pengukuran kerja tidak langsung - universitas...
TRANSCRIPT
Pengukuran Kerja
Tidak Langsung (Predetermined Motion-Time System)

Latar Belakang
Stop watch
harus terus menerus mengamati pekerjaan
Work sampling
butuh ratusan/ribuan pengamatan
Data waktu baku
hanya berlaku untuk kelompok pekerjaan sejenis
contoh : data baku pekerjaan pabrik tidak dapat
digunakan untuk pekerjaan kantor

Manfaat
1. Karena setiap elemen gerakan diketahui waktunya
(dalam tabel-tabel) maka waktu penyelesaian suatu
operasi dapat ditentukan sebelum pekerjaan dilaksanakan
2. Waktu baku suatu pekerjaan dapat ditentukan dengan singkat,
karena hanya mensintesa waktu dari elemen-
elemen gerakannya.
3. Hemat energi, waktu dan biaya
4. Dapat digunakan untuk mengembangkan metode
5. Dapat digunakan untuk membantu perancangan produk

Work Factor (Faktor Kerja)
Merupakan salah satu PMTS yang paling awal dan secara
luas diaplikasikan.
Sistem ini memungkinkan untuk menetapkan waktu
pekerjaan-pekerjaan manual dengan data waktu gerakan
yang ditetapkan
Ada 4 variabel yang diperhitungkan dalam menghitung
waktu dengan metode work factor, yaitu :
1. Anggota badan yang digunakan
2. Jarak yang ditempuh
3. Kontrol manusia
4. Berat atau tahanan yang menghambat
Work Factor (Faktor Kerja)
I. Anggota tubuh yang digunakan
Ada 6 faktor anggota tubuh yang diperhatikan, yaitu :
1. Jari atau telapak tangan (F/finger atau H/hand)
gerakan jari maupun telapak tangan yang bersumbu pada
pergelangan tangan.
2. Putaran Lengan (FS/ forearm swivel)
- lengan dibawah berputar pada sumbunya sementara siku ditekuk.
- seluruh tangan berputar pada sumbunya dengan berpangkal pada
bahu dan siku tidak ditekuk,
- kombinasi antara keduanya.
3. Lengan (A/ arm)
- lengan bawah bergerak dengan sumbu siku,
- seluruh lengan bergerak dengan sumbu bahu kombinasi keduanya

Work Factor (Faktor Kerja)
4. Badan bagian atas (T/ trunk)
Gerakan badan bagian atas dapat berupa gerakan kedepan,
kebelakang, kesamping ataupun berputar
5. Telapak kaki (F/foot)
Bila telapak kaki bergerak mengerjakan sesuatu, seperti ketika
menginjak pedal gas kendaraan
6. Kaki (L/Leg)
Bila seluruh kaki (tidak sekedar telapak kaki saja) bergerak
untuk melaksanakan kerja tertentu

II. Kontrol Manual Kontrol terhadap suatu gerakan mempengaruhi lamanya
gerakan.
Semakin besar kontrol diperlukan, semakin lama waktu yang
dibutuhkan. Besar kecil kontrol dipengaruhi beberapa
faktor yaitu :
1. Perhentian yang pasti (D)
2. Pengarahan (S)
3. Kehati-hatian (P)
4. Perubahan arah gerak (U)
Work Factor (Faktor Kerja)
III. Berat atau Tahanan (W) Adalah tahanan yang harus diatasi dan berat benda yang
dipindahkan. Tahanan terjadi, misalnya pada pekerjaan mendorong
sebuah kotak pada sebuah meja atau menekan sebuah peda gas.
IV. Jarak Jarak lurus antara titik dimulainya gerakan sampai titik berhentinya
------------------------------------------------
Dalam metode Work Factor, yang diperhatikan bukan macam faktor
kerja yang terlibat, tetapi banyaknya. Jadi bukan faktor kerja mana
yang berpengaruh tetapi berapa faktor kerja yang terlibat.
Semakin banyak faktor kerja terlibat, semakin lama waktu
penyelesaian suatu pekerjaan

Work Factor (Faktor Kerja)
Description of Motion Motion
Analysis
Time
(Minutes)
1. Toss Small part aside 10 inches (basic motion) A 10 0,0042
2. Reach 20 inches to bolt in bin (definite stop motion) A 20 D 0,0080
3. Move 4 pound brick 30 inches from pile to place on
worktable (weight, definite stop motion) A 30 WD 0,0119
Contoh

Work Factor (Faktor Kerja)

Work Factor (Faktor Kerja)
Work Factor (Faktor Kerja)
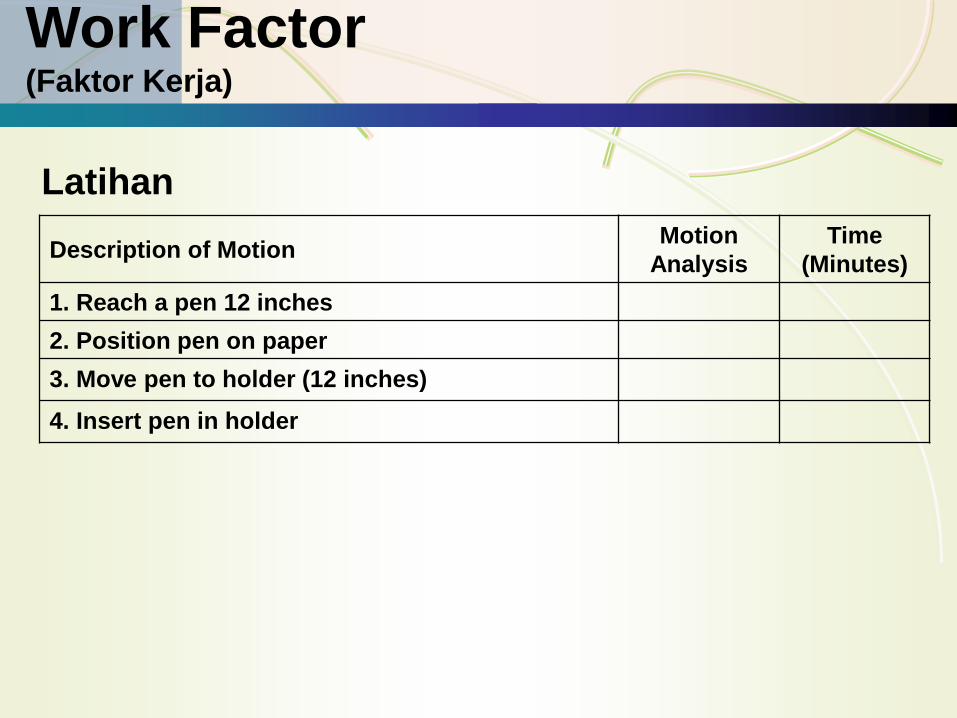
Description of Motion Motion
Analysis
Time
(Minutes)
1. Reach a pen 12 inches
2. Position pen on paper
3. Move pen to holder (12 inches)
4. Insert pen in holder
Latihan

Work Factor (Faktor Kerja)
Description of Motion Motion
Analysis
Time
(Minutes)
1. Reach a pen (12 inches) A 12 D 0,0065
2. Position pen on paper F 1 SD 0,0029
3. Move pen to holder (12 inches) A 12 SD 0,0085
4. Insert pen in holder F 1 P 0,0023
Jawaban

Maynard Operation
Sequence Technique (MOST)
Konsep Dasar :
Kerja adalah perpindahan obyek
Karena memindahkan obyek bisa secara
manual atau dengan peralatan maka ada
2 model MOST :
1. Model-Model Urutan Dasar (The Basic Sequence Models)
2. Model-Model Urutan Penanganan Peralatan (The Equipment Handling Sequence Models).
The Basic Sequence Models
Model-model urutan dasar terdiri atas tiga model, yaitu :
1. Urutan Gerakan Umum (The General Move Sequence)
2. Urutan Gerakan Terkendali (The Controlled Move Sequence)
3. Urutan Pemakaian Perlatan (The Tool Use Sequence)
1. Urutan gerakan umum Model ini dipakai jika terjadi perpindahan obyek dengan
bebas. Artinya, dibawah kendali manual, obyek
berpindah tanpa hambatan.
Contoh : sebuah kotak diangkat (dipindahkan) dari
bawah meja ke atas meja
The Basic Sequence Models
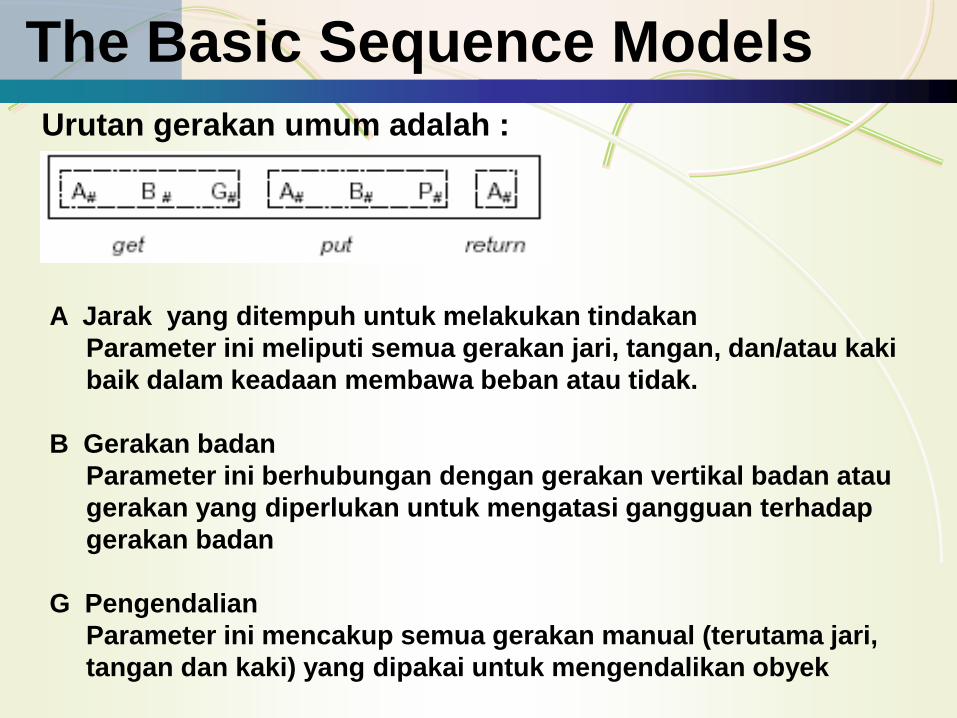
Urutan gerakan umum adalah :
A Jarak yang ditempuh untuk melakukan tindakan
Parameter ini meliputi semua gerakan jari, tangan, dan/atau kaki
baik dalam keadaan membawa beban atau tidak.
B Gerakan badan
Parameter ini berhubungan dengan gerakan vertikal badan atau
gerakan yang diperlukan untuk mengatasi gangguan terhadap
gerakan badan
G Pengendalian
Parameter ini mencakup semua gerakan manual (terutama jari,
tangan dan kaki) yang dipakai untuk mengendalikan obyek

The Basic Sequence Models
P Menempatkan
Parameter ini merupakan tahap akhir dari kegiatan memindahkan,
yaitu dengan “mengatur” sebelum melepaskan kendali terhadap
obyek tersebut
m A B G A B P A GENERAL MOVE
A B G P INDEX
Action
Distance Body Motion Gain Control Place
INDEX
0 ? 2 in
? 5 cm
HOLD TOSS
0
1 within
reach
LIGHT OBJECT
LIGHT OBJECTS SIMO
LAY ASIDE
LOOSE FIT 1
3 1 – 2 STEPS
BEND AND ARISE
50 % OCC
NON SIMO HEAVY OR BULKY
BLIND OR OBSTRUCTED
DISENGEAGE INTERLOCKED
COLLECT
ADJUSTMENTS LIGHT PRESSURE
DOUBLE 3
6 3 – 4 STEPS
BEND AND ARISE
CARE OR PRECISION HEAVY PRESSURE
BLIND OR OBSTRUCTED
INTERMEDIATE MOVES
6
10 5 – 7 STEPS
SIT OR STAND
10
16 8 – 10
STEPS
THROUGH
DOOR CLIMB
ON OR OFF
16

The Basic Sequence Models
Contoh : seorang operator mesin mengambil benda kerja dari meja kerja dan
meletakkannya pada sebuah palet. Dengan asumsi operator berdiri
dekat benda kerja, dimana benda kerja tersebut ringan, palet berada
pada jarak 10 langkah dari operator dan terletak di lantai.
Maka urutan model adalah :
A1 B0 G1 A16 B6 P1 A16
Waktu = (1 + 0 + 1 + 16 + 6 + 1 + 16) x 10
= 410 TMU (1 TMU = 0,036 detik).
= 410 x 0,036 = 14,76 detik.

The Basic Sequence Models
2. Urutan Gerakan Terkendali Model ini menggambarkan perpindahan obyek
secara manual “dikendalikan” oleh suatu jalur.
Gerakan obyek dibatasi sedikitnya satu arah karena
kontak atau menempel dengan obyek lainnya.
Contoh : kotak yang cukup berat didorong diatas
meja kerja
Urutan gerakan terkendali adalah :
M Gerakan Terkendali
Parameter ini mencakup semua gerak manual yang diarahkan
atau gerakan dari obyek dalam jalur yang terkendali
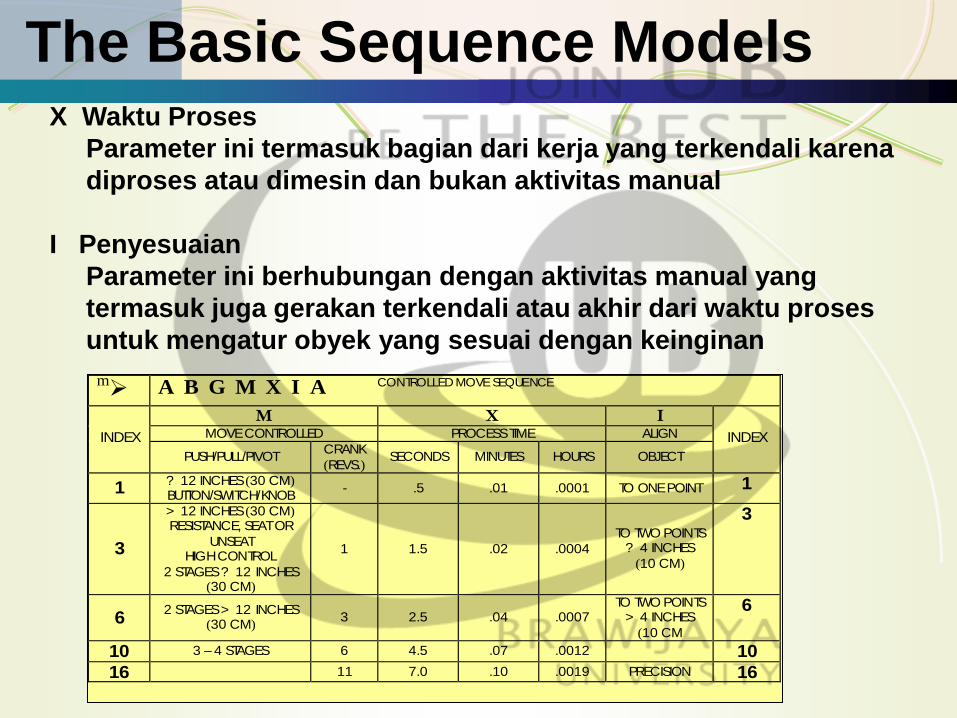
The Basic Sequence Models X Waktu Proses
Parameter ini termasuk bagian dari kerja yang terkendali karena
diproses atau dimesin dan bukan aktivitas manual
I Penyesuaian
Parameter ini berhubungan dengan aktivitas manual yang
termasuk juga gerakan terkendali atau akhir dari waktu proses
untuk mengatur obyek yang sesuai dengan keinginan
m A B G M X I A CONTROLLED MOVE SEQUENCE
M X I MOVE CONTROLLED PROCESS TIME ALIGN INDEX
PUSH/PULL/PIVOT CRANK
(REVS.) SECONDS MINUTES HOURS OBJECT
INDEX
1 ? 12 INCHES (30 CM) BUTTON/SWITCH/KNOB
- .5 .01 .0001 TO ONE POINT 1
3
> 12 INCHES (30 CM) RESISTANCE, SEAT OR
UNSEAT HIGH CONTROL
2 STAGES ? 12 INCHES (30 CM)
1 1.5 .02 .0004
TO TWO POINTS ? 4 INCHES
(10 CM)
3
6 2 STAGES > 12 INCHES
(30 CM) 3 2.5 .04 .0007
TO TWO POINTS > 4 INCHES
(10 CM
6
10 3 – 4 STAGES 6 4.5 .07 .0012 10
16 11 7.0 .10 .0019 PRECISION 16

The Basic Sequence Models
Contoh : Seorang operator meraih sebuah karton yang berat dengan
tangannya kemudian mendorong sejauh 45 cm diatas konveyor.
Urutan modelnya adalah :
A1 B0 G3 M3 X0 I0 A0
Waktu = (1 + 3 + 3) x 10
= 70 TMU (1 TMU = 0,036 detik).
= 70 x 0,036 = 2,52 detik.
The Tool Use Sequence Models
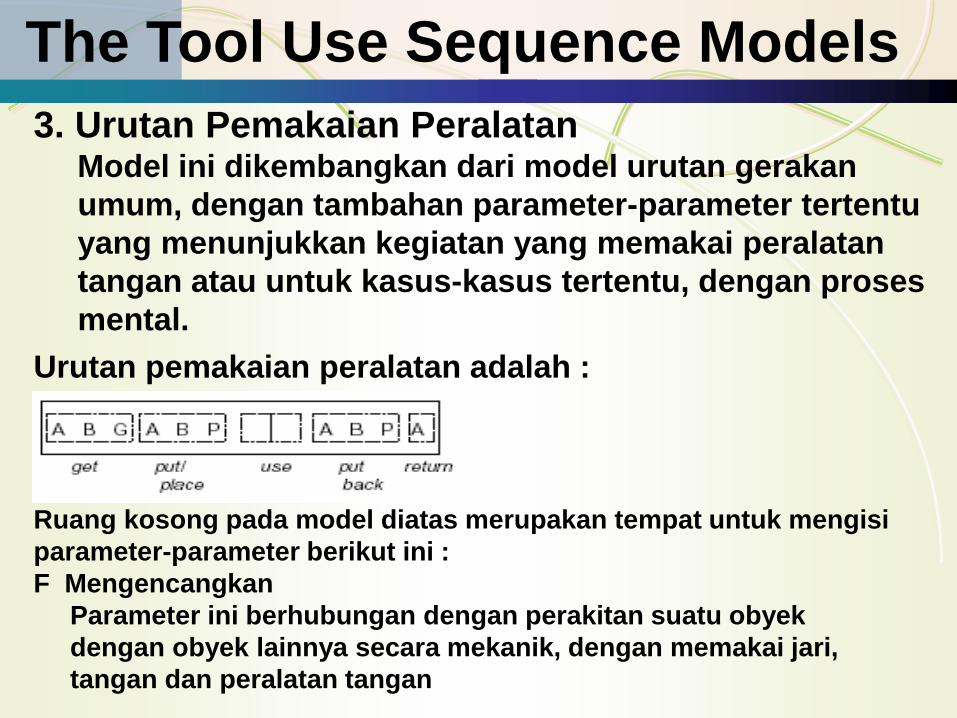
3. Urutan Pemakaian Peralatan Model ini dikembangkan dari model urutan gerakan
umum, dengan tambahan parameter-parameter tertentu
yang menunjukkan kegiatan yang memakai peralatan
tangan atau untuk kasus-kasus tertentu, dengan proses
mental.
Urutan pemakaian peralatan adalah :
Ruang kosong pada model diatas merupakan tempat untuk mengisi
parameter-parameter berikut ini :
F Mengencangkan
Parameter ini berhubungan dengan perakitan suatu obyek
dengan obyek lainnya secara mekanik, dengan memakai jari,
tangan dan peralatan tangan

The Tool Use Sequence Models
L Melonggarkan
Parameter ini berhubungan dengan melepas rakit suatu obyek
dengan obyek lainnya secara mekanik dengan memakai jari,
tangan dan peralatan tangan
C Memotong
Parameter ini menggambarkan aktivitas manual untuk memisahkan,
membagi atau membuang bagian dari obyek dengan menggunakan
bagian yang tajam dari perkakas tangan
M Mengukur
Parameter ini berhubungan dengan kegiatan untuk menentukan
karakteristik fisik tertentu dari suatu obyek dengan
membandingkannya dengan alat ukur standar
R Mencatat
Parameter ini mencakup kegiatan manual dengan pinsil, pena,
kapur atau alat tulis lainnya dengan maksud mencatat informasi
The Tool Use Sequence Models
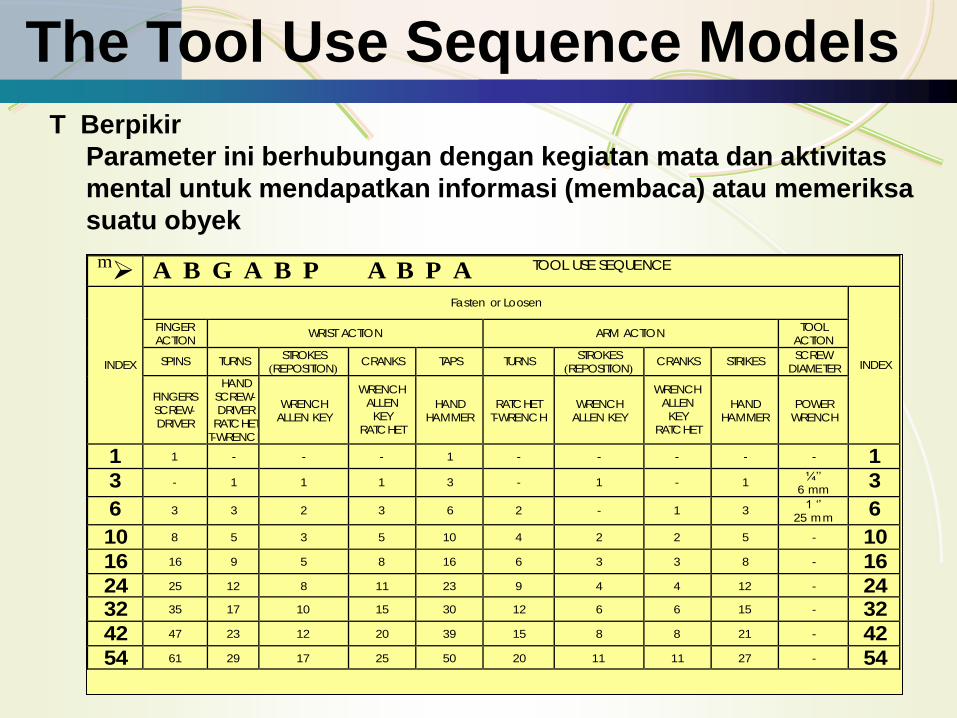
T Berpikir
Parameter ini berhubungan dengan kegiatan mata dan aktivitas
mental untuk mendapatkan informasi (membaca) atau memeriksa
suatu obyek
m A B G A B P A B P A TOOL USE SEQUENCE
Fasten or Loosen
FINGER ACTION
WRIST ACTION ARM ACTION TOOL
ACTION
SPINS TURNS STROKES
(REPOSITION) CRANKS TAPS TURNS
STROKES (REPOSITION)
CRANKS STRIKES SCREW
DIAMETER INDEX
FINGERS SCREW- DRIVER
HAND SCREW-DRIVER
RATCHET T-WRENCH
WRENCH ALLEN KEY
WRENCH ALLEN KEY
RATCHET
HAND HAMMER
RATCHET T-WRENCH
WRENCH ALLEN KEY
WRENCH ALLEN KEY
RATCHET
HAND HAMMER
POWER WRENCH
INDEX
1 1 - - - 1 - - - - - 1
3 - 1 1 1 3 - 1 - 1 ¼’’
6 mm 3
6 3 3 2 3 6 2 - 1 3 1 ‘’
25 mm 6
10 8 5 3 5 10 4 2 2 5 - 10
16 16 9 5 8 16 6 3 3 8 - 16
24 25 12 8 11 23 9 4 4 12 - 24 32 35 17 10 15 30 12 6 6 15 - 32
42 47 23 12 20 39 15 8 8 21 - 42
54 61 29 17 25 50 20 11 11 27 - 54
The Tool Use Sequence Models
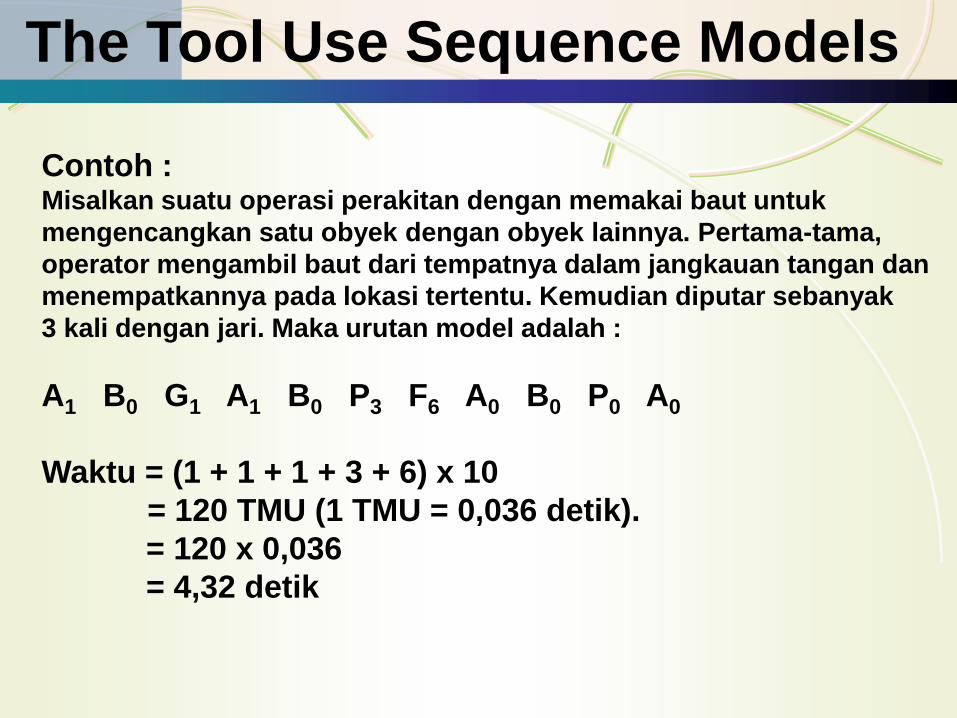
Contoh : Misalkan suatu operasi perakitan dengan memakai baut untuk
mengencangkan satu obyek dengan obyek lainnya. Pertama-tama,
operator mengambil baut dari tempatnya dalam jangkauan tangan dan
menempatkannya pada lokasi tertentu. Kemudian diputar sebanyak
3 kali dengan jari. Maka urutan model adalah :
A1 B0 G1 A1 B0 P3 F6 A0 B0 P0 A0
Waktu = (1 + 1 + 1 + 3 + 6) x 10
= 120 TMU (1 TMU = 0,036 detik).
= 120 x 0,036
= 4,32 detik

Exercise
Maynard Operation
Sequence Technique (MOST)
Hitung waktu penyelesaian pekerjaan tersebut dengan
MOST

Answer
Maynard Operation
Sequence Technique (MOST)

Method Time Measurement(MTM) (Pengukuran Waktu Metode)
Waktu gerakan dalam MTM dinyatakan dalam TMU (Time
Measurement Unit/satuan pengukuran waktu) sbb :
MTM membagi gerakan-gerakan kerja atas elemen-elemen
gerakan sbb :
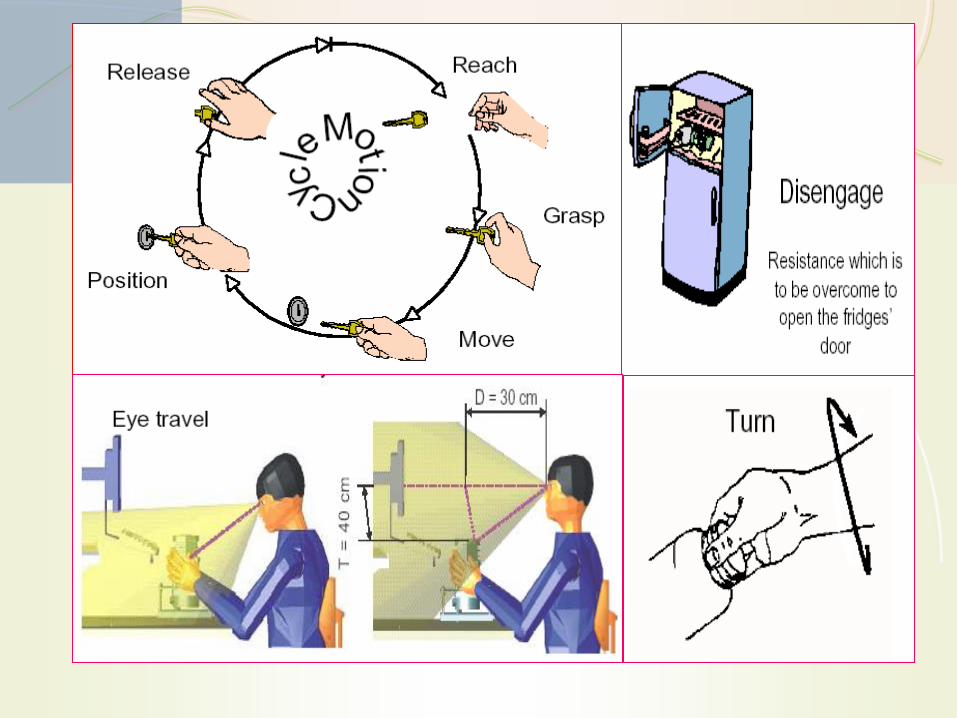
1. Menjangkau (Reach)
gerakan untuk memindahkan tangan atau jari ke suatu
tempat tujuan. Menjangkau dibagi dalam 5 kelas A, B,
C, D, E

Reach
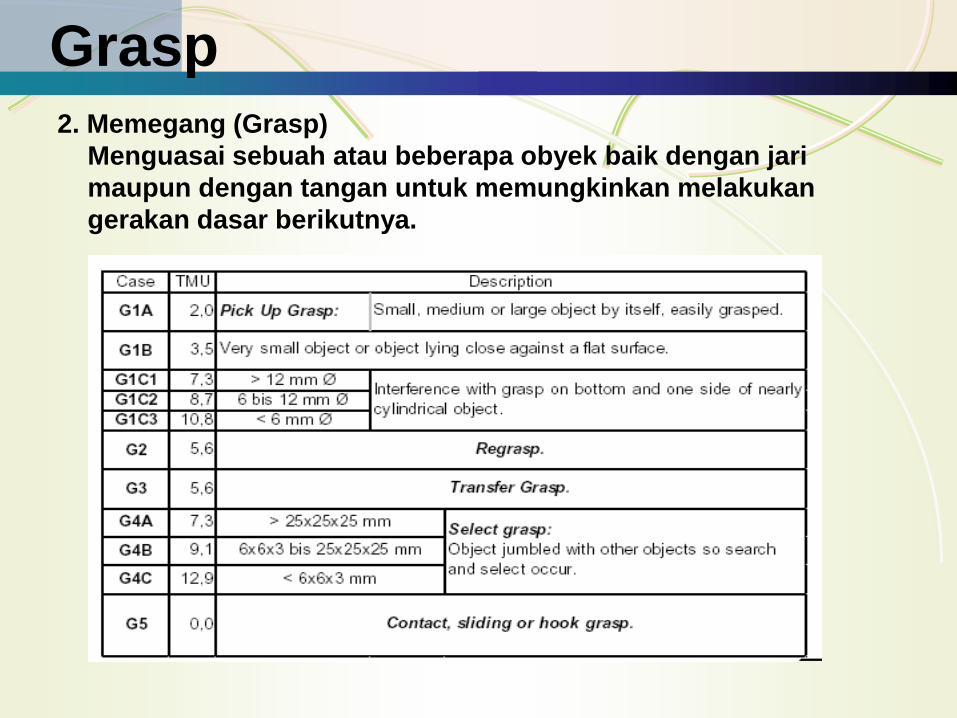
Grasp 2. Memegang (Grasp)
Menguasai sebuah atau beberapa obyek baik dengan jari
maupun dengan tangan untuk memungkinkan melakukan
gerakan dasar berikutnya.

Grasp
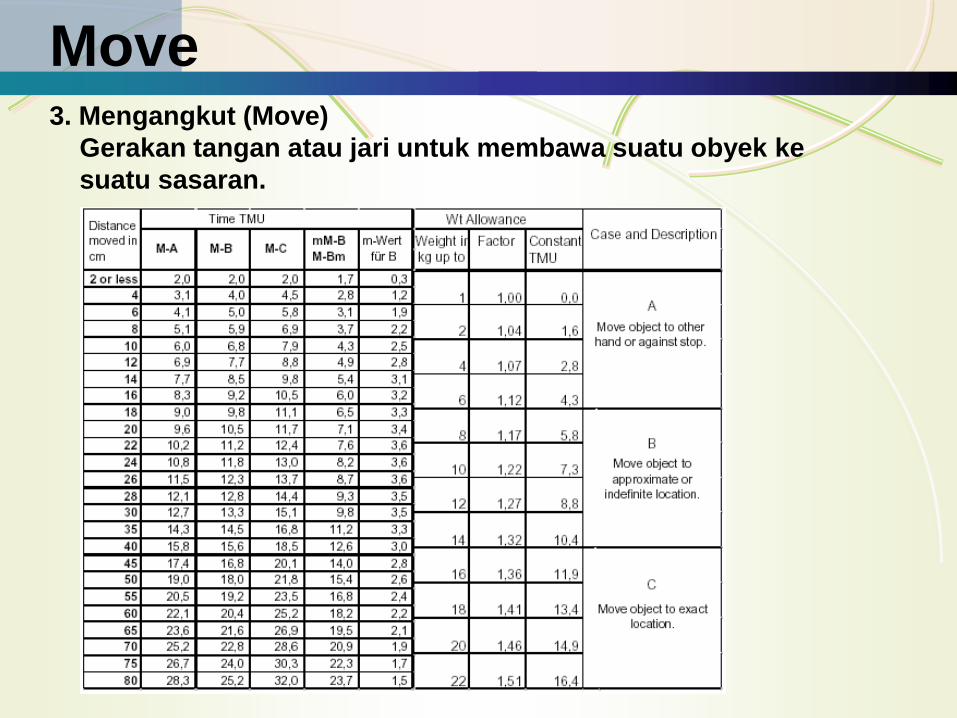
Move 3. Mengangkut (Move)
Gerakan tangan atau jari untuk membawa suatu obyek ke
suatu sasaran.
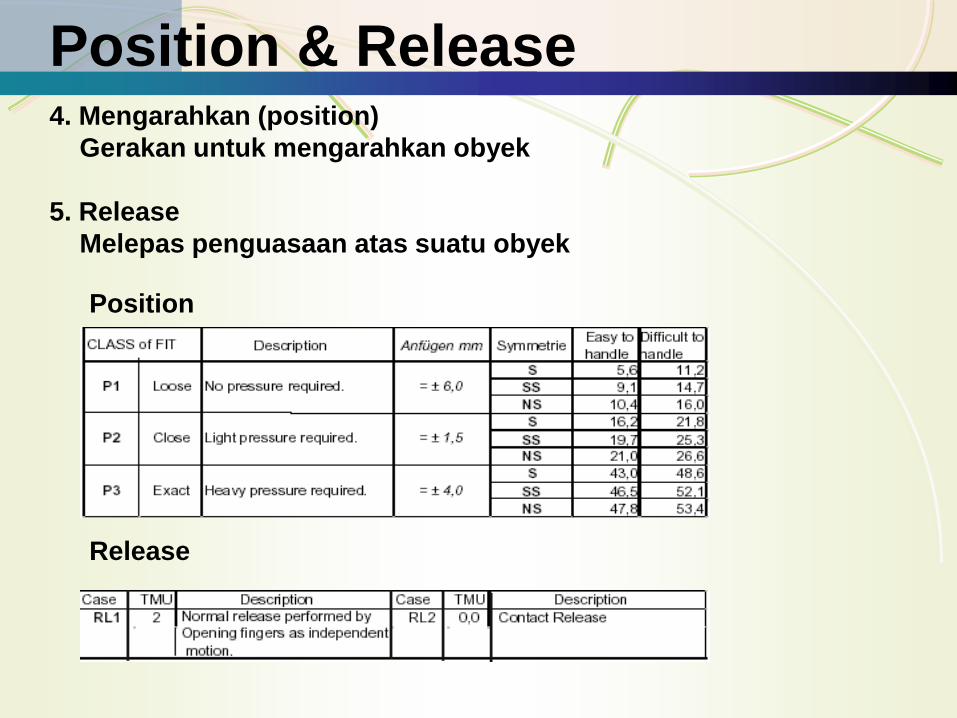
Position & Release 4. Mengarahkan (position)
Gerakan untuk mengarahkan obyek
5. Release
Melepas penguasaan atas suatu obyek
Position
Release

Turn & Disengage 6. Memutar (turn)
Memutar tangan dalam keadaan kosong maupun dengan beban
7. Lepas Rakit (disengage)
Memisah obyek dengan obyek lain
Disengage

Eye, body, leg and foot