solusi numerik masalah kontrol optimum … · pada karya ilmiah ini, model matematika sir digunakan...
TRANSCRIPT

SOLUSI NUMERIK MASALAH KONTROL OPTIMUM
PENYEBARAN PENYAKIT INFLUENZA A
SYAHRUL AGUS NASIFA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2014


PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Solusi Numerik
Masalah Kontrol Optimum Penyebaran Penyakit Influenza A adalah benar karya
saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk
apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau
dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah
disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir
skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut
Pertanian Bogor.
Bogor, Juli 2014
Syahrul Agus Nasifa
G54090030

ABSTRAK
SYAHRUL AGUS NASIFA. Solusi Numerik Masalah Kontrol Optimum
Penyebaran Penyakit Influenza A. Dibimbing oleh TONI BAKHTIAR dan ALI
KUSNANTO.
Influenza A merupakan penyakit pernapasan akut yang disebabkan oleh
virus H1N1. Penyebaran utama H1N1 adalah melalui udara dan dapat menular
dari manusia ke manusia. Pada karya ilmiah ini, model matematika SIR digunakan
untuk membahas penyebaran H1N1, di mana populasi terbagi ke dalam tiga kelas
yaitu rentan, terinfeksi, dan sembuh. Analisis dilakukan terhadap dua kasus, yaitu
model tanpa dan dengan pemberian kontrol yakni perlakuan vaksinasi. Model
penyebaran H1N1 ini diterapkan di Kabupaten dan Kota Bogor dengan total
populasi sebanyak 6 juta orang. Pada model tanpa kontrol diperoleh dua titik
tetap, kemudian dari nilai batas kestabilan untuk titik tetap bebas penyakit
diperoleh bilangan reproduksi dasar . Penyakit akan menghilang untuk
dan akan mewabah untuk . Pada model dengan pemberian kontrol
diminimumkan banyaknya populasi terinfeksi dan biaya vaksinasi. Solusi numerik
sistem persamaan diferensial taklinear yang diperoleh dari penerapan prinsip
minimum Pontryagin diselesaikan dengan metode Runge-Kutta orde-4. Hasil
simulasi numerik menunjukkan bahwa tanpa pemberian kontrol, bilangan
reproduksi dasar menyebabkan jumlah individu terinfeksi H1N1 lebih
banyak dibandingkan dengan bilangan reproduksi dasar . Pemberian
kontrol menurunkan jumlah individu terinfeksi H1N1 hingga .
Kata kunci: analisis kestabilan, influenza A (H1N1), kontrol optimum, prinsip
minimum Pontryagin, Runge-Kutta orde-4
ABSTRACT
SYAHRUL AGUS NASIFA. Numerical Solution of an Optimal Control Problem
of Transmission of the Influenza A Disease. Supervised by TONI BAKHTIAR
and ALI KUSNANTO.
Influenza A is an acute respiratory disease caused by a virus H1N1. The
virus is mainly transmitted by air and can be contagious from human to human. In
this work, a mathematical model of SIR is used to describe the disease
transmission, where the population is divided into three classes namely
susceptible, infected, and recovered. Analysis was performed on two cases, those
are models without and with control, i.e. vaccination treatments. The model of
H1N1 transmission is applied at regency and city of Bogor with a total population
of six million people. Model without control provides two equilibrium points,
where from stability threshold for disease free equilibrium point is obtained a
basic reproductive number . The disease will die out if and may become
endemic if . On the model with administration of control we minimized the
infected population and the vaccination cost. Numerical solutions of nonlinear
system of differential equations derived from the conditions of Pontryagin
minimum principle are conducted by Runge-Kutta 4th order method. The results

of numerical simulation show that the model without control administration, basic
reproductive number causes more infected individuals than that of
. Meanwhile, the effect of the treatment above decreased the number of
H1N1 infected down to .
Keywords: stability analysis, influenza A (H1N1), optimal control, Pontryagin
minimum principle, Runge-Kutta 4th order

Skripsi
sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains
pada
Departemen Matematika
SOLUSI NUMERIK MASALAH KONTROL OPTIMUM
PENYEBARAN PENYAKIT INFLUENZA A
SYAHRUL AGUS NASIFA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2014


Judul Skripsi : Solusi Numerik Masalah Kontrol Optimum Penyebaran Penyakit
Influenza A
Nama : Syahrul Agus Nasifa
NIM : G54090030
Disetujui oleh
Dr Toni Bakhtiar, MSc
Pembimbing I
Drs Ali Kusnanto, MSi
Pembimbing II
Diketahui oleh
Dr Toni Bakhtiar, MSc
Ketua Departemen
Tanggal Lulus:
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas
segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang
dipilih dalam penelitian yang dilaksanakan sejak bulan Mei 2013 ini ialah kontrol
optimum, dengan judul Solusi Numerik Masalah Kontrol Optimum Penyebaran
Penyakit Influenza A.
Terima kasih penulis ucapkan kepada Bapak Dr. Toni Bakhtiar, M.Sc dan
Bapak Drs. Ali Kusnanto, M.Si selaku pembimbing, serta Bapak Ir. Ngakan
Komang Kutha Ardana, M.Sc selaku penguji ujian skripsi yang telah banyak
memberi saran. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta
seluruh keluarga, atas segala doa dan kasih sayangnya. Di samping itu, ungkapan
terima kasih penulis sampaikan kepada Lola Oktasari, lalu rekan satu bimbingan
(Meda, Sonia, Sevira, bang Chastro dan Kak Vivi), teman belajar kompre
(Syaepul, Rio, Qowi, Ichsan, Galih, Nisa dan Windi), teman-teman Matematika
46, adik-adik Matematika angkatan 47, 48, dan 49 dan semua pihak yang turut
berpartisipasi dalam penelitian ini.
Semoga karya ilmiah ini bermanfaat.
Bogor, Juli 2014
Syahrul Agus Nasifa
DAFTAR ISI
DAFTAR TABEL
DAFTAR GAMBAR
DAFTAR LAMPIRAN
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 1
LANDASAN TEORI 2
Sistem Persamaan Diferensial 2
Titik Tetap 2
Pelinearan 2
Nilai Eigen dan Vektor Eigen 3
Kestabilan Titik Tetap 3
Runge-Kutta Orde-4 4
Bilangan Reproduksi Dasar 4
Kontrol Optimum 4
Prinsip Minimum Pontryagin 5
MODEL PENYEBARAN VIRUS H1N1 6
Persamaan Model H1N1 6
Penentuan Titik Tetap Model 8
Analisis Kestabilan Titik Tetap 9
MASALAH KONTROL OPTIMUM 11
SIMULASI NUMERIK 13
Nilai Parameter 13
Hasil Simulasi 14
SIMPULAN 21
DAFTAR PUSTAKA 21
LAMPIRAN 23
RIWAYAT HIDUP 33

DAFTAR TABEL
1 Kondisi kestabilan titik tetap 11 2 Nilai-nilai parameter 14 3 Nilai awal untuk model penyebaran virus H1N1 14
DAFTAR GAMBAR
1 Kompartemen model penyebaran virus H1N1 tanpa kontrol 7 2 Kompartemen model penyebaran virus H1N1 dengan kontrol 8
3 Dinamika populasi terinfeksi tanpa dan dengan kontrol untuk 15
4 Dinamika populasi terinfeksi tanpa dan dengan kontrol untuk 15
5 Dinamika populasi terinfeksi tanpa kontrol untuk dan
16
6 Dinamika populasi rentan tanpa dan dengan kontrol untuk 17
7 Dinamika populasi rentan tanpa dan dengan kontrol untuk 17
8 Dinamika populasi sembuh tanpa dan dengan kontrol untuk 18
9 Dinamika populasi sembuh tanpa dan dengan kontrol untuk 18
10 Kontrol optimum 19 11 Dinamika populasi individu terinfeksi dengan kontrol untuk
, , dan 20
DAFTAR LAMPIRAN
1 Bukti teorema 1 (prinsip minimum Pontryagin) 23
2 Penentuan titik tetap 24 3 Analisis kestabilan titik tetap dan nilai bilangan reproduksi dasar 26 4 M-file Matlab Runge-Kutta orde-4 28

PENDAHULUAN
Latar Belakang
Influenza A (H1N1) merupakan penyakit pernapasan akut pada manusia
yang memengaruhi hidung, tenggorokan, dan paru-paru. Penyakit ini disebabkan
oleh virus H1N1 yang merupakan subtipe dari virus influenza A. Virus ini pada
mulanya diketahui beredar di antara populasi babi dan unggas, kemudian
ditemukan dapat menular kepada manusia (Sitepoe 2009).
Pandemi flu merupakan wabah global dari strain baru virus influenza A
H1N1, virus ini sering disebut sebagai “flu babi” di media. Virus ini pertama kali
ditemukan pada April 2009 yang mengandung kombinasi gen dari babi, burung,
dan manusia. Penyebaran virus H1N1 yang paling utama adalah melalui udara (El
Hia et al. 2012).
Pada Juni 2009, organisasi kesehatan dunia (WHO) menyatakan virus H1N1
sebagai pandemi karena sudah memasuki tahap penularan dari manusia ke
manusia dan menyebar keseluruh dunia. Kasus H1N1 di Indonesia sampai pada
tanggal 1 Agustus 2009 terdapat 520 kasus positif H1N1 yang terdiri atas 291
laki-laki dan 229 perempuan (Kompas 2009). Pada 22 November 2009, lebih dari
207 negara telah melaporkan kasus yang dikonfirmasi terinfeksi virus H1N1
(WHO 2009).
Sebagian besar pemerintah dari banyak negara merencanakan untuk
melakukan vaksinasi secara massal sebagai tindakan pencegahan pandemi virus
H1N1. Vaksinasi massal diharapkan dapat mengurangi jumlah individu yang
terinfeksi. Teori kontrol optimum digunakan untuk meminimumkan biaya yang
dikeluarkan selama vaksinasi, meminimumkan populasi yang terinfeksi, dan
menentukan fungsi kontrol ( ) yang optimum.
Pada karya ilmiah ini akan dibahas model penyebaran virus H1N1. Model
untuk penyebaran virus H1N1 yang digunakan adalah model Susceptible Infected
Recovered (SIR) yang dibahas oleh Hattaf dan Yousfi (2009). Model SIR dengan
pemberian kontrol ke dalam sistem dibahas oleh El Hia et al. (2012).
Tujuan Penelitian
Berdasarkan latar belakang di atas, maka tujuan karya ilmiah ini adalah:
1. Merekonstruksi model penyebaran influenza A (H1N1) menggunakan model
SIR dengan dan tanpa kontrol.
2. Menentukan fungsi kontrol yang optimum yang meminimumkan populasi
terinfeksi dan membandingkan nilai bilangan reproduksi dasar yang berbeda
terhadap dinamika populasi dengan dan tanpa kontrol.
3. Membandingkan efek penyembuhan yang berbeda terhadap penurunan
jumlah individu yang terinfeksi setelah pemberian kontrol.
2
LANDASAN TEORI
Pada bagian ini akan dibahas teori-teori yang digunakan untuk menyusun
karya ilmiah ini. Teori-teori tersebut meliputi sistem persamaan diferensial, titik
tetap, pelinearan, kestabilan titik tetap, nilai eigen dan vektor eigen, metode
Runge-Kutta orde-4, bilangan reproduksi dasar, kontrol optimum, dan prinsip
minimum Pontryagin.
Sistem Persamaan Diferensial
Sistem persamaan diferensial orde satu dengan persamaan dan buah
fungsi yang tak diketahui dapat ditulis sebagai berikut
(1)
dengan
(
) (
)
Jika linear maka sistem persamaan diferensial di atas disebut linear dan
sebaliknya jika taklinear.
(Tu 1994)
Titik Tetap
Misalkan diberikan sistem persamaan diferensial sebagai berikut
maka suatu titik yang memenuhi disebut titik kesetimbangan atau
titik tetap dari sistem persamaan diferensial tersebut.
(Tu 1994)
Pelinearan
Analisis kestabilan untuk sistem persamaan diferensial taklinear dilakukan
dengan menggunakan teknik pelinearan. Sistem persamaan diferensial taklinear
didefinisikan sebagai berikut
. (2)
Dengan menggunakan ekspansi Taylor di sekitar titik tetap , maka persamaan
(2) dapat ditulis sebagai berikut
. (3)
Persamaan (3) merupakan bentuk sistem persamaan diferensial taklinear
dengan adalah matriks Jacobi,
[
]

3
dan merupakan suku berorde tinggi yang mempunyai sifat .
Bentuk sistem persamaan diferensial taklinear setelah dilakukan pelinearan
menjadi sebagai berikut
.
(Tu 1994)
Nilai Eigen dan Vektor Eigen
Misalkan adalah matriks berukuran , maka suatu vektor taknol di
disebut vektor eigen dari dan suatu skalar disebut nilai eigen dari jika
berlaku hubungan berikut
(4)
Vektor disebut vektor eigen yang bersesuaian dengan nilai eigen . Nilai
eigen dari matriks berukuran dapat diperoleh dari persamaan (4) yang
dapat dituliskan sebagai berikut:
(5)
di mana adalah matriks identitas. Persamaan (5) mempunyai solusi taknol jika
dan hanya jika
(6)
Persamaan (6) disebut persamaan karakteristik.
(Anton dan Rorres 2004)
Kestabilan Titik Tetap
Diberikan sistem persamaan diferensial sembarang
Analisis kestabilan titik tetap dilakukan dengan menggunakan matriks Jacobi
yaitu matriks . Titik tetap disubstitusikan ke dalam persamaan matriks Jacobi
sehingga diperoleh nilai-nilai eigennya dengan dari
persamaan karakteristik
Secara umum kestabilan titik tetap mempunyai tiga perilaku sebagai berikut:
1. Stabil, jika
a. Setiap nilai eigen real adalah negatif ( untuk semua ). b. Ada komponen bagian real dari nilai eigen kompleks bernilai nol
( ( ) ) untuk sembarang dan untuk semua .
2. Takstabil, jika
a. Ada nilai eigen real yang positif ( untuk suatu ). b. Ada komponen bagian real dari nilai eigen kompleks, lebih besar dari nol
( untuk suatu ). 3. Sadel, jika perkalian dua buah nilai eigen real sembarang adalah negatif
( untuk dan sembarang). Titik tetap sadel ini bersifat takstabil.
(Tu 1994)
4
Runge-Kutta Orde-4
Runge-Kutta adalah salah satu metode yang digunakan untuk menyelesaikan
solusi persamaan diferensial secara numerik. Metode ini dikembangkan sekitar
tahun 1900 oleh matematikawan Jerman C. Runge dan M.W. Kutta.
Perhatikan masalah nilai awal berikut
dengan merupakan fungsi skalar atau vektor yang belum diketahui dan
bergantung pada peubah .
Untuk suatu yang positif yang disebut riap (increment), definisikan
untuk
(7)
dengan
(
)
(
)
Pada skema di atas, merupakan aproksimasi Runge-Kutta orde-4 bagi
.
(Canale dan Chapra 2010)
Bilangan Reproduksi Dasar
Bilangan reproduksi dasar adalah banyaknya individu yang rentan terinfeksi
secara langsung oleh individu lain yang telah terinfeksi. Bilangan reproduksi dasar
dilambangkan dengan . Bilangan reproduksi dasar dapat diperoleh dengan
mencari nilai eigen dari matriks Jacobi yang dihitung pada titik tetap bebas
penyakit.
Beberapa kondisi yang akan muncul yaitu:
1. Jika , maka penyakit akan menghilang.
2. Jika , maka penyakit akan menetap.
3. Jika , maka penyakit akan meningkat menjadi wabah.
(Giesecke 1994)
Kontrol Optimum
Teori kontrol optimum merupakan bagian paling penting yang digunakan
dalam pengoptimuman dinamis. Perkembangan teori kontrol optimum terjadi
dengan sangat pesat sejak diperkenalkan oleh Pontryagin pada tahun 1962.
Masalah kontrol optimum adalah memilih peubah kontrol di antara semua
peubah kontrol yang admissible, yaitu kontrol yang dapat membawa sistem dari
5
state awal pada waktu kepada state akhir pada waktu akhir
sedemikian rupa sehingga memberikan nilai maksimum atau nilai minimum bagi
fungsional objektif.
Populasi dari tiga kelas epidemiologi yaitu kelas rentan, kelas terinfeksi, dan
kelas disembuhkan merupakan peubah state pada karya ilmiah ini. Kemudian
ditambahkan strategi vaksinasi ke dalam sistem untuk menurunkan jumlah
individu yang terinfeksi.
Sistem dinamik dapat dinyatakan secara matematika oleh sistem persaman
diferensial
(8)
dengan merupakan peubah state dan merupakan peubah kontrol.
Keadaan sistem pada waktu diketahui, yaitu , . Jika dipilih
peubah kontrol yang terdefinisi untuk waktu , maka diperoleh
sistem persamaan diferensial orde satu dengan peubah taktentu dan
persamaan (8) mempunyai solusi tunggal karena nilai awal diberikan.
Solusi yang diperoleh merupakan respons terhadap peubah kontrol yang
dilambangkan dengan . Setiap kontrol dan responsnya state
dihubungkan dengan fungsional objektif berikut
∫ [ ]
[ ]
(9)
dengan fungsi yang diberikan, [ ] merupakan fungsi Scrap yang
menggambarkan keadaan sistem di akhir waktu, tidak harus ditentukan dan
mempunyai kondisi tertentu.
Fungsi kontrol yang dapat memaksimumkan atau meminimumkan
fungsional akan ditentukan dari pemilihan terhadap semua fungsi atau peubah
kontrol yang diperoleh. Kontrol yang bersifat demikian disebut kontrol optimum.
Permasalahan kontrol optimum dapat dinyatakan sebagai masalah
memaksimumkan atau meminimumkan suatu fungsional objektif (9) dengan
kendala (8).
(Tu 1993)
Prinsip Minimum Pontryagin
Syarat perlu tercapainya kondisi optimum dalam masalah kontrol optimum
adalah terpenuhinya prinsip minimum Pontryagin. Kontrol optimum dipilih untuk
membawa sistem dinamik (8) dari keadaan awal ke keadaan akhir . Masalah kontrol optimum adalah mengoptimumkan (memaksimumkan
atau meminimumkan) fungsional objektif (9). Prinsip minimum Pontryagin dapat
dilihat pada Teorema 1.
Teorema 1
Misalkan sebagai kontrol admissible yang membawa state awal
( ) ke keadaan yang diinginkan state akhir ( ), di mana dan
secara umum tidak ditentukan. Trajektori dari sistem yang berkaitan dengan dimisalkan berupa , agar kontrol merupakan kontrol optimum maka
perlu terdapat fungsi vektor sedemikian sehingga

6
1.
2.
dan merupakan solusi dari sistem kanonik.
3.
4.
5. Jika syarat batas dan tidak diberikan, maka syarat
transversalitas berikut harus dipenuhi:
.
Jika dan diketahui, diketahui dan bebas (tidak
diketahui), maka syarat transversalitas menjadi:
.
Jika diberikan syarat tambahan tidak ada fungsi scrap ( ), maka
diperoleh syarat transversalitas sebagai berikut:
.
Bukti untuk teorema dapat dilihat pada Lampiran 1.
(Tu 1993)
MODEL PENYEBARAN VIRUS H1N1
Model matematika yang digunakan untuk membahas masalah penyebaran
virus H1N1 adalah model Susceptible Infected Recovered (SIR). Pada model SIR
populasi dibagi ke dalam tiga kelas epidemiologi yaitu: kelas yang rentan
(susceptible) di mana individu dalam populasi tidak terinfeksi tetapi berisiko
terinfeksi virus, kelas yang terinfeksi (infected) di mana individu telah terinfeksi
dan dapat menularkannya, dan kelas yang disembuhkan (recovered) di mana
individu tidak bisa lagi terjangkit penyakit ini karena telah disembuhkan. Pada
bagian ini akan dibahas persamaan model H1N1, penentuan titik tetap, dan
analisis kestabilan titik tetap.
Persamaan Model H1N1
Model penyebaran virus H1N1 menggunakan tiga asumsi, yaitu:
1. Virus H1N1 akan menular jika ada kontak langsung atau hubungan yang
erat antara individu yang sehat dengan individu terinfeksi.
2. Perekrutan individu baru bersifat konstan ( ).
3. Individu yang telah diberi vaksin atau kontrol akan berpindah ke
populasi yang disembuhkan.
Skema yang menggambarkan hubungan antara kelas rentan, kelas terinfeksi, dan
kelas yang disembuhkan dalam model SIR tanpa kontrol diberikan oleh Gambar 1.

7
Gambar 1 Kompartemen model penyebaran virus H1N1 tanpa kontrol
Berdasarkan skema hubungan antara tiga kelas pada gambar 1, maka model
penyebaran virus H1N1 dibangun dengan mempertimbangkan tiga aspek berikut,
yaitu:
1. Perpindahan populasi dari rentan menjadi terinfeksi
Populasi yang rentan akan berpindah menjadi populasi yang terinfeksi
bergantung kepada tingkat keefektifan kontak antara populasi rentan dengan
populasi terinfeksi dan proporsi individu yang terinfeksi dalam populasi
total (
). Persamaan yang menggambarkan perpindahan populasi yang rentan
menjadi terinfeksi diberikan oleh persamaan
dengan dan adalah parameter konstan dan taknegatif.
2. Penyembuhan populasi yang terinfeksi
Populasi yang terinfeksi akan berpindah menjadi populasi yang
disembuhkan bergantung kepada tingkat penyembuhan . Persamaan untuk
penyembuhan populasi yang terinfeksi diberikan oleh persamaan
dengan adalah parameter konstan dan taknegatif.
3. Kematian alami
Masing-masing populasi akan mati dengan tingkat kematian alami .
Individu terinfeksi juga akan mati disebabkan oleh virus H1N1 dengan
kematian . Persamaan yang mewakili kematian alami dari masing-masing
populasi diberikan oleh persamaan
dengan dan merupakan parameter konstan dan taknegatif.
Model penyebaran virus H1N1 dibangun dengan menggabungkan tiga aspek
di atas, sehingga diperoleh sistem persamaan diferensial taklinear untuk masalah
penyebaran virus H1N1 sebagai berikut
(10)
dengan merupakan tingkat kontak antara individu terinfeksi dengan individu
rentan, merupakan tingkat perekrutan individu baru, merupakan tingkat

8
kematian alami, merupakan tingkat kematian individu terinfeksi disebabkan
oleh virus H1N1, dan merupakan tingkat penyembuhan individu yang terinfeksi.
Nilai awal individu rentan, individu terinfeksi, dan individu disembuhkan bernilai
positif ( , , ) dan menyatakan total populasi pada waktu .
Teori kontrol optimum digunakan untuk mengontrol masalah penyebaran
virus influenza A (H1N1) yaitu dengan memberikan vaksin. Fungsi kontrol
merupakan bagian atau fraksi dari individu rentan yang telah divaksinasi per unit
waktu.
Skema yang menggambarkan hubungan antara kelas rentan, kelas terinfeksi,
dan kelas yang disembuhkan dalam model SIR dengan kontrol diberikan oleh
Gambar 2.
Gambar 2 Kompartemen model penyebaran virus H1N1 dengan kontrol
Model matematika dari masalah penyebaran virus H1N1 setelah diberikan
kontrol diberikan oleh sistem persamaan
(11)
dengan adalah peubah kontrol.
Penentuan Titik Tetap Model
Titik tetap sistem persamaan (10) diperoleh dari
,
, dan
,
sehingga sistem persamaan (10) menjadi:
(12)
(13)
(14)
Solusi yang diperoleh dari persamaan (12), (13), dan (14) merupakan titik
tetap dari sistem persamaan diferensial taklinear tanpa kontrol. Titik tetap yang
diperoleh ada dua, yaitu (
) dan
dengan
9
Titik tetap akan berada di kuadran pertama jika memenuhi:
(15)
(16)
(17)
Agar persamaan (16) dan (17) terpenuhi, maka (18)
Bukti penentuan titik tetap dapat dilihat pada Lampiran 2.
Analisis Kestabilan Titik Tetap
Dengan melakukan pelinearan terhadap persamaan (10), diperoleh matriks
Jacobi berikut
[
]
(19)
Kestabilan titik tetap diperoleh dari nilai eigen yang dihasilkan matriks
Jacobi persamaan (10) yang dievaluasi pada titik tetap tersebut. Selanjutnya,
kestabilan disekitar titik tetap diperiksa.
Titik tetap (
) disubstitusikan ke dalam persamaan matriks Jacobi
persamaan (13), sehingga dihasilkan matriks Jacobi
(
)
[
]
(20)
Dengan menyelesaikan persamaan karakteristik ( (
)
) diperoleh
nilai eigen untuk matriks (
)
, yaitu:
karena semua parameter bernilai positif dan , maka , , dan
nilai eigen ketiga bergantung pada nilai dan dengan persamaan
Titik tetap bebas penyakit bersifat stabil jika sehingga diperoleh
persamaan

10
(21)
Titik tetap bebas penyakit bersifat sadel atau takstabil jika . Sehingga
diperoleh persamaan
(22)
Dari persamaan (21) dan (22) diperoleh bilangan reproduksi dasar sebagai berikut
(23)
Titik tetap bebas penyakit bersifat stabil jika dan bersifat takstabil jika
. Nilai bilangan reproduksi dasar diberikan oleh Teorema 2.
Teorema 2
1. Jika maka titik tetap bebas penyakit bersifat stabil asimptotik lokal.
2. Jika maka titik tetap bebas penyakit bersifat takstabil.
Titik tetap disubstitusikan ke dalam persamaan matriks Jacobi
persamaan (13), sehingga dihasilkan matriks Jacobi
[
]
(24)
Dengan menyelesaikan persamaan karakteristik ( )
diperoleh nilai eigen untuk matriks , yaitu:
√
dengan
karena semua parameter bernilai positif, maka , dan bergantung pada
nilai . Jika , maka kestabilan titik tetap bersifat simpul stabil atau sadel.
Jika , maka kestabilan bersifat stabil.
Dari syarat batas yang dihasilkan agar titik tetap bernilai
positif dan kondisi nilai , maka diperoleh dua kasus berikut:
1. dan .
2. dan .
Kondisi kestabilan titik tetap (
) dan
yang diperoleh
diberikan oleh Tabel 1.

11
Tabel 1 Kondisi kestabilan titik tetap
No Kasus Kondisi
1 - Stabil -
2 dan - Sadel Spiral Stabil
3 dan √ Sadel Sadel
√ Sadel Simpul Stabil
Bukti pelinearan di titik tetap dapat dilihat pada Lampiran 3.
MASALAH KONTROL OPTIMUM
Pada bagian ini akan dibahas kerangka kontrol optimum yang digunakan
untuk menyelesaikan sistem persamaan diferensial taklinear dari model
penyebaran virus H1N1. Teori kontrol optimum akan digunakan untuk
menganalisis perilaku model penyebaran virus H1N1 setelah diberi kontrol
(vaksin). Masalah kontrol optimum untuk penyebaran virus H1N1 adalah
menentukan fungsi kontrol yang optimum sedemikian sehingga jumlah
individu yang terinfeksi minimum pada akhir waktu.
Pada karya ilmiah ini fungsional objektif untuk masalah penyebaran virus
H1N1 didefinisikan sebagai berikut
∫ [
]
dengan merupakan bobot biaya vaksinasi dan mewakili lamanya
program vaksinasi. Fungsi kontrol dicari yang optimum sedemikian sehingga
{ } (26)
dengan
{ [ ]} (27)
di mana adalah sekumpulan kontrol yang admissible selama vaksinasi.
Masalah kontrol optimum di atas dapat dituliskan sebagai berikut
∫ [
]
dengan kendala
1. SPD taklinear untuk model penyebaran virus H1N1
(28)
(29)
(30)
2. Batas fungsi kontrol (31)
di mana permasalahan di atas akan diselesaikan dengan menerapkan prinsip
minimum Pontryagin. Fungsi Hamilton untuk masalah penyebaran virus H1N1
diberikan oleh persamaan

12
∑
(
) (
)
di mana adalah bagian sebelah kanan dari persamaan diferensial dari variabel
state ke- . Peubah state pada fungsi Hamilton ditentukan melalui syarat (1) Teorema
prinsip minimum Pontryagin, syarat (1) menghasilkan kembali kendala pada
masalah kontrol optimum yang diberikan oleh persamaan berikut:
(32)
(33)
(34)
dengan syarat awal , , dan .
Peubah adjoint , , dan pada fungsi Hamilton nilainya ditentukan
melalui syarat (2) Teorema prinsip minimum Pontryagin. Persamaan diferensial
untuk peubah adjoint adalah sebagai berikut,
(
)
(35)
(
)
(36)
(37)
dengan syarat di waktu akhir dan solusi dari persamaan diferensial
yang diberikan oleh syarat (1) adalah , , , dan .
Durasi untuk program vaksinasi telah ditentukan yaitu pada interval waktu
[ ] dengan dalam hari. Peubah state pada waktu awal diberikan sebagai
nilai awal dari sistem, sedangkan peubah state pada waktu akhir bebas dan tidak
ada fungsi scrap sehingga dihasilkan syarat transversalitas pada persamaan
( ) ( ) ( ) (38)
Fungsi kontrol pada masalah kontrol optimum ditentukan melalui
syarat (3) yang memberikan kondisi sebagai berikut
(39)
sehingga diperoleh persamaan
Fungsi kontrol memiliki nilai batas sehingga terdapat tiga
kemungkinan nilai untuk fungsi kontrol , yaitu:
1. Jika , maka nilai fungsi kontrol .
2. Jika , maka nilai fungsi kontrol
.

13
3. Jika , maka nilai fungsi kontrol .
Fungsi kontrol yang optimal berdasarkan tiga kemungkinan di atas dapat
ditulis sebagai berikut
( (
))
SIMULASI NUMERIK
Pada bagian ini akan dibahas nilai parameter dan simulasi numerik yang
dilakukan untuk mengontrol penyebaran virus H1N1 dengan menggunakan
metode Runge-Kutta orde-4 pada perangkat lunak.
Nilai Parameter
Parameter dari model penyebaran virus H1N1 ada enam yaitu tingkat kontak
individu terinfeksi dengan individu rentan , tingkat perekrutan individu baru ,
tingkat kematian alami , tingkat kematian yang disebabkan virus H1N1 ,
tingkat penyembuhan , dan total populasi .
Tingkat kefektifan kontak dipengaruhi oleh bilangan reproduksi dasar
yang ditentukan dari persamaan
. Nilai bilangan reproduksi dasar yang
digunakan untuk simulasi ada dua yaitu dan . Nilai bilangan
reproduksi dasar berbanding lurus dengan tingkat kontak. Semakin besar bilangan
reproduksi dasar, maka tingkat kontak antara populai terinfeksi dengan populasi
rentan juga akan semakin besar. Nilai kontak berturut-turut adalah dan .
Nilai parameter untuk tingkat perekrutan individu baru bersifat konstan
( ). Tingkat kematian alami individu diasumsikan berbanding terbalik
dengan angka harapan hidup saat lahir. Angka harapan hidup saat lahir pada tahun
2012 di Indonesia adalah 71 tahun, sehingga tingkat kematian alami di Indonesia
adalah (WHO 2013).
Tingkat kematian yang disebabkan oleh virus H1N1 berbeda untuk
masing-masing negara, rata-rata berkisar antara sampai (Vaillant et al.
2009). Pada karya ilmiah ini tingkat kematian disebabkan oleh virus H1N1 adalah
. Tingkat penyembuhan ditentukan dari lamanya masa pengobatan. Pada
karya ilmiah ini lamanya masa pengobatan diambil 4, 5, dan 6 hari, sehingga
tingkat penyembuhan masing-masing sebesar
,
, dan
per individu per hari.
Total populasi diambil berdasarkan jumlah penduduk Kabupaten dan Kota
Bogor tahun 2012 yaitu sebanyak orang (BPS Jabar 2012).
Nilai-nilai parameter tersebut diberikan oleh Tabel 2.

14
Tabel 2 Nilai-nilai parameter
Parameter Definisi Nilai
Tingkat kontak individu terinfeksi dengan individu
rentan
Tingkat perekrutan (lahir dan migrasi)
Tingkat kematian alami
Tingkat kematian yang disebabkan virus H1N1
Tingkat penyembuhan
,
,
ket: Nilai untuk .
Nilai untuk .
Nilai awal untuk sistem persamaan diferensial taklinear diberikan oleh Tabel 3.
Tabel 3 Nilai awal untuk model penyebaran virus H1N1
Nilai awal
(orang)
Hasil Simulasi
Simulasi numerik yang dilakukan ada dua yaitu membandingkan dinamika
masing-masing populasi sebelum dan setelah pemberian kontrol ke dalam sistem
dengan nilai bilangan reproduksi dasar yang berbeda dan membandingkan efek
penyembuhan yang berbeda (bergantung pada lamanya periode pengobatan)
terhadap dinamika populasi dari individu yang terinfeksi. Parameter dan nilai awal
yang akan digunakan untuk simulasi numerik diberikan pada Tabel 2 dan Tabel 3.
Simulasi numerik pertama akan membandingkan perubahan masing-masing
populasi sebelum dan setelah pemberian kontrol dengan bilangan reproduksi dasar
yang berbeda. Gambar-gambar dibawah ini membandingkan perubahan yang
terjadi pada populasi terinfeksi, populasi rentan, populasi yang disembuhkan
sebelum dan setelah pemberian kontrol ke dalam sistem dan menampilkan fungsi
kontrol yang diperoleh.
15
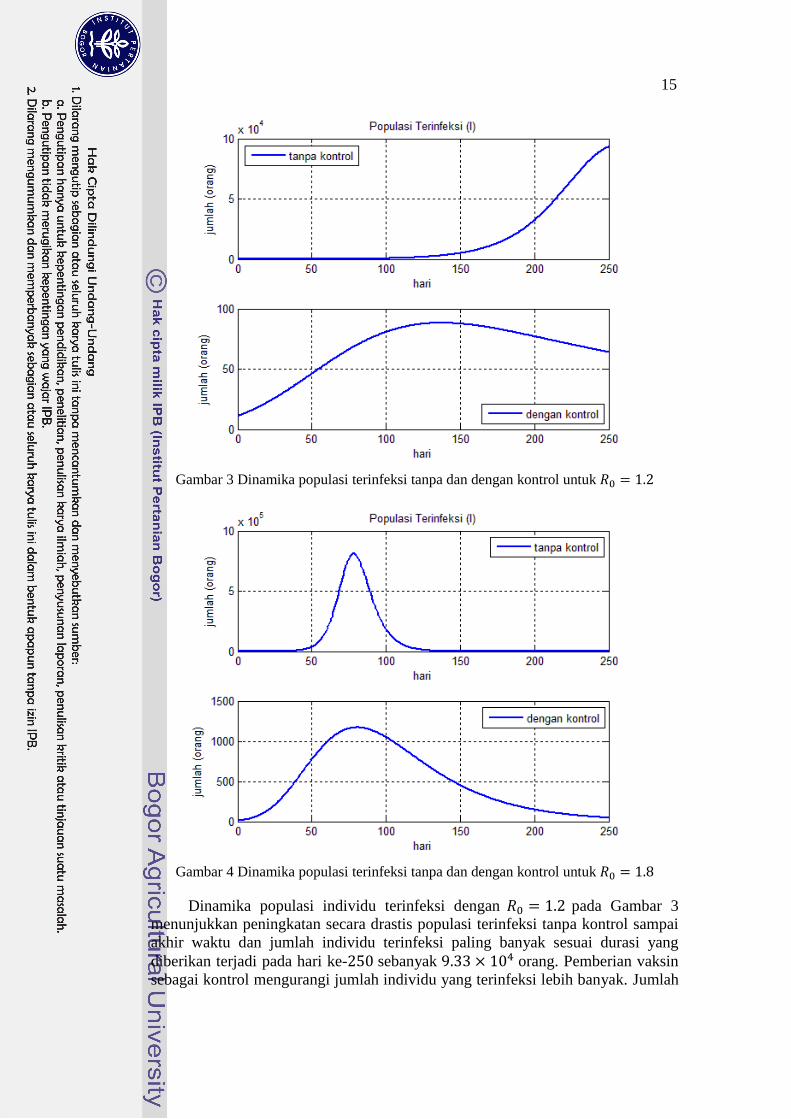
Gambar 3 Dinamika populasi terinfeksi tanpa dan dengan kontrol untuk
Gambar 4 Dinamika populasi terinfeksi tanpa dan dengan kontrol untuk
Dinamika populasi individu terinfeksi dengan pada Gambar 3
menunjukkan peningkatan secara drastis populasi terinfeksi tanpa kontrol sampai
akhir waktu dan jumlah individu terinfeksi paling banyak sesuai durasi yang
diberikan terjadi pada hari ke- sebanyak orang. Pemberian vaksin
sebagai kontrol mengurangi jumlah individu yang terinfeksi lebih banyak. Jumlah
16
individu terinfeksi setelah pemberian kontrol paling banyak terjadi pada hari ke-
sebanyak orang. Tingkat keefektifan pemberian vaksin untuk mengontrol
penyebaran virus H1N1 dihitung dengan membandingkan penurunan jumlah
individu terinfeksi setelah pemberian kontrol dengan jumlah individu terinfeksi
tanpa kontrol saat penyakit mewabah. Tingkat keefektifan vaksin untuk bilangan
reproduksi dasar adalah . Pada Gambar 4, dinamika populasi
individu terinfeksi dengan menunjukan peningkatan secara drastis
populasi terinfeksi tanpa kontrol dan mencapai titik puncak penyebaran penyakit
H1N1 pada hari ke-78 sebanyak orang. Titik puncak penyebaran
H1N1 setelah pemberian kontrol terjadi pada hari ke- sebesar orang.
Tingkat keefektian pemberian kontrol ke dalam sistem untuk bilangan reproduksi
dasar adalah . Penurunan signifikan jumlah individu terinfeksi
setelah pemberian kontrol ke dalam sistem menunjukan bahwa fungsi kontrol
yang diperoleh berhasil mengontrol penyebaran H1N1.
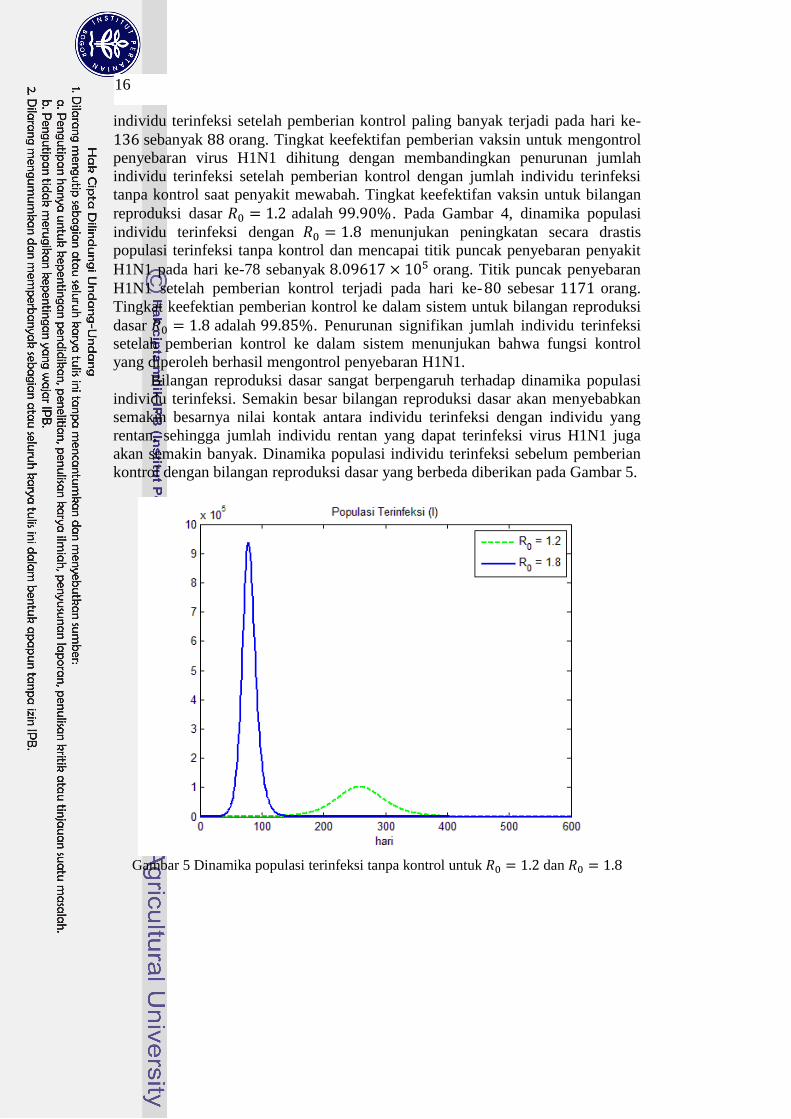
Bilangan reproduksi dasar sangat berpengaruh terhadap dinamika populasi
individu terinfeksi. Semakin besar bilangan reproduksi dasar akan menyebabkan
semakin besarnya nilai kontak antara individu terinfeksi dengan individu yang
rentan, sehingga jumlah individu rentan yang dapat terinfeksi virus H1N1 juga
akan semakin banyak. Dinamika populasi individu terinfeksi sebelum pemberian
kontrol dengan bilangan reproduksi dasar yang berbeda diberikan pada Gambar 5.
Gambar 5 Dinamika populasi terinfeksi tanpa kontrol untuk dan

17
Gambar 6 Dinamika populasi rentan tanpa dan dengan kontrol untuk
Gambar 7 Dinamika populasi rentan tanpa dan dengan kontrol untuk

18
Gambar 8 Dinamika populasi disembuhkan tanpa dan dengan kontrol untuk
Gambar 9 Dinamika populasi disembuhkan tanpa dan dengan kontrol

19
Gambar 10 Kontrol optimum
Laju berkurangnya jumlah individu rentan dengan kontrol pada Gambar 6
lebih besar dibandingkan dengan laju berkurangnya jumlah individu rentan tanpa
pemberian kontrol untuk . Setelah pemberian kontrol, jumlah individu
rentan jauh lebih sedikit dibandingkan dengan tanpa adanya pemberian kontrol.
Penurunan populasi rentan setelah kontrol terjadi karena fungsi kontrol
mentransfer individu rentan menjadi individu disembuhkan. Populasi rentan untuk
pada Gambar 7 menurun drastis sampai hari ke-77 program vaksinasi.
Jumlah individu yang rentan dengan adanya kontrol lebih kecil dibandingkan
dengan jumlah individu yang rentan tanpa kontrol sampai hari ke-77 program
vaksinasi. Setelah itu, jumlah individu yang rentan dengan kontrol lebih besar
dibandingkan dengan jumlah individu yang rentan tanpa kontrol.
Populasi rentan tanpa kontrol untuk berkurang lebih banyak
dibandingkan dengan populasi rentan tanpa kontrol untuk . Hal ini
disebabkan oleh tingkat kontak yang semakin besar untuk bilangan reproduksi
dasar yang besar, sehingga jumlah individu rentan yang ditransfer ke dalam
populasi terinfeksi juga semakin banyak.
Populasi yang disembuhkan pada Gambar 8 dengan menunjukkan
terjadinya peningkatan jumlah individu yang disembuhkan setelah pemberian
kontrol sampai akhir program vaksinasi. Laju bertambahnya jumlah individu yang
disembuhkan dengan kontrol lebih besar dibandingkan dengan laju bertambahnya
jumlah individu yang disembuhkan tanpa kontrol. Jumlah individu yang
disembuhkan untuk setelah pemberian kontrol pada Gambar 9 lebih
banyak dibandingkan dengan jumlah individu yang disembuhkan tanpa kontrol
sampai hari ke-83 program vaksinasi. Setelah itu, jumlah individu yang
disembuhkan dengan kontrol lebih sedikit dibandingkan dengan jumlah individu
yang disembuhkan tanpa kontrol. Hal ini disebabkan oleh nilai fungsi kontrol
yang semakin mengecil seiring dengan berkurangnya jumlah individu terinfeksi

20
menuju akhir program vaksinasi. Nilai fungsi kontrol yang semakin mengecil
mengakibatkan semakin sedikit jumlah individu rentan yang ditransfer ke
populasi yang disembuhkan.
Gambar 10 menunjukkan perbandingan nilai fungsi kontrol dengan
bilangan reproduksi dasar yang berbeda. Semakin besar bilangan reproduksi dasar
yang digunakan akan menghasilkan fungsi kontrol yang lebih besar juga. Hal ini
terjadi karena tingkat mewabah suatu penyakit bergantung kepada bilangan
reproduksi dasar. Bilangan reproduksi dasar yang lebih besar menyebabkan
penyakit akan mewabah lebih cepat dan lebih banyak individu yang tertular
penyakit. Namun, kedua fungsi kontrol yang diperoleh berhasil meminimumkan
populasi yang terinfeksi virus H1N1 pada akhir program vaksinasi. Kontrol
optimum mempunyai nilai maksimum pada awal program vaksinasi yaitu
sebesar untuk dan untuk . Nilai fungsi
kontrol turun sampai akhir program vaksinasi seiring dengan semakin
berkurangnya jumlah individu yang terinfeksi. Pada waktu yang sama populasi
yang rentan juga turun disebabkan oleh nilai fungsi kontrol. Nilai fungsional
objektif yang dihasilkan berdasarkan nilai fungsi kontrol yang diperoleh adalah
untuk dan untuk .
Simulasi numerik yang kedua adalah membandingkan tingkat penyembuhan
yang berbeda terhadap dinamika populasi individu terinfeksi. Tingkat
penyembuhan individu terinfeksi bergantung pada lamanya periode pengobatan.
Pada simulasi ini menggunakan tiga periode pengobatan yang berbeda yaitu 4, 5,
dan 6 hari, sehingga tingkat penyembuhan masing-masing berdasarkan lamanya
periode pengobatan secara berturut-turut adalah
,
, dan
per hari. Dinamika populasi individu terinfeksi dengan tingkat
penyembuhan yang berbeda diberikan oleh Gambar 11.
Gambar 11 Dinamika populasi individu terinfeksi dengan kontrol untuk
, , dan

21
Dinamika populasi individu yang terinfeksi dengan menggunakan tingkat
penyembuhan mencapai titik puncaknya pada hari ke- , dengan
menggunakan tingkat penyembuhan populasi individu terinfeksi mencapai
titik puncaknya pada hari ke- , dan dengan menggunakan tingkat penyembuhan
populasi individu terinfeksi mencapai titik puncaknya pada hari ke- .
Dinamika populasi individu terinfeksi akan turun secara drastis setelah mencapai
titik puncaknya. Gambar 11 menunjukan bahwa tingkat penyembuhan yang lebih
besar dapat mengurangi jumlah individu yang terinfeksi dengan lebih banyak di
waktu akhir. Program Matlab untuk simulasi numerik dapat dilihat pada Lampiran
4.
SIMPULAN
Model yang digunakan untuk menggambarkan masalah penyebaran virus
H1N1 adalah model Susceptible Infected Recovered (SIR). Populasi dalam model
SIR dibagi menjadi tiga kelas epidemiologi yaitu kelas yang rentan , kelas yang
terinfeksi , dan kelas yang disembuhkan .
Simulasi numerik yang dilakukan ada dua yaitu simulasi numerik untuk
membandingkan dinamika masing-masing populasi dengan bilangan reproduksi
dasar yang berbeda sebelum dan setelah pemberian kontrol dan simulasi numerik
untuk melihat dinamika populasi individu terinfeksi terhadap tingkat
penyembuhan yang berbeda. Populasi terinfeksi berkurang secara drastis setelah
adanya pemberian kontrol ke dalam sistem. Jumlah individu yang terinfeksi
dengan adanya program vaksinasi jauh lebih kecil dibandingkan dengan tanpa
adanya program vaksinasi. Semakin besar nilai bilangan reproduksi dasar maka
tingkat kontak antara individu terinfeksi dengan individu rentan semakin besar,
sehingga individu rentan akan semakin banyak yang terinfeksi virus H1N1 dan
penyakit mewabah lebih cepat. Periode pengobatan yang lebih singkat
menghasilkan tingkat penyembuhan yang besar dan mengurangi jumlah individu
yang terinfeksi virus H1N1 dengan lebih banyak pada waktu akhir.
DAFTAR PUSTAKA
Anton H, Rorres C. 2004. Aljabar Linear Elementer. Ed ke-8. Indriasari R,
Harmein I, Penerjemah. Jakarta (ID): Erlangga.
[BPS JABAR] Badan Pusat Statistik Jawa Barat. 2012. Jumlah Penduduk
Kabupaten/Kota di Jawa Barat 2004 – 2012. [Internet]. [diacu 2014 Februari].
Tersedia dari: http://jabar.bps.go.id/subyek/jumlah-penduduk-kabupatenkota-
di-jawa-barat-2004-2012.
Canale R P, Chapra S C. 2010. Numerical Methods for Engineers 6th Edition.
New York(US): McGraw-Hill.
El Hia M, Balatif O, Bouyaghroumni J, Labriji E, Rachik M. 2012. Optimal
Control Applied to the Spread of Influenza A(H1N1). Applied Mathematical
Sciences. 6(82): 4057 – 4065.

22
Giesecke J. 1994. Modern Infectious Diseases Epidemiology. New York (US):
Oxford University Press.
Hattaf K, Yousfi N. 2009. Mathematical Model of the Influenza A(H1N1)
Infection. Advanced Studies in Biology. 1(8): 383 – 390.
[Kompas]. 2009. Sebagian Besar Kasus A-H1N1 di Indonesia Bukan Impor.
[Internet]. [diacu 2014 Juni]. Tersedia dari: http://lipsus.kompas.com
/jalanjalan/read/2009/08/01/20121219/Sebagian.Besar.Kasus.A.H1N1.di.Indo
nesia.Bukan.Impor.
Sitepoe M. 2009. Melawan Influenza A(H1N1). Jakarta (ID): Grasindo.
Tu PNV. 1993. Introductory Optimization Dynamics: Optimal Control with
Economics and Management Applications. Second Revised and Enlarged
Edition. Heidelberg (DE): Springer – Verlag.
Tu PNV. 1994. Dynamical System: An Introduction with Application in
Economics and Biology. Second Revised and Enlarged Edition. Heidelberg
(DE): Springer – Verlag.
Vaillant L, Ruche G La, Tarantola A, Barboza P. 2009. Epidemiology of Fatal
Cases Associated with Pandemic H1N1 Influenza. Eurosurveillance. 14(33):
pii = 19309.
[WHO] World Health Organization. 2009. Pandemic (H1N1) 2009. [Internet].
[diacu 2014 Februari]. Tersedia dari: http://www.who.int/csr/don/
2009_11_27a/en/.
[WHO] World Health Organization. 2013. Life Expectancy: Life Expectancy
Data by Country. [Internet]. [diacu 2014 Februari]. Tersedia dari:
http://apps.who.int/gho/data/node.main.687?lang=en.

23
LAMPIRAN
Lampiran 1 Bukti Teorema 1 (Prinsip Minimum Pontryagin)
Fungsional objektif yang akan diminimumkan sebagai berikut
∫ [ ]
[ ]
(40)
terhadap kendala
[ ] (41)
diberikan , waktu awal , sedangkan dan keduanya tidak
ditentukan. Fungsi “Scrap” dapat didefinisikan sebagai berikut.
∫
(42)
sehingga persamaan (36) menjadi
∫ [
]
∫ [
]
(43)
dengan , , , dan secara sederhana dapat dituliskan
sebagai dan . Meminimum pada persamaan (43) tidak dipengaruhi
oleh pada saat , tetapi ditentukan oleh bentuk integral pada suku kedua
dari persamaan (43).
Didefinisikan fungsional objektif yang diperbesar sebagai berikut
∫
(44)
dengan
(45)
Bentuk disebut sebagai Hamiltonian.
Syarat perlu agar fungsional (43) memiliki nilai ekstrim adalah .
Berdasarkan kalkulus variasi maka diperoleh sebagai berikut.
∫ [[
] ]
[ ]
(46)

24
Agar persamaan (46) dipenuhi, maka persamaan Euler harus dipenuhi
(47)
sehingga diperoleh persamaan berikut
(48)
dan berakibat
(49)
Variasi dan memberikan sifat saling bebas sehingga koefisiennya
bernilai nol, yaitu dan . Persamaan (45) memberikan dan
, sehingga
(50)
(51)
Syarat batas diberikan oleh suku terakhir persamaan (46) yaitu
[ ] (52)
karena
(53)
maka persamaan (52) menjadi
(54)
yang disebut sebagai syarat batas (transversality condition). Jika dan
tidak ditentukan, maka syarat batas menjadi
(55)
yang menghasilkan teorema Pontryagin.
(Tu 1994)
Lampiran 2 Penentuan Titik Tetap
Penentuan titik tetap
Titik tetap sistem persamaan diferensial taklinear tanpa kontrol (10)
diperoleh dari
,
, dan
, sehingga sistem persamaan (10)
menjadi persamaan (12), (13), dan (14) berikut:

25
Dari persamaan (12) diperoleh:
(
)
(56)
Atau
(57)
Dari persamaan (13) diperoleh:
(
)
(58)
Atau
(59)
Dari persamaan (14) diperoleh:
(60)
Titik tetap pertama diperoleh dengan mengasumsikan sistem dalam keadaan
bebas penyakit ( ), maka dari persamaan (57) dan (60) diperoleh:
Sehingga diperoleh titik tetap bebas penyakit (
).
Titik tetap kedua diperoleh dengan menyelesaikan persamaan (57), (59), dan
(60) secara bersamaan. Dari persamaan (59) diperoleh:
(61)
dengan menyubstitusikan persamaan (61) ke persamaan (57) diperoleh:
(62)
Persamaan (62) disubstitusikan ke persamaan (60), diperoleh persamaan berikut:
( )
(63)
Sehingga diperoleh titik tetap kedua . Agar titik tetap
positif, maka
26
Karena semua parameter bernilai positif, maka . akan bernilai positif
jika , sehingga . akan bernilai
positif jika , sehingga .
Lampiran 3 Analisis Kestabilan Titik Tetap dan Nilai Bilangan Reproduksi Dasar
Dengan melakukan pelinearan terhadap model H1N1 diperoleh matriks
Jacobi sebagai berikut:
[
]
(64)
Pelinearan di titik tetap (
)
Substitusikan titik tetap ke dalam matrik Jacobi dengan cara pendekatan
limit
(
)
[
]
(65)
(
)
[
]
kemudian dicari nilai eigennya dengan menggunakan persamaan karakteristik
( (
)
) , sehingga diperoleh:
| ( )
|
|
|
|
|

27
karena semua parameter bernilai positif dan tingkat perekrutan individu baru
konstan ( ), maka , , dan nilai eigen ketiga bergantung pada
nilai dan dengan persamaan
Titik tetap bebas penyakit bersifat stabil jika . Sehingga diperoleh
persamaan
sehingga
Titik tetap bebas penyakit bersifat takstabil jika . Sehingga diperoleh
persamaan
sehingga
Dari persamaan (21) dan (22) diperoleh bilangan reproduksi dasar
. Titik tetap bebas penyakit bersifat stabil jika dan bersifat
takstabil jika .
Pelinearan di titik tetap
Substitusikan titik tetap ke dalam matrik Jacobi persamaan (64) dengan
cara pendekatan limit
[
]
[
]
kemudian dicari nilai eigennya dengan menggunakan persamaan karakteristik
( ) , sehingga diperoleh:
| |
|
|
|
|

28
persamaan karakteristiknya diperoleh sebagai berikut:
( ( ))
√
dengan
karena semua parameter bernilai positif, maka , dan bergantung pada
nilai . Jika , maka kestabilan titik tetap bersifat simpul. Jika ,
maka kestabilan bersifat spiral.
Dari syarat batas yang dihasilkan agar titik tetap bernilai
positif dan kondisi nilai , maka diperoleh dua kasus berikut:
1. Jika dan , maka titik tetap bersifat stabil dan bersifat
sadel.
2. Jika , dan √ , maka maka titik tetap bersifat
sadel dan bersifat sadel.
3. Jika , dan √ , maka maka titik tetap bersifat
stabil dan bersifat sadel.
Lampiran 4 M-file Matlab metode Runge-Kutta orde-4
1. M-file Matlab untuk solusi model H1N1 tanpa kontrol
function [S,I,R] =
h1n1_nocontrol(beta,Lambda,mu,d,r,S0,I0,R0,t0,tf,n)
h = (tf-t0)/n; hasil=[]; S(1) = S0; I(1) = I0; R(1) = R0; N = S0+I0+R0;
for i = 1:n n11 = Lambda - mu*S(i) - beta*S(i)*I(i)/N; n12 = Lambda - mu*(S(i)+h*n11/2) -
beta*(S(i)+h*n11/2)*(I(i)+h*n11/2)/N; n13 = Lambda - mu*(S(i)+h*n12/2) -
beta*(S(i)+h*n12/2)*(I(i)+h*n11/2)/N; n14 = Lambda - mu*(S(i)+h*n13) -
beta*(S(i)+h*n13)*(I(i)+h*n13)/N; n1 = (n11+2*n12+2*n13+n14)/6;

29
n21 = beta*S(i)*I(i)/N - (mu+d+r)*I(i); n22 = beta*(S(i)+h*n21/2)*(I(i)+h*n21/2)/N -
(mu+d+r)*(I(i)+h*n21/2); n23 = beta*(S(i)+h*n22/2)*(I(i)+h*n22/2)/N -
(mu+d+r)*(I(i)+h*n22/2); n24 = beta*(S(i)+h*n23)*(I(i)+h*n23)/N -
(mu+d+r)*(I(i)+h*n23); n2 = (n21+2*n22+2*n23+n24)/6;
n31 = r*I(i) - mu*R(i); n32 = r*(I(i)+h*n31/2) - mu*(R(i)+h*n31/2); n33 = r*(I(i)+h*n32/2) - mu*(R(i)+h*n32/2); n34 = r*(I(i)+h*n33) - mu*(R(i)+h*n33); n3 = (n31+2*n32+2*n33+n34)/6;
S(i+1) = S(i) + h*n1; I(i+1) = I(i) + h*n2; R(i+1) = R(i) + h*n3; end for i=1:n+1 hasil=[hasil;i I(i)]; end hasil
2. M-file Matlab untuk solusi model H1N1 dengan kontrol
function [S,I,R,u,lambda1,lambda2,lambda3,J] =
h1n1_withcontrol(beta,Lambda,mu,d,r,A,S0,I0,R0,t0,tf,n)
tol = 0.01; err = tol + 1; hasilc=[];
h = (tf-t0)/n; N = S0+I0+R0;
S = zeros(1,n+1); I = zeros(1,n+1); R = zeros(1,n+1); lambda1 = zeros(1,n+1); lambda2 = zeros(1,n+1); lambda3 = zeros(1,n+1);
S(1) = S0; I(1) = I0; R(1) = R0;
u = zeros(1,n+1)+0.5;
while(err > tol)
oldu = u;

30
for i = 1:n n11 = Lambda - mu*S(i) - beta*S(i)*I(i)/N - u(i)*S(i); n12 = Lambda - mu*(S(i)+h*n11/2) -
beta*(S(i)+h*n11/2)*(I(i)+h*n11/2)/N - u(i)*(S(i)+h*n11/2); n13 = Lambda - mu*(S(i)+h*n12/2) -
beta*(S(i)+h*n12/2)*(I(i)+h*n11/2)/N - u(i)*(S(i)+h*n12/2); n14 = Lambda - mu*(S(i)+h*n13) -
beta*(S(i)+h*n13)*(I(i)+h*n13)/N - u(i)*(S(i)+h*n13); n1 = (n11+2*n12+2*n13+n14)/6;
n21 = beta*S(i)*I(i)/N - (mu+d+r)*I(i); n22 = beta*(S(i)+h*n21/2)*(I(i)+h*n21/2)/N -
(mu+d+r)*(I(i)+h*n21/2); n23 = beta*(S(i)+h*n22/2)*(I(i)+h*n22/2)/N -
(mu+d+r)*(I(i)+h*n22/2); n24 = beta*(S(i)+h*n23)*(I(i)+h*n23)/N -
(mu+d+r)*(I(i)+h*n23); n2 = (n21+2*n22+2*n23+n24)/6;
n31 = r*I(i) - mu*R(i) + u(i)*S(i); n32 = r*(I(i)+h*n31/2) - mu*(R(i)+h*n31/2) +
u(i)*(S(i)+h*n31/2); n33 = r*(I(i)+h*n32/2) - mu*(R(i)+h*n32/2) +
u(i)*(S(i)+h*n32/2); n34 = r*(I(i)+h*n33) - mu*(R(i)+h*n33) +
u(i)*(S(i)+h*n33); n3 = (n31+2*n32+2*n33+n34)/6;
S(i+1) = S(i) + h*n1; I(i+1) = I(i) + h*n2; R(i+1) = R(i) + h*n3; end
for i = 1:n j = (n+1)-i; n11 = mu*lambda1(j+1) + (lambda1(j+1)-lambda3(j+1))*u(j+1)
+ (lambda1(j+1)-lambda2(j+1))*beta*I(j+1)/N; n12 = mu*(lambda1(j+1)+h*n11/2) + ((lambda1(j+1)+h*n11/2)-
(lambda3(j+1)+h*n11/2))*u(j+1) + ((lambda1(j+1)+h*n11/2)-
(lambda2(j+1)+h*n11/2))*beta*I(j+1)/N; n13 = mu*(lambda1(j+1)+h*n12/2) + ((lambda1(j+1)+h*n12/2)-
(lambda3(j+1)+h*n12/2))*u(j+1) + ((lambda1(j+1)+h*n12/2)-
(lambda2(j+1)+h*n12/2))*beta*I(j+1)/N; n14 = mu*(lambda1(j+1)+h*n13) + ((lambda1(j+1)+h*n13)-
(lambda3(j+1)+h*n13))*u(j+1) + ((lambda1(j+1)+h*n13)-
(lambda2(j+1)+h*n13))*beta*I(j+1)/N; n1 = (n11+2*n12+2*n13+n14)/6;
n21 = -1 + (lambda1(j+1)-lambda2(j+1))*beta*S(j+1)/N +
(mu+r+d)*lambda2(j+1) - r*lambda3(j+1); n22 = -1 + ((lambda1(j+1)+h*n21/2)-
(lambda2(j+1)+h*n21/2))*beta*S(j+1)/N +
(mu+r+d)*(lambda2(j+1)+h*n21/2) - r*(lambda3(j+1)+h*n21/2); n23 = -1 + ((lambda1(j+1)+h*n22/2)-
(lambda2(j+1)+h*n22/2))*beta*S(j+1)/N +
(mu+r+d)*(lambda2(j+1)+h*n22/2) - r*(lambda3(j+1)+h*n22/2);

31
n24 = -1 + ((lambda1(j+1)+h*n23)-
(lambda2(j+1)+h*n23))*beta*S(j+1)/N +
(mu+r+d)*(lambda2(j+1)+h*n23) - r*(lambda3(j+1)+h*n23); n2 = (n21+2*n22+2*n23+n24)/6;
n31 = mu*lambda3(j+1); n32 = mu*(lambda3(j+1)+h*n31/2); n33 = mu*(lambda3(j+1)+h*n32/2); n34 = mu*(lambda3(j+1)+h*n33); n3 = (n31+2*n32+2*n33+n34)/6;
lambda1(j) = lambda1(j+1) - h*n1; lambda2(j) = lambda2(j+1) - h*n2; lambda3(j) = lambda3(j+1) - h*n3; end
temp = (lambda1-lambda3).*S/A; u1 = min(0.9,max(0,temp)); u = 0.5*(u1+oldu);
err = sum(abs(oldu-u)); end for i=1:n+1 hasilc=[hasilc;i I(i)]; end hasilc f = I + A/2*u.^2; J = sum(f*h);
3. M-file untuk plot grafik populasi dengan dan tanpa kontrol
clear all close all
r0 = 1.8; A = 2*10^8; mu = 1/(69*365); d = 0.005; r = 1/5; %r = 1/6; r = 1/4;
S0 = 5.977366*10^6; I0 = 11; R0 = 10; t0 = 0; tf = 250; n = 1000; Lambda = mu*(S0+I0+R0); beta = r0*(mu+d+r);
[Sc,Ic,Rc,u,lambda1,lambda2,lambda3,J] =
h1n1_withcontrol(beta,Lambda,mu,d,r,A,S0,I0,R0,t0,tf,n); [S,I,R] = h1n1_nocontrol(beta,Lambda,mu,d,r,S0,I0,R0,t0,tf,n);
t = linspace(0,tf,n+1);
figure(1) plot(t,S,t,Sc,'--','LineWidth',2); title('Populasi Rentan (S)');
legend('tanpa kontrol','dengan kontrol'); grid; xlabel('hari'); ylabel('jumlah (orang)'); hold on
32
figure(2) subplot(211); plot(t,I,'LineWidth',2); title('Populasi Terinfeksi
(I)'); legend('tanpa kontrol'); grid; xlabel('hari'); ylabel('jumlah (orang)'); subplot(212); plot(t,Ic,'LineWidth',2); legend('dengan kontrol'); grid; xlabel('hari'); ylabel('jumlah (orang)'); hold on figure(3) plot(t,R,t,Rc,'--','LineWidth',2); title('Populasi Sembuh (R)');
legend('tanpa kontrol','dengan kontrol',4); grid; xlabel('hari'); ylabel('jumlah (orang)'); hold on figure(4) plot(t,u,'LineWidth',2); title('Kontrol Optimum (u)'); grid;
xlabel('hari'); hold on figure(5) plot(t,Ic,'b','LineWidth',2); title('Populasi Terinfeksi (I)');
grid; xlabel('hari'); hold on figure(6) plot(t,S,'b',t,I,'r',t,R,'g','LineWidth',2); title('Dinamika
Populasi H1N1'); grid; xlabel('hari');legend('Populasi
Rentan','Populasi Terinfeksi','Populasi Disembuhkan'); hold on
figure(7) subplot(311); plot(t,lambda1,'LineWidth',2); grid; title('Fungsi
Adjoin (\lambda)'); legend('\lambda_1'); subplot(312); plot(t,lambda2,'LineWidth',2); grid;
legend('\lambda_2'); subplot(313); plot(t,lambda3,'LineWidth',2); grid; xlabel('hari');
legend('\lambda_3'); hold on

33
RIWAYAT HIDUP
Penulis dilahirkan di Solok pada tanggal 5 Agustus 1991 sebagai anak
pertama dari tiga bersaudara, dengan ayah bernama Nasrul, S.Pd dan ibu bernama
Fasmi Halima.
Pada tahun 2009, penulis lulus dari SMA Negeri 1 Kubung dan pada tahun
yang sama diterima di Departemen Matematika, Fakultas Matematika dan Ilmu
Pengetahuan Alam, Institut Pertanian Bogor melalui jalur Undangan Seleksi
Masuk IPB (USMI).
Selama mengikuti perkuliahan di IPB, penulis pernah menjadi pengurus
GUMATIKA divisi PSDM pada tahun 2011. Penulis juga aktif dalam futsal
Matematika, pengurus IPMM divisi Olahraga, dan ketua OMDA Ikatan Keluarga
Mahasiswa Solok (IKMS) periode 2011/2012. Penulis juga aktif dalam beberapa
kepanitian di kampus dan di organisasi.
Penulis pernah menjadi asisten dosen mata kuliah Pengantar Metode
Komputasi pada tahun ajaran 2011/2012 dan mata kuliah Analisis Numerik pada
tahun ajaran 2012/2013. Pada tahun 2013 penulis melaksanakan praktek kerja
lapang di Bank Indonesia Departemen Pengembangan Akses Keuangan dan
UMKM.