perancangan robot mobil kontrol bluetooth
DESCRIPTION
perancangan dasar (proposal) untuk tugas akhir. code dan circuit diagram akan menyusulTRANSCRIPT
BAB I
PENDAHULUAN
1.1 LATAR BELAKANG MASALAH
Di era modern seoerti ini banyak sekali gadget yang memiliki
system smart atau yang biasa disebut dengan smartphone. Pada
dasrnya masyarakat modern menggunakan gadget bermerk sebagai
gaya hidup. Rata-rata orang jaman sekarang menggunakan gadget
android hanya untuk mengirim pesan, social media, dan telephone. Hal
ini yang membuat keprihatinan bahwa sebenarnya android memiliki
fungsi lain diluar itu.
Dari website android developer dapat diketahui bahwa saat ini
jumlah penggina android di dunia semakin meningkat. Hampir 70%
masyarakat dunia menggunakan android sebagai gadget mereka.
Namun Rata-rata orang jaman sekarang menggunakan gadget android
hanya untuk mengirim pesan, social media, dan telephone. Dan mereka
belum menyadari mereka bisa untuk meningkatkan kemudahan, dan
kecanggihan lain di dunia dan sangat bermanfaat untuk hal sehari-hari
dan hal-hal tertentu dalam hidup.
Saat menggunakan aplikasi Bluetooth , orang hanya
menggunakannya untuk saling bertukar data, namun sekarang
Bluetooth tidak hanya digunakan untuk berkomunikasi kepada
telephone atau computer saja, tetapi juga bisa untuk memerintahkan
sebuah alat sesuai kebutuhan penggunannya. Khususnya orang-orang
yang suka dan memiliki hobi dalam bidang robotika. Kita dapat
memberikan perintah gerak kepada robot kita dengan bantuan
Bluetooth pada cellphone.
Oleh sebab itu perlu adanya pengembangan inovasi teknologi
khususnya dengan memanfaatkan cellphone atau gadget yang sudah
dimiliki. Maka dari itu kami tertarik untuk membuat alat dengan
1
memanfaatkan teknologi Bluetooth yaitu, “Bluetooth Control Wheeled Robot
Based On Microcontroller Atmega 16”.
1.2 RUMUSAN MASALAH
Dari latar belakang yang telah diuraikan di atas, dapat dirumuskan
permasalahan sebagai berikut :
1. Bagaimana cara merancang alat pengontol jarah jauh pada
robot secara otomatis bebasis Bluetooth?
2. Bagaimana cara membuat robot yang bisa dikontrol jarak jauh
dengan Bluetooth?
1.3 TUJUAN
Tujuan dari pelaksanaan ini adalah :
1. Untuk mengetahui cara merancang alat pengontol jarah jauh
pada robot secara otomatis bebasis Bluetooth
2. Untuk mengetahui cara membuat robot yang bisa dikontrol
jarak jauh dengan Bluetooth.
1.4 MANFAAT
Design Project ini diharapkan dapat bermanfaat sebagai berikut :
1. Dapat diaplikasikan dalam dunia robotika
2. Menambah pengetahuan bahwa alat
1.5 BATASAN MASALAH
Batasan masalah yang terdapat pada penyusunan design project ini
adalah sebagai berikut :
1. Alat yang akan dibuat hanya bisa dikontrol sejauh jarak jangkau
bluetooth
2
BAB II
LANDASAN TEORI
2.1 Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu serpih (chip).
Mikrokontroler lebih dari sekedar sebuah mikroprosesor karena sudah terdapat atau
berisikan ROM (Read-Only Memory), RAM (Read-Write Memory), beberapa bandar
masukan maupun keluaran, dan beberapa peripheral seperti pencacah/pewaktu, ADC
(Analog to Digital converter), DAC (Digital to Analog converter) dan serial komunikasi.
Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR.
AVR adalah mikrokontroler RISC (Reduce Instuction Set Compute) 8 bit berdasarkan
arsitektur Harvard. Secara umum mikrokontroler AVR dapat dapat dikelompokkan
menjadi 3 kelompok, yaitu keluarga AT90Sxx, ATMega dan ATtiny. Pada dasarnya yang
membedakan masing-masing kelas adalah memori, peripheral, dan fiturnya Seperti
mikroprosesor pada umumnya, secara internal mikrokontroler ATMega16 terdiri atas unit-
unit fungsionalnya Arithmetic and Logical Unit (ALU), himpunan register kerja, register
dan dekoder instruksi, dan pewaktu beserta komponen kendali lainnya. Berbeda dengan
mikroprosesor, mikrokontroler menyediakan memori dalam serpih yang sama dengen
prosesornya (in chip).
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan memori
program dari memori data, baik bus alamat maupun bus data, sehingga pengaksesan
program dan data dapat dilakukan secara bersamaan (concurrent). Secara garis besar
mikrokontroler ATMega16 terdiri dari :
3

1. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16Mhz. 1.
Memiliki kapasitas Flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM 1Kbyte
2. Saluran I/O 32 buah, yaitu Bandar A, Bandar B, Bandar C, dan Bandar D. 3. CPU
yang terdiri dari 32 buah register. 2. User interupsi internal dan eksternal
3. Bandar antarmuka SPI dan Bandar USART sebagai komunikasi serial
4. Fitur Peripheral
Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode compare
Satu buah 16-bit timer/counter dengan prescaler terpisah, mode compare, dan
mode capture
Real time counter dengan osilator tersendiri
Empat kanal PWM dan Antarmuka komparator analog
8 kanal, 10 bit ADC
Byte-oriented Two-wire Serial Interface
Watchdog timer dengan osilator internal
4
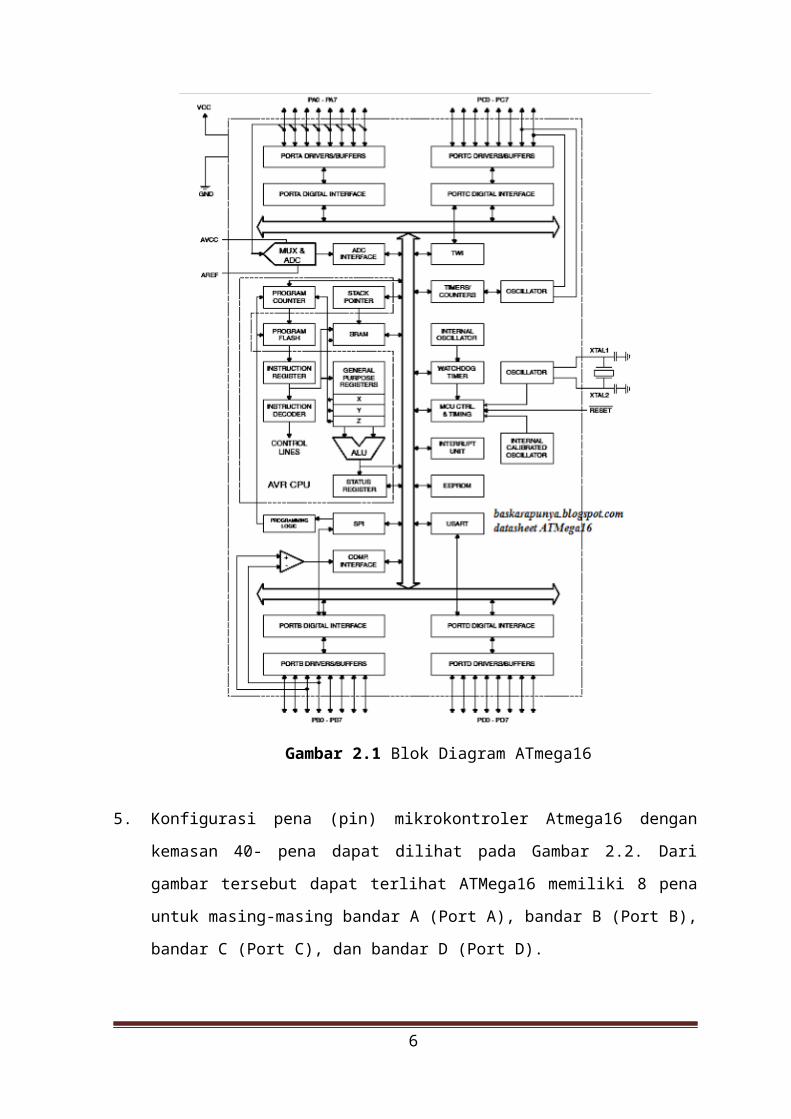
Gambar 2.1 Blok Diagram ATmega16
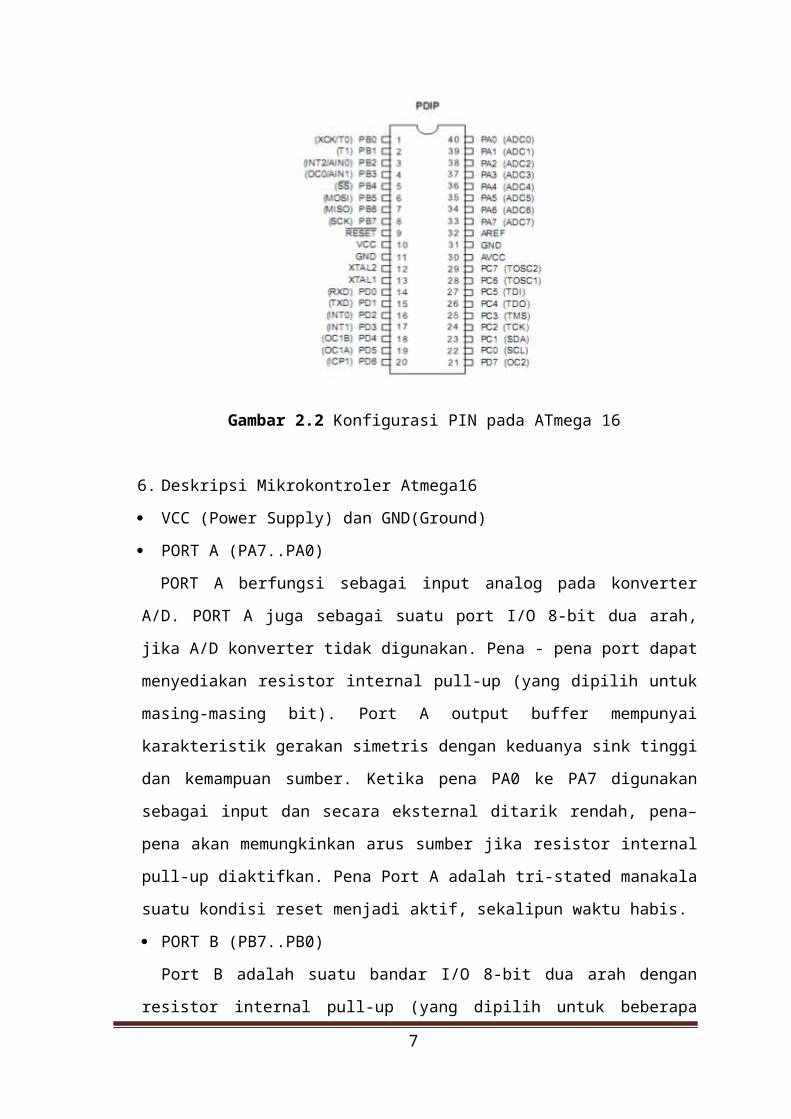
5. Konfigurasi pena (pin) mikrokontroler Atmega16 dengan kemasan 40- pena dapat
dilihat pada Gambar 2.2. Dari gambar tersebut dapat terlihat ATMega16 memiliki 8
pena untuk masing-masing bandar A (Port A), bandar B (Port B), bandar C (Port C),
dan bandar D (Port D).
5
Gambar 2.2 Konfigurasi PIN pada ATmega 16
6. Deskripsi Mikrokontroler Atmega16
VCC (Power Supply) dan GND(Ground)
PORT A (PA7..PA0)
PORT A berfungsi sebagai input analog pada konverter A/D. PORT A juga sebagai
suatu port I/O 8-bit dua arah, jika A/D konverter tidak digunakan. Pena - pena port
dapat menyediakan resistor internal pull-up (yang dipilih untuk masing-masing bit).
Port A output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink
tinggi dan kemampuan sumber. Ketika pena PA0 ke PA7 digunakan sebagai input dan
secara eksternal ditarik rendah, pena–pena akan memungkinkan arus sumber jika
resistor internal pull-up diaktifkan. Pena Port A adalah tri-stated manakala suatu
kondisi reset menjadi aktif, sekalipun waktu habis.
PORT B (PB7..PB0)
Port B adalah suatu bandar I/O 8-bit dua arah dengan resistor internal pull-up (yang
dipilih untuk beberapa bit). Port B output buffer mempunyai karakteristik gerakan
simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pena.
Port B yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up
diaktifkan. Pena Port B adalah tri-stated manakala suatu kondisi reset menjadi aktif,
sekalipun waktu habis.
PORT C (PC7..PC0)
6
Port C adalah suatu port I/O 8-bit dua arah dengan resistor internal pull-up (yang
dipilih untuk beberapa bit). Port C output buffer mempunyai karakteristik gerakan
simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pena
port C yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up
diaktifkan. Pena port C adalah tri-stated manakala suatu kondisi reset menjadi aktif,
sekalipun waktu habis.
PORT D (PD7..PD0)
Port D adalah suatu port I/O 8-bit dua arah dengan resistor internal pull-up (yang
dipilih untuk beberapa bit). Port D output buffer mempunyai karakteristik gerakan
simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pena
port D yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up
diaktifkan. Pena port D adalah tri-stated manakala suatu kondisi reset menjadi aktif,
sekalipun waktu habis.
RESET (Reset input)
XTAL1 (Input Oscillator)
XTAL2 (Output Oscillator)
AVCC adalah pena penyedia tegangan untuk bandar A dan Konverter A/D.
AREF adalah pena referensi analog untuk konverter A/D.
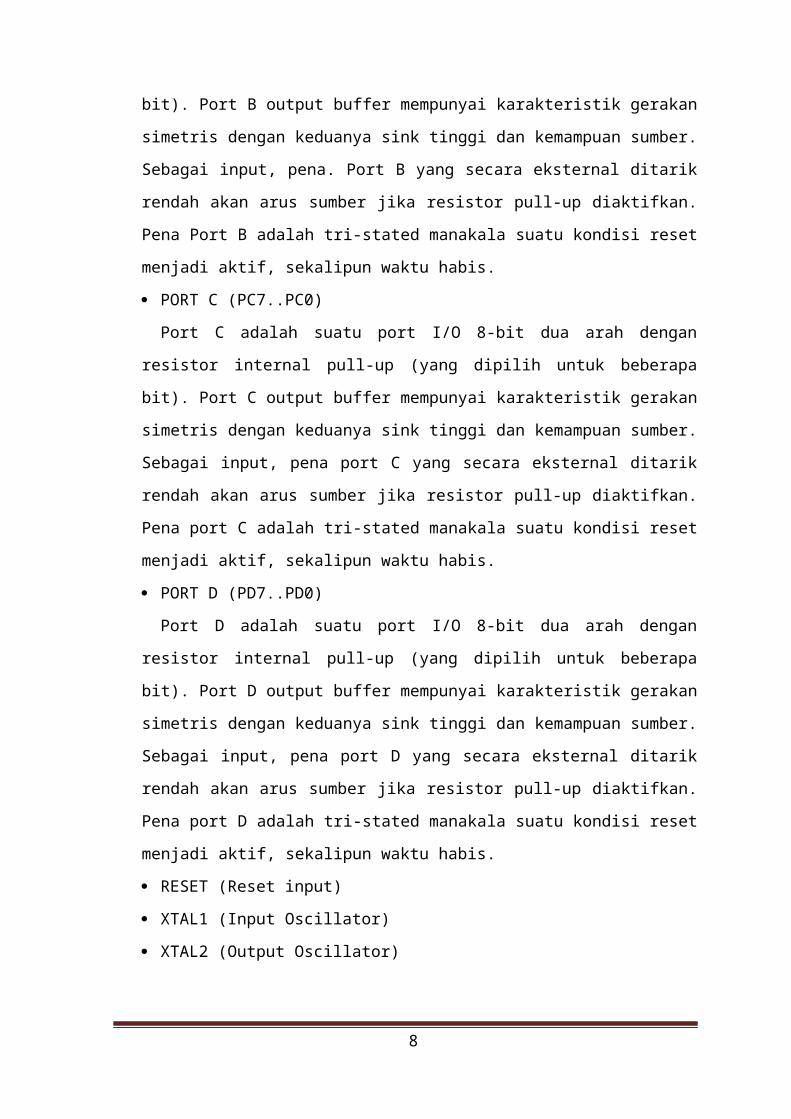
2.2 DC TT Motor
Merupakan motor DC 3-6V berukuran kecil namun memiliki torsi menegah sampai
9Kg pada tegangan input 6V DC.
Gambar 2.3 DC TT Motor
7
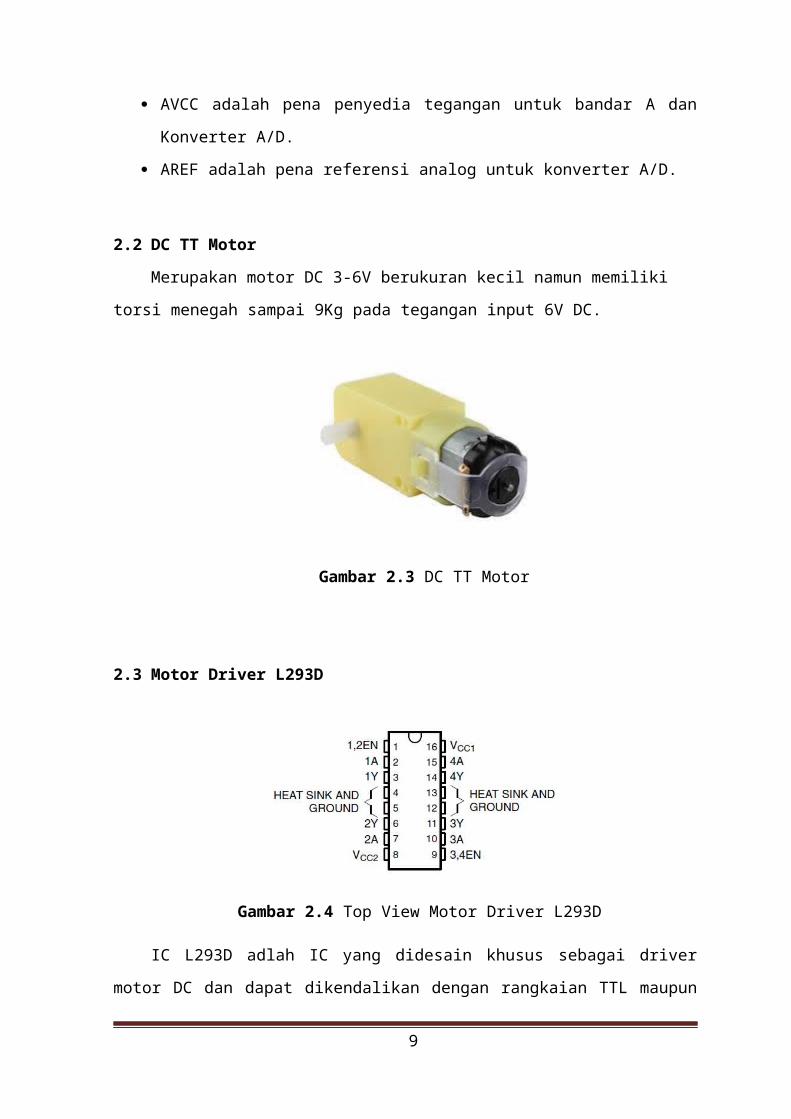
2.3 Motor Driver L293D
Gambar 2.4 Top View Motor Driver L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat
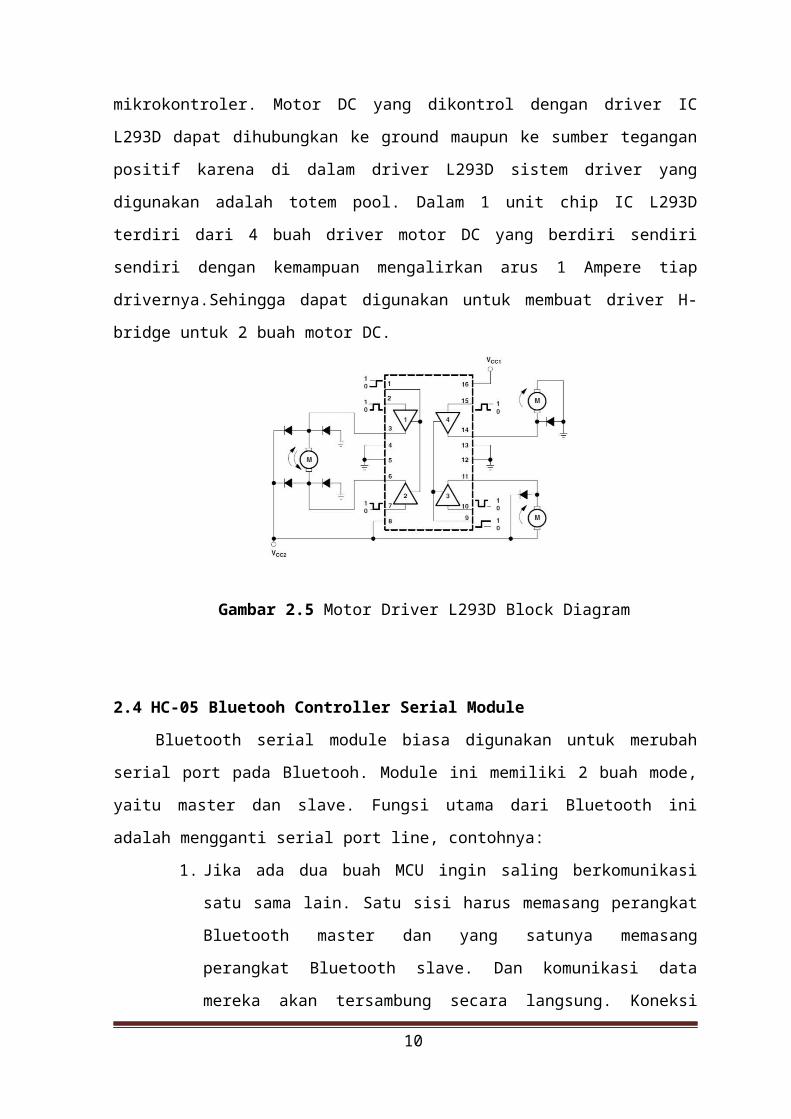
dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol
dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif
karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1
unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan
kemampuan mengalirkan arus 1 Ampere tiap drivernya.Sehingga dapat digunakan untuk
membuat driver H-bridge untuk 2 buah motor DC.
Gambar 2.5 Motor Driver L293D Block Diagram
2.4 HC-05 Bluetooh Controller Serial Module
Bluetooth serial module biasa digunakan untuk merubah serial port pada Bluetooh.
Module ini memiliki 2 buah mode, yaitu master dan slave. Fungsi utama dari Bluetooth ini
adalah mengganti serial port line, contohnya:
1. Jika ada dua buah MCU ingin saling berkomunikasi satu sama lain. Satu sisi
harus memasang perangkat Bluetooth master dan yang satunya memasang
8
perangkat Bluetooth slave. Dan komunikasi data mereka akan tersambung
secara langsung. Koneksi Bluetooth ini sangat ekivalen pada serial port line
seperti sinyal RxD dan TxD.
2. Persyaratan pada komunikasi ini memiliki 2 syarat, diantaranya harus ada
device yang menjadi slave dan ada yang menjadi master. Lalu kata kunci
sambungan Bluetooth haruslah benar.
Gambar 2.6 Figure HC-05 Bluetooh Controller Serial Module
9
BAB III
METODE PERANCANGAN
3.1 Cara Kerja Sistem Perancangan
Smartphone berfungsi sebagai pengirim perintah control arah
gerak dengan mengirim data Bluetooth dalam system aplikasi control
Bluetooth. Didalamnya sudah diberikan data logika yang akan
dikirimkan melalui HC-05 dan masuk kedalam system microcontroller.
Microcontroller akan bekerja berdasarkan alur perangkat lunak. Data
yang sudah diolah oleh microcontroller akan membuat keluaran pada
PORT berlogika dan memberikan data kepada driver motor L293D, lalu
driver motor akan menentukan arah putar DC TT motor
3.2 Perancangan dan Pembuatan Software
(Flowchart)
3.3 Spesifikasi Perancangan
Setiap alat pasti mempunyai spesifikasi yang berbeda-beda,
spesifikasi ada 2 jenis yaitu spesifikasi elektronik dan spesifikasi
mekanik. Berikut spesifikasinya :
10
3.3.1 Spesifikasi Elektronik
- Menggunakan daya 12V/5A
- AVR Studio 4
- Mikrokontroller ATmega16
- Driver Motor L293D
- Motor DC TT 5V
3.3.2 Spesifikasi Mekanik
- USB Downloader (alat yang digunakan untuk memasukkan
program ke mikrokontroller
- Handphone
- Ban Robot
11
BAB IV
BIAYA DAN JADWAL KEGIATAN
4.1 Daftar komponen dan Anggaran Biaya
N NAMA JUMLAH SATUAN HARGA(Rp) TOTAL (Rp)
1 ATMEGA 16 1 Buah 46000 46000
2 PCB POLOS 1 Buah 4000 4000
3 Timah 5 Meter 2000 10000
4 Jumper Male 14 Buah 1500 12000
5 Dioda 16 Buah 300 4800
6 HC-05 1 Buah 110000 110000
7 4WD Chassis 1 Buah 325000 325000
8 L293D 2 Buah 15000 30000
TOTAL :
4.2 Jadwal Kegiatan
No Kegiatan Bulan 1 Bulan 2 Bulan 3 Bulan 4 Bulan 5
1 Studi Literatur
2 Perencanaan System
Percobaan system
elektronik
Percobaan system mekanik
Perakitan system mekanik
Perakitan Komponen
elektronik
Perakitan komponen
mekanik
3 Tahap pembuatan dan
pengumpulan alat
12

Laporan akhir percobaan
DAFTAR RUJUKAN
13