perancangan alat deteksi letak kebocoran pipa …digilib.unila.ac.id/22273/6/skripsi tanpa bab...
TRANSCRIPT

PERANCANGAN ALAT DETEKSI LETAK KEBOCORAN PIPA PVC MENGGUNAKAN SENSOR FLOWMETER MODEL FS300A
BERBASIS TCP/IP
(Skripsi)
Oleh
Duwi Hariyanto 1217041014
JURUSAN FISIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS LAMPUNG 2016

i
ABSTRAK
PERANCANGAN ALAT DETEKSI LETAK KEBOCORAN PIPA PVC MENGGUNAKAN SENSOR FLOWMETER MODEL FS300A
BERBASIS TCP/IP
Oleh
Duwi Hariyanto
Kebocoran jaringan pipa air dapat menyebabkan kerugian finansial yang besar bagi pihak pengguna sistem perpipaan. PDAM umumnya menggunakan metode manual untuk mendeteksi letak kebocoran pipa, seperti dengan melihat secara kasat mata jika terjadi genangan air yang berada diatas jaringan pipa. Penelitian bertujuan untuk menghasilkan metode guna merancang alat yang dapat mendeteksi letak kebocoran pipa secara cepat dan akurat. Metode dilakukan dengan menggunakan dua buah sensor flowmeter yang ditempatkan sebelum dan sesudah titik kebocoran pipa untuk merekam data selisih debit air masuk dan keluar (ΔQ). Data hasil ditransmisikan ke komputer menggunakan jaringan berbasis TCP/IP. Hasil yang diperoleh menunjukkan bahwa semakin kecil nilai selisih debit air masuk dan keluar (ΔQ) maka akan semakin jauh letak kebocoran pipa (X). Penurunan besar diameter lubang bocor (D) sebesar 43% mengakibatkan penurunan nilai selisih debit air masuk dan keluar (ΔQ) sebesar 21%. Berdasarkan hasil tersebut disimpulkan bahwa alat deteksi letak kebocoran pipa menggunakan teknologi sensor flowmeter dapat membedakan letak titik kebocoran pada pipa air secara akurat dan efektif.
Kata kunci: kebocoran, debit air, sensor flowmeter, TCP/IP, WIZ110SR

ii
ABSTRACT
DESIGN OF DEVICE FOR DETECTING PIPELINE LEAK LOCATION USE WATER FLOW SENSOR FS300A AND TCP/IP
By
Duwi Hariyanto
Pipeline leaks can cause major financial losses for the users of pipeline system. PDAM generally uses manual methods to detect leak location, such as by looking puddle above the pipeline. The research proposed to produce a method to design device that can detect pipeline leak location quickly and accurately. The method use water flow sensors that are placed before and after the leak. The water flow sensors are used to record data of the difference between incoming and outgoing water flow (ΔQ). The data are transmitted to a computer using a network based on TCP/IP. The results showed that the smaller value of the difference between incoming and outgoing water flow (ΔQ), the farther distance leak location (X). If diameter hole (D) had decreased by 43%, the value of the difference between incoming and outgoing water flow (ΔQ) would have decreased by 21%. Based on these results, the device for detecting pipeline leak location with technology water flow sensor can distinguish pipeline leak location accurately and effectively.
Keywords: leak, water flow, water flow sensor, TCP/IP, WIZ110SR
iii
PERANCANGAN ALAT DETEKSI LETAK KEBOCORAN PIPA PVC MENGGUNAKAN SENSOR FLOWMETER MODEL FS300A
BERBASIS TCP/IP
Oleh
DUWI HARIYANTO
Skripsi
Sebagai Salah Satu Syarat untuk Memperoleh Gelar SARJANA SAINS
Pada
Jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam
JURUSAN FISIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS LAMPUNG BANDAR lAMPUNG
2016

iv
Judul Skripsi : Perancangan Alat Deteksi Letak Kebocoran Pipa PVC Menggunakan Sensor Flowmeter Model FS300A Berbasis TCP/IP
Nama Mahasiswa : Duwi Hariyanto
Nomor Pokok Mahasiswa : 1217041014
Jurusan : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
MENYETUJUI 1. Komisi Pembimbing
Gurum Ahmad Pauzi, S.Si., M.T. Drs. Amir Supriyanto, M.Si. NIP. 19801010 200501 1 002 NIP. 19650407 199111 1 001
2. Ketua Jurusan Fisika FMIPA
Dr. Yanti Yulianti, S.Si., M.Si. NIP. 19751219 200012 2 003
v
MENGESAHKAN
1. Tim Penguji
Ketua : Gurum Ahmad Pauzi, S.Si., M.T. ........................
Sekretaris : Drs. Amir Supriyanto, M.Si. ........................
Penguji
Bukan Pembimbing : Prof. Dr. Warsito, S.Si., D.E.A. ........................
2. Dekan Fakultas Matematikan dan Ilmu Pengetahuan Alam
Prof. Dr. Warsito, S.Si., D.E.A. NIP. 19710212 199512 1 001
Tanggal Lulus Ujian Skripsi :

vi
PERNYATAAN
Dengan ini saya menyatakan bahwa skripsi ini terdapat karya yang pernah
dilakukan orang lain, dan sepanjang pengetahuan saya tidak ada karya atau
pendapat ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis diacu
dalam naskah ini sebagaimana disebutkan dalam daftar pustaka. Selain itu, saya
menyatakan pula bahwa skripsi ini dibuat oleh saya sendiri.
Apabila pernyataan ini tidak benar, maka saya bersedia dikenakan sangsi sesuai
dengan hukum yang berlaku.
Bandarlampung, 25 April 2016
Duwi Hariyanto NPM.1217041014

vii
Penulis bernama lengkap Duwi Hariyanto. Laki-laki yang
dilahirkan di Bandarlampung pada tanggal 8 Juli 1994
menyelesaikan pendidikan Sekolah Dasar di SD N 5 Sumberejo
Kemiling Bandar Lampung pada tahun 2006, Sekolah
Menengah Pertama di SMP N 14 Bandar Lampung pada tahun 2009, Sekolah
Menengah Atas di SMA N 14 Bandar Lampung pada tahun 2012.
Duwi Hariyanto, terdaftar sebagai mahasiswa di Jurusan Fisika FMIPA
Universitas Lampung melalui SNMPTN UNDANGAN tahun 2012. Penulis
merupakan mahasiswa penerima bantuan biaya pendidikan Bidik Misi angkatan
2012. Selama menempuh pendidikan, pernah menjadi Koordinator Asisten
Praktikum Fisika Dasar I, Pemrograman Komputer, Elektronika Dasar I dan II,
dan Fisika Eksperimen. Penulis pernah aktif dalam kegiatan organisasi seperti
menjadi anggota Bidang Sains dan Teknologi Himpunan Mahasiswa Fisika
(HIMAFI) Jurusan Fisika FMIPA Unila periode 2013-2014, dan Ketua Umum
Physics Instrument Club (PIC) Jurusan Fisika FMIPA Unila periode 2015.
Prestasi yang pernah diraih penulis adalah Peringkat 1 Olimpiade Sains Nasional
(OSN) Pertamina Fisika Tingkat Provinsi tahun 2013, Peringkat 2 OSN Pertamina
Fisika Tingkat Provinsi tahun 2015, Peringkat 3 Mahasiswa Berprestasi FMIPA
Unila tahun 2015, Peserta Olimpiade Nasional MIPA Perguruan Tinggi Tahap II
tahun 2014 dan 2015, dan Ketua Tim Penelitian penerima hibah Program
Kreatifitas Mahasiswa-Penelitian (PKM-P) tahun 2014.

viii
PERSEMBAHAN
Dari hati yang terdalam, skripsi ini sepenuhnya aku persembahkan untuk
Kedua orang tuaku, Rosidi dan Ilham Turiha Orangtua terbaik sepanjang masa yang senantiasa mendoakan dan
memotivasi untuk kesuksesanku
My Sister and My Brother Ika Hawiji, S.Pd. dan Trio Herwansyah
Keluarga Besarku yang selalu mendukung untuk kesuksesanku
My Zing, Fatia Ulfah Partner terbaik yang selalu menjadi motivasiku
untuk menjadi yang terbaik
Universitas Lampung Almamaterku tercinta

ix
MOTTO
“… Alloh will rise up, to suitable ranks and degrees, those of you who believe and who have been granted knowledge …”
(Q.S. Al-Mujadalah: 11)
And remember! Your Lord caused to be declared (publicly): “If ye are grateful, I will add more (favours) unto you; but if ye show
ingratitude, truly My punishment is terrible indeed” (Q.S. Ibrahim: 7)
Is there any reward for good other than good (Q.S. Ar-Rahman: 60)
Ikhtiar, do’a, tawakal
Hasil itu penting, namun parameter sukses itu dinilai dari proses

x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Alloh SWT yang telah memberikan
kemurahan, hidayah, dan karunia-Nya kepada penulis, sehingga penulis dapat
menyelesaikan skripsi berjudul Perancangan Alat Deteksi Letak Kebocoran Pipa
PVC Menggunakan Sensor Flowmeter Model FS300A Berbasis TCP/IP.
Skripsi ini menyajikan metode perancangan alat deteksi letak kebocoran pipa
berdasarkan analisis debit air menggunakan dua buah sensor flowmeter yang
ditempatkan sebelum dan sesudah titik kebocoran. Sensor flowmeter digunakan
untuk merekam data selisih debit air sebelum dan sesudah titik kebocoran. Data
hasil ditransmisikan ke komputer menggunakan jaringan berbasis TCP/IP untuk
mendeteksi letak kebocoran pipa secara efisien dan akurat.
Penulis menyadari bahwa penyajian skripsi ini masih jauh dari kesempurnaan.
Oleh karena itu, penulis mengharapkan kritik dan saran yang membangun dari
berbagai pihak demi perbaikan dan penyempurnaan skripsi ini. Akhir kata,
semoga skripsi ini dapat menjadi rujukan untuk penelitian berikutnya agar lebih
sempurna dan dapat memperkaya khasanah ilmu pengetahuan.
Bandar Lampung, 15 April 2016 Penulis, Duwi Hariyanto
xi
SANWACANA
Puji syukur kehadirat Alloh SWT Yang Maha Kuasa lagi Maha Berkehendak, atas
segala limpahan rahmat, taufik serta hidayah-Nya sehingga penulis dapat
menyelesaikan penelitian dan skripsi ini sesuai dengan waktu yang telah
direncanakan. Shalawat serta salam semoga senantiasa tercurahkan kepada
baginda Rosululloh Muhammad SAW beserta seluruh keluarga dan sahabatnya
yang tanpa perjuangan beliau penulis mungkin masih terjerat tali kebodohan.
Dalam menyusun skripsi ini penulis tidak pernah lepas dari bantuan semua pihak.
Oleh karena itu penulis ucapkan terima kasih kepada.
1. Direktorat Jendral Pendidikan Tinggi (Ditjen Dikti) melalui programnya, yaitu
bantuan biaya pendidikan BIDIK MISI, penulis dapat menyelesaikan
pendidikan S1 di Universitas Lampung.
2. Kedua orang tua tercinta yang selalu memberikan doa, kasih sayang dan
pengorbanan dengan ikhlas sampai saat ini.
3. Bapak Gurum Ahmad Pauzi, S.Si., M.T. selaku pembimbing 1 yang telah
memberikan ilmu, motivasi, dan bimbingan kepada penulis sehingga dapat
menyelesaikan penelitian dan skripsi ini.
4. Bapak Drs. Amir Supriyanto, M.Si. selaku pembimbing akademik dan
pembimbing 2 yang telah memberikan ilmu, motivasi, bimbingan dan
arahannya kepada penulis dalam menjalani proses perkuliahan dan skripsi.

xii
5. Bapak Prof. Dr. Warsito, S.Si., D.E.A. selaku penguji dan Dekan Fakultas
Matematika dan Ilmu pengetahuan Alam Universitas Lampung yang telah
memberikan ilmu, waktu, dan bimbingannya kepada penulis sehingga dapat
menyelesaikan skripsi ini.
6. Ibu Dr.Yanti Yulianti, M.Si. sebagai Ketua Jurusan Fisika Fakultas
Matematika dan Ilmu pengetahuan Alam Universitas Lampung.
7. Bapak Arif Surtono, M.Si., M.Eng. sebagai Sekretaris Jurusan Fisika Fakultas
Matematika dan Ilmu pengetahuan Alam Universitas Lampung.
8. Fatia Ulfah as my zing, yang memberi semangat dan motivasi penulis dalam
menyelesaikan perkulihan, memenangkan perlombaan, dan penyusunan
skripsi ini.
9. Teman-teman 9 BIT, Ma’sum, Jovi, Kuswanto, Irsan, Giri, Iqbal, Randha, Tri,
dan teman-teman yang lainnya fisika 2012 yang belum disebutkan satu persatu
yang telah berbagi keceriaan, kebersamaan, kebahagiaan, dan kisah hidup
yang penulis dapatkan selama kuliah.
10. Kakak-kakak dan adik-adik Kak Fat’hul Bari, Kak Sammy, Mbak Nawira,
Agung, Arta, Yulian adik-adik HIMAFI, dan PIC Fisika FMIPA Unila tercinta
yang memberikan kepercayaan diri kepada penulis serta telah sangat
membantu dalam penyelesaian penelitian dan skripsi ini.
Semoga Alloh SWT senantiasa memberikan rahmat dan hidayah-Nya, serta
mencatat kebaikan kita menjadi suatu nilai ibadah, Amin.

xiii
DAFTAR ISI
Halaman ABSTRAK .................................................................................................... i
ABSTRACT ................................................................................................. ii
HALAMAN JUDUL .................................................................................... iii
HALAMAN PENGESAHAN ...................................................................... iv
HALAMAN MENGESAHKAN .................................................................. v
PERNYATAAN ........................................................................................... vi
RIWAYAT HIDUP ...................................................................................... vii
PERSEMBAHAN ........................................................................................ viii
MOTTO ....................................................................................................... ix
KATA PENGANTAR .................................................................................. x
SANWACANA ............................................................................................. xi
DAFTAR ISI ................................................................................................ xiii
DAFTAR GAMBAR .................................................................................... xv
DAFTAR TABEL ........................................................................................ xviii
I. PENDAHULUAN
A. Latar Belakang ................................................................................. 1 B. Rumusan Masalah ............................................................................ 4 C. Tujuan Penelitian ............................................................................. 5 D. Manfaat Penelitian ........................................................................... 5 E. Batasan Penelitian . ........................................................................... 6
II. TINJAUAN PUSTAKA
A. Penelitian Terkait ............................................................................. 7

xiv
B. Persamaan Kontinuitas ..................................................................... 18 C. Persamaan Bernoulli ........................................................................ 19 D. Metode Pengukuran Debit Air .......................................................... 21 E. Aliran Laminar dan Turbulen ........................................................... 22 F. Water Flow Sensor ¾ Inchi .............................................................. 24 G. Aturan TCP/IP Routing .................................................................... 26 H. WIZ110SR ....................................................................................... 28 I. Mikrokontroler ATmega 16 .............................................................. 29 J. Real-Time Clock (RTC) DS1307 ...................................................... 32 K. Karakteristik Alat Ukur .................................................................... 34
III. METODE PENELITIAN
A. Waktu dan Tempat Penelitian ........................................................... 37 B. Alat dan Bahan ................................................................................. 37 C. Prosedur Penelitian ........................................................................... 39
IV. PEMBAHASAN
A. Pengujian Water Flow Sensor ........................................................... 55 B. Pengujian Rangkaian dan Program Mikrokontroler .......................... 60 C. Pengujian Sensor dan Mikrokontroler ............................................... 67 D. Pengujian Letak Kebocoran Pipa ...................................................... 73 E. Analisis Data .................................................................................... 84
V. KESIMPULAN DAN SARAN
A. Kesimpulan ...................................................................................... 90 B. Saran ................................................................................................ 91
DAFTAR PUSTAKA
LAMPIRAN

xv
DAFTAR GAMBAR
Gambar Halaman 2.1 Sketsa Pengujian Kebocoran Pipa dengan DPT ................................. 7
2.2 Hasil Analisis Beda Tekanan (a) Upstream (b) Downstream ............ 8
2.3 Skema Underground Wireless Sensor Network (UWSN) untuk Sistem Monitoring Pipa ............................................................................... 9
2.4 Skema Sensor Tekanan Menggunakan Teknologi FSR ..................... 9
2.5 Sistem Pengujian Deteksi Kebocoran Pipa dengan FSR .................... 11
2.6 Penurunan Tekanan yang Disebabkan oleh Kebocoran Pipa ............. 11
2.7 Sistem Monitoring dan Deteksi Kebocoran Gas Berbasis TCP/IP ..... 12
2.8 Sistem untuk Memodelkan secara Matematis Letak Kebocoran Pipa 13
2.9 Grafik Perbandingan antara Prediksi Lokasi Lubang Relatif (Xc/L) dengan Lokasi Lubang Relatif Sebenarnya (X/L) ............................. 17
2.10 Pemodelan Aliran Tunak Masuk, dan Keluar Sebuah Tangki ........... 18
2.11 Fluida dalam Aliran Laminar Melewati Pipa yang Tertutup .............. 19
2.12 Aliran Melalui Sebuah Lubang Bebas .............................................. 21
2.13 Skema Aliran dalam Pipa ................................................................. 22
2.14 Bentuk Fisik Water Flow Sensor Model FS300A G3/4 ..................... 24
2.15 Grafik Debit Air Terhadap Keluaran Sensor Flow Meter Berupa Frekuensi ........................................................................................ 25
2.16 Aturan Dasar Routing 1 .................................................................... 26
2.17 Aturan Dasar Routing 2 .................................................................... 27
2.18 WIZ110SR ....................................................................................... 28

xvi
2.19 Konfigurasi Pin ATmega16 .............................................................. 30
2.20 Register TIMSK ............................................................................... 30
2.21 Register TCCR1B ............................................................................ 31
2.22 Register TCNT1 ............................................................................... 32
2.23 Rangkaian RTC ................................................................................ 33
3.1 Diagram Alir Penelitian .................................................................... 40
3.2 Model Sistem Pengambilan Data ...................................................... 41
3.3 Rangkaian Catu Daya ....................................................................... 42
3.4 Rangkaian RTC ................................................................................ 43
3.5 Rangkaian Komunikasi Serial menggunakan RS-232 ....................... 44
3.6 Rangkaian Sistem Minimum Mikrokontroler .................................... 44
3.7 Diagram Alir Program Mikrokontroler ATmega16 ........................... 45
3.8 Tampilan Software WIZ110SR Configuration Tool ......................... 46
3.9 Sketsa Pengujian Water Flow Sensor ................................................ 48
3.10 Sketsa Pengujian Rangkaian dan Program Mikrokontroler ............... 49
3.11 Sketsa Pengujian Sensor dan Mikrokontroler .................................... 51
3.12 Grafik Hubungan Debit yang Dideteksi Terhadap Letak Titik Kebocoran Pipa X .............................................................................................. 55
4.1 Hubungan Frekuensi Keluaran Sensor 1 dan Debit Air ..................... 57
4.2 Hubungan Frekuensi Keluaran Sensor 2 dan Debit Air ..................... 59
4.3 Rangkaian Akuisisi Data .................................................................. 60
4.4 Grafik Fungsi Kalibrasi Mikrokontroler 1 ........................................ 63
4.5 Grafik Fungsi Kalibrasi Mikrokontroler 2 ........................................ 65
4.6 Grafik Linieritas Pembecaan Frekuensi Mikrokontroler 1 ................. 65
4.7 Grafik Linieritas Pembecaan Frekuensi Mikrokontroler 2 ................. 66

xvii
4.8 Grafik Respon Sensor dan Mikrokontroler ....................................... 72
4.9 Kenaikan Debit Air yang Dideteksi Sensor 1 dengan Diameter Lubang Bocor 21 mm ................................................................................... 74
4.10 Penurunan Debit Air yang Dideteksi Sensor 2 dengan Diameter Lubang
Bocor 21 mm ................................................................................... 75 4.11 Grafik Hubungan Selisih Debit Air Masuk dan Debit Air Keluar
Terhadap Letak Kebocoran Pipa dengan Diameter Lubang Bocor 21 mm ............................................................................................... 77 4.12 Kenaikan Debit Air yang Dideteksi Sensor 1 dengan Diameter Lubang
Bocor 12 mm ................................................................................... 78 4.13 Penurunan Debit Air yang Dideteksi Sensor 2 dengan Diameter Lubang
Bocor 12 mm ................................................................................... 78 4.14 Grafik Hubungan Selisih Debit Air Masuk dan Debit Air Keluar
Terhadap Letak Kebocoran Pipa dengan Diameter Lubang Bocor 12 mm ............................................................................................... 81
4.15 Kenaikan Debit Air yang Dideteksi Sensor 1 dengan Diameter Lubang
Bocor 8 mm ..................................................................................... 82 4.16 Penurunan Debit Air yang Dideteksi Sensor 2 dengan Diameter Lubang
Bocor 8 mm ..................................................................................... 82 4.17 Grafik Hubungan Selisih Debit Air Masuk dan Debit Air Keluar
Terhadap Letak Kebocoran Pipa dengan Diameter Lubang Bocor 21 dan 12 mm ........................................................................................ 85
xviii
DAFTAR TABEL
Tabel Halaman 2.1 Densitas, Viskositas Kinematika dan Viskositas Dinamika Air ......... 23
2.2 Skala Clock Timer/Counter .............................................................. 32
3.1 Rancangan Data Pengujian Water Flow Sensor ................................ 49
3.2 Rancangan Data Pengujian Rangkaian dan Program Mikrokontroler 50
3.3 Rancangan Data Pengujian Sensor dan Mikrokontroler .................... 52
3.3 Rancangan Data Pengujian Letak Kebocoran Pipa ............................ 53
4.1 Hasil Pengujian Water Flow Sensor 1 ............................................... 56
4.2 Hasil Pengujian Water Flow Sensor 2 ............................................... 58
4.3 Hasil Pengukuran Frekuensi Menggunakan Mikrokontroler 1 Sebelum Dikalibrasi ....................................................................................... 62
4.4 Hasil Pengukuran Frekuensi Menggunakan Mikrokontroler 2 Sebelum
Dikalibrasi ....................................................................................... 64 4.5 Hasil Pengujian Sensor 1 dan Mikrokontroler 1 ................................ 68 4.6 Hasil Pengujian Sensor 2 dan Mikrokontroler 2 ................................ 70 4.7 Hasil Rata-Rata Debit Air Pipa Bocor 21 mm yang Dideteksi Sensor 1 dan Sensor 2 ..................................................................................... 76 4.8 Hasil Rata-Rata Debit Air Pipa Bocor 12 mm yang Dideteksi Sensor 1 dan Sensor 2 ..................................................................................... 79 4.9 Hasil Rata-Rata Debit Air Pipa Bocor 8 mm yang Dideteksi Sensor 1 dan Sensor 2 ..................................................................................... 83 4.10 Perbandingan Hasil Perhitungan Menggunakan Persamaan (4.6) dan
(4.14) pada Kasus Kebocoran dengan Diameter Lubang 21 mm ....... 87

xix
4.11 Perbandingan Hasil Perhitungan Menggunakan Persamaan (4.7) dan (4.13) pada Kasus Kebocoran dengan Diameter Lubang 12 mm ....... 87
1
I. PENDAHULUAN
A. Latar Belakang
Jaringan pipa merupakan sarana transportasi fluida-fluida penting seperti air
minyak, dan gas. Kebocoran jaringan pipa dapat menyebabkan kerugian
finansial yang besar bagi pihak pengguna sistem perpipaan, seperti PDAM
Way Rilau Bandarlampung. Berdasarkan data PDAM Way Rilau
Bandarlampung bulan Februari 2015 didapatkan bahwa tingkat kebocoran pada
proses distribusi sebesar 39,3%. Hal ini dapat dilihat dari perbedaan antara
jumlah air bersih yang didistribusikan oleh PDAM Way Rilau Bandarlampung
dengan jumlah air yang terjual kepada pelanggan. Total kapasitas produksi
PDAM Way Rilau Bandarlampung sebesar 1.426.825 m3 dengan jumlah air
yang didistribusikan sebesar 1.288.185 m3. Sedangkan jumlah air yang dijual
kepada pelanggan hanya sebesar 781.114 m3, jadi kehilangan air mencapai
39,3% yaitu sebesar 507.071 m3 (PDAM Way Rilau Bandarlampung, Februari
2015). Angka kebocoran ini melebihi batas pada kriteria desain yang
ditetapkan oleh Dirjen Cipta Karya tahun 1988 sebesar 15-30%.
Tingkat kebocoran tersebut terdiri dari kebocoran fisik dan nonfisik.
Kebocoran fisik adalah kebocoran yang disebabkan oleh bocornya pipa dan

2
perlengkapannya. Sedangkan kebocoran nonfisik adalah kebocoran yang
disebabkan oleh pencurian air, sambungan liar, pembacaan meter yang tidak
benar, dan akurasi meter yang rendah.
Dalam mendeteksi kebocoran pipa, PDAM umumnya masih menggunakan
sistem manual, yaitu dengan melihat secara kasat mata jika terjadi genangan air
yang berada diatas saluran pipa PDAM, atau dari laporan masyarakat tentang
adanya kebocoran atau tidak mengalirnya air di rumah mereka sedangkan
menurut data distribusi pasokan air cukup tersedia. Dari laporan tersebut
ditindaklanjuti dengan turun ke lapangan secara langsung untuk melihat
kondisi di lapangan. Akan tetapi cara ini merupakan cara yang memakan waktu
yang lama, karena suatu jaringan pipa bisa saja mencakup area yang cukup luas
dan kompleks.
Di era kemajuan teknologi ini, bukan hal yang tidak mungkin sistem deteksi
kebocoran pipa dilakukan secara cepat dan otomatis. Hal ini didukung dengan
teori-teori fisika dan penelitian-penelitian terkait yang telah dilakukan. Santoso,
dkk. (2013) melakukan pengujian deteksi kebocoran pipa menggunakan
teknologi Differential Pressure Transducer (DPT) yang ditempatkan sebelum
dan sesudah titik kebocoran untuk merekam beda tekanan. DPT dihubungkan
dengan peralatan pengkondisi sinyal dan ADC yang menghasilkan data beda
tekanan. Dari penelitian tersebut diperoleh bahwa pada kondisi pipa bocor
menghasilkan beda tekanan lebih tinggi dibandingkan kondisi pipa tidak bocor.
Sadeghioon, et al. (2014) melakukan pengujian dengan mengembangkan
jaringan sensor wireless bawah tanah (Underground Wireless Sensor

3
Network/UWSN) berbasis Force Sensitive Resistor (FSR) untuk memantau
kebocoran pipa menggunakan jaringan nirkabel. Prinsip pengujian ini hampir
sama dengan penelitian Santoso, dkk. tersebut diatas, perbedaannya pada
deteksi beda tekanan sebelum dan sesudah titik kebocoran digunakan teknologi
Force Sensitive Resistor (FSR) dan pemantauan kondisi kebocoran pipa
menggunakan jaringan nirkabel.
Penelitian dengan objek fluida berbeda yaitu gas dilakukan oleh Kirom, dkk.
(2013) dengan memonitoring kebocoran gas berbasis TCP/IP. Dalam hal ini,
sistem deteksi kebocoran gas dikombinasikan dengan jaringan berbasis TCP/IP
yang menghasilkan sistem monitoring secara terpusat sehingga menambah
efisiensi dan kecepatan transimisi data. Secara umum metode jaringan berbasis
TCP/IP hampir sama dengan metode jaringan nirkabel, perbedaannya jaringan
berbasis TCP/IP menggunakan kabel Unshielded Twisted Pair (UTP) sebagai
media transmisi data, sedangkan jaringan nirkabel tanpa menggunakan kabel
apapun. Kelebihan metode jaringan berbasis TCP/IP dibanding metode
jaringan nirkabel terletak pada biaya pengujian yang lebih murah.
Kemudian dalam teori fisika mengenai persamaan kontinuitas untuk aliran tak
mampu-mampat, jika tidak terjadi akumulasi penambahan maupun
pengurangan fluida dalam suatu volume (wadah), laju aliran fluida yang masuk
ke dalam volume tersebut harus sama dengan laju aliran yang keluar dari
volume (Munson, dan Young, 2004). Oleh sebab itu, jika terjadi suatu
kebocoran dalam sistem distribusi fluida maka akan terjadi perbedaan antara
debit fluida masuk, dan debit fluida keluar.

4
Baghdadi dan Mansy (1988) melakukan pemodelan secara matematis dan
pengujian eksperimental untuk menentukan letak kebocoran pipa. Pengujian
eksperimental dilakukan dengan menggunakan pipa PVC yang permukaannya
halus dengan panjang 12 m dan diameter dalam 26 mm, tiga buah orifice meter
untuk mengukur debit air masuk, dan tabung pitot untuk mengukur debit air
keluar. Titik kebocoran berada pada jarak X dari alat ukur debit air masuk.
Berdasarkan hal yang dilakukannya tersebut diperoleh bahwa letak kebocoran
pipa merupakan fungsi dari debit fluida masuk dan debit fluida keluar pada
pipa.
Berdasarkan hal yang disajikan diatas, penulis melakukan suatu inovasi dengan
menggunakan dua buah sensor flowmeter yang ditempatkan sebelum dan
sesudah titik kebocoran pipa untuk merekam perbedaan debit air. Dalam hal ini,
sensor flowmeter dihubungkan dengan pengkondisi sinyal dan ADC yang
menghasilkan data beda debit air, kemudian hasil tersebut ditransmisikan ke
komputer menggunakan jaringan berbasis TCP/IP untuk mendeteksi letak
kebocoran pipa.
B. Rumusan Masalah
Rumusan masalah dalam penelitian adalah:
1 bagaimana pengaruh selisih debit air masuk dan keluar terhadap letak
kebocoran pipa ?
2 bagaimana pengaruh besar lubang kebocoran terhadap letak kebocoran
pipa ?

5
3 bagaimana kelebihan dan kekurangan sensor flowmeter model FS300A
yang diaplikasikan pada alat deteksi letak kebocoran pipa PVC berbasis
TCP/IP ?.
C. Tujuan Penelitian
Tujuan penelitian adalah:
1 mengetahui pengaruh selisih debit air masuk dan keluar terhadap letak
kebocoran pipa;
2 mengetahui pengaruh besar lubang kebocoran terhadap letak kebocoran
pipa;
3 mengetahui kelebihan dan kekurangan sensor flowmeter model FS300A
yang diaplikasikan pada alat deteksi letak kebocoran pipa PVC berbasis
TCP/IP.
D. Manfaat Penelitian
Manfaat penelitian adalah untuk merealisasikan alat yang dapat mendeteksi
letak kebocoran pipa secara cepat dan akurat menggunakan sensor flowmeter
dan transmisi data berbasis TCP/IP yang berguna untuk mengoptimalkan
sistem deteksi letak kebocoran pipa agar tidak terjadi kerugian finansial yang
besar akibat kehilangan produk fluida.

6
E. Batasan Penelitian
Batasan masalah penelitian adalah sebagai berikut.
1. Pipa yang digunakan yaitu pipa PVC berukuran ¾ inchi.
2. Pipa diletakkan dengan sudut kemiringan sebesar 1º.
3. Sensor flowmeter yang digunakan yaitu sensor flowmeter model FS300A
dengan jangkauan pengukuran 1 sampai 60 liter/menit.
4. Sensor flowmeter berjumlah dua buah dan ditempatkan sebelum dan
sesudah titik kebocoran pipa.
5. Akuisisi data berbasis mikrokontroler ATmega 16 yang diintegrasikan
dengan WIZ110SR sebagai komunikasi berbasis TCP/IP ke komputer.
6. Kebocoran buatan dilakukan dengan menggunakan lubang berdiameter 21
mm, 12 mm, dan 8 mm.
7. Kebocoran buatan hanya satu titik pada jarak yang diukur dari sensor
flowmeter sesudah titik kebocoran.

7
II. TINJAUAN PUSTAKA
A. Penelitian Terkait
1. Deteksi Kebocoran Pipa Menggunakan Prinsip Beda Tekanan
Penelitian terkait deteksi kebocoran pipa dilakukan oleh Santoso, dkk.
(2013) yang menggunakan teknologi Differential Pressure Transducer
(DPT) yang ditempatkan sebelum dan sesudah titik kebocoran untuk
merekam beda tekanan. DPT dihubungkan dengan peralatan pengkondisi
sinyal dan ADC yang menghasilkan data beda tekanan. Gambar 2.1
menunjukkan sketsa pengujian yang dilakukan.
Gambar 2.1 Sketsa Pengujian Deteksi Kebocoran Pipa dengan DPT
(Santoso, dkk., 2013).
Jarak pengukuran kebocoran adalah 600 mm dan kebocoran buatan
dilakukan dengan menggunakan solenoid valve. Dalam penelitian tersebut,
pengolahan data menggunakan program Matlab untuk memperoleh grafik
beda tekanan dalam rangkaian waktu, mean, probability density function

8
(PDF), autocorrelation, dan power spectral density (PSD). Gambar 2.2
berikut menunjukkan hasil analisis beda tekanan upstream dan downstream.
(a) (b) Gambar 2.2 Hasil Analisis Beda Tekanan (a) Upstream (b) Downstream
(Santoso, dkk., 2013).
Pada upstream, kondisi bocor tidak menghasilkan perubahan beda tekanan.
Pada downstream, kondisi bocor menghasilkan beda tekanan lebih tinggi
apabila dibandingkan dengan kondisi tidak bocor. Hal ini diakibatkan
perubahan tekanan pada titik kebocoran (menjadi tekanan atmosfer).
Berdasarkan hasil tersebut diperoleh bahwa pada kondisi pipa bocor
menghasilkan beda tekanan lebih tinggi dibandingkan kondisi pipa tidak
bocor.
Sadeghioon, et al. (2014) melakukan pengujian dengan mengembangkan
jaringan sensor wireless bawah tanah (Underground Wireless Sensor
Network/UWSN) berbasis Force Sensitive Resistor (FSR) untuk memantau
kebocoran pipa menggunakan jaringan nirkabel. Prinsip pengujian ini
hampir sama dengan penelitian Santoso, dkk. tersebut diatas, perbedaannya
9
pada deteksi beda tekanan sebelum dan sesudah titik kebocoran digunakan
teknologi Force Sensitive Resistor (FSR) dan pemantauan kondisi
kebocoran pipa menggunakan jaringan nirkabel.
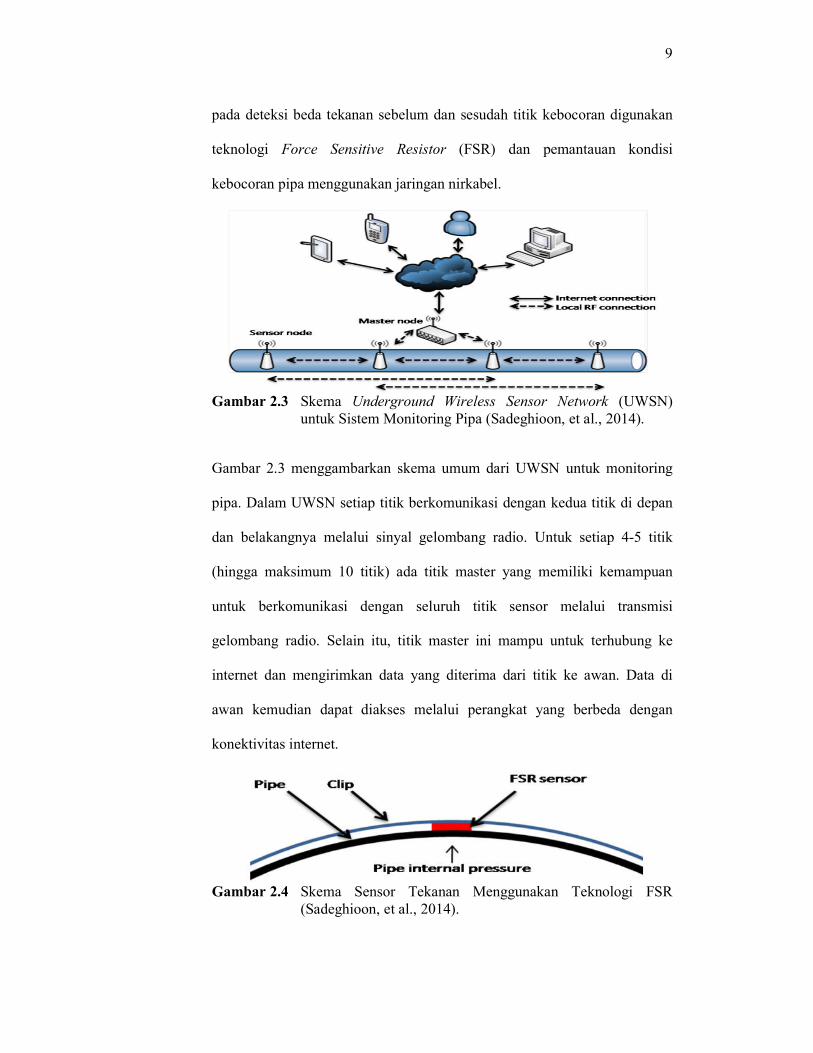
Gambar 2.3 Skema Underground Wireless Sensor Network (UWSN)
untuk Sistem Monitoring Pipa (Sadeghioon, et al., 2014).
Gambar 2.3 menggambarkan skema umum dari UWSN untuk monitoring
pipa. Dalam UWSN setiap titik berkomunikasi dengan kedua titik di depan
dan belakangnya melalui sinyal gelombang radio. Untuk setiap 4-5 titik
(hingga maksimum 10 titik) ada titik master yang memiliki kemampuan
untuk berkomunikasi dengan seluruh titik sensor melalui transmisi
gelombang radio. Selain itu, titik master ini mampu untuk terhubung ke
internet dan mengirimkan data yang diterima dari titik ke awan. Data di
awan kemudian dapat diakses melalui perangkat yang berbeda dengan
konektivitas internet.
Gambar 2.4 Skema Sensor Tekanan Menggunakan Teknologi FSR
(Sadeghioon, et al., 2014).

10
Gambar 2.4 menunjukkan skema sensor tekanan menggunakan FSR. Sensor
FSR dilekatkan pada bagian luar pipa dengan menggunakan klip yang
modulus Youngnya lebih besar dari pipa. Prinsip kerja sensor tersebut, yaitu
tekanan pada pipa menyebabkan gaya kontak antara pipa dan klip. Gaya
kontak ini kemudian diukur dengan sensor FSR, selanjutnya perubahan
tekanan internal relatif dihitung dari gaya ini menggunakan Persamaan 2.1
berikut:
�� =���
�����
����������
����� ...................... (2.1)
dalam hal ini P (Pa) adalah tekanan internal pipa, rp(m) adalah jari-jari pipa,
rj(m) adalah jari-jari klip, Ep(Pa) adalah modulus Young dari pipa, Ej(Pa)
adalah modulus Young dari klip, tp(m) dan tj(m) adalah ketebalan pipa dan
klip masing-masing. Gaya kontak pada sensor Fc (N) kemudian dapat
dihitung dari Persamaan 2.2, di mana As (m2) adalah daerah sensor dan K
adalah konstanta antara 0 dan 1 yang menunjukkan fraksi kontak tekanan
yang diterapkan ke sensor.
�� = ����� ...................... (2.2)
Dari Persamaan 2.1 dan 2.2 dapat disimpulkan bahwa perubahan tekanan
akan menyebabkan perubahan gaya kontak pada sensor. Hal ini akan
mengakibatkan perubahan resistansi FSR. Perubahan resistansi tersebut
kemudian diukur dan diubah menjadi sinyal analog (tegangan) melalui
pembagi tegangan.

11
Gambar 2.5 Sistem Pengujian Deteksi Kebocoran Pipa dengan FSR
(Sadeghioon, et al., 2014) Gambar 2.5 menunjukkan sistem pengujian deteksi kebocoran pipa
berbentuk U yang dibuat dari pipa PVC berdiameter 40 mm dengan letak
kebocoran berada di tengah. Kelima sensor FSR dilekatkan pada bagian
pipa PVC dengan interval jarak sebesar 2 m. Sensor 1, 2, dan 3 diletakkan
sebelum kebocoran, sedangkan sensor 4 dan 5 diletakkan setelah kebocoran.
Air mengalir pada sistem dengan bantuan pompa air yang mampu
memberikan tekanan sampai dengan 3 bar.
Gambar 2.6 Penurunan Tekanan yang Disebabkan oleh Kebocoran Pipa
(Sadeghioon, et al., 2014)
Gambar 2.6 menunjukkan penurunan tekanan yang disebabkan oleh
kebocoran. Tekanan yang dideteksi sensor 4 dan 5 yang berada pada titik
setelah kebocoran berbeda dengan tekanan sensor 1, 2, dan 3 yang berada

12
pada titik sebelum kebocoran. Dari hasil tersebut dapat ditentukan perkiraan
letak kebocoran pipa, yaitu di suatu tempat diantara sensor 3 dan 4.
2. Deteksi Kebocoran Fluida Berbasis TCP/IP
Penelitian dengan objek fluida berbeda yaitu gas dilakukan oleh Kirom,
dkk. (2013) dengan memonitoring kebocoran gas berbasis TCP/IP. Dalam
hal ini, sistem deteksi kebocoran gas dikombinasikan dengan jaringan
berbasis TCP/IP yang menghasilkan sistem monitoring secara terpusat
sehingga menambah efisiensi dan kecepatan transimisi data.
Gambar 2.7 Sistem Monitoring dan Deteksi Kebocoran Gas Berbasis
TCP/IP (Kirom, dkk. 2013).
Gambar 2.7 menunjukkan sistem monitoring kebocoran gas secara
keseluruhan berbasis TCP/IP. Untuk mentransmisikan data dari
mikrokontroler ke komputer dalam penelitian tersebut digunakan modul
wiznet WIZ110SR sebagai perangkat pengubah protokol. Dalam hal ini,
data dari sensor terlebih dahulu diolah pada ADC mikrokontroler, kemudian
data hasil pengolahan dikirim melalui serial mikrokontroler dan diubah
menjadi data TCP/IP oleh modul wiznet WIZ110SR. Dari penelitian ini,

13
diperoleh sistem monitoring yang dapat merespon kebocoran gas serta
menanganinya dengan keberhasilan 100%, dan transfer data melalui modul
wiznet WIZ110SR berjalan baik dengan error sebesar 0%.
3. Pemodelan Matematika Letak Kebocoran Pipa
Baghdadi dan Mansy (1988) melakukan pemodelan secara matematis dan
pengujian eksperimental untuk menentukan letak kebocoran pipa. Pengujian
eksperimental dilakukan dengan menggunakan pipa PVC yang
permukaannya halus dengan panjang 12 m dan diameter dalam 26 mm, tiga
buah orifice meter untuk mengukur debit air masuk, dan tabung pitot untuk
mengukur debit air keluar. Titik kebocoran berada pada jarak X dari alat
ukur debit air masuk.
Gambar 2.8 Sistem untuk Memodelkan secara Matematis Letak
Kebocoran Pipa (Baghdadi dan Mansy, 1988).
Gambar 2.8 menunjukkan sistem yang dipertimbangkan untuk memodelkan
secara matematika letak kebocoran pipa dalam penelitiannya. Berikut
dijabarkan variabel-variabel yang mempengaruhi pada kasus tersebut.

14
a. Pada bagian masuk
Q1 = debit masuk ke pipa
h1 = ketinggian statis pada bagian masuk.
b. Pada bagian keluar
Q2 = debit keluar dari pipa
h2 = ketinggian statis pada bagian keluar.
c. Di lokasi lubang
Qx = debit semburan dari lubang
hx1 = ketinggian statis bagian hulu dari lokasi lubang
hx2 = ketinggian statis bagian hilir dari lokasi lubang
(cdAx)* = debit luasan efektif melewati lubang (hasil kali dari luasan
sebenarnya dari lubang Ax dan koefisien debit cd)
X = letak kebocoran diukur dari bagian masuk.
Variabel E pada Gambar 2.8 menunjukkan total energi per unit berat, yaitu
jumlah ketinggian statis dan ketinggian dinamis:
�� = ℎ� + ��
�
�� ...................... (2.3)
dalam hal ini, i sama dengan 1 pada bagian masukan, 2 pada bagian
keluaran, X1 sebelum lubang, dan X2 setelah lubang. Dari daftar variabel
tersebut, diketahui terdapat sembilan variabel. Jika salah satu diukur baik
debit ataupun tekanan pada bagian masuk dan bagian keluar pipa, maka
diperlukan lima persamaan berikut untuk memecahkan masalah penentuan
letak kebocoran pipa.
1. Persamaan kontinuitas
�� − �� = �� ...................... (2.4)
15
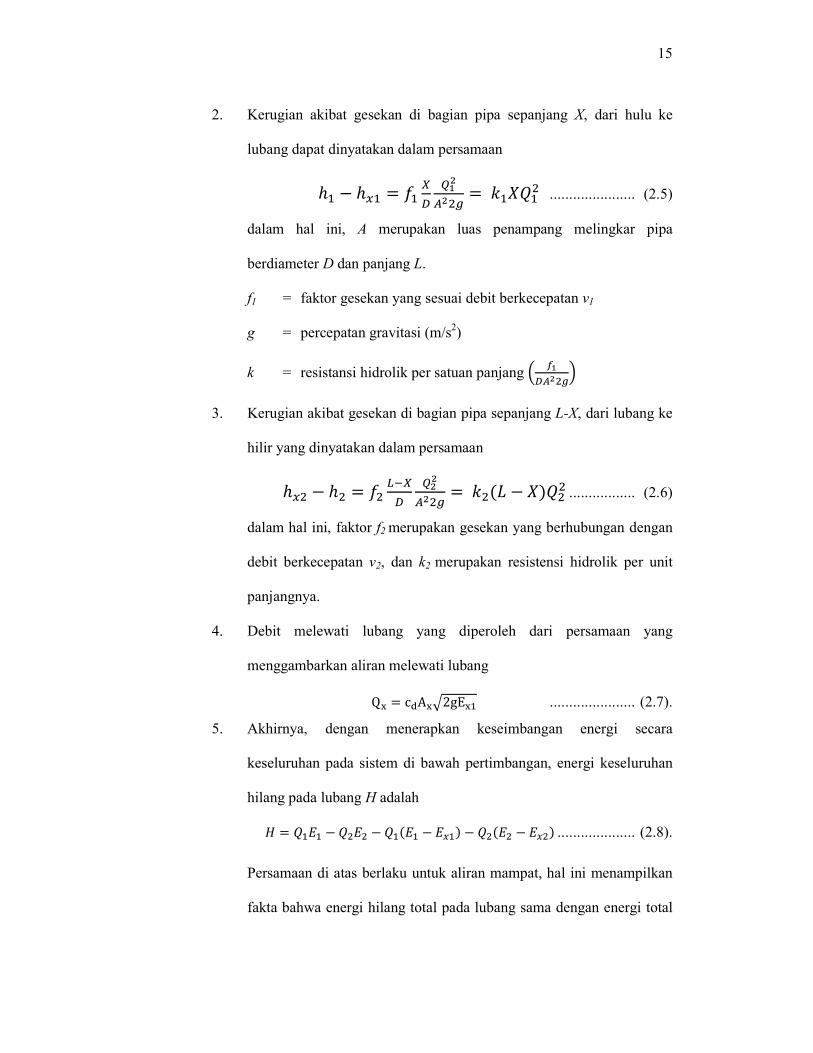
2. Kerugian akibat gesekan di bagian pipa sepanjang X, dari hulu ke
lubang dapat dinyatakan dalam persamaan
ℎ� − ℎ�� = ���
�
���
����= �����
� ...................... (2.5)
dalam hal ini, A merupakan luas penampang melingkar pipa
berdiameter D dan panjang L.
f1 = faktor gesekan yang sesuai debit berkecepatan v1
g = percepatan gravitasi (m/s2)
k = resistansi hidrolik per satuan panjang ���
������
3. Kerugian akibat gesekan di bagian pipa sepanjang L-X, dari lubang ke
hilir yang dinyatakan dalam persamaan
ℎ�� − ℎ� = �����
�
���
����= ��(� − �)��
� ................. (2.6)
dalam hal ini, faktor f2 merupakan gesekan yang berhubungan dengan
debit berkecepatan v2, dan k2 merupakan resistensi hidrolik per unit
panjangnya.
4. Debit melewati lubang yang diperoleh dari persamaan yang
menggambarkan aliran melewati lubang
Q � = c�A��2gE�� ...................... (2.7).
5. Akhirnya, dengan menerapkan keseimbangan energi secara
keseluruhan pada sistem di bawah pertimbangan, energi keseluruhan
hilang pada lubang H adalah
� = ���� − ���� − ��(�� − ���)− ��(�� − ���) .................... (2.8).
Persamaan di atas berlaku untuk aliran mampat, hal ini menampilkan
fakta bahwa energi hilang total pada lubang sama dengan energi total
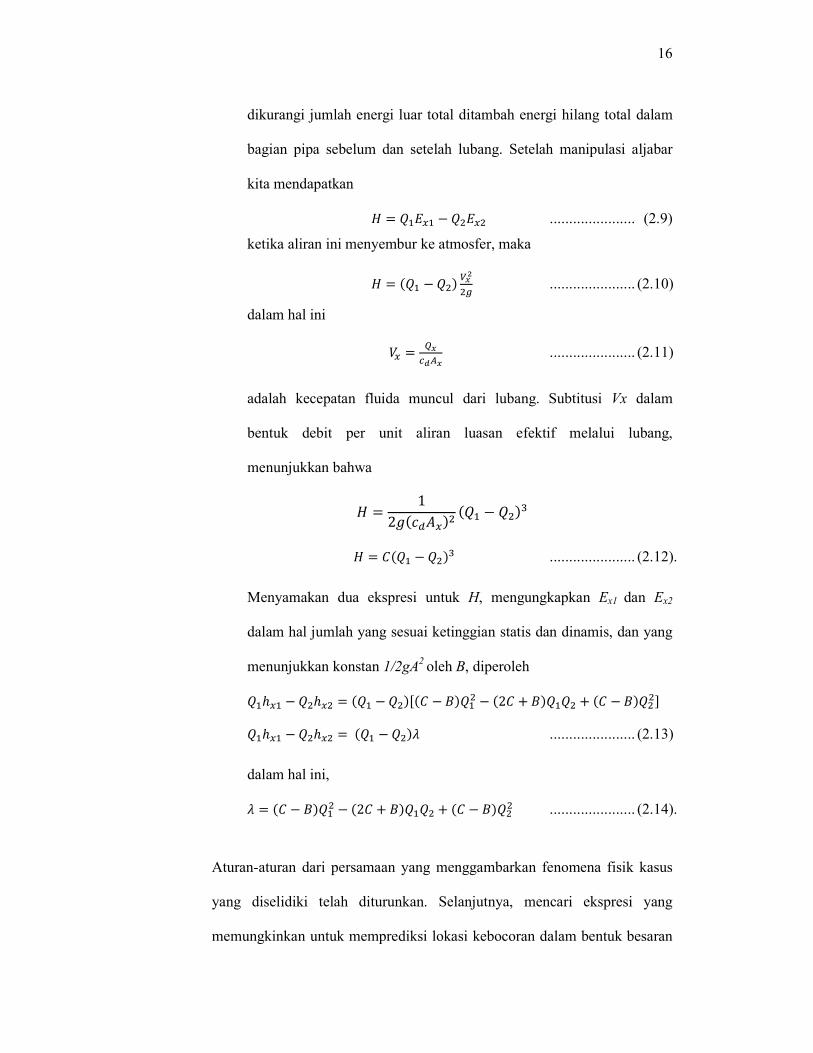
16
dikurangi jumlah energi luar total ditambah energi hilang total dalam
bagian pipa sebelum dan setelah lubang. Setelah manipulasi aljabar
kita mendapatkan
� = ����� − ����� ...................... (2.9)
ketika aliran ini menyembur ke atmosfer, maka
� = (�� − ��)��
�
�� ...................... (2.10)
dalam hal ini
�� =��
�� �� ...................... (2.11)
adalah kecepatan fluida muncul dari lubang. Subtitusi Vx dalam
bentuk debit per unit aliran luasan efektif melalui lubang,
menunjukkan bahwa
� =1
2�(����)�(�� − ��)�
� = �(�� − ��)� ...................... (2.12).
Menyamakan dua ekspresi untuk H, mengungkapkan Ex1 dan Ex2
dalam hal jumlah yang sesuai ketinggian statis dan dinamis, dan yang
menunjukkan konstan 1/2gA2 oleh B, diperoleh
��ℎ�� − ��ℎ�� = (�� − ��)[(� − �)��� − (2� + �)���� + (� − �)��
�]
��ℎ�� − ��ℎ�� = (�� − ��)� ...................... (2.13)
dalam hal ini,
� = (� − �)��� − (2� + �)���� + (� − �)��
� ...................... (2.14).
Aturan-aturan dari persamaan yang menggambarkan fenomena fisik kasus
yang diselidiki telah diturunkan. Selanjutnya, mencari ekspresi yang
memungkinkan untuk memprediksi lokasi kebocoran dalam bentuk besaran

17
yang diukur pada bagian masukan dan bagian keluaran pipa, terutama h1, Q1,
h2, dan Q2. Untuk mencapai tujuan ini, dapat disubtitusikan dalam
persamaan (2.13) nilai-nilai hx1 dan hx2 dari persamaan (2.5) dan (2.6),
sehingga diperoleh persamaan letak kebocoran pipa yaitu
�� =(�����)������
���� �� �
���(����)
��� ��� �
� ������
� ...................... (2.15)
dalam hal ini, Xc adalah nilai X hasil perhitungan (m), L adalah panjang pipa
total (m), h1 adalah ketinggian statis alat ukur sebelum titik kebocoran (m),
h2 adalah ketinggian statis alat ukur setelah titik kebocoran (m), k1 adalah
resistansi hidrolik per satuan panjang sebelum titik kebocoran (s2/m6), k2
adalah resistansi hidrolik per satuan panjang setelah titik kebocoran (s2/m6),
Q1 adalah debit masuk ke pipa (m3/s), Q2 adalah debit keluar dari pipa (m3/s),
dan λ adalah konstanta yang diperoleh dari Persamaan 2.14 (m).
Gambar 2.9 Grafik Perbandingan antara Prediksi Lokasi Lubang Relatif
(Xc/L) dengan Lokasi Lubang Relatif Sebenarnya (X/L) (Baghdadi dan Mansy, 1988).
Gambar 2.9 menunjukkan hasil perbandingan antara lokasi lubang relatif
perhitungan dan lokasi lubang relatif sebenarnya. Kedekatan hasil antara

18
letak lubang yang sebenarnya dan letak lubang yang diperoleh dengan
menggunakan Persamaan 2.15 menegaskan keabsahan formulasi
matematika tersebut.
B. Persamaan Kontinuitas
Suatu fluida yang sedang mengalir melalui suatu volume yang tetap (misalnya
sebuah tangki) yang mempunyai satu sisi masuk, dan satu sisi keluar seperti
yang ditunjukkan Gambar 2.10 berikut.
Gambar 2.10 Pemodelan Aliran Tunak Masuk, dan Keluar Sebuah Tangki
(Munson dan Young, 2004).
Jika alirannya tunak sehingga tidak terjadi akumulasi tambahan fluida dalam
volume tersebut, laju aliran fluida yang masuk ke dalam volume harus sama
dengan laju aliran yang keluar dari volume (karena kalau tidak massa-nya tidak
kekal). Laju aliran massa dari sebuah sisi keluar, m (slug/s atau kg/s), diberikan
oleh m = ρQ, dimana Q (ft3/s atau m3/s) adalah laju aliran volume. Jika luas
sisi keluar A dan fluida mengalir melintasi luas ini (tegak lurus/normal
terhadap luas) dengan kecepatan rata-rata v, maka volume dari fluida yang
melintasi sisi keluar ini dalam selang waktu �� adalah ����, yang artinya sama
dengan sebuah volume dengan panjang ��� dan luas penampangnya A. Jadi

19
laju aliran volume (volume per satuan waktu) adalah Q = vA. Sehingga, m =
ρvA. Untuk massa yang kekal, laju aliran masuk harus sama dengan laju aliran
keluar. Jika sisi masuk ditandai dengan (1), dan sisi keluar (2), maka m1 = m2.
Jadi kekalan massa membutuhkan:
ρ1v1A1 = ρ2v2A2 ....................................... (2.16).
Jika kerapatan tetap konstan, maka ρ1 = ρ2, dan persamaan di atas menjadi
persamaan kontinuitas untuk aliran tak mampu-mampat
A1v1 = A2v2, atau Q1 = Q2 ................................. (2.17).
Sebagai contoh, jika luas aliran sisi keluar separuh dari luas aliran sisi masuk,
maka kecepatan di sisi keluar adalah dua kali dari kecepatan masuk, hal ini
karena v2= A1v1/A2 = 2 v1 (Munson dan Young, 2004).
C. Persamaan Bernoulli
Aliran dari suatu segmen fluida ideal yang melewati pipa tidak beraturan dalam
selang waktu Δt ditunjukkan Gambar 2.11 berikut.
Gambar 2.11 Fluida dalam Aliran Laminar Melewati Pipa yang Tertutup
(Serway dan Jewett, 2009).

20
Pada awal selang waktu tersebut, segmen dari fluida terdiri atas bagian yang
diarsir (bagian 1) di sebelah kiri dan bagian yang tidak diarsir. Selama selang
waktu tersebut, ujung sebelah kirinya bergerak ke kanan sejauh jarak Δx1, yang
merupakan panjang dari bagian yang diarsir di sebelah kiri. Sedangkan ujung
sebelah kanannya bergerak ke kanan sejauh jarak Δx2, yang merupakan panjang
dari bagian abu-abu yang diarsir (bagian 2) di bagian kanan atas Gambar 2.11.
Oleh karena itu, pada akhir dari selang waktu tersebut, segmen fluida terdiri
dari bagian yang tidak diarsir dan bagian abu-abu yang diarsir di sebelah kanan
atas.
Usaha total yang dilakukan pada sistem oleh fluida di luar segmen sama
dengan perubahan energi mekanik sistem W = ΔK + ΔU. Dengan melakukan
subtitusi untuk setiap suku dalam persamaan ini, diperoleh:
(P1 – P2) V = ½ m v22 – ½ mv1
2 + mgy2 – mgy1 .................. (2.18).
Jika setiap sukunya dibagi dengan volume bagian V dan mengingat bahwa
ρ=m/V, maka persamaan ini akan menjadi:
P1+ ½ ρv12+ρgy1= P2 + ½ ρ v2
2 + ρgy2 ....................... (2.19).
Persamaan 2.18 merupakan persamaan Bernoulii sebagaimana dapat diterapkan
pada fluida ideal. Persamaan ini juga dapat ditulis:
P + ½ ρv2+ρgy = konstan ................................ (2.20).
Persamaan ini menunjukkan bahwa tekanan fluida berkurang ketika kelajuan
fluida bertambah. Selain itu, tekanan juga berkurang ketika ketinggiannya
bertambah (Serway dan Jewett, 2009).

21
D. Metode Pengukuran Debit Air
Dalam pengukuran debit air secara tidak langsung digunakan beberapa alat
pengukur yang dapat menunjukkan ketersediaan air pengairan bagi penyaluran
melalui jaringan-jaringan yang telah ada atau telah dibangun. Dalam hal ini
salah satu alat pengukur yang telah biasa digunakan yaitu tangki terbuka.
Aliran zat cair dari sebuah lubang bundar pada sisi sebuah tangki terbuka
diduga dengan menuliskan persamaan Bernoulli dari sebuah titik pada
permukaan bebas ke pancaran yang sempit, di mana garis-garis arus sejajar dari
titik 1 hingga titik 2 dalam Gambar 2.12 berikut.
Gambar 2.12 Aliran Melalui Sebuah Lubang Bebas (Olson, 1993).
Kecepatan di titik 1 pada hakikatnya nol, dan tekanan pada 1 dan 2 adalah
tekanan atmosfer. Jadi persamaan Bernoulli dalam hal ini, adalah:
�� =��
�
��+ �� .............................................. (2.21)
sehingga
�� = �2� ∆ℎ .......................................... (2.22)
dan
������ = ���2� ∆ℎ ........................................ (2.23).
Sehingga ekspresi sederhana untuk laju aliran sesungguhnya adalah:

22
� = �� ���2� ∆ℎ........................................ (2.24)
dalam hal ini, A0 sebagai luas lubang pancar, dan Cd adalah koefisien debit ,
yang bergantung pada kontraksi pancaran dari lubang pancar ke potongan 2
(Olson, 1993).
E. Aliran Laminar dan Turbulen
Osborne Reynolds telah melakukan beberapa percobaan untuk menentukan
kriteria aliran laminar dan turbulen. Reynolds menemukan bahwa aliran selalu
menjadi laminar, jika kecepatan alirannya diturunkan sedemikian rupa
sehingga bilangan Reynolds lebih kecil dari 2300 (Re < 2300). Begitupula
dikatakan alirannya turbulen, pada saat bilangan Reynolds lebih besar dari
4000 (Re > 4000). Dan jika bilangan Reynolds berada diantara 2300 dan 4000
(2300 < Re <4000) maka aliran tersebut adalah aliran yang berada pada daerah
transisi.
Gambar 2.13 Skema Aliran dalam Pipa (Streeter, 1988).
Untuk menganalisis kedua jenis aliran ini diberikan parameter tak berdimensi
yang dikenal dengan nama bilangan Reynolds sebagai berikut:
�� =� �
� ............................................... (2.25)
dengan Re sebagai bilangan Reynolds, v sebagai kecepatan fluida (m/s), D =
diameter pipa (m), dan υ = viskositas kinematika fluida (m2/s) (White, 1986).

23
Aliran fluida dalam pipa yang berbentuk lingkaran terbagi menjadi dua, yaitu
aliran laminar dan aliran turbulen. Karakteristik antara kedua aliran tersebut
berbeda–beda dari segi kecepatan, debit dan massa jenisnya. Bilangan
Reynolds dapat mendefinisikan kedua aliran campuran air-udara tersebut
dengan persamaan berikut:
�� =�� � ��
��=
� ��
� ................................. (2.26).
Pola aliran pada pipa horizontal, ada efek kekuatan gravitasi untuk
menggantikan cairan yang lebih berat mendekati pipa bagian bawah. Bentuk
lain dari pola aliran dapat bertambah karena efek ini, dimana aliran tersebut
dibagi menjadi dua lapisan (Biksono, 2006).
Tabel 2.1 menunjukkan densitas, viskositas kinematika dan viskositas
dinamika air pada rentang suhu 0ºC sampai 100ºC.
Tabel 2.1 Densitas, Viskositas Kinematika dan Viskositas Dinamika Air (Munson dan Young, 2004).
Suhu (ºC) Densitas (kg/m3) Viskositas Kinematika
(m2/s)
Viskositas Dinamika (N
s/m2) 0 999.9 1.787 x 10-6 1.787 x 10-3 5 1000.0 1.519 x 10-6 1.519 x 10-3
10 999.7 1.307 x 10-6 1.307 x 10-3 20 998.2 1.004 x 10-6 1.002 x 10-3 30 995.7 8.009 x 10-6 7.975 x 10-4 40 992.2 6.580 x 10-7 6.529 x 10-4 50 988.1 5.534 x 10-7 5.468 x 10-4 60 983.2 4.745 x 10-7 4.665 x 10-4 70 977.8 4.134 x 10-7 4.042 x 10-4 80 971.8 3.650 x 10-7 3.547 x 10-4 90 965.3 3.260 x 10-7 3.147 x 10-4 100 958.4 2.940 x 10-7 2.818 x 10-4
Perbedaan karakteristik antara aliran laminar dan turbulen juga terdapat pada
persamaan faktor gesekan pipa (f). Aliran laminar memiliki nilai faktor gesekan

24
yang tidak bergantung pada tingkat kekerasan pipa dan diameter pipa. Faktor
gesekan pipa (f) pada aliran laminar yaitu:
� =��
�� ......................................................... (2.27)
dalam hal ini Re merupakan bilangan Reynolds kurang dari 2000 (Re < 2000).
Aliran turbulen memiliki nilai faktor gesekan pipa yang bergantung pada
tingkat kekerasan pipa dan diameter pipa sehingga perumusannya menjadi
lebih komplek. Pada pipa halus, faktor gesekan yang dirumuskan Blasius yaitu:
� =�.���
���.�� .................................................. (2.28)
dalam hal ini Re merupakan bilangan Reynolds kurang dari 105 (Re < 105)
(Munson dan Young, 2004).
F. Water Flow Sensor ¾ Inchi
Water flow sensor terdiri dari badan katup plastik, rotor air, dan sensor efek
hall. Keunggulan sensor flowmeter berbasis sensor effect hall yaitu sistem
deteksinya non-kontak sehingga tahan lama dan keluarannya berupa sinyal
digital sehingga mudah diproses dan kebal terhadap noise (Sood, et al., 2013).
Berikut bentuk fisik water flow sensor G3/4 model FS300A.
Gambar 2.14 Bentuk Fisik Water Flow Sensor Model FS300A G3/4
(www.seeedstudio.com)

25
Ketika air mengalir melalui rotor, rotor berputar. Perubahan kecepatan air
mengalir dengan tingkat debit berbeda-beda. Keluaran sensor efek hall berupa
sinyal pulsa. Kelebihan sensor ini adalah hanya membutuhkan satu sinyal
(SIG) selain jalur 5V DC dan Ground. Spesifikasi water flow sensor model
FS300A G3/4 adalah sebagai berikut.
a. Bekerja pada tegangan 5V DC-24VDC.
b. Arus maksimum yaitu 15 mA pada tegangan 5V DC.
c. Rentang pengukuran debit 0,5 ~ 60 Liter/menit.
d. Suhu Pengoperasian 0° C ~ 80°C.
e. Operasi kelembaban 35% ~ 90%RH.
f. Tekanan air ≤2.0 Mpa.
g. Karakteristik keluaran seperti berikut.
Gambar 2.15 Grafik Debit Air Terhadap Keluaran Sensor Flow Meter
Berupa Frekuensi (www.seeedstudio.com). Prinsip kerja water flow sensor adalah dengan memanfaatkan fenomena efek
hall. Efek hall ini didasarkan pada efek medan magnet terhadap partikel
bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais
efek hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus

26
arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan
menghasilkan medan listrik. Medan listrik terus membesar hingga gaya
Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara
kedua sisi divais tersebut disebut potensial hall. Potensial hall ini sebanding
dengan medan magnet dan arus listrik yang melalui divais. Proses
pengkonversian berlangsung dalam sensor. Adanya fluida yang mengalir pada
sensor mengakibatkan rotor pada sensor berputar. Putaran pada rotor akan
menimbulkan medan magnet pada kumparan yang terdapat pada water flow
sensor. Medan magnet tersebut yang akan dikonversikan oleh efek hall
menjadi pulsa (Siregar, dkk., 2013).
G. Aturan TCP/IP Routing
TCP/IP adalah serangkaian protokol dimana setiap protokol melakukan
sebagian dari keseluruhan tugas komunikasi jaringan. Sebuah IP router (atau
gateway) pada prinsipnya adalah sebuah host TCP/IP yang dilengkapi dengan
dua atau lebih koneksi jaringan. Sebuah router dapat berupa komputer yang
khusus atau sebuah host workstation yang dikonfigurasikan agar melakukan
routing.
Gambar 2.16 Aturan Dasar Routing 1 (Heywood, 1996).

27
Berikut beberapa aturan dasar routing, saat subnetting tidak digunakan, dua
host yang terhubung ke segmen jaringan yang sama dapat berkomunikasi
langsung hanya jika mereka memiliki netid yang sama. Dalam Gambar 2.16
host A dan B dapat berkomunikasi langsung, tetapi baik A maupun B tidak
dapat berkomunikasi dengan C, karena mereka memiliki netid yang berbeda
(diasumsikan subnet mask setidaknya 255.255.255.0).
Gambar 2.17 Aturan Dasar Routing 2 (Heywood, 1996).
Saat subnetting dipergunakan, maka dua host yang terhubung ke segmen
jaringan yang sama dapat berkomunikasi hanya jika baik netid maupun
subnetid-nya sesuai. Bila netid atau subnetid berbeda, sebuah router harus
dipasang. Dalam Gambar 2.17, host A dan B dapat berkomunikasi secara
langsung, C memiliki netid yang sama dengan A dan B, tetapi C memiliki
subnetid yang berbeda. Dengan demikian, C tidak dapat berkomunikasi secara
langsung dengan A dan B. Disimpulkan dari ilustrasi Gambar 2.16 dan 2.17
host pada segmen jaringan yang sama tidak harus memiliki network id yang
sama. Walaupun host ini mengakses kabel yang sama, tetapi router IP
diperlukan agar mereka dapat berkomunikasi (Heywood, 1996).

28
H. WIZ110SR
WIZ110SR merupakan modul gateway yang mengubah protokol RS-232 ke
dalam protokol TCP/IP. Sehingga dimungkinkan melakukan pengukuran,
pengelolaan, dan pengendalian perangkat melalui jaringan berbasis ethernet
dan TCP/IP dengan menghubungkan peralatan yang ada dengan serial RS-232.
Dengan kata lain,WIZ110SR merupakan sebuah protokol pengubah data serial
dari piranti ke dalam protokol TCP/IP dan sebaliknya.
Gambar 2.18 WIZ110SR (Wiznet Co, 2008).
Fitur utama yang dimiliki WIZ110SR adalah sebagai berikut.
a. Koneksi langsung ke serial.
b. Menyediakan Firmware yang terbaharui.
c. Sistem stabil dan handal dengan menggunakan chip W5100.
d. Mendukung PPPoE Connection.
e. Mendukung konfigurasi serial.
f. Mendukung password untuk keamanan.
g. 10/100 Ethernet dan max 230 Kbps Serial Interface.
Ketika data diterima dari port serial, itu dikirim ke W5100 oleh MCU dan data
dikirim dari port ethernet, maka data diterima oleh penyangga internal W5100,

29
dan dikirim ke port serial oleh MCU. MCU dapat dikonfigurasi oleh pengguna
menggunakan software WIZ110SR configurasi tools (Wiznet Co, 2008).
I. Mikrokontroler ATmega 16
1. Fitur ATmega 16
Berikut ini beberapa fitur yang dimiliki oleh ATmega 16.
a. 131 macam instruksi, yang hampir semuanya dieksekusi dalam satu
siklus clock.
b. 32 x 8-bit register serba guna.
c. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
d. 16 Kbyte Flash Memori yang memiliki fasilitas In-System Programming.
e. 512 Byte internal EEPROM.
f. 1 Kbyte internal SRAM.
g. 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit.
h. 4 channel output PWM.
i. 8 channel ADC 10-bit.
j. Serial USART.
k. Master/Slave SPI serial interface.
l. Two-wire serial interface (Atmel Co, 2010).
2. Konfigurasi Pin
Konfigurasi pin ATmega16 dengan kemasan 40 pin Dual In-Line Package
(DIP) dapat dilihat pada Gambar 2.19 berikut.

30
Gambar 2.19 Konfigurasi Pin ATmega16 (Atmel Co, 2010).
3. Timer/counter ATmega 16
ATmega 16 memiliki tiga modul timer yang terdiri dari dua buah
timer/counter 8-bit, dan satu buah timer/counter 16-bit. Berikut beberapa
register yang digunakan untuk mengatur mode dan cara kerja timer/counter.
a. Timer/counterInterrupt Mask Register (TIMSK)
Gambar 2.20 Register TIMSK (Atmel Co, 2010).
1. Bit 7-OCIE2 digunakan untuk mengaktifkan interupsi output
compare matchtimer/counter 2.
2. Bit 6-TOIE2 digunakan untuk mengaktifkan interupsi
overflowtimer/counter 2.
3. Bit 5-TICIE1 digunakan untuk mengaktifkan interupsi input
capturetimer/counter1.
31
4. Bit 4-OCIE1A digunakan untuk mengaktifkan interupsi output
compare A matchtimer/counter 1.
5. Bit 3-OCIE1B digunakan untuk mengaktifkan interupsi output
compare B match timer/counter 1.
6. Bit 2-TOIE1 digunakan untuk mengaktifkan interupsi
overflowtimer/counter 1.
7. Bit 1-OCIE0 digunakan untuk mengaktifkan interupsi output
compare matchtimer/counter 0.
8. Bit 0-TOIE0 digunakan untuk mengaktifkan interupsi
overflowtimer/counter 0.
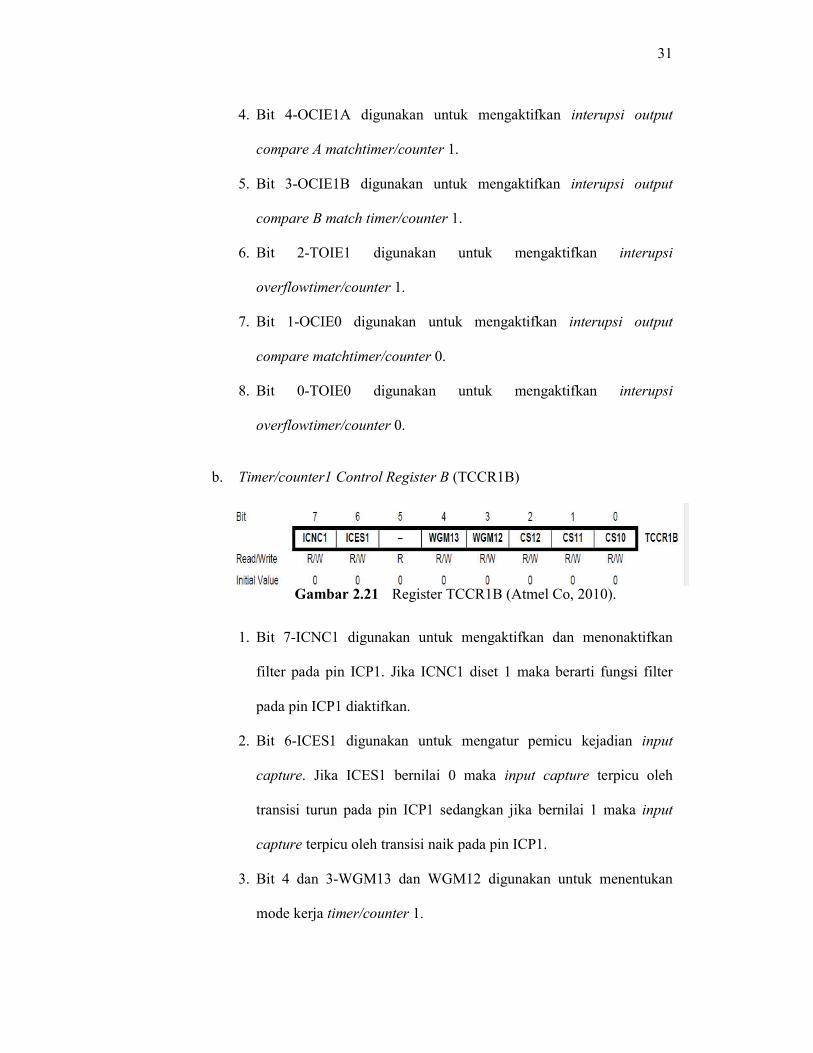
b. Timer/counter1 Control Register B (TCCR1B)
Gambar 2.21 Register TCCR1B (Atmel Co, 2010).
1. Bit 7-ICNC1 digunakan untuk mengaktifkan dan menonaktifkan
filter pada pin ICP1. Jika ICNC1 diset 1 maka berarti fungsi filter
pada pin ICP1 diaktifkan.
2. Bit 6-ICES1 digunakan untuk mengatur pemicu kejadian input
capture. Jika ICES1 bernilai 0 maka input capture terpicu oleh
transisi turun pada pin ICP1 sedangkan jika bernilai 1 maka input
capture terpicu oleh transisi naik pada pin ICP1.
3. Bit 4 dan 3-WGM13 dan WGM12 digunakan untuk menentukan
mode kerja timer/counter 1.

32
4. Bit 2, 1, dan 0-CS12, CS11, dan CS10 berfungsi untuk mengatur
skala sumber clock yang akan digunakan oleh timer/counter 1 seperti
dapat dilihat pada Tabel 2.2 berikut.
Tabel 2.2 Skala Clock Timer/Counter (Bejo, 2008).
CS12 CS11 CS10 Deskripsi
0 0 0 Tidak ada clock, timer/counter berhenti
0 0 1 Skala clock = 1 (Clocktimer = clock osilator)
0 1 0 Skala clock = 8 (Clocktimer = 1/8 clock osilator)
0 1 1 Skala clock = 64 (Clocktimer = 1/64 clock osilator)
1 0 0 Skala clock = 256 (Clocktimer = 1/256 clock osilator)
1 0 1 Skala clock = 1024 (Clocktimer = 1/1024 clock osilator)
1 1 0 Sumber clock eksternal pada pin T0, Clock pada transisi turun.
1 1 1 Sumber clock eksternal pada pin T0, Clock pada transisi naik.
c. Timer/counterRegister 1 (TCNT1H dan TCNT1L)
Gambar 2.22 Register TCNT1 (Atmel Co, 2010).
Register TCNT1H dan TCNT1L berfungsi untuk menyimpan data
cacahan timer/counter 1. Gabungan register TCN1H dan TCNT1L atau
sering disebut TCNT1 memiliki ukuran 16-bit sehingga dapat
melakukan cacahan dari 0x0000-0xFFFF atau 0-65535 (Bejo, 2008).
J. Real-Time Clock (RTC) DS1307
IC RTC DS1307 merupakan IC serial RTC tegangan rendah dengan format
waktu dan kalender yang lengkap. Format waktu atau kalender tersebut

33
menyediakan informasi mengenai detik, menit, jam, hari, tanggal, bulan dan
tahun. Format penghitungan tanggal dalam satu bulan juga telah disesuaikan
dengan kalender masehi, termasuk juga untuk tahun kabisat. DS1307 juga
memiliki built-in power-sense circuit yang dapat mendeteksi apabila terjadi
kesalahan supply dan secara otomatis mengubah pada sistem catu daya
cadangan (Rachmat, dkk., 2011).
Gambar 2.23 Rangkaian RTC (Zain, 2013).
Gambar 2.23 menunjukkan rangkaian RTC menggunakan IC DS1307 yang
digunakan Zain (2013) untuk mengontrol penerangan pada ruangan berbasis
mikrokontroler ATmega 8535 dan RTC DS1307. RTC DS1307 menggunakan
bus 2 bit data yang dikirimkan ke PORTC.0 dan PORTC.1 pada
mikrokontroler ATMega8535. Berdasarkan kombinasi output tersebut maka
mikrokontroler dapat mengeksekusi program yang telah ditetapkan.

34
K. Karakteristik Alat Ukur
Karakteristik statis dari alat ukur adalah sebagai berikut.
1. Akurasi dan ketidaktelitian (ketidakpastian pengukuran)
Akurasi dari alat ukur merupakan ukuran seberapa dekat nilai keluaran alat
ukur dengan nilai yang benar. Dalam prakteknya, ketidaktelitian angka lebih
umum dikenal daripada akurasi angka pada alat ukur. Ketidaktelitian adalah
sejauh mana nilai keluaran kemungkinan salah, dan sering dimunculkan
sebagai persentase dari skala penuh pembacaan alat ukur.
2. Presisi / pengulangan / reproduksibilitas
Presisi adalah istilah yang menggambarkan kemampuan alat ukur untuk
bebas dari kesalahan random. Jika sejumlah besar hasil pembacaan diambil
dari kuantitas yang sama menggunakan alat ukur presisi tinggi, maka
penyebaran pembacaan akan sangat kecil. Presisi tinggi tidak menyatakan
apapun tentang keakurasian pengukuran. Sebuah alat ukur presisi tinggi
mungkin memiliki akurasi rendah. Akurasi pengukuran yang rendah dari
alat ukur presisi tinggi biasanya disebabkan oleh bias dalam pengukuran,
yang dapat ditanggulangi dengan kalibrasi ulang.
Istilah pengulangan dan reproduksibilitas lebih kurang sama tetapi
diterapkan dalam konteks yang berbeda. Pengulangan menggambarkan
kedekatan hasil pembacaan keluaran, ketika masukan yang sama diterapkan
berulang-ulang dalam waktu yang singkat, dengan kondisi pengukuran yang
sama, alat ukur dan pengamat yang sama, lokasi yang sama, dan kondisi
penggunaan yang sama keseluruhan dipertahankan. Reproduksibilitas

35
menggambarkan kedekatan hasil pembacaan keluaran untuk masukan yang
sama ketika terdapat perubahan dalam metode pengukuran, pengamat, alat
ukur, lokasi, kondisi penggunaan dan waktu pengukuran. Kedua hal tersebut
menggambarkan penyebaran pembacaan output untuk input yang sama.
Penyebaran ini disebut sebagai pengulangan jika kondisi pengukuran adalah
konstan dan sebagai reproduksibilitas jika kondisi pengukuran bervariasi.
3. Toleransi
Toleransi merupakan istilah yang berkaitan erat dengan akurasi dan
didefinisikan sebagai kesalahan maksimum dari nilai yang diharapkan.
Ketika digunakan dengan benar, toleransi menggambarkan deviasi
maksimum komponen yang diproduksi dari beberapa nilai yang ditentukan.
4. Jangkauan atau rentang
Jangkauan atau rentang alat ukur didefinisikan sebagai rentang nilai
minimum dan maksimum yang dapat diukur oleh sebuah alat ukur.
5. Linearitas
Linieritas merupakan nilai keluaran alat ukur yang berbanding lurus
terhadap nilai yang diukur. Non-linearitas didefinisikan sebagai deviasi
maksimum dari setiap keluaran. Non-linearitas biasanya dinyatakan sebagai
persentase dari pembacaan skala penuh.
6. Sensitivitas pengukuran
Sensitivitas adalah perbandingan dari perubahan keluaran alat ukur yang
terjadi ketika nilai yang diukur berubah dengan sejumlah masukan yang
diberikan.

36
7. Ambang
Jika masukan ke instrumen secara bertahap meningkat dari nol, masukan
harus mencapai tingkat minimum tertentu sebelum mengalami perubahan
pada hasil pembacaan dari besaran yang dideteksi. Tingkat minimum pada
masukan ini disebut sebagai ambang dari alat ukur.
8. Resolusi
Ketika suatu instrumen menunjukkan pembacaan keluaran tertentu, terdapat
batas bawah pada besarnya perubahan nilai masukan yang menghasilkan
perubahan dalam pengamatan pada keluaran alat ukur. Batas bawah pada
besarnya perubahan nilai masukan atau perubahan terkecil dalam nilai yang
diukur yang dapat direspon oleh alat ukur disebut resolusi (Morris, 2001).

37
III. METODE PENELITIAN
A. Tempat dan Waktu Penelitian
Penelitian dilaksanakan pada bulan Oktober 2015 sampai dengan Maret 2016.
Perancangan alat penelitian dilakukan di Laboratorium Elektronika Dasar
Jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas
Lampung.
B. Alat dan Bahan
Alat dan bahan yang digunakan dalam penelitian adalah sebagai berikut.
1. Pipa PVC berukuran ¾ inchi sebagai objek penelitian.
2. Penampung air dengan volume 16 Liter.
3. Penyambung letter T dan plug pipa PVC berdiameter 21 mm, 12 mm, dan
8 mm digunakan untuk membuat kebocoran buatan.
4. Pompa air digunakan untuk memompa air ke penampung.
5. Pengontrol tinggi muka air untuk mengatur nyala dan matinya pompa air.
6. Sensor flowmeter model FS300A dengan jangkauan pengukuran 1 sampai
60 liter/menit. Sensor flowmeter berjumlah dua buah yang ditempatkan
sebelum dan sesudah titik kebocoran pipa untuk merekam perbedaan debit
air.

38
7. Mikrokontroler ATmega 16 digunakan untuk mengubah sinyal keluaran
sensor flowmeter berupa sinyal pulsa menjadi data berupa frekuensi
melalui modul Timer/Counter pada PORTB.1. Kemudian frekuensi yang
diperoleh diolah menjadi data debit sesuai karekteristik sensor flowmeter
pada Gambar 2.15 pada Bab 2.
8. IC RTC DS1307 digunakan sebagai referensi waktu mengenai detik,
menit, jam, hari, tanggal, bulan, dan tahun yang dikirimkan ke PORTC.0
dan PORTC.1 pada mikrokontroler ATmega 16.
9. WIZ110SR digunakan sebagai protokol konverter yang mentransmisikan
data yang dikirim dengan serial ethernet dan mikrokontroler untuk
mengkonversi kembali TCP/IP data yang diterima melalui jaringan ke data
serial untuk ke PC.
10. Hub/Switch digunakan sebagai kotak sambungan yang menerima data dari
WIZ110SR dan mentransmisikannya ke PC.
11. Kabel Unshielded Twisted Pair (UTP) sebagai media transmisi data.
12. Personal Computer (PC) digunakan untuk memproses dan menampilkan
hasil debit air.
13. Code Vision AVR (CVAVR) digunakan sebagai software pemrograman
mikrokontroler.
14. USB downloader digunakan untuk men-download program ke
mikrokontroler.
15. WIZ110SR Configuration Tool Ver 2.1.0 sebagai software pengaturan
pada WIZ110SR agar dapat digunakan.

39
16. Hyperterminal sebagai software interface penerima data dari
mikrokontroler.
C. Prosedur Penelitian
Dalam teori fisika mengenai persamaan kontinuitas untuk aliran tak mampu-
mampat, jika tidak terjadi akumulasi penambahan maupun pengurangan fluida
dalam suatu volume (wadah), laju aliran fluida yang masuk ke dalam volume
tersebut harus sama dengan laju aliran yang keluar dari volume. Oleh sebab itu,
jika terjadi suatu kebocoran dalam sistem distribusi fluida maka akan terjadi
perbedaan antara debit fluida masuk, dan debit fluida keluar. Dalam penelitian
ini, digunakan dua buah sensor flowmeter yang ditempatkan sebelum dan
sesudah titik kebocoran pipa untuk merekam perbedaan debit air. Dalam hal
ini, sensor flowmeter dihubungkan dengan mikrokontroler ATmega 16 yang
digunakan untuk mengubah hasil keluaran sensor flowmeter yang berupa
sinyal pulsa menjadi data debit air, kemudian hasil tersebut ditransmisikan ke
komputer menggunakan jaringan berbasis TCP/IP melalui modul WIZ110SR
untuk mendeteksi letak kebocoran pipa.
Dalam perancangan sistem deteksi letak kebocoran pipa PVC menggunakan
sensor flowmeter berbasis TCP/IP dilakukan dengan prosedur kerja sebagai
berikut.
1. Diagram Alir Penelitian
Langkah-langkah penyelesaian penelitian ini secara umum ditunjukkan
oleh Gambar 3.1 berikut.

40
Gambar 3.1 Diagram Alir Penelitian.
Tidak
Pembuatan Program
Merancang dan Membuat Rangkaian
Pengujian Rangkaian
Penyatuan dan Pengujian Model Sistem
Analisis Data Hasil Pengujian Sistem
Selesai
Berhasil
Berhasil
Sistem Bekerja
Benar
Data
Pengujian Sensor Flowmeter
Perancangan Model Sistem
Mulai
Ya
Ya
Ya
Ya
Tidak
Tidak
Tidak

41
2. Perancangan Model Sistem
Gambar 3.2 berikut menunjukkan model sistem yang digunakan untuk
menganalisa pengaruh selisih debit air masuk dan keluar terhadap letak
kebocoran pipa dan pengaruh besar lubang kebocoran terhadap letak
kebocoran pipa.
Gambar 3.2 Model Sistem Pengambilan Data.
Air yang melewati pipa berasal dari penampung, kecepatan aliran air
tersebut dapat memenuhi Persamaan 2.24 pada Bab 2
� = �� ���2� �
dalam hal ini, A0 sebagai luas lubang pancar (2.85x10-4 m2) dan Cd sebagai
koefisien aliran. Untuk menjaga kecepatan aliran air tetap konstan,
ketinggian permukaan air pada penampung dijaga agar tetap pada nilai y±5
cm dengan menggunakan pengontrol tinggi muka air yang berfungsi untuk
mengatur nyala dan matinya pompa air. Dalam hal ini, jika ketinggian air
kurang dari y maka pompa air dinyalakan dan jika ketinggian air lebih dari
y maka pompa air dimatikan.

42
Jarak antara kedua sensor yaitu X+p (cm), dalam hal ini p bernilai 80 cm.
Sensor 1 berada pada ketinggian h1 dan sensor 2 berada pada ketinggian
h2, dalam hal ini pipa diletakkan dengan kemiringan sebesar 1º. Kebocoran
pipa buatan menggunakan penyambung letter T dan plug pipa PVC
berdiameter 21 mm, 12 mm, dan 8 mm yang berada pada jarak X (cm) dari
sensor 2. Data debit air hasil keluaran sensor 1 dan sensor 2 diolah oleh
mikrokontroler ATmega 16, kemudian hasil tersebut ditransmisikan ke
komputer menggunakan jaringan berbasis TCP/IP melalui modul
WIZ110SR untuk dianalisa.
3. Perancangan Perangkat Keras
Perangkat keras untuk alat deteksi letak kebocoran pipa PVC terdiri dari
sistem minimum mikrokontroler yang dihubungkan dengan catu daya,
sensor flowmeter, rangkaian komunikasi serial, WIZ110SR, dan RTC.
a. Rangkaian Catu Daya
Gambar 3.3 menunjukkan rangkaian catu daya yang digunakan dalam
penelitian. Rangkaian catu daya digunakan untuk mencatu rangkaian
mikrokontroler dan modul WIZ110SR yang membutuhkan tegangan 6
VDC.
Gambar 3.3 Rangkaian Catu Daya.

Rangkaian menggunakan IC LM 317 yang berfungsi sebagai regulator
atau penstabil
Keluaran catu daya diatur menggunakan potensiometer 5 kΩ.
b. Rangkaian RTC
Skematik rangkaian RTC menggunakan DS1307
ditunjukkan oleh
kristal bernilai 32.768 kHz
Rangkaian RTC ini
yaitu SCL dan S
PORTC.1 pada mikrokontroler ATmega 16
c. Rangkaian Komunikasi Serial
Rangkaian antarmuka komunikasi serial
komunikasi antara mikrokontroler dan
Gambar 3.5 Rangkaian
Rangkaian menggunakan IC LM 317 yang berfungsi sebagai regulator
atau penstabil tegangan dengan keluaran diantara 1.2 sampai 12 VDC.
Keluaran catu daya diatur menggunakan potensiometer 5 kΩ.
Rangkaian RTC
Skematik rangkaian RTC menggunakan DS1307 pada penelitian
ditunjukkan oleh Gambar 3.4. Rangkaian RTC tersebut menggunakan
ernilai 32.768 kHz sebagai pembangkit frekuensi
Rangkaian RTC ini berkomunikasi dengan menggunakan bus 2 bit data
dan SDA yang masing-masing dihubungkan PORT
pada mikrokontroler ATmega 16.
Gambar 3.4 Rangkaian RTC.
n Komunikasi Serial
Rangkaian antarmuka komunikasi serial merupakan
komunikasi antara mikrokontroler dan personal computer (PC)
Rangkaian Komunikasi Serial menggunakan RS
43
Rangkaian menggunakan IC LM 317 yang berfungsi sebagai regulator
tegangan dengan keluaran diantara 1.2 sampai 12 VDC.
Keluaran catu daya diatur menggunakan potensiometer 5 kΩ.
pada penelitian
4. Rangkaian RTC tersebut menggunakan
sebagai pembangkit frekuensi osilator.
bus 2 bit data
PORTC.0 dan
merupakan gerbang
(PC).
RS-232.

Gambar 3.5 menunjukkan rangkaian komunikasi serial menggunakan
IC RS-232. Pada rangkaian ini digunakan IC RS
tegangan output m
dengan standar port serial pada komputer.
dengan pin 2 (RXD)
dan pin 8 (R
penerimaan data
d. Rangkaian Sistem Minimum Mikrokontroler
Rangkaian sistem minimum mikrokontroler merupakan rangkaian
elektronika yang terdiri dari komponen dasar (IC mikrokontroler
ATmega 16, regulator, resistor, kristal, kapasitor,
dibutuhkan oleh suatu IC untuk dapat berfungsi dengan baik.
Gambar 3.6 Rangkaian Sistem Minimum Mikrokontroler
Kristal yang digunakan bernilai 11.0592 MHz agar
yang kecil dalam transmisi data ke komputer, karena frekuensi tersebut
kompatibel dengan st
Gambar 3.5 menunjukkan rangkaian komunikasi serial menggunakan
Pada rangkaian ini digunakan IC RS-232 sebagai konverter
tegangan output mikrokontroler dari 5 V menjadi 15 V agar kompatibel
dengan standar port serial pada komputer. Pin 7 (T2OUT) dihubungkan
dengan pin 2 (RXD) DB9 sebagai jalur pengiriman data ke komputer
pin 8 (R2IN) dihubungkan ke pin 3 (TXD) DB9 sebagai jalur
data dari komputer.
Rangkaian Sistem Minimum Mikrokontroler
Rangkaian sistem minimum mikrokontroler merupakan rangkaian
elektronika yang terdiri dari komponen dasar (IC mikrokontroler
ATmega 16, regulator, resistor, kristal, kapasitor, pushbutton
dibutuhkan oleh suatu IC untuk dapat berfungsi dengan baik.
Rangkaian Sistem Minimum Mikrokontroler.
Kristal yang digunakan bernilai 11.0592 MHz agar dihasilkan
yang kecil dalam transmisi data ke komputer, karena frekuensi tersebut
kompatibel dengan standar frekuensi komputer.
44
Gambar 3.5 menunjukkan rangkaian komunikasi serial menggunakan
232 sebagai konverter
15 V agar kompatibel
dihubungkan
ke komputer
sebagai jalur
Rangkaian sistem minimum mikrokontroler merupakan rangkaian
elektronika yang terdiri dari komponen dasar (IC mikrokontroler
pushbutton) yang
dibutuhkan oleh suatu IC untuk dapat berfungsi dengan baik.
dihasilkan error
yang kecil dalam transmisi data ke komputer, karena frekuensi tersebut
45
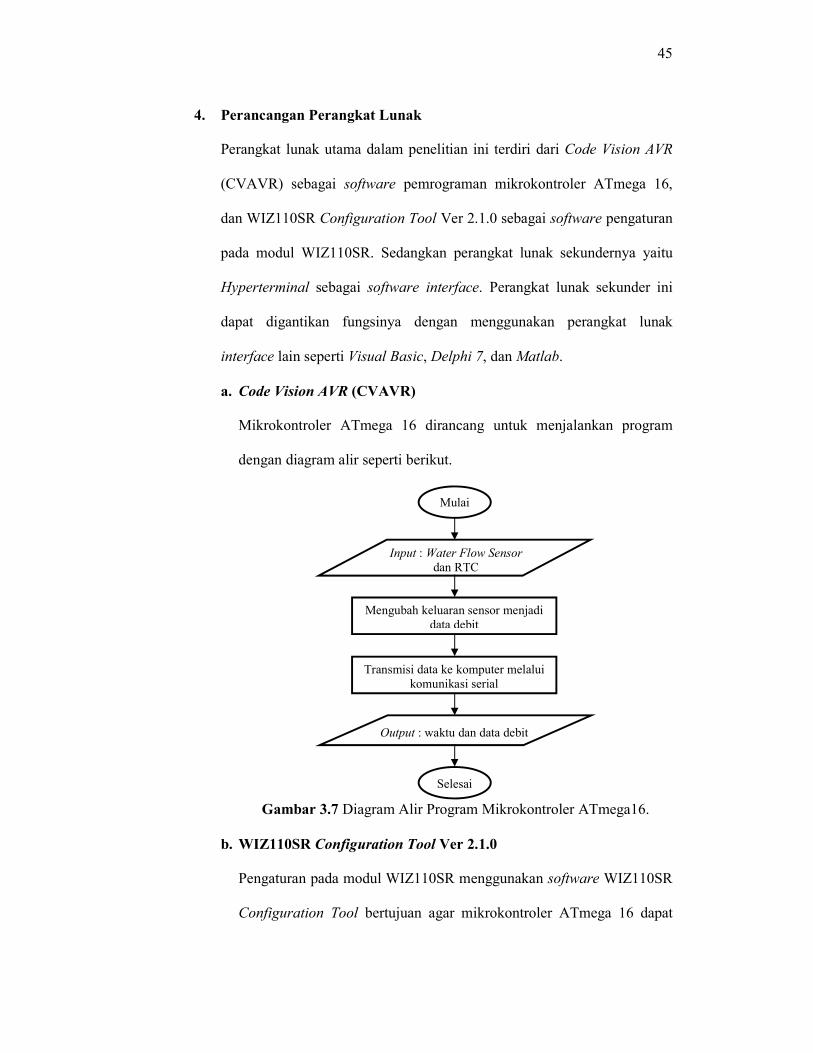
4. Perancangan Perangkat Lunak
Perangkat lunak utama dalam penelitian ini terdiri dari Code Vision AVR
(CVAVR) sebagai software pemrograman mikrokontroler ATmega 16,
dan WIZ110SR Configuration Tool Ver 2.1.0 sebagai software pengaturan
pada modul WIZ110SR. Sedangkan perangkat lunak sekundernya yaitu
Hyperterminal sebagai software interface. Perangkat lunak sekunder ini
dapat digantikan fungsinya dengan menggunakan perangkat lunak
interface lain seperti Visual Basic, Delphi 7, dan Matlab.
a. Code Vision AVR (CVAVR)
Mikrokontroler ATmega 16 dirancang untuk menjalankan program
dengan diagram alir seperti berikut.
Gambar 3.7 Diagram Alir Program Mikrokontroler ATmega16.
b. WIZ110SR Configuration Tool Ver 2.1.0
Pengaturan pada modul WIZ110SR menggunakan software WIZ110SR
Configuration Tool bertujuan agar mikrokontroler ATmega 16 dapat
Mengubah keluaran sensor menjadi data debit
Transmisi data ke komputer melalui komunikasi serial
Mulai
Selesai
Input : Water Flow Sensor dan RTC
Output : waktu dan data debit

46
berkomunikasi melalui jaringan berbasis internet protokol (IP)
menggunakan modul WIZ110SR. Gambar 3.8 berikut menunjukkan
tampilan jendela software WIZ110SR Configuration Tool Ver 2.1.0.
Gambar 3.8 Tampilan Software WIZ110SR Configuration Tool.
Prosedur yang dilakukan dalam pengaturan modul WIZ110SR adalah
sebagai berikut.
1. Mengatur koneksi Modul WIZ110SR dengan komputer yang akan
digunakan untuk proses konfigurasi melalui network switch.
2. Menekan tombol search pada tool untuk menampilkan daftar modul
yang terkoneksi ke jaringan. Daftar modul akan tampil di sebelah
kiri (Board List) pada Gambar 3.8.
3. Memilih salah satu board yang akan dikonfigurasi sehingga muncul
konfigurasi yang telah disimpan ke dalam modul sebelumnya.

47
4. Setelah board dipilih, memasukkan IP address dan subnetmask pada
kolom yang tersedia. Menurut aturan TCP/IP routing pada BAB 2,
subnet diatur sama yaitu 255.255.255.0 agar dua buah modul
WIZ110SR dapat berkomunikasi dengan komputer. IP address
modul 1 dan modul 2 diatur masing-masing beralamat 192.168.11.1
dan 192.168.11.2 untuk membedakan diantara keduanya.
5. Pada bagian port diisi sesuai dengan port komunikasi yang
digunakan. Untuk port yang digunakan adalah port 23.
5. Perancangan Pengujian Model Sistem
Pengujian model sistem merupakan prosedur yang dilakukan untuk
mendapatkan data-data pendukung dalam pencapaian tujuan dalam
penelitian ini yaitu menyelidiki pengaruh selisih debit air masuk dan
keluar terhadap letak kebocoran pipa dan pengaruh besar lubang
kebocoran terhadap letak kebocoran pipa. Pengujian model sistem yang
akan dilakukan terdiri dari lima bagian sebagai berikut.
1. Pengujian Water Flow Sensor
Pengujian ini bertujuan agar hasil keluaran water flow sensor yang
berupa sinyal pulsa linier terhadap debit air yang dideteksi. Gambar 3.9
menunjukkan sketsa pengujian water flow sensor dalam penelitian ini.
Pengontrol tinggi muka air digunakan untuk menjaga ketinggian
permukaan air pada penampung agar tetap pada nilai y±5 cm dengan
mengatur nyala dan matinya pompa air. Dalam hal ini, jika ketinggian
permukaan air kurang dari y maka pompa air akan dinyalakan dan jika

48
ketinggian permukaan air lebih dari y maka pompa air akan dimatikan.
Ketinggian permukaan air dijaga agar debit air yang akan mengalir pada
pipa tetap konstan, hal ini berdasarkan Persamaan 2.24 bahwa debit air
berbanding lurus dengan akar ketinggian permukaan air �� ≈ ���.
Gambar 3.9 Sketsa Pengujian Water Flow Sensor.
Debit air yang mengalir pada pipa diubah-ubah dengan memutar keran
pada sudut putaran 30°, 40º, 50º, 60°, 70º, 80º dan 90°. Debit air yang
dideteksi water flow sensor diukur secara manual dengan mengukur
lama waktu air mengisi wadah berukuran 1 liter, dalam hal ini
� =������ ����� (� �����)
����� (�����) .................................. (3.1)
dan hasil keluaran water flow sensor diukur menggunakan osiloskop.
Kemudian data hasil pengukuran debit air dan hasil keluaran water flow
sensor dicatat pada Tabel 3.1 berikut.
Tabel 3.1 Rancangan Data Pengujian Water Flow Sensor
θ (º) t (s) Q (cm3/s) Keluaran Osiloskop
Time/div λ (cm) Frekuensi (Hz)
30
40
50
60
70
80
90

49
2. Pengujian Rangkaian dan Program Mikrokontroler
Sinyal keluaran water flow sensor yaitu berupa sinyal pulsa, sinyal ini
harus diubah menjadi data frekuensi agar didapatkan nilai debit yang
dideteksi, hal ini sesuai dengan karekteristiknya yang ditunjukkan oleh
Gambar 2.15 pada Bab 2 bahwa debit fluida (liter/menit) linier terhadap
frekuensi keluaran sensor (Hz). Mikrokontroler ATmega 16 memiliki
modul Timer/Counter yang dapat mencacah pulsa yang masuk pada
PORTB.1. Dalam penelitian ini, modul Timer/Counter pada PORTB.1
mikrokontroler ATmega16 digunakan untuk mengubah sinyal pulsa
keluaran water flow sensor menjadi data frekuensi, kemudian
mengolahnya menjadi data debit air.
Gambar 3.10 Sketsa Pengujian Rangkaian dan Program
Mikrokontroler
Gambar 3.10 menunjukkan sketsa pengujian rangkaian dan program
mikrokontroler yang akan dilakukan dalam penelitian ini. Pengujian ini
bertujuan agar hasil pembacaan mikrokontroler linier terhadap masukan
data frekuensi. Data frekuensi yang digunakan sebagai masukan
mikrokontroler bersumber dari signal generator. Dalam pengujian
keluaran signal generator diatur pada rentang frekuensi 1 hingga 60 Hz,

50
hal ini bertujuan agar hasil pembacaan mikrokontroler akurasinya tinggi
dalam rentang frekuensi tersebut, dalam hal ini rentang frekuensi
tersebut merupakan karekteristik keluaran water flow sensor yang
ditunjukkan oleh Gambar 2.15 pada Bab 2.
Data hasil pembacaan mikrokontroler ditransmisikan ke komputer
menggunakan jaringan berbasis TCP/IP melalui modul WIZ110SR,
ditampilkan pada komputer menggunakan software Hyperteminal dan
dicatat pada Tabel 3.2, kemudian dibandingkan dengan hasil
pengukuran menggunakan osiloskop.
Tabel 3.2 Rancangan Data Pengujian Rangkaian dan Program Mikrokontroler
Masukan Keluaran
fSignal Generator (Hz) fOsiloskop (Hz) fmikrokontroler (Hz)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
25
30
35
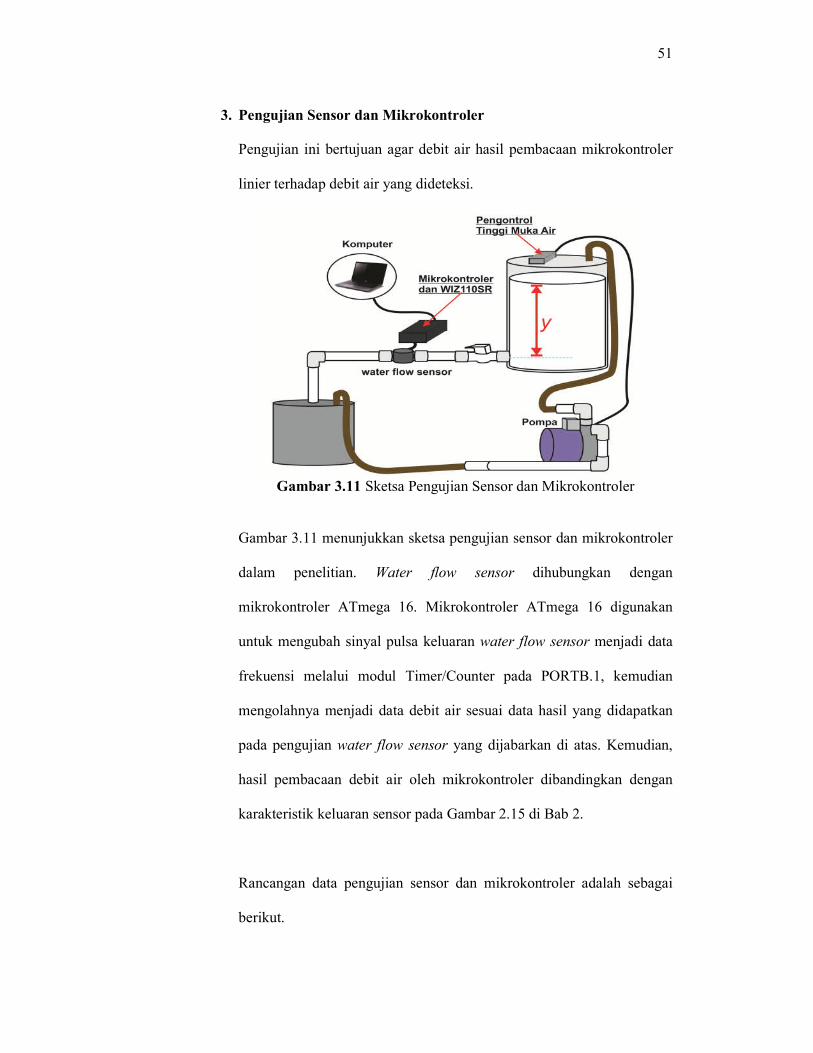
51
3. Pengujian Sensor dan Mikrokontroler
Pengujian ini bertujuan agar debit air hasil pembacaan mikrokontroler
linier terhadap debit air yang dideteksi.
Gambar 3.11 Sketsa Pengujian Sensor dan Mikrokontroler
Gambar 3.11 menunjukkan sketsa pengujian sensor dan mikrokontroler
dalam penelitian. Water flow sensor dihubungkan dengan
mikrokontroler ATmega 16. Mikrokontroler ATmega 16 digunakan
untuk mengubah sinyal pulsa keluaran water flow sensor menjadi data
frekuensi melalui modul Timer/Counter pada PORTB.1, kemudian
mengolahnya menjadi data debit air sesuai data hasil yang didapatkan
pada pengujian water flow sensor yang dijabarkan di atas. Kemudian,
hasil pembacaan debit air oleh mikrokontroler dibandingkan dengan
karakteristik keluaran sensor pada Gambar 2.15 di Bab 2.
Rancangan data pengujian sensor dan mikrokontroler adalah sebagai
berikut.
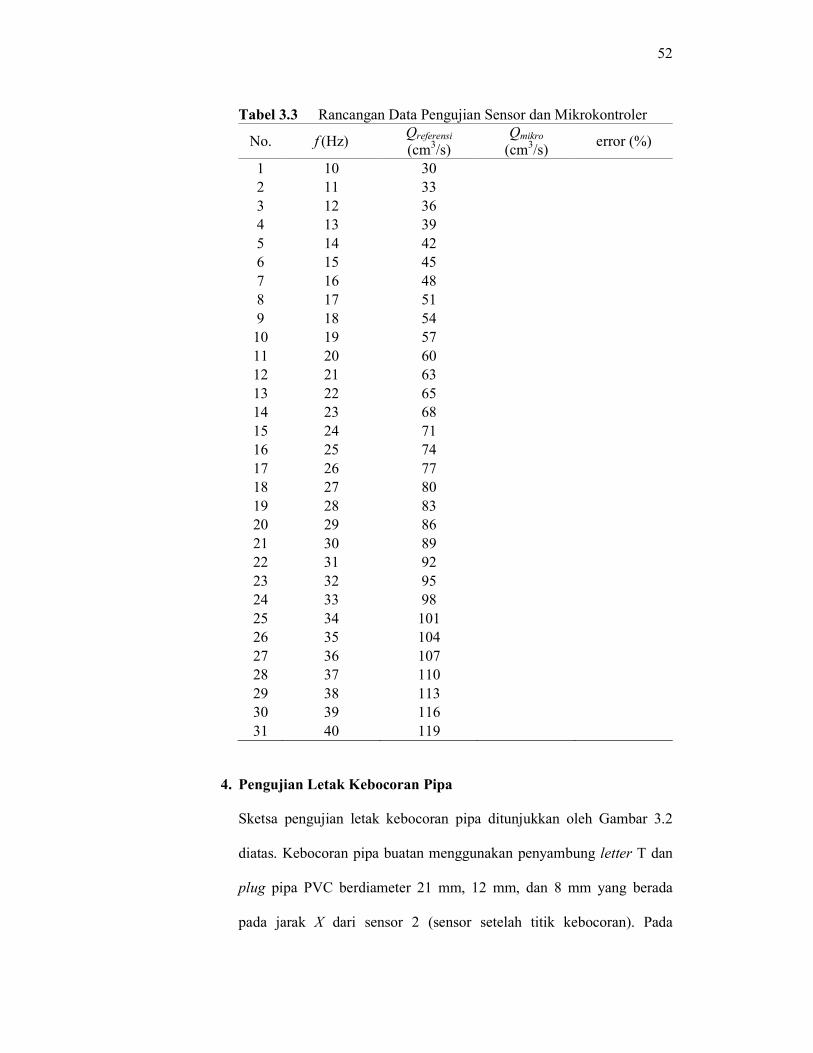
52
Tabel 3.3 Rancangan Data Pengujian Sensor dan Mikrokontroler
No. f (Hz) Qreferensi (cm3/s)
Qmikro
(cm3/s) error (%)
1 10 30
2 11 33
3 12 36
4 13 39
5 14 42
6 15 45
7 16 48
8 17 51
9 18 54
10 19 57
11 20 60
12 21 63
13 22 65
14 23 68
15 24 71
16 25 74
17 26 77
18 27 80
19 28 83
20 29 86
21 30 89 22 31 92
23 32 95 24 33 98
25 34 101 26 35 104
27 36 107 28 37 110
29 38 113 30 39 116
31 40 119
4. Pengujian Letak Kebocoran Pipa
Sketsa pengujian letak kebocoran pipa ditunjukkan oleh Gambar 3.2
diatas. Kebocoran pipa buatan menggunakan penyambung letter T dan
plug pipa PVC berdiameter 21 mm, 12 mm, dan 8 mm yang berada
pada jarak X dari sensor 2 (sensor setelah titik kebocoran). Pada
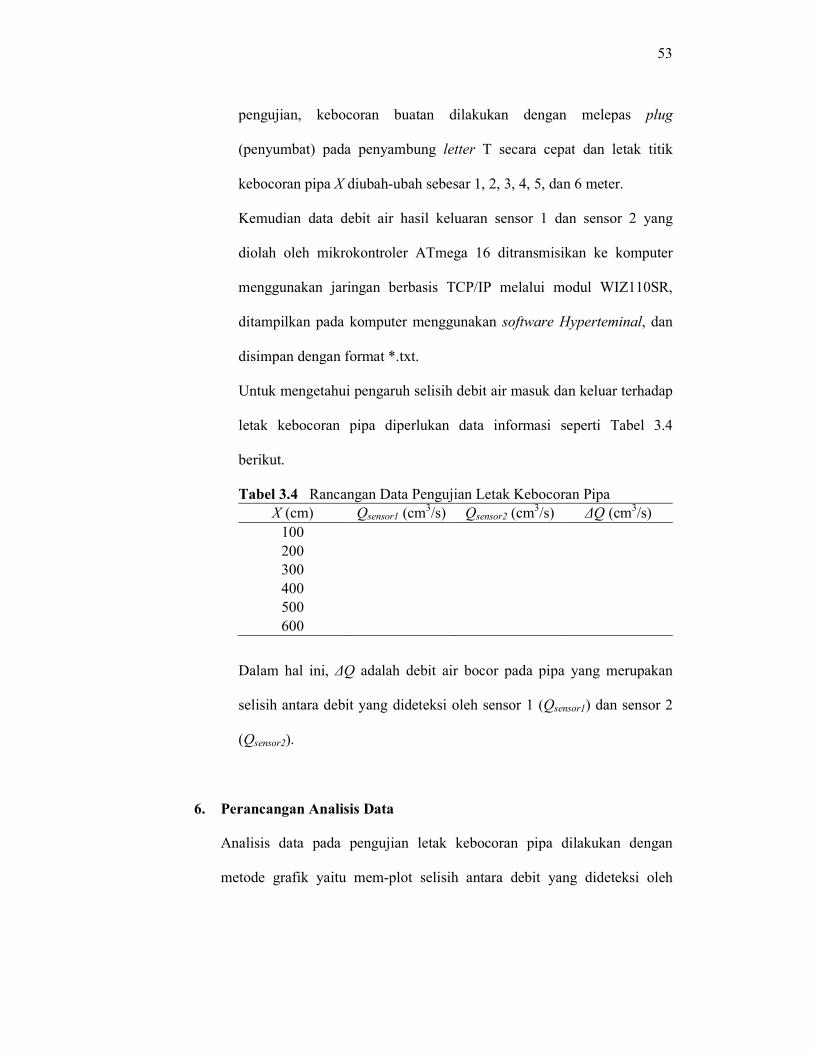
53
pengujian, kebocoran buatan dilakukan dengan melepas plug
(penyumbat) pada penyambung letter T secara cepat dan letak titik
kebocoran pipa X diubah-ubah sebesar 1, 2, 3, 4, 5, dan 6 meter.
Kemudian data debit air hasil keluaran sensor 1 dan sensor 2 yang
diolah oleh mikrokontroler ATmega 16 ditransmisikan ke komputer
menggunakan jaringan berbasis TCP/IP melalui modul WIZ110SR,
ditampilkan pada komputer menggunakan software Hyperteminal, dan
disimpan dengan format *.txt.
Untuk mengetahui pengaruh selisih debit air masuk dan keluar terhadap
letak kebocoran pipa diperlukan data informasi seperti Tabel 3.4
berikut.
Tabel 3.4 Rancangan Data Pengujian Letak Kebocoran Pipa X (cm) Qsensor1 (cm3/s) Qsensor2 (cm3/s) ΔQ (cm3/s)
100
200
300
400
500
600
Dalam hal ini, ΔQ adalah debit air bocor pada pipa yang merupakan
selisih antara debit yang dideteksi oleh sensor 1 (Qsensor1) dan sensor 2
(Qsensor2).
6. Perancangan Analisis Data
Analisis data pada pengujian letak kebocoran pipa dilakukan dengan
metode grafik yaitu mem-plot selisih antara debit yang dideteksi oleh

54
sensor 1 (Qsensor1) dan sensor 2 (Qsensor2) terhadap letak titik kebocoran pipa
X seperti ditunjukkan Gambar 3.12.
Gambar 3.12 Grafik Hubungan Debit yang Dideteksi Terhadap Letak
Titik Kebocoran Pipa X.
Hasil plot dari hubungan selisih debit air yang dideteksi terhadap letak titik
kebocoran pipa X dihampiri dengan suatu trendline, persamaan trendline
tersebut akan dijadikan sebagai fungsi untuk mengubah selisih debit air
masuk dan keluar (ΔQ) menjadi letak kebocoran pipa (X). Data hasil
persamaan garis dari hubungan debit yang dideteksi terhadap letak titik
kebocoran pipa X pada Gambar 3.12 diklasifikasikan berdasarkan diameter
lubang kebocoran yaitu 21 mm, 12 mm, dan 8 mm. Kemudian, data-data
tersebut saling dibandingkan untuk mendapatkan persamaan matematis
yang tepat dalam menentukan letak titik kebocoran pipa menggunakan
data hasil debit yang dideteksi oleh sensor 1 (Qsensor1) dan sensor 2
(Qsensor2) pada penelitian ini.
0
100
200
300
400
500
600
50 60 70 80 90 100
X (
cm)
ΔQ (cm3/s)

90
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Berdasarkan hasil penelitian dan analisis yang dilakukan diperoleh
kesimpulan sebagai berikut.
1. Debit air masuk meningkat sebesar 36% pada diameter lubang bocor 21
mm, 34% pada diameter lubang bocor 12 mm, dan 22% pada diameter
lubang bocor 8 mm setelah pipa mengalami kebocoran.
2. Debit air keluar mengalami penurunan setelah terjadi kebocoran pada pipa,
jika semakin kecil nilai selisih debit air masuk dan keluar (ΔQ), maka akan
semakin jauh letak kebocoran pipa yang diukur dari titik kebocoran ke
sensor setelah titik kebocoran (X).
3. Penurunan besar diameter lubang bocor sebesar 43% mengakibatkan
penurunan nilai selisih debit air masuk dan debit air keluar (ΔQ) rata-rata
sebesar 21% pada setiap letak kebocoran.
4. Perbandingan nilai selisih debit air masuk dan keluar (ΔQ) pada diameter
lubang 21 mm dan 12 mm adalah 5:4.
5. Teknologi water flow sensor dapat membedakan titik kebocoran pada pipa
dengan kemiringan 1º dan panjang 600 cm secara akurat.

91
B. Saran
Saran untuk penelitian selanjutnya yaitu:
1 menggunakan alat ukur debit air dengan resolusi yang lebih tinggi yaitu
minimum sebesar 0.1 cm3/s untuk mengetahui pengaruh selisih debit air
terhadap letak kebocoran pipa dengan diameter lubang bocor kurang dari
12 mm;
2 menggunakan objek penelitian selain pipa PVC seperti pipa besi untuk
mengetahui pengaruh jenis pipa terhadap debit air dan letak kebocoran;
3 menggunakan pipa dengan diameter berbeda-beda untuk mengetahui
pengaruh diameter pipa terhadap letak kebocoran;
4 menggunakan akuisisi data berbasis wireless untuk mengetahui letak titik
kebocoran pada jaringan pipa yang bercabang dan mencakup daerah yang
luas.

DAFTAR PUSTAKA
Atmel Co. 2010. ATmega16. Copyright 2010 Atmel Co., Ltd. All Rights Reserved.
Baghdadi, A. H. A. and Mansy. 1988. A Mathematical Model For Leak Location
In Pipelines. Application Mathematical Modeling. Vol. 12. Pp 25-30. Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroler
ATmega8535. Yogyakarta: Graha Ilmu. 27-44 hlm. Biksono, D. 2006. Karakteristik dan Visualisasi Aliran Dua Fasa pada Pipa Spiral.
Jurnal Teknik Mesin. Vol. 8, No. 2. 69-74 hlm. Heywood, D. 1996. Konsep dan Penerapan TCP/IP. Yogyakarta: Andi. 259-261
hlm. Kirom, H. I., Sumardi, dan Sudjadi. 2013. Sistem Monitoring Kebocoran Gas
LPG (Liquefied Petroleum Gas) Pada Smart Building Berbasis TCP/IP. Transient. Vol. 2, No. 2. 1-7 hlm.
Morris, A. S. 2001. Measurement and Instrumentation Principles. Oxford:
Butterworth-Heinemann. Pp 16-20. Munson, B., dan D. Young. 2004. Mekanika Fluida Edisi Keempat. Jakarta:
Erlangga. 140-141 hlm. Olson, R. M. 1993. Dasar-Dasar Mekanika Fluida Teknik Edisi Kelima. Jakarta:
Gramedia Pustaka Utama. 558-562 hlm. Rachmat, H. H., A. N. Indrawan, dan N. Syafitri. 2011. Pengembangan Sistem
Remote Control Untuk Setting Waktu Pada Sistem Automatic Time Switch (ATS) Berbasis Real Time Clock (RTC) DS1307 Untuk Saklar Lampu. Jurnal Rekayasa. Vol 15, No. 1. 4-7 hlm.
Sadeghioon, A. M., N. Metje, D. N. Chapman, and C. J. Anthony. 2014.
SmartPipes: Smart Wireless Sensor Networks for Leak Detection in Water Pipelines. Journal of Sensor and Actuator Networks. Vol. 3. Pp 64-78.
Santoso, B., Indarto, Deendarlianto, dan T. S. Widodo. 2013. Deteksi Kebocoran Pipa Pada Aliran Dua Fase Plug Menggunakan Analisis Fluktuasi Beda Tekanan. Jurnal Energi dan Manufaktur. Vol. 6, No.1. 1-8 hlm.
Serway, R. A., dan J. W. Jewett. 2009. Fisika Untuk Sains dan Teknik. Jakarta:
Salemba Teknika. 656-658 hlm. Siregar, K. T. T., T. Tamba, dan B. Perangin-angin. 2013. Viskosimeter Digital
Menggunakan Water Flow Sensor G1/2 Berbasis Mikrokontroler 8535. Jurnal Saintia Fisika. Vol. 4, No.1. 1-6 hlm.
Sood, R., M. Kaur, and H. Lenka. 2013. Design and Development of Automatic
Water Flow Meter. International Journal of Computer Science, Engineering and Applications. Vol. 3, No. 3. Pp 49-59.
Streeter, V. L. 1988. Mekanika Fluida. Jakarta: Erlangga. White, F. 1988. Mekanika Fluida. Jakarta: Erlangga. Wiznet Co. 2008. WIZ110SR User’s Manual (Version 2.1.0). Copyright 2008
WIZnet Co., Ltd. All Rights Reserved. Zain, R. H. 2013. Sistem Keamanan Ruangan Menggunakan Sensor Passive Infra
Red (PIR) Dilengkapi Kontrol Penerangan Pada Ruangan Berbasis Mikrokontroler ATmega8535 Dan Real Time Clock DS1307. Jurnal Teknologi Informasi dan Pendidikan. Vol.6, No. 1. 159-161 hlm.