pengendali tekanan pada ketel uap dengan …
TRANSCRIPT

PENGENDALI TEKANAN PADA KETEL UAP DENGAN MENGGUNAKAN
PENGENDALI PI
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Denny Christanto
NIM : 025114026
PROGRAM STUDI TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK UNIVERSITAS SANATA DHARMA
YOGYAKARTA 2007
1
BOILER PRESSURE CONTROLLER USING IP CONTROLLER
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Denny Christanto
Student Number : 025114026
ELECTRICAL ENGINEERING STUDY PROGRAM DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING SANATA DHARMA UNIVERSITY
YOGYAKARTA 2007
2
3

4

HALAMAN PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta 20 Oktober 2007
Denny Christanto
5

HALAMAN PERSEMBAHAN
Kupersembahkan karya tulis ini kepada :
Tuhan Yesus Kristus, yang selalu melindungi diriku
Bapak dan Ibu Tercinta atas semangat, doa, serta
dukungan secara moril maupun materiil
Saudara terkasih, Wisnu Yoga Wardana
Kekasihku, Budi Tri Utami
Almamaterku Teknik Elektro, khususnya angkatan
2002
6

HALAMAN MOTTO
Berdoa dan bekerja
Pengalaman adalah guru yang terbaik
Kegagalan adalah sukses yang tertunda
Buku adalah gudang ilmu
Uang mudah dicari tetapi sahabat susah dicari dan takkan terlupakan
7

Pengendali Tekanan Pada Ketel Uap Dengan Menggunakan Pengendali PI
Nama : Denny Christanto
NIM : 025114026
INTISARI
Tugas akhir ini mendeskripsikan tentang Pengendali Tekanan Pada Ketel Uap Dengan Menggunakan Pengendali PI yang menggunakan sensor tekanan, pemanas dan Boiler untuk mendapatkan tekanan yang stabil yang sesuai dengan tekanan yang diinginkan. Pengendali Tekanan Pada Ketel Uap Dengan Menggunakan Pengendali PI diimplementasikan dengan menggunakan metode Ziegler-Nichols. Masukan dari pengendali Proporsional Integral adalah selisih tegangan antara set point dengan feedback ( sensor ). Dari hasil selisih itu kemudian digunakan untuk mengendalikan pemanas yang akan berakibat pada tekanan yang dihasilkan. Pada implementasi, terdapat 3 nilai level tegangan ( Set Point ) dengan besar tegangan yang berbeda-beda. Pemilihan level tegangan dilakukan dengan memutar Rotary Switch. Setelah dilakukan percobaan ternyata sistem yang telah dibuat dan dikerjakan tidak dapat berjalan sesuai dengan tujuan dan manfaat yang diharapkan.Sistem yang telah dibuat tidak dapat mengendalikan dan menjaga kestabilan tekanan yang ada dalam Boiler. Kata kunci : Pengendali Tekanan Pada Ketel Uap Dengan Menggunakan Pengendali
PI, level tegangan, terkendali Proporsional Integral kalang tertutup, Ziegler-Nichols, Rotary Switch.
8
PRESSURE CONTROLLER at STEAMING BOILER
BY USING CONTROLLER PI
Nama : Denny Christanto NIM : 025114026
ABSTRACT
This Final Duty is about Pressure Controller at Steaming Boiler By Using Controller PI using pressure sensor, heater and Boiler to get the stable pressure matching with wanted pressure.
Pressure Controller At Steaming Boiler By Using Controller of PI implementation by using method Ziegler-Nichols. Input from Proporsional Integral controller is tension difference between setting point by feedback ( sensor ). From that difference result then used to control the heater to cause pressure yielded. At implementation, there are 3 value of level tension ( Set the Point ) which different each other. Election of tension level conducted by turning around rotary switch.
After tried, system which have been made and done cannot walk in line with and expected benefit. In the reality control system which have been made cannot control and take care of the existing pressure stability in Boiler
Keyword : Pressure Controller At Steaming Boiler By Using Controller PI, tension
level, Proporsional Integral control of underlayer closed, Ziegler-Nichols, Rotary Switch.
9

LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma Nama : Denny Christanto Nomor Mahasiswa : 025114026 Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul: PENGENDALI TEKANAN PADA KETEL UAP DENGAN MENGGUNAKAN PENGENDALI PI beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis. Demikian pernyataan ini yang saya buat dengan sebenarnya. Dibuat di Yogyakarta Pada tanggal : 28 Februari 2008 Yang menyatakan
(Denny Christanto)
10

KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, karena atas
kasih karunia-Nya penulis akhirnya dapat menyelesaikan tugas akhir ini dengan baik
dan lancar.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya masing-
masing sehingga tugas akhir ini dapat terselesaikan. Oleh karena itu penulis ingin
mengucapkan terima kasih antara lain kepada :
1. Tuhan Yesus Kristus, karena lindunganNya hingga hari ini penulis dapat
menikmati segala bentuk ciptaanNya.
2. Bapak dan Ibu serta saudara saudariku tercinta atas semangat, doa serta
dukungan secara moril maupun materiil.
3. Bapak Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc., selaku dekan fakultas
teknik.
4. Bapak Bayu Primawan, S.T., M.Eng., selaku ketua jurusan teknik elektro
5. Ibu B. Wuri Harini, S.T., M.T., selaku pembimbing I atas ide-ide yang berguna,
bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas
akhir ini bisa selesai.
6. Bapak Ir. Tjendro, selaku pembimbing II yang telah bersedia meluangkan waktu
serta memberikan bimbingan dan saran yang tentunya sangat berguna untuk
tugas akhir ini.
11

7. Seluruh dosen Teknik Elektro atas ilmu yang telah diberikan selama penulis
menimba ilmu di Universitas Sanata Dharma.
Budi Tri Utami,8. kekasih yang selalu memberikan dukungan dan support moril
, Andis, Ido.
.
bil data.
h jauh dari
san i dapat bermanfaat bagi semua
pihak.
9. Teman-teman satu bimbingan TA: Tcus, Harek’s, Lele, Dani, Yoga, Sinung ,
Deri, Plentonk, Andek, Widi, Clement, Gepeng
10. Teman-teman angkatan ’02 yang selalu berbagi cerita dan bersama dalam kuliah
11. Mas Sur, Mas Mardi, Mas Broto selaku laboran yang telah mengizinkan
membuka Lab sewaktu-waktu jika diperlukan untuk mengam
12. Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini
yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masi
sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini
gat diharapkan. Akhir kata, semoga tugas akhir in
Terima kasih.
Yogyakarta, 20 Oktober 2007
Penulis
12

DAFTAR ISI
Halaman
JUDUL ....................................................................................................i
HALAMAN PERSETUJUAN ............................................................iii
BAB I. PENDAHULUAN I. 1
I. 2 Tujuan dan Manfaat ................................................................................2
........................................................................2
BA
II. 2 Boiler .....................................................................................................8
..........................................................................9
HALAMAN PENGESAHAN ..............................................................iv
HALAMAN PERNYATAAN KEASLIAN KARYA .........................v
HALAMAN PERSEMBAHA .............................................................vi
HALAMAN MOTTO .........................................................................vii
INTISARI ...........................................................................................viii
ABSTRACT ..........................................................................................ix
KATA PENGANTAR ...........................................................................x
DAFTAR ISI........................................................................................xii
DAFTAR GAMBAR ...........................................................................xv
DAFTAR TABEL .............................................................................xvii
Latar Belakang........................................................................................1
I. 3 Batasan Masalah .............
I. 4 Metodologi Penelitian.............................................................................3
I. 5 Sistematika Penulisan .............................................................................5
B II. DASAR TEORI II. 1 Aturan Ziegler-Nichols..........................................................................6
II. 3 Sensor ..........................
II. 4 Pengendali ...........................................................................................11
13

II. 4. 1 Rangkaian Proporsional..........................................................11
II. 4. 2 Rangkaian Integral..................................................................12
II. 4. 3 Rangkaian PI ..........................................................................13
II. 5 Triac Driver.........................................................................................15
II. 6 T
II. 7 P
BAB IIIII. 1
I. 3 Plant ...................................................................................................28
..................................................................31
III.
III.
III.
BA
IV. 2. 1 Analisis Plant...........................................................................48
riac ....................................................................................................16
enguat Instrumentasi .........................................................................18
II. 7. 1 Rangkaian Penguat Beda........................................................18
II. 7. 2 Rangkaian Penguat Tegangan ................................................19
II. 8 PWM ...................................................................................................20
I. PERANCANGAN Pengendali Secara Umum ..................................................................24
III. 2 Penyepadanan Alat-Alat Kontrol PI...................................................25
II
III. 4 Sensor Tekanan ................
III. 5 Set Point .............................................................................................32
III. 6 Pengendali ..........................................................................................34
III. 6. 1 Pengendali Proporsional...........................................................35
III. 6. 2 Pengendali Integral ..................................................................36
III. 6. 3 Pengendali PI ...........................................................................37
III. 7 Current To Voltage Converter ...........................................................39
8 Rangkaian Deteksi Error ...................................................................40
9 PWM ..................................................................................................41
10 Interfacing Triac ..............................................................................43
B IV. HASIL PENGAMATAN DAN PEMBAHASAN IV. 1 Kinerja Plant ......................................................................................46
IV. 2 Pengamatan dan Analisis ...................................................................47
14

IV. 2. 2 Analisis Pengendali..................................................................49
BAB V. PV. 1 Ke
V. 2 Sa
LA
IV. 2. 2. 1 Analisis Set Point ...........................................................49
IV. 2. 2. 2 Analisis Rangkaian Deteksi Error .................................49
IV. 2. 2. 3 Analisis Rangkaian Proporsional...................................50
IV. 2. 2. 4 Analisis Rangkaian Integral...........................................50
IV. 2. 2. 5 Analisis PWM................................................................51
ENUTUP simpulan .........................................................................................52
ran....................................................................................................52
DAFTAR PUSTAKA
MPIRAN
15

DAFTAR GAMBAR
Halaman
BAB I
AB II ambar 2. 1 Kurva Respon Tangga Satuan ......................................................5
2. 3 Kurva Respon Berbentuk-S ..........................................................6
Gambar 2. 4 Rangkaian Proporsional..............................................................12
. 5 Rangkaian Integral......................................................................12
Kurva Perpotongan Garis Singgung ...........................................27
5 Boiler ..........................................................................................29
BG
Gambar 2. 2 Respon Tangga Satuan Sebuah Sistem.........................................6
Gambar
Gambar 2
Gambar 2. 6 Diagram Blok Kontroller PI .......................................................14
Gambar 2. 7 Rangkaian PI...............................................................................14
Gambar 2. 8 Skema MOC30XXX...................................................................16
Gambar 2. 9 Simbol Triac ...............................................................................17
Gambar 2. 10 Rangkaian Penguat Beda ..........................................................18
Gambar 2. 11 Rangkaian Penguat Tegangan...................................................19
Gambar 2. 12 Pulsa PWM ...............................................................................20
Gambar 2. 13 Rangkaian PWM.......................................................................21
Gambar 2. 14 Cara Kerja Pembangkitan Gelombang Segitiga .......................21
BAB III Gambar 3. 1 Diagram Blok Rangkaian Secara Umum....................................24
Gambar 3. 2 Lay Out Pengendali.....................................................................25
Gambar 3. 3 Kurva Respon Plant....................................................................27
Gambar 3. 4
Gambar 3.
Gambar 3. 6 Sensor Tekanan...........................................................................31
16
Gambar 3. 7 Rangkaian Pembagi Tegangan ...................................................32
Gambar 3. 8 Rangkaian Set Point....................................................................34
Gambar 3. 9 Rangkaian Penguat Proporsional................................................36
Gambar 3. 10 Rangkaian Penguat Integral......................................................37
Gambar 3. 11 Diagram Blok Rangkaian Pengendali PI ..................................38
Gambar 3. 12 Rangkaian PI.............................................................................39
Gambar 3. 13 Rangkaian Penguat Beda ..........................................................40
Gambar 3. 14 Rangkaian PWM.......................................................................41
Gambar 3. 15 Perancangan PWM ...................................................................43
Gambar 3. 16 Interfacing Triac Dengan Pengendali PI ..................................44
BAB IV Gambar 4. 1 Boiler ..........................................................................................48
BAB V
17

DAFTAR TABEL
Halaman
Tabel 2. 1 Aturan penyepadanan Ziegler-Nichols..............................................8
abel 2. 2 Macam-macam MOC30XXX .........................................................16
Set Point ..........................................................................................32
T
Tabel 3. 1 Data Plant .......................................................................................26
Tabel 3. 2
18

BAB I
PENDAHULUAN
1.1 Latar belakang
Peralatan instrumentasi adalah in rumen elektronik yang dikendalikan oleh
sistem elektronika. Instrumen elektronik memiliki beberapa sistem pengendalian
yaitu secara manual, digital dan terkendali mikroprosesor. Dalam dunia industri
pengukuran dan pengendalian merupakan hal yang sangat penting untuk mendukung
yang memerlukan kepresisian instrumen adalah besaran tekanan. Seperti diketahui
pengoperasian sistem peralatan pada sektor jasa (pelayanan), pembangkit tenaga
pemakaian sensor tekanan yang dihubungkan dengan sistem kontrol untuk menset
tu sesuai keinginan. Kontrol tekanan
memegang peranan yang sangat penting dalam proses produksi, misalnya pada
st
proses produksi. Peralatan kendali tersebut haruslah bersifat presisi dan efisien serta
mudah pengoperasiannya. Salah satu contoh di dunia industri dan kehidupan, besaran
besaran tekanan ini banyak terlibat dalam proses produksi dalam bidang industri,
listrik dan lain-lain.
Untuk mengatur tekanan banyak cara dilakukan, sebagai contoh adalah
atau mendapatkan nilai tekanan terten
industri kimia di mana sering kali suatu proses diharapkan memiliki kestabilan
tekanan tertentu agar didapat hasil proses yang sesuai. Pada industri yang
19

menggunakan tekanan dalam prosesnya, maka pasti menggunakan boiler (panic
bertekanan). Tekanan tersebut
dilakukan oleh tenaga manusia, dan untuk mengurangi tingkat resiko
kecelakaan pada manusia.
1.2 Tujuan dan manfaat
ujuan dari pembuatan tugas akhir ini adalah untuk membuat suatu
endali PID yang mengendalikan kompor listrik 600
Watt. De
engendalian dan instrumentasi dalam
bentuk p
T
peralatan sebagai aplikasi peng
ngan kata lain pengendali PID yang dibuat bertujuan untuk mengontrol
tekanan pada boiler agar tidak berlebihan dan sesuai dengan tekanan yang diinginkan
melalui kompor 600 Watt yang dikendalikan.
Manfaatnya adalah untuk menerapkan ilmu pengetahuan yang telah
diperoleh selama kuliah terutama di bidang p
embuatan alat sebagai implementasinya terutama sebagai pengendali
tekanan uap pada system pemanas air. Dengan adanya pengendali tekanan uap air
otomatis pada system pemanas ini diharapkan dapat mempermudah pekerjaan yang
sulit dilakukan oleh tenaga manusia, dan untuk mengurangi tingkat resiko kecelakaan
pada manusia.
20
1.3 Batasan masalah.
Pada pembuatan tugas akhir ini penyusun membuat alat yang dapat
r dan kontrol terhadap level tekanan uap air. Instrumen
yang dim
dengan rentang tekanan 0
2.
3. n adalah kompor listrik 600 Watt.
rapkan seperti pada set
setting tekanan yang diinginkan melalui sebuah set kontrol berupa
potensiom
digunakan untu menguku
aksud memiliki spesifikasi sebagai berikut :
1. Pengendali dirancang berdasarkan sensor yang digunakan yaitu Pressure
Transmitter yang bertipe 8320 dari Burkert
sampai dengan 10 Bar.
Pengendali sistem pemanas air berdasar set point.
Aktuator yang digunaka
4. Apabila telah mencapai tekanan uap air yang diha
point, maka pemanas akan mati.
5. Tekanan yang dapat terukur pada boiler mempunyai rentang 0 sampai 1,5
Bar.
Pemakaian instrumen ini adalah kontrol tekanan dengan menetapkan
eter. Pengesetan yang dilakukan adalah menentukan batas
maksimum tekanan uap air. Setelah tekanan diset sesuai dengan keinginan
diharapkan alat yang dapat menjaga stablitas tekanan sesuai dengan set yang
diberikan.
21

1.4 Metodologi penelitian.
Penyusunan laporan tugas akhir ini mempunyai metode penelitian yang
1. Me n
elah direncanakan.
g berupa panci bertekanan atau
3.
nsor tekanan, batas tekanan boiler dan waktu yang
4.
ui karakteristik dari sensor tekanan, batas tekanan boiler
6.
tepat dan akurat.
h sudah sesuai dengan yang kita
dapat dijelaskan berikut ini :
ncari referensi yang dibutuhkan untuk mendukung proses perancanga
dan pembuatan alat yang t
2. Membuat plant. Dalam hal ini penulis akan membuat pengendali tekanan uap
air, sehingga kami harus membuat plant yan
biasa disebut boiler.
Setelah plant kami buat, pengambilan data dilakukan untuk mengetahui
karakteristik dari se
dibutuhkan untuk mencapai tekanan maksimum.
Dengan adanya data dari plant yang sudah dibuat, maka kita dapat melakukan
penulisan proposal.
5. Perancangan kontrol pengendali bisa dilaksanakan karena plant dibuat dan
kita sudah mengetah
dan waktu yang dibutuhkan untuk mencapai tekanan maksimum serta data-
data lain yang diperlukan.
Implementasi kontrol pengendali dapat segera dilakukan dengan adanya
rancangan pengendali yang
7. Hal terakhir yaitu pengujian. Kita lakukan pengujian secara menyeluruh
antara hubungan pengendali dan plant, apaka
22

harapkan atau belum. Selain itu kita juga mengambil data dari pengendali
dan plant yang kita buat.
Penulisan laporan dilakukan untuk koreksi apakah alat kita sudah sesuai
dengan kriteria alat yang
8.
baik, apakah sudah sesuai dengan harapan kita
1.5 Si
Sistem pembahasan tidak jauh berbeda dengan metodologi yang digunakan
n menurut metodologinya seperti berikut :
ada bab ini berisikan mengenai penjelasan latar belakang masalah, maksud
yang menjelaska tentang rancangan system yang akan
ilihan komponen yang nantinya
asi alat yang akan dikerjakan.
emperoleh nilai – nilai
ya an pertimbangan dari pemilihan komponen
tersebut.
(sesuai dengan perancangannya), selain untuk mencocokkan data antara teori
dan data pada alat secara nyata.
stematika penulisan
dan penulis membagi pembahasa
BAB I. Pendahuluan
P
dan tujuan, batasan masalah,
dibuat, serta menjelaskan sistematika pembahasan
BAB II. Dasar Teori
Pada bab ini berisi tentang teori dan pem
digunakan dalam implement
BAB III. Rancangan Penelitian
Pada bab ini berisikan mengenai bagaimana m
komponen ng akan digunakan d
23

BAB IV. Hasil Pengamatan dan Pembahasan
Berisi mengenai bagaimana hasil dari kerja alat yang dibuat dan menganalisis
data yang diperoleh.
saran agar baik kedepannya.
BAB V. Kesimpulan dan Saran
Pada bab ini berisikan kesimpulan dari hasil perancangan dan
implementasinya serta
24
BAB II
DASAR TEORI
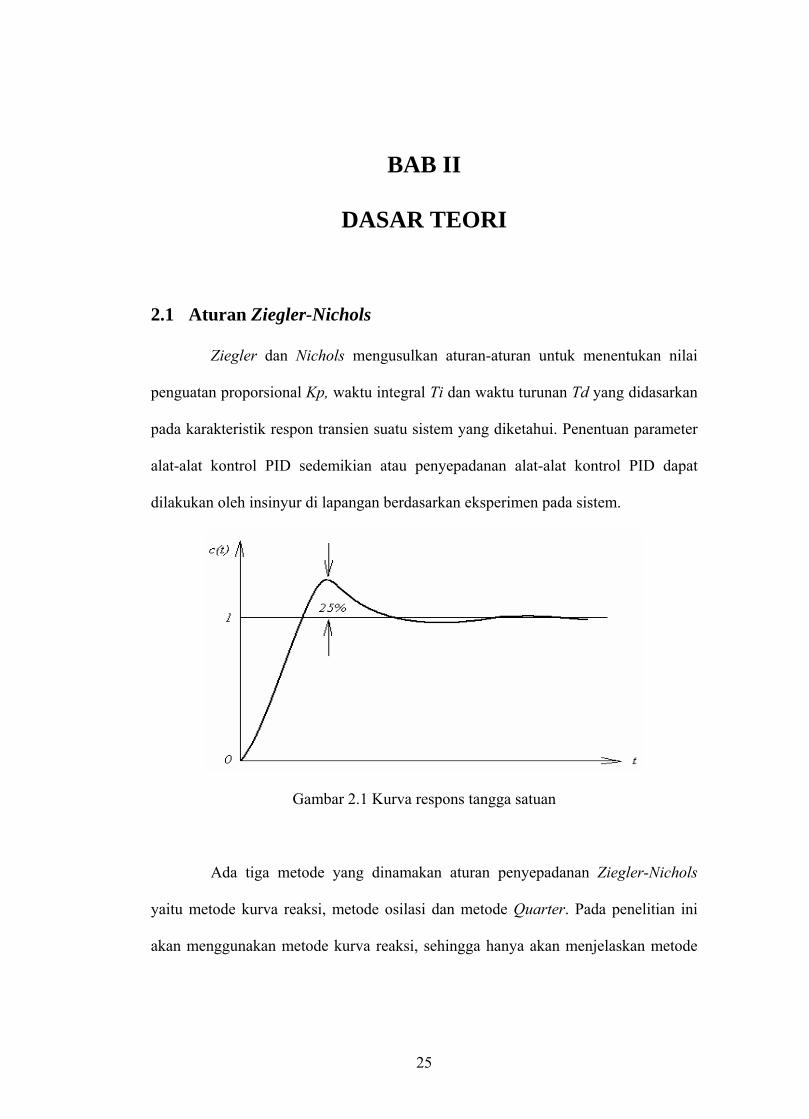
2.1 Aturan Ziegler-Nic
Ziegler dan Nichols mengusulkan aturan-aturan untuk menentukan nilai
penguatan proporsional Kp, waktu integra dan waktu turunan Td yang didasarkan
uatu sistem yang diketahui. Penentuan parameter
alat-alat
hols
l Ti
pada karakteristik respon transien s
kontrol PID sedemikian atau penyepadanan alat-alat kontrol PID dapat
dilakukan oleh insinyur di lapangan berdasarkan eksperimen pada sistem.
Gambar 2.1 Kurva respons tangga satuan
Ada tiga metode yang dinamakan aturan penyepadanan Ziegler ols
yaitu metode kurva r . Pada penelitian ini
akan menggunakan metode kurva reaksi, sehingga hanya akan menjelaskan metode
-Nich
eaksi, metode osilasi dan metode Quarter
25

kurva rea
nan, maka kurva
respons s
ksi saja. Dalam ketiga metode ini, mereka ditujukan pada pencapaian 25%
lonjakan maksimum dalam respon tangga seperti pada gambar 2.1.
Dalam metode kurva reaksi, secara eksperimental respons sistem terhadap
masukan tangga-satuan diperlihatkan pada gambar 2.2. Jika sistem tidak mencakup
integrator ataupun nilai-nilai kutub pasangan kompleks yang domi
ebuah tangga satuan mungkin kelihatan seperti kurva berbentuk-S, seperti
diperlihatkan pada gambar 2.3.
Gambar 2.2 Respons tangga satuan sebuah sistem
Gambar 2.3 Kurva respons berbentuk-S
Karakteristik kurva berbentuk-S dapat diberikan oleh dua konstanta, yakni
waktu tunda L dan ko tu ditentukan dengan
menggambarkan garis singgung pada titik perubahan kurva berbentuk-S dan
menentukan perpotongan garis singgung dengan sumbu waktu dan garis c(t)=K,
nstanta waktu tunda T dan konstanta wak
26
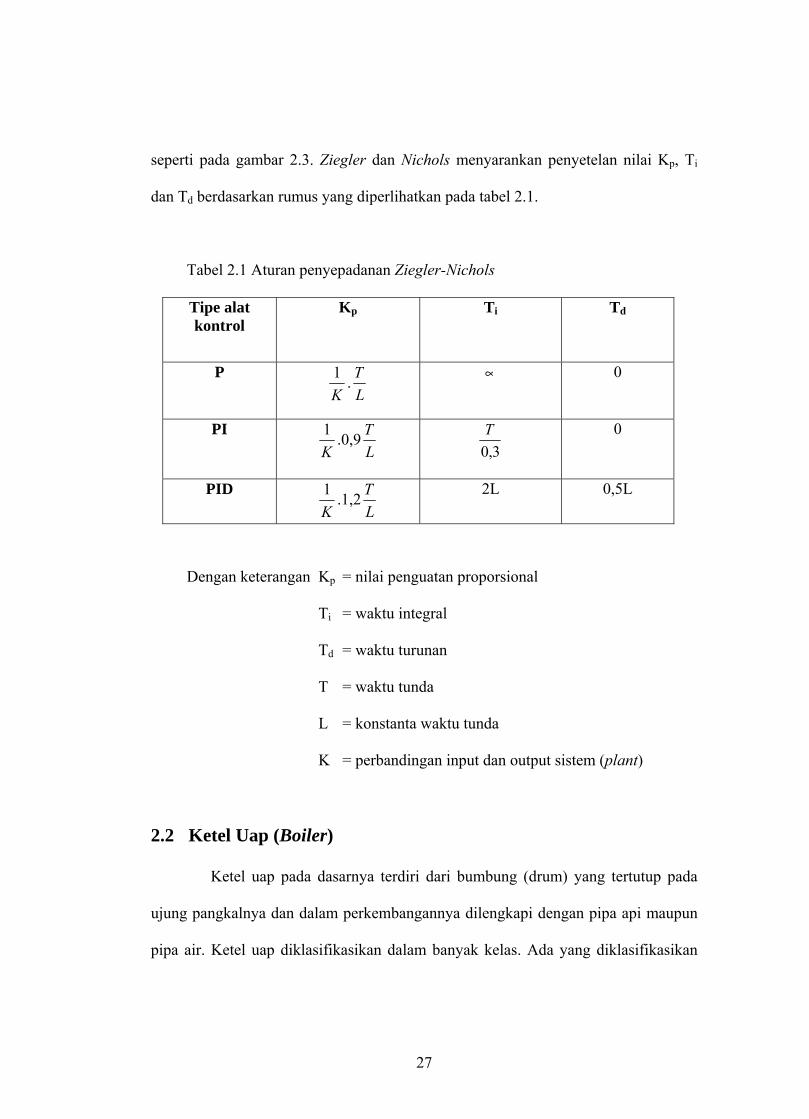
seperti p
kontrol
ada gambar 2.3. Ziegler dan Nichols menyarankan penyetelan nilai Kp, Ti
dan Td berdasarkan rumus yang diperlihatkan pada tabel 2.1.
Tabel 2.1 Aturan penyepadanan Ziegler-Nichols
Tipe alat Kp Ti Td
P 0 K1 .
LT ∞
PI 0 .0,9
LT
3,0T
K1
PID 2L 0,5L .1,2
LT
K1
Dengan keterangan Kp ila penguatan propors nal
Ti = waktu integral
Td a u turunan
T = waktu tunda
put dan output sistem (plant)
2.2 Ketel Uap
Ketel a ada g (drum) yang tertutup pada
ujung pangkalnya dan dalam aupun
pipa air. Ketel uap diklasifikasikan dalam banyak kelas. Ada yang diklasifikasikan
= n i io
= w kt
L = konstanta waktu tunda
K = perbandingan in
(Boiler)
u p p dasarnya terdiri dari bumbun
perkembangannya dilengkapi dengan pipa api m
27

berdasarkan fluida yang mengalir dalam pipa, pemakaian, letak dapur, jumlah
lorong,
ai alat untuk mengubah energi kimia menjadi energi
i potensial uap.
ketel uap untuk berfungsi.
Sed
si secara efektif.
. Sistem pemipaan, memungkinkan sistem penghantaran kalor yang
as panas dengan air ketel.
proses tutup drum, bentuk dan letak pipa, sistem peredaran air dan
berdasarkan sumber panasnya.
Ketel uap berfungsi sebagai pesawat konversi energi yang
mengkombinasikan energi kimia (potensial) dari bahan bakar menjadi energi panas.
Komponen utama pada boiler :
1. Dapur, sebag
panas.
2. Alat penguap (evaporator) yang mengubah energi pembakaran
menjadi energ
Kedua komponen tersebut di atas telah dapat memungkinkan sebuah
angkan komponen lainnya :
1. Corong asap dengan sistem tarikan gas asapnya, memungkinkan
dapur berfung
2
efektif antara nyala api atau g
3. Sistem pemanas uap lanjut, berfungsi sebagai alat untuk
menaikkan efisiensi ketel.
28

2.3 Sensor
Sensor ntransform (mengubah) suatu nilai
(isyarat/energi) fisik ke nilai fisik yang lain. Sensor menghubungkan antara fisik
nyata dan industri electrik dan piranti elektronika. Di dunia industri sensor berguna
ng, kontrolling, dan proteksi. Sensor sering disebut juga dengan
Transduc
esaran fisik saja, tetapi juga pada kimia, dan biologi. Ada 6 tipe isyarat
:
• Electrical, contoh: tegangan, arus, muatan, resistance, frekuensi,
•
i, dll
Sensor m uput. Sensor
bisa saja men u atu
adalah piranti yang me
untuk monitori
er.
Transducer merupakan piranti yang memberikan output (yang bisa dipakai)
sebagai tanggapan terhadap (measurand) kondisi, kuantitas fisik masukan. Output
dari sensor berupa (didefinisikan sebagai) besaran elektris. Sensor tidak terbatas pada
pengukuran b
• Mechanical, contoh: panjang, luas, mass flow, gaya, torque,
tekanan, kecepatan, percepatan, panjang gel acoustic, dll
• Thermal, contoh: temperature, panas, entropy, heat flow
dll
Magnetic, contoh: intensitas medan, flux density, dll
• Radiant, contoh: intensitas, panjang gelombang, polarisas
• Chemical, contoh: komposisi, konsentrasi, pH, kecepatan reaksi,
dll.
engkonversi dari suatu isyarat input ke suatu isyarat o
gg nakan satu atau lebih pengkonversian untuk menghasilkan su
29

isyarat keluara A
bantuan sumber energi yang menunjangnya atau tidak yaitu :
couple tersebut.
2.4 Pen d
D
Proporsion ral.
kaian Proporsional
wujud
mekanism yang ada dan apapun bentuk daya penggeraknya, kendali
p enguat dengan penguatan yang dapat
diatur. G
n. da 2 macam sensor yang digolongkan berdasarkan ada tidaknya
Passive Sensor. Mengkonversi sifat-sifat/isyarat fisik atau kimia ke
dalam isyarat yang lain tanpa bantuan sumber energi. Contoh :
termocouple. Termocouple menghasilkan tegangan output
sebanding dengan suhu pada sambungan term
Active Sensor. Mengkonversi sifat-sifat/isyarat fisik atau kimia ke
dalam isyarat yang lain dengan bantuan sumber energi. Merupakan
pilihan utama untuk isyarat-isyarat yang lemah/kecil.
gen ali
alam hal ini pengendali yang dimaksud meliputi rangkaian
al, rangkaian Integral dan rangkaian Proporsional Integ
2.4.1 Rang
Pengendali proporsional adalah pengendali yang keluarannya
proporsional dengan masukannya yang berupa error. Apapun
e
roporsional pada dasarnya merupakan p
ambar 2.4 merupakan rangkaian kendali proporsional. Sehingga dari
gambar rangkaian tersebut didapatkan persamaan :
Vout = Kp Ve (2.1)
30

dengan Vout = tegangan output
Kp = -1
2
RR
(Gain)
Ve = tegangan error
Gambar 2.4 Rangkaian Proporsional
Misalkan sinyal masukan e (t) dan sinyal keluaran adalah m (t) maka :
m (t) = Kp. e (t) (2.2)
Kp merupakan konstanta pengendali proporsional atau penguatan.
2.4.2 Rangkaian Integral
Rangkaian kendali integral ditunjukkan pada gambar 2.5 di bawah ini.
31
Gambar 2.5 Rangkaian Integral
Dari gambar 2.5 diperoleh persamaan :
Vout = KI (2.3)
dengan Vout = tegangan output
KI =
∫ +t
VoutVedt0
)0(
-11.
1CR
(Integration gain)
Ti = RI. CI (waktu integral)
ror voltage
Vout (0) = initial output voltage
integral, nilai keluaran kendali m (t)
d bah d ng sinyal kesalahan penggerak e (t)
sehingga :
(2.4)
2.4.3
berikut :
p e(t) +
Ve = er
Pada kendali dengan aksi kendali
iu engan laju ya sebanding dengan
m (t) = Ki ∫ )(te dt
Rangkaian PI (Proporsional Integral)
Aksi kontrol proporsional plus integral didefinisikan dengan
persamaan
∫t
p dtteK
)( (2.5) m (t) = KIT 0
atau fungsi alih kontroler adalah :
32

⎟⎟⎠
⎞⎜⎛sEsM 1)()( (2.6) ⎜⎝
+=sT
KI
p 1
Diagram blok kontroler proporsional integral dapat dilihat pada
gambar 2.6 di bawah ini.
Gambar 2.6 Diagram blok kontroler PI.
Rumusan yang didapatkan dari blok diagram tersebut adalah :
m (t) = Kp e(t) + ∫t
dtteTiKp
0
)( (2.7)
Gambar 2.7 Rangkaian PI
33
Kp menyatakan kepekaan proporsional atau penguatan, dan Ti
menyatakan waktu integral. Gambar rangkaian PI secara nyata dapat dilihat
pada gambar 2.7.
Rumusan untuk rangkaian pada gambar 2.7 adalah :
Vout = - ( ∫+ VedtCIRIR
RVeRR
.1
12
12 ) (2.8)
Dengan Kp = 12
RR dan KI =
II CR
Triac Driver
1
2.5
LED AlGaAs memiliki nominal 1.3 V forward drop 10mA dan tegangan
Kelua s terdiri dari sebuah LED
infram minium gallium aesenida, dig
Dua chip ini dirakit pada enam paket pin DIP, menyediakan 7.5KVAC(peak) penyekat
antara LED dan keluaran. tor keluaran ini dirancang memicu
triac guna mengendalikan beban pada tegangan 115 Volt dan 220 Volt. Chip
h alat yang berfungsi sama dengan sebuah triac kecil, sinyal
yang dih
b
adalah berdasarkan blocking tegangan (VDM) dan arus pemicu (IFT). Arus maksimal
rga MOC30XX dari non-zero crossing triac driver
erah alu abungkan pada chip detector silikon.
detector Chip detec
detector adalah sebua
asilkan digunakan untuk memicu triac yang besar. MOC30XX memiliki
kemampuan untuk mengontrol triac daya besar dengan meminimumkan komponen
tambahan.
Macam-macam MOC30XX dapat dilihat pada tabel 2.2. Pem edaannya
34
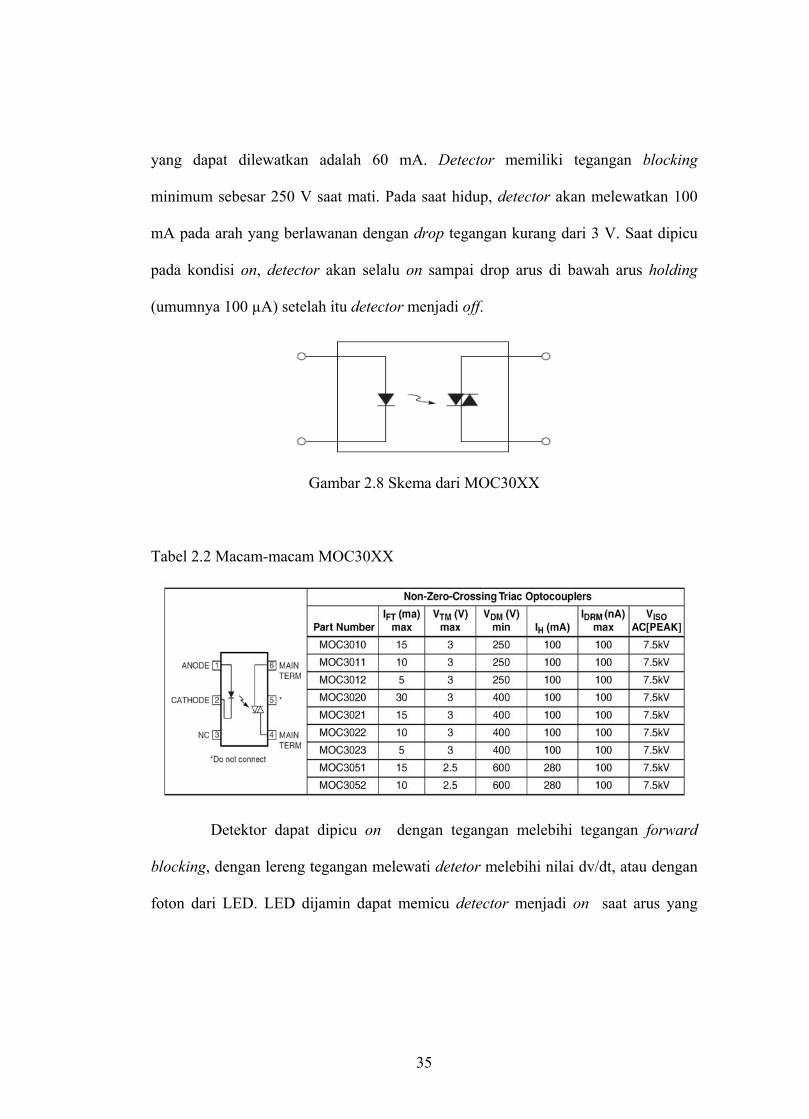
yang dapat dilewatkan adalah 60 mA. Detector memiliki tegangan blocking
minimum sebesar 250 V saat mati. Pada saat hidup, detector akan melewatkan 100
mA pada arah yang berlawanan dengan drop tegangan kurang dari 3 V. Saat dipicu
pada kondisi on, detector akan selalu on sampai drop arus di bawah arus holding
(umumnya 100 µA) setelah itu detector menjadi off.
Gambar 2.8 Skema dari MOC30XX
Tabel 2.2 Macam-macam MOC30XX
Detektor dapat dipicu on dengan tegangan melebihi tegangan forward
blocking, dengan lereng tegangan melewati detetor melebihi nilai dv/dt, atau dengan
foton dari LED. LED dijamin dapat memicu detector menjadi on saat arus yang
35

melewati LED sama, atau lebih dari IFT(MAX). Bentuk MOC3021 dapat dilihat pada
gambar 2.8.
2.6 Triac
Triac adalah Thyristor dua arah yaitu suatu piranti tiga terminal yang dapat
melewatkan arus dalam kedua arah melalui jalur utamanya. Terminal-terminal arus
utama dikenal sebagai terminal utama-1 (T1) dan terminal utama-2 (T2), seperti
yang ditunjukkan dalam gambar 2.9 (a).
Gambar 2.9 (a) Simbol Triac, (b) Rangkaian Equivalen Triac
Triac tersusun dari dua buah SCR yang dipasang paralel berkebalikan,
seperti pada gambar 2.9 (b).
SCR (Silicon Controlled Rectifier) adalah suatu piranti semikonduktor yang
hanya dapat melewati arus dalam satu arah, maka akan sangat berguna untuk
mengendalikan arus DC. Jika dua SCR digabung secara paralel berkebalikan maka
didapatkan suatu pengendali fasa AC dan disebut sebagai triac. Kedua terminal dapat
berlaku sebagai katoda dan anoda.
36
Jik gah aliran
arus dala
ik oleh sinyal gerbang positif maupun negatif. Jika
terminal
2.7 Pe
a tegangan yang dipasangkan pada gerbang nol, triac mence
m kedua arah dan pada kondisi ini triac berada dalam keadaan blocking.
Triac dapat dihidupkan ba
T2 adalah positif terhadap T1 triac dipicu menjadi menghantarkan oleh
suatu pulsa positif yang dipasang pada gerbang. Jika T2 negatif terhadap T1, maka
triac akan dapat dihidupkan dengan memberikan suatu pulsa negatif yang dipasang
pada gerbang.
nguat Instrumentasi
2.7.1 Rangkaian penguat beda
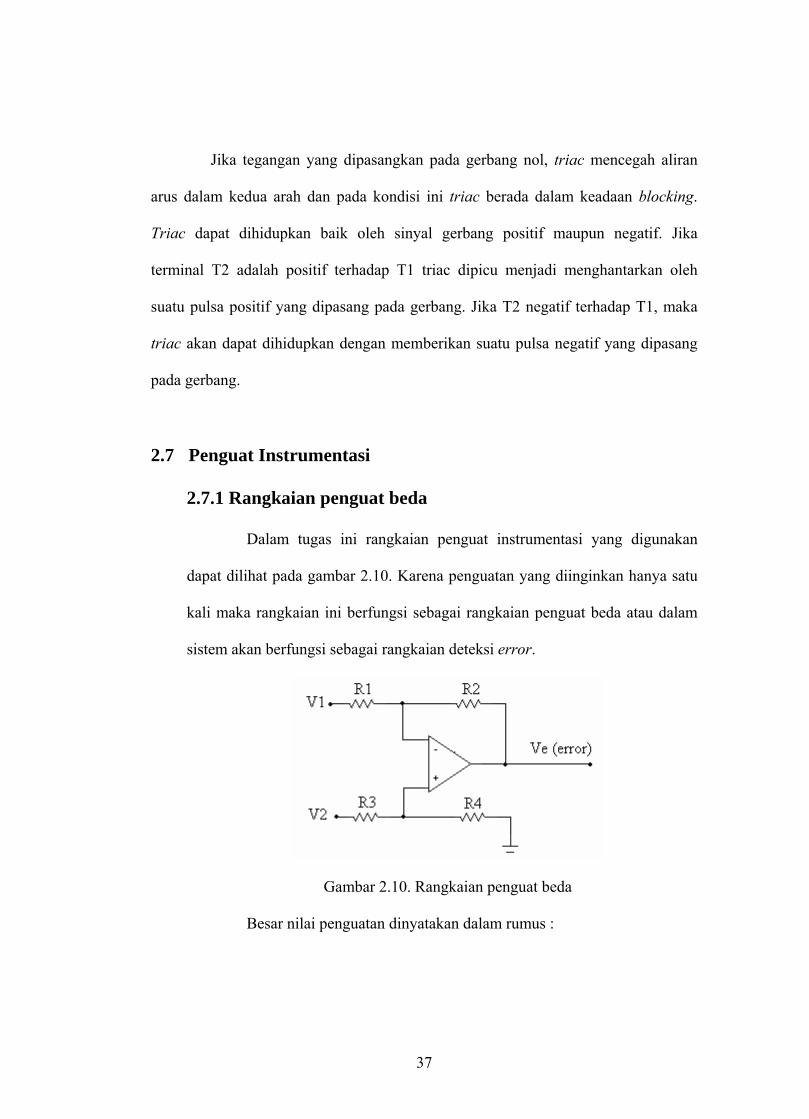
Dalam tugas ini rangkaian penguat instrumentasi yang digunakan
dapat dilihat pada gambar 2.10. Karena penguatan yang diinginkan hanya satu
kali maka rangkaian ini berfungsi sebagai rangkaian penguat beda atau dalam
sistem akan berfungsi sebagai rangkaian deteksi error.
Gambar 2.10. Rangkaian penguat beda
Besar nilai penguatan dinyatakan dalam rumus :
37
( )12 VVVe−
M = (2.9)
Dengan Ve = tegangan error (masukan untuk pengendali PI)
V1 = tegangan masukan dari sensor tekanan
V2 = tegangan masukan dari set point
R1 = R3
R2
maan :
V2-V1).
= R4
Dari rangkaian pada gambar 2.10 diperoleh persa
Ve = (1
2R (2.10)
R
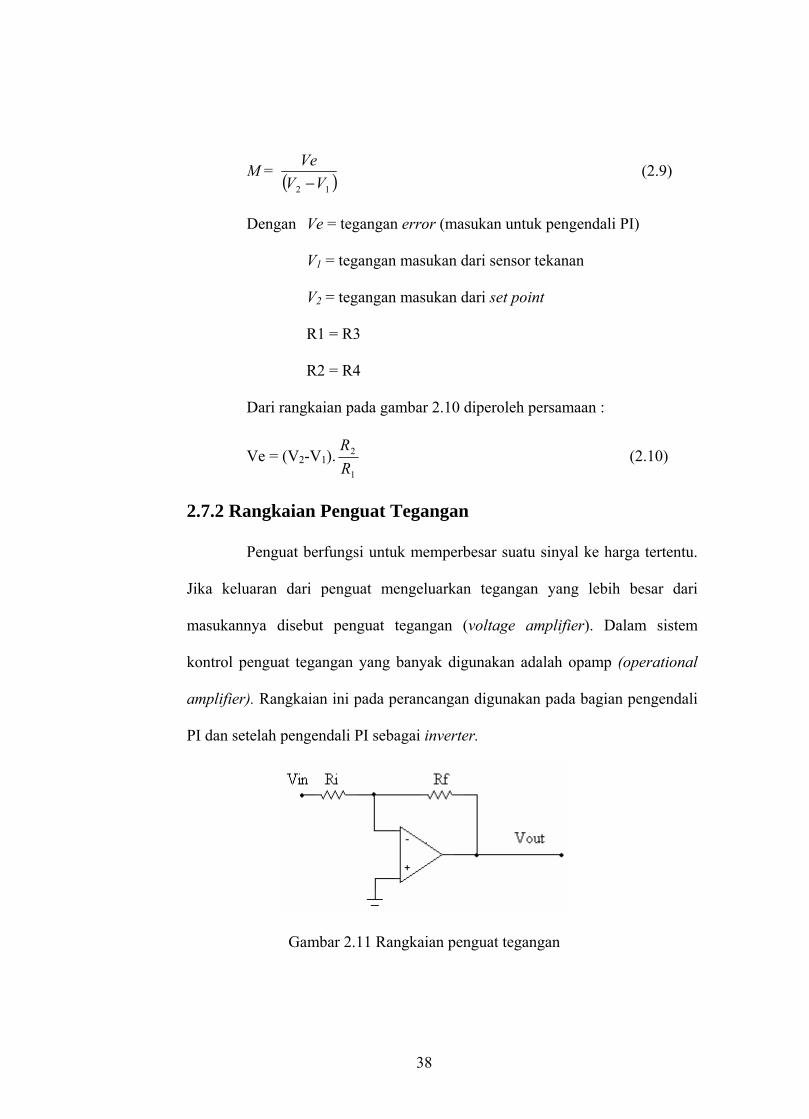
2.7.2 Rangk
Penguat berfungsi untuk memperbesar suatu sinyal ke harga tertentu.
Jika keluaran dari penguat mengeluarkan tegangan yang lebih besar dari
masukannya disebut penguat tegangan (voltage amplifier). Dalam sistem
kontrol penguat tegangan yang banyak digunakan adalah opamp (operational
amplifier). Rangkaian ini pada perancangan digunakan pada bagian pengendali
PI dan se li P
aian Penguat Tegangan
telah pengenda I sebagai inverter.
Gambar 2.11 Rangkaian penguat tegangan
38

Dengan Vi = tegangan input
Vout = tegangan output
Rumusan nilai penguatan dari gambar 2.11 adalah :
A = RiRf (2.11)
RiRf
VinVout = (2.12)
Jika Ri Rf , rangkaian ini disebut penguat pembalik (inverting
amplifier atau inverter).
2.8 Modulasi lebar pulsa (Pulse Width Modulation, PWM)
PWM merupakan rangkaian yang menghasilkan variasi pulsa untuk
masukan dc yang bervari
berubah-ubah tergantung masukan dc-nya. Pada prinsipnya PWM ini
membandingkan tegangan segitiga yang berperiode konstan tertentu dengantegangan
dc yang berubah-ubah. Hasilnya berupa gelombang kotak dengan perbandingan
periode on-off yang berubah. Untuk lebih jelasnya perhatikan gambar 2.12.
Misalkan suatu gelombang segitiga dibandingkan dengantegangan sebesar
Vdc1 yang berpolaritas positif dihasilkan gelombang kotak dengan duty cycle di atas
50% dan jika dibandingkan dengan tegangan Vdc2 yang berpolaritas negative
menghasilkan duty cycle di bawah 50%.
≈
asi. Dengan PWM akan didapatkan nilai duty cycle yang
39
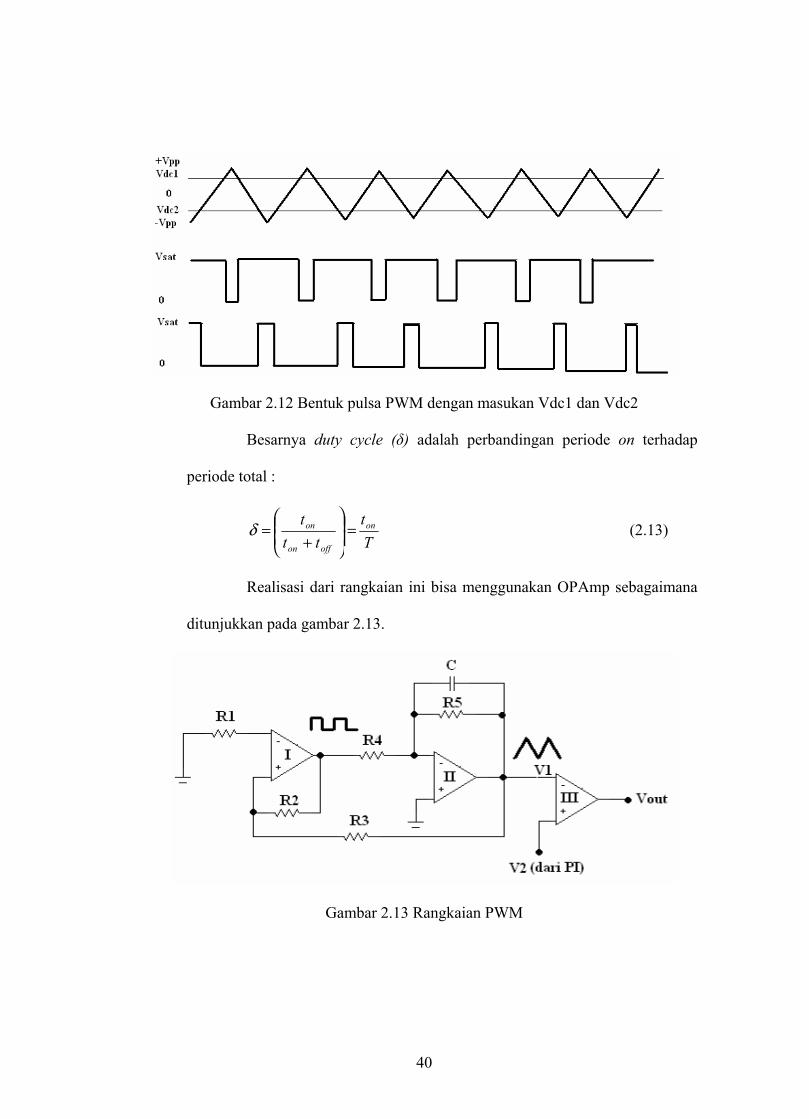
Gambar 2.12 Bentuk pulsa PWM dengan masukan Vdc1 dan Vdc2
Besarnya duty cycle (δ) adalah perbandingan periode on terhadap
periode total :
Tt
ttt on
offon
on =⎟⎟⎠
⎞⎜⎜⎝
⎛+
=δ (2.13)
Realisasi dari rangkaian ini bisa menggunakan OPAmp sebagaimana
ditunjukkan pada gambar 2.13.
Gambar 2.13 Rangkaian PWM
40
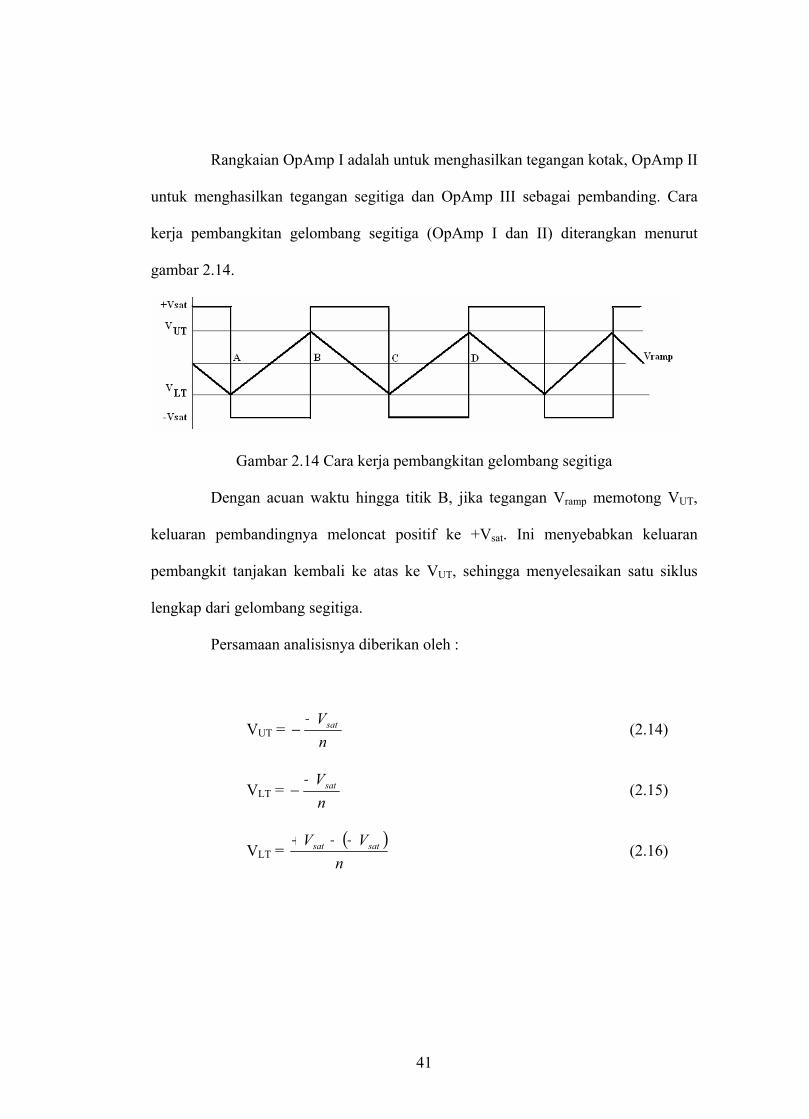
Rangkaian OpAmp I adalah untuk menghasilkan tegangan kotak, OpAmp II
untuk menghasilkan tegangan segitiga dan OpAmp III sebagai pembanding. Cara
kerja pembangkitan gelombang segitiga (OpAmp I dan II) diterangkan menurut
gambar 2.14.
Gambar 2.14 Cara kerja pembangkitan gelombang segitiga
Dengan acuan waktu hingga titik B, jika tegangan V memotong V ,
keluaran pembandingnya meloncat positif ke +V . Ini menyebabkan keluaran
pembangkit tanjakan kem
ramp UT
sat
bali ke atas ke VUT, sehingga menyelesaikan satu siklus
lengkap dari gelombang segitiga.
Persamaan analisisnya diberikan oleh :
VUT = Vsat+n
− (2.14)
VLT = nVsat−
− (2.15)
VLT = ( )
nsatsat VV − −+
(2.16)
41

Untuk pembangkit segitiga tersebut didapatkan perumusan sebagai
berikut :
Tegangan puncak ke puncak (Vpp) :
Vpp = 2
3.R
R (2.17)
.2 Vsat
F =
Frekuensi yang dihasilkan sebesar :
CRRR
.4.3.42 (2.18)
Sedangkan R1 sebesar parallel R2 dan R3 yang berfungsi untuk
mengkompe asukan, sehingga tegangan masukan inverting dan non
inverting besarnya sam asukan
tersebut nol.
Pad an yaitu masukan V1 berupa
gelombang segitiga yang tetap dan masukan V2 berupa tegangan dc yang bisa
diubah-ubah. Dengan mengubah-uabah besarnya tegangan dc maka keluarannya
mempun
nsasi besarnya m
a yang mengakibatkan beda potensial antara kedua m
a bagian pembanding ada dua masuk
yai amplitude sebesar tegangan saturasi OpAmp dan periode on-off yang
berubah-ubah sebagaimana dideskripsikan pada gambar 2.12.
42

BAB III
PERANCANGAN
3. 1 Pengendali secara umum
Alat yang akan dibuat merupakan pengendali tekanan uap pada sistem
pem nas air berbasis PI (Proporsional Integral). Blok diagram dari alat dapat dilihat
ada gambar di bawah ini :
a
p
Gambar 3.1 Diagram blok rangkaian secara umum
Cara kerja alat secara garis besar adalah set point diubah (sesuai tekanan
yang diinginkan) setelah itu maka alat akan bekerja secara otomatis. Yang dimaksud
dengan bekerja secara otomatis adalah, alat akan mati bila tekanan pada boiler sesuai
dengan tekanan yang diatur pada set point.
Rangkaian penguat beda digunakan untuk mendapatkan nilai error yang
merupakan selisih antara tegangan masukan dari set point dan tegangan yang
43
dihasilkan oleh s unakan sebagai
input pengendali PI yang nantinya tegangan keluaran dari pengendali PI akan
digunak
ensor tekanan. Tegangan error yang didapatkan dig
an sebagai input untuk rangkaian driver. Driver digunakan sebagai pemutus
dan penyambung tegangan pada aktuator, dalam hal ini digunakan rangkaian triac
sebagai driver. Lay out dari pengendali yang akan dibuat dapat dilihat pada gambar
3.2.
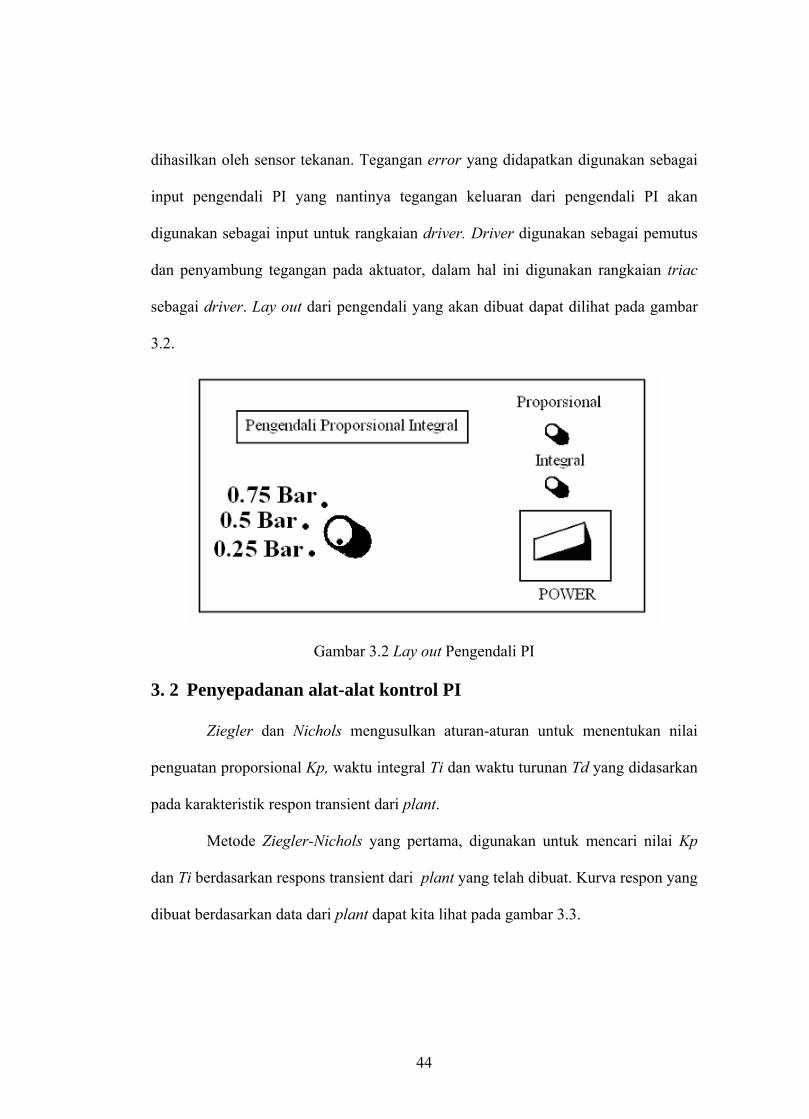
Gambar 3.2 Lay out Pengendali PI
3. 2 Penyepadanan alat-alat kontrol PI
Ziegler dan Nichols mengusulkan aturan-aturan untuk menentukan nilai
penguatan proporsional Kp, waktu integral Ti dan waktu turunan Td yang didasarkan
pada karakteristik respon transient dari plant.
Metode Ziegler-Nichols yang pertama, digunakan untuk mencari nilai Kp
dan Ti berdasarkan respons transient dari plant yang telah dibuat. Kurva respon yang
dibuat berdasarkan data dari plant dapat kita lihat pada gambar 3.3.
44

Data yang diperoleh dari plant adalah sebagai berikut :
n (Volt) Waktu (Menit)
Tabel 3.1 Data plant
No Tekanan (Bar) Teganga1 0 0.404 0 2 0.05 0.418 19 3 0.1 0.421 22 4 0.15 0.430 28 5 0.2 0.438 33 6 0.25 0.445 37 7 0.3 0.452 42 8 0.35 0.461 46 9 0.4 0.468 50 10 3 0.45 0.476 511 0.5 0.486 58 12 0.55 0.493 60 13 0.6 0.500 64 14 0.65 0.508 67 15 0.7 0.515 70 16 0.75 0.524 73 17 0 .8 0.531 76 18 0.85 0.539 78 19 0.9 0.546 81 20 0.95 0.556 85 21 1 0.563 87 22 1.05 0.570 90 23 1.1 0.578 93 24 1.15 0.587 95 25 1.2 0.594 98 26 1.25 0.601 101 27 1.3 0.610 104 28 1.35 0.618 107 29 1.4 0.625 110 30 1.45 0.633 113 31 1.5 0.641 117
45

Gambar 3.3 Kurva respons Plant
Karakteristik kurva respons plant dapat diberikan oleh dua konstanta, yakni
waktu tunda L dan konstanta waktu tunda T dan konstanta waktu ditentukan dengan
menggambarkan garis singgung pada titik perubahan kurva plant dan menentukan
perpotongan garis singgung dengan sumbu waktu dan garis c(t)=K, seperti pada
gambar 3.4.
Gambar 3.4 Kurva perpotongan garis singgung
46

Dari perhitungan yang didasarkan terhadap kurva respons plant yang dibuat,
maka didapatkan nilai L = 30 dan T = 95. Rumusan yang diberikan oleh aturan ini
untuk pengendali PI adalah :
Kp = 0,9 LT (3.1)
Ti = 3,0
L (3.2)
Rumusan ini dapat dilihat pada tabel 2.1.
Dengan nilai L = 30 dan T = 95 dapat kita hitung :
Kp = 0,9 95 30
Kp = 2,85
Ti = 3,0
30
Ti = 100
Sehingga didapatkan nilai penguatan proporsional (Kp) dan waktu
integral (Ti) sebesar :
3. 3 Plant
Plant yang dibuat untuk tugas akhir ini merupakan panci bertekanan atau
biasa disebut dengan istilah Boiler. Gambar 3. 5 merupakan gambar dari boiler yang
Kp = 2,85
Ti = 100
47

akan kami gu ya
600W
nakan. Pemanas yang digunakan adalah kompor listrik dengan da
.
Gambar 3.5 Boiler
Dengan adanya pemanas berupa kompor listrik, tekanan boiler dapat
dikontrol melalui rangkaian pengendali yang akan digunakan dengan cara mematikan
kompor listrik secara otomatis pada tekanan tertentu dengan rangkaian pengendali.
Keterangan dari gambar 3.5 adalah :
1. Pipa yang digunakan untuk memasukkan air.
2. Pipa yang digunakan untuk mengeluarkan air.
3. Safety Valve. Digunakan sebagai pengaman saat boiler dalam keadaan
bertekanan. Saat k an air yang ada di dalam boiler,
pertama-tama kita harus membuka safety valve secara perlahan agar
ita akan mengeluark
48

tekanan berkurang sedikit demi sedikit. Dalam hal ini digunakan kran
air yang kedap sehingga tekanan di dalam boiler dapat terjaga.
4. Rongga di tengah-tengah boiler. Dibuatnya rongga ini bertujuan untuk
da boiler, apabila jumlah rongga semakin
n cepat.
manometer (indikator
6.
7.
ran yang tahan
8.
ik
n bekerja untuk manometer dan
mempercepat pemanasan pa
banyak maka dijamin pemanasan akan semaki
5. Pipa yang digunakan sebagai tempat untuk
tekanan). Dalam hal ini indikator tekanan yang digunakan mempunyai
skala nol sampai dengan tiga Bar. Diharapkan dengan dipilihnya
indikator dengan skala rendah akan didapat data yang lebih akurat.
Pipa sebagai tempat sensor tekanan.
Indikator ketinggian air. Indikator ini wajib ada di setiap boiler karena
berfungsi agar banyak air yang tersisa dalam proses pemanasan dapat
selalu dipantau, sehingga tekanan yang berlebihan karena kekurangan
air dapat dihindari. Indikator ini berupa selang transpa
panas dan tahan terhadap tekanan yang cukup tinggi.
Pipa Syphon. Pipa ini dipasang agar tekanan pada manometer dan
tekanan yang bekerja pada sensor lebih presisi. Pada pipa ini diisi
dengan air sehingga saat tekanan dari bawah naik maka air akan na
dan menimbulkan tekanan yang aka
sensor tekanan.
49

Boiler
tidak meledak strik yang akan
digunakan
3. 4 Sensor
Senso
bertipe 8320 d an rentang tekanan 0 sampai dengan 10 Bar. Sensor
ini khusus digunakan sebagai sensor tekanan uap air.
pernah diuji dengan tekanan tinggi kurang lebih 10 Bar dan ternyata
. Tetapi saat dicoba dipanaskan dengan kompor li
boiler hanya mampu mencapai tekanan kurang lebih 1,5 Bar.
tekanan
r yang digunakan pada alat ini adalah Pressure Transmitter yang
ari Burkert deng
Gambar 3. 6 Burkert Pressure Transmitter 8320
Tegangan masukan yang dibutuhkan oleh piranti ini berkisar antara 10
sampai dengan 30 VDC. Sensor ini mempunyai output 4 sampai dengan 20 mA dan
sangat mudah digunakan karena hanya mempunyai 2 kabel penghubung. Kelebihan
lain dari sensor ini adalah dari segi ketahanannya terhadap suhu. Sensor ini tahan
terhadap suhu -40 sampai +100οC. Konstruksi sensor dapat dilihat pada gambar 3.6.
50
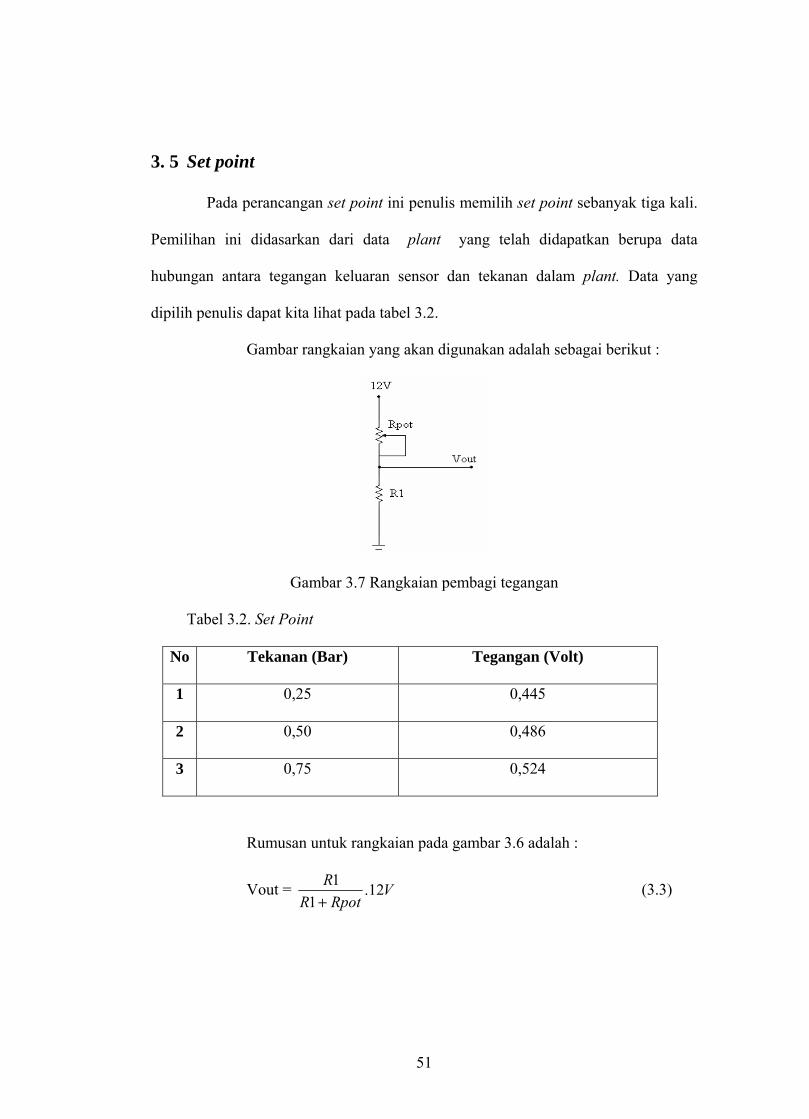
3. 5 Set point
Pada perancangan set point ini penulis memilih set point sebanyak tiga kali.
Pemilihan ini didasarkan dari data plant yang telah didapatkan berupa data
hubungan antara tegangan keluaran sensor dan tekanan dalam plant. Data yang
dipilih penulis dapat kita lihat pada tabel 3.2.
Gambar rangkaian yang akan digunakan adalah sebagai berikut :
Gambar 3.7 Rangkaian pembagi tegangan
Tabel 3.2. Set Point
No Tekanan (Bar) Tegangan (Volt)
1 0,25 0,445
2 0,50 0,486
3 0,75 0,524
Rumusan untuk rangkaian pada gambar 3.6 adalah :
Vout = VRpotR
R 12.1
1+
(3.3)
51

Sehingga perhitungan untuk komponen yang akan digunakan dapat
dilakukan.
Set point satu
Vout = VRpotR
R 12.1
1+
; dengan R1 = 1 KΩ
0,445 V = KRpotK +Ω
Ω1
.12V 1
VV
12445,0
RpotKKΩ1 = +Ω1
1 KΩ + Rpot = 26,431 KΩ
Rpot = 25,431 KΩ
Karena merupakan hambatan variabel maka digunakan
hambatan 100 KΩ.
Set point dua
Vout =
Rpot
VRpotR
R 12.1
1+
; dengan R1 = 1 KΩ
86 V = RpotK
K+Ω
Ω1
10,4 .12V
= V
V12486,0
RpotKK+Ω
Ω1
1
1 KΩ + Rpot = 24,691 KΩ
91 KΩ Rpot = 23,6
52

Karena Rpo merupakan hambatan variabel maka digunakan
hambatan 100 KΩ.
t
Vout =
t
Set poin tiga
VRpotR
R 12.1
1+
; dengan R1 = 1 KΩ
RpotKK+Ω
Ω1
10,524 V = .12V
= V
V12524,0
RpotKK+Ω
Ω1
1
1 KΩ + Rpot = 22,899 KΩ
Rpot = 21,899 KΩ
Karena Rpot merupakan hambatan variabel maka digunakan
hambatan set point secara nyata adalah : 100 KΩ. Gambar rangkaian
Gambar 3.8 Rangkaian Set Point
53

3. 6 Pengen
Penguat proporsional integral merupakan gabungan dari penguat
proporsional dan integral, m ngan dari pengendalinya meliputi rangkaian
Proporsional, I egral. Pada perancangan ini, tipe IC yang
digunakan adalah LM324. Alasannya karena dalam satu IC terdapat 4 buah OpAmp
dan hanya mem
3. 6. 1 Pengendali Proporsional
Dari penyepadanan alat-alat kontrol PI diperoleh nilai penguatan
proporsional (Kp) = 2,85. Dari persamaan (2-1) :
Vout = Kp Ve + Vo
dengan Vout = tegangan output
Kp =
dali
aka peranca
ntegral dan Proporsional Int
butuhkan satu sumber tegangan (VCC).
-1
2
RR
(Gain)
Ve = tegangan
(Kp) = 2,85 dan dengan nilai R2 = 2,85 KΩ dapat
dihitung nilai R1 dari persamaan yang ada di atas.
error
Maka dengan nilai
Kp = 1
2
R
R
2,85 = 1R
K 2,85 Ω
1R =2,85
K 2,85 Ω
54

R1 = 1 KΩ
Karena R2 merupakan hambatan variabel maka nilai hambatan dari R2
dapat diatur dari 0 sampai 5 KΩ. Hal ini dikarenakan penulis memakai
hambatan variabel dengan nilai 5 KΩ. Rancangan dari rangkaian kendali
r 3.9. proporsional dapat dilihat pada gamba
G bam ar 3.9 Rangkaian penguat proporsional
3. 6. 2
Dari penyepadanan alat-alat kontrol PI yang dilakukan sebelumnya,
diperoleh nilai waktu integral (Ti) = 100. Mengacu pada persamaan (2-3) :
KI =
Pengendali Integral
Vout = KI ∫ + VoutVedt0
)0(
dengan Vout = tegangan output
t
11.1CR
(Integration gain)
Ti = RI . CI (waktu integral)
Ve = error voltage
55

Vout (0) = initial output voltage
Maka dengan nilai (Ti) = 100 dan dengan nilai RI = 1 KΩ kita dapat
menghitung nilai C1 dari persamaan yang ada di atas.
Ti = RI . CI
100 = 1 KΩ. CI
CI = ΩK1
100 CI = 0,1 F
Karena RI merupakan hamb an variabel maka nilai hambatan dari RI
t l ini dikarenakan dipakai hambatan variabel
dengan n
at
dapat dia ur dari 0 sampai 1 KΩ. Ha
ilai 1 KΩ. Rancangan dari rangkaian kendali proporsional dapat dilihat
pada gambar 3.10.
Gambar 3.10 Rangkaian penguat integral
3. 6. 3 Pengendali Proporsional Integral
Pada perancangan rangkaian penguat proporsional integral dengan
penguat penjumlah, pengendali proporsional tidak perlu dikuatkan lagi.
Sehingga nilai penguatan untuk pengendali proporsional sebesar 1 kali. Untuk
pengendali integral dibutuhkan penguatan yang sama yaitu sebesar kali, hal ini
56

disebabka alam dali integral terdapat konstanta Kp.
Hal ini dapat dilihat pada persamaan (2-5) atau pada persamaan (2-7).
n karena d rumusan pengen
m (t) = Kp e(t) + ∫t
I
dtteT 0
)(
Untuk kendali proporsional dibutuhkan penguatan satu kali maka :
pK
135R =
R
Jika nilai R5 = 1 KΩ maka :
R3 = 1
1 ΩK
R3 = 1 KΩ
Untuk kendali integral dibutuhkan penguatan sebesar 1 kali maka :
145 =
RR
Jika nilai R5 = 1 KΩ maka :
R4 = 1
1 ΩK
R4 = 1 KΩ
Diagram blok rangkaian pengendali PI dapat dilihat pada gambar 3.11.
57
Gambar 3.11 Diagram blok rangkaian pengendali PI
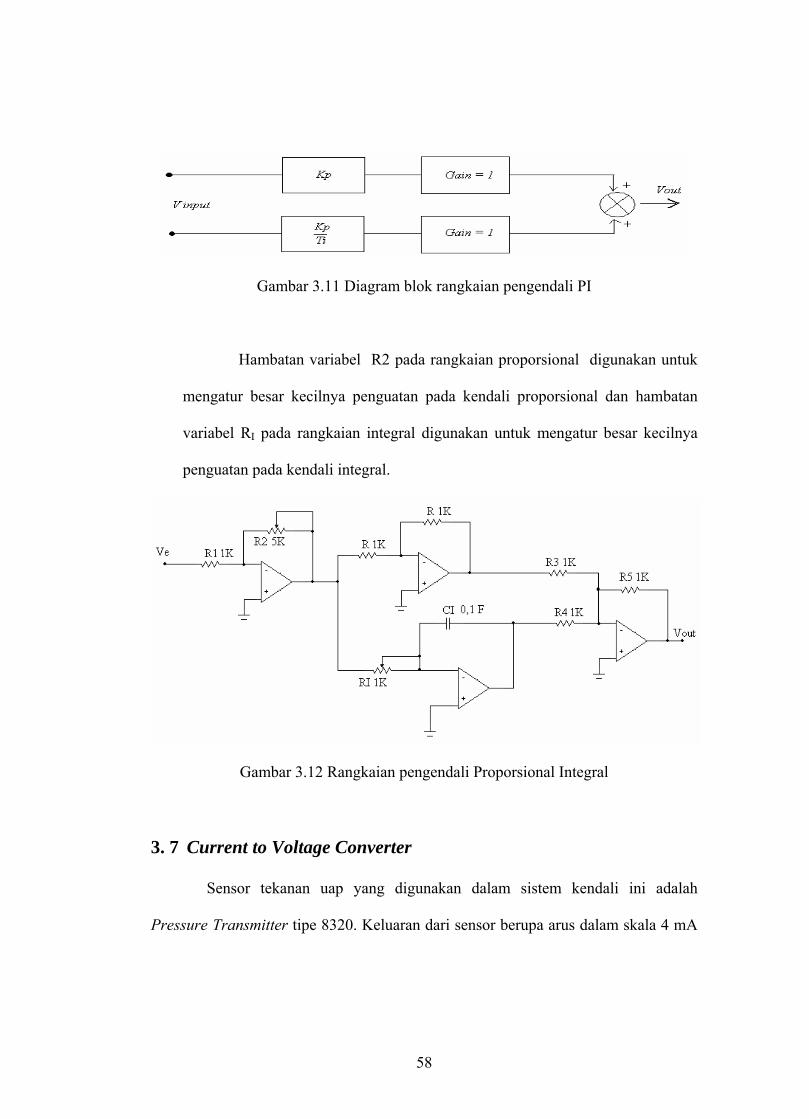
H uk
mengatur besar kecilnya penguatan pada kendali proporsional dan hambatan
variabel R pada rangkaian integral digunakan untuk mengatur besar kecilnya
penguatan pada kendali integral.
ambatan variabel R2 pada rangkaian proporsional digunakan unt
I
Gambar 3.12 Rangkaian pengendali Proporsional Integral
3. 7 Current to Voltage Converter
Sens
Pres
or tekanan uap yang digunakan dalam sistem kendali ini adalah
sure Transmitter tipe 8320. Keluaran dari sensor berupa arus dalam skala 4 mA
58

samp
penu ai beban. Sensor ini memiliki beban (RA)
maksimum sebesar :
RA [Ω] =
ai 20 mA. Untuk mengubah keluaran sensor dari arus menjadi tegangan maka
lis menggunakan Resistor sebag
( )][02,0
][10][A
VVU B − (3.4)
dengan UB adalah tegangan catuan. Apabila menggunakan tegangan catuan
12 V maka besar beban maksimum :
RA [Ω] = ][02,0
][10][12A
VV −
=][02,0 A
][2 V
RA [Ω] = 100 Ω
enggunakan beban 100 Ω pada keluaran
sensor te
ngkaian deteksi error atau bisa disebut sebagai rangkaian
penguat beda. Dilihat dari persamaan (2.9) maka :
M =
Dari perhitungan inilah penulis m
kanan, sehingga keluaran sensor berubah dari arus menjadi tegangan.
3. 8 Rangkaian deteksi error
Karena penguatan yang diinginkan hanya satu kali maka rangkaian ini
berfungsi sebagai ra
( )12 VV −
Ve = (V
Ve ; karena M = 1
Sehingga bila dilihat dari persamaan (2.10) :
2 -V1)
59

).1
2
RR
Ve = (V2 - V1
1
2R = 1 ; j
Rika R2 = 1K
4 = 1KΩ R1 = R3 = R2 = R
Rangkaian penguat beda dapat dilihat pada gambar di bawah ini :
Gambar 3.13. Rangkaian penguat beda
3. 9 Pulse W
Realis da perancangan dengan memanfaatkan OpAmp,
rangakaian pe g. Pembangkit segitiga
merupakan konfigurasi integrator yang dipadukan dengan pembangkit gelombang
kotak.
idth Modulation (PWM)
asi PWM pa
mbangkit segitiga dan rangkaian pembandin
60

Gambar 3.14 Rangkaian PWM
Pada perancangan PWM ini besaran yang diinginkan adalah sebagai berikut
:
Vpp = 1,5 V
F = 5 Khz
Tegangan catu : +Vcc = 12 V dan –Vee = 0 V
Berdasarkan persamaan (2.17) maka :
Vpp = 2
3..2R
RVsat
VppRVsat 3..2
R2 =
Dengan R3
R2 =
= 1 KΩ maka besarnya R2 :
5,110.1.12.2 3
R2 = 16 KΩ
61

Untuk menentukan besarnya R4, berdasarkan persamaan (2.18) maka :
F = CRR
R2.4.3.4
R4 = CfR
R..3.4
2
Dengan u C = 0,1 F dan nilai f = 5 Khz, R2 = 16 KΩ dan R3 = 1KΩ
maka :
R4 = CfR
R..3.4
2
610.1,0.5.1.416
−ΩΩ
KhzKK R4 =
R4 = 8 KΩ
R1 dapat dihitung dengan memparalelkan R2 dan R3 yaitu :
R1 = 32
3.2RR
RR+
Ω+ΩΩΩ
KKKK116
1.16 R1 =
R1 = 0,941 KΩ
R1 1 KΩ ≈
62
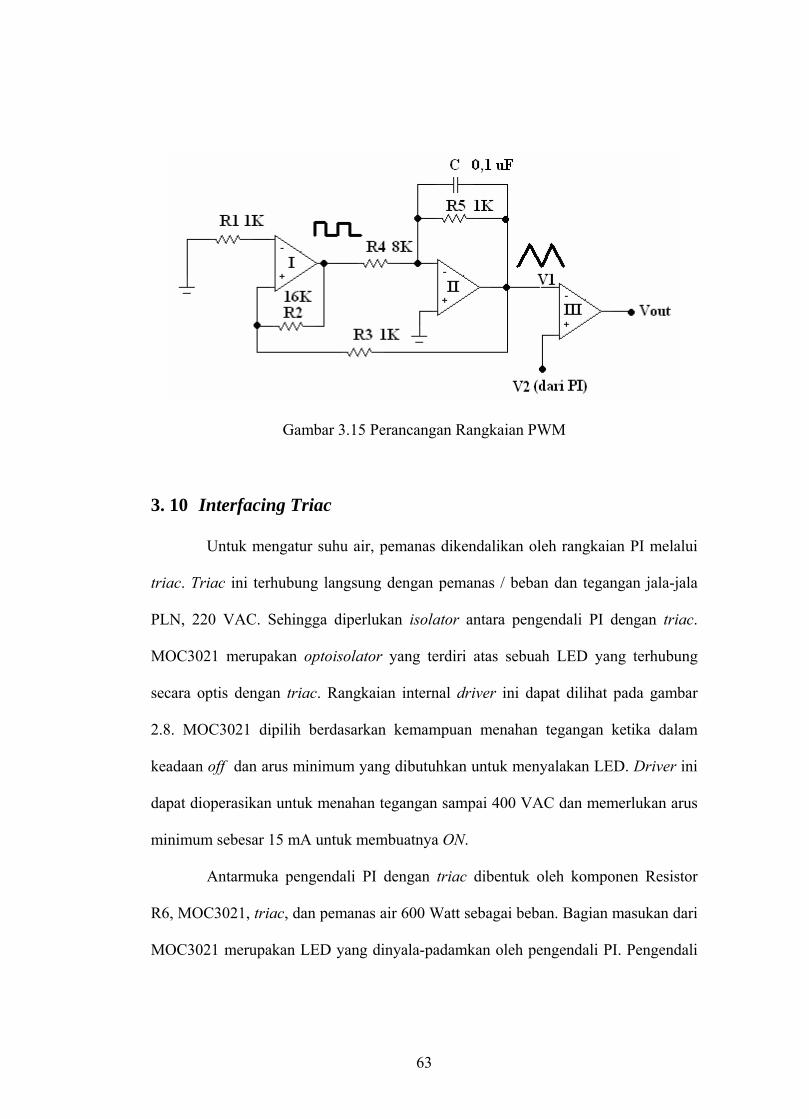
Gambar 3.15 Perancangan Rangkaian PWM
3. 10 Interf
Untuk ngatur suhu air, pemanas dikendalikan oleh rangkaian PI melalui
triac. Triac ini terhubung langsung dengan pemanas / beban dan tegangan jala-jala
PLN, 220 VAC. Sehingga diperlukan isolator antara pengendali PI dengan triac.
MOC3021 merupakan optoisolator yang terdiri atas sebuah LED yang terhubung
secara optis dengan triac. Rangkaian internal driver ini dapat dilihat pada gambar
2.8. MOC3021 dipilih berdasarkan kemampuan menahan tegangan ketika dalam
keadaan off dan arus minimum yang dibutuhkan untuk menyalakan LED. Driver ini
dapat dioperasikan untuk menahan tegangan sampai 400 VAC dan memerlukan arus
minimum sebesar 15 mA untuk membuatnya ON.
Antarmuka pengendali PI dengan triac dibentuk oleh komponen Resistor
R6, MOC3021, triac, dan pemanas air 600 Watt sebagai beban. Bagian masukan dari
MOC3021 merupakan LED yang dinyala-padamkan oleh pengendali PI. Pengendali
acing Triac
me
63
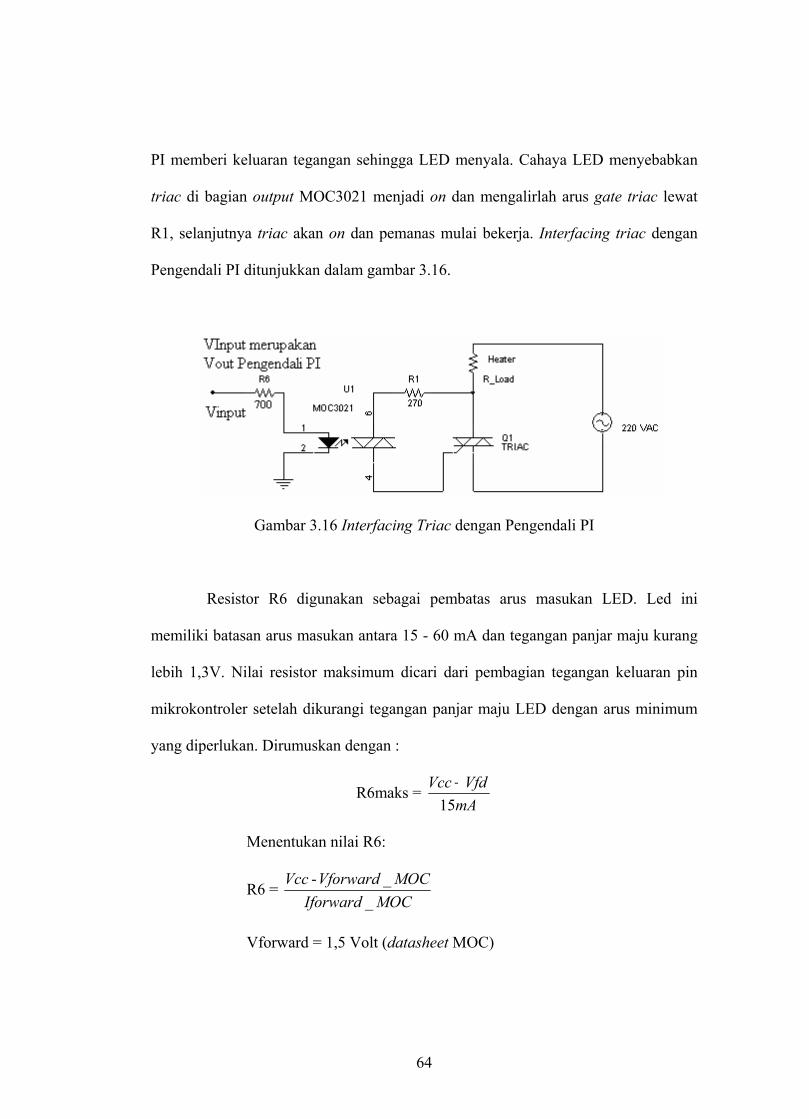
PI memberi keluaran tegangan sehingga LED menyala. Cahaya LED menyebabkan
triac di bagian output MOC3021 menjadi on dan mengalirlah arus gate triac lewat
R1, selanjutnya triac akan on dan pemanas mulai bekerja. Interfacing triac dengan
Pengendali PI ditunjukkan dalam gambar 3.16.
Gambar 3.16 Interfacing Triac dengan Pengendali PI
Resistor R6 digunakan sebagai pembatas arus masukan LED. Led ini
memiliki batasan arus masukan antara 15 - 60 mA dan tegangan panjar maju kurang
lebih 1,3V. Nilai resistor maksimum dicari dari pembagian tegangan keluaran pin
mikrokontroler setelah dikurangi tegangan panjar maju LED dengan arus minimum
yang diperlukan. Dirumuskan dengan :
R6maks = mA
VfdVcc15
−
Menentukan nilai R6:
R6 = MOCIforward
MOCVforwardVcc_
_-
Vforward = 1,5 Volt (datasheet MOC)
64

I
R6 =
forward = 15 mA (datasheet MOC)
mAvv
155,112 −
R6 = 700 Ω
= 17,14 mA. Menentukan R1 :
Nilai resistor maksimal adalah 700 Ω sehingga didapatkan nilai IForward_MOC
Vin(pk) = 220 X 2
Vin(pk) = 311,12 Volt
R1 = axIpkVin
m)(
2,1126,311 R1 =
R1 = 259,272 Ω
Karena R1 minimum adalah 259,272 Ω maka dipilih R1 = 270 Ω.
65

BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan ditunjukkan hasil pengamatan dan pembahasan dari
Uap Denagn Mengguanakan Pengendali
roporsional Integral (PI). Pengujian dilakukan dengan cara memilih level tekanan
ang sudah ditentukan melalui set point. Level tekanan 1 adalah tegangan 0,445
gangan 0,524 Volt.
Pengambilan data yang digunakan oleh penulis adalah dengan cara merekam
inerja dari hardware yang diukur dengan multimeter digital berdasarkan selang
aktu yang telah ditentukan. Cara pengambilan data tersebut dilakukan agar
didapatkan data yang akurat, sela selang waktu pengambilan data
dipe
Plant
Pada Plant yang dibuat digunakan sebuah sensor tekanan yaitu Pressure
Transmitter dengan tipe 8320 dari Burkert dengan rentang tekanan 0 sampai dengan
10 Bar. Sensor ini khusus digunakan sebagai sensor tekanan uap air.
Tegangan masukan yang dibutuhkan oleh piranti ini berkisar antara 10
sampai dengan 30 VDC. Sensor ini mempunyai output 4 sampai dengan 20 mA dan
Pengendali Tekanan pada Ketel
P
y
Volt, level tekanan 2 adalah tegangan 0,486 Volt dan level tekanan yang ke 3 adalah
te
k
w
in itu apabila
rpendek maka data yang diperoleh akan lebih akurat lagi.
4.1 Kinerja
66

sangat mudah digunakan karena hanya mempunyai 2 kabel penghubung. Kelebihan
lain dari sensor ini adalah dari segi ketahanannya terhadap suhu. Sensor ini tahan
terhadap suhu -40 sampai +100οC.
Tekanan pada Boiler diatur sedemikian sehingga sesuai dengan nilai set point
yang diinginkan. Pada system ini jika tegangan keluaran dari Plant sama dengan
gangan dari set point yang berarti error nol maka tekanan pada Boiler akan
n mendekati nilai set point maka suhu pada pemanas akan
tekanan yang
diingin
buatan kontrol dari pengendali tekanan ini
mengal
yaitu :
te
dipertahankan. Semaki
semakin turun. Jika tegangan pada sensor tekanan lebih besar dari tegangan pada set
point maka pemanas akan mati dan tekanan pada Boiler akan turun. Hal ini akan
terus berlanjut hingga tekanan pada Boiler sesuai dengan level
kan.
4.2 Pengamatan dan Analisis
Pada bagian ini akan ditunjukkan pengamatan dan analisis dari sistem yang
bekerja. Pada kenyataannya pem
ami beberapa kendala dan kesulitan, baik itu faktor dari luar atau faktor dari
pengendali itu sendiri. Dalam tugas akhir ini hanya dapat diselesaikan sampai bagian
Plant saja, sedangkan bagian pengendali atau kontrol tekanan masih dalam
pengerjaan dikarenakan mengalami beberapa kendala dan kesulitan sehingga belum
didapatkan data yang diperlukan untuk analisa.
Sistem pengendali pada tugas akhir ini pada dasarnya meliputi 2 bagian dasar
67

Plant
Pengendali tekanan Boiler dengan basis rangkaian PI
4.2.1 Analisa Plant
Analisis dari plant yang telah dibuat meliputi analisa Boiler, pemanas
dan sensor tekanan yang digunakan. Plant yang dibuat untuk tugas akhir ini
merupakan panci bertekanan atau biasa disebut dengan istilah Boiler. Pada gambar 4.
1 ditunjukkan gambar dari boiler yang telah dibuat. Pemanas yang digunakan adalah
kompor listrik dengan daya 600W.
Gambar 4. 1 Boiler
Setelah Plant selesai dibuat maka dilakukan pengecekan dengan
menggunakan sensor tekanan yang akan digunakan. Berdasarkan percobaan yang
68

telah dilakukan pada Boiler maka dapat disimpulkan bahwa Plant dapat bekerja
dengan baik dan lancar. Selain itu tegangan keluaran dari sensor juga sesuai dengan
level tekanan pada Boiler.
4.2.2 Analisis Pengendali
Karena penguat proporsional integral merupakan gabungan dari
penguat proporsional dan penguat integral maka penguat ini mempunyai dua mode
yaitu mode P dan mode I. Dalam analisa meliputi rangkaian Proporsional, rangkaian
Integral, set point, rangkaian deteksi error, PWM dan rangkaian Driver pemanas.
4.2.2.1 Analisis Set Point
linear, logaritmis) maka tegangan yang dihasilkan kurang
ingga mengakibatkan kekacauan pada sistem kendali. Sehingga disarankan
menggunaka nggunakan TriPort maka tegangan yang
dihasilkan jauh lebih stabil dantidak akan mengacaukan kinerja system kendali.
Dalam percobaan yang dilakukan terhadap rangkaian setpoint terdapat
kendala pada pemilihan jenis komponen yang digunakan. Dalam hal ini kendala yang
dihadapi terdapat pada Potensiometer yang digunakan. Jika diguanakan
Potensiometer yang biasa (
stabil seh
n TriPort. Dengan me
69

4.2.2.2 Analisis Rangkaian Deteksi Error
dibuat dapat bekerja dengan baik.
Percobaan terh
P
guat
sederhana dengan menggunakan Op-Amp. Penguatan yang diinginkan pada
rangkaian proporsional ini sebesar 2,85 kali.
.2.2.4 Analisis Rangkaian Integral
kaian pengendali
integral terdap
umnya, diperoleh nilai
konstanta waktu integral (Ti) = 100. Mengacu pada persamaan (2-3) :
Vout = K )0(
dengan Vout
Rangkaian deteksi error yang
adap rangkaian deteksi error dilakukan dengan mengurangkan dua
tegangan yang dihasilkan dari rangkaian pembagi tegangan.
4.2.2.3 Analisis Rangkaian Proporsional
ercobaan terhadap rangkaian proporsional berjalan lancer. Hal ini
dikarenakan rangkaian proporsional pada dasarnya merupakan rangkaian pen
4
Dalam percobaan yang dilakukan terhadap rang
at kendala pada pemilihan jenis komponen yang digunakan. Hal ini
dispesifikasikan pada pemilihan komponen Resistor dan Kapasitor. Dari
penyepadanan alat-alat kontrol PI yang dilakukan sebel
I ∫ +t
VoutVedt0
= tegangan output
70
K = I11
1 (Integration gain) .CR
i = RI . CI (waktu integral)
Vout (0) = initial output voltage
Pemilihan kombinasi komponen R dan C untuk mendapatkan hasil
berupa konstanta T ternyata tidaklah mudah. Hal inilah yang menyebabkan keluaran
dari pengendali Integral yang telah dibuat tidak sesuai dengan apa yang diharapkan.
nalisis PWM
telah dikerjakan berdasarkan perancangan. Dalam
percobaan terhadap rangkaian dengan masukan berupa tegangan yang diubah-ubah
didapatkan keluaran berupa pulsa-pulsa tegangan dengan periode tegangan yang
berubah-ubah.
Setelah n ko g sesuai dengan perancangan
sebelumnya maka dilakukan percobaan dengan menggabungkan rangkaian
Proporsional,
yang dibutuhkan oleh Driver. Setelah dilakukan beberapa kali pergantian pada
T
Ve = error voltage
I I
I
4.2.2.5 A
Rangkaian PWM
digunaka mbinasi RI dan CI yan
rangkaian Integral, set point, rangkaian deteksi error, PWM dan
rangkaian Driver pemanas. Ternyata pada kenyataannya Driver tidak dapat aktif
dikarenakan arus pada keluaran PWM kuarang dari batas minimum arus masukan
71

kombinasi RI didapatkan tetap sama yaitu Driver tidak
aktif. Karena h
dan CI ternyata hasil yang
al inilah maka tidak dapat dilakukan percobaan dengan menggunakan
Plant dan pengendali Proporsional Integral secara bersamaan.
72

BAB V
PENUTUP
.1 Kesimpulan
Berdasarkan perancangan dan pengamatan yang telah dilakukan, maka
iperoleh beberapa kesimpulan sebagai berikut :
1. Sistem yang dikerjakan tidak dapat berjalan sesuai dengan tujuan
dan manfaat yang diharapkan, yaitu menjaga kestabilan tekanan
pada Boiler.
2. Nilai level tegangan yang diperoleh mengalami perbedaan yaitu
pada perancangan diinginkan 12 Volt, tetapi hanya tercapai 11,85
Volt. Hal ini terjadi pada rangkaian Catu Daya.
3. Dengan menggun an berupa rangkaian Integral maka
tidak diperlukan lagi rangkaian fset tegangan.
5.2. Saran
aran bagi pengembangan penelitian ini untuk menuju ke arah
yang lebi
n yang tepat sehingga didapatkan
ter yang tepat.
5
d
akan tambah
Of
Beberapa s
h baik dan sempurna diantaranya adalah sebagai berikut :
1. Lakukan pemilihan kompone
hasil yang memuaskan. Terutama pemilihan kombinasi
komponen RI dan CI pada rangkaian Integral serta gunakan
Potensiome
73

2. Membuat media Plant yang lebih baik dalam hal untuk
mengurangi kebocoran tekanan pada Boiler.
74

DAFTAR PUSTAKA
[1] http://www.Elektroindonesia.com.
[2] Ogata K, 1997, Teknik Kontrol Automatik, Erlangga, Yogyakarta.
[3] Pakpahan S, 1994, Kontrol Otomatik, Erlangga, Jakarta.
[4] A.Muir Syamsir, 1986, Pesawat-pesawat Konversi Energi, Rajawali Pers,
Jakarta.
[5] http://www. Te. Ugm. Ac. Id.
75