otomatisasi difraktometer neutron menggunakan pc
TRANSCRIPT

i
KARYA TULIS ILMIAH
OTOMATISASI DIFRAKTOMETER NEUTRON
MENGGUNAKAN PC
Oleh :
Ni Luh Putu Trisnawati, S.Si., M.Si.
JURUSAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS UDAYANA
2017

ii
HALAMAN PENGESAHAN
1
Judul Karya Tulis Ilmiah : Otomatisasi Difraktometer Neutron Menggunakan PC
2 Ketua Peneliti:
a. Nama lengkap dengan
gelar
: Ni Luh Putu Trisnawati, S.Si., M.Si.
b. Jenis Kelamin : Perempuan
c. Pangkat/Golongan/NIP : Penata Muda Tk 1/III-b/19720212 200003 2 001
d. Jabatan Fungsional : Lektor
e. Fakultas/Jurusan : MIPA/Fisika
f. Universitas : Udayana
g
Bidang Ilmu yang diteliti
: Instrumentasi Difraktometer Neutron
3
4
Anggota Peneliti:
a. Nama Lengkap
b. NIDN
c. Perguruan Tinggi
Jumlah Peneliti:
:
:
:
:
I Ketut Sukarasa, S.Si., M.Si.
196906011998021001
Universitas Udayana
2 orang
5 Lokasi : Fisika FMIPA Unud
6 Kerjasama
a. Nama Instansi : -
7 Jangka Waktu Penelitian : 6 (lima) bulan
Denpasar, 1 Januari 2017
Mengetahui, Ketua Peneliti
Dekan FMIPA Unud
Drs. Ida Bagus Made Suaskara, M.Si Ni Luh Putu Trisnawati, S.Si., M.Si.
NIP. 19660611 199702 1 001 NIP. 19720212 200002 2 001

iii
KATA PENGANTAR
Kepada Tuhan Yang Maha Esa/ Ida Sanghyang Widhi Wasa penulis panjatkan puji
dan syukur, karena berat karuniaNyalah penulis dapat menyelesaiakan karya ilmiah yang
berjudul “Otomatisasi Difraktometer Neutron menggunakan PC” tepat pada waktunya.
Seiring dengan kebahagian penulis, penulis menyampaikan ucapan terima kasih dan
penghargaan sebesar-besarnya kepada: kedua orang tua penulis dan I Nengah Artawan atas
dorongan materiil, semangat dan doa. Kepada bapak Drs. Ilias Ginting, M.Sc., bapak Hendro,
bapak Ir. I.B. Sujana Manuaba, M.Sc., dan seluruh staf karyawan PPTN-BATAN Bandung
atas segala bantuannya, semoga Tuhan Yang Maha Esa memberikan rahmatNya.
Terakhir harapan penulis adalah saran dan kritik yang bersifat membangun dari
pembaca atas kekeliruan penulis, dan semoga tulisan ini bermanfaat bagi perkembangan ilmu
pengetahuan pada umumnya dan ilmu fisika khususnya.
Denpasar, 1 Januari 2017
Penyusun

iv
ABSTRAK
Sistem hubungan langsung antara Difraktometer Neutron dengan IBM PC-XT
menggunakan suatu perangkat antar-muka buatan Canberra telah dilakukan dengan
menggunakan bahasa pemrograman Turbo Pascal. Akan tetapi alat tersebut tidak dapat
dioperasikan lagi karena beberapa kerusakan. Dengan melakukan perbaikan pada hard-ware
dan soft-ware nya, difarktometer neutron ini dapat dioperasikan lagi.
Difraktometer Neutron ini memperoleh sinar atau berkas neutron dari berkas lubang
yang terdapat pada Reaktor Triga Mark II Bandung. Sistem pencacah yang digunakan ialah
sistem Datanim buatan Canberra Industries Inc, yang terdiri atas modul eksekutif dan modul
operasional. Modul eksekutif yang dipakai ialah modul 6726. Modul operasional untuk
menjalankan motor dipakai model 6647/6648, dan untuk akusisi data dipakai modul 6326.
v
DAFTAR ISI
LEMBAR PENGESAHAN ii
KATA PENGANTAR iii
ABSTRAK
DAFTAR ISI
iv
v
BAB I PENDAHULUAN 1
1.1
1.2
1.3
1.4
Latar Belakang
Rumusan Masalah
Batasan Masalah
Tujuan
1
2
2
2
BAB II TINJAUAN PUSTAKA 3
2.1
2.2
2.3
2.4
2.5
Prinsip Kerja Difraktometer Neutron
Konsep Dasar Komunikasi Data
Sistem DATANIM
Dual Counter/Timer Model 6326
Kartu Komunikasi Asinkron Intel 8250
3
7
9
14
15
BAB III METODOLOGI PENELITIAN 18
3.1 Perangkat Lunak Difraktometer Neutron 18
3.1.1
3.1.2
3.1.3
Protokol komunikasi
Pengiriman Data Karakter
Penerimaan Data Karakter
18
19
20
BAB IV HASIL DAN PEMBAHASAN 22
BAB V KESIMPULAN 24
PUSTAKA 25

1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Di bidang penelitian, difraktometer khususnya difraktometer sinar-X dan sinar
neutron sering digunakan untuk penyelidikan struktur kristal bahan. Pada Pusat Penelitian
Teknik Nuklir BATAN (PPTN-BATAN) telah dibuat dan dikembangkan fasilitas berbagai
peralatan untuk hamburan neutron, antara lain difraktometer neutron. Bila dibandingkan
dengan sinar-X, pemakaian neutron mempunyai banyak kelebihan dalam hal ketelitian
hasilnya dan lebih luasnya jangkauan pengamatan yang dapat dilakukan.
Dalam hal ini peneliti dihadapkan dengan pekerjaan yang berhubungan dengan
reaktor yang merupakan sumber neutron. Di lingkungan reaktor radiasi-radiasi yang
terpancar, baik berupa sinar gamma maupun neutron itu sendiri mempunyai daya tembus
yang sangat besar terhadap material. Radiasi berlebih tersebut membahayakan para peneliti.
Upaya penanggulangan bahaya ini dilakukan dengan berbagai cara diantaranya
dengan penyempurnaan peralatan yang terletak pada reaktornya maupun peralatan
perlindungan keselamatannya. Selain upaya tersebut, dapat juga dilakukan dengan
menghubungkan peralatan penelitian neutron ini dengan peralatan pengontrol yang
dikendalikan oleh komputer, mengingat komputer mempunyai fasilitas penyimpan data
dengan kapasitas yang cukup besar dan sangat fleksibel, sehingga dengan pembuatan
program aplikasi dapat pula dikembangkan analisa data. Dengan adanya peralatan kontrol ini,
pemakai tidak perlu berhubungan langsung dengan peralatan yang berada dalam ruang
reaktor, kecuali untuk hal-hal tertentu yang harus dilakukan secara manual seperti
menghubungkan atau menyalakan peralatan yang akan dipakai dan memasang cuplikan.
Selain itu dengan adanya pengontrol ini peneliti tidak perlu menunggu peralatan selama
penelitian yang biasanya berlangsung cukup lama.
Di PPTN-BATAN sistem hubungan langsung difraktometer neutron dengan IBM PC-
XT menggunakan perangkat antar antar muka telah dilakukan, akan tetapi alat tersebut tidak
dapat dioperasikan lagi karena ada beberapa kerusakan. Berdasarkan hal tersebut diatas,
maka dalam makalah ini akan dibahas perbaikan perangkat lunak untuk mengontrol sistem
antar muka antara difraktometer neutron dengan PC.

2
1.2 Rumusan Masalah
Berdasarkan uraian latar belakang diatas dapat ditentukan rumusan masalah sebagai berikut :
1) Bagaimana melakukan perbaikan perangkat lunak untuk menggerakkan difraktometer
neutron?
2) Apakah perangkat lunak tersebut berhasil menggerakkan difraktometer neutron?
1.3 Batasan Masalah
Adapun batasan masalah pada makalah ini adalah sebagai berikut:
1) Perbaikan yang dilakukan hanya perbaikan perangkat lunak
2) Bahasa pemrograman yang digunakan adalah bahasa pemrograman Turbo Pascal
versi .0.5.
1.4 Tujuan Penelitian
Adapun tujuan penelitian ini adalah untuk memperbaiki perangkat lunak agar
difraktometer neutron dapat dioperasikan kembali.

3
BAB II
TINJAUAN PUSTAKA
Semua komponen sistem DATANIM ditempatkan dengan cara sistem modul. Untuk
modul-modul akuisisi data, kontrol data dan keluaran data disebut “modul Operasional” dan
modul yang mengatur sistem disebut “sistem Eksekutif”. Sebelum membahas tentang modul
antarmuka, akan dibahas mengenai gambaran menyeluruh tentang cara kerja difraktometer
neutron lengkap dengan sistem pencacahannya.
2.1 Prinsip Kerja Difraktometer Neutron
Modul antarmuka yang digunakan dalam percobaan difraktometer adalah modul
antarmuka 6726 yang merupakan bagian sistem pencacah (disebut sistem DATANIM) yang
memberikan fasilitas komunikasi serial asinkron. Level isyarat yang digunakan sesuai dengan
standar EIA (Electronic Industry Association) RS-232C (Recomended Standard number 232,
revision C). Semua intruksi yang diterima dan dikirimkan berupa karakter-karakter ASCII
tertentu yang sudah distandarkan oleh Canberra Industries, Inc.
Perangkat lunak untuk mengontrol sistem antarmuka antara difraktometer neutron
dengan PC dilengkapi dengan IO serial card menggunakan Modul antarmuka 6726 sebagai
sistem master executive buatan Canberra Industries. Jantung dari IO serial card berupa
sebuah chip IC buatan Intel dengan nomor seri INS8250 yang dapat diprogram dan hanya
untuk komunikasi asinkron. Untuk menggerakkan lengan detektor utama digunakan sebuah
step motor. Sistem pencacahan terdiri dari modul-modul yang dihubungkan secara paralel
melalui 22 jalur bus data. Sistem pencacahan tersebut dinamakan sistem datanim, dan
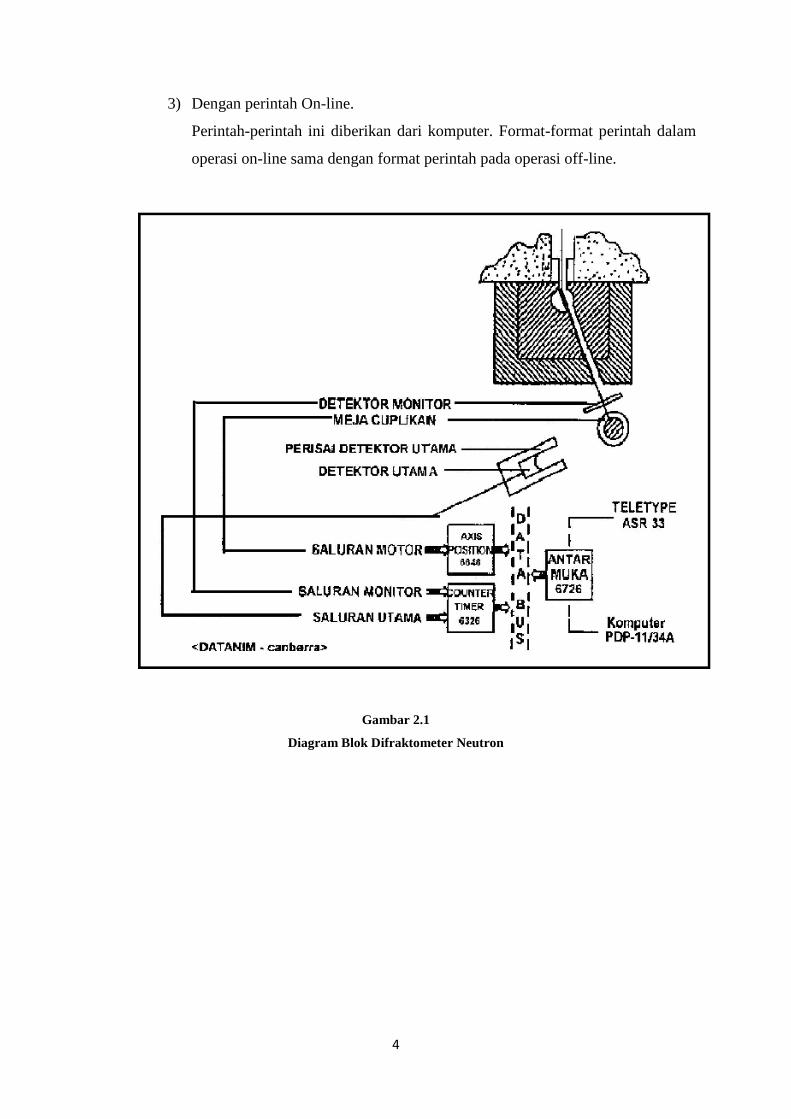
masing-masing modul diberi nomor address dua digit. Lihat Gambar 2.1. Untuk menjalankan
peralatan difraktometer ini, dapat dilakukan dengan tiga cara, diantaranya:
1) Dengan cara manual.
Perintah-perintah untuk menjalankan motor, menentukan arah dan laju
dikerjakan oleh Modul Axis Pisitioner. Perintah-perintah pengambilan data,
pembacaan data (cetak data), menentukan nilai preset count atau preset time
dilakukan oleh Modul Dual Counter/Timer.
2) Dengan perintah off-line.
Perintah off-line diberikan dari Teletype ASR33 menggunakan karakter-
karakter instruksi khusus. Seluruh instruksi dan data cacahan dapat dicetak.
4
3) Dengan perintah On-line.
Perintah-perintah ini diberikan dari komputer. Format-format perintah dalam
operasi on-line sama dengan format perintah pada operasi off-line.
Gambar 2.1
Diagram Blok Difraktometer Neutron

5
Komunikasi data umumnya berkaian dengan pertukaran data dari satu komputer ke
peralatan lain melalui alur komunikasi. Proses komunikasi meliputi Data Communication
Equipment (DCE), format data atau protokol komunikasi data dan teknik komunikasi. Pada
transmisi asinkron, interval waktu antara karakter-karakter yang ditransmisikan boleh
berbeda. Transmisi untuk tiap karakter dikontrol oleh bit start dan bit stop. Tiap-tiap bit
informasi dikirim berurutan pada satu kanal tunggal.
Untuk difraktometer neutron, panjang gelombang neutron dari reaktor harus dipilih
sekitar 1 Ao sesuai dengan orde jarak antar bidang struktur kristal pada umumnya, yang dapat
diperoleh dengan bantuan suatu kristal tunggal sebagai monokromator. Dalam penelitian ini
digunakan monokromator kristal tunggal Cu(111). Bagan difraktometer secara keseluruhan
ditunjukkan pada Gambar 2.2.
Gambar 2.2 Difraktometer pada percobaan difraksi neutron
Berkas neutron monokromatis melewati pintu kolimator, kemudian dijatuhkan pada
cuplikan yang terletak diatas meja cuplikan. Didepan pintu kolimator ini dipasang detektor
monitor untuk memantau jumlah neutron yang mengarah pada cuplikan. Neutron-neutron
yang dihamburkan oleh cuplikan melewati kolimator ketiga dan dicacah oleh detektor utama.
Pergerakan detektor utama yang diletakkan pada lengan detektor digerakkan oleh motor

6
langkah (stepping motor). Jumlah pulsa yang dihamburkan dan ditangkap oleh detektor
utama diperagakan oleh modul counter/timer. Diagram blok pencacah ditunjukkan pada
Gambar 2.2.
Gambar 2.3 Diagram blok sistem pencacah
Berkas neutron yang datang pada pntu kolimator kedua dicacah oleh detektor monitor
BF3(1). Pulsa yang dihasilkan oleh detektor monitor ini merupakan input bagi pre-amplifier
(2), yang dihubungkan dengan linier-amplifier (3), yang berada diruang pencacah. Setelah
melalui linier amplifier kemudian dilakukan pencacahan oleh dual counter/timer (4), yang
berfungsi sebagai preset scaler. Jika cacahan sudah menunjukkkan jumlah tertentu,
pencacahan akan berhenti. Setelah itu pulsa akan disampaikan dari dual control (4) ke
pengontrol difraktometer neutron (5). Berkas neutron yang berasal dari cuplikan yang sampai
pada detektor utama He3 (6), menghasilkan pulsa-pulsa bagi pre-amplifier (7), kemudian
diperkuat oleh linier amplifier (8). Pencacahan dilakukan oleh dual counter/timer (4), dan
hasil cacahannya ditampilkan pada monitor komputer.
Setelah pencatatan selesai maka pengontrol difraktometer memberi perintah pada
motor (10) untuk memutar lengan detektor. Pulsa dikirim ke pengontrol difraktometer dan

7
selanjutnya pengontrol ini memberi perintah agar dual counter/timer dan axis positioner
mulai bekerja kembali. Proses ini berlangsung berulang-ulang sesuai perintah yang diberikan
melalui pengontrol difraktometer (komputer).
2.2 Konsep Dasar Komunikasi Data
Pada umumnya dalam perangkat komputer semua data dikerjakan secara paralel lewat
saluran bus-data. Penggarapan ini bisa berupa byte bagi data 8 bit, word bagi data 16 bit, dan
seterusnya. Disamping penggarapan intern, seringkali diperlukan transfer data antar
komputer. Perpindahan data dapat dilakukan dengan menggunakan dua cara yaitu
komunikasi data serial dan komunikasi data paralel.
Pada komunikasi data serial, bit-bit data tidak dikirimkan dala waktu yang bersamaan,
tetapi dikirim satu bit setiap waktu. Komunikasi data serial menempati bidang penggunaan
yang khas terutama digunakan untuk jarak lokal atau jarak jauh dengan dilengkapi modem.
Hal terpenting dari komunikasi data serial adalah frekuensi dari bit-bit yang dikirim.
Frekuensi ini disebut baud rate yaitu bit-bit yang terkirim tiap detik melalui satu jalur serial.
Baud rate standar adalah 110, 150, 300, 1200, 2400, 4800, dan 9600. Ada dua tipe
komunikasi data serial yang banyak digunakan dalam sistem komputer yaitu komunikasi data
asinkron dan komunikasi data sinkron.
Dalam komunikasi data serial asinkron, data dikirim bit per bit dalam waktu yang
sama, tanpa informasi detak. Sebelum digunakan untuk pengiriman data, jalur serial harus
dalam keadaan 1 (berlogik tinggi) atau yang biasa disebut dengan istilah tanda (mark).
Perubahan keadaan jalur serial dari 1 ke 0 atau juga disebut ruang (space), menunjukkan
adanya data yang dikirim. Format data pada komunikasi data serial asinkron ditunjukkan
pada Gambar 2.3.
Gambar 2.4 Contoh format data serial 8 bit

8
Struktur karakter asinkron terdiri atas 1 bit start yang selalu 0, diikuti 5 sampai 8 bit
data dan diakhiri dengan 1,11
2, 2 bit stop. Bit paritas bila diperlukan bisa ditambahkan
setelah bit data. Bit-bit ekstra seperti bit start, bit paritas, dan bit stop tersebut disisipkan
secara otomatis oleh bagian pengiriman. Pada saat penerimaan, bit-bit ekstra tersebut setelah
dideteksi akan dihilangkan oleh bagian penerima sehingga tinggal data yang akan diakses
lebih lanjut.
2.2.1 Start bit
Data yang dikirim selama berlangsungnya komunikasi data serial harus dapat diterima
dan dapat diterjemahkan. Untuk maksud ini, bagian pengirim perlu menambahkan secara
otomatis bit lain pada deretan bit data yang disebut Start Bit. Bit ini berfungsi untuk
menandai awal bit data serial, sehingga penerima mengetahui saat data serial baru diterima.
Jika jalur serial tidak memberi informasi data apapun, jalur serial berada dalam keadaan 1
(marking). Ini adalah kondisi normal dari jalur serial. Pada saat data ditransmisikan, jalur
serial ini berubah dari keadaan tinggi ke keadaan rendah selama paling sedikit 1 bit. Hal ini
disebabkan pada awal data karakter ditambahkan start bit yang berlogik 0 sebanyak 1 bit.
2.2.2 Parity bit
Bit lainnya yang dapat ditambahkan pada deretan bit data serial adalah parity bit (bit
paritas). Bit ini disisipkan oleh bagian pengirim dan diperlukan oleh bagian penerima. Dalam
suatu byte data, terdapat jumlah gebap „1‟ atau jumlah ganjil „1‟. Bit kedelapan atau kadang-
kadang bit kesembilan yang ditambahkan pada setiap byte sehingga membuat jumlah genap
atau ganjil. Inilah yang disebut parity bit (bit paritas). Ada dua sistem paritas, yaitu paritas
genap dan paritas ganjil. Bila bit paritas yang dibangkitkan kembali tidak cocok dengan bit
paritas yang direkam, maka terdapat satu kesalahan paing tidak 1 bit. Tetapi bila dua bit yang
berubah dari „1‟ menjadi „0‟ dan „0‟ menjadi „1‟, maka kesalahan seperti ini tidak akan
terdeteksi. Hal ini merupakan kelemahan dari sestem deteksi kesalahan dengan metode
parity.
2.2.3 Stop bit
Bila terakhir yang ditambahkan pada deretan bit data oleh bagian pengirim disebut
stop bit. Stop bit ini berlevel 1, digunakan untuk menunjukkan akhir dari pengiriman data 1

9
karakter. Jumlah stop bit dapat bermacam-macam yaitu bisa 1, 11/2, 2 tergantung sistem yang
dipilih.
2.3 Sistem DATANIM
Sistem DATANIM buatan Canberra yaitu Telecomputer Interface Model 6726,
Single/Dual Axis Positioner Model 6647/6648 dan Dual Counter/Timer model 6326
berkomunikasi melalui suatu jalur informasi tunggal yang disebut bus data terdiri atas 22
kabel dan semua modul DATANIM ini dihubungkan secara paralel. Sistem DATANIM yang
dipakai adalah modul-modul operasional yaitu modul keluaran dan kontrol, serta sistem
eksekutif yaitu modul yang mengkoordinasikan seluruh sistem. Modul operasional yang
dipakai adalah dual counter/timer (6326) sebagai modul data akuisisi intensitas radiasi dan
dual/single axis positioner (6648/6647) sebagai kontrol posisi. Modul eksekutif yang dipakai
adalah telecomputer interface (6726) yang mengkoordinasikan kerja seluruh sistem dan
berfungsi sebagai antarmuka dengan komputer. Masing-masing modul diberi alamat dengan
dua digit.
2.3.1 Modul 6726
Modul 6726 atau antarmuka model 6726 memberikan fasilitas komunikasi serial full
duplex, yaitu suatu metode komunikasi data antara sistem datanim dengan komputer, dimana
sinyal data ditransmisikan dalam dua arah pada jalur yang sama secara simultan (bersamaan).
Modus operasi pada modul 6726 dapat melaksanakan sebelas perintah operasi yang dapat
diprogram untuk menggerakkan atau mengatur posisi motor, mencacah dan mengambil data.
Diagram blok fungsional modul 6726 dapat dilihat pada Gambar 2.4. yang terdiri atas :
1. Masukan/keluaran data serial
2. Antarmuka bus-data
3. Clock system (sistem lonceng)
4. Timing pulse generator
5. Program counter
6. Data storage/stored data gating/fixed data gating.

10
Gambar 2.5
Diagram blok Fungional 6726
Modul 6726 akan melaksanakan satu dari sebelas hard-wired perintah sebagai
tanggapan perintah-perintah yang diterima melalui logika masukan serial. Urutan-urutan
perintah diatur oleh program counter, berisi sepuluh tingkat shift register yang
mendefinisikan kerja yang harus dilakukan pada setiap perintah dalam program. Mula-mula
data diperiksa oleh bagian masukan. Jika karakter tersebut memenuhi syarat (sudah
didefinisikan), Program Counter memerintahkan agar data disimpan dalam Data Storage.
Timing Pulse Generator menambahkan hitungan pada program counter sehingga step
perintah berikutnya mulai dikirimkan oleh Program Counter ke Data Storage untuk diperiksa
tipe karakter dan dihasilkan op-code ke program counter. Kemungkinan-kemungkinan tipe
karakter yang diterima adalah :
1) Karakter data
2) Karakter kontrol yang terdiri dari karakter-karakter: reset, start, eksekusi, dan
kontinu
3) Karakter instruksi yang menentukan modus operasi yang harus dilakukan.
Modus operasi ini antara lain instruksi-instruksi pengambilan data, gerak
motor, baca data, dan lain-lain.
11
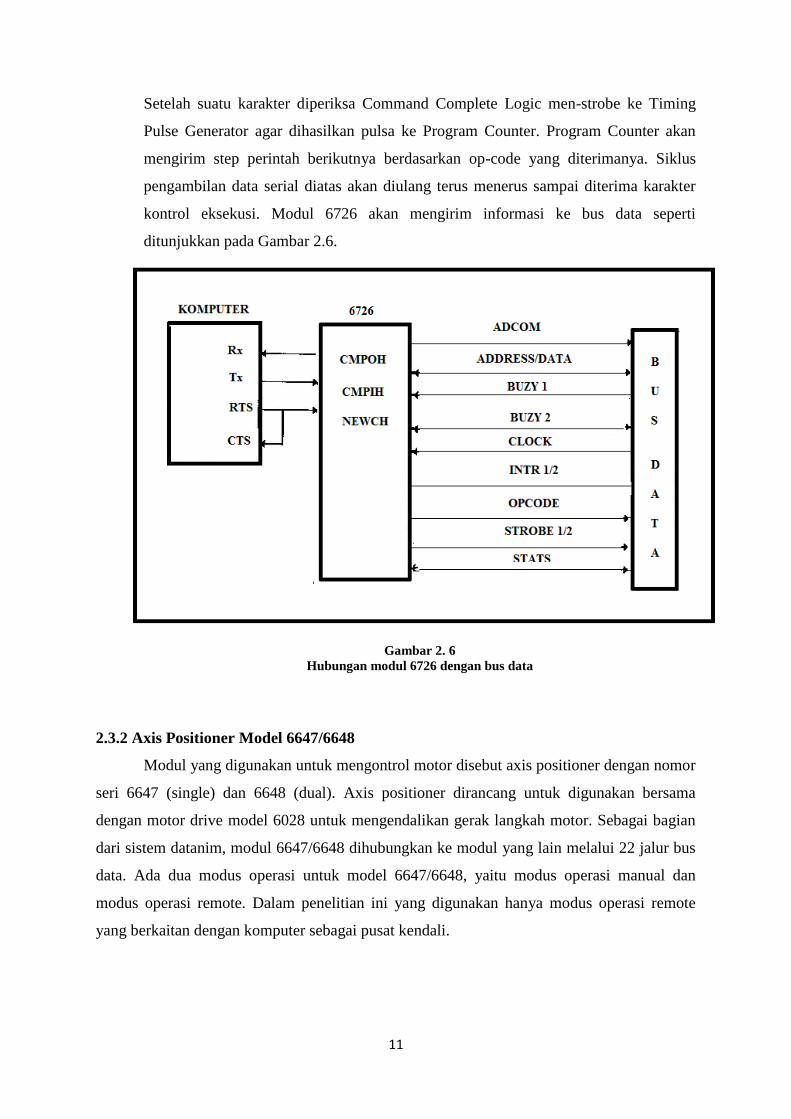
Setelah suatu karakter diperiksa Command Complete Logic men-strobe ke Timing
Pulse Generator agar dihasilkan pulsa ke Program Counter. Program Counter akan
mengirim step perintah berikutnya berdasarkan op-code yang diterimanya. Siklus
pengambilan data serial diatas akan diulang terus menerus sampai diterima karakter
kontrol eksekusi. Modul 6726 akan mengirim informasi ke bus data seperti
ditunjukkan pada Gambar 2.6.
Gambar 2. 6
Hubungan modul 6726 dengan bus data
2.3.2 Axis Positioner Model 6647/6648
Modul yang digunakan untuk mengontrol motor disebut axis positioner dengan nomor
seri 6647 (single) dan 6648 (dual). Axis positioner dirancang untuk digunakan bersama
dengan motor drive model 6028 untuk mengendalikan gerak langkah motor. Sebagai bagian
dari sistem datanim, modul 6647/6648 dihubungkan ke modul yang lain melalui 22 jalur bus
data. Ada dua modus operasi untuk model 6647/6648, yaitu modus operasi manual dan
modus operasi remote. Dalam penelitian ini yang digunakan hanya modus operasi remote
yang berkaitan dengan komputer sebagai pusat kendali.

12
Gambar 2.7.
Diagram blok rangkaian Axis Positioner
A. Position Counter
Position counter adalah rangkaian pencacah (counter) yang digunakan untuk
mencatat posisi absolut motor. Pada dasarnya pencacah ini terdiri dari lima buah
pencacah BCD (Data Control Board) maju/mundur (BCD up/down counter) dengan
bagian peraga yang menggunakan BCD to seven segment decoder untuk menyalakan
LED. Pulsa umpan balik dari rangkaian motor drive memberikan masukan borrow
dan carry sehingga pencacah selalu mencatat gerak perputaran motor. Jika perputaran
motor searah jarum jam, pulsa umpan balik memberikan masukan carry, dan
sebaliknya jika perputaran motor berlawanan arah dengan jarum jam, pulsa umpan
balik memberikan masukan borrow ke pencacah.
B. Address Axis Positioner
Dalam buffer address, delapan bit alamat masuk ke rangkaian Decoder
Address. Bila bit-bit alamat masukan sama dengan bit-bit program, keluaran dari

13
Decoder Address akan rendah. Pulsa strobe akan mengaktifkan peng-addressan
tersebut dan hal ini berlaku selam perintah address (ADCOM) tinggi.
C. OPCODE
OPCODE menentukan jenis operasi yang harus dilaksanakan, antara lain
perintah-perintah transfer data (Baca/Tulis), start, reset, dan stop. OPCODE pertama-
tama akan dibaca oleh setiap modul Datanim.
D. Read/Write Logic
Stats memberikan informasi status red/write. Selama waktu transfer data, stats
diset tinggi oleh Strobe2 dan ditransmisikan ke bus data.
E. Scan
Data karakter yang diterima Modul 6647/6648 sebanyak 7 digit dilaksanakan
oleh perintah scan. Dua digit pertama disimpan sebagai informasi kecepatan dan arah.
Lima digit terakhir masuk ke scan counter sebagai panjang scan. Melalui beberapa
tahap scaler clock 1 kHz dibagi menjadi delapan macam frekuensi yang akan
digunakan sebagai deretan pulsa ke motor. Frekuensi-frekuensi tersebut
dimultiflekskan dengan keluaran multiplexer yang bergantung pada digit laju.
Perintah scan ke motor dicatat oleh scan counter, kemudian perintah start segera
dimulai. Bila control logic menerima perintah start, maka control logic akan
mengirimkan pulsa dan perintah arah ke motor drive agar motor dijalankan. Pulsa
umpan balik dari motor drive digunakan untuk mengurangi hitungan scan counter.
Jadi scan counter selalu melakukan perhitungan mundur menuju nol, dan position
counter mencatat posisi absolut motor. Untuk menghentikan putaran motor,
digunakan perintah RESET. Selama motor masih berputar, BUZY 1 diset tinggi. Pada
akhir putaran motor, scan counter akan menghasilkan pulsa interupsi INTR 1 ke bus
data agar modul 6726 segera memberikan pelayanan.
F. Penggerak Motor
Penggerak motor (motor drive) model 6028 merupakan bagian dari sistem
Datanim yang dikontrol oleh Axis Positioner untuk menjalankan motor. Rangkaian
logika masukan mengubah deretan pulsa masukan dari axis positioner menjadi bentuk
gelombang empat fasa sesuai dengan keperluan operasi motor. Isyarat empat fasa ini

14
mengotrol arus sampai dengan 1,5 Ampere untuk masing-masing kumparan motor.
Catu tegangan DC dengan prinsip resonansi, membangkitkan suatu tegangan yang
sebanding dengan frekuensi deretan pulsa (pulsa train). Tegangan akan meningkat bila
kecepatan motor ditambah, sehingga memberikan torka yang sesuai dengan laju pulsa.
Tiap pulsa yang diterima Motor Drive Model 6028 akan menghasilkan putaran motor
1 step (1,8o). Frekuensi deretan pulsa masukan (f) oleh bagian scaler dibagi menjadi f,
f/2, atau f/4 dan diumpankan ke Axis Positioner. Frekuensi pulsa umpan balik tersebut
dihitung oleh Position Counter, disesuaikan dengan mekanik yang digerakkan oleh
motor agar diperoleh pembacaan yang benar. Motor drive model 6028 ini
dihubungkan ke stepping motor untuk menggerakkan beban.
2.4 Dual Counter/Timer Model 6326
Dual counter/timer model 6326 merupakan bagian pencacah dengan dua saluran dan
sepasang peraga LED enam digit. Dual counter/timer dapat digunakan sebagai counter kedua-
duanya maupun sebagai counter dan timer. Pada umumnya untuk peralatan difraktometer
neutron keduanya digunakan sebagai counter untuk mencacah banyaknya neutron yang
mengenai cuplikan (sample), dan yang lain untuk mencacah banyaknya neutron yang
dihamburkan. Dual counter/timer akan berhenti melakukan pencacahan bila salah satu
diantaranya mencapai kondisi preset.
2.4.1 Prinsip kerja Counter/Timer
Diagram blok rangkaian sebuah counter/timer ditunjukan pada Gambar 2. . Saklar
“count/time” digunakan untuk mendefinisikan jenis preset yang dipilih.
A. Address Counter/Timer
Informasi alamat dari bus data disimpan dalam Buffer Address kemudian
dimasukkan kerangkaian Address Decoder. Bila bit-bit alamat sama dengan bit-bit
program, maka keluaran Address Decoder akan rendah. Peng-addressan aktif selama
perintah address (ADCOM) tinggi.
B. Preset
Pulsa-pulsa yang diakumulasikan dapat diperoleh dari Clock System (sistem lonceng)
atau deretan pulsa masukan. Bila saklar “Count/Time” pada posisi “Count” (preset
count), deretan pulsa masukan (input) yang akan dicacah oleh scaler. Jika kondisi
preset tercapai, pulsa-pulsa masukan tidak dapat masuk ke scaler oleh masukan
“Gate”, sehingga proses pencacahan berhenti. Jika saklar “Count/Time” berada pada

15
posisi “Time” (preset time), gelombang pulsa 100 Hz (lebar pulsa 10 ms) yang diolah
dari Clock System akan dicacah oleh scaler.
Tiap Counter/Timer dapat dipilih nilai presetnya dengan mengirimkan dua
digit nilai preset dalam bentuk 𝑛 × 10𝑚 , dimana n adalah digit 0 − 9, dan m adalah
digit 0 − 6. Bila sebuah Counter/Timer sudah mencapai kondisi preset yang
ditentukan, Preset Logic akan membangkitkan sebuah pulsa interrupt out yang
digerbangkan ke bus data sebagai INTR1/INTR2. Counter/Timer yang lain akan
menerima INTR1/INTR2 sebagai perintah stop dan modul 6726 akan membangkitkan
sebuah karakter “Completion” ke komputer.
C. OP-CODE
OP-CODE yang diterima dari bus data menentukan operasi yang harus dilaksanakan
oleh Counter/Timer. OP-CODE itu antara lain instruksi-instruksi transfer data
(Read/Write) dan kontrol (start, stop, reset). OP-CODE start memberikan sinkronisasi
kedua kanal. Scaler direset ke nol dan operasi pencacahan dimulai. Pulsa-pulsa ke
scaler diaktifkan oleh Clock System bus-data. Selama operasi pencacahan, BUZY1
ditransmisikan ke bus-data. OP-CODE Stop menghentikan proses pencacahan, buffer
register diperbaharui dan isinya diperagakan ke peraga LED. OP-CODE Reset
digunakan untuk me-reset scaler, tetapi isi Buffer Register tidak berubah.
2.4.2 Transfer Data
Operasi transfer data antara Modul 6326 dengan komputer ada tiga, diantaranya :
1. Pembacaan isi Buffer Register oleh komputer.
Tiap digit isi buffer data akan dikirimkan serial ke bus data menjadi bilangan ASCII.
2. Pembacaan Status Register
Satu digit dari status register dapat dibaca, dengan bit-bit yang menunjukkan kondisi
overflow, sibuk atau sudah tercapai kondisi preset.
3. Penulisan dua digit nilai preset.
Dua digit nilai preset dapat diberikan dari komputer jika roda saklar yang digunakan
untuk menentukan nilai preset dengan cara manual, pada panel depan Counter/Timer
diatur pada posisi 00.
2.5 Kartu Komunikasi Asinkron Intel 8250
Bagian utama adapter komunikasi asinkron adalah chip IC 8250 sebagai input/output
yang dapat diprogram dan digunakan untuk keperluan komunikasi asinkron. Diagram blok

16
komunikasi asinkron dapat dilihat pada Gambar 2.4. Generator baud rate dapat diprogram
dan harus dimuatkan sebelum adapter beroperasi. Status isyarat kontrol dapat diperiksa
dengan sistem perangkat lunak.
Pada komunikasi data asinkron, sinkronisasi dilakukan pada setiap karakter. Kode
data seri yang sering digunakan adalah kode ASCII dengan 7 bit karakter. Bit data nol
merupakan bit pertama yang ditransmisikan atau diterima. Adapter secara otomatis
menyisipkan bit start, bit stop, dan paritas. Format data yang diterima dapat diperiksa pada
line control register. Dalam keadaan tidak ada data (idle), jalur transmisi berada pada keadaan
tinggi (mark), sedangkan bit start selalu ada pada keadaan rendah (space). Transisi dari
keadaan idle ke keadaan space atau dari bit stop ke bit start, digunakan sebagai tanda awal
penerimaan suatu karakter. Sesudah bit data terakhir di transmisikan, jalur transmisi kembali
ke keadaan tinggi, paling sedikit 1 waktu bit.
Gambar 2.9 Diagram Blok adapter Komunikasi

17
IC INTEL 8250 mempunyai sejumlah register yang dapat diakses atau dapat dikonrol
dengan program melalui processor. Register-register tersebut digunakan untuk mengontrol
operasi pengiriman atau penerimaan data dari INTEL 8250. Register-register tersebut
diantaranya :
1. Line Control Register.
Register ini merupakan protokol komunikasi. Melalui LCR ini, seorang programer
dapat mengubah format asynchronous data communication dan mengambil isinya
untuk diperiksa.
2. Line Status Register (LSR)
Register ini memberikan informasi ke processor mengenai status transfer data.
3. Interrupt Identification Register (IIR)
IIR ini digunakan untuk menentukan prioritas interupsi
4. Interrupt Enable Register (IER)
IER ini digunakan untuk membuka dan menutup interupsi
5. Modem Control Register (MCR)
Modem control register ini digunakan untuk mengontrol hubungan antara DTE (Data
Terminal Equipment) dengan modem.
6. Modem Status Register
Modem status register memberikan informasi pada processor mengenai status jalur
kontrol dari modem.
7. Receiver Buffer Register (RBR)
RBR ini merupakan register yang digunakan untuk menyimpan karakter yang
diterima.
8. Transmitter Holding Register (THR)
THR adalah register yang digunakan untuk menyimpan karakter yang akan
dikirimkan.

18
BAB III
METODOLOGI PENELITIAN
3.1 Perangkat Lunak Difraktometer Neutron
Dalam sub bab ini akan dibahas pembuatan subrutin-subrutin dalam bahasa Pascal,
yang digunakan untuk berkomunikasi dengan axis pisitioner model 6647/6648 dan dual
counter/timer model 6326 modul antarmuka 6726. Dari subrutin-subrutin tersebut akan
dibuat sebuah contoh program aplikasi untuk menjalankan difraktometer neutron.
3.1.1 Protokol komunikasi
Untuk menghubungkan komputer dengan modul antarmuka 6726 menggunakan
terminal port IO serial. Hubungan terminal-terminal antar modul antarmuka 6726 dengan
komputer ditunjukkan pada Gambar 2. 5.
Gambar 3.1.. Sambungan terminal-terminal antarmuka serial komputer
dengan modul 6726
Level tegangan isyarat yang digunakan sesuai dengan pembakuan EIA yang disebut
RS-232C. Format data yang digunakan terdiri atas bit start, 7 bit data tanpa paritas, dan bit
stop. CMPOH menyatakan keluaran serial ke komputer, CMPIH menyatakan masukan serial

19
dari komputer, dan NEWCNH menyatakan character request input. Subrutin-subrutin yang
digunakan sebagai protokol komunikasi adalah :
Procedure INISIALISASI_8250; begin portw line_control_reg ≔ $80; portw baud_div_msb ∶= $00; (∗ baud rate yang dipilih ∗)
portw baud_div_lsb ∶= $60; (∗ 1200 baud ∗)
portw line_control_reg ∶= $02; (∗ 1 stop bit, 7 bit data, tanpa paritas ∗)
end;
Procedure RTS;
begin port modem_control_reg ≔ $03;
end;
Procedure diatas dipanggil pada awal program sebelum adapter komunikasi asinkron
IBM beroperasi. Baud-rate yang dipilih untuk komunikasi antara antarmuka dan komputer
1200 yang terhubung pada kaki 14 di terminal antar-muka 6726.
3.1.2 Pengiriman Data Karakter
Karakter suatu intruksi yang diterima oleh modul 6726 adalah karakter ASCII. Mula-
mula karakter diperiksa oleh Transmitter Holding Register Empty (THRE). Jika sudah
kosong, karakter tersebut akan dimuat ke Rx register untuk ditransmisikan ke modul antar-
muka 6726. Berikut ini adalah subrutin yang digunakan ntuk memeriksa register-register
tersebut dan menangani pengiriman data karakter. Function untuk memeriksa register-
register:
function TxReady ∶ boolean; var TimeOut, lsr : byte;
TxR ∶ boolean; begin
TimeOut ∶= 0; Repeat
lsr ≔ port Line, Status, Reg ; (∗ Periksa THRE dan TSRE ∗)
if lsr and $60 = $60 then TxR ∶= true else TxR ∶= false; TimeOut ∶= TimeOut + 1;
Until TxR or TimeOut > 2000 ; ifTxR then TxReady ∶= true else TxReady ∶= false;
end;
Function untuk menangani pengiriman data karakter:
Procedure Transmit (cmd : Str15);
var i : integer
ch : char;
begin

20
for i ≔ 1 to lenght cmd do
begin
If TxReady then
Begin
ch ∶= chr(Rx); port Tx_Buffer ≔ ord(ch);
end;
end; delay(100);
end;
3.1.3 Penerimaan Data Karakter
Komputer menerima data karakter ASCII dari Modul 6726. Pada modus terima data,
format data diperiksa terlebih dahulu yaitu dengan memeriksa bit-bit pada Line Status
Register agar tidak terjadi kesalahan paritas (Parity-Error), framing-error atau ever-run-error.
Subrutin yang memeriksa kebenaran format data dan menangani penerimaan data karakter
adalah sebagai berikut :
Function untuk memeriksa kebenaran format data:
function RxReady ∶ boolean;
var TimeOut, lsr : byte;
DR, errorn ∶ boolean; begin
TimeOut ∶= 0; error ∶= false;
repeat lsr ≔ port Line, Status, Reg ; (∗ Periksa apakah over − run dan framing error ∗)
if lsr and $OA <> $0 𝑡ℎ𝑒𝑛 𝑒𝑟𝑟𝑜𝑟 ∶= 𝑡𝑟𝑢𝑒 𝑒𝑙𝑠𝑒 𝑒𝑟𝑟𝑜𝑟 ∶= 𝑓𝑎𝑙𝑠𝑒; TimeOut ∶= TimeOut + 1;
Until not error or TimeOut > 20000 ; (∗ Periksa apakah data ready ∗)
if lsr and $01 = $01 then DR ∶= true
else DR ∶= false
(∗ Bila format data benar dan Data Ready beri flag ∗)
if not error and DR then RxReady ∶= true
else RxReady ∶= false; end;
Function yang berfungsi untuk menangani penerimaan data karakter :
Procedure Recceive (var ch : char);
var Rx :byte;
begin
If RxReady then
begin
Rx ≔ port Rx_Buffer ; ch ∶= chr(Rx);
end;
end;

21
Berikut ini adalah subrutin yang berfungsi untuk menggeser lengan detektor sebanyak
N step. Jika lengan detektor mengenai saklar, program akan dibatalkan karena melewati
daerah gerak lengan detektor yang sudah dipilih.
Procedure Position Cmd: Str15 ;
var finish : boolean;
ch ∶ char; begin
finish ∶= false; Transmit(cmd);
repeat if RxReady then
begin
Receive(ch); if ch = ′)′ then
finish ∶= true; if ch ∶=′/′ then
begin
writeln ′Limit switch …… . Program aborted′ ; Transmit ′$′ ; stopRTS; halt;
end;
end; write ′.′ ; delay(100)
until finish
writeln(„Position Finish‟);
end;

22
BAB IV
HASIL DAN PEMBAHASAN
Dalam penelitian ini digunakan simulasi dengan sumber standar neutron Americium
Berelyum (Am-Be), mengingat reaktor yang biasanya digunakan sebagai sumber neutron
belum beroperasi dan sedang dalam masa up-grading untuk ditingkatkan dayanya dari 1 M
Watt menjadi 2 M Watt. Detektor yang digunakan yaitu BF3 dengan tegangan kerja sebesar
1150 V. Pulsa yang berasal dari detektor diperkuat oleh penguat awal dan selanjutnya
diperkuat oleh amplifier. Pulsa ini kemudian dimasukkan ke Dual Counter/Timer. Preset time
yang digunakan selama 10 menit untuk setiap cacahan. Percobaan ini dilakukan dari sudut 0
– 70o dengan perpindahan setiap langkah sudut sebesar 0,5
o.
Percobaan dilakukan dengan menjalankan program PROGDIF.EXE., yang merupakan
hasil compile dari program PROGDIF.PAS yang ditulis menggunakan bahasa Turbo Pascal.
Pilihan menu “MANUAL” dapat dimanfaatkan untuk memeriksa kerja sistem DATANIM
sekaligus mengingat kembali alamat masing-masing modul. Setelah operasi Manual berjalan
dengan baik, baru operasi On-Line dilaksanakan. Data instruksi disimpan dalam file
Trisna.CMD. Menu “RUN” merupakan pilihan untuk menjalankan instruksi-instruksi yang
disimpan dalam file instruksi Trisna.CMD.
Hasil data pengamatan dapat dilihat pada layar monitor komputer dengan pilihan
menu “Lihat Data” atau dicetak ke printer dengan pilihan menu “Cetak Data”. Pada Tabel 5.1
ditunjukkan hasil data pengamatan. Dari hasil data pengamatan dapat dibuktikan bahwa
difraktometer neutron dan sistem DATANIM dapat diotomatisasi dengan perangkat lunak
menggunakan komputer. Program aplikasi tersebut masih dapat dikembangkan untuk
keperluan analisa data.
Tabel 4.1
Data Eksperimen Difraksi Neutron
Sudut Count Sudut Count Sudut Count Sudut Count
0.00
2.00
4.00
6.00
8.00
10.00
7969
7122
6585
6171
5934
5710
0.50
2.50
4.50
6.50
8.50
10.50
7799
7004
6481
6075
5848
5410
1.00
3.00
5.00
7.00
9.00
11.00
7461
6858
6314
6120
5751
5399
1.50
3.50
5.50
7.50
9.50
11.50
7167
6699
6489
5934
5521
5401

23
12.00
14.00
16.00
18.00
20.00
22.00
24.00
26.00
28.00
30.00
32.00
34.00
36.00
38.00
40.00
42.00
44.00
46.00
48.00
50.00
52.00
54.00
56.00
58.00
60.00
62.00
64.00
66.00
68.00
70.00
5529
5199
5033
4900
4663
4651
4464
4375
4276
4139
4080
3988
4097
3822
3851
3837
3668
3590
3555
3619
3450
3381
3427
3278
3194
3154
3137
2954
2852
2724
12.50
14.50
16.50
18.50
20.50
22.50
24.50
26.50
28.50
30.50
32.50
34.50
36.50
38.50
40.50
42.50
44.50
46.50
48.50
50.50
52.50
54.50
56.50
58.50
60.50
62.50
64.50
66.50
68.50
0.00
5453
5079
5028
4754
4713
4622
4361
4420
4182
4113
4085
3991
3856
3982
3776
3726
3641
3555
3605
3551
3413
3317
3317
3338
3249
3107
3065
2977
2839
0.00
13.00
15.00
17.00
19.00
21.00
23.00
25.00
27.00
29.00
31.00
33.00
35.00
37.00
39.00
41.00
43.00
45.00
47.00
49.00
51.00
53.00
55.00
57.00
59.00
61.00
63.00
65.00
67.00
69.00
0.00
5232
5058
4918
4700
4599
4546
4445
4348
4243
4131
4024
3892
3990
3861
3774
3680
3679
3635
3418
3390
3342
3361
3372
3167
3224
3032
2925
2879
2778
0.00
13.50
15.50
17.50
19.50
21.50
23.50
25.50
27.50
29.50
31.50
33.50
35.50
37.50
39.50
41.50
43.50
45.50
47.50
49.50
51.50
53.00
55.00
57.00
59.50
61.50
63.50
65.50
67.50
69.50
0.00
5281
5017
4878
4633
4770
4514
4402
4312
4197
4154
3965
3984
3953
3796
3686
3728
3540
3604
3475
3392
3418
3323
3330
3304
3067
3102
3040
2885
2740
0.00

24
BAB V
KESIMPULAN
Kesimpulan yang diperoleh dari hasil penelitian yang telah dilakukan adalah:
1) Telah dilakukan perbaikan pada perangkat lunak untuk menggerakkan Difraktometer
Neutron yang menggunakan bahasa pemrograman Turbo Pascal versi 5.0 dan pada
perangkat keras yaitu pada kabel penghubung antara alat pencacah dan antarmuka,
serta beberapa alat lainnya.
2) Perangkat lunak tersebut telah berhasil menggerakkan simulasi Difraktometer
Neutron dengan menjalankan program PROGDIF.EXE yang merupakan hasil
compile dari program PROGDIF.PAS.
3) Hasil yang diperoleh dari simulasi Difraktometer Neutron dengan menggunakan
program PROGDIF.EXE ditampilkan berupa data seperti terlihat pada Tabel 4.1.

25
DAFTAR PUSTAKA
Dual Counter/Timer Model 6326, Canberra Industries, INC
Dual Axis Positioner Model 6647 and 6648, Canberra Industries, INC
Gunawan, G, 1991, Memanfaatkan Serial RS-232-C, PT Elex Media Komputindo Kelompok
Gramedia
Heru Pranowo, B, 1986, Pengontrolan Data Difraktometer Neutron dengan Komputer,
Proceding Seminar Teknologi Reaktor dan Pusat Listrik Tenaga Nuklir, PPTN
BATAN.
Hendro, 1997, Study Perangkat Lunak Difraktometer Neutron Menggunakan PC
Marsongkohadi, Kurniadi S, Djajusman, Illias Ginting, Zuharli, 1995, Pembuatan
Difraktometer Neutron untuk Penelitian Magnetisme, Kolokium Tek. El. Bakar
Nuklir Teknologi Reaktor dan Penggunaan Reaktor PPTN-BATAN
Sutrisno, 1983, Perangkat Keras Mikrokomputer, Jurusan Fisika FMIPA ITB