scada sebuah smarthome untuk pengendali ...8. para sahabat “gaple gaple sekaban” yang selalu...
TRANSCRIPT

TUGAS AKHIR
SCADA SEBUAH SMARTHOME UNTUK
PENGENDALI LAMPU, PENGENDALI PINTU
PAGAR RUMAH, DAN PENGENDALI GORDEN
BERBASIS PLC SCHNEIDER M221
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun Oleh :
KEVIN SANJAYA
NIM : 155114046
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2019
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ii
FINAL PROJECT
SCADA AS A SMARTHOME FOR LIGHT
CONTROL, HOME FENCE DOOR CONTROL, AND
CURTAIN CONTROL BASED ON SCHNEIDER PLC
M221
In a partial fulfillment of the requirements
for the degree of Sarjana Teknik
Department of Electrical Engineering
Faculty of Science and Technology, Sanata Dharma University
Arranged by:
KEVIN SANJAYA
NIM : 155114046
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2019
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

v
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
“JIKA DIAMMU BIJAK, MAKA DIAMLAH. NAMUN
JIKA DIAMMU DIINJAK, MAKA BICARALAH,
AGAR MEREKA DIAM.”
Skripsi ini saya persembahkan untuk
TUHAN YANG MAHA ESA
Keluarga Tercinta
Bangsa INDONESIA
Dan sahabat-sahabat saya
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
vii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

viii
INTISARI Smarthome dibuat untuk membantu meringankan pekerjaan manusia di bidang
otomasi dilingkungan rumah tinggal. Tujuan dari sistem ini untuk mengendalikan lampu,
gorden, dan pintu pagar, yang dilengkapi dengan HMI (Human Machine Interface) untuk
menampilkan proses secara real time.
Sistem dari smarthome ini dibuat menggunakan PLC Schneider TM221CE24R
sebagai kontroler. Smarthome ini mengendalikan lampu dengan lima kondisi kecerahan
lampu yang berbeda-beda dengan menggunakan sensor UV (Ultraviolet), mengendalikan
pintu pagar buka dan tutup dengan menggunakan sensor PIR (Passive Infrared), dan
mengendalikan gorden dengan tiga kondisi berbeda-beda (Buka penuh, Tutup setengah ,
Tutup penuh) dengan sensor LDR. Pengendalian objek-objek smarthome ini ditampilkan
pada sebuah HMI (Human Machine Interface). Operator dapat memantau objek-objek
yang sedang bekerja melalui tampilan HMI secara realtime.
Melalui tahapan-tahapan pengujian dan percobaan alat, didapatkan kesimpulan
bahwa perangkat keras smarthome ini dapat melakukan pengendalian objek-objek dengan
baik sesuai dengan fungsinya masing-masing. Perangkat lunak berupa tampilan HMI untuk
setiap objek, tombol start sistem, dan tombol stop sistem dapat berjalan dengan baik sesuai
dengan perancangan.
Kata kunci : Smarthome, PLC, HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ix
ABSTRACT Smarthome was made to help relieve human work in the field of automation in the
home of residence. The purpose of this system is to control the lamp, curtain, and fence
door, which are equipped with the HMI (Human Machine Interface) to display the process
in real time.
The system of this smarthome is made using Schneider TM221CE24R PLC as a
controller. This smarthome controls the lamp with five different conditions of lamp
brightness by using a UV (Ultraviolet) sensor, controlling the open and close fence doors
using a PIR (Passive Infrared) sensor, and controlling the curtains with three different
conditions (open full, close half, full lid) with LDR sensor. The control of these
Smarthome objects is displayed in an HMI (Human Machine Interface). The Operator can
monitor the objects that are currently working through the HMI view in realtime.
Through the testing and test stages of the tool, there is a conclusion that this
Smarthome hardware can control objects well according to their respective functions. The
software in the form of HMI display for each object, System Start button, and System stop
button can run well according to the design.
Keyword : Smarthome, PLC, HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
KATA PENGANTAR
Puji Syukur kepada Tuhan Yang Maha Esa atas karunia-Nya sehingga penulis
dapat menyelesaikan tugas akhir yang berjudul “SCADA SEBUAH SMARTHOME
UNTUK PENGENDALI LAMPU, PENGENDALI PINTU PAGAR RUMAH, DAN
PENGENDALI GORDEN BERBASIS PLC SCHNEIDER M221” yang berjalan dengan
baik dan lancar.
Adapun tujuan dari tugas akhir ini disusun untuk memenuhi salah satu syarat untuk
memperoleh gelar sarjana (S.T) bagi mahasiswa program S-1 jurusan Teknik Elektro di
Universitas Sanata Dharma Yogyakarta. Dalam Pengerjaan tugas akhir ini penulis banyak
mendapat dukungan dari gagasan dan materi dari berbagai pihak. Oleh karena itu penulis
ingin menyampaikan terima kasih kepada :
1. Tuhan Yang Maha Esa yang selalu setia mendampingi dan memberikan berkat, serta
pernyetaan kepada penulis. Hallelujah.
2. Bapak Petrus Setyo Prabowo, S.T., M.T., selaku Ketua Program Studi Teknik Elektro
Universitas Sanata Dharma.
3. Ibu Ir. Theresia Prima Ari Setiyani,M.T., selaku dosen pembimbing yang dengan penuh
kesabaran meluangkan waktu membimbing penulis dalam mengerjakan tugas akhir ini.
4. Bapak Djoko Untoro Suwarno S.Si., M.T., selaku dosen penguji yang selalu
memberikan saran dan kritik selama pengerjaan tugas akhir ini.
5. Bapak Martanto S.T., M.T., selaku dosen penguji yang selalu memberikan saran dan
kritik selama pengerjaan tugas akhir ini.
6. Seluruh dosen dan laboran Teknik Elektro yang dengan sabar memberi pengetahuan
yang lebih.
7. Anggota keluarga tercinta dan tersayang. Bapak, Ibu, Nenek, Adik, Kakak, dan sepupu
yang senantiasa mendampingi dalam segala keadaan serta memberikan dukungan baik
secara moril maupun materi.
8. Para sahabat “Gaple Gaple Sekaban” yang selalu membantu dan menghibur.
9. Para sahabat “END TA” yang selalu membantu dan memberikan gagasan-gagasan.
10. Para sahabat “FOESEAL” yang selalu menghibur.
11. Keluarga besar “UKF Futsal FST USD” yang senantiasa menghimbur.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xii
DAFTAR ISI
HALAMAN SAMPUL (BAHASA INDONESIA)…………………………….…………...i
HALAMAN SAMPUL (BAHASA INGGRIS)………………………………….…………ii
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ..................................................... vi
INTISARI ........................................................................................................................... viii
ABSTRACT ......................................................................................................................... ix
KATA PENGANTAR ........................................................................................................... x
DAFTAR ISI ....................................................................................................................... xii
DAFTAR GAMBAR ........................................................................................................... xv
DAFTAR TABEL ............................................................................................................. xvii
BAB I PENDAHULUAN ..................................................................................................... 1
1.1. Latar Belakang ............................................................................................................ 1
1.2. Tujuan dan Manfaat .................................................................................................... 2
1.3. Batasan Masalah ......................................................................................................... 2
1.4. Metologi Penelitian ..................................................................................................... 3
BAB II DASAR TEORI ........................................................................................................ 6
2.1. Smarthome ................................................................................................................. 6
2.2. Programmabel Logic Controller ................................................................................. 6
2.2.1. Bagian-bagian PLC M221 ................................................................................... 7
2.2.2. Memori PLC M221 .............................................................................................. 8
2.2.3. Diagram ladder .................................................................................................... 8
2.3. Sensor ......................................................................................................................... 9
2.3.1. Sensor Ultraviolet .............................................................................................. 10
2.3.1.1. Prinsip Kerja Sensor Ultaviolet ....................................................................... 10
2.3.2. Sensor LDR ........................................................................................................ 11
2.3.2.1. Prinsip Kerja Sensor LDR ............................................................................... 12
2.3.3. Sensor Pergerakan PIR HC-SR501 .................................................................... 13
2.3.3.1. Prinsip Kerja Sensor Pergerakan ..................................................................... 14
2.3.4 Limit switch ......................................................................................................... 15
2.3.4.1 Prinsip Kerja Limit switch ................................................................................ 15
2.3.5. Motor DC .......................................................................................................... 16
2.3.5.1. Prinsip kerja motor DC .................................................................................. 17
2.3.6. Relay .................................................................................................................. 18
2.3.6.1. Prinsip kerja relay............................................................................................ 18
2.4. SCADA .................................................................................................................... 19
2.4.1. Arsitektur Sistem SCADA ................................................................................. 19
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiii
2.5. Wonderware In Touch ............................................................................................. 20
2.5.1. Wonderware InTouch Script dan Animasi ......................................................... 21
2.6. Wonderware MODBUS Ethernet I/O Server (MBENET) ........................................ 24
2.7. TM3AM6 .................................................................................................................. 25
2.8. Driver Current ........................................................................................................... 26
2.8.1. Konfirgurasi Darlington ..................................................................................... 26
BAB III PERANCANGAN PENELITIAN ........................................................................ 28
3.1. Blok diagram ............................................................................................................. 29
3.2. Perancangan perangkat keras mekanis...................................................................... 30
3.2.1. Cara kerja dan bagian komponen pengendali pintu pagar ................................. 30
3.2.2. Cara kerja dan bagian komponen pengendali gorden ........................................ 31
3.3. Perancangan perangkat keras elektronis ................................................................... 32
3.3.1. Sensor LDR ........................................................................................................ 32
3.3.2. Sensor Ultraviolet ............................................................................................... 33
3.3.3. Sensor PIR .......................................................................................................... 34
3.3.4. Pengendali arah putaran motor DC .................................................................... 35
3.3.5. Lampu DC .......................................................................................................... 36
3.4. Perancangan PLC ...................................................................................................... 38
3.5. Perancangan Perangkat Lunak .................................................................................. 39
3.6. Perancangan Diagram Alir SCADA ......................................................................... 40
3.6.1. Proses login ........................................................................................................ 41
3.6.2. Proses pengendali lampu .................................................................................... 42
3.6.3. Proses pengendali pintu pagar ............................................................................ 43
3.6.4. Proses pengendali gorden ................................................................................... 44
BAB IV HASIL DAN PEMBAHASAN ............................................................................. 46
4.1. Perubahan Perancangan ............................................................................................ 46
4.1.1. Penambahan Sensor Photodioda ........................................................................ 46
4.1.2. Perubahan Tampilan HMI .................................................................................. 47
4.1.3. Perubahan Rangkaian Switch Pada Sensor PIR ................................................. 48
4.1.4. Perubahan Range Kondisi Sensor Ultraviolet .................................................... 48
4.1.5. Perubahan Posisi Sensor PIR ............................................................................. 49
4.2. Hasil Implementasi Perangkat Keras ........................................................................ 50
4.2.1. Hasil Implementasi Pengendali Pintu Pagar ...................................................... 50
4.2.2. Hasil Implementasi Pengendali Gorden ............................................................. 51
4.2.3. Hasil Implementasi Pengendali Lampu.............................................................. 52
4.2.4. Tombol Start Dan Stop Di Prototipe .................................................................. 53
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiv
4.2.5. Hasil Implementasi Rangkaian PIR (HC-SR501) .............................................. 53
4.2.6. Hasil Implementasi Rangkaian Sensor LDR ...................................................... 55
4.2.7. Hasil Implementasi Rangkaian Sensor UV ........................................................ 55
4.2.8. Perangkat Keras Rangkaian Pembalik Arah Putaran Motor DC........................ 56
4.2.9. Perangkat Keras Rangkaian switch .................................................................... 56
4.3. Hasil Pengamatan Sistem .......................................................................................... 57
4.3.1. Hasil Pengamatan Proses Login ......................................................................... 57
4.3.2. Data Proses Aktif Sistem.................................................................................... 58
4.3.3. Data Proses Pengendali Lampu .......................................................................... 59
4.3.4. Data Proses Pengendali Pintu Pagar................................................................... 62
4.3.5. Data Proses Pengendali Gorden ......................................................................... 64
4.4. Implementasi Perangkat Lunak ................................................................................ 66
4.4.1. Tombol Start Dan Stop Di HMI ......................................................................... 66
4.4.2. Ladder Pendeteksi Kondisi Gorden.................................................................... 67
4.4.3. Ladder Output Analog ........................................................................................ 68
4.4.4. Timer-TP (Timer pulse) Menggerakkan Motor DC ........................................... 69
4.4.5. Proses Login ....................................................................................................... 69
4.4.6. Script Animasi Pengendali Gorden .................................................................... 72
4.4.7. Script Animasi Pengendali Pintu Pagar ............................................................. 72
4.5. Komunikasi Via Ethernet Dan Konfirgurasi Tagname ............................................. 74
4.5.1. Konfigurasi I/O Server Pada MBENET dan InTouch ....................................... 74
4.5.2. Konfigurasi Alamat IP Pada PLC ...................................................................... 75
4.5.3. Konfigurasi Pengaturan Tagname ...................................................................... 76
BAB V KESIMPULAN DAN SARAN .............................................................................. 77
5.1. Kesimpulan ............................................................................................................... 77
5.2. Saran ......................................................................................................................... 77
DAFTAR PUSTAKA .......................................................................................................... 78
LAMPIRAN ........................................................................................................................ 81
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xv
DAFTAR GAMBAR
Gambar 1.1. Diagram Blok Perancangan Perangkat Keras ................................................... 4
Gambar 2.1. Bagian-bagian PLC TM221CE40R .................................................................. 7
Gambar 2.2. Ladder diagram NO .......................................................................................... 9
Gambar 2.3. Ladder diagram NC .......................................................................................... 9
Gambar 2.4. Sensor Ultraviolet ........................................................................................... 10
Gambar 2.5. Kurva responsivitas spectral ........................................................................... 10
Gambar 2.6. Keterangan index UV ..................................................................................... 11
Gambar 2.7. Simbol dan bentuk fisik LDR ........................................................................ 12
Gambar 2.8. Grafik kerja LDR ............................................................................................ 12
Gambar 2.9. Rangkaian pembagi tegangan ......................................................................... 13
Gambar 2.10. Sensor PIR (sensor gerak) ............................................................................ 14
Gambar 2.11. Piroelektrik PIR sensor ................................................................................. 14
Gambar 2.12. Jangkauan sensor PIR motion ....................................................................... 15
Gambar 2.13. Sensor limit switch ....................................................................................... 15
Gambar 2.14. Konstruksi dan simbol limit switch .............................................................. 16
Gambar 2.15. Simbol dan bentuk motor DC ....................................................................... 17
Gambar 2.16. Prinsip kerja motor DC ................................................................................. 17
Gambar 2.17. Simbol relay NO dan NC .............................................................................. 18
Gambar 2.18. Struktur sederhana relay ............................................................................... 18
Gambar 2.19. Skema sistem SCADA sederhana dalam pengendalian sistem .................... 19
Gambar 2.20. Tipe PLC dan rentang alamat yang didukung MBENET ............................. 25
Gambar 2.21. Bentuk modul TM3AM6 .............................................................................. 26
Gambar 2.22. Wiring diagram pada modul TM3AM6 ........................................................ 26
Gambar 2.23. Rangkaian dasar darlington NPN ................................................................. 27
Gambar 3.1. Ilustrasi prototipe Smarthome ........................................................................ 28
Gambar 3.2. Blok diagram prototipe SCADA untuk pengendali lampu, pengendali pintu
pagar rumah, dan pengendali gorden. .................................................................................. 30
Gambar 3.3. Mekanisme Pintu Pagar .................................................................................. 31
Gambar 3.4. Mekanisme Pengendali Gorden ...................................................................... 31
Gambar 3.5. Perancangan elektronis sensor LDR ............................................................... 32
Gambar 3.6. Karakteristik input analog sensor LDR .......................................................... 33
Gambar 3.7. Perancangan elektronis sensor UV ................................................................. 33
Gambar 3.8. Karakteristik input analog sensor UV............................................................. 34
Gambar 3.9. Perancangan elektronis sensor PIR ................................................................. 35
Gambar 3.10. Rangkaian pengendali arah putaran motor ................................................... 35
Gambar 3.11. Rangkaian driver current .............................................................................. 36
Gambar 3.12. Karakteristik output analog PLC .................................................................. 37
Gambar 3.13. Layer pertama sebagai menu utama ............................................................. 39
Gambar 3.14. Layer kedua tampilan animasi dari 3 objek .................................................. 40
Gambar 3.15. Diagram alir SCADA secara umum ............................................................. 41
Gambar 3.16. Diagram alir proses login.............................................................................. 42
Gambar 3.17. Diagram alir pengendali lampu .................................................................... 43
Gambar 3.18. Diagram alir pengendali pintu pagar ............................................................ 44
Gambar 3.19. Diagram alir pengendali Gorden .................................................................. 45
Gambar 4.1. Sensor Photodioda .......................................................................................... 46
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvi
Gambar 4.2. Tampilan perubahan menu utama ................................................................... 47
Gambar 4.3. Tampilan perubahan animasi pengendali ....................................................... 47
Gambar 4.4. Perubahan perancangan elektronis sensor PIR ............................................... 48
Gambar 4.5. Perubahan range sensor Ultraviolet ................................................................ 49
Gambar 4.6. Perubahan posisi sensor PIR ........................................................................... 49
Gambar 4.7. (a). Tampilan perangkat keras dari depan (b). Tampilan perangkat keras dari
belakang ............................................................................................................................... 50
Gambar 4.8. Mekanik pintu pagar ....................................................................................... 51
Gambar 4.9. Mekanik gorden .............................................................................................. 52
Gambar 4.10. Pengendali lampu.......................................................................................... 53
Gambar 4.11. Tombol start dan stop di prototipe ................................................................ 53
Gambar 4.12. Letak sensor PIR ........................................................................................... 54
Gambar 4.13. Posisi sensor LDR......................................................................................... 55
Gambar 4.14. Posisi sensor UV ........................................................................................... 55
Gambar 4.15. Tampilan perangkat keras rangkaian pembalik putaran motor..................... 56
Gambar 4.16. Tampilan perangkat keras rangkaian switch................................................. 56
Gambar 4.17. Ladder tombol start dan stop di HMI ........................................................... 67
Gambar 4.18. Tombol start dan stop di HMI ...................................................................... 67
Gambar 4.19. Ladder pendeteksi gorden ............................................................................. 68
Gambar 4.20. Ladder keluaran analog................................................................................. 68
Gambar 4.21. Ladder timer tipe TP (Timer-pulse) ............................................................. 69
Gambar 4.22. Tagname password dan username ................................................................ 69
Gambar 4.23. Tipe input Script dan disable ........................................................................ 70
Gambar 4.24. Script menampilkan layer kedua .................................................................. 70
Gambar 4.25. Tipe disable ................................................................................................... 71
Gambar 4.26. Program reset di button logout ..................................................................... 71
Gambar 4.27. Window script pengendali gorden ................................................................ 72
Gambar 4.28. Program buka gorden .................................................................................... 72
Gambar 4.29. Program tutup gorden ................................................................................... 72
Gambar 4.30. Window script pengendali pintu pagar ......................................................... 72
Gambar 4.31. Program buka pintu pagar ............................................................................. 73
Gambar 4.32. Program tutup pintu pagar ............................................................................ 73
Gambar 4.33. Hasil pengaturan topic definition pada MBENET ....................................... 74
Gambar 4.34. Hasil pengaturan access names pada Wonderware InTouch ........................ 75
Gambar 4.35. Hasil konfirgurasi alamat IP PLC ................................................................. 75
Gambar 4.36. Konfirgurasi pengaturan tagname ................................................................ 76
Gambar 4.37. Konfirgurasi pengaturan tagname ................................................................ 76
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xvii
DAFTAR TABEL
Tabel 2.1. Keterangan bagian-bagian PLC M221 .............................................................................. 8
Tabel 2.2. Tabel spesifikasi sensor UV [10] .................................................................................... 11
Tabel 3.1. Keterangan dan fungsi dari gambar 3.1 .......................................................................... 29
Tabel 3.2. Tingkat kecerahan lampu ................................................................................................ 38
Tabel 3.3. Pembagian input digital pada PLC .................................................................................. 38
Tabel 3.4. Pembagian input analog pada PLC ................................................................................. 38
Tabel 3.5. Pembagian output digital pada PLC ................................................................................ 38
Tabel 3.6. Pembagian output analog pada TM3AM6 ...................................................................... 39
Tabel 3.7. Pembagian memori pada PLC ......................................................................................... 40
Tabel 4.1. Jangkauan sensor PIR ..................................................................................................... 54
Tabel 4.2. Tampilan HMI Proses login ............................................................................................ 57
Tabel 4.3. Tampilan HMI proses aktif dan non aktif sistem ............................................................ 59
Tabel 4.4. Data proses input pengendali lampu ............................................................................... 60
Tabel 4.5. Tampilan HMI proses pengendali lampu ........................................................................ 60
Tabel 4.6. Data proses input pengendali pintu pagar ....................................................................... 62
Tabel 4.7. Tampilan HMI proses pengendali pintu pagar ................................................................ 63
Tabel 4.8. Data proses input pengendali gorden .............................................................................. 64
Tabel 4.9. Tampilan HMI proses pengendali gorden ....................................................................... 65
Tabel 4.10. Tagname yang digunakan di HMI ................................................................................. 74
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Seiring perkembangan zaman, teknologi tumbuh begitu pesat, bahkan hal yang
dulunya dianggap tidak mungkin kini bisa terealisasikan dengan bantuan teknologi.
Pertumbuhan ekonomi yang tinggi membuat permintaan rumah yang nyaman kian
meningkat [1] oleh sebab itu banyak muncul permasalahan yang ada di kehidupan sehari-
hari salah satunya seperti lupa mematikan lampu yang berakibat borosnya pemakaian
listrik. Berbagai teknologi yang diterapkan sebagai sistem otomasi salah satunya PLC
(Programmable Logic Controller), PLC salah satu komponen utama dalam sebuah sistem
SCADA.
SCADA (Supervisory Control and Data Acquition) adalah sebuah sistem yang
dirancang untuk sebuah pengendalian dan pengambilan data dalam pengawasan
(Operator/Manusia), biasanya SCADA digunakan untuk pengendalian suatu proses pada
industri. SCADA merupakan sistem yang terdiri dari banyak komponen penyusunnya yaitu
HMI (Human Machine Interface), PLC, MTU (Master Terminal Unit), RTU (Remote
Terminal Unit), dan sistem komunikasi [2]. Sistem SCADA terdapat PLC (Programmabel
Logic Controller) sebagai pengendali utama, PLC biasanya digunakan pada sistem dalam
industri untuk menggantikan sistem perkabelan (wiring). namun seiring perkembangan
waktu PLC juga digunakan pada sistem sebuah Smarthome. PLC yang digunakan adalah
Schneider M221, karena PLC ini memiliki port Ethernet yang memudahkan pemantauan
jarak jauh.
Dari penelitian Benekditus Tri Apriyanto dalam tugas akhir berjudul “Aplikasi PLC
Modicon M221 Untuk Smarthome dengan HMI Berbasis Android” sistem mempunyai
kemampuan pengendalian melalui HMI android via internet untk lampu (ON/OFF), motor
dc (buka/tutup pintu garasi dan pintu gerbang), serta pengaktifan indikator keamanan.
Aplikasi dari Smarthome ini terdiri dari pengendali lampu, pengendali motor, dan
pengendali keamanan. Proses pengendalian lampu terdiri dari lima buah lampu AC yang
dikendalikan dengan saklar manual dan HMI android (SCADATOUCH). Proses pengendali
motor terdiri dari motor DC 12V sebagai penggerak dikendalikan melalui HMI android
dan limit switch sebagai batas atas dan batas bawah. Proses yang terakhir adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
pengendalian keamanan. Pada pengendalian ini terdapat tiga sensor, yaitu: sensor PIR,
sensor ultraviolet, dan sensor cahaya/LDR. Sensor PIR berfungsi untuk mendeteksi
gerakan asing, sensor ultraviolet berfungsi untuk mendeteksi sinar UV dari matahari guna
mengendalikan lampu secara otomatis, dan sensor cahaya berfungsi untuk mendeteksi
manusia yang masuk melalui pintu rumah. Semua data dan peringatan akan ditampilkan
pada HMI android (SCADATOUCH). [3]
Berdasarkan latar belakang tersebut akan dibuat tugas akhir yaitu “SCADA sebuah
Smarthome untuk pengendali lampu, pengendali pintu pagar rumah, dan pengendali
gorden berbasis PLC Schneider M221”. Perbedaan dan kelebihan dari referensi yang ada
diatas adalah aplikasi tugas akhir ini dimonitoring melalui HMI dengan software
Wonderware Intouch yang memiliki kelebihan yang lebih dalam menggambarkan animasi-
animasi sistem secara real dan aktual.
Smarthome ini menggunakan PLC Schneider M221 berjenis TM221CE40R, PLC
jenis ini memiliki port I/0 berupa 24 digital input, 2 analog input, 16 digital output, 1
ethernet port, dan 1 serial line port sebagai kontroler. PLC ini didukung oleh software So
Machine Basic yang mudah dalam pemrograman dan terigentrasi dengan HMI yang
bertujuan untuk memonitor sistem Smarthome tersebut. Dari semua pengendali ini dibuat
sistem yang bisa di monitoring dengan Software Wonderware Intouch sebagai HMI.
1.2. Tujuan dan Manfaat
Pembuatan tugas akhir ini memiliki tujuan yang ingin dircapai adalah :
1. Merancang dan mengimplementasikan prototipe SCADA untuk pengendali lampu,
pengendali pintu pagar rumah, dan pengendali gorden dalam sebuah Smarthome
dengan PLC Schneider M221 dan dimonitoring melalui HMI. Aplikasi dengan
software Wonderware Intouch.
Manfaat pembuatan tugas akhir ini adalah :
1. Memberikan kenyamanan, keselamatan, penghematan dan keamanan bagi
penggunanya.
1.3. Batasan Masalah
Dalam pembuatan tugas akhir diperlukan batasan-batasan masalah mengenai judul,
sehingga tidak terjadinya penjelasan yang mengarah keluar dari judul yang dibuat. Berikut
ini batasan masalahnya :
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
3
1. Menggunakan PLC M221 sebagai pusat pengendali.
2. Menggunakan software Wonderware Intouch sebagai HMI.
3. Menggunakan sebuah sensor LDR (Light Dependent Resistor) untuk mensensing
intensitas cahaya yang digunakan sebagai input pengendali gorden.
4. Menggunakan sebuah sensor Ultraviolet untuk mensensing sinar Ultraviolet yang
digunakan sebagai input Pengendali Lampu.
5. Menggunakan sebuah sensor PIR (Passive Infrared) untuk mensensing pergerakan
yang digunakan sebagai input pengendali pintu pagar.
6. Menggunakan sebuah motor DC 6v yang dilengkapi gear sebagai penggerak pintu
pagar rumah.
7. Menggunakan sebuah motor DC 6v sebagai penggerak gorden.
8. Menggunakan Lampu DC 12V sebagai output pengendali lampu.
9. Pada pengendali pintu pagar rumah menggunakan dua LS (Limit switch) sebagai
saklar pembatas maximum dan minimum dan menghentikan gerakan motor.
10. Menggunakan Relay untuk melindungi output dari tegangan berlebih dan sebagai
pengendali arah putaran motor.
11. Komunikasi antara PC dan PLC via Ethernet.
1.4. Metologi Penelitian
Bedasarkan pada tujuan dan manfaat yang ingin dicapai maka metode-metode
penelitian yang digunakan dalam penyusunan tugas akhir adalah :
1. Studi literatur, yaitu dengan cara mengumpulkan dan mempelejari data-data dari buku
atau jurnal tentang PLC Schneider M221, wonderware intouch, dan somachine basic.
2. Perancangan perangkat keras dan lunak dapat dilihat di gambar 1.1. Rancangan sistem
terdiri dari beberapa sensor sebagai input, output berupa lampu DC, motor DC 1 dan
motor DC 2 serta perangkat lunak seperti ladder diagram PLC dan HMI. Sistem ini
dikendalikan sebuah PLC M221 untuk pengendali gorden, pengendali lampu, dan
pengendali pintu pagar. Tahap ini mencari bentuk sistem yang optimal dengan
mempertimbangkan beberapa faktor bedasarkan permasalahan dan kebutuhan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
Gambar 1.1. Diagram Blok Perancangan Perangkat Keras
3. Pembuatan perangkat keras dan lunak. Bedasarkan gambar 1.1, maka perangkat keras
yang dibuat meliputi konfirgurasi input dengan PLC, konfirgurasi PLC dengan output
dan relay untuk motor DC 1 serta motor DC 2. Perangkat lunak dari kerja sistem
meliputi sensor sebagai masukan mengirim data ke PLC yang sudah terdapat program
ladder yang berfungsi untuk mengendalikan output berupa motor DC serta lampu DC
dan data dari PLC dikirim ke HMI yang digunakan sebagai proses pemantauan secara
real time.
4. Proses pengambilan data. Pengambilan data untuk sensor Utraviolet dengan cara
memberikan sinar matahari dengan level yang berbeda pada saat pagi, siang, sore, dan
malam. Data yang diambil adalah banyaknya sinar ultraviolet yang diterima untuk
menghidupkan dan mematikan lampu. Pengambilan data untuk sensor LDR dengan
cara memberikan cahaya dengan level yang berbeda. Data yang diambil adalah pada
tegangan berapakah gorden akan membuka dan menutup. Untuk sensor PIR
pengambilan data dilakukan dengan cara memberi gerakan pada jarak yang berbeda.
Data yang diambil adalah aktif atau tidak aktif sensor pada jarak yang berbeda. Untuk
sensor limit switch data yang diambil berupa tegangan pada saat kondisi limit switch
on atau off dan yang terakhir membandingkan respon pada prototipe dengan proses
animasi pada HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

5
5. Analisis dan kesimpulan hasil percobaan. Analisis data dilakukan dengan mendeteksi
perubahan tegangan pada sensor, menganalisa keluaran dari semua objek pada
prototipe saat diberi input dengan bermacam-macam kondisi yang berbeda, dan
menganalisa proses pada prototipe dengan tampilan HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
6
BAB II
DASAR TEORI
Bab ini menjelaskan dasar-dasar teori dari semua komponen utama tugas akhir yang
berjudul “SCADA sebuah Smarthome untuk pengendali lampu, pengendali pintu pagar
rumah, dan pengendali gorden berbasis PLC Schneider M221”. Komponen-komponen
yang digunakan antara lain: Programmable Logic Controller (PLC), Human Machine
Interface (HMI), sensor Ultraviolet, sensor Pergerakan, sensor LDR (Light dependent
resistor), Relay, Limit switch, Motor DC, Lampu DC.
2.1. Smarthome [4]
Smarthome (rumah cerdas) adalah rumah yang menyediakan kenyamanan, keamanan
efisiensi energi bagi rumah setiap saat. Teknologi ini dapat bekerja saat orang ada di rumah
maupun tidak ada di rumah. Dikarenakan Smarthome sebuah sistem otomatis sehingga
memberi kenyamanan, keselamatan, penghematan dan keamanan bagi penggunanya.
Smarthome tidak hanya diterapkan pada rumah tapak saja, melainkan hunian tingkat
atas seperti apartemen. Dengan begitu penghuni rumah maupun apartemen tidak perlu
repot mengontrol properti yang ada seperti lampu, pintu pagar rumah, dan gorden.
Pada awalnya ide tentang smarthome dibuat untuk orang-orang non difabel seiring
berjalan waktu Smarthome sekarang tidak hanya digunakan pada orang yang non difabel
melainkan juga digunakan pada orang yang berkebutuhan khusus.
2.2. Programmabel Logic Controller [5]
PLC adalah komputer elektronik yang mudah digunakan (user friendly) yang
memiliki fungsi kendali untuk berbagai tipe dan tingkat kesulitan yang beraneka ragam.
Definisi Programmable Logic Controller menurut Capiel (1982) adalah "sistem elektronik
yang beroperasi secara digital dan di desain untuk pemakaian di lingkungan industri,
dimana sistem ini menggunakan memori yang dapat diprogram untuk penyimpanan secara
internal instruksi-instruksi yang mengimplementasikan fungsi-fungsi spesifik seperti
logika, urutan, perwaktuan, pencacahan dan operasi aritmatik untuk mengontrol mesin atau
proses melalui modul I/O digital maupun analog. Bedasarkan namanya konsep PLC adalah
sebagaiberikut:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
7
1. Programmable, menunjukkan kemampuan dalam hal memori untuk menyimpan
program yang telah dibuat yang dengan mudah diubah-ubah fungsi atau kegunaannya.
2. Logic, menunjukkan kemampuan dalam memproses input secara aritmatik dan logic
(ALU), yakni melakukan operasi membandingkan, menjumlahkan, mengalikan,
membagi, mengurangi, negasi, AND, OR, dan lain sebagainya.
3. Controller, menunjukkan kemampuan dalam mengontrol dan mengatur proses sehingga
menghasilkan output yang diinginkan.
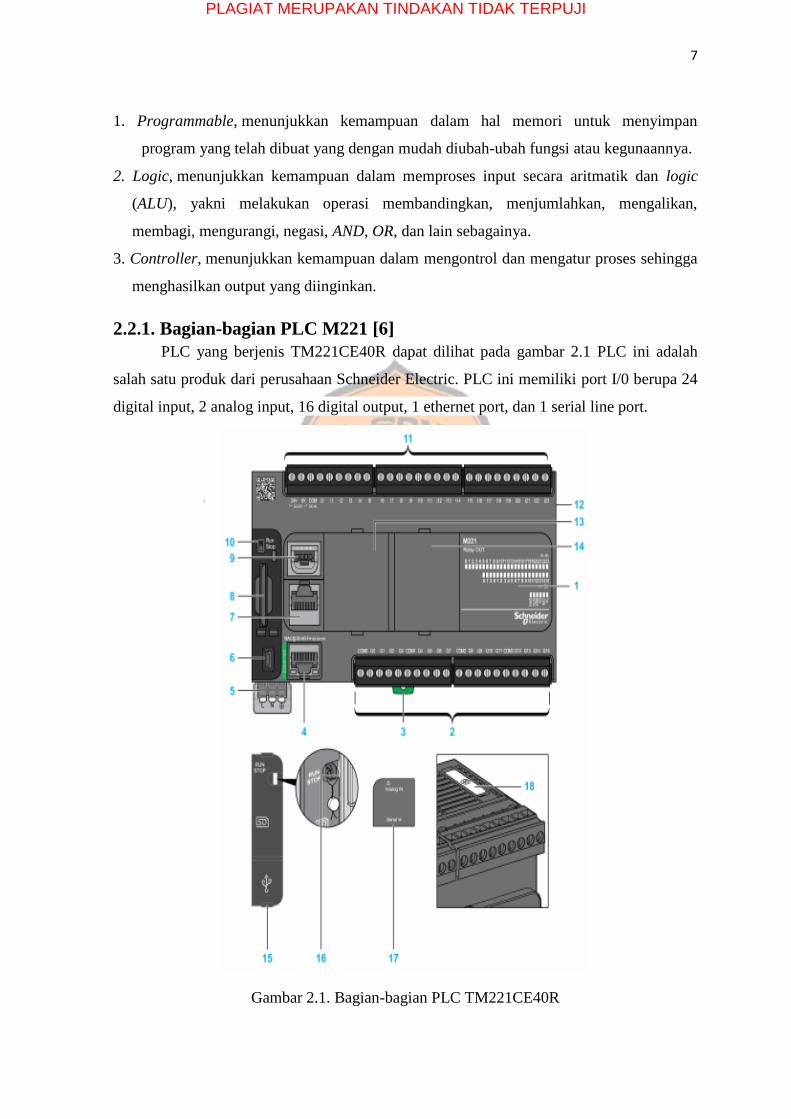
2.2.1. Bagian-bagian PLC M221 [6]
PLC yang berjenis TM221CE40R dapat dilihat pada gambar 2.1 PLC ini adalah
salah satu produk dari perusahaan Schneider Electric. PLC ini memiliki port I/0 berupa 24
digital input, 2 analog input, 16 digital output, 1 ethernet port, dan 1 serial line port.
Gambar 2.1. Bagian-bagian PLC TM221CE40R
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
Keterangan dari setiap bagian-bagian PLC M221 dapat dilihat pada tabel 2.1.
Tabel 2.1. Keterangan bagian-bagian PLC M221
No Keterangan
1 Status LEDs
2 Blok terminal keluaran
3 Klip pengunci ukuran 35mm
4 Port Ethernet/konektor RJ45
5 Catu daya 110-240 VAC
6 Port mini USB
7 Port serial 1
8 Slot SD Card
9 Masukan 2 analog
10 Saklar Run/Stop
11 Blok terminal masukan
12 Konektor penambahan modul I/O
13 Cartridge slot 1
14 Cartridge slot 2
15 Tutup pelindung
16 Locking hook
17 Pelindung masukan analog
18 Penahan baterai
2.2.2. Memori PLC M221 [7]
Pada PLC M221 terdapat 3 jenis memori yang dapat digunakan sesuai dengan
fungsinya masing-masing yaitu:
1. Memori bit (%M)
Object Memory bit %M dalam SoMachine Basic tersedia 1024. Memory bit ini
disimpan pada zona memori tersendiri dan Memori ini hanya dapat bernilai 1 dan 0.
2. Memori word (%MW)
Object Memory Word %MW dalam SoMachine Basic tersedia 8000. Nilai %MW
dapat berubah-ubah selama program PLC dijalankan. Memori ini biasa digunkan untuk
oprasi counter.
3. Konstanta word (%KW)
Object Constant Memory Word %KW dalam SoMachine Basic tersedia 512. Nilai
%KW tidak dapat berubah-ubah selama program PLC dijalankan.
2.2.3. Diagram ladder [8]
Ladder diagram (diagram tangga) merupakan metode pemrograman PLC yang
paling popular, karena PLC pertama yang diciptakan menggunakan bahasa pemrograman
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

9
ini. Hal itu dikarenakan PLC merupakan perkembangan dari relay logic control yang
menggunakan bahasa pemrograman relay ladder logic. Ada beberapa hal yang perlu
diperhatikan dalam pemrograman PLC menggunakan ladder diagram :
1. Program dibaca dari kiri ke kanan dan dari atas ke bawah.
2. Rung tidak boleh diakhiri tanpa output.
3. Output (coil) dan input (contact) ditampilkan dalam kondisi normal.
4. Input/output diidentifikasi dengan alamat.
Pada ladder diagram terdapat normal contact yang mengacu pada konsep NO
(Normally Open) dan NC (Normally Closed) dari relay contact, terdapat pada gambar 2.2
dan 2.3.
1. Normally Open (NO)
Contact ini menandakan keadaan relay yang dalam keadaan normalnya dalam
posisi terbuka, dan akan terhubung jika relay mendapat tegangan.
Gambar 2.2. Ladder diagram NO
2. Normally Closed (NC)
Contact ini menandakan keadaan relay yang dalam keadaan normalnya dalam
posisi terhubung, dan akan terbuka jika relay mendapat tegangan.
Gambar 2.3. Ladder diagram NC
2.3. Sensor [9]
Sensor adalah peralatan yang digunakan untuk mengubah suatu besaran fisik menjadi
besaran listrik sehingga dapat dianalisa dengan rangkaian listrik tertentu. Hampir seluruh
peralatan elektronik yang ada mempunyai sensor didalanya. Pada saat ini, sensor tersebut
telah dibuat dengan ukuran sangat kecil. Ukuran yang sangat kecil sangat memudahkan
pemakaian dan menghemat energi. Sensor merupakan bagian dari transducer yang
berfungsi unutk melakukan sensing atau “ merasakan dan menangkap “ adanya perubahan
energi eksternal yang akan masuk ke bagian input dari transducer, sehingga perubahan
kapasitas energi yang ditangkap segera dikirim kepada bagian konverter dari transducer
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

10
untuk diubah menjadi energi listrik. Dalam lingkungan sistem pengendali dan robotika,
sensor memberikan kesamaan yang menyerupai mata, pendengaran, hidung, lidah yang
kemudian akan diolah oleh kontroler sebagai otaknya.
2.3.1. Sensor Ultraviolet [10]
Sensor ultraviolet adalah sensor yang digunakan pada pengendali lampu. sensor ini
digunakan untuk mendeteksi intensitas radiasi ultraviolet. Salah satu tipe sensor ultraviolet
yaitu GUVA-S12D sensor yang berjenis ini bisa mendeteksi rentang cahaya 200 nm – 370
nm dapat dilihat pada gambar 2.4. Sensor ini memiliki tegangan input sebesar 3.3 V – 5.5
V dan mempunyai keluaran analog.
Gambar 2.4. Sensor Ultraviolet
2.3.1.1. Prinsip Kerja Sensor Ultaviolet
Sensor UV ini bekerja di bawah sinar matahari. Pada saat sensor UV di bawah
matahari indeks UV dan kurva responsivitas dapat dilihat pada gambar 2.5.
Gambar 2.5. Kurva responsivitas spectral [10]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
11
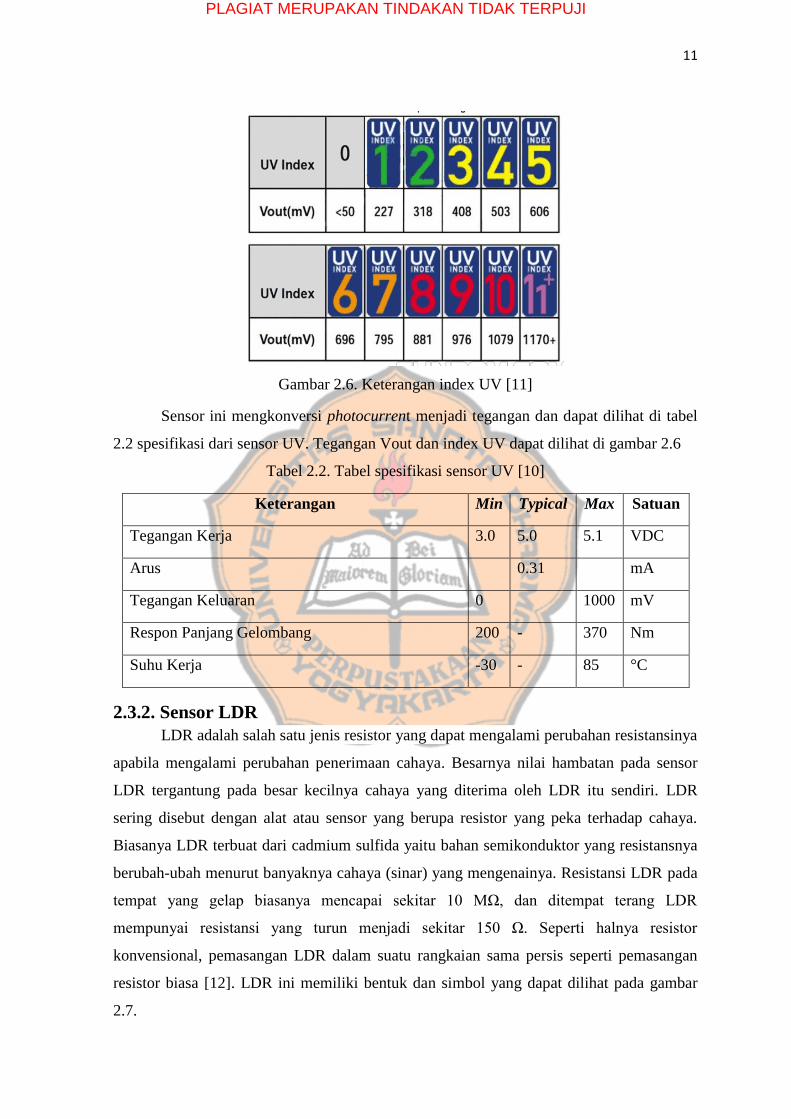
Gambar 2.6. Keterangan index UV [11]
Sensor ini mengkonversi photocurrent menjadi tegangan dan dapat dilihat di tabel
2.2 spesifikasi dari sensor UV. Tegangan Vout dan index UV dapat dilihat di gambar 2.6
Tabel 2.2. Tabel spesifikasi sensor UV [10]
Keterangan Min Typical Max Satuan
Tegangan Kerja 3.0 5.0 5.1 VDC
Arus 0.31 mA
Tegangan Keluaran 0 1000 mV
Respon Panjang Gelombang 200 - 370 Nm
Suhu Kerja -30 - 85 °C
2.3.2. Sensor LDR
LDR adalah salah satu jenis resistor yang dapat mengalami perubahan resistansinya
apabila mengalami perubahan penerimaan cahaya. Besarnya nilai hambatan pada sensor
LDR tergantung pada besar kecilnya cahaya yang diterima oleh LDR itu sendiri. LDR
sering disebut dengan alat atau sensor yang berupa resistor yang peka terhadap cahaya.
Biasanya LDR terbuat dari cadmium sulfida yaitu bahan semikonduktor yang resistansnya
berubah-ubah menurut banyaknya cahaya (sinar) yang mengenainya. Resistansi LDR pada
tempat yang gelap biasanya mencapai sekitar 10 MΩ, dan ditempat terang LDR
mempunyai resistansi yang turun menjadi sekitar 150 Ω. Seperti halnya resistor
konvensional, pemasangan LDR dalam suatu rangkaian sama persis seperti pemasangan
resistor biasa [12]. LDR ini memiliki bentuk dan simbol yang dapat dilihat pada gambar
2.7.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
Gambar 2.7. Simbol dan bentuk fisik LDR [13]
Umumnya Sensor LDR memiliki nilai hambatan 200 Kilo Ohm pada saat dalam
kondisi sedikit cahaya (gelap), dan akan menurun menjadi 500 Ohm pada kondisi terkena
banyak cahaya. Tak heran jika komponen elektronika peka cahaya ini banyak
diimplementasikan sebagai sensor lampu penerang jalan, lampu kamar tidur, alarm dan
lain-lain. [13]
2.3.2.1. Prinsip Kerja Sensor LDR
Cara kerja LDR adalah menghambat aliran arus listrik apabila tidak ada bekas
cahaya yang mengenai permukaan atas LDR. Apabila intensitas cahaya yang mengenai
permukaan LDR kecil (sedikit), maka nilai resistansi LDR akan besar (RLDR = besar)
sebaliknya Apabila intensitas cahaya yang mengenai permukaan LDR besar (banyak),
maka nilai resistansi LDR akan kecil (RLDR = kecil) grafik kerja LDR dapat dilihat pada
gambar 2.8. [14]
Gambar 2.8. Grafik kerja LDR[14]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
Gambar 2.9. Rangkaian pembagi tegangan
Pada gambar 2.9 menunjukan rangkaian pembagi tegangan yang digunakan pada
input sensor LDR. Rumus dari pembagi tegangan bisa dilihat di persamaan 2.1.
(2.1)
Dengan Vout = Tegangan keluaran
R1 = Resistensi pada sensor LDR
R2 = Resistensi pada resistor
Vin = Tegangan masukan
2.3.3. Sensor Pergerakan PIR HC-SR501
Sensor PIR (sensor gerak) adalah sensor yang berfungsi untuk pendeteksi gerakan
yang bekerja dengan cara mendeteksi adanya perbedaan/perubahan suhu sekarang dan
sebelumnya. Sensor gerak menggunakan modul pir sangat simpel dan mudah
diaplikasikan. Modul PIR hanya membutuhkan tegangan input DC 5V dan cukup efektif
untuk mendeteksi gerakan hingga jarak 5 meter. Ketika tidak mendeteksi gerakan, keluaran
modul adalah LOW. Dan ketika mendeteksi adanya gerakan, maka keluaran akan berubah
menjadi HIGH. Adapun lebar pulsa HIGH adalah ±0,5 detik. Sensitifitas Modul PIR yang
mampu mendeteksi adanya gerakan pada jarak 5 meter memungkinkan kita membuat suatu
alat pendeteksi gerak dengan keberhasilan lebih besar. Sensor PIR dapat dilihat pada
gambar 2.10. [15]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
Gambar 2.10. Sensor PIR (sensor gerak) [15]
2.3.3.1. Prinsip Kerja Sensor Pergerakan
Pada dasarnya sensor PIR terbuat dari sensor Piroelektrik (logam yang berbentuk
bulat) yang berfungsi untuk mendeteksi kadar radiasi inframerah dapat dilihat pada gambar
2.11. [3]
Gambar 2.11. Piroelektrik PIR sensor[16]
Semuanya dapat memancarkan radiasi yang rendah, dan semakin panas sesuatu,
maka radiasi yang dipancarkan akan semakin besar dan banyak. Sensor pendeteksi
pergerakan ini dibagi menjadi dua bagian. Alasan untuk itu adalah mendeteksi pergerakan
(perubahan) bukan pada tingkat inframerah rata-rata. Dua bagian ini terhubung, sehingga
dapat menbatalkan satu sama lain. Jika salah satu bagian melihat kurang atau lebih dari
radiasi IR terdeteksi, maka keluaran akan tinggi atau rendah. [3]
Gambar 2.12 adalah jangkauan dari sensor PIR motion, apabila dilihat dari depan
sensor ini membentuk lingkaran dengan jarak yang berbeda. Sensor ini membaca intensitas
inframerah mencapai jarak 2,4m. Sensor ini bekerja dengan luasan 5m dan sudut 90°
kesamping, dan 90° bagian atas hingga ke bawah. [16]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

15
Gambar 2.12. Jangkauan sensor PIR motion [16]
2.3.4 Limit switch
Limit switch adalah saklar atau perangkat elektromekanis yang mempunyai tuas
aktuator sebagai pengubah posisi kontak terminal dari Normally Open/ NO ke Close atau
sebaliknya dari Normally Close/NC ke Open. Posisi kontak akan berubah ketika tuas
aktuator tersebut terdorong atau tertekan oleh suatu objek. Sama halnya dengan saklar pada
umumnya, limit switch juga hanya mempunyai 2 kondisi, yaitu menghubungkan atau
memutuskan aliran arus listrik. Dengan kata lain hanya mempunyai kondisi ON atau Off
[17]. Sensor limit switch dapat dilihat pada gambar 2.13.
Gambar 2.13. Sensor limit switch [18]
2.3.4.1 Prinsip Kerja Limit switch [19]
Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya pada
batas/daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau
penghubungan rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
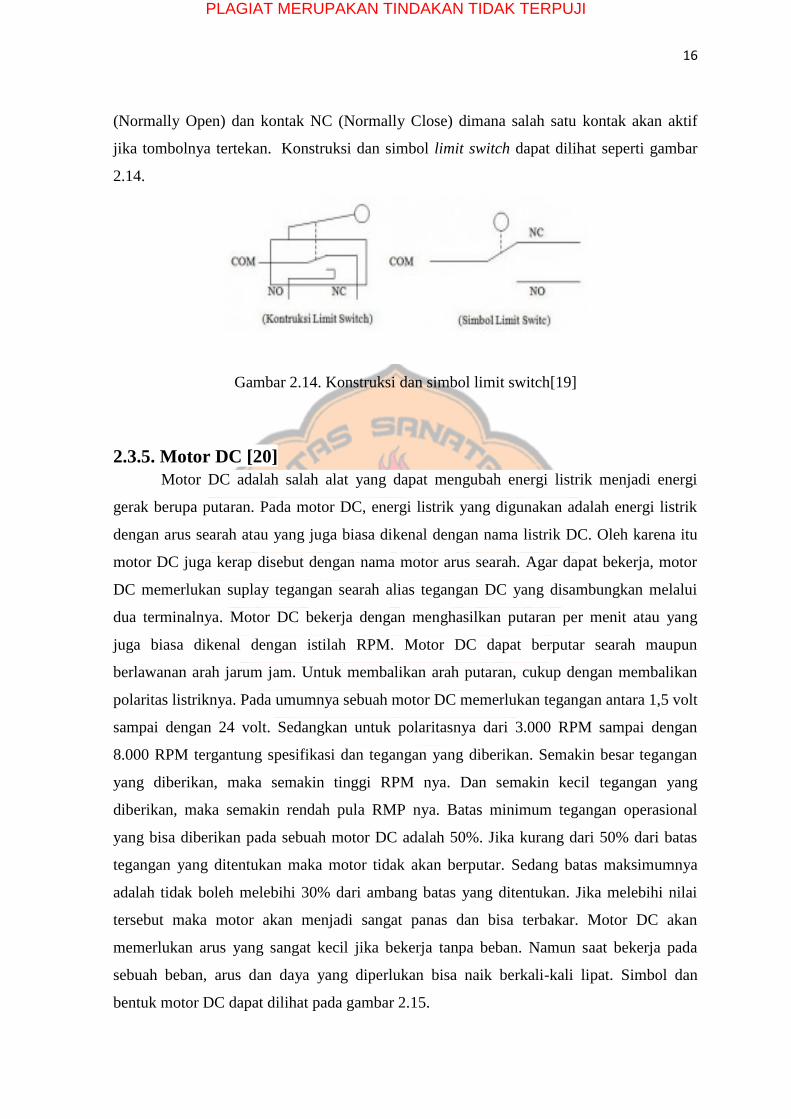
16
(Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan aktif
jika tombolnya tertekan. Konstruksi dan simbol limit switch dapat dilihat seperti gambar
2.14.
Gambar 2.14. Konstruksi dan simbol limit switch[19]
2.3.5. Motor DC [20]
Motor DC adalah salah alat yang dapat mengubah energi listrik menjadi energi
gerak berupa putaran. Pada motor DC, energi listrik yang digunakan adalah energi listrik
dengan arus searah atau yang juga biasa dikenal dengan nama listrik DC. Oleh karena itu
motor DC juga kerap disebut dengan nama motor arus searah. Agar dapat bekerja, motor
DC memerlukan suplay tegangan searah alias tegangan DC yang disambungkan melalui
dua terminalnya. Motor DC bekerja dengan menghasilkan putaran per menit atau yang
juga biasa dikenal dengan istilah RPM. Motor DC dapat berputar searah maupun
berlawanan arah jarum jam. Untuk membalikan arah putaran, cukup dengan membalikan
polaritas listriknya. Pada umumnya sebuah motor DC memerlukan tegangan antara 1,5 volt
sampai dengan 24 volt. Sedangkan untuk polaritasnya dari 3.000 RPM sampai dengan
8.000 RPM tergantung spesifikasi dan tegangan yang diberikan. Semakin besar tegangan
yang diberikan, maka semakin tinggi RPM nya. Dan semakin kecil tegangan yang
diberikan, maka semakin rendah pula RMP nya. Batas minimum tegangan operasional
yang bisa diberikan pada sebuah motor DC adalah 50%. Jika kurang dari 50% dari batas
tegangan yang ditentukan maka motor tidak akan berputar. Sedang batas maksimumnya
adalah tidak boleh melebihi 30% dari ambang batas yang ditentukan. Jika melebihi nilai
tersebut maka motor akan menjadi sangat panas dan bisa terbakar. Motor DC akan
memerlukan arus yang sangat kecil jika bekerja tanpa beban. Namun saat bekerja pada
sebuah beban, arus dan daya yang diperlukan bisa naik berkali-kali lipat. Simbol dan
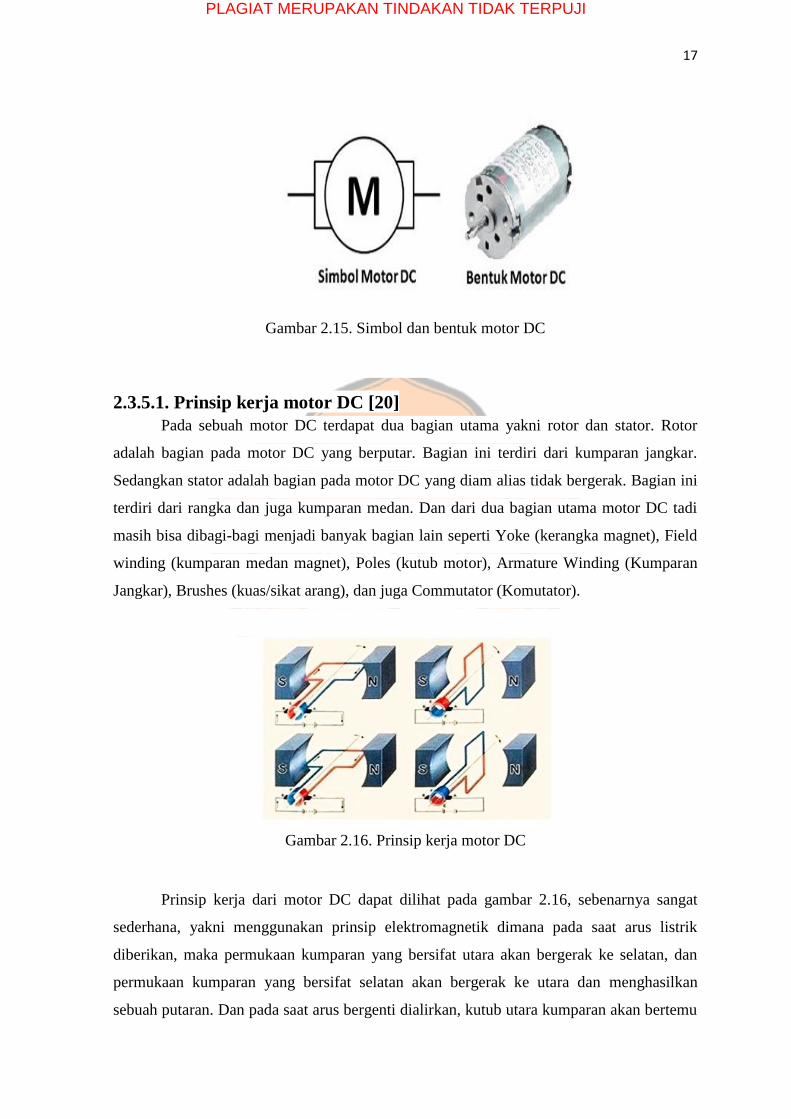
bentuk motor DC dapat dilihat pada gambar 2.15.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
17
Gambar 2.15. Simbol dan bentuk motor DC
2.3.5.1. Prinsip kerja motor DC [20]
Pada sebuah motor DC terdapat dua bagian utama yakni rotor dan stator. Rotor
adalah bagian pada motor DC yang berputar. Bagian ini terdiri dari kumparan jangkar.
Sedangkan stator adalah bagian pada motor DC yang diam alias tidak bergerak. Bagian ini
terdiri dari rangka dan juga kumparan medan. Dan dari dua bagian utama motor DC tadi
masih bisa dibagi-bagi menjadi banyak bagian lain seperti Yoke (kerangka magnet), Field
winding (kumparan medan magnet), Poles (kutub motor), Armature Winding (Kumparan
Jangkar), Brushes (kuas/sikat arang), dan juga Commutator (Komutator).
Gambar 2.16. Prinsip kerja motor DC
Prinsip kerja dari motor DC dapat dilihat pada gambar 2.16, sebenarnya sangat
sederhana, yakni menggunakan prinsip elektromagnetik dimana pada saat arus listrik
diberikan, maka permukaan kumparan yang bersifat utara akan bergerak ke selatan, dan
permukaan kumparan yang bersifat selatan akan bergerak ke utara dan menghasilkan
sebuah putaran. Dan pada saat arus bergenti dialirkan, kutub utara kumparan akan bertemu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
kutub selatan magnet dan menyebabkan saling tarik menarik sehingga motor berhenti
berputar.
2.3.6. Relay [21]
Relay merupakan komponen elektronika berupa saklar atau switch elektrik yang
dioperasikan secara listrik dan terdiri dari 2 bagian utama yaitu Elektromagnet (coil) dan
mekanikal (seperangkat kontak Saklar/Switch). Komponen elektronika ini menggunakan
prinsip elektromagnetik untuk menggerakan saklar sehingga dengan arus listrik yang kecil
(low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Berikut adalah
simbol dari komponen relay. Dapat dilihat pada gambar 2.17.
Gambar 2.17. Simbol relay NO dan NC
2.3.6.1. Prinsip kerja relay [21]
Sebuah relay terdapat 4 bagian penting yaitu electromagnet (coil), Armature,
Switch Contact Point (saklar) dan spring. Untuk lebih jelasnya silahkan lihat gambar 2.18.
Gambar 2.18. Struktur sederhana relay
Berdasarkan gambar 2.18, iron core (besi) yang dililitkan oleh kumparan coil
berfungsi untuk mengendalikan iron core tersebut. Ketika kumparan coil di berikan arus
listrik, maka akan timbul gaya elektromagnet sehingga akan menarik Armature berpindah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
posisi yang awalnya NC (tertutup) ke posisi NO (terbuka) sehingga menjadi saklar yang
dapat menghantarkan arus listrik di posisi NO. Posisi Armature yang tadinya dalam
kondisi CLOSE akan menjadi OPEN atau terhubung. Armature akan kembali keposisi
CLOSE saat tidak dialiri listrik. Coil yang digunakan untuk menarik Contact Point ke
posisi CLOSE umunnya hanyak membutuhkan arus llistrik yang relatif kecil.
2.4. SCADA [22]
SCADA merupakan sistem yang dapat melakukan pengawasan, pengendalian, dan
akuisisi data terhadap sebuah plant. Adanya jarak yang jauh antara plant dengan operator
menjadi alasan dibutuhkannya sebuah sistem SCADA yang dilengkapi dengan peralatan
komunikasi yang memadai. Menurut NIST (National Institute of Standards and
Technology), sistem SCADA banyak digunakan pada sistem terdistribusi seperti : sistem
distribusi air dan penampungan limbah air, saluran pipa minyak dan gas, transmisi dan
distribusi jaringan listrik, dan sistem transportasi kereta api. Sistem SCADA sederhana
dapat dilihat pada gambar 2.19.
Gambar 2.19. Skema sistem SCADA sederhana dalam pengendalian sistem
2.4.1. Arsitektur Sistem SCADA
Pada sebuah sistem SCADA terdapat 6 bagian utama supaya sistem dapat bekerja
dengan baik,yaitu :
1. Operator
Operator merupakan orang yang mengawasi sistem SCADA dan melakukan fungsi
supervisory control untuk operasi plant jarak jauh.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

20
1. Human Machine Interfaces
HMI menampilkan data untuk operator dan menyediakan input kontrol bagi operator
dalam berbagai bentuk seperti grafik, skematik, jendela, menu pull-down, dan tombol.
2. Master Terminal Unit
MTU merupakan unit master pada arsitektur master/slave, MTU berfungsi
menampilkan data pada operator melalui HMI, mengumpulkan data dari plant yang
jauh, dan mengirim sinyal kontrol ke plant yang berjauhan.
3. Communication System
Sistem komunikasi antara MTU dengan RTU ataupun antara RTU dengan field
device dapat berupa :
1. Komunikasi serial (RS232, RS422, RS485)
2. Ethernet
3. Jaringan telepon tetap
4. Leased lines
5. Internet
6. Wireless (wireless LAN, GSM network, modem radio)
4. Remote Terminal Unit
RTU merupakan unit slave pada arsitektur master/slave. RTU mengirimkan sinyal
kontrol pada plant yang dikendalikan, mengambil data dari plant, dan mengirim data ke
MTU.
5. Field Device
Field device merupakan plant di lapangan yang terdiri dari berbagai sensor dan
aktuator. Nilai sensor dan aktuator inilah yang diawasi dan dikendalikan supaya plant
dapat berjalan sesuai dengan keinginan pengguna.
2.5. Wonderware In Touch [22]
Wonderware InTouch merupakan software utama yang mendasari keseluruhan
program SCADA. Pada dasarnya, InTouch adalah software Human Machine Interface
yang juga dilengkapi dengan fitur dasar SCADA software.
Wonderware juga memiliki berbagai program untuk mendukung keseluruhan sistem
SCADA, seperti :
1. Wonderware Historian, program yang menangani database berbasis SQL server.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
2. Wonderware Information Software, program yang menangani pembuatan portal internet
untuk aplikasi HMI/SCADA.
3. Wonderware Active Factory, program untuk melakukan analisa serta laporan dari data di
lapangan. Program ini dapat terhubung dengan Microsoft Word dan Microsoft Excell.
4. Wonderware InControl, program pengendalian yang dapat meggantikan PLC sebagai
soft control (PC based control).
2.5.1. Wonderware InTouch Script dan Animasi
Secara umum, ada 3 langkah dasar yang perlu dilakukan untuk membuat suatu
aplikasi pada Wonderware InTouch, yaitu :
1. Menggambar (darwing)
2. Inisialisasi tagname
3. Menggerakkan (animating)
Pada bagian ini akan dibahas khusus tentang cara menggerakkan objek-objek yang
sudah digambar dan diberi tagname pada bagian sebelumnya. Peran script tentunya sangat
penting untuk proses animasi ini.
A. Macam-macam Script
Pemrograman pada Wonderware InTouch menggunakan InTouch Quick Script. Tipe
script ini relative mudah digunakan karena memanfaatkan struktur high level language
(seperti pada Bahasa pemrograman Pascal) yang telah disederhanakan sehingga orang
awam yang bukan programmer juga dapat memprogram Wonderware InTouch. Ada
banyak cara untuk meletakkan script pada aplikasi, seperti :
1. Application. Script jenis ini digunakan untuk memprogram keseluruhan window yang
ada pada aplikasi.
2. Key. Script yang akan dilakukan saat tombol keyboard tertentu ditekan.
3. Condition. Script yang akan dikerjakan jika terjadi kondisi tertentu dari suatu tagname,
kondisi dinyatakan dalam ekspresi tertentu.
4. Data Change. Script yang akan dieksekusi jika terjadi perubahan nilai pada tagname
tertentu.
B. Animasi
Animasi adalah proses memberi “nyawa” dari objek-objek yang telah digambar dan
diberi tagname. Animasi ini penting karena akan sangat mempermudah operator dalam
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
22
memahami, mengawasi, dan mengendalikan proses-proses yang terjadi pada plant. Cara
yang mudah untuk memberikan efek animasi pada gambar ialah dengan melakukan klik
kiri objek dua kali atau meng-klik kanan dan memilih Animation Link. Animation Link
sendiri terdiri dari 2 bagian besar: Touch Link dan Display Link. Touch Link digunakan
untuk mengatur interaksi antara operator dengan program, sedangkan display link
digunakan untuk mengatur animasi pada tampilan objek. Terdapat 4 jenis animasi yang
akan dibahas, yaitu :
1. Animasi Diskrit
Animasi yang paling mudah dilakukan ialah animasi diskrit, yang berarti hanya ada
dua kondisi dari objek yang dimanipulasi. Misalnya, warna isi objek berpindah dari merah
ke hijau dan sebaliknya. Peralatan yang statusnya dapat ditampilkan (maupun diubah)
dengan jenis animasi ini tentunya juga peralatan diskrit (contoh: tombol, status on-off
motor, limit switch). Berikut ini pembahasan fitur yang berhubungan dengan animasi
diskrit.
Display Link-Fill Color berguna untuk memberi warna objek berdasarkan dua
kondisi yaitu True (1) dan False (0) dari ekspresi yang digunakan. Kotak Expression bisa
diisi dengan Tagname atau rumus logika tertentu yang memiliki kondisi discrete.
Pada fitur Line Color prinsip kerjanya sama dengan fill color hanya saja line color
yang berubah-ubah adalah garis pembatas objek, bukan isinya. Demikian juga halnya
dengan fitur Text Color, dimana yang berubah-ubah adalah warna teksnya.
Display Link-Miscellanous terdiri dari Blink (untuk mengatur efek kedipan),
visibility (untuk membantu proses animasi dan security), serta disable (untuk kepentingan
security).
Display Link-Visibility digunakan untuk menampilkan atau menghilangkan suatu
objek berdasarkan nilai pada expression. Visibility state mengatur apakah objek akan
tampil (on) atau hilang (off) saat nilai pada expression benar.
2. Animasi Analog
Animasi analog ialah animasi yang dilakukan dalam suatu range nilai tertentu.
Jangkauannya jauh lebih luas daripada animasi diskrit. Peralatan yang ditampilkan
kondisinya ataupun diubah statusnya ialah peralatan analog (contoh: potensiometer,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
23
pengaturan kecepatan motor, sensor suhu analog). Contoh animasi analog misalnya ialah
animasi gerakan barang dari satu tempat ke tempat lain pada conveyor.
Display Link-Percent Fill-Vertical digunakan untuk mengisi objek secara vertikal
berdasarkan expression yang diberikan. Berikut ini beberapa isian yang perlu diberikan :
1. Parameter: nilai saat berada pada posisi terendah (Value at Min Fill) dan tertinggi (Value
at Max Fill).
2. Persentase isian objek ditentukan oleh Min dan Max % Fill.
3. Warna latar pengisian (background color) dan arah pengisian (direction) dapat diatur.
Display Link-Location-Horizontal digunakan untuk menggerakkan objek secara
horizontal. Isian-isian yang perlu diberikan :
1. Besar pergerakan sesuai dengan nilai pada expression.
2. Value mendefinisikan nilai pada posisi paling kiri (At Left End) dan kanan (At Right
End).
3. Horizontal Movement digunakan untuk mendefinisikan jauh dekatnya gerakan objek.
Display Link-Object Size (Height) digunakan untuk mengubah besarnya ukuran
ketinggian objek berdasarkan nilai yang diberikan. Anchor dipakai untuk menentukan dari
mana objek tersebut mulai berada.
3. Value Display
Value Display ialah fitur untuk menampilkan nilai/kondisi suatu instrument (misal:
sensor suhu, status nyala mati motor) ataupun nama operator pada aplikasi Wonderware
InTouch. Hal ini tentu sangat membantu operator dalam mengamati berbagai peralatan dan
proses yang terjadi pada plant, untuk mewujudkan hal di atas digunakan link berikut.
Display Link-Value Display digunakan untuk menampilkan nilai suatu tagname di
layar, dengan keterangan :
1. Discrete: untuk objek tipe diskrit (0 atau 1)
2. Analog: untuk objek tipe analog (berupa range)
3. String: untuk objek berupa huruf (misal: nama operator)
4. User Input
Dengan InTouch juga dapat dibuat suatu fitur user input, dimana pengguna dapat
memasukkan input pada program untuk melakukan suatu aksi tertentu pada plant. Berikut
ini fitur-fitur yang berguna.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
Pada kelompok fitur Touch Links terdapat fitur User Input yang terdiri dari :
1. Discrete: untuk inputan bilangan diskrit
2. Analog: untuk inputan bilangan analog (misal: penentuan kecepatan, posisi, suhu yang
diinginkan)
3. String: untuk inputan huruf (misal: untuk pembuatan fasilitas password)
User Input-Discrete berguna untuk memberikan input nilai diskrit tertentu (0 atau 1)
dari Tagname atau hasil yang terdapat pada expression. Sedangkan Msg to user, Set
Prompt, Reset Prompt berguna untuk mengatur tampilan window yang muncul saat area
diskrit ditekan.
Slider-Horizontal berguna untuk memberikan nilai analog dengan menggeser slider
kea rah horizontal, berikut isian-isian yang harus diberikan :
1. At left dan At right berisi minimal dan maksimal pada objek
2. Jarak pergeseran dapat diatur dengan mengubah nilai pada To left dan To right
3. Reference location menunjukkan lokasi awal sebelum slider digeser
Touch Pushbutton-Discrete Value biasanya digunakan dalam penekanan tombol.
Saat tombol ditekan, hasilnya bisa nyala atau mati berdasarkan Action :
1. Direct: memberi kondisi on sesaat (push-on)
2. Reserve: memberi kondisi off sesaat (push-off)
3. Toggle: memberi kondisi on-off bergantian jika tombol ditekan lebih dari satu kali
4. Set: memberi kondisi on terus menerus
5. Reset: memberi kondisi off terus menerus
2.6. Wonderware MODBUS Ethernet I/O Server (MBENET) [23]
MBENET adalah program aplikasi Microsoft Windows yang memungkinkan akses
data di PLC Modicon melalui jaringan Ethernet. Server hanya memerlukan kartu
jaringan Ethernet 10BaseT standar untuk mengakses jaringan Ethernet. Protokol
komunikasi menangani elemen data dalam percakapan yang menggunakan konvensi
penamaan tiga bagian yang mencakup nama aplikasi (application name), nama topic
(Topic Name), dan nama item (Item Name).
Application Name Merupakan nama program Windows (server) yang akan
mengakses elemen data. Dalam kasus data yang datang dari atau pergi ke peralatan
Modicon melalui server ini, bagian aplikasi dari alamat adalah MBENET.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

25
Topic Name merupakan Nama yang berarti dikonfigurasi di server untuk
mengidentifikasi perangkat tertentu. Nama-nama ini kemudian digunakan sebagai nama
topik dalam semua percakapan ke perangkat itu. Misalnya, PLC209.
Item Name merupakan elemen data spesifik dalam topik yang ditentukan. Server
mendukung nama item / point yang konsisten dengan konvensi penamaan point yang
digunakan oleh PLC Modicon. Server memungkinkan pengguna memilih Slave Type saat
pengguna mengkonfigurasi definisi topik untuk PLC. Gambar 2.20 berisi rentang Alamat
PLC yang didukung oleh MBENET.
Gambar 2.20. Tipe PLC dan rentang alamat yang didukung MBENET [24]
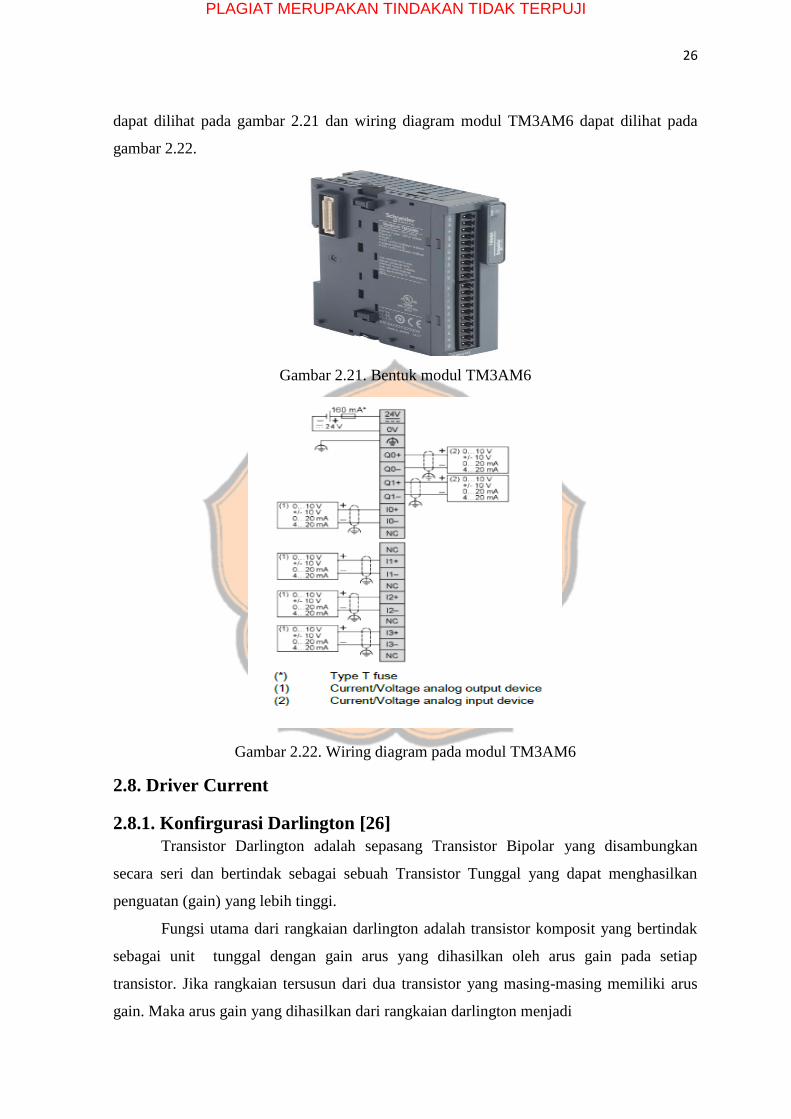
2.7. TM3AM6 [25]
Modul TM3AM6 salah satu modul tambahan yang kompatibel pada PLC
TM221CE40R. Modul ini bekerja pada tegangan 24V yang berfungsi untuk menambahkan
input dan output pada PLC. TM3AM6 memiliki empat input analog dan 2 output analog,
untuk alamat pada input analog %IW1.0 dan pada output analog QW1.0. Modul TM3AM6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
26
dapat dilihat pada gambar 2.21 dan wiring diagram modul TM3AM6 dapat dilihat pada
gambar 2.22.
Gambar 2.21. Bentuk modul TM3AM6
Gambar 2.22. Wiring diagram pada modul TM3AM6
2.8. Driver Current
2.8.1. Konfirgurasi Darlington [26]
Transistor Darlington adalah sepasang Transistor Bipolar yang disambungkan
secara seri dan bertindak sebagai sebuah Transistor Tunggal yang dapat menghasilkan
penguatan (gain) yang lebih tinggi.
Fungsi utama dari rangkaian darlington adalah transistor komposit yang bertindak
sebagai unit tunggal dengan gain arus yang dihasilkan oleh arus gain pada setiap
transistor. Jika rangkaian tersusun dari dua transistor yang masing-masing memiliki arus
gain. Maka arus gain yang dihasilkan dari rangkaian darlington menjadi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
27
βD = β1 X β2 (2.2)
Jika dua transistor terhubung maka β1 = β2 = β, rangkaian darlington menghasilkan arus
gain
βD = β ² (2.3)
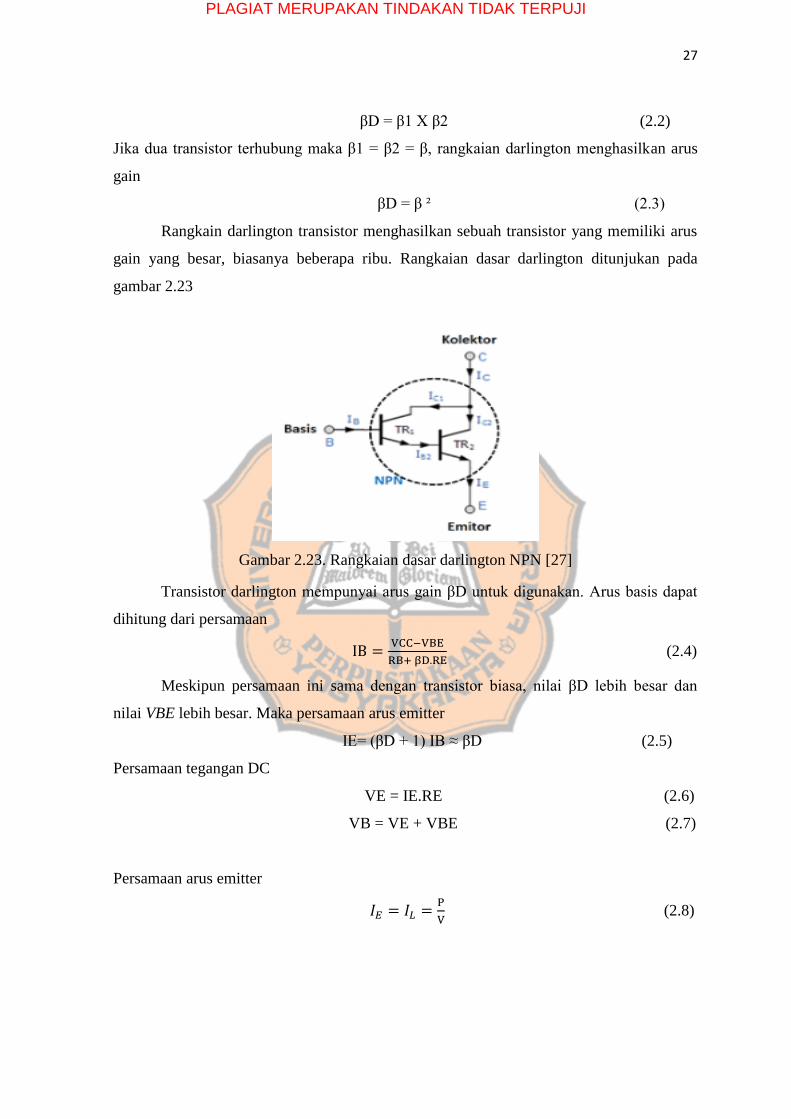
Rangkain darlington transistor menghasilkan sebuah transistor yang memiliki arus
gain yang besar, biasanya beberapa ribu. Rangkaian dasar darlington ditunjukan pada
gambar 2.23
Gambar 2.23. Rangkaian dasar darlington NPN [27]
Transistor darlington mempunyai arus gain βD untuk digunakan. Arus basis dapat
dihitung dari persamaan
(2.4)
Meskipun persamaan ini sama dengan transistor biasa, nilai βD lebih besar dan
nilai VBE lebih besar. Maka persamaan arus emitter
IE= (βD + 1) IB ≈ βD (2.5)
Persamaan tegangan DC
VE = IE.RE (2.6)
VB = VE + VBE (2.7)
Persamaan arus emitter
(2.8)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
28
BAB III
PERANCANGAN PENELITIAN
Bab ini menjelaskan perancangan keseluruhan dari penelitian yang berjudul
“SCADA sebuah Smarthome untuk pengendali lampu, pengendali pintu pagar rumah, dan
pengendali gorden berbasis PLC Schneider M221” yang tediri dari perancangan perangkat
keras, perangkat lunak, perancangan PLC, dan diagram alir. Perancangan ini menjelaskan
tentang Smarthome yang mengendalikan lampu, pengendali pintu pagar rumah, dan
pengendali gorden dengan software wonderware intouch sebagai HMI. Pada pengendali
lampu menggunakan sensor UV sebagai input dan menggunakan lampu DC 12V sebagai
output. Output dari pengendali lampu ini menyala pada kecerahan 0% sampai 100% yang
terbagi menjadi lima level. Output ini akan menyala pada level tertentu tergantung pada
kecerahan berapa sensor mendeteksi. Pengendali pintu pagar menggunakan sensor PIR
sebagai input dan menggunakan motor DC sebagai output. Sensor ini mendeteksi
pergerakan, apabila sensor ini mendeteksi maka motor DC akan bergerak kearah CW
sehingga pintu pagar membuka dan sebaliknya apabila sensor tidak mendeteksi maka
motor DC berputar kearah CCW sehingga pintu akan menutup. Motor akan berhenti
apabila salah satu limit switch tertekan oleh pintu pagar. Pengendali gorden menggunakan
sensor LDR sebagai input dan motor DC sebagai output. Output dari pengendali gorden ini
memiliki 3 level kondisi (buka penuh, buka ½, dan tutup penuh). Output ini akan bekerja
pada level tertentu tergantung pada level berapa sensor mendeteksi. Motor DC akan
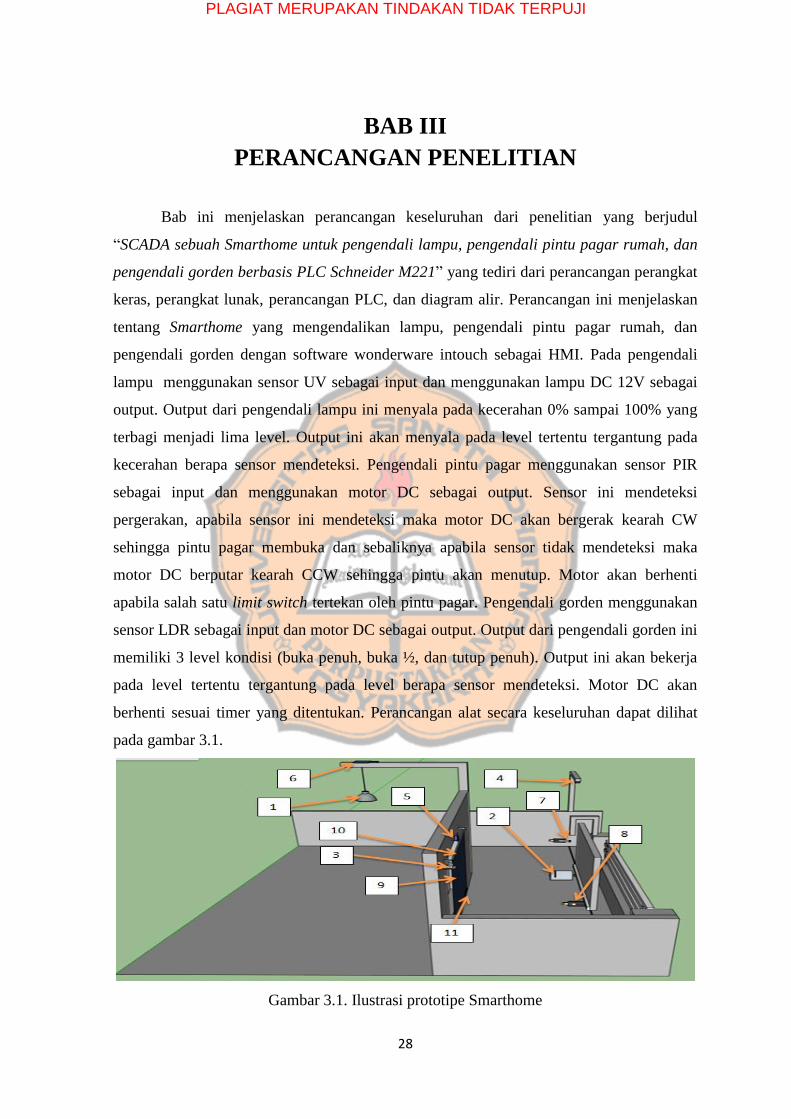
berhenti sesuai timer yang ditentukan. Perancangan alat secara keseluruhan dapat dilihat
pada gambar 3.1.
Gambar 3.1. Ilustrasi prototipe Smarthome
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
Berikut penjelasan dan keterangan bagian-bagian dari prototipe Smarthome yang
dapat dilihat di tabel 3.1.
Tabel 3.1. Keterangan dan fungsi dari gambar 3.1
NO Keterangan Fungsi
1 Lampu DC Sebagai output pengendali lampu
2 Motor DC 1 Sebagai penggerak pintu pagar
3 Motor DC 2 Sebagai penggerak gorden
4 Sensor IR motion HC-SR501 Sebagai input pengendali pintu pagar
5 Sensor LDR Sebagai input pengendali gorden
6 Sensor Ultraviolet Sebagai input pengendali lampu
7 Limit switch 1 Sebagai pembatas pintu pagar saat tutup
8 Limit switch 2 Sebagai pembatas pintu pagar saat buka
9 Kain Sebagai kain gorden
10 Penggulung kain gorden Sebagai penggulung kain gorden
11 Pemberat kain gorden Sebagai pemberat kain agar mudah
dalam proses penggulungan
Keluaran terdiri dari lampu dan motor DC dan limit switch sebagai penghenti
jalanya pada motor. Sistem ini bisa dimonitoring melalui software wonderware intouch
sebagai HMI (SCADA).
3.1. Blok diagram
Blok diagram ini penjelasan yang lebih kongkrit dari gambar 1.1. Gambar 3.2
merupakan blok diagram dari “SCADA sebuah smarthome untuk pengendali lampu,
pengendali pintu pagar rumah, dan pengendali gorden berbasis PLC Schneider M221”
yang terdiri dari PLC M221 sebagai pengendali, sensor UV, sensor PIR, sensor LDR, limit
switch, dan push button sebagai masukan serta HMI sebagai interface. Motor DC dan
Lampu DC sebagai keluaran, relay berfungsi sebagai pelindung output apabila terjadi
tegangan yang berlebih dan sebagai pembalik arah putaran motor. PLC berfungsi untuk
mengolah data yang didapat dari sensor untuk mengendalikan output sehingga
menyebabkan tampilan animasi HMI sama dengan proses yang terjadi secara real. Proses
komunikasi dari PLC ke HMI menggunakan MBENET yang merupakan program aplikasi
Microsoft Windows yang memungkinkan akses data di PLC Modicon cmelalui jaringan
Ethernet. Pada jaringan ini menggunakan kabel UTP dan konektor RJ45. Komunikasi ini
mempunyai fungsi sebagai untuk menampilkan animasi-animasi secara realtime di
tampilan HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

30
Gambar 3.2. Blok diagram prototipe SCADA untuk pengendali lampu, pengendali pintu
pagar rumah, dan pengendali gorden.
Prototipe ini mengendalikan lampu, pintu pagar, dan gorden prototipe ini bekerja
apabila sensor dari masing-masing pengendali mendeteksi. Selain itu terdapat push button
sebagai tombol start dan stop untuk menjalankan atau menghentikan sistem.
3.2. Perancangan perangkat keras mekanis
Perancangan perangkat keras mekanis berisi cara kerja dan bagian komponen dari
pengendali pintu pagar rumah dan pengendali gorden.
3.2.1. Cara kerja dan bagian komponen pengendali pintu pagar
Mekanisme dari pengendali pintu pagar rumah dapat dilihat pada 3.3. Pengendali
ini mengendalikan pintu gerbang agar bisa terbuka dan tertutup secara otomatis yang
digerakkan oleh motor DC dan limit switch sebagai penghenti motor DC. Pada bagian
bawah pintu pagar terdapat dua roda berikut reel yang berguna untuk mempermudah
motor DC membuka dan menutup dan bergerak sesuai pada reel yang dibuatkan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
31
Gambar 3.3. Mekanisme Pintu Pagar
3.2.2. Cara kerja dan bagian komponen pengendali gorden
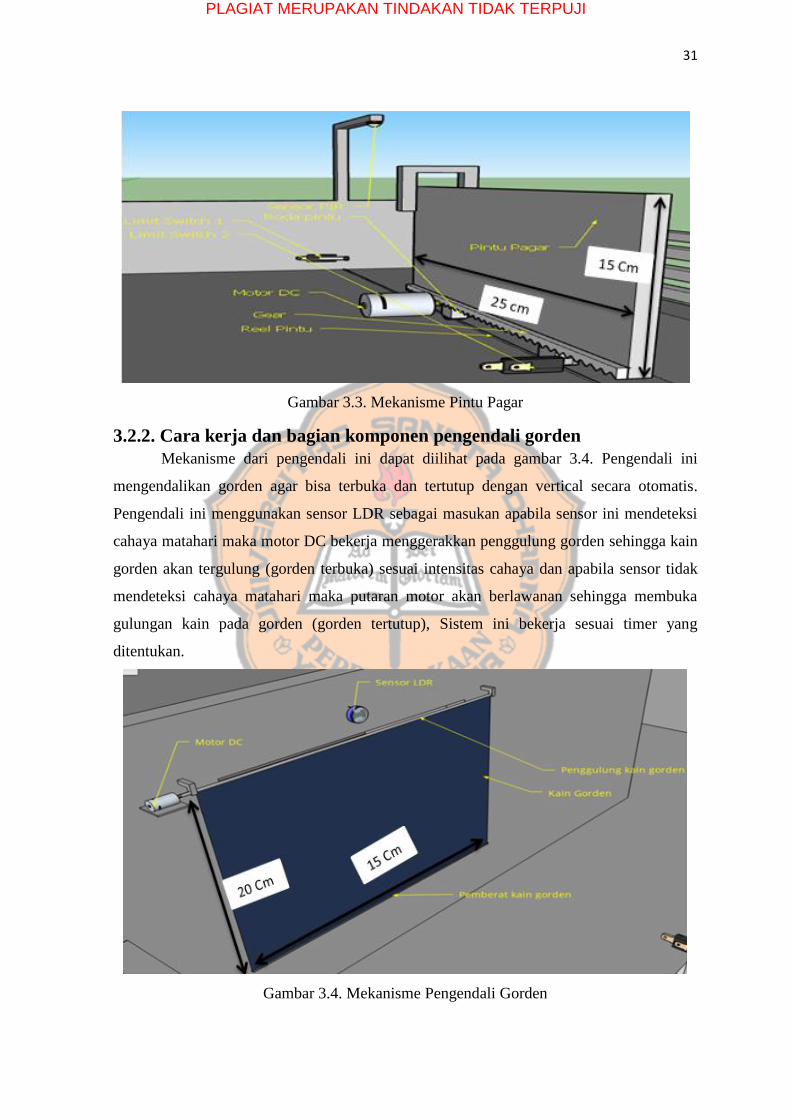
Mekanisme dari pengendali ini dapat diilihat pada gambar 3.4. Pengendali ini
mengendalikan gorden agar bisa terbuka dan tertutup dengan vertical secara otomatis.
Pengendali ini menggunakan sensor LDR sebagai masukan apabila sensor ini mendeteksi
cahaya matahari maka motor DC bekerja menggerakkan penggulung gorden sehingga kain
gorden akan tergulung (gorden terbuka) sesuai intensitas cahaya dan apabila sensor tidak
mendeteksi cahaya matahari maka putaran motor akan berlawanan sehingga membuka
gulungan kain pada gorden (gorden tertutup), Sistem ini bekerja sesuai timer yang
ditentukan.
Gambar 3.4. Mekanisme Pengendali Gorden
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
3.3. Perancangan perangkat keras elektronis
3.3.1. Sensor LDR
Pada pengendali gorden mengggunakan sensor LDR sebagai input. Sensor LDR
bekerja pada tegangan 5V. Pada input pengendali gorden ditambahkan rangkaian pembagi
tegangan yang berfungsi untuk membagi tegangan input menjadi tiga tegangan output.
Nilai resistensi sensor LDR didapatkan pada saat percobaan, pada saat terang mendapatkan
nilai resistensi sebesar 10,30 Kohm, pada saat redup mendapatkan nilai resistensi sebesar
0,46Mohm, dan pada saat gelap mendapatkan nilai resistensi 6,14Mohm dan nilai R2
ditentukan sebesar 1Mohm. Rangkaian pembagi tegangan dapat dilihat pada gambar 3.5
Gambar 3.5. Perancangan elektronis sensor LDR
Bedasarkan rumus 2.1 dapat dicari tegangan output yang dibutuhkan pada saat
gorden buka penuh, gorden tutup setengah, dan gorden tutup penuh sebagai berikut:
(saat terang)
(saat redup)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

33
(saat gelap)
Dari perhitungan di atas diketahui Tegangan output yang dibutuhkan pada saat
gorden terbuka penuh 4,9V dan terbaca di ladder 490 (Des), pada saat gorden tutup
setengah tegangan dibutuhkan 3,4V dan terbaca di ladder 340 (Des), dan pada saat gorden
tutup penuh tegangan yang dibutuhkan 0.7V dan terbaca di ladder 70 (Des). Karakteristik
dapat dilihat pada gambar 3.6 dengan persamaan y = 100(x).
Gambar 3.6. Karakteristik input analog sensor LDR
3.3.2. Sensor Ultraviolet
Pada pengendali lampu mengggunakan sensor UV sebagai input. Sensor UV
bekerja pada tegangan 5V dengan maksimal tegangan keluaran 1V. yang perancangan
elektronis sensor UV dapat dilihat pada gambar 3.7.
Gambar 3.7. Perancangan elektronis sensor UV
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
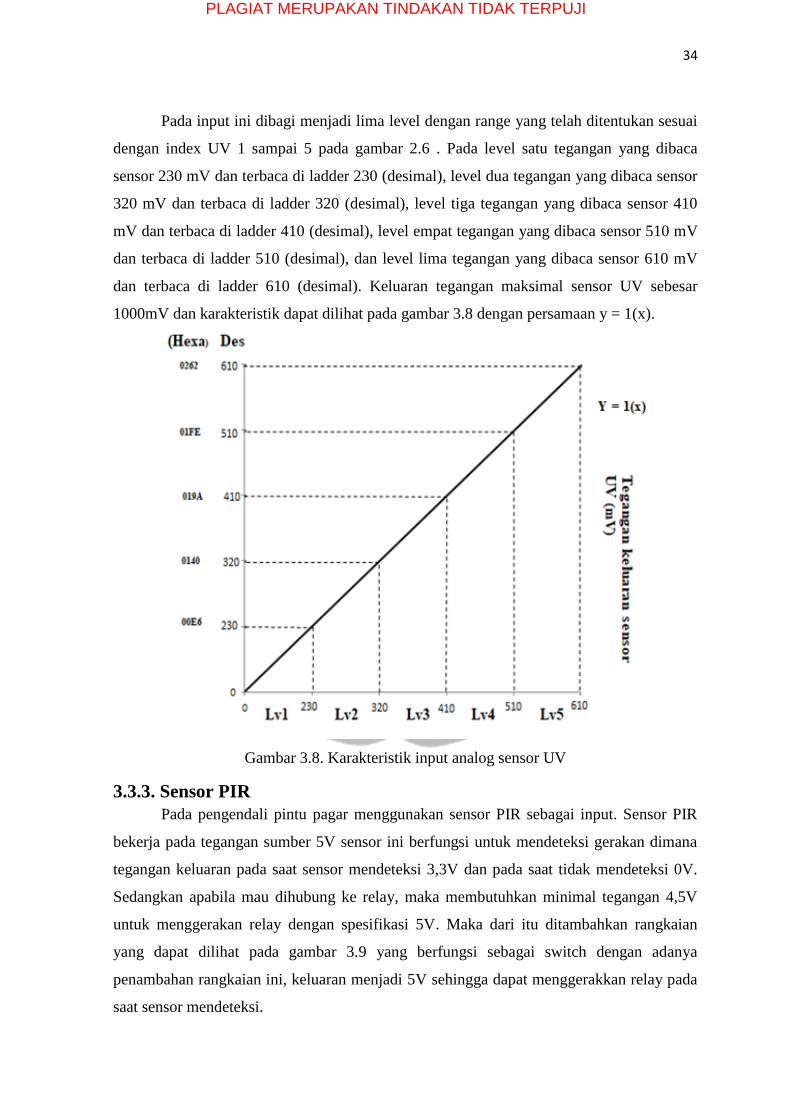
34
Pada input ini dibagi menjadi lima level dengan range yang telah ditentukan sesuai
dengan index UV 1 sampai 5 pada gambar 2.6 . Pada level satu tegangan yang dibaca
sensor 230 mV dan terbaca di ladder 230 (desimal), level dua tegangan yang dibaca sensor
320 mV dan terbaca di ladder 320 (desimal), level tiga tegangan yang dibaca sensor 410
mV dan terbaca di ladder 410 (desimal), level empat tegangan yang dibaca sensor 510 mV
dan terbaca di ladder 510 (desimal), dan level lima tegangan yang dibaca sensor 610 mV
dan terbaca di ladder 610 (desimal). Keluaran tegangan maksimal sensor UV sebesar
1000mV dan karakteristik dapat dilihat pada gambar 3.8 dengan persamaan y = 1(x).
Gambar 3.8. Karakteristik input analog sensor UV
3.3.3. Sensor PIR
Pada pengendali pintu pagar menggunakan sensor PIR sebagai input. Sensor PIR
bekerja pada tegangan sumber 5V sensor ini berfungsi untuk mendeteksi gerakan dimana
tegangan keluaran pada saat sensor mendeteksi 3,3V dan pada saat tidak mendeteksi 0V.
Sedangkan apabila mau dihubung ke relay, maka membutuhkan minimal tegangan 4,5V
untuk menggerakan relay dengan spesifikasi 5V. Maka dari itu ditambahkan rangkaian
yang dapat dilihat pada gambar 3.9 yang berfungsi sebagai switch dengan adanya
penambahan rangkaian ini, keluaran menjadi 5V sehingga dapat menggerakkan relay pada
saat sensor mendeteksi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
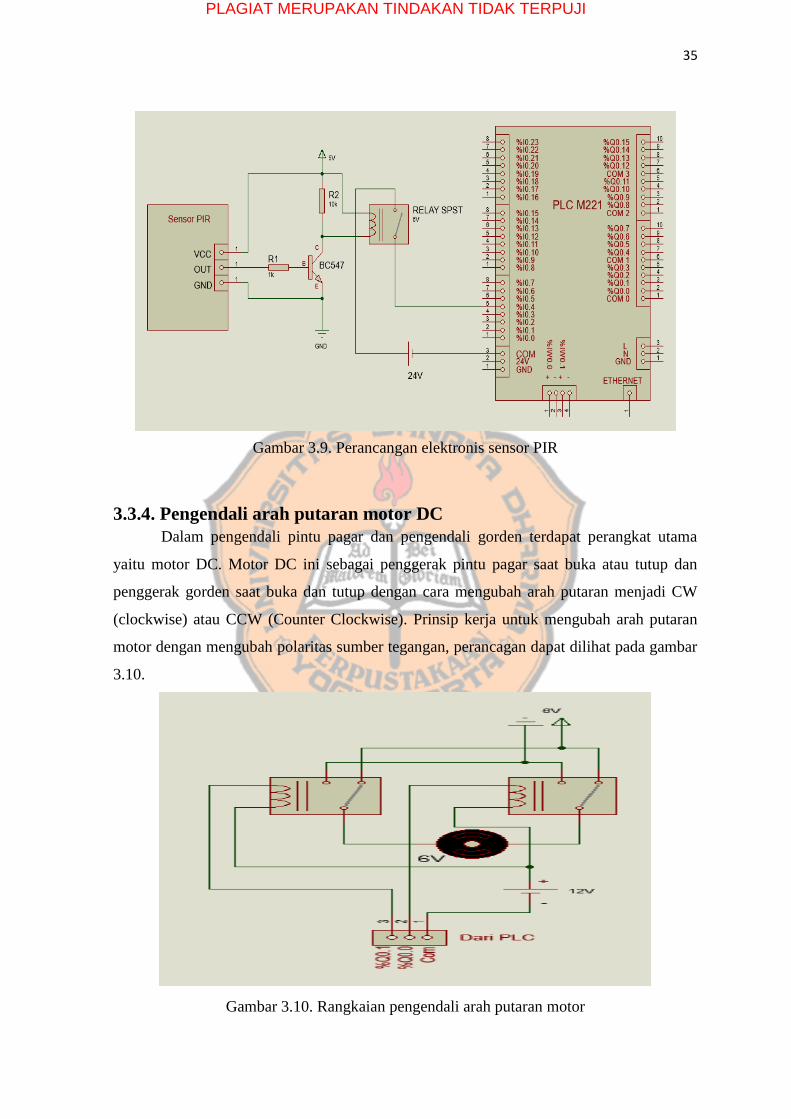
35
Gambar 3.9. Perancangan elektronis sensor PIR
3.3.4. Pengendali arah putaran motor DC
Dalam pengendali pintu pagar dan pengendali gorden terdapat perangkat utama
yaitu motor DC. Motor DC ini sebagai penggerak pintu pagar saat buka atau tutup dan
penggerak gorden saat buka dan tutup dengan cara mengubah arah putaran menjadi CW
(clockwise) atau CCW (Counter Clockwise). Prinsip kerja untuk mengubah arah putaran
motor dengan mengubah polaritas sumber tegangan, perancagan dapat dilihat pada gambar
3.10.
Gambar 3.10. Rangkaian pengendali arah putaran motor
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
3.3.5. Lampu DC
Pada output pengendali lampu menggunakan modul TM3AM6 dan output lampu
DC. Modul TM3AM6 memiliki 4 input analog dan 2 output analog, dalam pengendali
lampu menggunakan satu output analog dengan keluaran arus 4ma sampai 20mA, maka
dari itu diperlukan rangkaian driver current untuk menghidupkan lampu 12v 3W.
Rangkaian driver current (penaik arus) dapat dilihat pada gambar 3.11.
Gambar 3.11. Rangkaian driver current
Pada rangkaian Driver Current terdapat beberapa komponen yang digunakan, untuk
menentukan nilai dari komponen tersebut diperlukan perhitungan. Nilai dari tiap
komponen atau tipe komponen yang digunakan mempengaruhi nilai keluaran dari
rangkaian driver current. Bedasarkan persamaan 2.7 digunakan untuk mengetahui tegangan
keluaran setelah melewati rangkaian darlington berikut:
VE (T1) = VB – VBE
= 10V – 0,7V
= 9,3V (tegangan di basic transistor 2)
VE (T2) = VB – VBE
= 9,3V – 0,7V
= 8,6V
Bedasarkan Persamaan 2.8 yang digunakan untuk mengetahui arus beban pada
lampu ( sebagai berikut:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

37
Tetapi arus yang dari sumber TM3AM6 minimal 4mA sampai 20mA sehingga β
yang dibutuhkan sebagai berikut :
Untuk memenuhi arus beban sebesar 0,25 digunakan transistor BD139. Namun
nilai β pada transistor BD139 sebesar 25 masih lebih kecil dari β yang dibutuhkan,
sehingga digunakan konfirgurasi darlington dengan menggunakan komponen transistor
2n2222 dengan β = 30 dan transistor BD139. Dengan persamaan 2.2 β darlington menjadi
sebagai berikut :
βtotal = β1 x β2
= 30 x 25
= 750
Nilai beta dari konfirgurasi darlinton sudah memenuhi dari β yang dibutuhkan.
Gambar 3.12. Karakteristik output analog PLC
Karakteristik dapat dilihat pada gambar 3.12 dengan persamaan y = 0,01(x). Output
ini memiliki lima kondisi output yang berbeda-beda dengan maksimal tegangan 10V. Pada
kondisi pertama output pada ladder bernilai 0 (Des) sehingga tegangan yang keluar 0V,
kondisi kedua output pada ladder bernilai 250 (Des) sehingga tegangan keluar 2,5V,
kondisi ketiga output pada ladder bernilai 500 (Des) sehingga tegangan keluar 5V, kondisi
keempat output pada ladder bernilai 750 (Des) sehingga tegangan keluar 7,5V, kondisi
kelima output pada ladder bernilai 1000 (Des) sehingga tegangan keluar 10V. Tingkat
kecerahan yang berbeda dari level 1 sampai 5 ditandai oleh gradasi warna lampu menyala
pada level tertentu di tampilan HMI. Tingkat kecerahan lampu dapat dilihat pada tabel 3.2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
Tabel 3.2. Tingkat kecerahan lampu
No Level ADC
(Des)
ADC
(Hexa)
Vout Lampu
(menyala)
Warna
(HMI)
1 1 0 16#0000 0V 0% 2 2 250 16#00FA 2,5V 25% 3 3 500 16#01F4 5V 50%
4 4 750 16#02EE 7,5V 75%
5 5 1000 16#03E8 10V 100%
3.4. Perancangan PLC
Pada sistem Smarthome ini menggunakan PLC Schneider M221 sebagai pengontrol
Pada setiap perancangan sangat dibutuhkan berupa masukan, keluaran, ataupun memori
yang digunakan. PLC ini memiliki 40 port I/O terdiri dari 24 port input digital dan output
digital 16 port. Port input digital dapat dilihat pada tabel 3.3, port input analog dapat dilihat
pada tabel 3.4, port output digital dapat dilihat pada tabel 3.5. dan port output analog dapat
dilihat pada tabel 3.6.
Tabel 3.3. Pembagian input digital pada PLC
NO Input Alamat Keterangan
1 Push Button 1 %I0.0 Sebagai tombol start
2 Push Button 2 %I0.1 Sebagai tombot stop
3 Limit switch 1 %I0.2 Sebagai pembatas putaran motor saat
kondisi pintu pagar tutup
4 Limit switch 2 %I0.3 Sebagai pembatas putaran motor saat
kondisi pintu pagar buka
5 Sensor PIR %I0.4 Sebagai input pengendali pintu pagar
Tabel 3.4. Pembagian input analog pada PLC
NO Input Alamat Keterangan
1 Sensor LDR %IW0.0 Sebagai input pengendali gorden
2 Sensor UV %IW0.1 Sebagai input pengendali lampu
Tabel 3.5. Pembagian output digital pada PLC
NO Output Alamat Keterangan
1 Motor DC 1
(Pintu pagar)
%Q0.0
%Q0.1
Clockwise (CW)
Counter Clockwise (CCW)
2 Motor DC 2
(Gorden)
%Q0.2
%Q0.3
Clockwise (CW)
Counter Clockwise (CCW)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
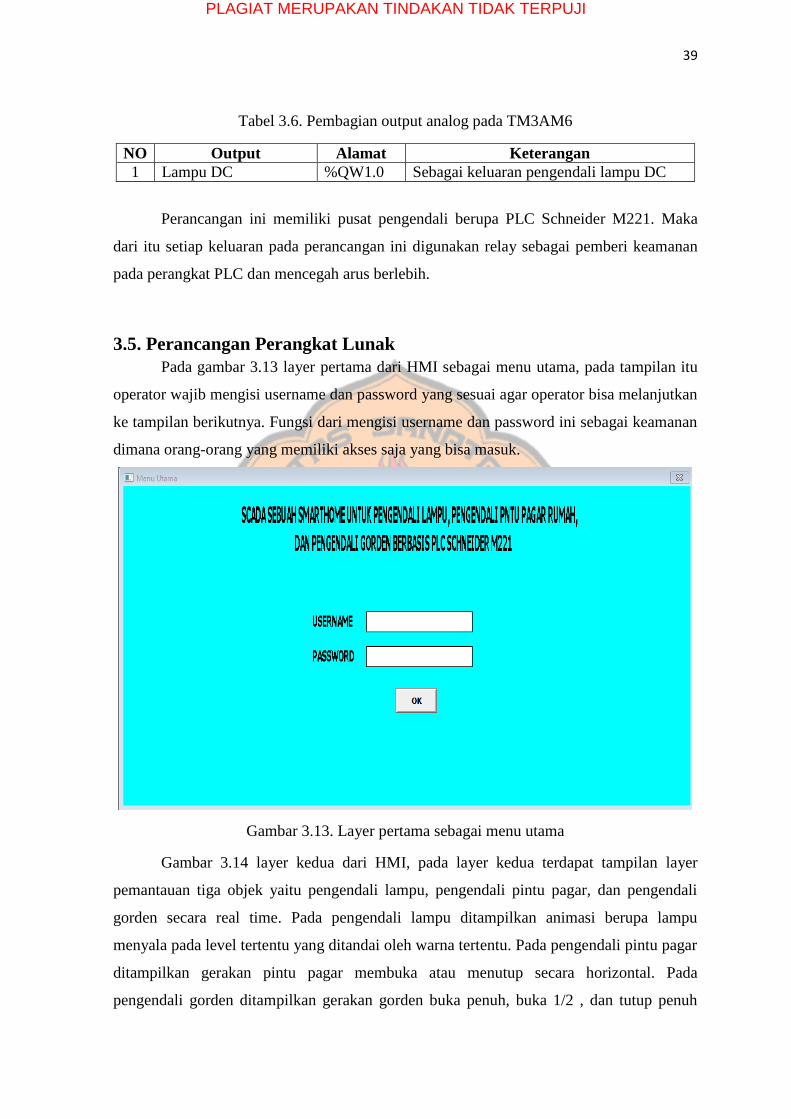
39
Tabel 3.6. Pembagian output analog pada TM3AM6
NO Output Alamat Keterangan
1 Lampu DC %QW1.0 Sebagai keluaran pengendali lampu DC
Perancangan ini memiliki pusat pengendali berupa PLC Schneider M221. Maka
dari itu setiap keluaran pada perancangan ini digunakan relay sebagai pemberi keamanan
pada perangkat PLC dan mencegah arus berlebih.
3.5. Perancangan Perangkat Lunak
Pada gambar 3.13 layer pertama dari HMI sebagai menu utama, pada tampilan itu
operator wajib mengisi username dan password yang sesuai agar operator bisa melanjutkan
ke tampilan berikutnya. Fungsi dari mengisi username dan password ini sebagai keamanan
dimana orang-orang yang memiliki akses saja yang bisa masuk.
Gambar 3.13. Layer pertama sebagai menu utama
Gambar 3.14 layer kedua dari HMI, pada layer kedua terdapat tampilan layer
pemantauan tiga objek yaitu pengendali lampu, pengendali pintu pagar, dan pengendali
gorden secara real time. Pada pengendali lampu ditampilkan animasi berupa lampu
menyala pada level tertentu yang ditandai oleh warna tertentu. Pada pengendali pintu pagar
ditampilkan gerakan pintu pagar membuka atau menutup secara horizontal. Pada
pengendali gorden ditampilkan gerakan gorden buka penuh, buka 1/2 , dan tutup penuh
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

40
secara vertical dan Terdapat menu start dan stop sistem berikut tombol kembali ke menu
utama.
Gambar 3.14. Layer kedua tampilan animasi dari 3 objek
Pada tabel 3.7 pembagian memori masing-masing kondisi yang bergantung pada
apa yang di tampilkan pada HMI.
Tabel 3.7. Pembagian memori pada PLC
NO Masukkan Memori Alamat
1 Lampu %MW0
2 Buka/Tutup Pintu Pagar %MW2
3 Buka penuh, Buka ½, Tutup penuh Gorden %MW1
4 Tombol Start %M0
5 Tombol Stop %M1
3.6. Perancangan Diagram Alir SCADA
Pada gambar 3.15 program SCADA dirancang terdapat empat bagian utama yaitu
proses login, proses pengendali lampu, proses pengendali pintu pagar, dan proses
pengendali gorden. Pada proses login yang terdapat pada menu utama admin harus
memasukkan password agar bisa melanjutkan kehalaman berikutnya pada halaman
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
berikutnya terdapat tampilan animasi untuk pengendali lampu, pengendali pintu pagar, dan
pengendali gorden.
Gambar 3.15. Diagram alir SCADA secara umum
3.6.1. Proses login
Pada menu utama terdapat proses login. Pada proses login admin harus memasuki
password dengan kata “sanjaya” dan username berupa “155114046”. User menekan
tombol “OK” untuk melanjutkan kehalaman berikutnya apabila user salah mengisi
username atau password maka user kembali mengisi password dan username sampai tepat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
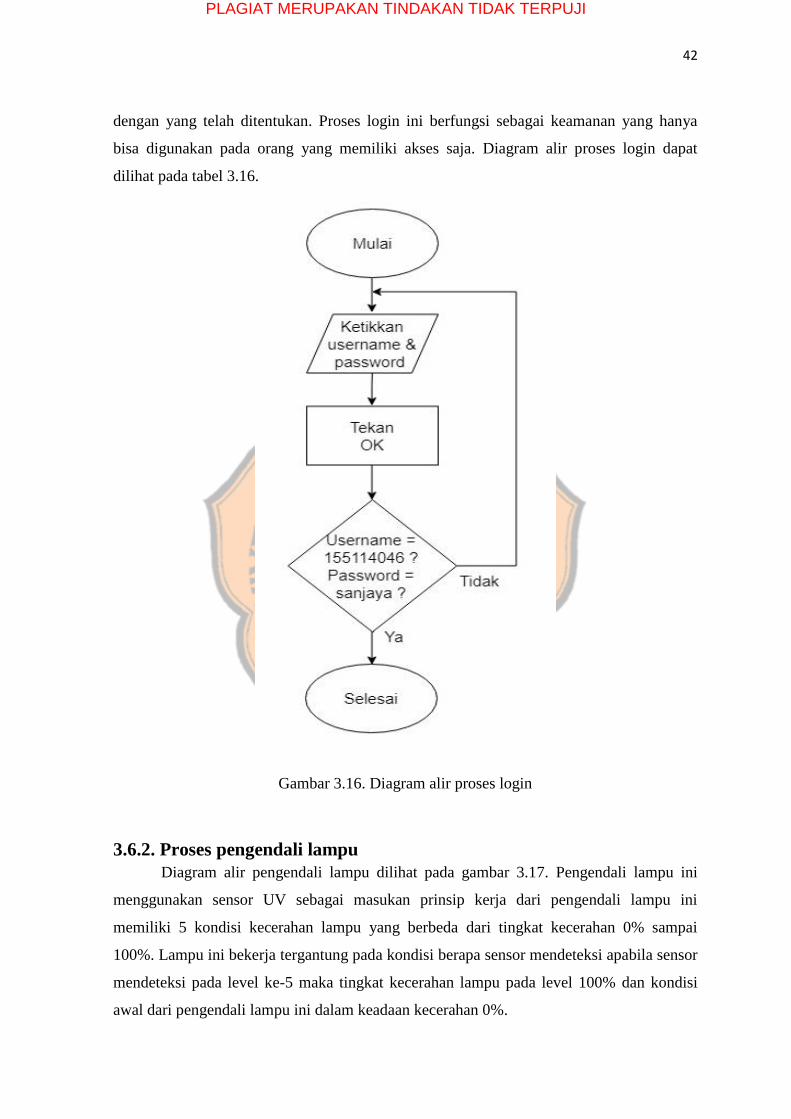
42
dengan yang telah ditentukan. Proses login ini berfungsi sebagai keamanan yang hanya
bisa digunakan pada orang yang memiliki akses saja. Diagram alir proses login dapat
dilihat pada tabel 3.16.
Gambar 3.16. Diagram alir proses login
3.6.2. Proses pengendali lampu
Diagram alir pengendali lampu dilihat pada gambar 3.17. Pengendali lampu ini
menggunakan sensor UV sebagai masukan prinsip kerja dari pengendali lampu ini
memiliki 5 kondisi kecerahan lampu yang berbeda dari tingkat kecerahan 0% sampai
100%. Lampu ini bekerja tergantung pada kondisi berapa sensor mendeteksi apabila sensor
mendeteksi pada level ke-5 maka tingkat kecerahan lampu pada level 100% dan kondisi
awal dari pengendali lampu ini dalam keadaan kecerahan 0%.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
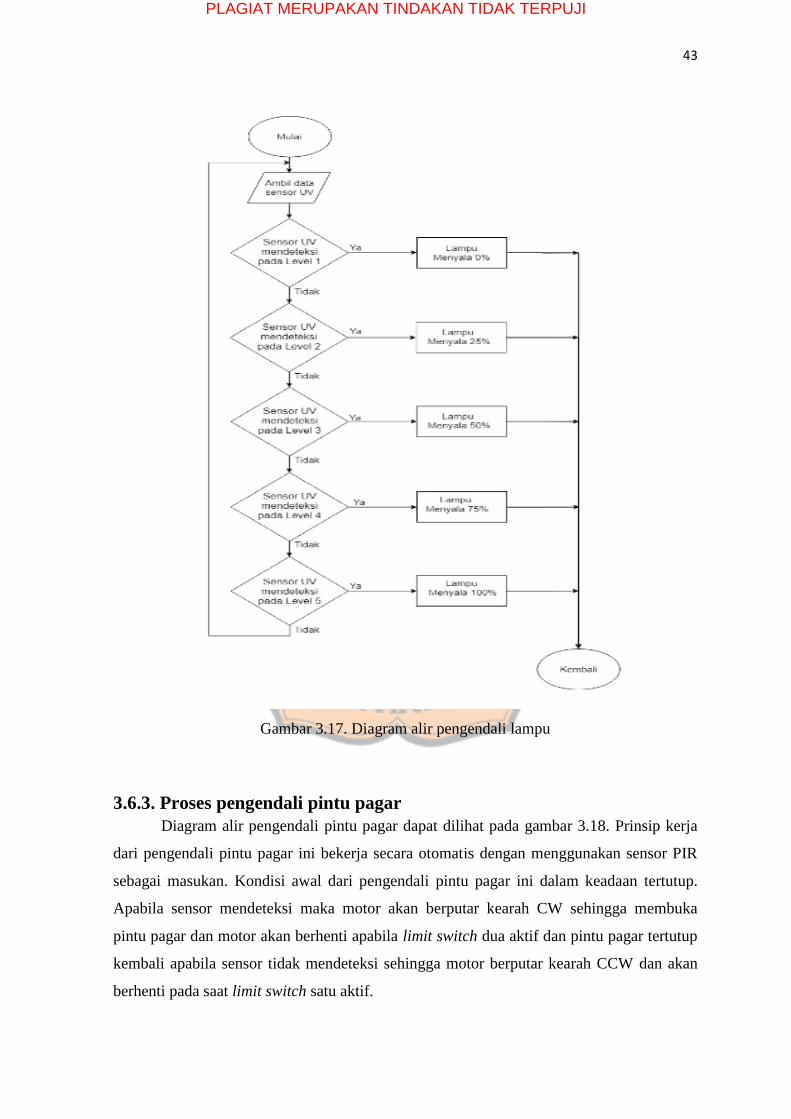
43
Gambar 3.17. Diagram alir pengendali lampu
3.6.3. Proses pengendali pintu pagar
Diagram alir pengendali pintu pagar dapat dilihat pada gambar 3.18. Prinsip kerja
dari pengendali pintu pagar ini bekerja secara otomatis dengan menggunakan sensor PIR
sebagai masukan. Kondisi awal dari pengendali pintu pagar ini dalam keadaan tertutup.
Apabila sensor mendeteksi maka motor akan berputar kearah CW sehingga membuka
pintu pagar dan motor akan berhenti apabila limit switch dua aktif dan pintu pagar tertutup
kembali apabila sensor tidak mendeteksi sehingga motor berputar kearah CCW dan akan
berhenti pada saat limit switch satu aktif.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
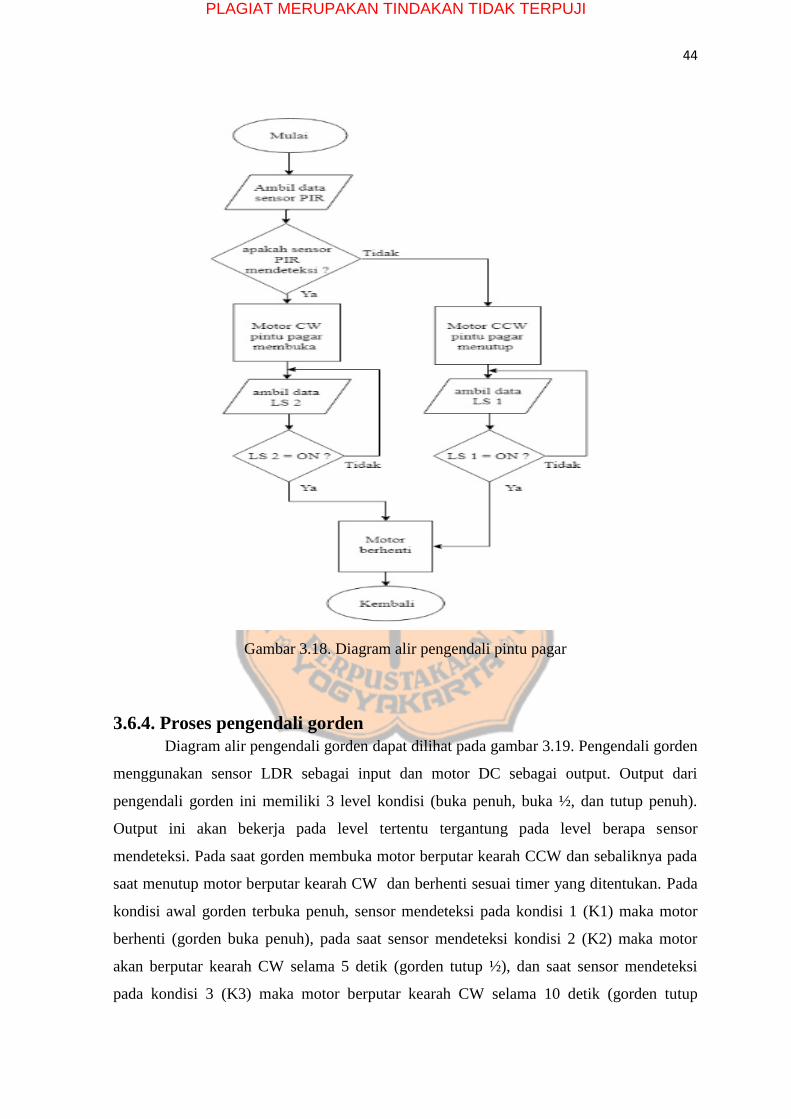
44
Gambar 3.18. Diagram alir pengendali pintu pagar
3.6.4. Proses pengendali gorden
Diagram alir pengendali gorden dapat dilihat pada gambar 3.19. Pengendali gorden
menggunakan sensor LDR sebagai input dan motor DC sebagai output. Output dari
pengendali gorden ini memiliki 3 level kondisi (buka penuh, buka ½, dan tutup penuh).
Output ini akan bekerja pada level tertentu tergantung pada level berapa sensor
mendeteksi. Pada saat gorden membuka motor berputar kearah CCW dan sebaliknya pada
saat menutup motor berputar kearah CW dan berhenti sesuai timer yang ditentukan. Pada
kondisi awal gorden terbuka penuh, sensor mendeteksi pada kondisi 1 (K1) maka motor
berhenti (gorden buka penuh), pada saat sensor mendeteksi kondisi 2 (K2) maka motor
akan berputar kearah CW selama 5 detik (gorden tutup ½), dan saat sensor mendeteksi
pada kondisi 3 (K3) maka motor berputar kearah CW selama 10 detik (gorden tutup
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
penuh). Kondisi awal gorden tutup ½, sensor mendeteksi pada kondisi 2 (K2) maka motor
akan berhenti (gorden tutup ½), pada saat sensor mendeteksi pada kondisi 1 (K1) maka
motor berputar ke arah CCW selama 5 detik (gorden buka penuh), dan saat sensor
mendeteksi pada kondisi 3 (K3) maka motor berputar kearah CW selama 5 detik (gorden
tutup penuh). Kondisi awal gorden tutup penuh, sensor mendeteksi pada kondisi 3 (K3)
maka motor akan berhenti (gorden tutup penuh), pada saat sensor mendeteksi pada kondisi
2 (K2) maka motor akan berputar kearah CCW selama 5 detik (gorden tutup ½), dan saat
sensor mendeteksi pada kondisi 1 (K1) maka motor akan berputar kearah CCW selama 10
detik (gorden buka penuh).
Gambar 3.19. Diagram alir pengendali Gorden
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
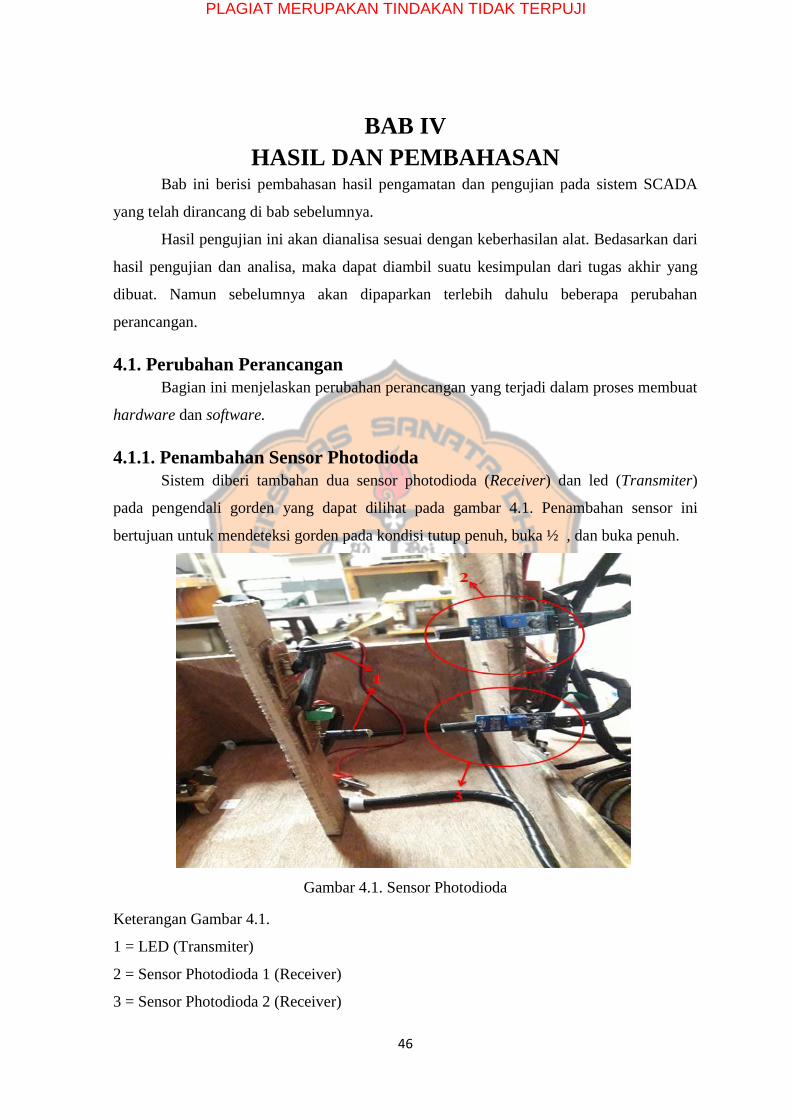
46
BAB IV
HASIL DAN PEMBAHASAN Bab ini berisi pembahasan hasil pengamatan dan pengujian pada sistem SCADA
yang telah dirancang di bab sebelumnya.
Hasil pengujian ini akan dianalisa sesuai dengan keberhasilan alat. Bedasarkan dari
hasil pengujian dan analisa, maka dapat diambil suatu kesimpulan dari tugas akhir yang
dibuat. Namun sebelumnya akan dipaparkan terlebih dahulu beberapa perubahan
perancangan.
4.1. Perubahan Perancangan
Bagian ini menjelaskan perubahan perancangan yang terjadi dalam proses membuat
hardware dan software.
4.1.1. Penambahan Sensor Photodioda
Sistem diberi tambahan dua sensor photodioda (Receiver) dan led (Transmiter)
pada pengendali gorden yang dapat dilihat pada gambar 4.1. Penambahan sensor ini
bertujuan untuk mendeteksi gorden pada kondisi tutup penuh, buka ½ , dan buka penuh.
Gambar 4.1. Sensor Photodioda
Keterangan Gambar 4.1.
1 = LED (Transmiter)
2 = Sensor Photodioda 1 (Receiver)
3 = Sensor Photodioda 2 (Receiver)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

47
4.1.2. Perubahan Tampilan HMI
Pada tampilan menu utama dan tampilan pengendali di HMI sebelumnya dapat
dilihat pada gambar 3.13 dan 3.14. Hasil dari perubahan tampilan menu utama dan
tampilan animasi pengendali dapat dilihat pada gambar 4.2 dan 4.3.
Gambar 4.2. Tampilan perubahan menu utama
Pada tampilan menu utama terdapat perubahan pada bagian pengisian username
dan password. Pada tampilan sebelumnya username dan password dibuatkan
menggunakan rectangle. Hasil dari perubahan tampilan username dan password
menggunakan button.
Gambar 4.3. Tampilan perubahan animasi pengendali
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
Perubahan berikutnya ada pada tampilan layer kedua. Pada bagian tirai terdapat
perubahan warna dan penambahan animasi motor. Terdapat juga perubahan button menu
utama yang diganti menjadi logout, dan terdapat penambahan tampilan control panel yang
berisi tombol start, stop, waktu, hasil keluaran sensor Ultraviolet, dan tampilan warna pada
keluaran lampu.
4.1.3. Perubahan Rangkaian Switch Pada Sensor PIR
Rangkaian elektronis sensor PIR sebelumnya yang dirancang di bab III dapat
dilihat di gambar 3.9. Pada rangkaian tersebut terdapat perubahan komponen yaitu bagian
transistor. Transistor diganti dengan tipe BD139 dikarenakan pada saat percobaan
menggunakan transistor BC547 mengalami panas berlebih sehingga digantikan. Perubahan
perancangan dapat dilihat di gambar 4.4.
Gambar 4.4. Perubahan perancangan elektronis sensor PIR
4.1.4. Perubahan Range Kondisi Sensor Ultraviolet
Input sensor ultraviolet terbagi menjadi lima range yang dapat dilihat di gambar
3.8. Range tersebut dirancang sesuai dengan sumber dari matahari langsung yang diterima
oleh sensor. Setelah implementasi sensor mengalami kesulitan mendapatkan data uji jika
sumber cahaya dari sinar matahari. Setelah diganti sumber yang diterima oleh sensor UV
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

49
menggunakan LED UV kondisi dari setiap level mudah dipantau dan data uji mudah
didapatkan. Range yang mengalami perubahan dapat dilihat di gambar 4.5.
Gambar 4.5. Perubahan range sensor Ultraviolet
4.1.5. Perubahan Posisi Sensor PIR
Pengendali pintu pagar menggunakan sensor PIR sebagai input yang posisi sensor
sebelum dapat dilihat di gambar 3.3. Setelah implementasi sensor tidak bisa mendeteksi
mobil palsu dikarenakan cara kerja dari sensor PIR mendeteksi panas, sehingga posisi
sensor diubah lebih tinggi agar dapat mendeteksi panas tubuh dari manusia. Sensor ini juga
dapat mendeteksi panas dari mesin mobil, tetapi pada saat percobaan tidak mungkin
melakukan percobaan dengan mobil asli. Posisi sensor PIR dapat dilihat di gambar 4.6.
Gambar 4.6. Perubahan posisi sensor PIR
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
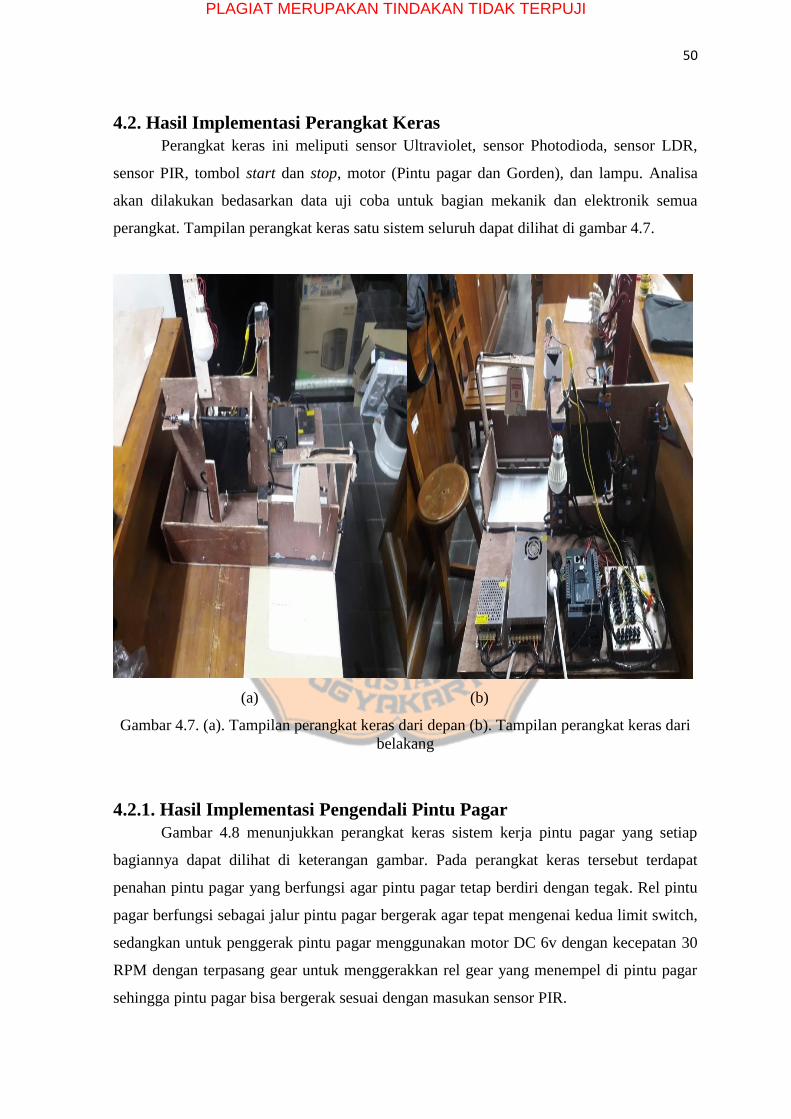
50
4.2. Hasil Implementasi Perangkat Keras
Perangkat keras ini meliputi sensor Ultraviolet, sensor Photodioda, sensor LDR,
sensor PIR, tombol start dan stop, motor (Pintu pagar dan Gorden), dan lampu. Analisa
akan dilakukan bedasarkan data uji coba untuk bagian mekanik dan elektronik semua
perangkat. Tampilan perangkat keras satu sistem seluruh dapat dilihat di gambar 4.7.
(a) (b)
Gambar 4.7. (a). Tampilan perangkat keras dari depan (b). Tampilan perangkat keras dari
belakang
4.2.1. Hasil Implementasi Pengendali Pintu Pagar
Gambar 4.8 menunjukkan perangkat keras sistem kerja pintu pagar yang setiap
bagiannya dapat dilihat di keterangan gambar. Pada perangkat keras tersebut terdapat
penahan pintu pagar yang berfungsi agar pintu pagar tetap berdiri dengan tegak. Rel pintu
pagar berfungsi sebagai jalur pintu pagar bergerak agar tepat mengenai kedua limit switch,
sedangkan untuk penggerak pintu pagar menggunakan motor DC 6v dengan kecepatan 30
RPM dengan terpasang gear untuk menggerakkan rel gear yang menempel di pintu pagar
sehingga pintu pagar bisa bergerak sesuai dengan masukan sensor PIR.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

51
Gambar 4.8. Mekanik pintu pagar
Keterangan Gambar 4.8.
1 = Limit Switch 1 (Pembatas Tutup)
2 = Rel gear
3 = Roda
4 = Rel Pintu Pagar
5 = Pintu Pagar
6 = Motor DC
7 = Hub
8 = Gear
9 = Penahan Pintu Pagar
10 = Limit Switch 2 (Pembatas Buka)
4.2.2. Hasil Implementasi Pengendali Gorden
Gambar 4.9 menunjukkan perangkat keras sistem kerja gorden. Pada perangkat
keras ini terdapat penggulung tirai yang berfungsi untuk menggulung tirai dengan
ditambahkan pemberat agar tirai tergulung dengan rapi. Sistem kerja ini digerakkan oleh
motor DC 6v dengan kecepatan 30 RPM yang tersambung dengan penggulung tirai
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
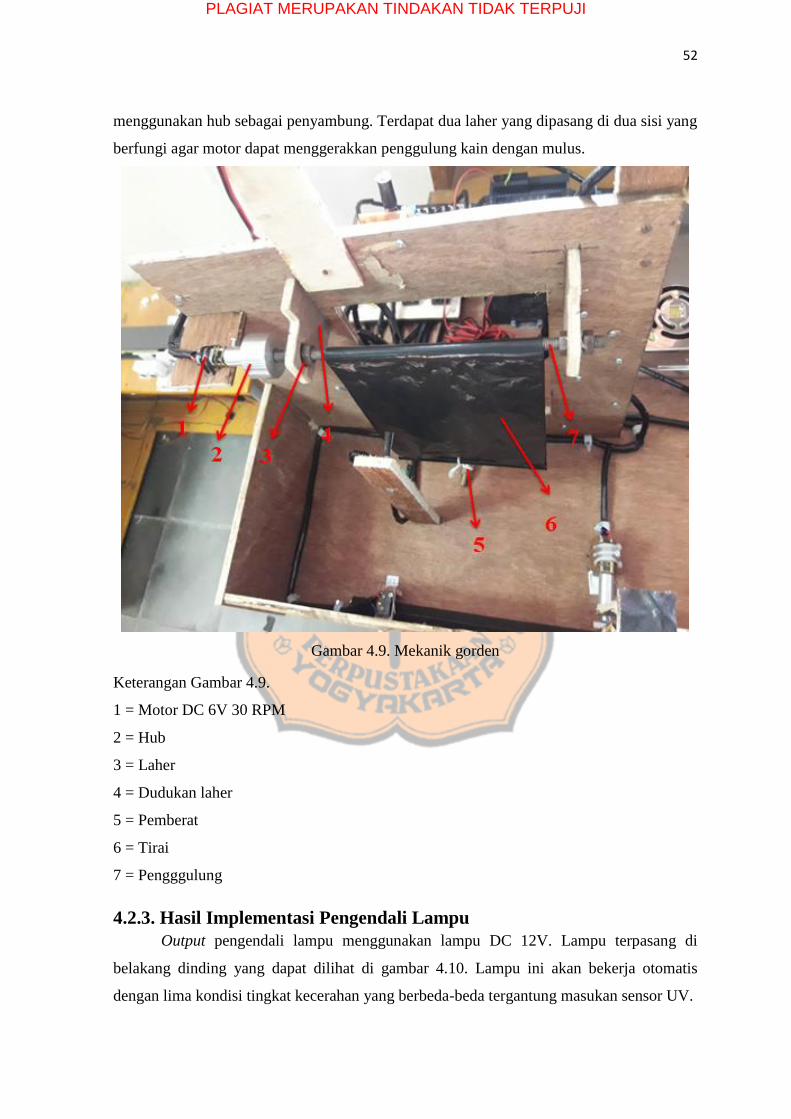
52
menggunakan hub sebagai penyambung. Terdapat dua laher yang dipasang di dua sisi yang
berfungi agar motor dapat menggerakkan penggulung kain dengan mulus.
Gambar 4.9. Mekanik gorden
Keterangan Gambar 4.9.
1 = Motor DC 6V 30 RPM
2 = Hub
3 = Laher
4 = Dudukan laher
5 = Pemberat
6 = Tirai
7 = Pengggulung
4.2.3. Hasil Implementasi Pengendali Lampu
Output pengendali lampu menggunakan lampu DC 12V. Lampu terpasang di
belakang dinding yang dapat dilihat di gambar 4.10. Lampu ini akan bekerja otomatis
dengan lima kondisi tingkat kecerahan yang berbeda-beda tergantung masukan sensor UV.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
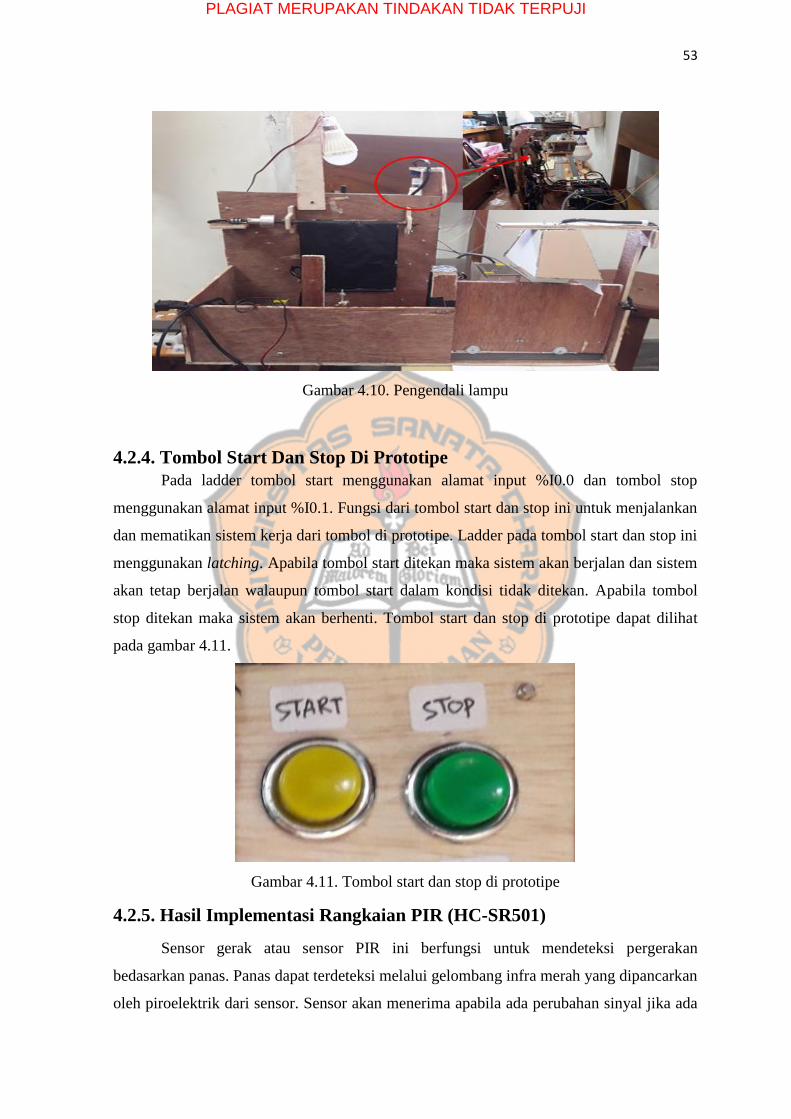
53
Gambar 4.10. Pengendali lampu
4.2.4. Tombol Start Dan Stop Di Prototipe
Pada ladder tombol start menggunakan alamat input %I0.0 dan tombol stop
menggunakan alamat input %I0.1. Fungsi dari tombol start dan stop ini untuk menjalankan
dan mematikan sistem kerja dari tombol di prototipe. Ladder pada tombol start dan stop ini
menggunakan latching. Apabila tombol start ditekan maka sistem akan berjalan dan sistem
akan tetap berjalan walaupun tombol start dalam kondisi tidak ditekan. Apabila tombol
stop ditekan maka sistem akan berhenti. Tombol start dan stop di prototipe dapat dilihat
pada gambar 4.11.
Gambar 4.11. Tombol start dan stop di prototipe
4.2.5. Hasil Implementasi Rangkaian PIR (HC-SR501)
Sensor gerak atau sensor PIR ini berfungsi untuk mendeteksi pergerakan
bedasarkan panas. Panas dapat terdeteksi melalui gelombang infra merah yang dipancarkan
oleh piroelektrik dari sensor. Sensor akan menerima apabila ada perubahan sinyal jika ada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

54
gerakan. Pada smarthome ini sensor PIR terpasang diatas pintu pagar setinggi ± 2m
dikarenakan menyesuaikan ketinggian rata-rata orang indonesia dan ketinggian maksimal
sensor PIR pada datasheet yang setinggi 2,4 m. Posisi dan jangkauan sensor PIR dapat
dilihat di gambar 4.12.
Gambar 4.12. Letak sensor PIR
Sensor PIR ini bekerja pada tegangan 5V apabila sensor PIR ini mendeteksi maka
tegangan keluarannya 3,84V, apabila sensor tidak mendeteksi maka tegangan keluarannya
0V. Sensor membutuhkan keluaran tegangan minimal 4,5V untuk menggerakkan relay
spesifikasi 5V, maka dari itu sensor dihubungkan rangkaian tambahan yang dapat dilihat di
gambar 4.4 agar sensor dapat menggerakkan relay. Bagian samping dari sensor PIR
ditambahkan karton agar sensor dapat mendeteksi secara fokus. Sehingga sensor dapat
mendeteksi dengan jangkauan yang dapat dilihat di tabel 4.1.
Tabel 4.1. Jangkauan sensor PIR
No Jangkauan (m) Kondisi Sensor PIR Kondisi Pintu Pagar
1 0 Mendeteksi Buka
2 0,5 Mendeteksi Buka
3 1 Mendeteksi Buka
4 1,49 Mendeteksi Buka
5 1,5 Mendeteksi Buka
6 1,51 Tidak mendeteksi Tutup
7 1,52 Tidak mendeteksi Tutup
8 1,6 Tidak mendeteksi Tutup
9 2 Tidak mendeteksi Tutup
10 2,5 Tidak mendeteksi Tutup
11 3 Tidak mendeteksi Tutup
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

55
4.2.6. Hasil Implementasi Rangkaian Sensor LDR
Pada pengendali Gorden input yang digunakan yaitu sensor LDR dengan
spesifikasi diameter sensor 5mm. Sensor LDR menggunakan rangkaian pembagi tegangan
dengan diberi sumber 5V yang bisa dilihat digambar 3.5. Posisi sensor ini diletakkan pada
bagian belakang tembok yang bisa dilihat di gambar 4.13. Sensor LDR ini mendeteksi tiga
kondisi yang berbeda-beda yaitu kondisi 1 (Buka penuh), kondisi 2 (Buka ½) , dan kondisi
3 (Tutup penuh) tergantung pada intensistas cahaya matahari (Lampu DC).
Gambar 4.13. Posisi sensor LDR
4.2.7. Hasil Implementasi Rangkaian Sensor UV
Pada pengendali lampu input yang digunakan berupa sensor UV dengan tipe
GUVA-S12D. Input ini dipasang dibagian belakang market yang dapat dilihat di gambar
4.14. Maksimal dari keluaran sensor ini sampai 100mV dengan sumber dari LED UV yang
kecerahannya dapat diatur melalui potensio. Total keluaran sensor dibagi menjadi lima
range dengan kondisi kecerahan yang berbeda-beda.
Gambar 4.14. Posisi sensor UV
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

56
4.2.8. Perangkat Keras Rangkaian Pembalik Arah Putaran Motor DC
Pada gambar 4.15 terdapat 2 buah relay di rangkaian pembalik arah putaran motor.
Rangkaian ini berfungsi untuk mengendalikan arah putaran motor ke arah CW dan CCW
yang rangkaian elektronis dapat dilihat di gambar 3.10. Rangkaian ini digunakan untuk
membuka dan menutup pengendali pintu pagar dan pengendali gorden.
Gambar 4.15. Tampilan perangkat keras rangkaian pembalik putaran motor
4.2.9. Perangkat Keras Rangkaian switch
Pada gambar 4.16 adalah rangkaian switch yang didalam rangkaian nya terdapat
satu buah relay 5V, resistor 56ohm, resistor 40 ohm, dan transistor BD139. Rangkaian ini
digunkan untuk sensor PIR dan Sensor Photodioda. Rangkaian ini sebagai penyaklar untuk
menggerakkan relay yang rangkaian elektronis dapat dilihat di gamabar 4.4.
Gambar 4.16. Tampilan perangkat keras rangkaian switch
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

57
4.3. Hasil Pengamatan Sistem
Bagian ini menjelaskan tentang hasil pengamatan sistem yang terdiri dari
pengamatan sistem utama dan sub sistem. Sistem utama terdiri dari pengamatan pengendali
lampu, pengamatan pengendali pintu pagar, dan pengamatan pengendali gorden. Pada sub
sistem pengamatan data diambil dengan cara mengukur tegangan pada setiap piranti input
dan piranti output.
4.3.1. Hasil Pengamatan Proses Login
Bagian ini menjelaskan proses login. Data diambil bedasarkan dari hasil percobaan.
Pada tampilan pertama pada HMI operator harus mengisi username dan password yang
telah ditentukan, apabila operator telah mengisi button pasword dan username dengan
benar maka button OK dapat ditekan dan melanjutkan ke tampilan kedua. Hasil
pengamatan proses login dapat dilihat di tabel 4.2.
Tabel 4.2. Tampilan HMI Proses login
No Keterangan Tampilan HMI
1 Layer pertama
dari tampilan HMI
atau kondisi
operator sebelum
masuk ke layer
kedua (animasi 3
objek).Harus
mengisi username
dan password
yang sudah
ditentukan.
2 Kondisi operator
memasukkan
username yang
sudah ditentukan
yaitu
“155114046”
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

58
Tabel 4.2. (Lanjutan) Tampilan HMI Proses login
No Keterangan Tampilan HMI
3 Kondisi operator
memasukkan
password yang
telah ditentukan
yaitu “sanjaya”
4 Kondisi operator
telah
memasukkan
username dan
password
dengan benar,
maka tombol
“ok” dapat
ditekan apabila
ditekan maka
operator akan
masuk ke layer
kedua.
Bedasarkan dari hasil pengamatan pada saat percobaan proses login. Proses login di
tampilan HMI berjalan dengan baik dan mudah dilakukan oleh operator yang memiliki
akses. Proses login dibuat sesuai dengan perancangan yang dibuat di bab sebelumnya.
4.3.2. Data Proses Aktif Sistem
Pada bagian ini menjelaskan sistem keseluruhan dari proses aktif sistem. Data
diambil bedasarkan dari hasil percobaan. Percobaan yang dilakukan dengan cara operator
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

59
dapat menekan button pada HMI atau operator bisa menekan Push Button pada perangkat
keras. Proses aktif sistem ini ditandai oleh lampu pada HMI yang terdapat pada tampilan
kedua apabila lampu bewarna merah maka sistem dalam keadaan tidak aktif dan
sebaliknya apabila lampu bewarna hijau maka sistem dalam keadaan aktif. Hasil
pengamatan proses aktif sistem dapat dilihat di tabel 4.3.
Tabel 4.3. Tampilan HMI proses aktif dan non aktif sistem
No Keterangan Tampilan HMI
1 Kondisi tombol
stop pada HMI
ditekan, maka
lampu sistem
akan bewarna
merah yang
artinya sistem
keadaan tidak
aktif
2 Kondisi tombol
start pada HMI
ditekan, maka
lampu sistem
bewarna hijau
yang artinya
sistem keadaan
aktif.
Bedasarkan dari hasil pengamatan pada saat percobaan proses aktif sistem. Buton
start dan stop di tampilan HMI dapat ditekan dan berjalan dengan baik pada saat
percobaan. Proses aktif sistem dibuat sesuai dengan perancangan yang dibuat di bab
sebelumnya.
4.3.3. Data Proses Pengendali Lampu
Pada bagian ini menjelaskan sistem keseluruhan dari proses pengendali lampu.
Data diambil bedasarkan dari hasil percobaan. Percobaan ini dilakukan dengan cara
memberi kecerahan yang berbeda-beda. Apabila range fluks cahaya led dari 0 lux sampai
48 lux maka kecerahan lampu menyala pada kondisi 100%. Apabila range fluks cahaya led
dari 49 lux sampai 63 lux maka kecerahan lampu menyala pada kondisi 75%. Apabila
range fluks cahaya led dari 64 lux sampai 99 lux maka kecerahan lampu menyala pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

60
kondisi 50%. Apabila range fluks cahaya led dari 100 lux sampai 182 lux maka kecerahan
lampu menyala pada kondisi 25%. dan apabila range fluks cahaya led lebih dari 182 lux
maka kecerahan lampu menyala pada kondisi 0%. Pengendali lampu dapat bekerja pada
kecerahan 100%, 75%, 50%, 25%, dan 0% menyesuaikan range intensitas cahaya yang
dapat dilihat di tabel 4.4. Data tampilan HMI pengendali lampu dapat dilihat di tabel 4.5.
Tabel 4.4. Data proses input pengendali lampu
No
Intensitas
cahaya LED
UV (lux)
Tegangan
keluaran
sensor (mV)
ADC
keluaran
sensor
DAC
keluaran
TM3AM6
Kondisi
lampu
Warna
Lampu
di HMI
1 0 0 0 8500 100% 2 41 2,6 0 8500 100% 3 48 19,5 0 8500 100% 4 49 22,2 2 7500 75%
5 56 26,9 2 7500 75%
6 63 32,5 2 7500 75%
7 64 34,1 4 7000 50%
8 82 39,2 5 7000 50%
9 99 72,8 5 7000 50%
10 100 73,1 7 6500 25% 11 160 94,2 9 6500 25% 12 182 101 9 6500 25% 13 183 102 10 0 0% 14 203 108,4 11 0 0%
Tabel 4.5. Tampilan HMI proses pengendali lampu
No Keterangan Tampilan HMI
1 Kondisi lampu
dalam kecerahan
100% dengan
warna lampu pada
HMI sesuai dengan
warna pada control
panel.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
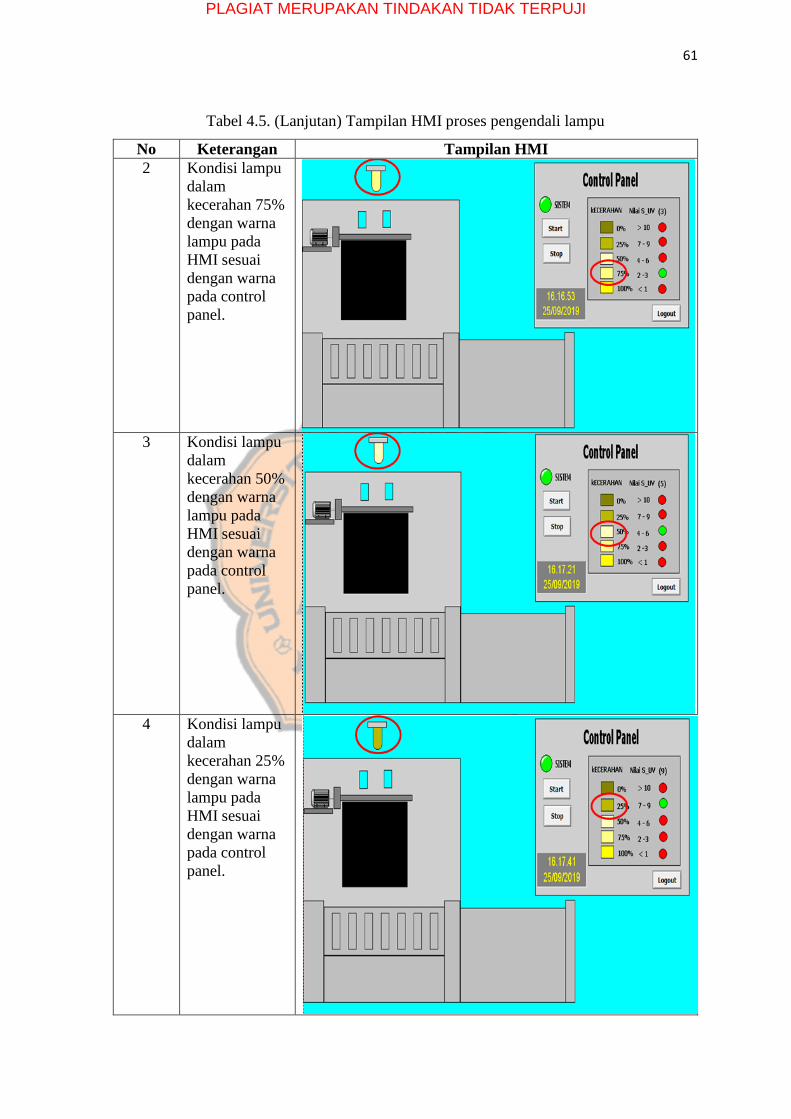
61
Tabel 4.5. (Lanjutan) Tampilan HMI proses pengendali lampu
No Keterangan Tampilan HMI
2 Kondisi lampu
dalam
kecerahan 75%
dengan warna
lampu pada
HMI sesuai
dengan warna
pada control
panel.
3 Kondisi lampu
dalam
kecerahan 50%
dengan warna
lampu pada
HMI sesuai
dengan warna
pada control
panel.
4 Kondisi lampu
dalam
kecerahan 25%
dengan warna
lampu pada
HMI sesuai
dengan warna
pada control
panel.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

62
Tabel 4.5. (Lanjutan) Tampilan HMI proses pengendali lampu
No Keterangan Tampilan HMI
5 Kondisi lampu
dalam
kecerahan 0%
dengan warna
lampu pada
HMI sesuai
dengan warna
pada control
panel.
Bedasarkan dari hasil pengamatan pada saat percobaan proses pengendali lampu.
Lampu dapat menyala di semua kondisi, walaupun pada saat pengambilan data sedikit
mengalami kesulitan dikarenakan sumber kecerahan dari LED UV hanya dapat terbaca
maksimal 100 mV oleh sensor UV. Sehingga range pada ladder jaraknya dekat, maka pada
saat data tidak stabil kondisi lampu dapat berganti-ganti.
4.3.4. Data Proses Pengendali Pintu Pagar
Pada bagian ini menjelaskan sistem keseluruhan dari pengendali pintu pagar. Data
diambil bedasarkan dari hasil percobaan. Percobaan ini dilakukan dengan memberi
gerakan (1) pada area sensor sehingga kondisi pintu pagar membuka dan apabila pada area
sensor tidak mendeteksi (0) adanya gerakan maka pintu pagar akan menutup jangkauan
sensor mendeteksi dapat dilihat di tabel 4.12. Waktu yang ditempuh pada saat pintu pagar
membuka dan menutup sekitar 18,13 detik sampai menyentuh limit switch buka maupun
tutup. Pengendali pintu pagar dapat bekerja buka dan tutup menyesuaikan sensor
mendeteksi atau tidak mendeteksi dapat dilihat di tabel 4.6. Tampilan HMI pengendali
pintu pagar berupa animasi pada saat pintu pagar membuka dan menutup dapat dilihat di
tabel 4.7.
Tabel 4.6. Data proses input pengendali pintu pagar
No Kondisi Sensor Keluaran
PIR (Volt)
Keluaran
Switch (Volt)
Kondisi
pintu
pagar
KET
1 Mendeteksi (1) 3,84 4.80 Buka (CW) Relay aktif
2 Tidak Mendeteksi (0) 0 0 Tutup
(CCW)
Relay tidak
aktif
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
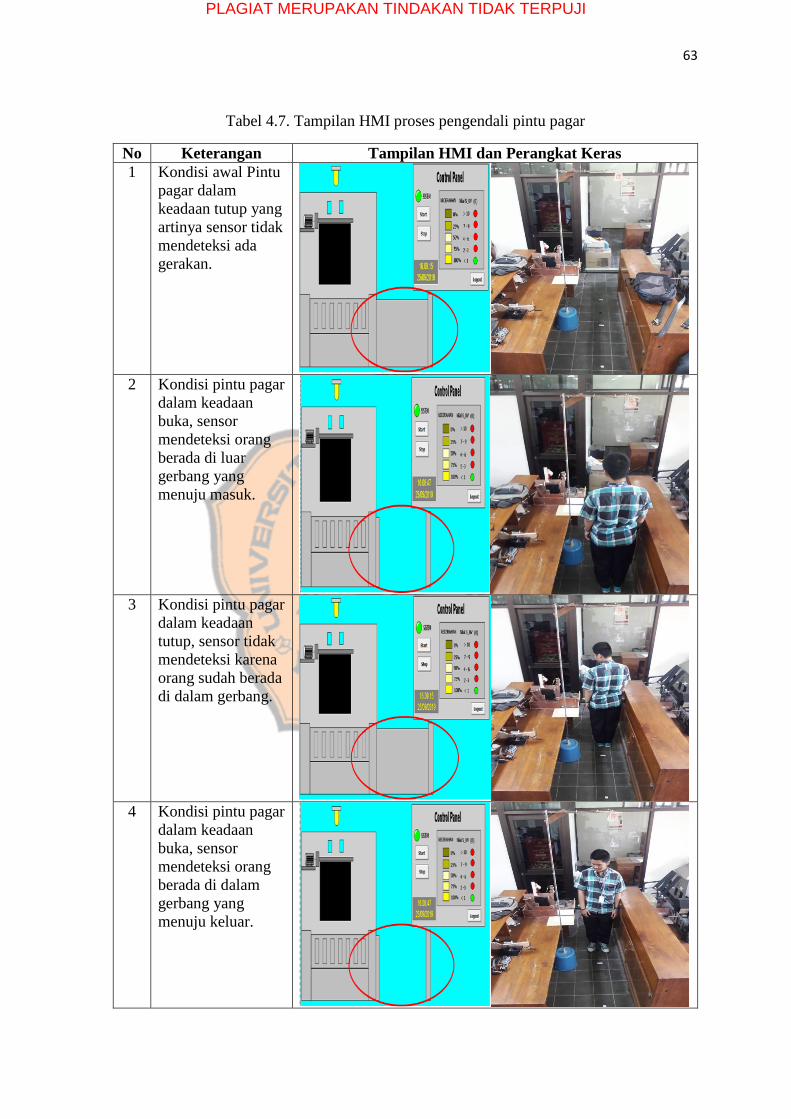
63
Tabel 4.7. Tampilan HMI proses pengendali pintu pagar
No Keterangan Tampilan HMI dan Perangkat Keras
1 Kondisi awal Pintu
pagar dalam
keadaan tutup yang
artinya sensor tidak
mendeteksi ada
gerakan.
2 Kondisi pintu pagar
dalam keadaan
buka, sensor
mendeteksi orang
berada di luar
gerbang yang
menuju masuk.
3 Kondisi pintu pagar
dalam keadaan
tutup, sensor tidak
mendeteksi karena
orang sudah berada
di dalam gerbang.
4 Kondisi pintu pagar
dalam keadaan
buka, sensor
mendeteksi orang
berada di dalam
gerbang yang
menuju keluar.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

64
Tabel 4.7. (Lanjutan) Tampilan HMI proses pengendali pintu pagar
No Keterangan Tampilan HMI dan Perangkat Keras
5 Kondisi pintu pagar
dalam keadaan
tutup, sensor tidak
mendeteksi karena
orang sudah berada
di luar gerbang.
Bedasarkan dari hasil pengamatan pada saat percobaan proses pengendali pintu
pagar. Proses pengendali pintu pagar dapat berjalan dengan baik dan tampilan animasi
pintu pagar pada HMI bekerja sesuai dengan kondisi realtime pintu pagar. Walaupun
terkadang tampilan pintu pagar pada HMI saat membuka sedikit melenceng dari kondisi
realtime. Dikarenakan adanya slip (motor DC bergerak tetapi pintu tidak berjalan) pada
saat menggerakkan pintu pagar sehingga pada saat pintu pagar sudah menekan limit switch
tampilan HMI belum sampai.
4.3.5. Data Proses Pengendali Gorden
Pada bagian ini menjelaskan sistem keseluruhan dari pengendali Gorden. Data
diambil bedasarkan hasil percobaan. Percobaan ini dilakukan dengan mencoba masing
masing dari setiap kondisi, apabila range fluks cahaya lampu dari 0 lux sampai 153 lux
maka kondisi gorden pada kondisi tiga (tutup penuh), apabila range fluks cahaya lampu
dari 154 lux sampai 1,063 lux maka kondisi gorden pada kondisi dua (buka ½), dan apabila
range fluks cahaya lampu lebih dari 1,180 lux maka kondisi gorden pada kondisi satu
(buka penuh). Pengendali gorden dapat bekerja pada kondisi tutup penuh, buka ½, dan
buka penuh menyesuaikan range intensitas cahaya yang dapat dilihat pada tabel 4.8. Data
tampilan HMI pengendali gorden dapat dilihat di tabel 4.9.
Tabel 4.8. Data proses input pengendali gorden
No Intensitas Cahaya
(lux)
Tegangan keluaran
Sensor LDR (V) Kondisi Gorden
1 0 0 K3 (Tutup Penuh)
2 89 0,499 K3 (Tutup Penuh)
3 94 0,518 K3 (Tutup Penuh)
4 113 0,660 K3 (Tutup Penuh)
5 153 1,49 K3 (Tutup Penuh)
6 154 1,58 K2 (Buka ½)
7 189 1,659 K2 (Buka ½)
8 931 2,749 K2 (Buka ½)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
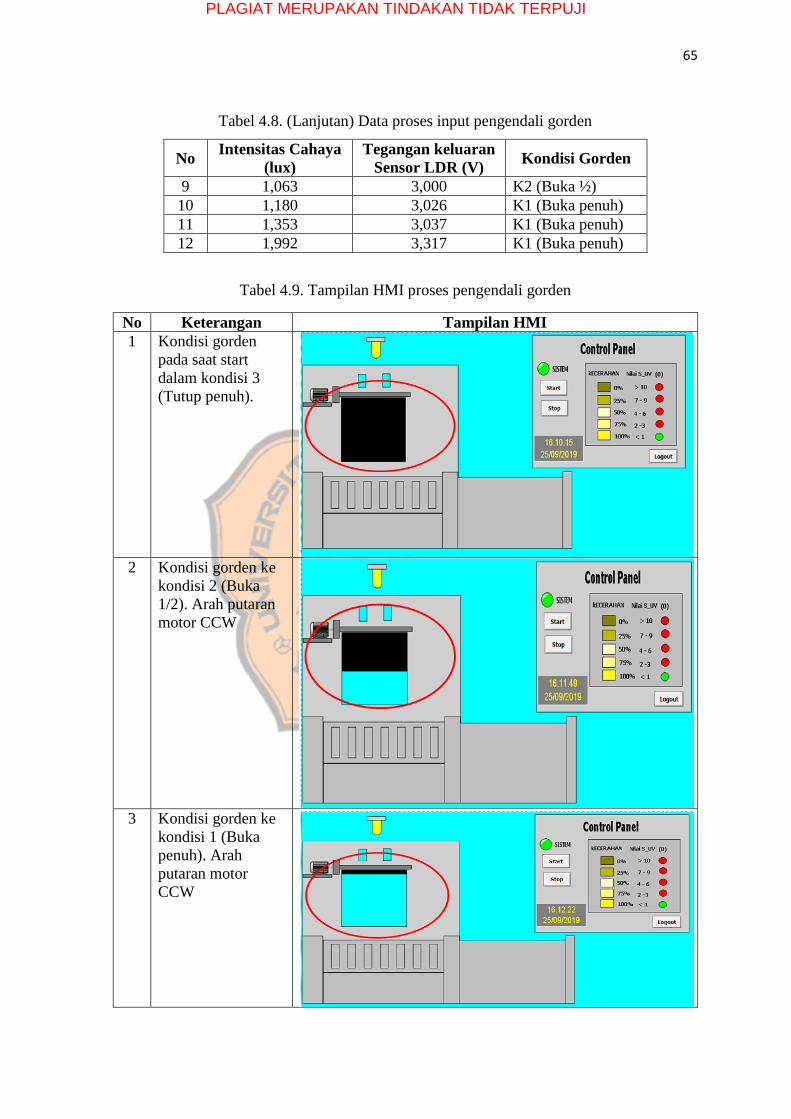
65
Tabel 4.8. (Lanjutan) Data proses input pengendali gorden
No Intensitas Cahaya
(lux)
Tegangan keluaran
Sensor LDR (V) Kondisi Gorden
9 1,063 3,000 K2 (Buka ½)
10 1,180 3,026 K1 (Buka penuh)
11 1,353 3,037 K1 (Buka penuh)
12 1,992 3,317 K1 (Buka penuh)
Tabel 4.9. Tampilan HMI proses pengendali gorden
No Keterangan Tampilan HMI
1 Kondisi gorden
pada saat start
dalam kondisi 3
(Tutup penuh).
2 Kondisi gorden ke
kondisi 2 (Buka
1/2). Arah putaran
motor CCW
3 Kondisi gorden ke
kondisi 1 (Buka
penuh). Arah
putaran motor
CCW
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

66
Tabel 4.9. (Lanjutan) Tampilan HMI proses pengendali gorden
No Keterangan Tampilan HMI
4 Kondisi
gorden ke
kondisi 2
(Buka 1/2 ).
Arah putaran
motor CW
5 Kondisi
gorden ke
kondisi 3
(Tutup
penuh). Arah
putaran motor
CW
Bedasarkan dari hasil pengamatan pada saat percobaan proses pengendali gorden.
Proses pengendali gorden dapat berjalan dengan baik dan tampilan animasi gorden pada
HMI bekerja sesuai dengan kondisi realtime gorden.
4.4. Implementasi Perangkat Lunak
Pada perangkat lunak ini terdapat ladder tombol start dan stop di HMI, ladder
pengendali pintu pagar, ladder pengendali lampu, ladder pengendali gorden dan tampilan
HMI
4.4.1. Tombol Start Dan Stop Di HMI
Pada ladder tombol start di HMI menggunakan alamat memori %M0 dan tombol
stop di HMI menggunakan alamat memori %M1 yang dapat dilihat di gambar 4.17. Fungsi
dari tombol start dan stop ini untuk menjalankan dan mematikan sistem kerja dari HMI.
Ladder pada tombol start dan stop ini menggunakan latching, apabila tombol start ditekan
maka sistem akan berjalan dan sistem akan tetap berjalan walaupun tombol start dalam
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

67
kondisi tidak ditekan, apabila tombol stop ditekan maka sistem akan berhenti. Tombol start
dan stop di HMI dapat dilihat pada gambar 4.18.
Gambar 4.17. Ladder tombol start dan stop di HMI
Gambar 4.18. Tombol start dan stop di HMI
4.4.2. Ladder Pendeteksi Kondisi Gorden
Untuk mengendalikan gorden diperlukan motor DC untuk menggulung gorden.
Motor DC bekerja sesuai dengan timer yang ditentukan, yang setiap kondisi gorden
bekerja dengan timer yang berbeda-beda yang dapat dilihat di gambar 3.19. Gambar pada
4.19 menunjukan ladder untuk sensor photodioda yang berfungsi untuk mendeteksi gorden
pada kondisi mana. Sebagai contoh apabila sensor PD bawah (%I0.6) dan sensor PD atas
(%I0.5) terhalang atau bernilai nol maka kondisi gorden pada kondisi tiga (Tutup penuh).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
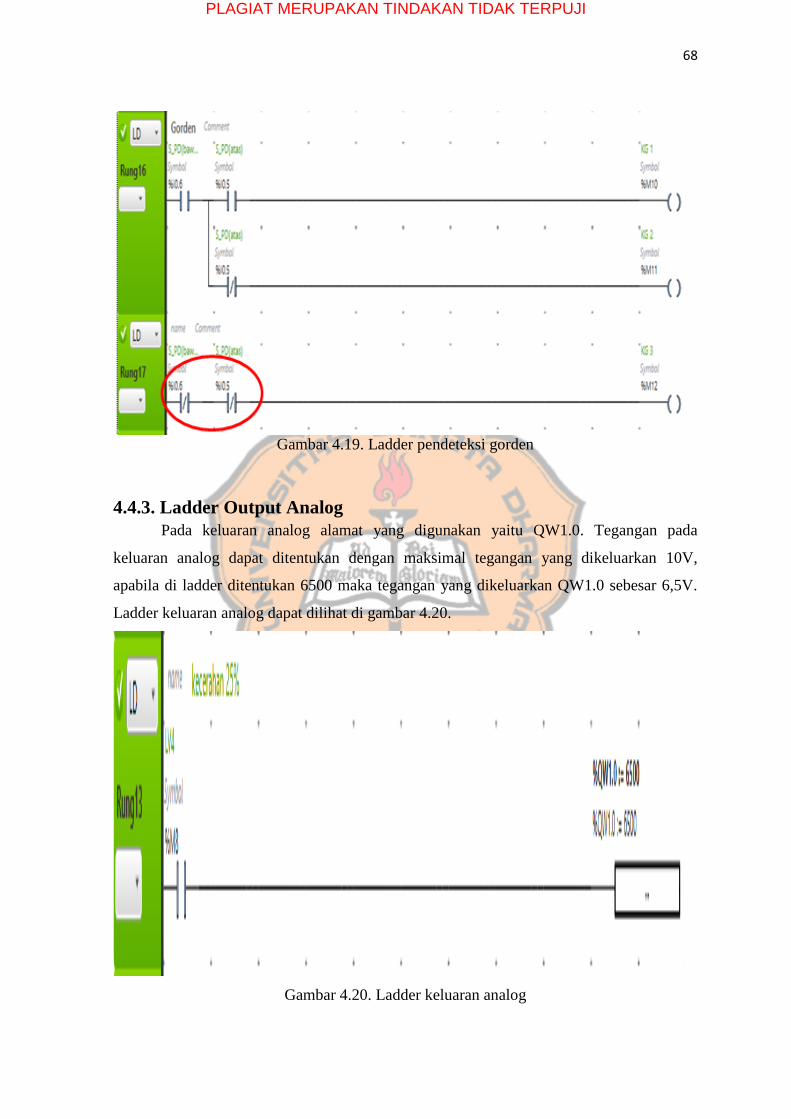
68
Gambar 4.19. Ladder pendeteksi gorden
4.4.3. Ladder Output Analog
Pada keluaran analog alamat yang digunakan yaitu QW1.0. Tegangan pada
keluaran analog dapat ditentukan dengan maksimal tegangan yang dikeluarkan 10V,
apabila di ladder ditentukan 6500 maka tegangan yang dikeluarkan QW1.0 sebesar 6,5V.
Ladder keluaran analog dapat dilihat di gambar 4.20.
Gambar 4.20. Ladder keluaran analog
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

69
4.4.4. Timer-TP (Timer pulse) Menggerakkan Motor DC
Pada ladder pengendali gorden motor dijalankan sesuai dengan timer yang
ditentukan. Tipe timer yang digunakan tipe TP (Timer pulse) yang bekerja selama timer
ditentukan. Ladder tipe TP dapat dilihat di gambar 4.21.
Gambar 4.21. Ladder timer tipe TP (Timer-pulse)
4.4.5. Proses Login
Pada layer pertama di tampilan HMI terdapat proses login. Operator harus
memasukan username dan password yang telah ditentukkan. Username yang ditentukan
yaitu “155114046” dan password yang ditentukan “sanjaya” apabila pengisisan username
dan password benar maka button “OK” dapat ditekan. Pada button username menggunakan
tagname “$OperatorEntered” dan pada button password menggunakan tagname
$PasswordEntered yang dapat dilihat di gambar 4.22.
Gambar 4.22. Tagname password dan username
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
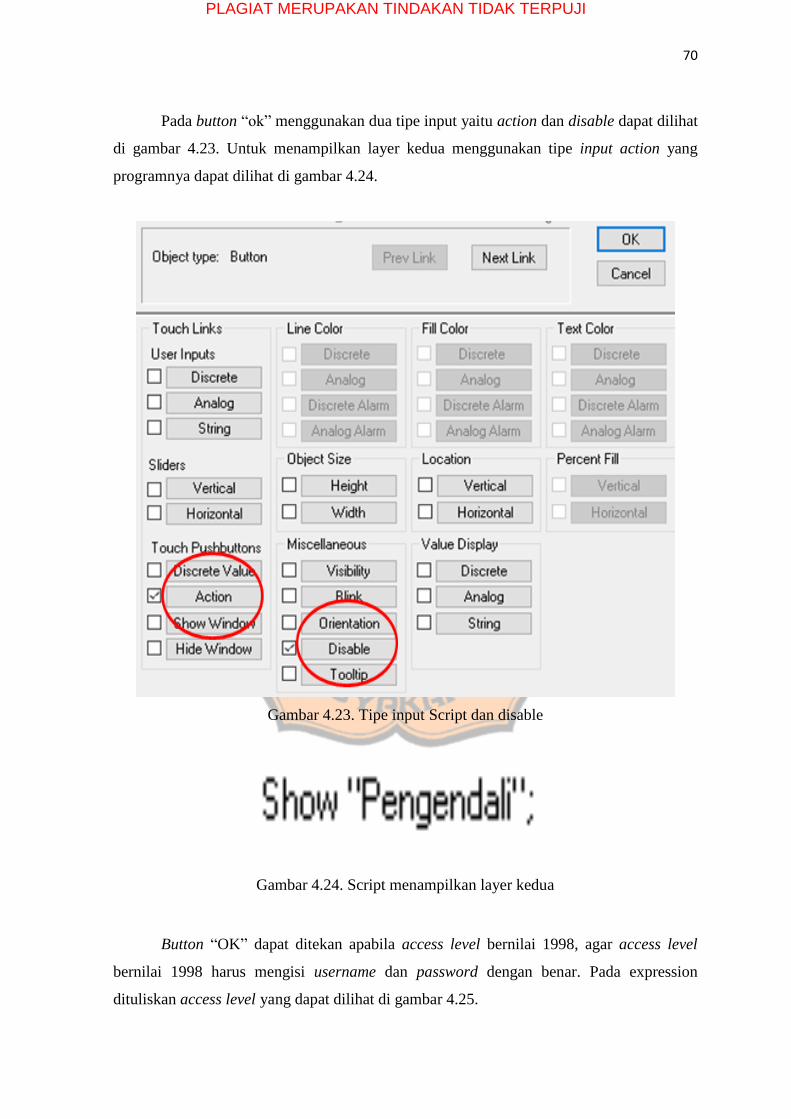
70
Pada button “ok” menggunakan dua tipe input yaitu action dan disable dapat dilihat
di gambar 4.23. Untuk menampilkan layer kedua menggunakan tipe input action yang
programnya dapat dilihat di gambar 4.24.
Gambar 4.23. Tipe input Script dan disable
Gambar 4.24. Script menampilkan layer kedua
Button “OK” dapat ditekan apabila access level bernilai 1998, agar access level
bernilai 1998 harus mengisi username dan password dengan benar. Pada expression
dituliskan access level yang dapat dilihat di gambar 4.25.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

71
Gambar 4.25. Tipe disable
Pada layer kedua terdapat button Logout menggunakan tipe input action. Berfungsi
untuk kembali ke layer sebelumnya (Menu utama) dan mereset username dan password.
Sehingga button “ok” tidak dapat ditekan dan operator wajib mengisi kembali username
dan password dengan benar. Program reset pada baris pertama memanggil “Logoffresult”,
program pada baris kedua berfungsi mengkosongkan Logoff, dan program pada baris
ketiga berfungsi menampilkan “menu utama”. Program reset dapat dilihat di gambar 4.26.
Gambar 4.26. Program reset di button logout
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
72
4.4.6. Script Animasi Pengendali Gorden
Program untuk pengendali gorden di window script dapat dilihat di gambar 4.27.
Program berfungsi untuk mengkondisikan tampilan awal pada saat di runtime. Pada
properties percent fill gorden value at max fill diatur 100 sehingga kondisi awal saat di
runtime gorden tutup penuh apabila sebaliknya value at max fill diatur 0 maka kondisi awal
gorden saat di runtime buka penuh.
Gambar 4.27. Window script pengendali gorden
Program gorden pada saat buka dapat dilihat di gambar 4.28. Program berfungsi
untuk membuka gorden dengan mengurangi 1 nilai max fill setiap 3 Msec pada tagname
“GORDEN”.
Gambar 4.28. Program buka gorden
Program gorden pada saat tutup dapat dilihat di gambar 4.29. Program berfungsi
untuk menutup gorden dengan menambah 1 nilai max fill setiap 3 Msec pada tagname
“GORDEN”.
Gambar 4.29. Program tutup gorden
4.4.7. Script Animasi Pengendali Pintu Pagar
Program untuk pengendali Pintu pagar di window script dapat dilihat di gambar
4.30. Program berfungsi untuk mengkondisikan tampilan awal pada saat di runtime. Pada
properties location pintu pagar value at left end diatur 0 sehingga posisi pintu pagar pada
saat runtime pada posisi awal atau tutup penuh.
Gambar 4.30. Window script pengendali pintu pagar
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

73
Program pintu pagar pada saat buka dapat dilihat di gambar 4.31. Program
berfungsi untuk membuka pintu pagar dengan menambah 1 nilai at left end setiap 185
Msec pada tagname “PINTUPAGAR”.
Gambar 4.31. Program buka pintu pagar
Program pintu pagar pada saat tutup dapat dilihat di gambar 4.32. Program
berfungsi untuk menutup pintu pagar dengan mengurangi 1 nilai at left end setiap 185
Msec pada tagname “PINTUPAGAR”.
Gambar 4.32. Program tutup pintu pagar
4.4.8. Tagname Dictionary
Bagian ini berisi tentang tagname yang digunakan di dalam pembuatan HMI.
Penggunaan tagname sesuai dengan alamat memori PLC pada perancangan dan terdapat
penambahan tagname. Tagname yang dipakai dapat dilihat di tabel 4.10.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
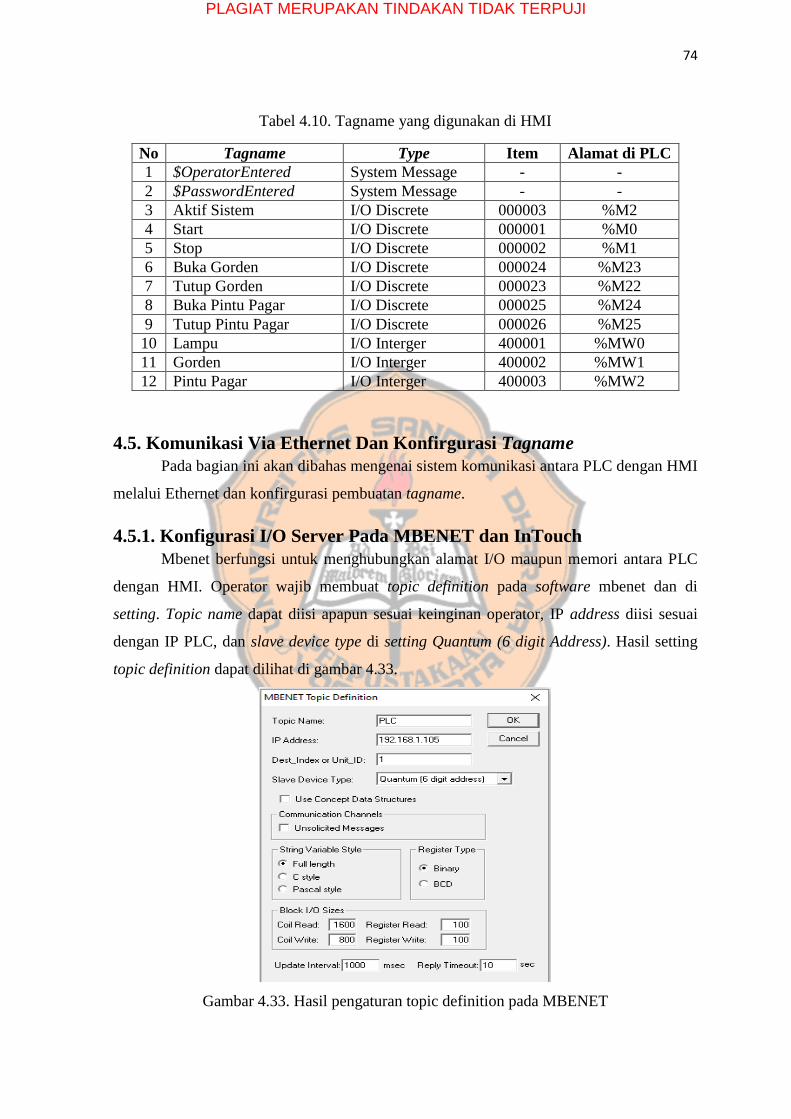
74
Tabel 4.10. Tagname yang digunakan di HMI
No Tagname Type Item Alamat di PLC
1 $OperatorEntered System Message - -
2 $PasswordEntered System Message - -
3 Aktif Sistem I/O Discrete 000003 %M2
4 Start I/O Discrete 000001 %M0
5 Stop I/O Discrete 000002 %M1
6 Buka Gorden I/O Discrete 000024 %M23
7 Tutup Gorden I/O Discrete 000023 %M22
8 Buka Pintu Pagar I/O Discrete 000025 %M24
9 Tutup Pintu Pagar I/O Discrete 000026 %M25
10 Lampu I/O Interger 400001 %MW0
11 Gorden I/O Interger 400002 %MW1
12 Pintu Pagar I/O Interger 400003 %MW2
4.5. Komunikasi Via Ethernet Dan Konfirgurasi Tagname
Pada bagian ini akan dibahas mengenai sistem komunikasi antara PLC dengan HMI
melalui Ethernet dan konfirgurasi pembuatan tagname.
4.5.1. Konfigurasi I/O Server Pada MBENET dan InTouch
Mbenet berfungsi untuk menghubungkan alamat I/O maupun memori antara PLC
dengan HMI. Operator wajib membuat topic definition pada software mbenet dan di
setting. Topic name dapat diisi apapun sesuai keinginan operator, IP address diisi sesuai
dengan IP PLC, dan slave device type di setting Quantum (6 digit Address). Hasil setting
topic definition dapat dilihat di gambar 4.33.
Gambar 4.33. Hasil pengaturan topic definition pada MBENET
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

75
Setelah membuat topic definition pada software mbenet. Operator kemudian
membuat access name pada software intouch. Operator dapat mengisi access name apapun
sesuai yang diinginkan, application name diisi kata “MBENET”, dan topic name diisi
sesuai dengan topic name yang dibuat di software mbenet. Hasil pengaturan access names
pada Wonderware InTouch dapat dilihat di gambar 4.34.
Gambar 4.34. Hasil pengaturan access names pada Wonderware InTouch
4.5.2. Konfigurasi Alamat IP Pada PLC
Komunikasi antara PLC dengan komputer dilakukan melalui jaringan ethernet.
supaya PLC dapat melakukan komunikasi dengan komputer, maka perlu dilakukan
pengaturan alamat ip pada aplikasi SoMachineBasic. Operator dapat mengisi alamat ip
sesuai dengan yang diinginkan jika sudah selesai klik Apply maka alamat ip PLC otomatis
terganti dengan yang baru. Hasil konfirgurasi alamat ip PLC dapat dilihat di gambar 4.35.
Gambar 4.35. Hasil konfirgurasi alamat IP PLC
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

76
4.5.3. Konfigurasi Pengaturan Tagname
Berikut pembuatan tagname pada software wonderware intouch seperti berikut :
1. Pilih menu “Spesial” seperti pada gambar 4.36.
2. Pilih “Tagname Dictionary”
Gambar 4.36. Konfirgurasi pengaturan tagname
3. Pilih menu “New”(apabila tagname belum ada) seperti pada gambar 4.37.
4. Isi nama tagname.
5. Pilih type tagname.
6. Pilih access name yang sudah dibuat.
7. Item diisi bedasarkan tipe memori pada PLC, apabila tipe memori bit maka item diisi
“000000” dan apabila memori word maka item diisi dengan “400000”.
8. Alamat memori diisi pada digit paling kanan dan ditambah 1, misalkan pada alamat
memori %M0 maka item diisi “000001” dan apabila pada alamat memori %MW0 maka
item diisi “400001”.
Gambar 4.37. Konfirgurasi pengaturan tagname
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
77
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Bedasarkan hasil penelitian “SCADA Sebuah Smarthome Untuk Pengendali
Lampu, Pengendali Pintu Pagar Rumah, Dan Pengendali Gorden Berbasis PLC Schneider
M221” dapat disimpulkan :
1. Dari data pengendali gorden, gorden dapat bekerja pada kondisi gorden tutup penuh,
buka 1/2 , dan buka penuh. Apabila range intensitas cahaya dari 0 Lux sampai 153
Lux maka kondisi gorden tutup penuh.
2. Dari data pengendali pintu pagar, pintu pagar dapat bekerja buka dan tutup. Apabila
sensor mendeteksi maka pintu pagar akan buka.
3. Dari data pengendali lampu, lampu dapat bekerja pada kecerahan 100%, 75%, 50%,
25%, dan 0%. Apabila range intensitas cahaya dari 0 Lux sampai 48 Lux maka
kecerahan lampu 100%.
4. Tampilan HMI pengendali lampu, animasi warna lampu di HMI dapat berubah-ubah
menyesuaikan kecerahan tertentu. Tampilan HMI pengendali pintu pagar, animasi
pintu di HMI dapat buka dan tutup. Tampilan HMI pengendali gorden, animasi
gorden dapat buka penuh, buka ½, dan tutup penuh.
5.2. Saran
Setelah melakukan penelitian terdapat beberapa saran untuk penelitian selanjutnya,
yaitu :
1. Pengendali pintu pagar dapat dikembangkan agar tidak semua orang dapat masuk,
melainkan hanya orang yang memiliki akses saja bisa masuk.
2. HMI dapat dikembangkan agar operator memiliki akses untuk mengendalikan
objek-objek langsung dari HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
78
DAFTAR PUSTAKA
[1] A. J. hakim, 2015. [Online]. Available:
https://www.slideshare.net/Uofa_Unsada/prototype-smart-home-dengan-konsep-
internet-of-thing-iot-menggunakan-arduino-berbasis-web. [Accessed 10 Maret 2019].
[2] "rifqi-on com," [Online]. Available: http://www.rifqion.com/menulis/scada-dan-plc/.
[Accessed 10 Maret 2019].
[3] B. T. Apriyanto. [Online]. Available:
https://repository.usd.ac.id/6713/2/125114028_full.pdf. [Accessed 17 Desember
2018].
[4] "immersa lab," 1 Maret 2018. [Online]. Available: http://www.immersa-
lab.com/teknologi-smarthome-dan-manfaatnya.htm. [Accessed 8 Februari 2019].
[5] kitoma indonesia, "kitoma indonesia," kitoma indonesia, [Online]. Available:
http://www.kitomaindonesia.com/article/16/programmable-logic-controller.
[Accessed 8 Februari 2019].
[6] Schneider Electric, Modicon M221 Logic Controller Hardware Guide, pp. 201-206,
2018.
[7] Schneider Electric, "Struktur Object Memory PLC M221, SoMachine Basic,"
[Online]. Available: https://www.schneider-electric.com. [Accessed 12 April 2019].
[8] H. Wicaksono, PROGRAMMABLE LOGIC CONTROLLER Teori, Pemrograman
dan Aplikasinya dalam Otomasi Sistem, Yogyakarta: GRAHA ILMU, 2009.
[9] [Online]. Available: http://eprints.polsri.ac.id/2088/3/BAB%20II.pdf. [Accessed 8
Februari 2019].
[10] SEED STUDIO, "SEED STUDIO," 20 September 2015. [Online]. Available:
http://www.mouser.com/catalog/specsheets/Seeed_101020043.pdf. [Accessed 22
Februari 2019].
[11] Electroschematic, "GUVA-S12SD UV Sensor Module & Circuit," [Online].
Available: https://www.electroschematics.com/11509/guva-s12sd-uv-sensor-module-
circuit/. [Accessed 19 juli 2019].
[12] Elektronika Dasar, "Elektronika Dasar," 2 September 2012. [Online]. Available:
http://elektronika-dasar.web.id/sensor-cahaya-ldr-light-dependent-resistor/. [Accessed
11 Februari 2019].
[13] Immersa LAB, "Immersa LAB," 27 Februari 2018. [Online]. Available:
http://www.immersa-lab.com/pengertian-sensor-ldr-fungsi-dan-cara-kerja-ldr.htm.
[Accessed 9 Februari 2019].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

79
[14] T. D. SUYADHI, "ROBOTICS UNIVERSITY," 3 Oktober 2014. [Online]. Available:
http://www.robotics-university.com/2014/10/light-dependent-resistor-ldr.html.
[Accessed 11 Februari 2019].
[15] E-BELAJAR ELEKTRONIKA, "E-BELAJAR ELEKTRONIKA," 24 Oktober 2019.
[Online]. Available: http://e-belajarelektronika.com/sensor-gerak-pir-passive-infra-
red/. [Accessed 11 Februari 2019].
[16] L. Ada, "PIR motion sensor," 22 September 2018. [Online]. Available: https://cdn-
learn.adafruit.com/downloads/pdf/pir-passive-infrared-proximity-motion-sensor.pdf.
[Accessed 28 Februari 2019].
[17] S. 30 Oktober 2015. [Online]. Available: http://blog.unnes.ac.id/antosupri/limit-
switch-saklar-pembatas/. [Accessed 12 Februari 2019].
[18] T. Jatmiko, "GURARU," 25 September 2013. [Online]. Available:
http://guraru.org/guru-berbagi/pengendali-lampu-pijar-menggunakan-limit-switch/.
[Accessed 12 Februari 2019].
[19] A. Purnama, "ELEKTRONIKA DASAR," 3 Januari 2019. [Online]. Available:
http://elektronika-dasar.web.id/limit-switch-dan-saklar-push-on/. [Accessed 12
Februari 2019].
[20] "BELAJAR ELEKTRONIKA," 23 Juli 2017. [Online]. Available:
http://belajarelektronika.net/pengertian-motor-dc-fungsi-dan-prinsip-kerjanya/.
[Accessed 25 Maret 2019].
[21] IMMERSA LAB, "IMMERSA LAB," 2 Maret 2018. [Online]. Available:
http://www.immersa-lab.com/pengertian-relay-fungsi-dan-cara-kerja-relay.htm.
[Accessed 25 Maret 2019].
[22] H. Wicaksono, Dasar-dasar Pemrograman SCADA Software dengan Wonderware In
Touch, Yogyakarta: GRAHA ILMU, 2012.
[23] T. P. A. Setiyani and M. , "PEMBELAJARAN SCADA BAGI MAHASISWA
TEKNIK ELEKTRO UNTUK MENJAWAB TANTANGAN DAN PELUANG
REVOLUSI INDUSTRI 4.0," Seminar Nasional Riset dan Teknologi Terapan 2018
(RITEKTRA 2018), pp. 2-3, 2017.
[24] Invensys Systems, Inc, "Wonderware Modicon MODBUS Ethernet I/O Server,"
September 2003. [Online]. Available: https://www.logic-control.com. [Accessed 11
April 2019].
[25] Schneider Electric, "TM3AM6," [Online]. Available: https://www.schneider-
electric.com. [Accessed 12 Juni 2019].
[26] R. L. B. L. Nashelsky, "Electronic Devices and Circuit Theory Tenth Editionl,"
ACADEMIA, [Online]. Available: https://www.academia.edu/11918894l. [Accessed
21 juli 2019].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

80
[27] D. Kho, "Pengertian Transistor Darlington dan Konfigurasinya," teknik elektronika,
[Online]. Available: https://teknikelektronika.com/pengertian-transistor-darlington-
konfigurasi-transistor-darlington/. [Accessed 21 juli 2019].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

81
LAMPIRAN
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
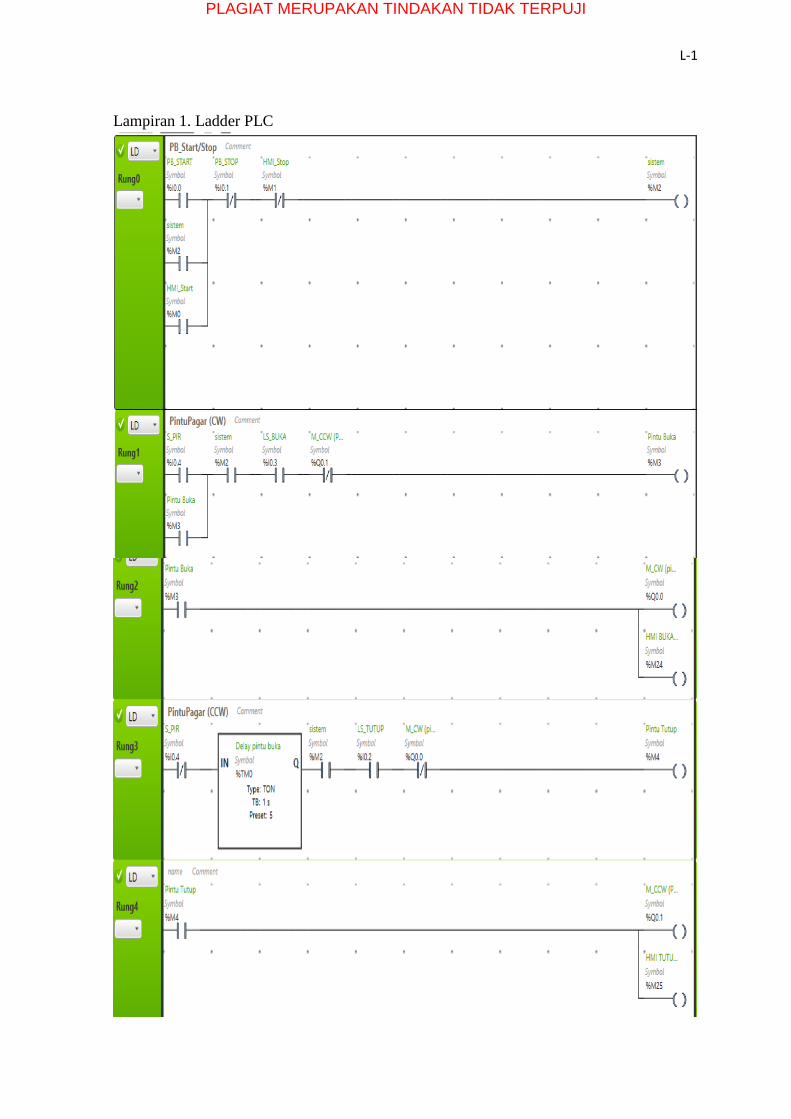
L-1
Lampiran 1. Ladder PLC
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
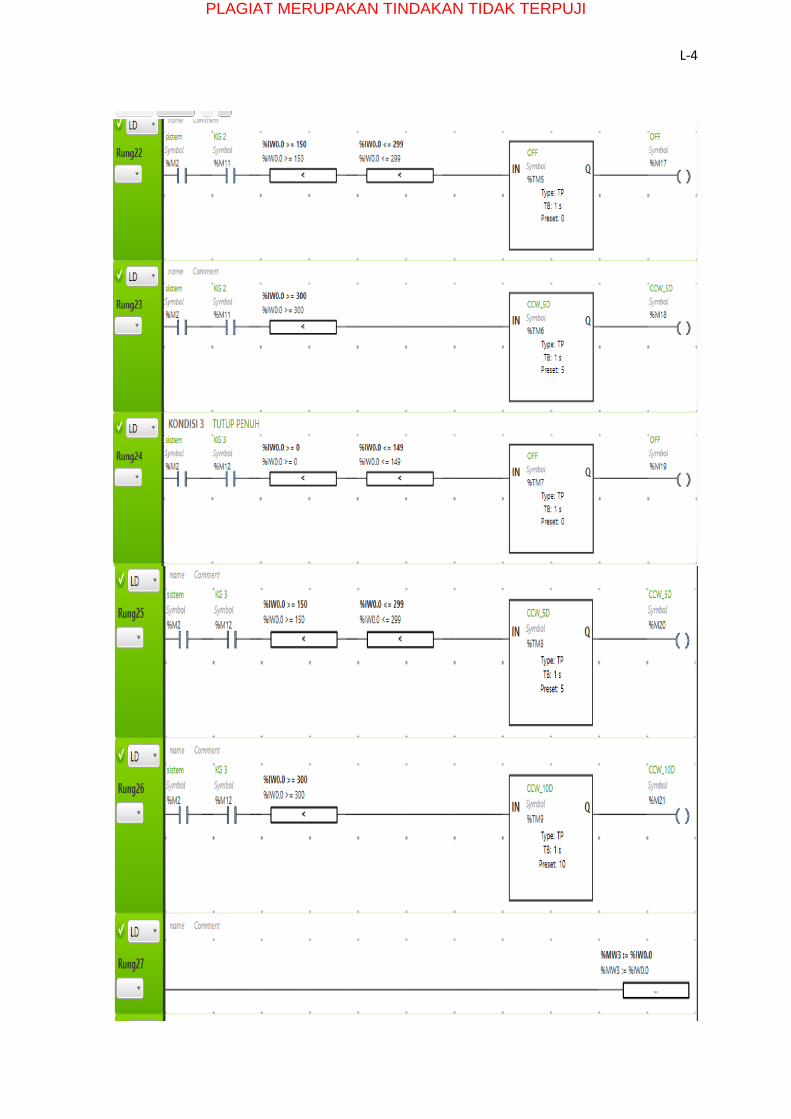
L-4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-6
Lampiran 2. Komunikasi Ethernet
Pada bagian ini akan dibahas mengenai sistem komunikasi antara PLC dengan HMI
melalui ethernet. Adapun tahap-tahap yang dilakukan adalah sebagai berikut :
Konfigurasi I/O Server Pada MBENET
Mbenet berfungsi untuk menghubungkan alamat I/O maupun memori antara PLC
dengan HMI. Berikut langkah-langkah yang dilakukan supaya komunikasi antara PLC dan
HMI dapat berjalan dengan baik :
1. Buka aplikasi MBENET.
2. Pilih topic definition pada menu configure yang terdapat pada pojok kiri atas, seperti
pada gambar lampiran 1.
Gambar Lampiran 1
3. Kemudian akan terlihat definisi topik yang sudah pernah dibuat atau kosong jika belum
pernah membuat. Terdapat beberapa opsi yang dapat digunakan yaitu membuat topik
definisi baru, memodifikasi topik definisi yang sudah ada, dan menghapus topik
definisi. Dapat dilihat pada gambar lampiran 2.
Gambar Lampiran 2
4. Selanjutnya lakukan pengaturan seperti pada gambar lampiran 3 dengan topic name
sesuai keinginan masing-masing dan alamat ip yang digunakan adalah alamat ip pada
PLC.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
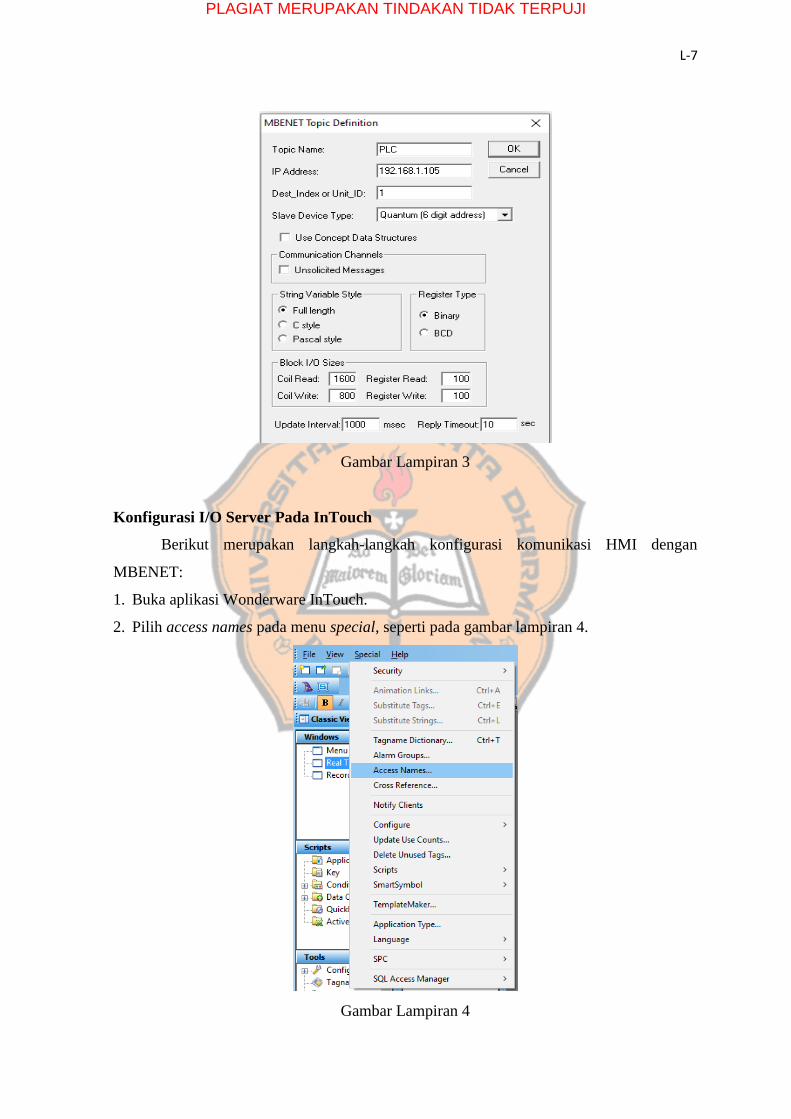
L-7
Gambar Lampiran 3
Konfigurasi I/O Server Pada InTouch
Berikut merupakan langkah-langkah konfigurasi komunikasi HMI dengan
MBENET:
1. Buka aplikasi Wonderware InTouch.
2. Pilih access names pada menu special, seperti pada gambar lampiran 4.
Gambar Lampiran 4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-8
3. Akan terlihat tampilan nama access names yang sudah pernah dibuat sebelumnya dan
akan terlihat kosong jika belum pernah dibuat. Terdapat beberapa opsi yaitu
membuat/menambahkan access names baru, memodifikasi access names, dan
menghapus access names. Dapat dilihat pada gambar lampiran 5.
Gambar Lampiran 5
4. Selanjutnya lakukan pengaturan seperti pada gambar lampiran 6 dengan nama access
sesuai dengan yang diinginkan dan nama topik sesuai dengan yang sudah dibuat pada
MBENET.
Gambar Lampiran 6
Konfigurasi Alamat IP Pada PLC
Komunikasi antara PLC dengan komputer dilakukan melalui jaringan ethernet.
supaya PLC dapat melakukan komunikasi dengan komputer, maka perlu dilakukan
pengaturan alamat ip pada aplikasi SoMachineBasic seperti berikut :
1. Buka aplikasi SoMachineBasic.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
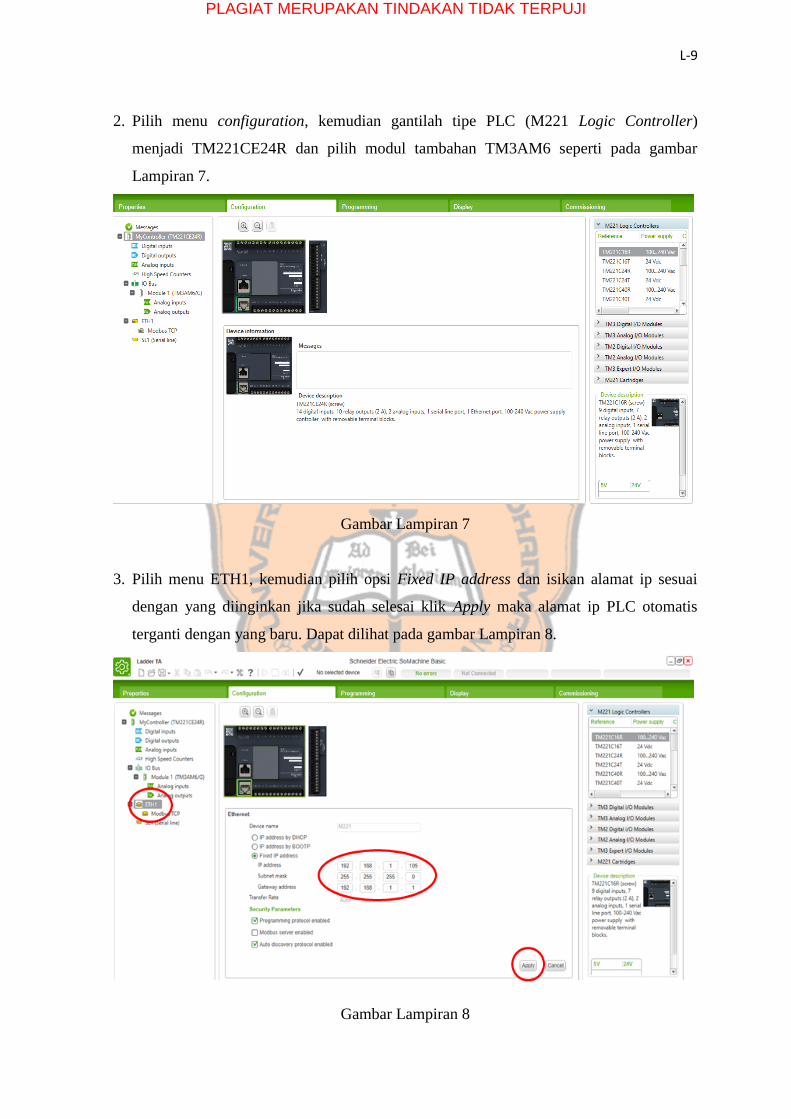
L-9
2. Pilih menu configuration, kemudian gantilah tipe PLC (M221 Logic Controller)
menjadi TM221CE24R dan pilih modul tambahan TM3AM6 seperti pada gambar
Lampiran 7.
Gambar Lampiran 7
3. Pilih menu ETH1, kemudian pilih opsi Fixed IP address dan isikan alamat ip sesuai
dengan yang diinginkan jika sudah selesai klik Apply maka alamat ip PLC otomatis
terganti dengan yang baru. Dapat dilihat pada gambar Lampiran 8.
Gambar Lampiran 8
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
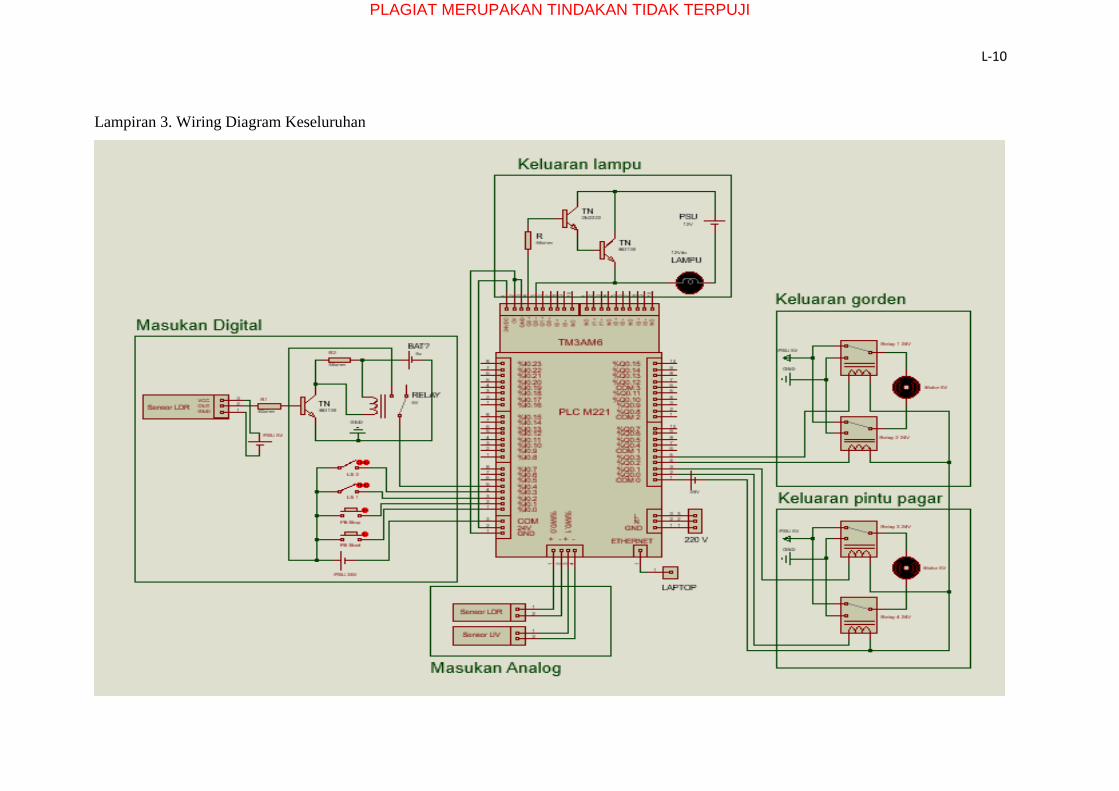
L-10
Lampiran 3. Wiring Diagram Keseluruhan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI