalah photodioda
Sistem Kontrol : berfungsi untuk mengolah data yang dihasilkan dari
proses sensor
Aktuator : berfungsi untuk menggerakan palang / pintu yang
terletak diakhir konveyor sehingga barang dapat terpisah ke kiri
atau ke kanan
Gambar 3.1 Blok diagram sistem

4.1.1 Sistem Konveyor
Sistem ini terdiri dari motor DC, belt konveyor dan dudukan konveyor. Motor DC
menyebabkan konveyor dapat berputar dan memobilisasi barang.
Gambar 3.2 Sistem Konveyor
4.1.2 Sensor
Sensor yang digunakan adalah photodioda dan LED merah sebagai sumber cahaya.
Sensor akan memberikan nilai adc yang berbeda untuk benda berwarna hitam dan berwarna
putih. Sensor ini diletakan di atas konveyor sehingga dapat mensensing benda yang lewat dari
atas. Pada Gambar 4.2 sebelah kiri photodioda mendapatkan sedikit pantulan cahaya dari
LED karena warna hitam lebih banyak menyerap cahaya, sedangkan pada gambar sebelah
kanan photodioda mendapatkan lebih banyak cahaya jika mengenai benda berwarna putih.
Gambar 3.3 Cara kerja sensor photodioda
Gambar 3.4 Sensor Photodioda
Gambar 3.5 Rangkaian sensor diletakan diatas konveyor
4.1.3 Sistem Kontrol
Sistem kontrol yang digunakan adalah mikrokontroler ATMEGA 8535. Perbedaan
tegangan ketika mengenai warna putih dan warna hitam yang dihasilkan dari proses sensing
dihubungkan pada port ADC pada mikrokontroller. Data dari port ADC akan diolah pada
sistem kontrol, yang akan mengkalkulasi berapa putaran motor ke kanan dan kekiri yang
dihubungkan dengan palang diujung konveyor.

Gambar 3.6 Sistem Minimum
4.1.4 Aktuator Motor Servo
Motor servo ini dihubungkan ke palang pembatas sehingga putaran motor akan
mempengaruhi pergerakan palang.
Jika benda berwarna hitam maka benda akan dipisahkan ke kiri (motor bergerak ke
kanan) sedangkan benda berwarna putih akan dipisahkan ke kanan (motor bergerak ke kiri).

BAB IV
PEMBAHASAN DAN ANALISA
4.1 Data Karakterisasi
Sebelum menghubungkan rangkaian sensor terhadap sistem minimum melalui port ADC,
terlebih dahulu dilakukan karakterisasi sensor terhadap berbagai warna. Dalam merancang
alat sortir barang berdasarkan warna ini kami menggunakan 3 buah sensor photodiode.
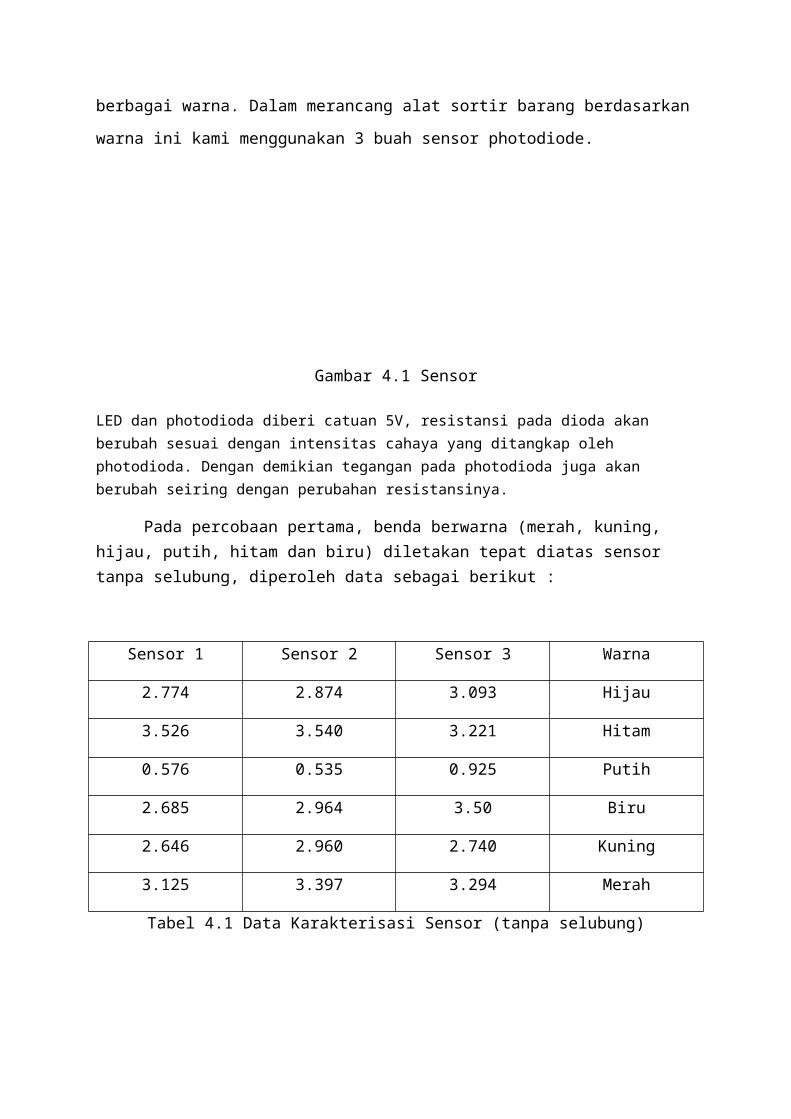
Gambar 4.1 Sensor
LED dan photodioda diberi catuan 5V, resistansi pada dioda akan berubah sesuai dengan intensitas cahaya yang ditangkap oleh photodioda. Dengan demikian tegangan pada photodioda juga akan berubah seiring dengan perubahan resistansinya.
Pada percobaan pertama, benda berwarna (merah, kuning, hijau, putih, hitam dan biru) diletakan tepat diatas sensor tanpa selubung, diperoleh data sebagai berikut :
Sensor 1 Sensor 2 Sensor 3 Warna
2.774 2.874 3.093 Hijau
3.526 3.540 3.221 Hitam
0.576 0.535 0.925 Putih
2.685 2.964 3.50 Biru
2.646 2.960 2.740 Kuning
3.125 3.397 3.294 Merah
Tabel 4.1 Data Karakterisasi Sensor (tanpa selubung)

Kemudian pada percobaan kedua, benda berwarna (merah, kuning, hijau, putih, hitam dan biru) diletakan tepat diatas sensor dengan selubung, diperoleh data sebagai berikut :
Sensor 1 Sensor 2 Sensor 3 Warna
3.126 3.243 3.142 Hijau
3.540 3.692 3.656 Hitam
0.928 1.247 1.281 Putih
3.193 3.335 3.276 Biru
2.708 2.945 2.826 Kuning
3.225 3.428 3.383 Merah
Tabel 4.2 Data Karakterisasi Sensor (dengan selubung)
Dari data diatas hanya diketahui Tegangan pada photodioda (Vpho) namun kita dapat menghitung resistansi photodioda berdasarkan warna dengan menggunakan rumus pembagi tegangan.
Vpho = Rpho / Rpho + 4,7k . 5V
Dengan menggunakan rumus diatas maka didapat resistansi photodioda berdasarkan warna sebagai berikut
WarnaResistansi Photodioda
Hijau 8143,87
Hitam 12444,94
Putih 1590,15
Biru 8868,129
Kuning 6111,225
Merah 9502,256
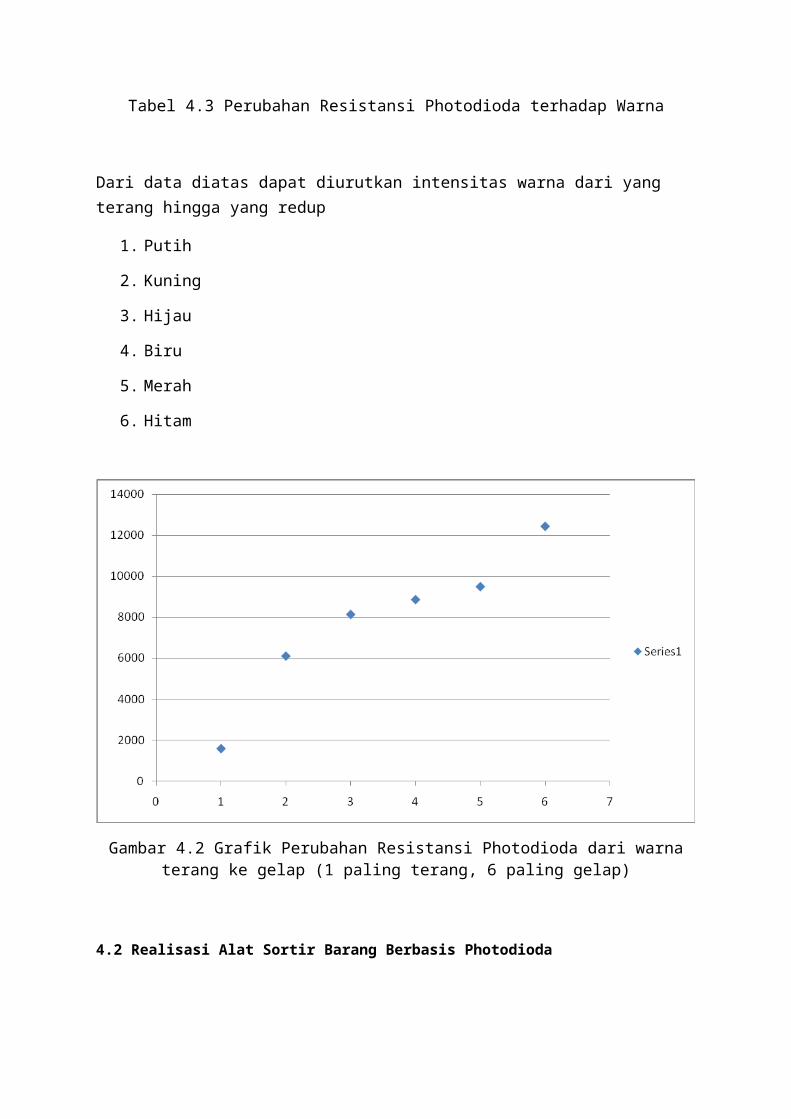
Tabel 4.3 Perubahan Resistansi Photodioda terhadap Warna
Dari data diatas dapat diurutkan intensitas warna dari yang terang hingga yang redup
1. Putih

2. Kuning
3. Hijau
4. Biru
5. Merah
6. Hitam
Gambar 4.2 Grafik Perubahan Resistansi Photodioda dari warna terang ke gelap (1 paling terang, 6 paling gelap)
4.2 Realisasi Alat Sortir Barang Berbasis Photodioda
Pada realisasinya warna yang kami gunakan adalah warna hitam dan putih, hitam dengan nilai
tegangan sekitar 3,5 V – 4 V dan putih dengan nilai tegangan 0,8 V – 1,4 V. Dengan perbedaan
tegangan yang cukup jauh maka dengan mudah untuk menentukan nilai ADC yang akan diinputkan
pada sistem mikrokontroller.
Hitam : ADC > 600
Putih : ADC < 600
/*****************************************************
This program was produced by the
CodeWizardAVR V2.05.3 Standard
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 11-May-2013
Author : Paijo
Company : ittelkom
Comments:
Chip type : ATmega8535
Program type : Application
AVR Core Clock frequency: 11.059200 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*****************************************************/
#include <mega8535.h>
#include <stdio.h>
#include <delay.h>
// Alphanumeric LCD functions
#include <alcd.h>
#define ADC_VREF_TYPE 0x00
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)

{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCW;
}
// Declare your global variables here
char i;
char temp [32];
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0xFF;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer1 Stopped
// Mode: Normal top=0xFFFF
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// USART initialization
// USART disabled
UCSRB=0x00;
// Analog Comparator initialization
// Analog Comparator: Off

// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 691.200 kHz
// ADC Voltage Reference: AREF pin
// ADC High Speed Mode: Off
// ADC Auto Trigger Source: ADC Stopped
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x84;
SFIOR&=0xEF;
// SPI initialization
// SPI disabled
SPCR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
// Alphanumeric LCD initialization
// Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu:
// RS - PORTC Bit 0
// RD - PORTC Bit 1
// EN - PORTC Bit 2
// D4 - PORTC Bit 4
// D5 - PORTC Bit 5
// D6 - PORTC Bit 6
// D7 - PORTC Bit 7
// Characters/line: 16
lcd_init(16);

lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("TEKNIK INSTRUMEN");
lcd_gotoxy(2,1);
lcd_putsf("SORTIR BARANG");
delay_ms(1000);
lcd_clear();
lcd_clear();
lcd_gotoxy(2,0);
lcd_putsf("TEKNIK FISIKA");
lcd_gotoxy(4,1);
lcd_putsf("IT TELKOM");
delay_ms(1000);
lcd_clear();
lcd_clear();
lcd_gotoxy(1,0);
lcd_putsf("Hidupkan Mesin");
lcd_gotoxy(4,1);
lcd_putsf("Konveyor");
delay_ms(1500);
lcd_clear();
while (1)
{
if (read_adc(0)<600)
{
for (i=0;i<180;i++) //sortir putih
{
PORTB.0=1;
delay_us(1300);
PORTB.0=0;
delay_us(18700);
}
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("!!! RUNNING !!!");
delay_ms(10);
}
else if (read_adc(0)>601)//sortir hitam
{
for (i=0;i<40;i++)
{
PORTB.0=1;
delay_us(700);
PORTB.0=0;
delay_us(19300);
}
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("!!! RUNNING !!!");
delay_ms(10);
}
}
}

5. KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang dapat diambil dari pembuatan sortir barang ini adalah
apabila barang yang lewat berwarna hitam, maka cahaya yang dipantulkan dari
LED akan lebih banyak diserap oleh benda dibandingkan cahaya yang dipantulkan
ke sensor photodioda. Dari pembacaan sensor kemudian motor servo bergerak
berdasarkan kondisi yang telah diprogram pada mikrokontroler. Sedangkan
apabila barang yang lewat berwarna putih maka cahaya yang dipantulkan dari
LED akan lebih banyak dipantulkan ke sensor photodioda dibandingkan cahaya
yang diserap oleh benda tersebut.
5.2 Saran
Berdasarkan data hasil pengukuran dan pengujian perlu diperhatikan
beberapa aspek untuk mengoptimalkan kerja alat, seperti penempatan sensor,
konveyor yang digunakan dan pergerakan dari motor servo.